1. Introduction
In recent years, unmanned aerial vehicle (UAV) swarm has been increasingly used in military and civilian environments to perform some typical tasks, including traffic monitoring, disease surveillance, target tracking, area search and so on. Cooperative search is an important task of UAV swarm, and the improvement of the cooperative reconnaissance efficiency and intelligence is a research hotspot at home and abroad [
1,
2,
3,
4].
Many scholars have conducted extensive research. In traditional cooperative searching algorithms, region segmentation and assignment are an important strategy. Considering that UAVs often fly into the region from a unilateral side, unilateral region segmentation for the equal area method of the arbitrary search region is proposed. Each area grid is assigned to one UAV agent for scanning search [
5]. The Voronoi polygon topology is usually used as a tool for region division. Based on the central Voronoi configuration, reference [
6] realizes the optimal searching coverage of an unknown area and the optimal deployment of the searching cost consumption. The nonconvex environment is not conducive to UAV swarm for search execution; reference [
7] proposes a transforming method to transform the cooperative searching problem in the nonconvex region into an equivalent one in the convex region.
The early classical cooperative searching algorithms focus on the division and distribution of the searched area. In the searching process, the coordination between UAV agents in different grids is weak.
The mission environment is usually complex and, due to a lack of prior information, a set of mechanisms, such as the digital pheromone map (DPM) and the target probability map (TPM) are constructed for determining the flight directions [
8,
9]. The DPM is adopted to solve the swarm coordination problem, and the TPM accounts for the target guidance. The two information maps are updated in the moving process of UAVs, and the coordinates of UAV agents are recalculated by taking the cognitive information as the decision function.
The cooperative searching algorithms based on the two information maps, including DPM and TPM, can avoid collision and repeated search as much as possible. However, factors such as resource consumption and path optimality are not considered in these cooperative searching strategies. Therefore, the heuristic algorithms attract the attention of many researchers. Considering that multiple targets are usually randomly distributed in the mission area, the cooperative search is regarded as the traveling salesman problem (TSP) in some literature works. In the TSP, resource consumption and path optimization are optimized during optimization iteration. In reference [
10], an improved cooperative searching algorithm based on the non-dominated sorted genetic algorithm-II is put forward to solve a multi-objective optimization problem. The objective function combines the detection profit, energy consumption and flight distance criteria for obtaining the optimized searching routes of unmanned aerial vehicles (UAVs). In reference [
11], an improved harmony searching algorithm, taking maximum total reconnaissance as the fitness function, is adopted to search lots of targets in a given area under the condition of resource constraints. Similarly, a novel cooperative patrol task algorithm based on the improved push forward insertion heuristic (PFIH) algorithm is presented in reference [
12] to calculate the feasible patrolling routes for maximizing the patrol profit under the limited resources conditions.
UAVs often execute the cooperative search in an unknown environment with no prior information. In order to improve the searching efficiency and reduce the uncertainty of the mission area, many cooperative searching models based on the bio-heuristic algorithms, including the pigeon-inspired optimization (PIO), particle swarm optimization (PSO), bean optimization (BO), multiple ant colony optimization (MACO) and co-evolution genetic algorithm (CEGA), are built, as shown in references [
13,
14,
15,
16,
17,
18,
19]. In these heuristic algorithms, UAVs are analogized as some particles or gene segments. The intelligent cooperative searching behaviors of UAV swarm under many constraints are generated by the interaction between the particles and the cross variation of gene segments for achieving the feasible rewarding function, such as the coverage rate, targets discovering profits, cooperation profits and so on. The designed algorithms can be adopted to obtain the optimal results for realizing the overlaying search and targets discovery of the region effectively. The reinforcement learning (RL) scheme is used to study the cooperative search of multi targets in the unknown sea areas by UAVs in reference [
20]. In order to ensure searching efficiency, a reward and punishment function is built to generate a multi-UAV cooperative search path. In view of the trial-and-error mechanism of RL, this mechanism increases the computing burden. Therefore, it is not suitable for large-scale scenarios.
The cooperative searching algorithms based on the heuristic and RL mechanisms usually draw the conclusion by performing multi-objective iteration. The process often takes a long time to deal with the dynamic path planning task. With the increase in the agent numbers and the environmental complexity, the computational burden of UAV onboard the computer will increase. Therefore, a decentralized searching algorithm with real-time computation and sufficient intelligence becomes positively significant.
With the rapid development of UAVs and sensors, robotic swarms can conduct some complex mission or specific tasks by interacting with each other. In a decentralized swarm system, all agents can receive information from the other agents and the environment to decide on what to do next. Renolds et al. in reference [
21] propose typical local rules of swarm behavior. It is named the Boids model, which follows three local rules: collision avoidance, velocity matching and flocking centering. The Boids model can realize the flocking state and velocity alignment.
In most collective behaviors, it is hypothesized that each agent in the group tends to align its direction of motion with those of its neighbors. Vicsek et al. in reference [
22] bring the nearest neighbor principle into the Boids model. This model considers the change of the moving direction of the monomer. Therefore, the monomer can finally achieve the same moving direction, but this model cannot guarantee collision avoidance. Murakami et al. in [
23] suggest that the collective polarization arises from interactions other than the explicit alignment rule. Thus, a new lattice-based computational model that is based on mutual anticipation and asynchronous updating is proposed. The simulation shows that this model can realize densely collective motion with high polarity.
In order to overcome the drawbacks of recent papers on motion control for swarm, including the use of unbounded forces for collision avoidance, lack of scalability, irregular fragmentation and collapse, Reza O.S. in reference [
24] presents a theoretical and computational framework for the design and analysis of scalable flocking algorithms in a multi-dimension space in the presence or lack of obstacles. This analysis sheds light on the cooperation and emergence of collective behavior in complex organizations.
A bottom-up flocking model is suitable to improve the survivability of swarm in complex environment with obstacles. Zhu C.C. et al. in [
25] propose a control strategy of self-organization obstacle avoidance based on the conformal module and obstacle avoidance module. The conformal module is used to realize the directional consistency. In terms of avoidance module, the principle of earth deflection is used to increase the rotational force effect for collision between agents and obstacles to reach the mission point.
Constrained by the agent dynamic, communication delay, perturbations or the presence of barriers, the numerous existing flocking models cannot perform a sufficiently good collective behavior for full coverage or path generation from one point to another point. In order to make swarm better complete tasks and enhance environmental adaptability, the rule-based model and evolution algorithm are combined to generate the optimized control model for UAV swarm [
26,
27,
28,
29,
30]. The corresponding research results verify that this strategy can generate multi-objective optimization conclusions.
As for the area coverage of UAV swarm, Oleg A. Yakimenko et al. propose four local rules to achieve full coverage of the mission area and good communication connectivity [
31,
32]; then, the evolution algorithm is used to generate the optimized solution. The paper realizes the best coverage strategy, but environment uncertainty and target search are not considered.
The current research points mainly focus on the implementation of flocking rules and the single task with multiple constraints in the numerous existing flocking models. Considering the economy and efficiency, a multi-function swarm is needed. The tasks of the UAV swarm cooperative search are full area coverage, target detection and reduction in environmental uncertainty. The combination of these requirements makes the cooperative search of UAV swarm in a top–down manner a challenging problem. Conversely, the requirements are relatively easy to be realized in an emergent mode.
For improving the adaptability of UAV swarm to the environment and the various complex requirements, ESUSTPM is proposed. ESUSTPM is a novel searching method, and swarm searching behavior is shaped in a down–top manner. The down–top manner means that the high-level swarm behaviors are generated by the agent-to-agent interactions. The generation mode of the swarm searching behaviors determines that swarm shows high intelligence, high self-organization and adaptability in the emergent process. These characteristics improve the flexibility and survivability of UAV swarm in the cooperative search of the complex mission area.
As the proposed ESUSTPM is based on local rules, including the flocking and guiding rules, it enables UAV agents to realize the decentralized and online path planning. The main contributions of this study are as follows:
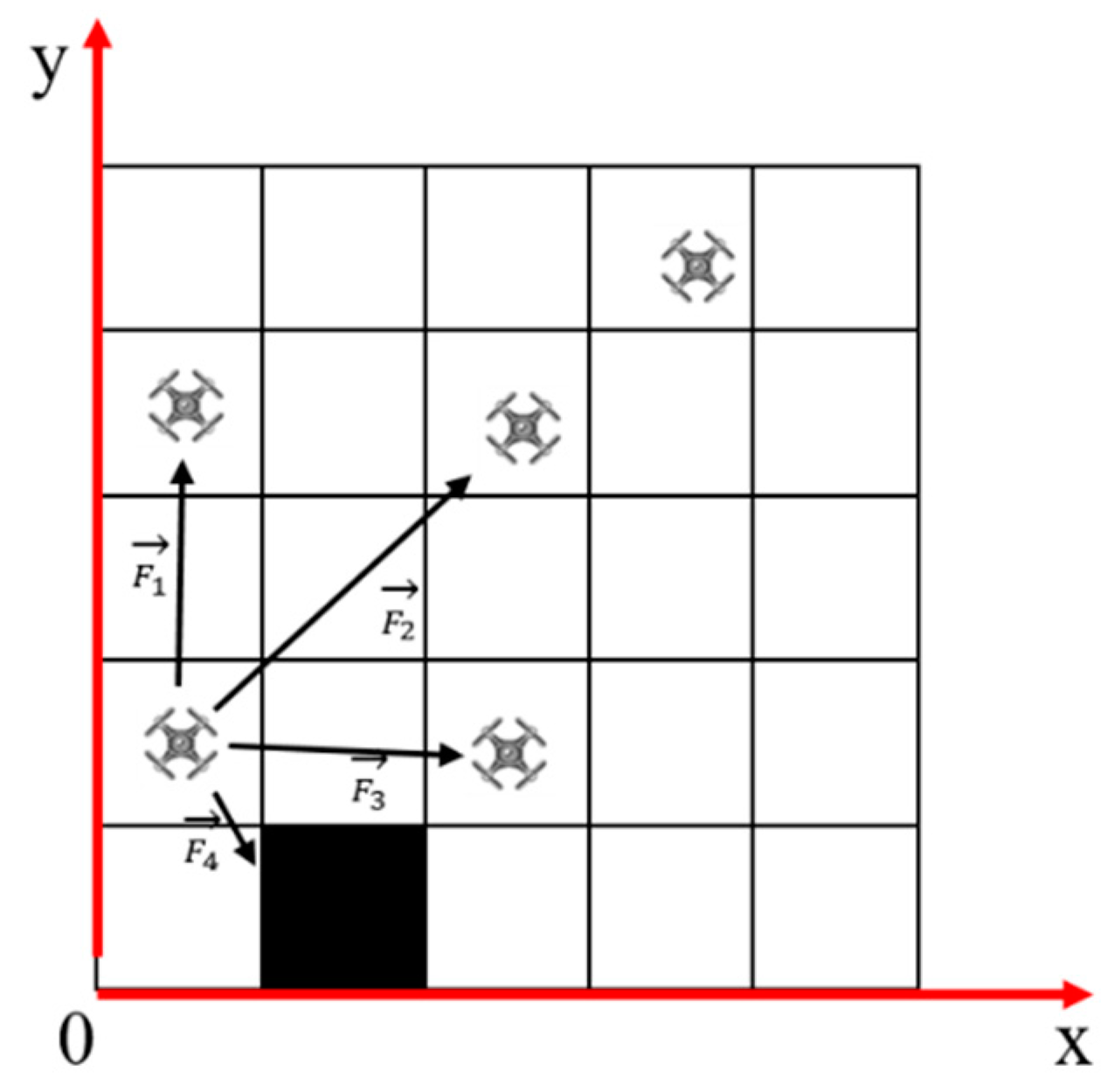
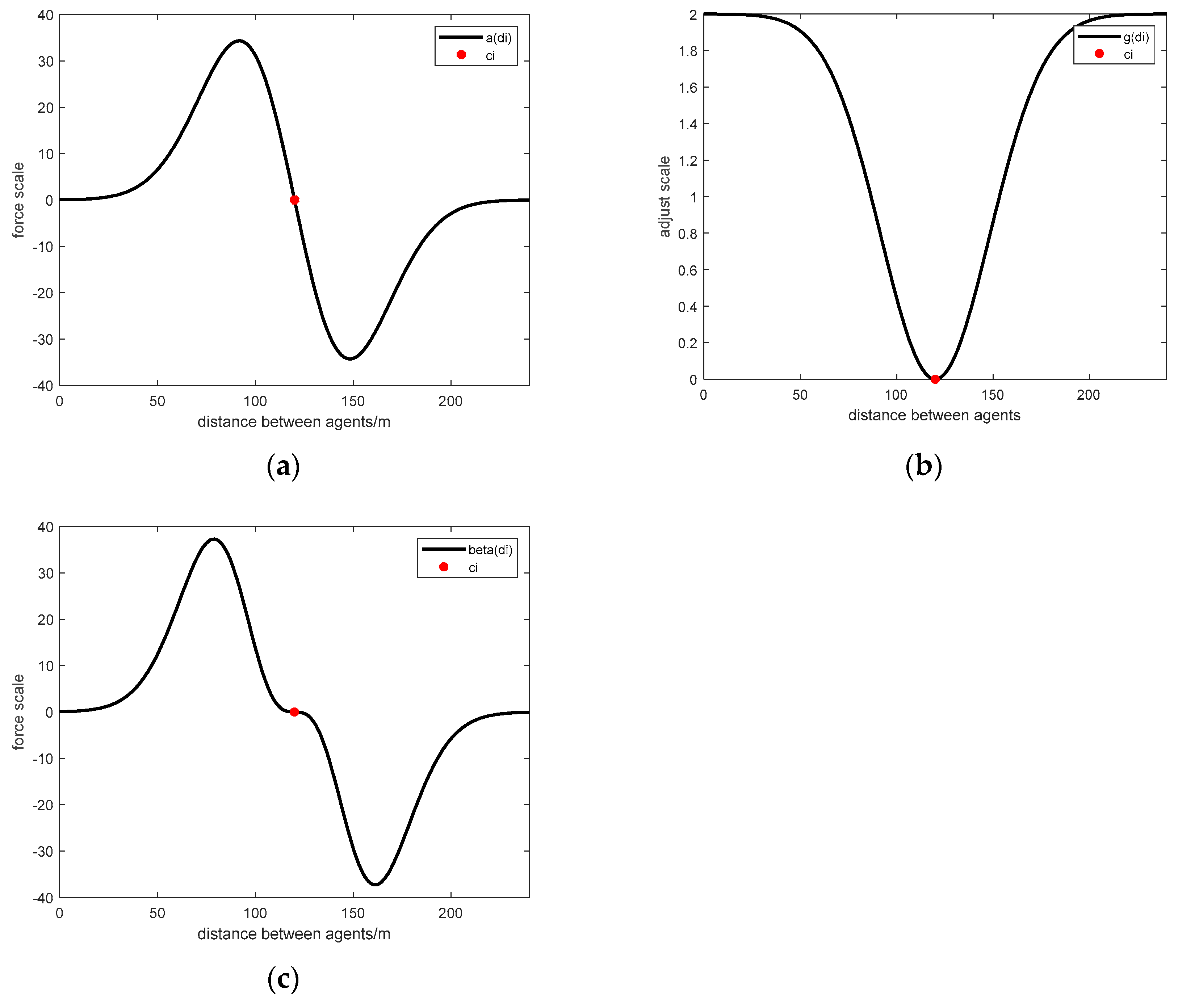
A new flocking rule based on a novel constructed function, which can realize smooth transition of the UAV states at the center points, is proposed. The constructed function is Equation (9), and it contains two exponential functions shown in Equations (7) and (8). Equation (8) is a typical flocking rule that was proposed in references [
20,
21]. The slope of the corresponding curve is so high at the center point that it is difficult to avoid state oscillation of the UAV. Therefore, a novel adjusting function in Equation (7) is proposed to adjust the curve slope of Equation (8) at the center point. Thus, the proposed curve proposed in Equation (9) can transit smoothly at the center point. This design realizes a smooth transition of the UAV states at the center points in theory. Finally, a more stable space between agents can be maintained.
