
Damage Detection of Insulators in Catenary Based on Deep Learning and Zernike Moment Algorithms


Abstract
:1. Introduction
- The traditional non-deep learning feature-extraction algorithm is prone to misjudge under the influence of complex environment and image brightness differences, and its reliability is not strong;
- The insulator damage-detection method completely based on deep learning needs to rely on a large number of damaged insulator samples, which has high requirements for the scope and workload of image acquisition;
- The features extracted by some characteristic moment algorithms based on insulator contours are not detailed enough, and there is still room for improvement in accuracy.
2. Insulator Identification and Location Based on Mask R-CNN
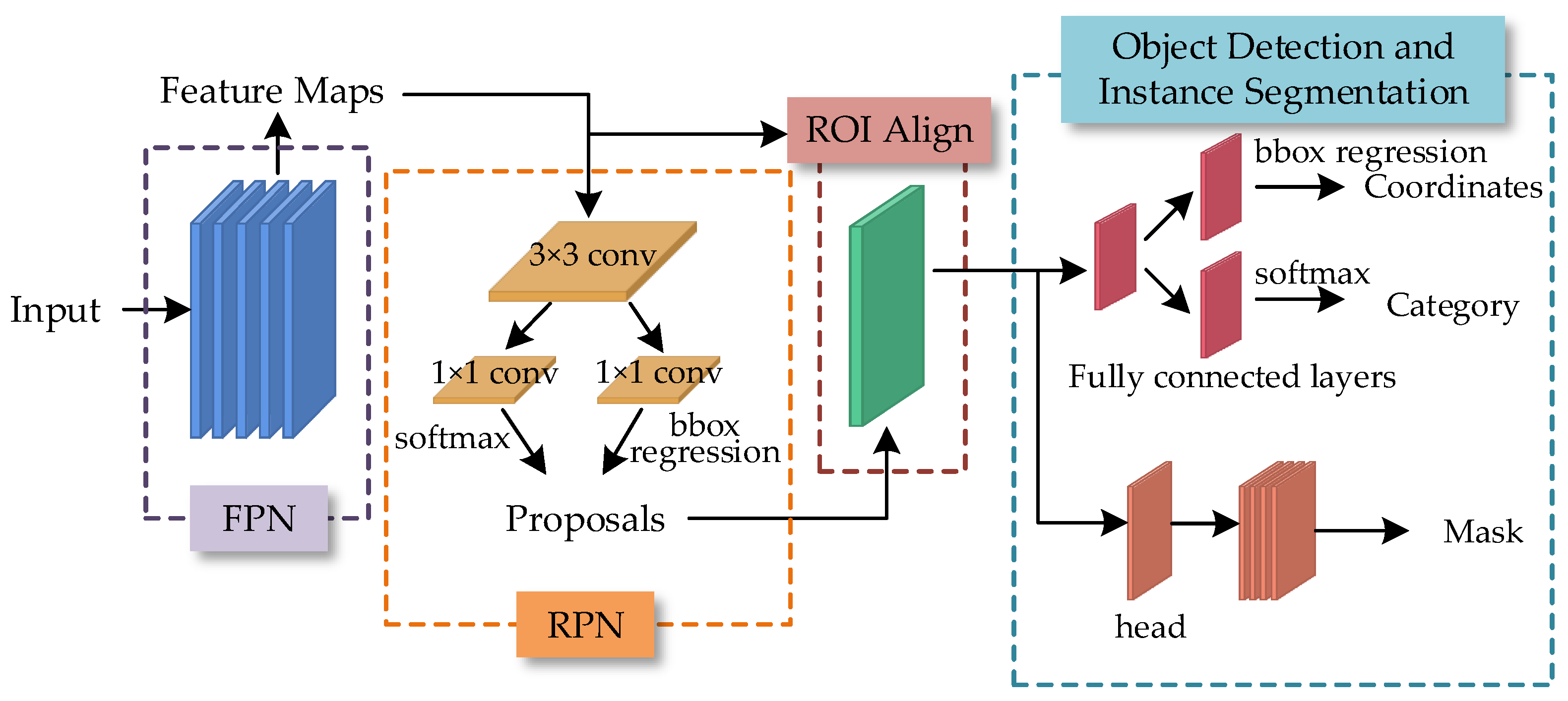
2.1. Network Structure
2.2. Model Output
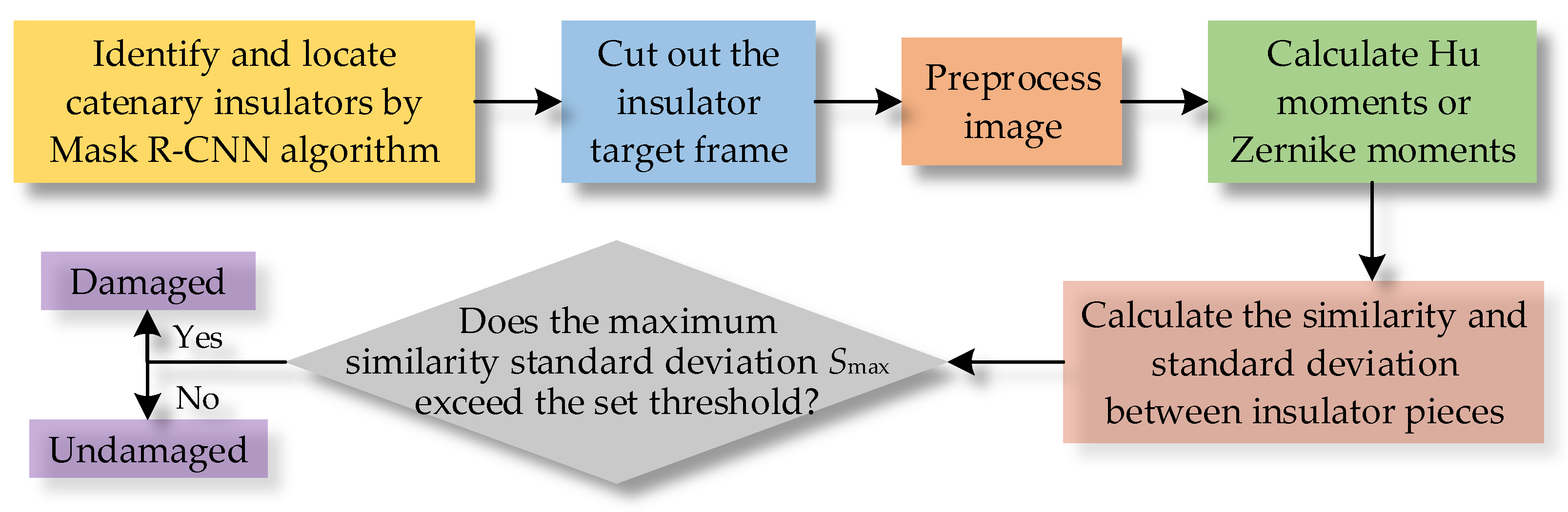
3. Insulator Damage Detection Based on Zernike Moment
3.1. Image Preprocessing
3.2. Hu Moment and Zernike Moment