A new guiding rule based on TPM is proposed. The guiding mechanism always guides the UAV to grids with the highest target existing probability. During access to the grids, TPM can be calculated and updated according to Equations (3)–(5). Therefore, the multi-functions of UAV swarm, including full area coverage, target detection and reduction in environmental uncertainty, can be realized.
The fault tolerance to prior information on the TPM is realized. In the ESUSTPM, the swarm can calculate and update the target existing probability (TEP) of each grid in the process of accessing the grids. If the target does exist in the visited grid, the TEP increases. Conversely, the TEP decreases. Thus, the error information can be overcome by adopting this mechanism.
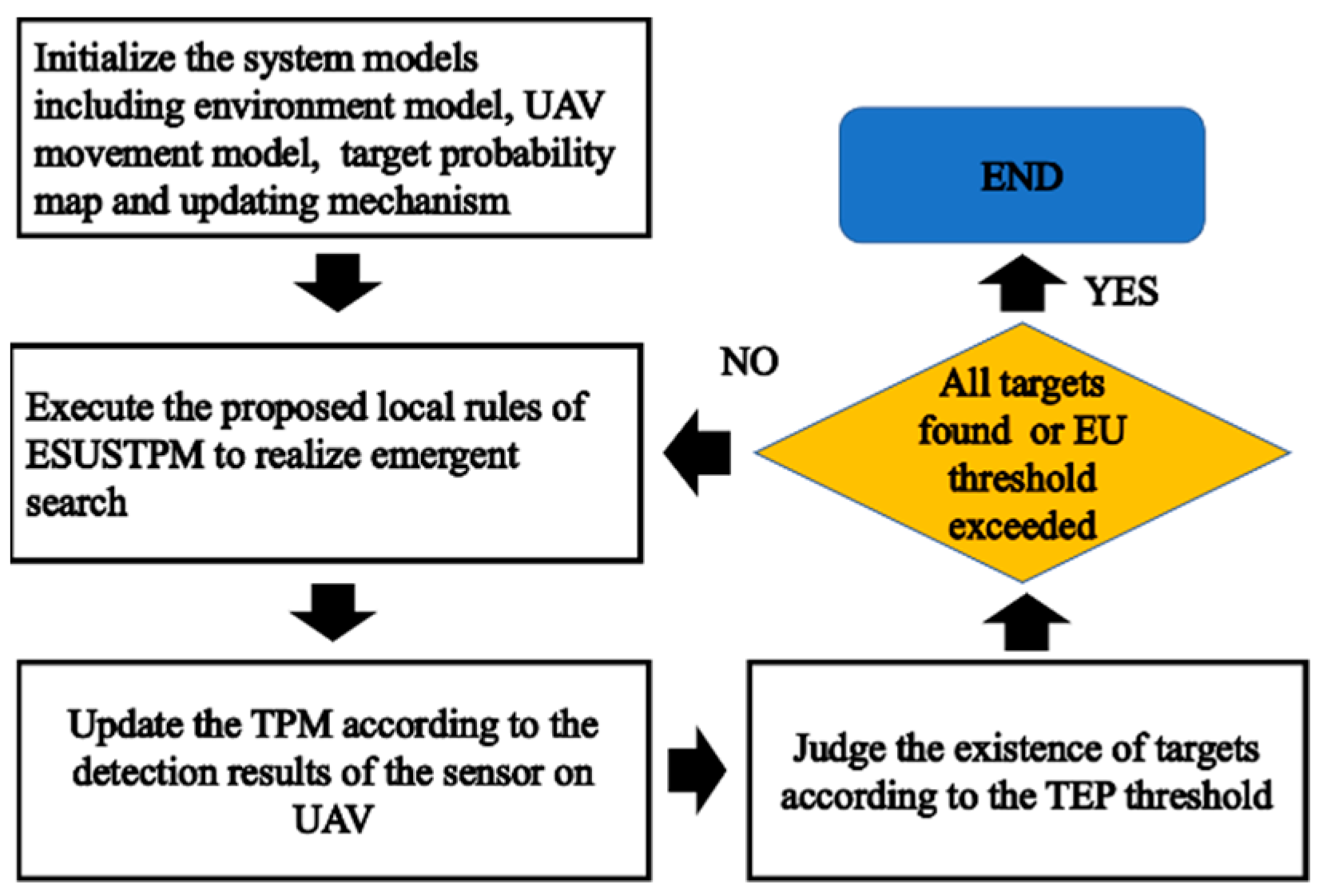
The contents of the article are organized as follows. In
Section 2, the mathematical models of ESUSTPM, including the environmental model, the UAV motion model and the target existing probability map, are built. In
Section 3, the local rules of ESUSTPM are introduced. In
Section 4, the steps of the corresponding searching algorithm are shown. To verify the proposed method, simulations are conducted in
Section 5. Finally, the summary and expectations are pointed out in
Section 6.
5. Simulation Experiment
To verify the feasibility and superiority of the proposed ESUSTPM method, three simulation scenarios are carried out in a rectangular area with a certain number of UAVs and targets.
Four searching algorithms, including the classical random searching algorithm, the mower searching algorithm, the searching algorithm based on Boids model with guidance and the searching algorithm based on Boids model without guidance, are used for comparative experiments. Three criteria, including the visited grid number, the environmental uncertainty and corresponding statistical metrics, are used as the metrics to verify the effectiveness of the ESUSTPM algorithm.
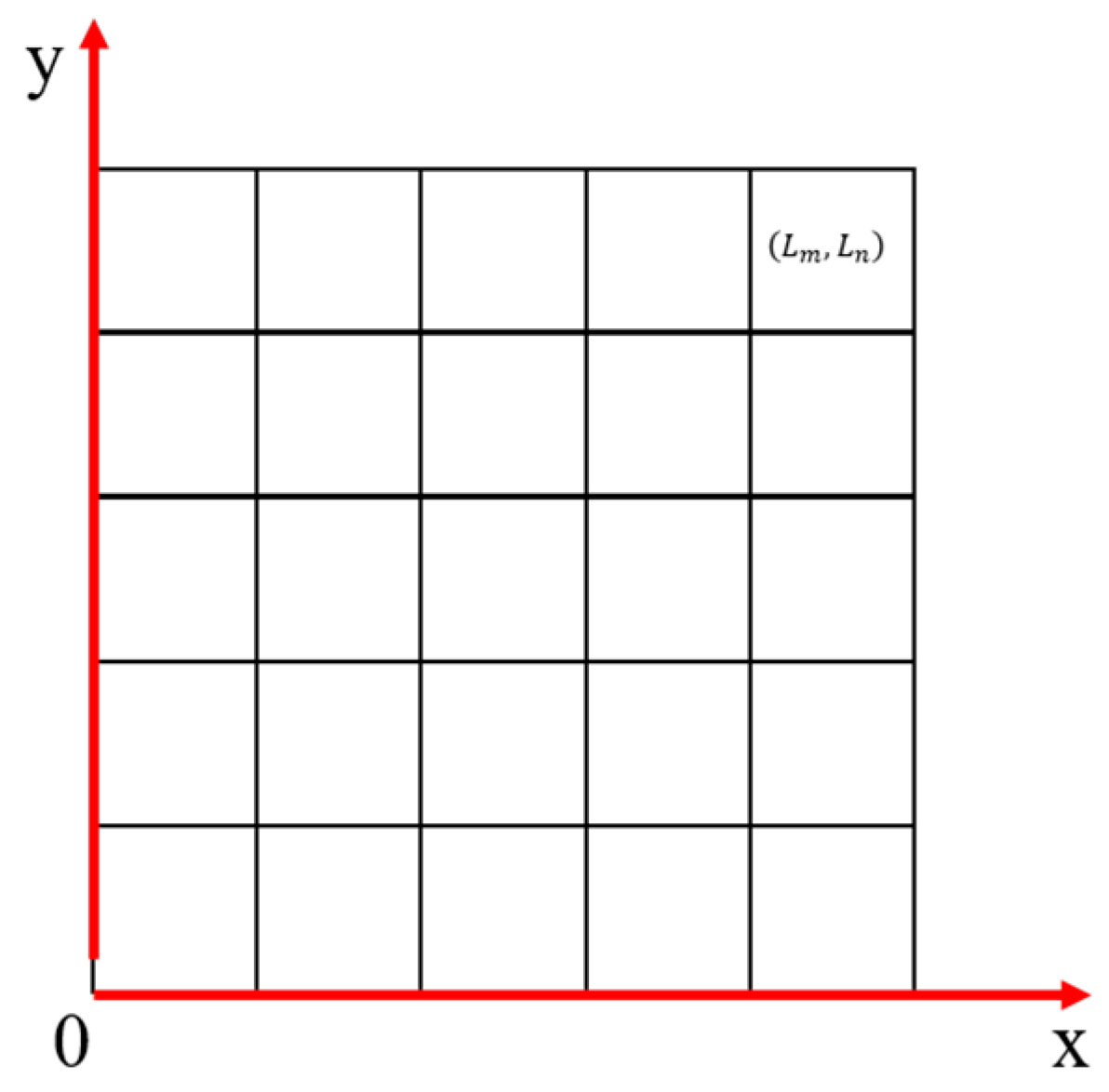
The simulation environment is written in Python, and the animation module in Matplotlib library is used to simulate the movement of UAV agents, the communication connectivity and the target existing probability. According to the proposed novel flocking rule, the agents repel each other when the distance between them is less than the safe distance. Therefore, the collision between agents can be avoided by the proposed local rule. When the agent meets the boundary, the velocity is reversed. Each agent is equipped with a radio for communication with other agents. For these experiments, the agents are assumed to have a downward-facing camera, and this setting can capture the below and eight neighboring grids for finding the objects of interest. This simulation does not emulate internal/external camera geometry and instead simply assumes that the area of interest can be divided into cells, and each agent can move freely and continuously across the entire area of interest. Each cell is smaller than the area covered by the camera at any given time. The mission area is evenly divided as
grids in the simulation of this paper. A total of 10 UAVs start from the coordinates (100, 100), (100, 200), (100, 300), (100, 400), (100, 500), (200, 100), (200, 200), (200, 300), (200, 400), (200, 500) to execute the cooperative searching mission separately. The maximum velocity of UAV agents is
. UAV swarm does not know the target positions at the initial time. UAVs should find the targets and cover the area in the emergent searching process as far as possible. The initial target probability of each grid shown in
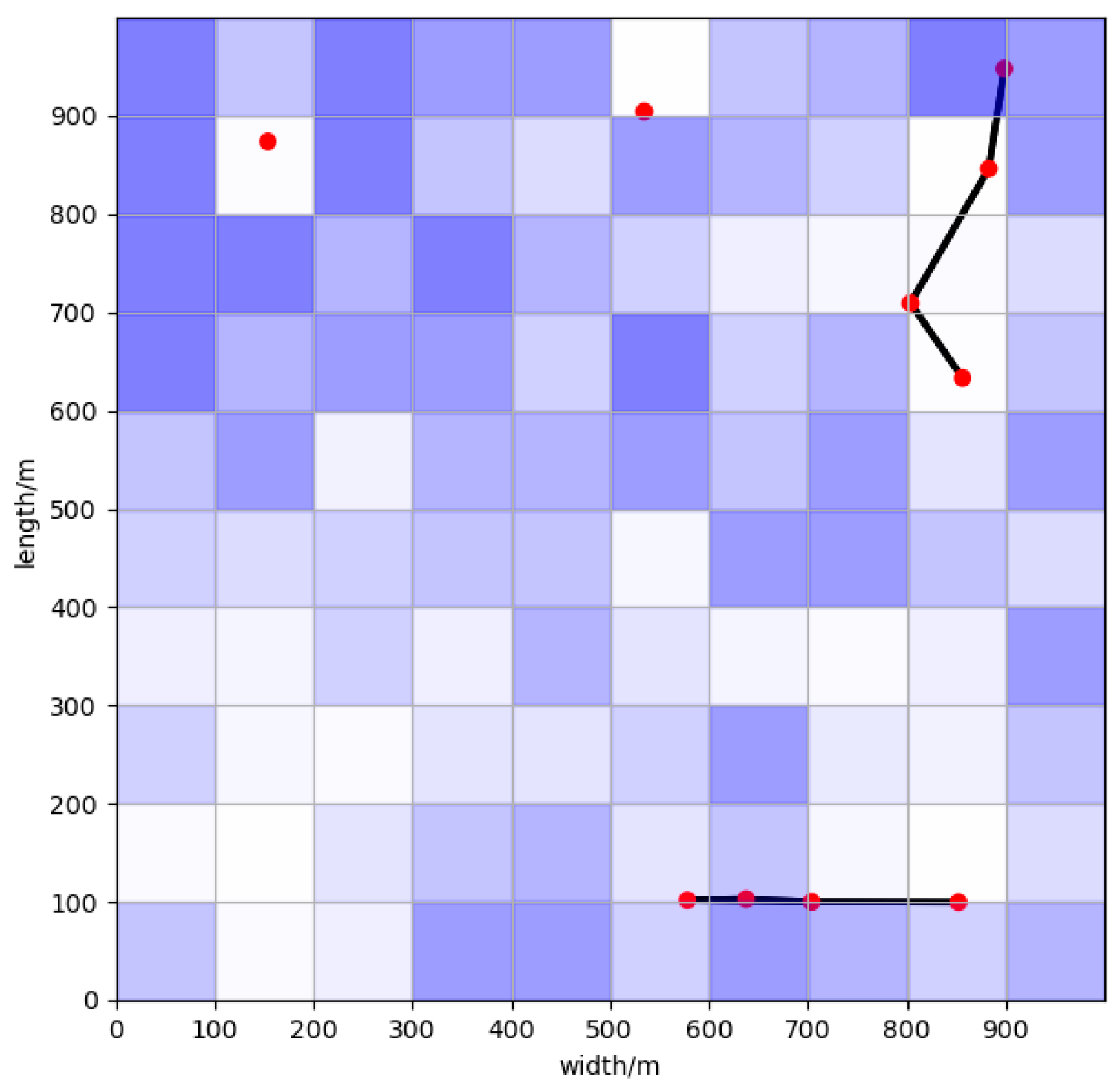
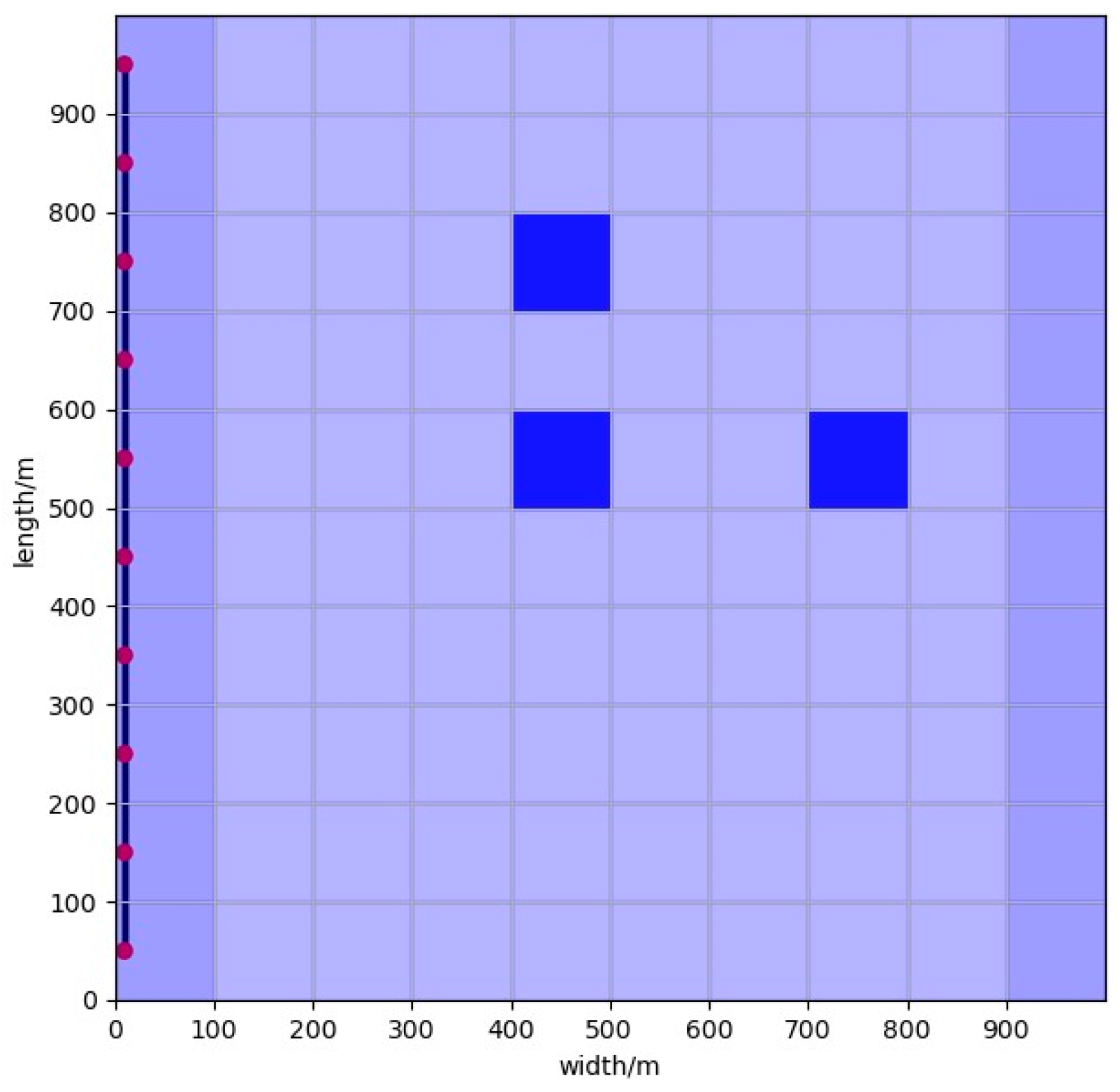
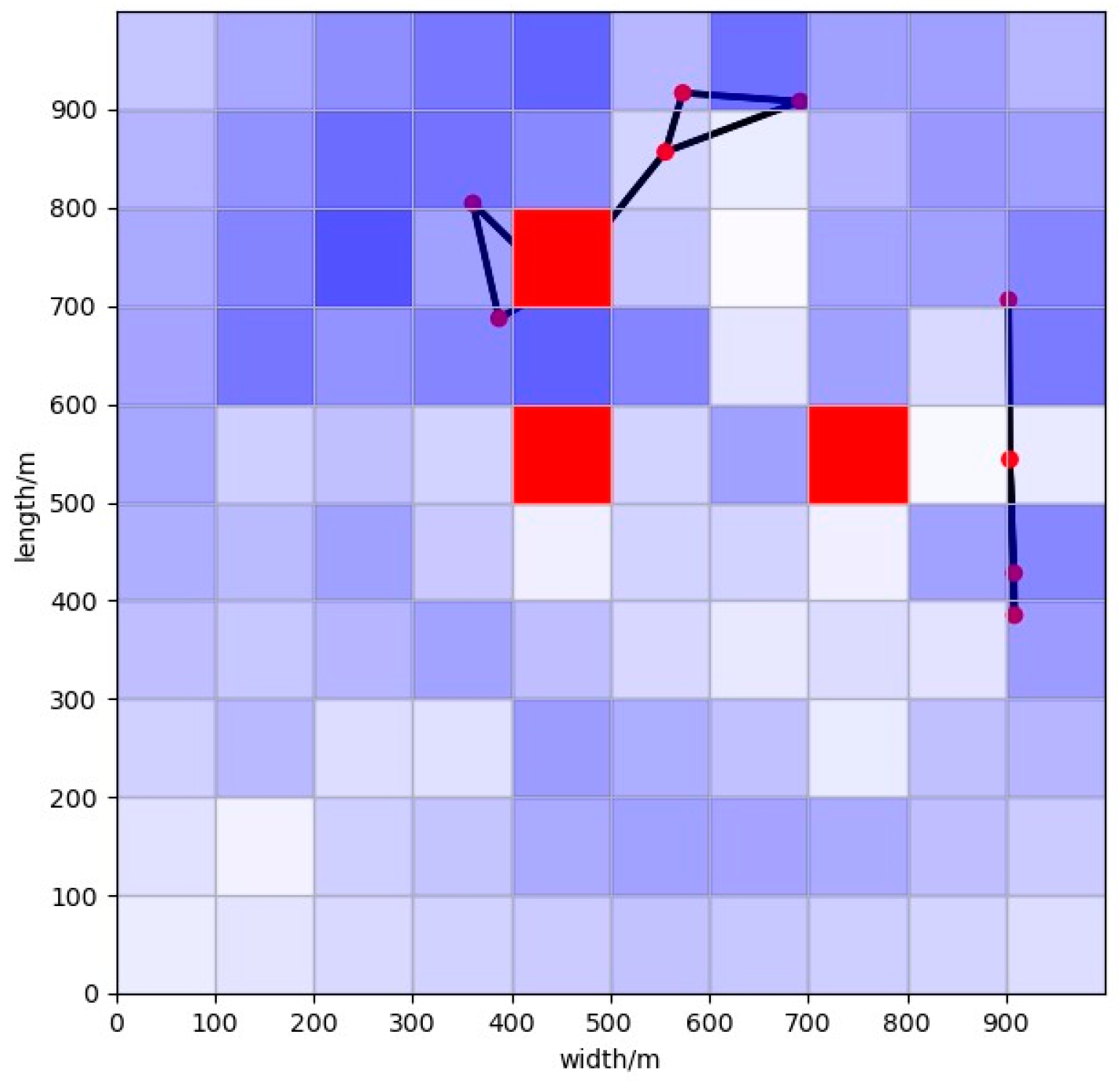
Figure 5 is set as 0.5, and it indicates that the environment is unknown to UAV swarm at the initial time. The simulation interval is
. The total simulation time cycle is 200. When the UAV and the target are in the same cell at a certain time, the target is considered to be detected by the airborne sensors. Then, the onboard computer updates the target existing probability of the corresponding grid and determines the target existence of the grid by comparison with the given threshold.
Figure 5 is the experimental scenario of the single UAV swarm at the initial time. The red points are UAV agents, and the black lines represent communication connectivity. When the distance between agents is less than the given value, communication connectivity is built. The blue color of the grid shown in
Figure 5 represents the target existing probability of each grid, and the color degree denotes that the mission area is unknown to UAV agents.
5.1. Unknown Environment with No Target
5.1.1. Cooperative Search Based on the Proposed ESUSTPM Model
According to the ESUSTPM mechanism, the agents tend to move to the grids with the highest target existing probability. If the sensor on the UAV cannot find the objects of interest, the TEP of the grid decreases. The parameters of the ESUSTPM algorithm are listed in
Table 1.
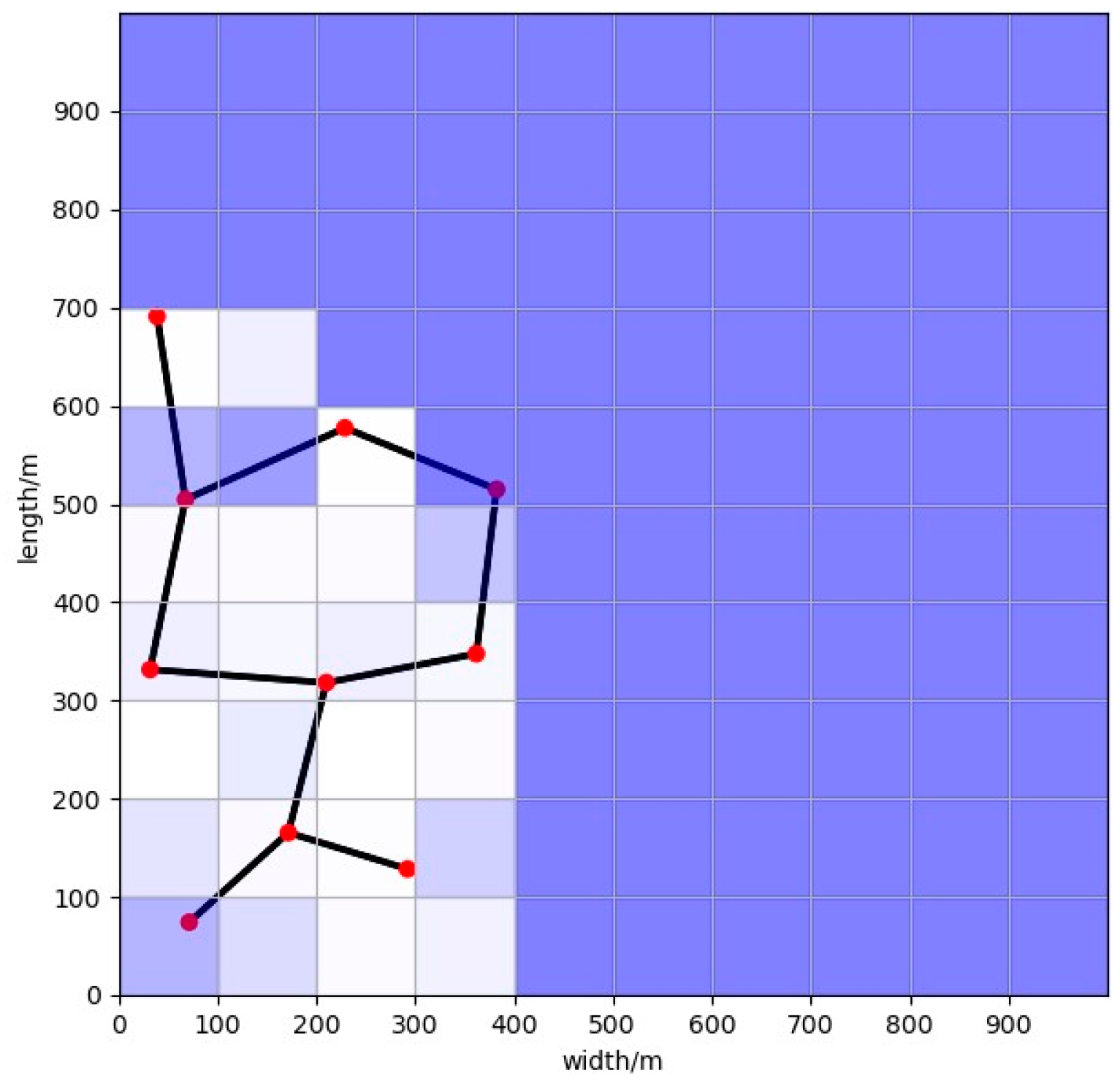
Figure 6 is the simulation result at the 200th time cycle, and the color degree of each grid represents the target existing probability. Compared to
Figure 5, the color of most grids becomes lighter in the emergent searching process. It indicates that most grids are covered, and the environmental uncertainty decreases significantly. The experimental results verify the effectiveness of the ESUSTPM algorithm in the unknown environment with no target.