3.2.1. Hu Moment
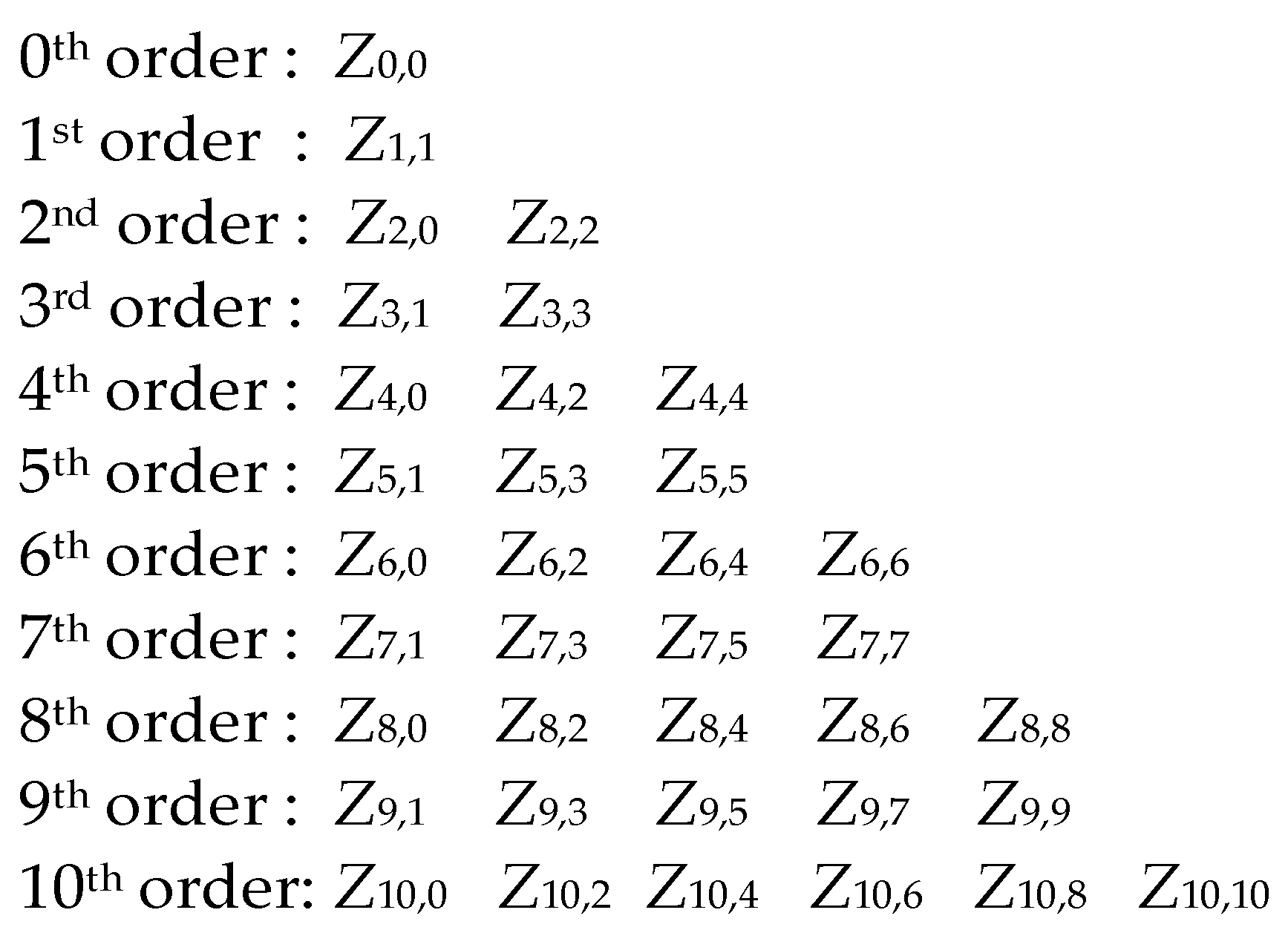
3.2.2. Zernike Moment
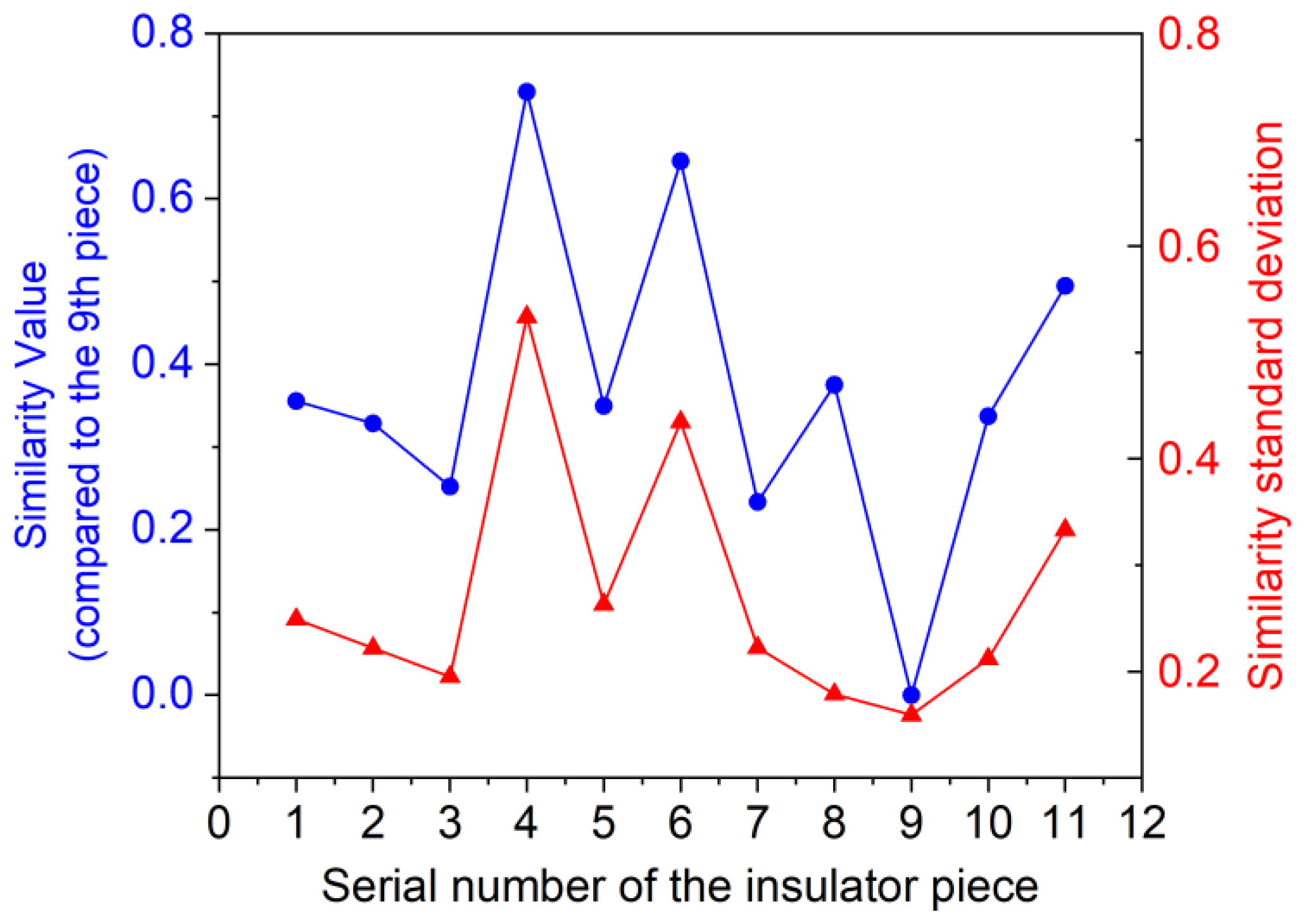
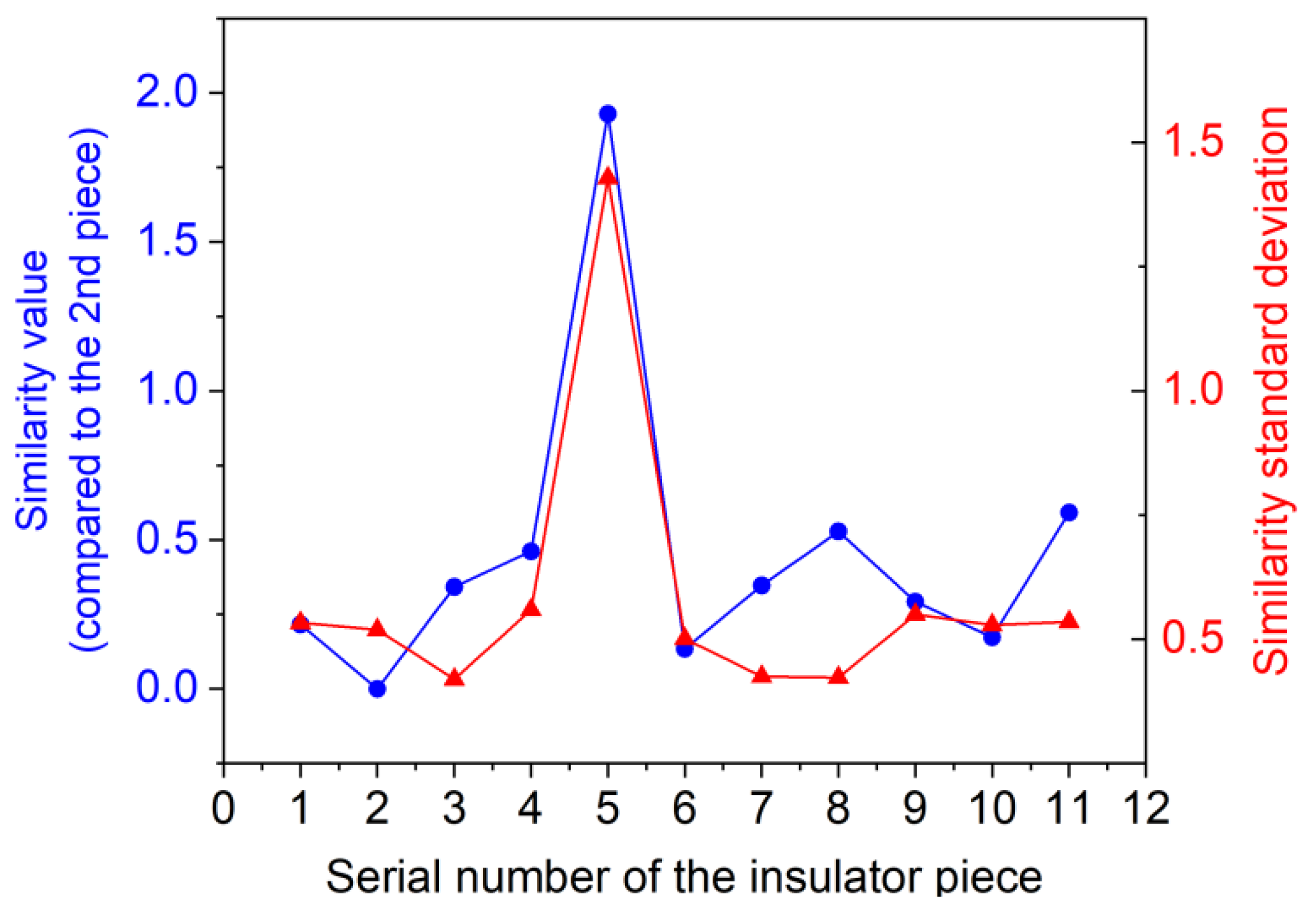
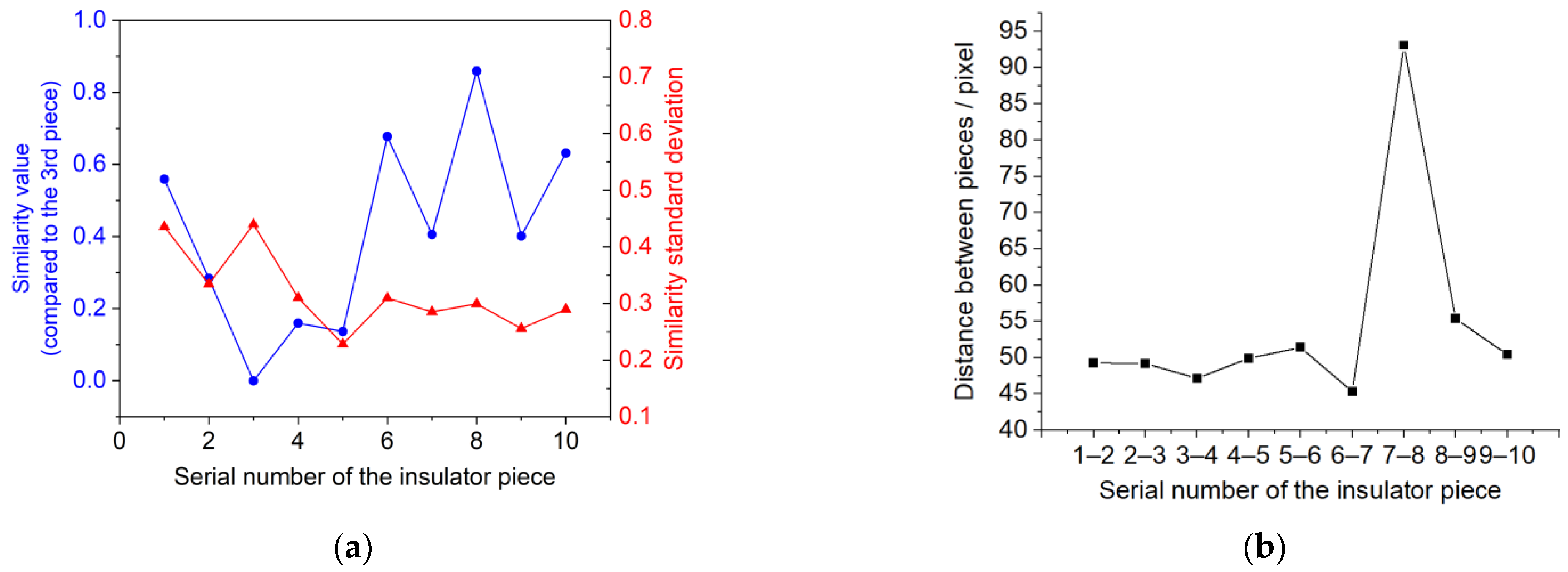
3.3. Calculation of Similarity Value and Similarity Standard Deviation
4. Experimental Testing and Analysis