5.1.2. Cooperative Search Based on the Classical Random Searching Algorithm
In the classical random searching experiment, the directions of the UAV agents are random, and the step size is constant in each cycle. In each step, the monomers can avoid collision when the distances between the agents or the distances between the agent and boundary are less than the set safe value.
In order to simulate this searching behavior, a random direction is generated by Equation (12):
where
is the dimension of the space, and it is 2 in this paper.
represents a function that produces a random number in [−1,1].
indicates the norm.
The position of the agent
is updated in Equation (13):
where
is the constant step, and it equals 10 in this paper.
is the simulation interval.
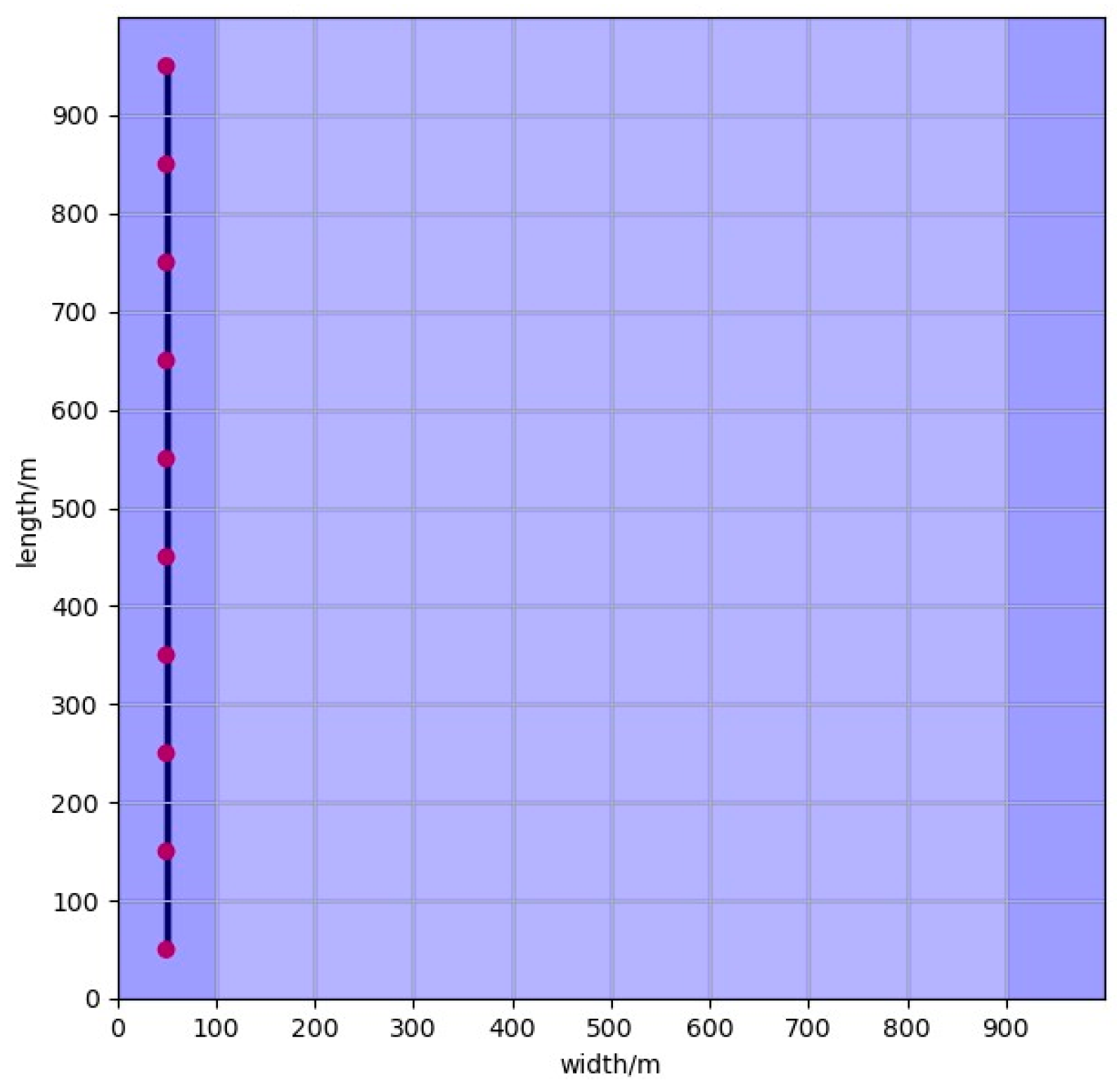
The experimental result at the 200th time cycle is shown in
Figure 7, and most grids are still blue. Compared with the proposed ESUSTPM algorithm, the cooperative searching algorithm based on the classical random algorithm cannot complete the full coverage of the mission area within 200 time cycles, and the reduction in the environmental uncertainty is also not sufficient.
5.1.3. Cooperative Search Based on the Mower Search
The mower searching algorithm is a classical searching algorithm [
33], and UAV agents sweep the mission area back and forth at a certain speed.
Figure 8 shows the mower searching result at the 200th time cycle. The color of each grid becomes lighter at the 200th time cycle, and this indicates that all grids have been visited, and the TEP decreases.
In order to simulate this searching behavior clearly, the position of the UAV agent
is updated by the following Equation (14):
where
is the unit direction. This direction will reverse when the UAV meets the boundary.
is a certain step, and it equals 10 in this paper.
is the simulation interval.
5.1.4. Cooperative Search Based on the Boids Model without Guidance
The Boids model consists of three rules, including collision avoidance, velocity matching and flocking centering. Collision avoidance demonstrates that the monomer attempts to avoid collision with the nearby neighbors. Velocity matching means that each swarm monomer attempts to match the velocity with the nearby neighbors. The flock centering indicates that the agent attempts to stay close to the nearby neighbors. The monomers can realize a distributed synergy effect of UAV swarm by adopting the three principles to interact with each other. In the cooperative search based on the Boids model without guidance, the local rules only contain the above three rules for maintaining the flocking state and searching the grids. As the guiding rules are not used to guide the movement of UAV agents, the searching efficiency of this cooperative searching method will not be high in theory.
Figure 9 is the simulation result, which indicates that the searching algorithm based on the Boids model without guidance is executed after 200 time cycles. The given safe distance between the agents is 120 m. As the monomer cannot acquire the environmental guidance in the searching process and the interactions between agents further restrict and disturb the movement of the nearby monomers, the swarm can only partially cover the mission area.
5.1.5. Cooperative Search Based on the Boids Model with Guidance
The Boids principles and the proposed guiding mechanism are adopted to perform the full coverage mission. The searching time is 200 time cycles. The given safe distance between the agents is also 120 m.
Figure 10 shows the experimental result of the searching algorithm based on the Boids model with guidance. The color of the partial grids is still blue, and this indicates that these grids are not visited within 200 time cycles. It proves that the efficiency of the searching algorithm based on the Boids model with guidance is lower than the proposed ESUSTPM algorithm in this paper.
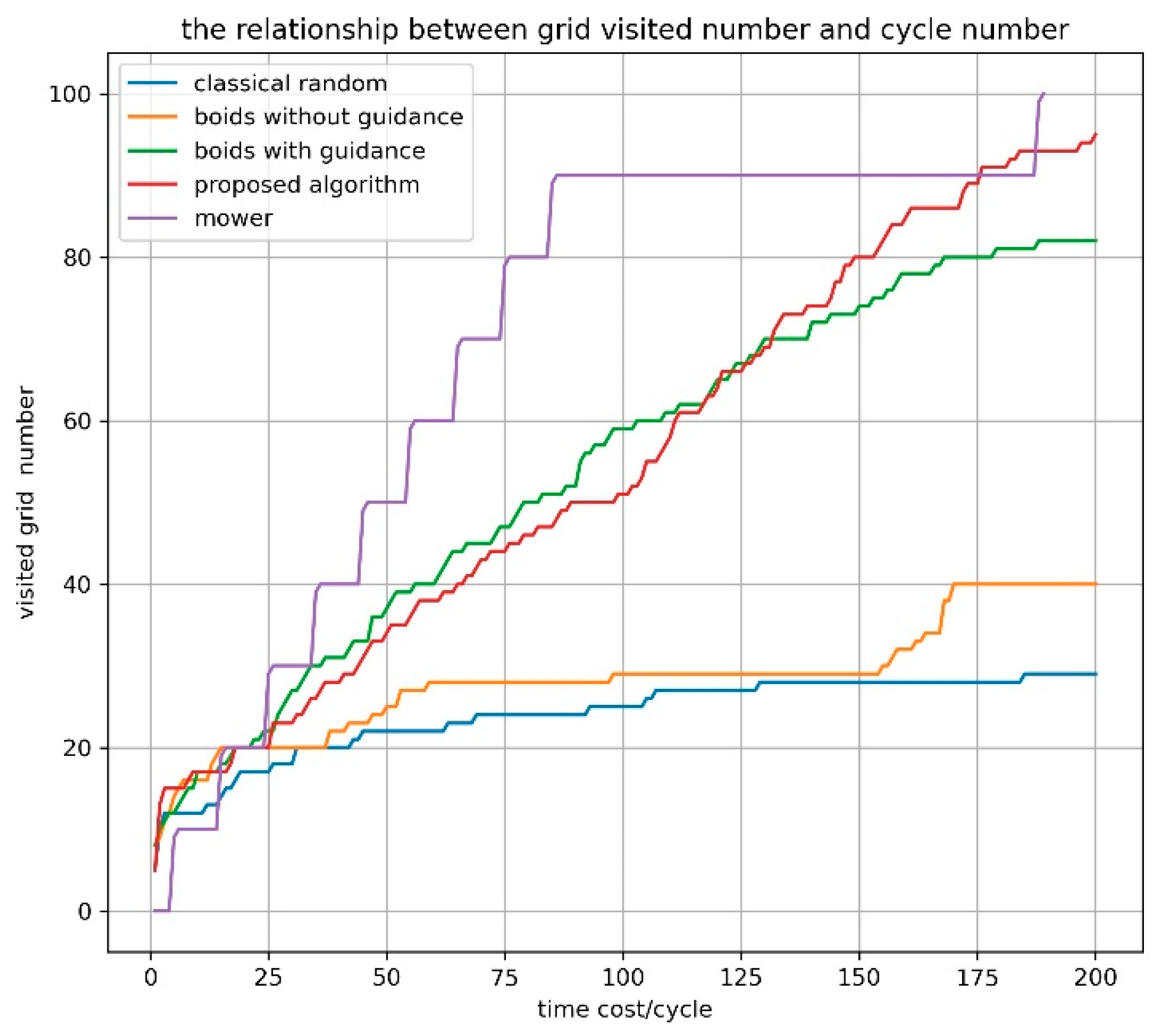
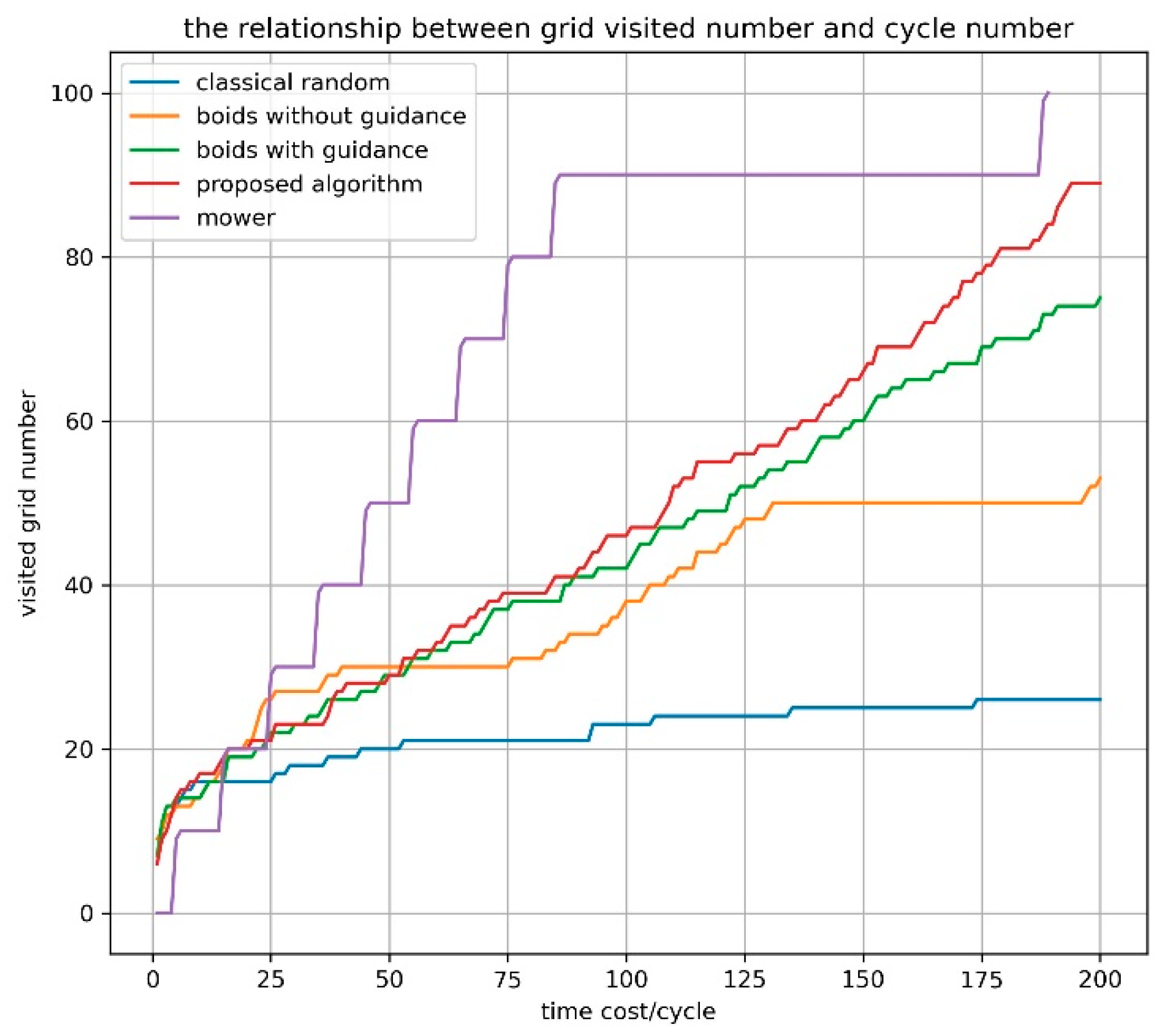
Figure 11 shows the relationship between the grids visited number and time cycles of the five searching algorithms. The red line, purple line, green line, orange line and the indigo line represent the proposed ESUSTPM algorithm, the mower searching algorithm, the searching algorithm based on the Boids model with guidance, the searching algorithm based on the Boids model without guidance, the classical random searching algorithm, respectively. It shows that the completion time of the proposed searching algorithm is almost equal to the mower searching algorithm, but the other searching algorithms cannot achieve the area coverage search within the given time. Generally, the mower searching algorithm has the highest coverage efficiency. Therefore, the conclusion is drawn that the ESUSTPM algorithm is efficient.
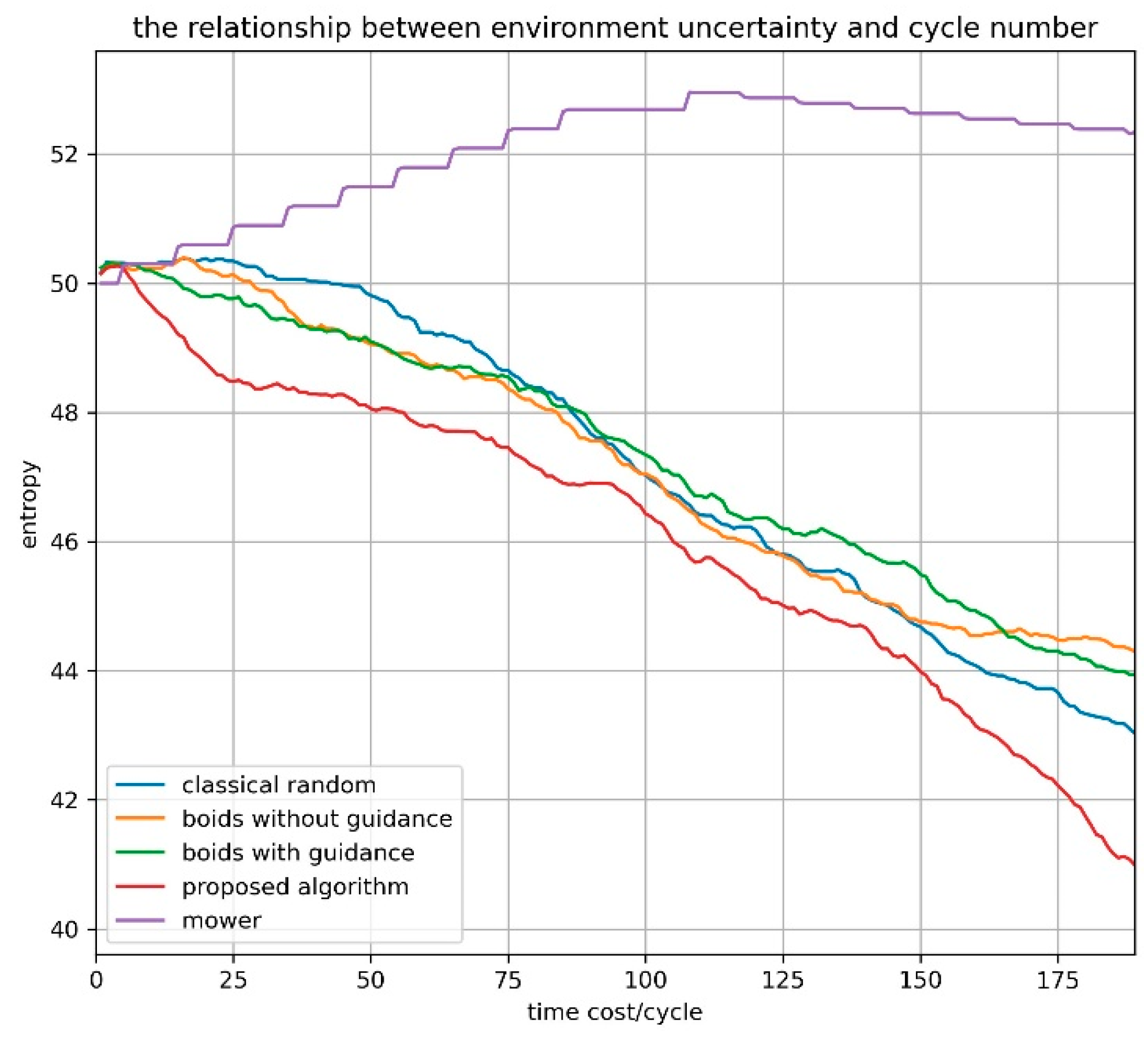
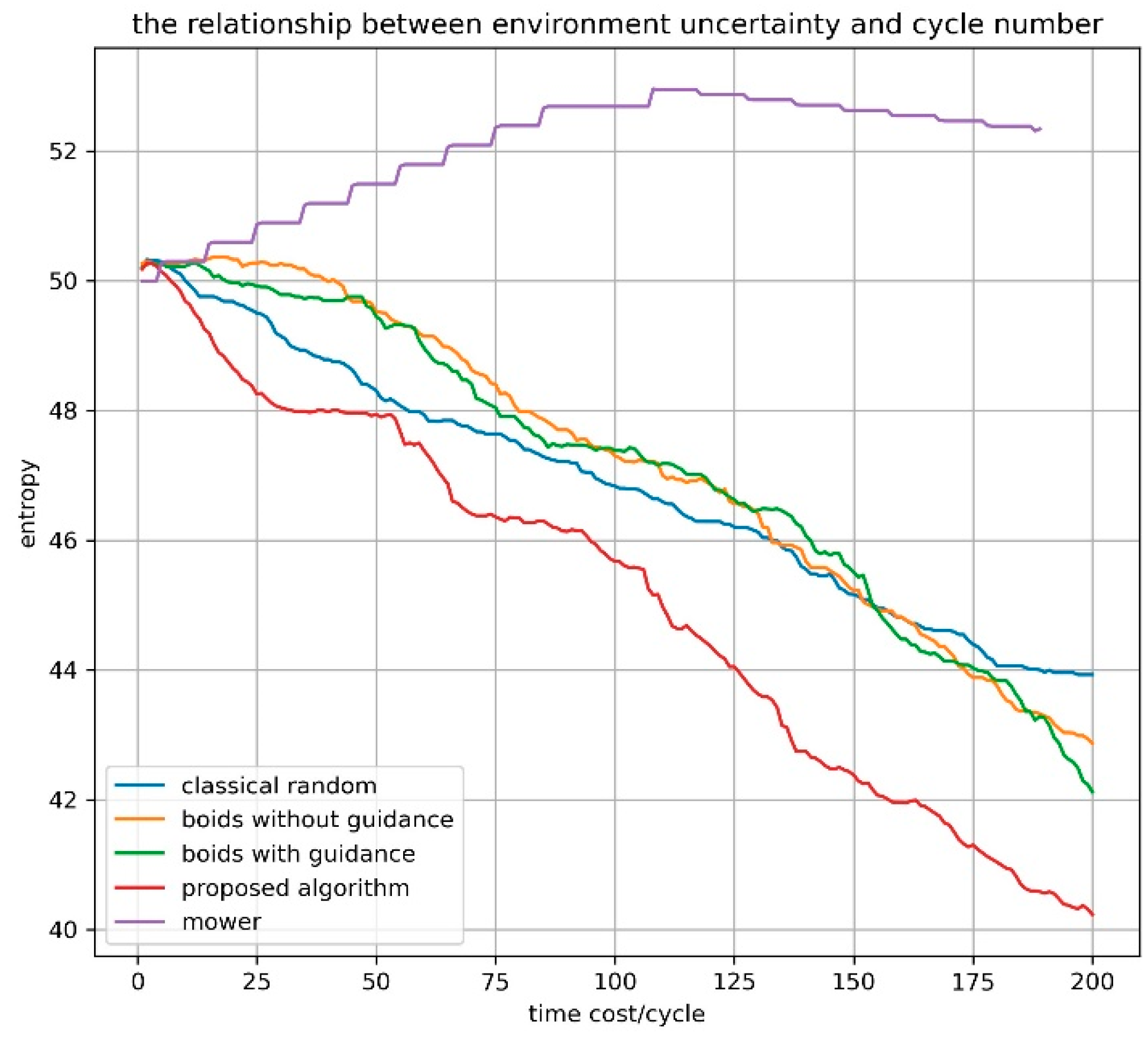
Figure 12 shows the change of the environmental uncertainty derived by the five searching algorithms during 200 time cycles. The purple line represents the result of the mower searching algorithm, and the red line is the result of the proposed ESUSTPM algorithm. During the stipulated experiment time, the environmental uncertainty of the proposed ESUSTPM algorithm decreases more than with the other searching algorithms.
In all, combining the results of
Figure 11 and
Figure 12, the proposed method is most effective in terms of area coverage and the reduction in environmental uncertainty at the same time.
5.2. Unknown Environment with Static Target
In the unknown searching scenario with some targets, the coordinates of three targets are (400, 500), (400, 700) and (700, 500). The initial positions of UAV agents are distributed in the lower left corner. At the initial time, the UAV swarm does not know whether there is a target in the mission area. Therefore, the initial target probabilities of all grids are set as 0.5, and the color of each grid is blue in
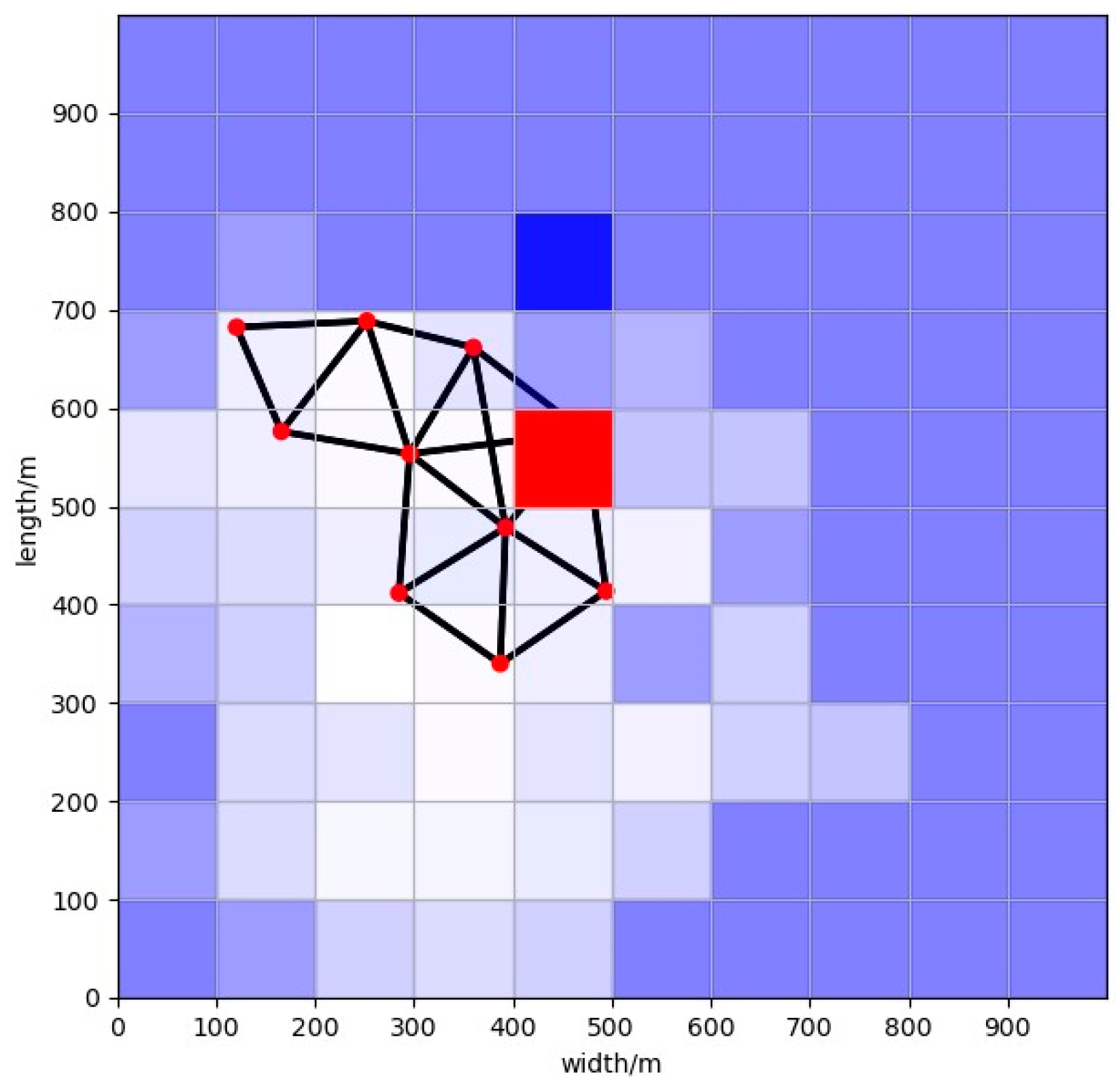
Figure 5. In ESUSTPM, the UAV agent visits the nearby grid with the highest target probability. If the airborne sensors cannot detect the targets in the visited grid, the target existing probability decreases, and the color of the grid becomes lighter. Conversely, the target existing probability increases when the target is detected by the airborne sensors in the corresponding grid. Meanwhile, the blue color of the grid becomes deeper. When the probability value in a grid is higher than the given value, the onboard computer confirms that the target exists in this grid, and the corresponding color becomes red. The simulation cycles are also 200 time cycles in this experiment.