4.1. Identification and Location of Insulators
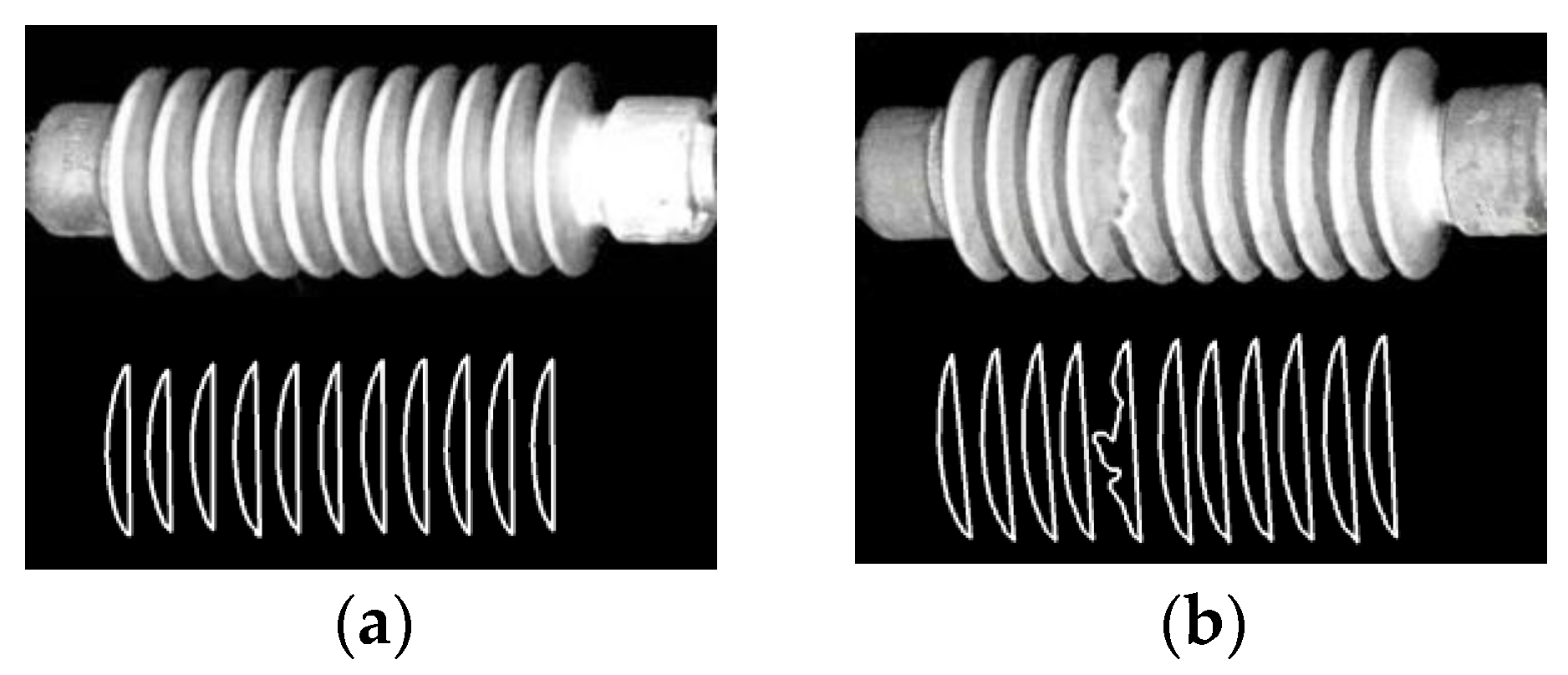
4.2. Damage Detection of Insulators
5. Conclusions
- The insulator identification and positioning algorithm based on Mask R-CNN has an accuracy of 96.4% in application, which can meet the accuracy requirements of catenary insulator identification.