5.2.1. Cooperative Target Search Based on the Proposed ESUSTPM Model
In target searching mission, the parameters of the local rules in ESUSTPM are the same as the parameters in
Table 1. Within the 200 time cycles, the number of the red grids increases from
Figure 13,
Figure 14 and
Figure 15, and the color of the other grids also becomes lighter, as shown in
Figure 15. This experimental result proves that the proposed ESUSTPM algorithm is feasible, and ESUSTPM can not only find the targets but also cover 94% of the area.
5.2.2. Cooperative Target Search Based on the Classical Random Searching Algorithm
Figure 16 shows the result of the target search based on the classical random searching algorithm. Within 200 time cycles, the searching method based on the classical random searching algorithm cannot cover most of the grids and find a target. The result shows that this algorithm is not suitable for the cooperative target search.
5.2.3. Cooperative Target Search Based on the Mower Searching Algorithm
The cooperative search based on the mower searching algorithm is executed during the 200 time cycles.
Figure 17 is the corresponding result at the final cycle. As the target existing probability of each grid is less than the given value, no target is found within the specified time cycles, and the environmental uncertainty of all grids does not drop too much.
5.2.4. Cooperative Target Search Based on the Boids Model without Guidance
The target searching algorithm based on the Boids model without guidance is executed, and the results in
Figure 18 show that one target is found, and most grids are not covered within 200 time cycles. The experimental result indicates that the algorithm based on the Boids model without guidance is not suitable to conduct the target searching mission.
5.2.5. Cooperative Target Search Based on the Boids Model with Guidance
The target searching algorithm based on the Boids model with guidance is executed. The result in
Figure 19 shows that two targets are found, and nearly half of the grids are covered within the given time cycles. The experimental result indicates that the Boids model guided by the TEP information can be adopted to conduct the searching mission, but the searching effect is slightly inferior to the proposed ESUSTPM algorithm in this paper.
Figure 20 shows the relationship between the grid visited number and time cycles. The red line, purple line, green line, orange line and indigo line represent the proposed searching algorithm, the mower searching algorithm, the searching algorithm based on the Boids model with guidance, the searching algorithm based on the Boids model without guidance, the classical random searching algorithm, respectively. The grid numbers covered by the mower searching algorithm and the proposed searching algorithm are close within the specified time cycles. However, the other searching algorithms cannot cover most of the grids in the specified time cycles.
Figure 21 shows the change of the environmental uncertainty derived by the five target searching algorithms within 200 time cycles. The purple line represents the result of the mower searching algorithm. The red line is the result of the proposed ESUSTPM algorithm. Within the given simulation time, the environmental uncertainty obtained by the proposed searching algorithm decreases more than with the other searching algorithms.
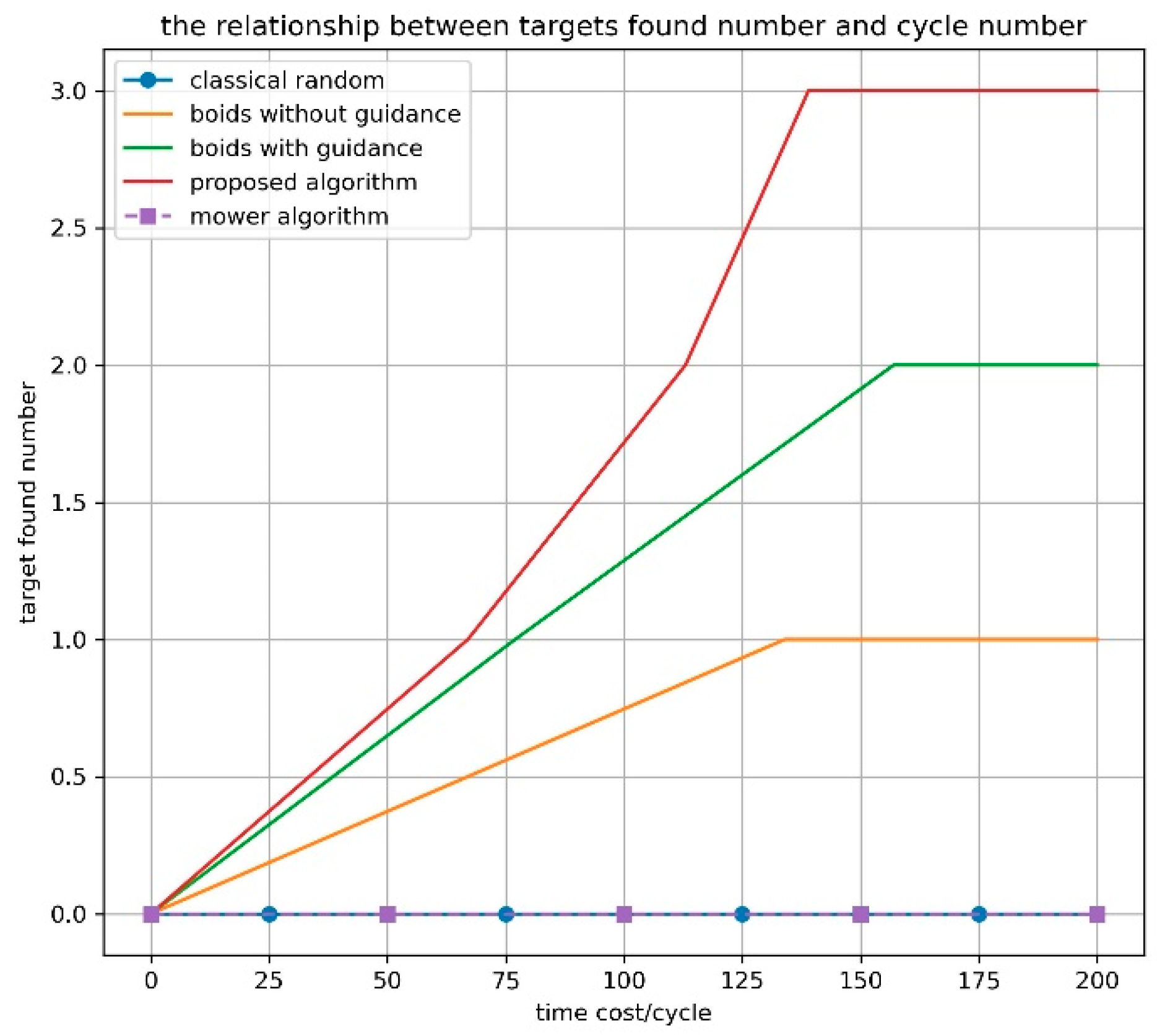
Figure 22 is the relationship between the number of targets found and time cycles. Within the 200 time cycle, only the proposed ESUSTPM algorithm can find all targets. The results verify that the efficiency of the proposed ESUSTPM is higher than the other searching algorithms.
5.3. Environment with Partial Prior Information of Static Targets
Three targets are assumed to exist at (400, 500), (400, 700) and (700, 500). Therefore, the initial distribution of the target existing probability density in the mission area is shown in
Figure 23 according to Equation (2).
5.3.1. The Mission Area with Accurate Prior Information
As the initial target existing probability map is known before executing the target search, UAV swarm based on the ESUSTPM algorithm tends to move to the area with the high probability information for detecting targets.
Figure 24 shows that all targets are found, and the environmental uncertainty is also reduced after 200 time cycles.
Figure 25 shows that the ESUSTPM algorithm without prior information takes more time to find three targets than ESUSTPM with prior information. The results prove that prior information is helpful to improve the searching efficiency.
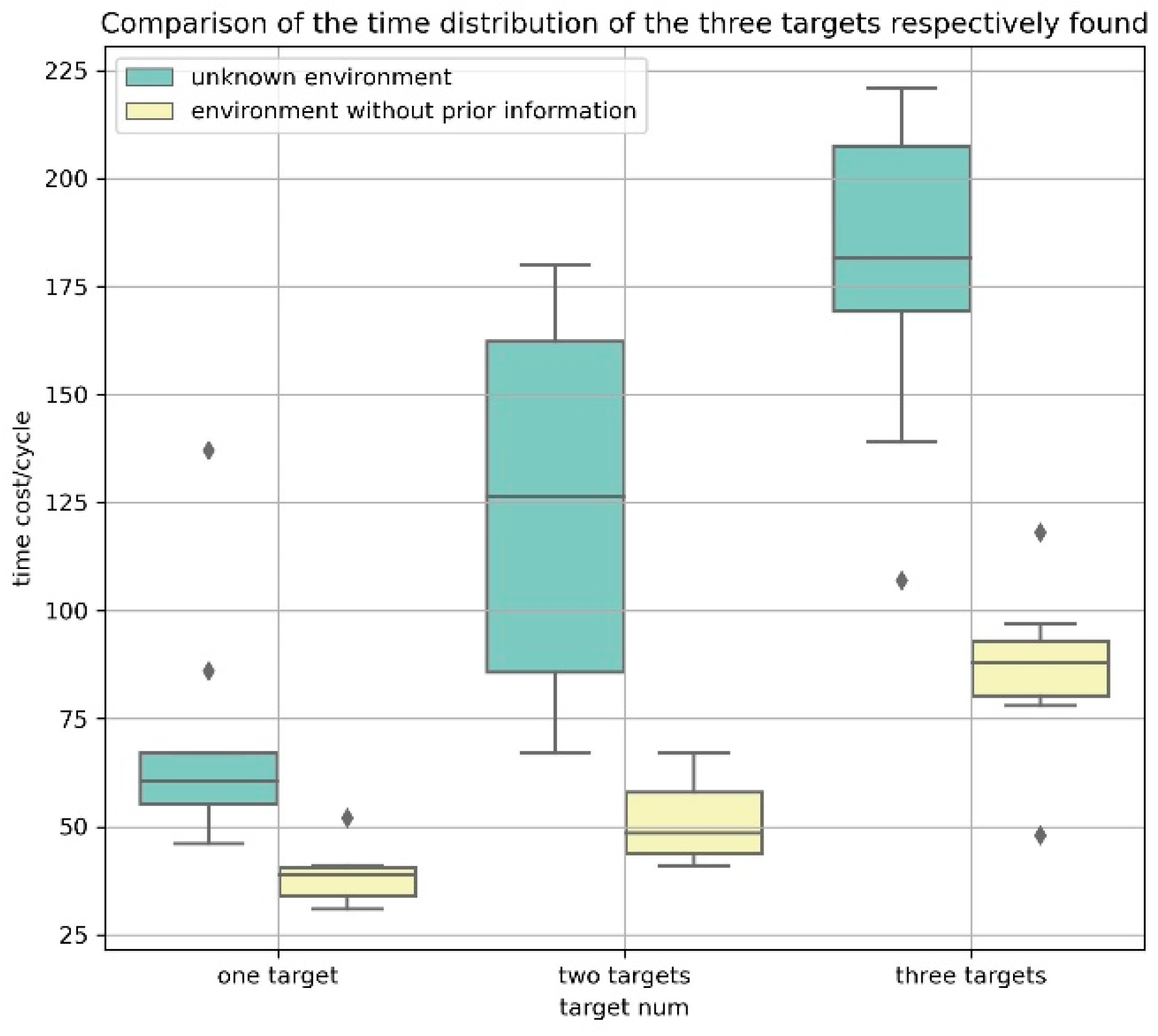
Figure 26 is the distribution of the statistical time cycles to find three targets. The yellow boxplots are the target searching cycle distribution of UAV swarm in the environment with prior information, and the green boxplots are the target searching cycle distribution of UAV swarm in the unknown environment without prior information. The results indicate that accurate prior information can improve the searching efficiency.
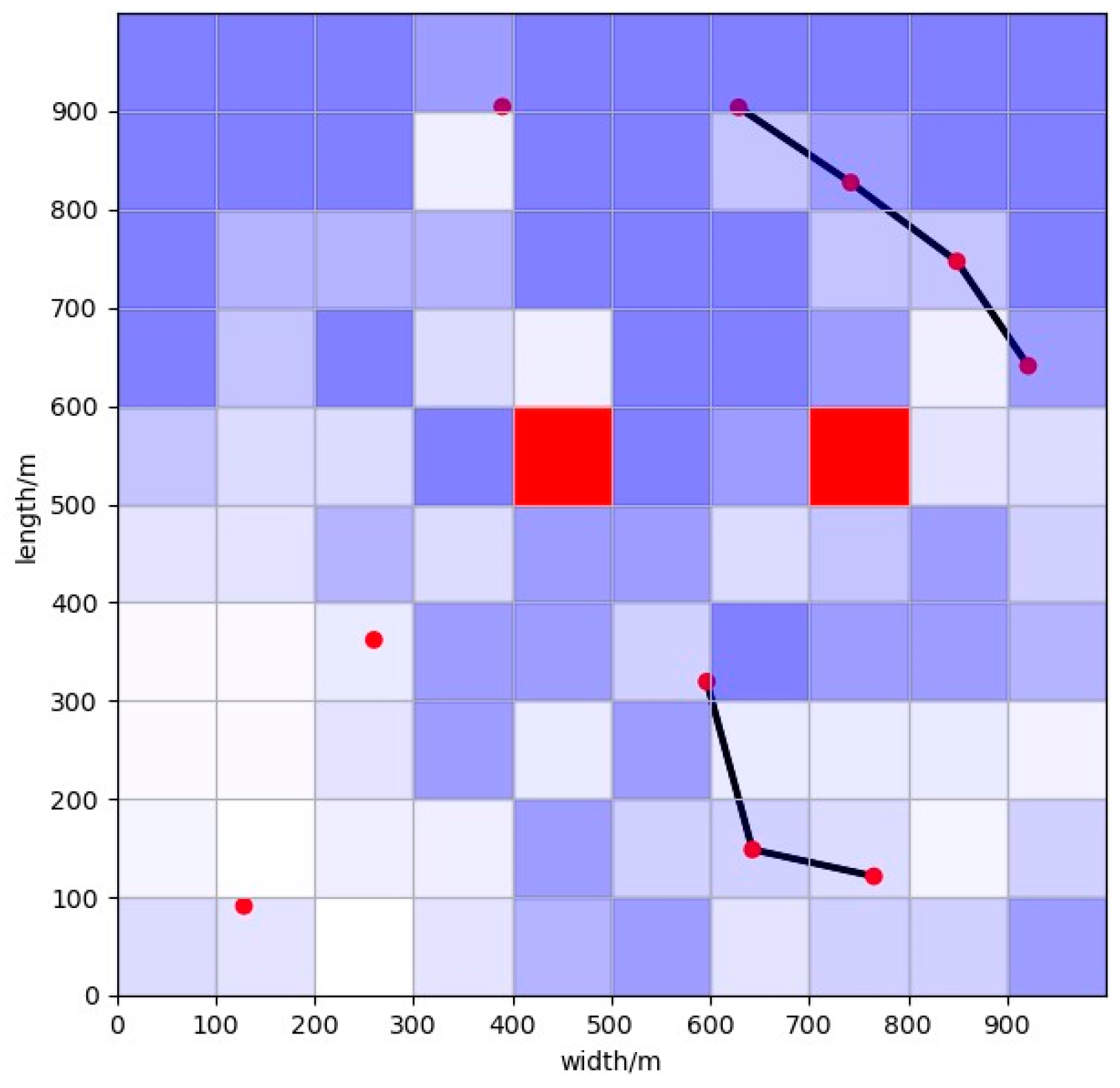
5.3.2. The Mission Area with Inaccurate Prior Information
According to prior information, three targets may be distributed in the area with high probability, as shown in
Figure 23. The target coordinates actually exist in (400, 500), (400, 700), but the target in (700, 500) is not true. Prior information is not accurate enough, but the UAV swarm cannot know this situation at the initial time.
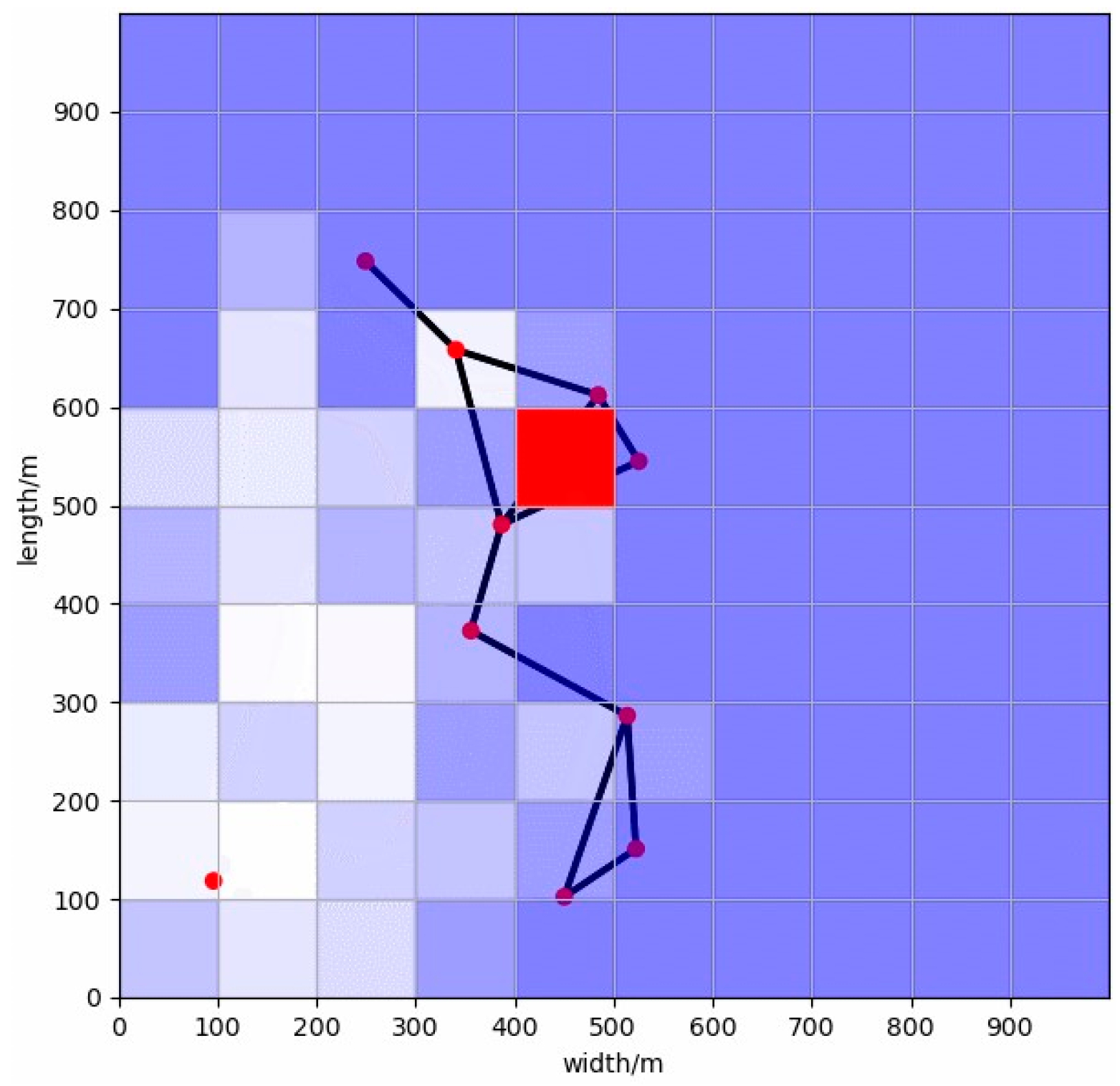
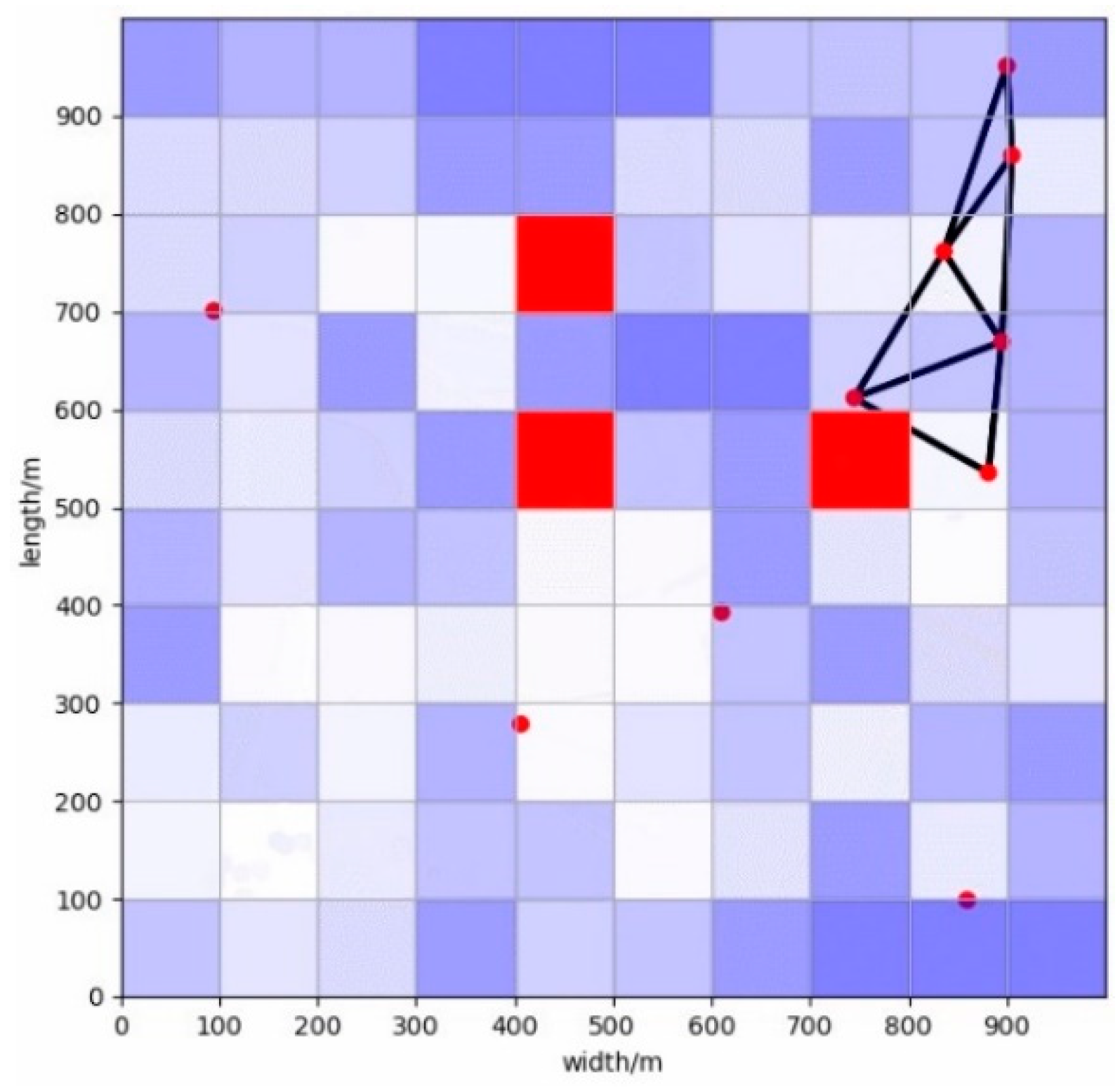
Figure 27a shows the corresponding results of the proposed ESUSTPM algorithm. The red grids indicate that the targets in (400, 500) and (400, 700) are found. Concurrently, the color of the grid in (700, 500) becomes white in the emergent searching process, and the algorithm identifies that the target does not exist in this grid.
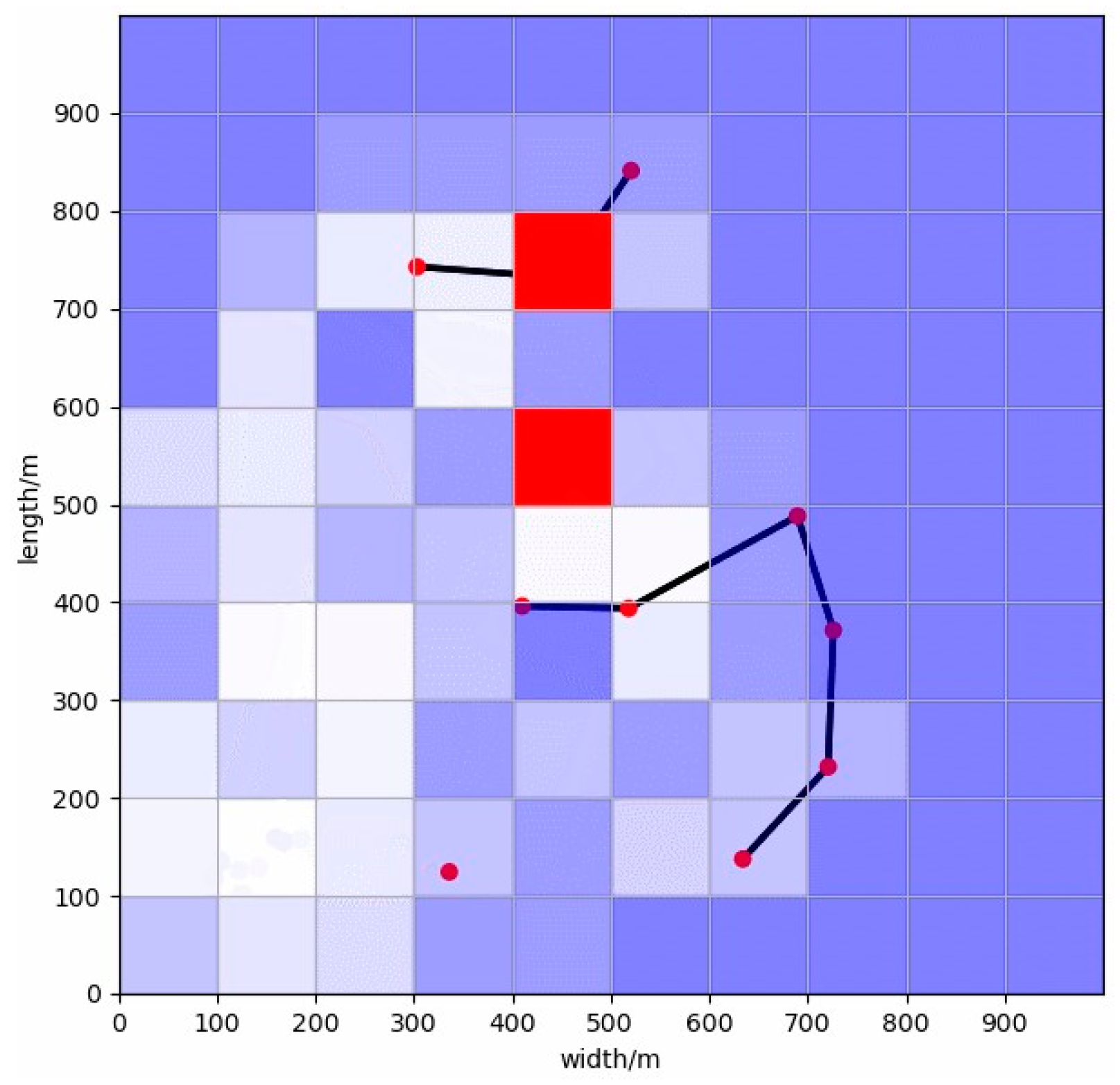
In
Figure 27b, the color of grid (300, 200) becomes red in the emergent searching process, but the color of grids (400, 500), (400, 700), (700, 500) becomes lighter. The target is considered unlikely to exist in the grid (300, 200), but the target is detected and does exist in this grid.