- Compared with the Hu moment, the catenary insulator damage detection method based on Zernike moment has better detailed description performance, and the accuracy of insulator damage judgment is increased by 10.94%.
- Compared with the insulator damage detection method completely based on deep learning, the method based on Zernike moment reduces the dependence on the number of damaged insulator samples; compared with the method completely based on feature matching, the influence of background interference on accuracy can be reduced to a certain extent by using deep learning to locate insulator region.
- The blurring of the obtained image due to the shaking of the track detection vehicle will affect the accuracy of the method proposed in this paper. In future research, anti-shake algorithms can be considered.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Chen, J.W.; Liu, Z.G.; Wang, H.R.; Liu, K. High-speed railway catenary components detection using the cascaded convolutional netural networks. In Proceedings of the 2017 IEEE International Conference on Image Systems and Techniques (IST), Beijing, China, 18–20 October 2017. [Google Scholar] [CrossRef]
- Gu, Z.C.; Wang, Y.G.; Xue, X.T.; Wang, S.C.; Cheng, Y.; Du, X.Y.; Dai, P. Railway insulator defection with deep convolutional neural networks. In Proceedings of the 12th International Conference on Digital Image Processing (ICDIP), Osaka, Japan, 19–22 May 2020. [Google Scholar] [CrossRef]
- Yang, B.H.; Li, Y.L.; Wang, B. An improved CenterNet model for insulator defect detection using aerial imagery. Sensors 2022, 22, 2850. [Google Scholar] [CrossRef]
- Han, Y.; Liu, Z.G.; Lee, D.J.; Liu, W.Q.; Chen, J.W.; Han, Z.W. Computer vision-based automatic rod-insulator defect detection in high-speed railway catenary system. Int. J. Adv. Robot. Syst. 2018, 15, 1–15. [Google Scholar] [CrossRef] [Green Version]
- Kang, G.Q.; Gao, S.B.; Yu, L.; Zhang, D.K. Deep architecture for high-speed railway insulator surface defect detection: Denoising autoencoder with multitask learning. IEEE Trans. Instru. Meas. 2019, 68, 2679–2690. [Google Scholar] [CrossRef]
- Gong, Y.S.; Jing, W.F. Anomaly detection of high-speed railway catenary damage. IETE J. Res. 2022, 1–9. [Google Scholar] [CrossRef]
- Gao, S.B. Automatic detection and monitoring system of pantograph-catenary in China’s high-speed railways. IEEE Trans. Instru. Meas. 2021, 70, 1–12. [Google Scholar] [CrossRef]
- Han, Z.W.; Liu, Z.G.; Yang, H.M.; Han, Y. Insulator fault detection based on curvelet coefficients morphology and zonal energy method. J. China Railw. Soc. 2013, 35, 36–40. [Google Scholar] [CrossRef]
- Zhang, G.N.; Liu, Z.G. Fault detection of catenary insulator damage/foreign material based on corner matching and spectral clustering. Chin. J. Sci. Instrum. 2014, 35, 1370–1377. [Google Scholar]
- Tan, P.; Li, X.F.; Xu, J.M.; Ma, J.E.; Wang, F.J.; Ding, J.; Fang, Y.T.; Ning, Y. Catenary insulator defect detection based on contour features and gray similarity matching. J. Zhejiang Univ. Sci. A 2020, 21, 64–73. [Google Scholar] [CrossRef]
- Huang, X.L.; Shang, E.B.; Xue, J.D.; Ding, H.W.; Li, P.P. A multi-feature fusion-based deep learning for insulator image identification and fault detection. In Proceedings of the 2020 IEEE 4th Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chongqing, China, 12–14 June 2020. [Google Scholar] [CrossRef]
- Li, Q.; Zhao, F.; Xu, Z.P.; Wang, J.; Liu, K.P.; Qin, L. Insulator and damage detection and location based on YOLOv5. In Proceedings of the 2022 International Conference on Power Energy Systems and Applications (ICoPESA), Singapore, 25–27 February 2022. [Google Scholar] [CrossRef]
- Bao, Y.Y.; Chen, T. Automatic identification and defect diagnosis of transmission line insulators based on YOLOv3 network. In Proceedings of the 2020 International Conference on Communications, Information System and Computer Engineering (CISCE), Kuala Lumpur, Malaysia, 3–5 July 2020. [Google Scholar] [CrossRef]
- Tudevdagva, U.; Battseren, B.; Hardt, W.; Troshina, G.V. Image processing based insulator fault detection method. In Proceedings of the 2018 XIV International Scientific-Technical Conference on Actual Problems of Electronics Instrument Engineering (APEIE), Novosibirsk, Russia, 2–6 October 2018. [Google Scholar] [CrossRef]
- Zhang, Z.J.; Ma, J.E.; Li, X.F.; Fang, Y.T. Insulator fault detection based on deep learning and Hu invariant moments. J. China Railw. Soc. 2021, 43, 71–77. [Google Scholar] [CrossRef]
- Zhang, Z.Y.; Huang, S.H.; Li, Y.X.; Li, H.; Hao, H.T. Image detection of insulator defects based on morphological processing and deep learning. Energies 2022, 15, 2465. [Google Scholar] [CrossRef]
- Arunabha, M.R.; Jayabrata, B. Real-time growth stage detection model for high degree of occultation using DenseNet-fused YOLOv4. Comput. Electron. Agr. 2022, 193, 106694. [Google Scholar] [CrossRef]
- Liu, Y.; Sun, P.; Wergeles, N.; Shang, Y. A survey and performance evaluation of deep learning methods for small object detection. Expert. Syst. Appl. 2021, 172, 114602. [Google Scholar] [CrossRef]
- He, K.M.; Gkioxari, G.; Dollar, P.; Girshick, R. Mask R-CNN. In Proceedings of the 2017 IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 2961–2969. [Google Scholar] [CrossRef]
- Yu, Y.; Zhang, K.L.; Yang, L.; Zhang, D.X. Fruit detection for strawberry harvesting robot in non-structural environment based on Mask-RCNN. Comput. Electron. Agr. 2019, 163, 104846. [Google Scholar] [CrossRef]
- Amo-Boateng, M.; NanaEkow, N.S.; AmprofiAmpah, A.; MartinKyereh, D. Instance segmentation scheme for roofs in rural areas based on Mask R-CNN. Egypt. J. Remote Sens. Space Sci. 2022. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, R.; Sun, D.Q.; Yu, F.; Gao, Z.; Sun, S.F.; Zheng, Z.C. Analyzing the pore structure of pervious concrete based on the deep learning framework of Mask R-CNN. Constr. Build. Mater. 2022, 318, 125987. [Google Scholar] [CrossRef]
- De, R.L.; Wen, X.Y.; Jullian, Y.; Karupppasamy, S.; Rajesh, C. A deep learning approach to the screening of malaria infection: Automated and rapid cell counting, object detection and instance segmentation using Mask R-CNN. Comput. Med. Imag. Grap. 2021, 88, 101845. [Google Scholar] [CrossRef]
- Shilpa, S.; Mamta, K.; Trilok, K. Face mask detection using deep learning: An approach to reduce risk of Coronavirus spread. J. Biomed. Inform. 2021, 120, 103848. [Google Scholar] [CrossRef]
- Yang, X.; Sun, H.; Fu, K.; Yang, J.R.; Sun, X.; Yan, M.L.; Guo, Z. Automatic ship detection in remote sensing images from Google Earth of complex scenes based on multiscale rotation dense feature pyramid networks. Remote Sens. 2018, 10, 132. [Google Scholar] [CrossRef] [Green Version]
- Tomasi, C.; Manduchi, R. Bilateral filtering for gray and color images. In Proceedings of the Sixth International Conference on Computer Vision, Bombay, India, 7 January 1998. [Google Scholar] [CrossRef]
- Yaniv, R.; John, I.; Peyman, M. RAISR: Rapid and accurate image super resolution. IEEE Trans. Comput. Imaging. 2017, 3, 110–125. [Google Scholar] [CrossRef] [Green Version]
- Zin, T.; Seta, S.; Nakahara, Y.; Yamaguchi, T.; Ikehara, M. Local image denoising using RAISR. IEEE Access 2022, 10, 22420–22428. [Google Scholar] [CrossRef]
- Hao, J.X.; Sen, Y.; Huang, X.X. Based on Surf feature extraction and insulator damage identification for capsule networks. In Proceedings of the 2019 International Conference on Computer Network, Electronic and Automation (ICCNEA), Xi’an, China, 27–29 September 2019. [Google Scholar] [CrossRef]
- Zhong, B.; Li, Y.B. Image feature point matching based on improved SIFT algorithm. In Proceedings of the 2019 IEEE 4th International Conference on Image, Vision and Computing (ICIVC), Xiamen, China, 5–7 July 2019. [Google Scholar] [CrossRef]
- Wang, C.P.; Wang, X.Y.; Xia, Z.Q.; Ma, B.; Shi, Y.Q. Image description with Polar Harmonic Fourier moments. IEEE Trans. Circ. Syst. Vid. 2020, 30, 4440–4452. [Google Scholar] [CrossRef]