The results in
Figure 27 indicate that the proposed ESUSTPM algorithm can discover the hidden targets, and it has fault tolerance to wrong prior information.
For intuitively displaying the pros and cons of the above searching methods,
Table 2 lists the comparative results of three metrics, including the visited grid number, environmental uncertainty and target found number at the 200th cycle. The results in
Table 2 indicate that the proposed algorithm can minimize the environmental uncertainty within the 200 time cycles. Furthermore, the efficiency of the proposed algorithm is also the highest among these searching methods within 200 time cycles.
5.4. Statistical Analysis and Summary
To verify the robustness of the proposed ESUSTPM algorithm, five simulations with different indices, including the time cost of full coverage, environmental uncertainty and time cost of target search, are executed 10 times.
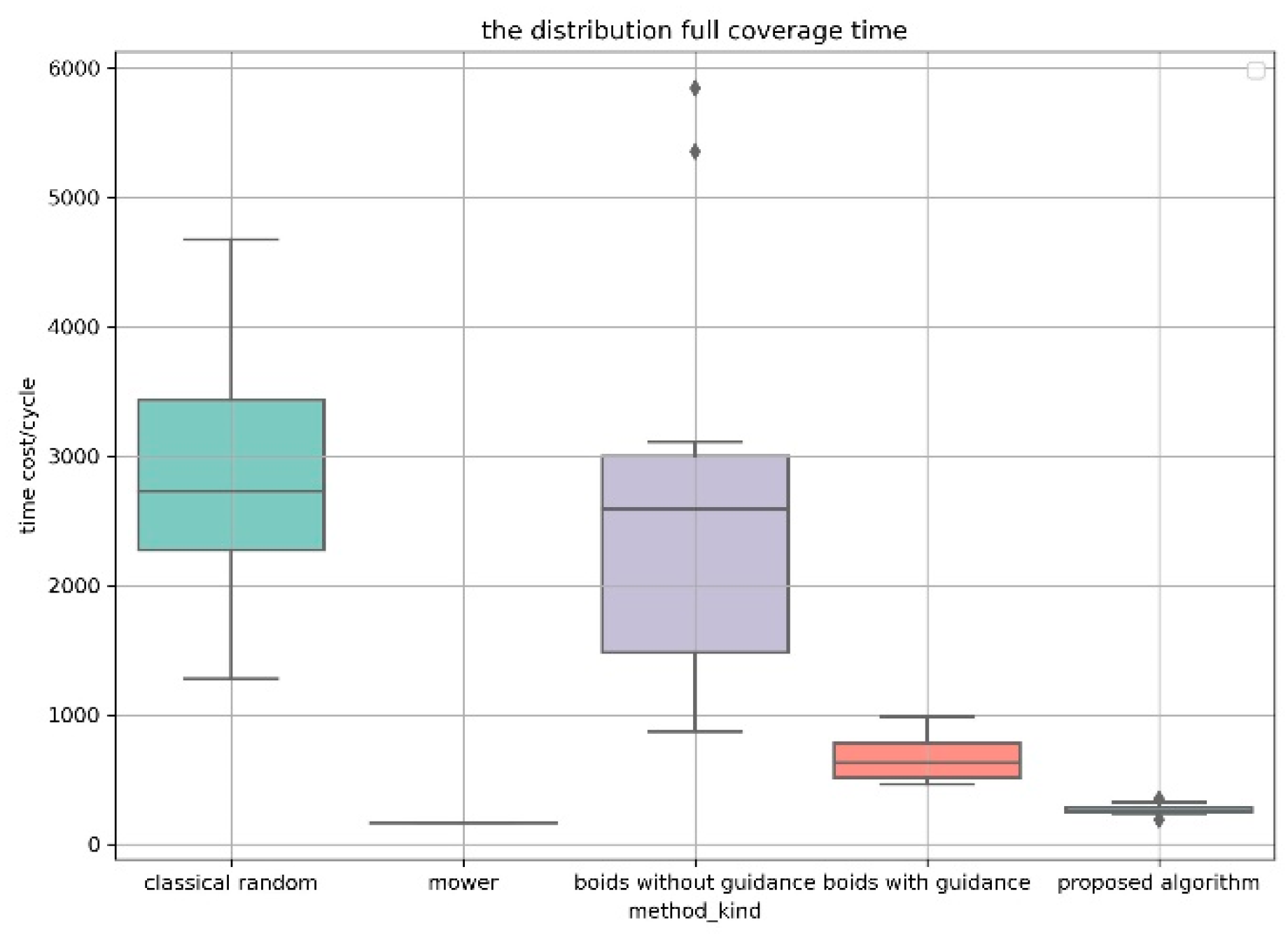
Figure 28 is the full coverage time distribution of the five searching methods. The boxplots show the simulation time cycle distribution of the full area coverage based on the classical random algorithm, the mower searching algorithm, the searching algorithm based on the Boids model without guidance, the searching algorithm based on the Boids model with guidance and the proposed ESUSTPM algorithm, from the left to the right side. The statistical results verify that the searching algorithms with a guidance mechanism are better than the algorithms without guidance. The time consumption of the proposed ESUSTPM algorithm is very close to the mower searching algorithm, and the time distribution of the proposed ESUSTPM algorithm is relatively concentrated. The results shown in
Figure 28 prove that the proposed ESUSTPM method has a good efficiency in the searching mission of the area coverage.
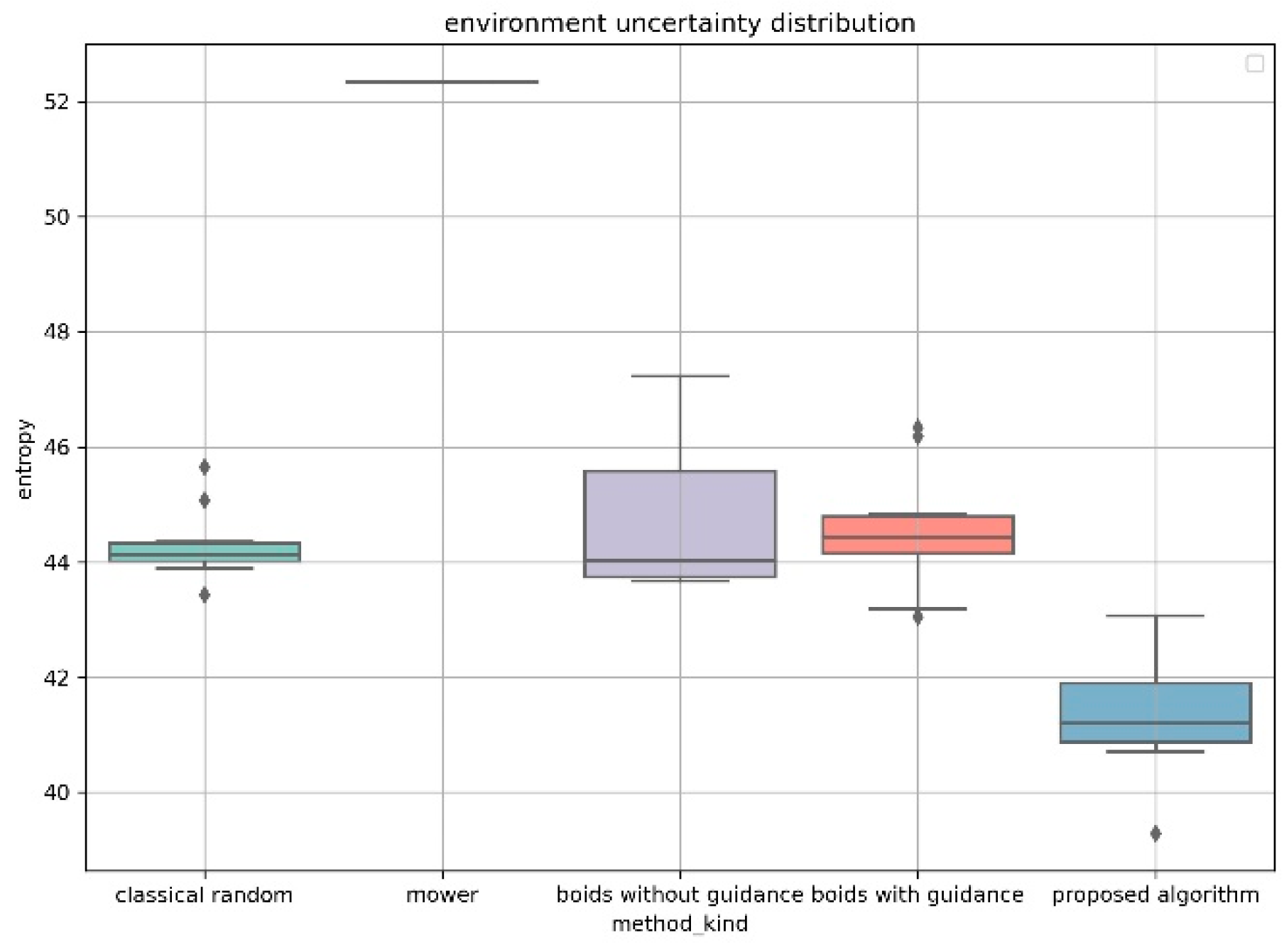
The boxplots in
Figure 29 are the distributions of the environmental uncertainty in the area coverage searching scenario at 200 time cycles. The median value of the proposed ESUSTPM algorithm is the lowest, and the environment uncertainty distribution is concentrated. This indicates the effectiveness of the proposed ESUSTPM algorithm in the index of environmental uncertainty.
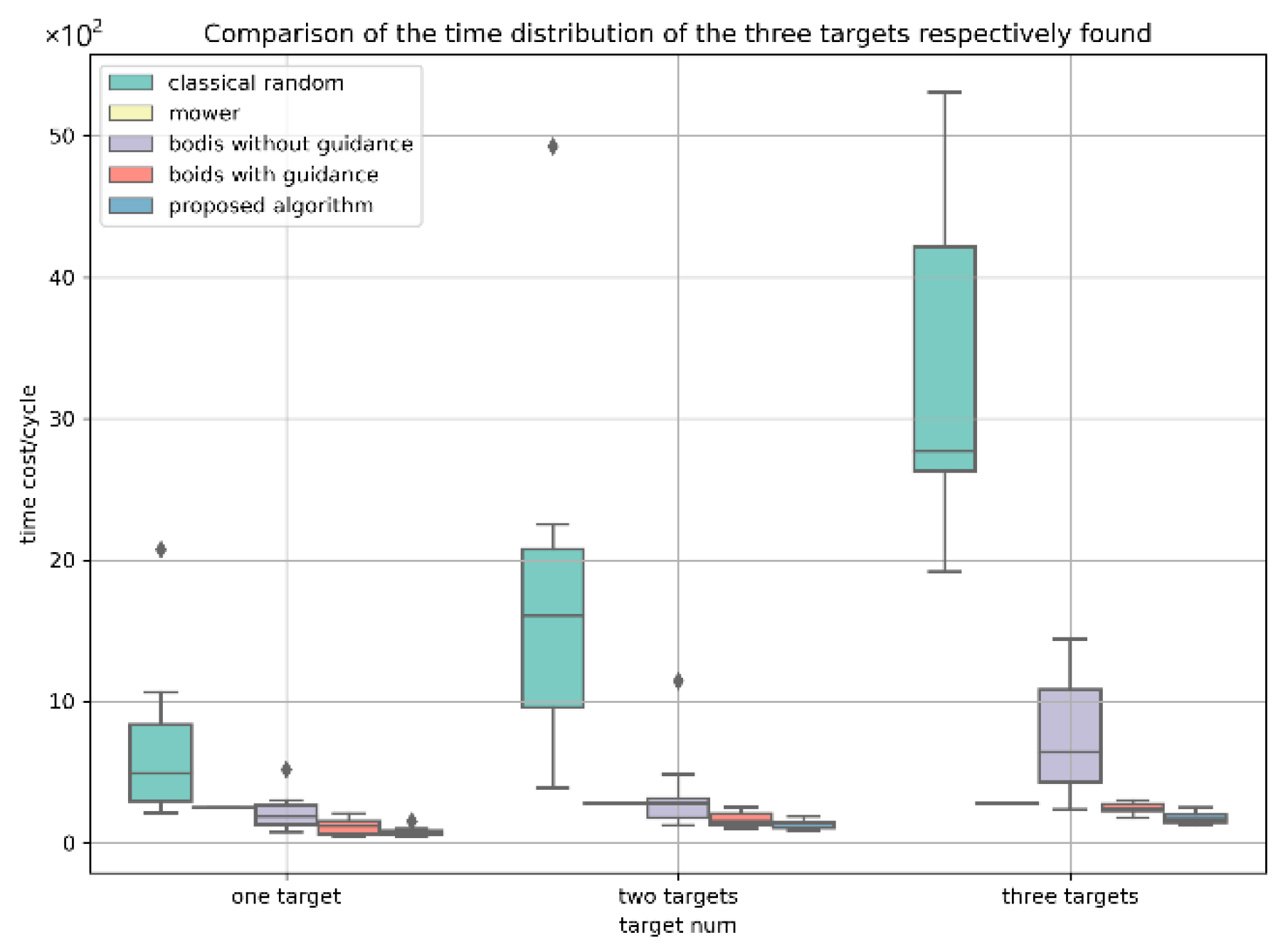
Figure 30 shows the statistical results of the time cycles distribution from one found target to three found targets. The classical random searching algorithm and the searching algorithm based on the Boids model without guidance need to spend more time searching three targets. Among the five searching algorithms, the proposed ESUSTPM algorithm is the most efficient in finding each target in the searching process.
The above statistical results show that the proposed algorithm is more efficient in the reduction of environmental uncertainty and target search mission. In addition, the proposed ESUSTPM algorithm is robust to the accurate degree of prior information. In all, the proposed ESUSTPM algorithm is suitable to be applied in a cooperative searching scenario of the UAV swarm.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}