- Xie, G.Y.; Guo, B.L.; Huang, Z.; Zheng, Y.; Yan, Y.Y. Combination of dominant color descriptor and Hu moments in consistent zone for content based image retrieval. IEEE Access 2020, 8, 146284–146299. [Google Scholar] [CrossRef]
- Lv, C.; Zhang, P.L.; Wu, D.H. Gear Fault Feature Extraction Based on Fuzzy Function and Improved Hu Invariant Moments. IEEE Access 2020, 8, 47490–47499. [Google Scholar] [CrossRef]
- Papakostas, G.A.; Boutalis, Y.S.; Karras, D.A.; Mertzios, B.G. Modified factorial-free direct methods for Zernike and Pseudo-Zernike moment computation. IEEE Trans. Instrum. Meas. 2009, 58, 2121–2131. [Google Scholar] [CrossRef]
- Liao, S.X.; Pawlak, M. On the accuracy of Zernike moments for image analysis. IEEE Trans. Pattern. Anal. 1998, 20, 1358–1364. [Google Scholar] [CrossRef] [Green Version]
- Li, H.Z.; Huang, H.; Ye, Z.J.; Li, H.F. Hyperspectral image classification using adaptive weighted quaternion Zernike moments. IEEE Trans. Signal. Proces. 2022, 70, 701–713. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Implementation Method | Characteristic |
|---|---|---|
| SSD | Multiple layers are used for object detection, lower layers have smaller scales and higher layers have larger scales; Fully convolutional layers are used to predict confidence scores and localization offset. | Poor performance on small objects due to lower layers lacking deep semantic information. |
| YOLO | Input image is divided into k × k grids and object detection is performed on each grid. | Low localization accuracy due to poor discrimination when object is partially located in one grid. |
| Faster R-CNN | A regional proposal network (RPN) is adopted in the first stage, and the proposals are further classified and localized through the ROI (Region of Interest) Pooling layer in the second stage. | The ROI Pooling layer adopts a quantitative rounding method, which will produce characteristic dislocation. |
| Mask R-CNN | FPN (Feature Pyramid Network) is used to extract features and RPN (Regional Proposal Network) is used to generate proposals in the first stage. ROI Align is used for location and classification, and mask branch is used for instance segmentation in the second stage. | The ROI Align adopts a bilinear interpolation method, which can avoid feature dislocation; the mask branch is added, and the accuracy of small target detection can reach pixel level. |
| Hyperparameter | Setting |
|---|---|
| Learning rate | 0.0025 |
| Iterations | 1000 |
| Batch size | 50 |
| Number of epochs | 200 |
| Optimizer | SGD |
| Loss Function Name | L | Lrpn_cls | Lrpn_bbox | Lcls | Lbbox | Lmask |
|---|---|---|---|---|---|---|
| value | 0.2368 | 0.0038 | 0.0140 | 0.0435 | 0.1023 | 0.0733 |
| Category | Total | Number of Correct Judgments | Number of Misjudgments |
|---|---|---|---|
| Undamaged insulator | 483 | 453 | 30 |
| Damaged insulator | 29 | 25 | 4 |
| Category | Total | Number of Correct Judgments | Number of Misjudgments |
|---|---|---|---|
| Undamaged insulator | 483 | 397 | 86 |
| Damaged insulator | 29 | 25 | 4 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, T.; Hao, T. Damage Detection of Insulators in Catenary Based on Deep Learning and Zernike Moment Algorithms. Appl. Sci. 2022, 12, 5004. https://doi.org/10.3390/app12105004
Li T, Hao T. Damage Detection of Insulators in Catenary Based on Deep Learning and Zernike Moment Algorithms. Applied Sciences. 2022; 12(10):5004. https://doi.org/10.3390/app12105004
Chicago/Turabian StyleLi, Teng, and Tian Hao. 2022. "Damage Detection of Insulators in Catenary Based on Deep Learning and Zernike Moment Algorithms" Applied Sciences 12, no. 10: 5004. https://doi.org/10.3390/app12105004
APA StyleLi, T., & Hao, T. (2022). Damage Detection of Insulators in Catenary Based on Deep Learning and Zernike Moment Algorithms. Applied Sciences, 12(10), 5004. https://doi.org/10.3390/app12105004