
RBF Sliding Mode Control Method for an Upper Limb Rehabilitation Exoskeleton Based on Intent Recognition


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (1)
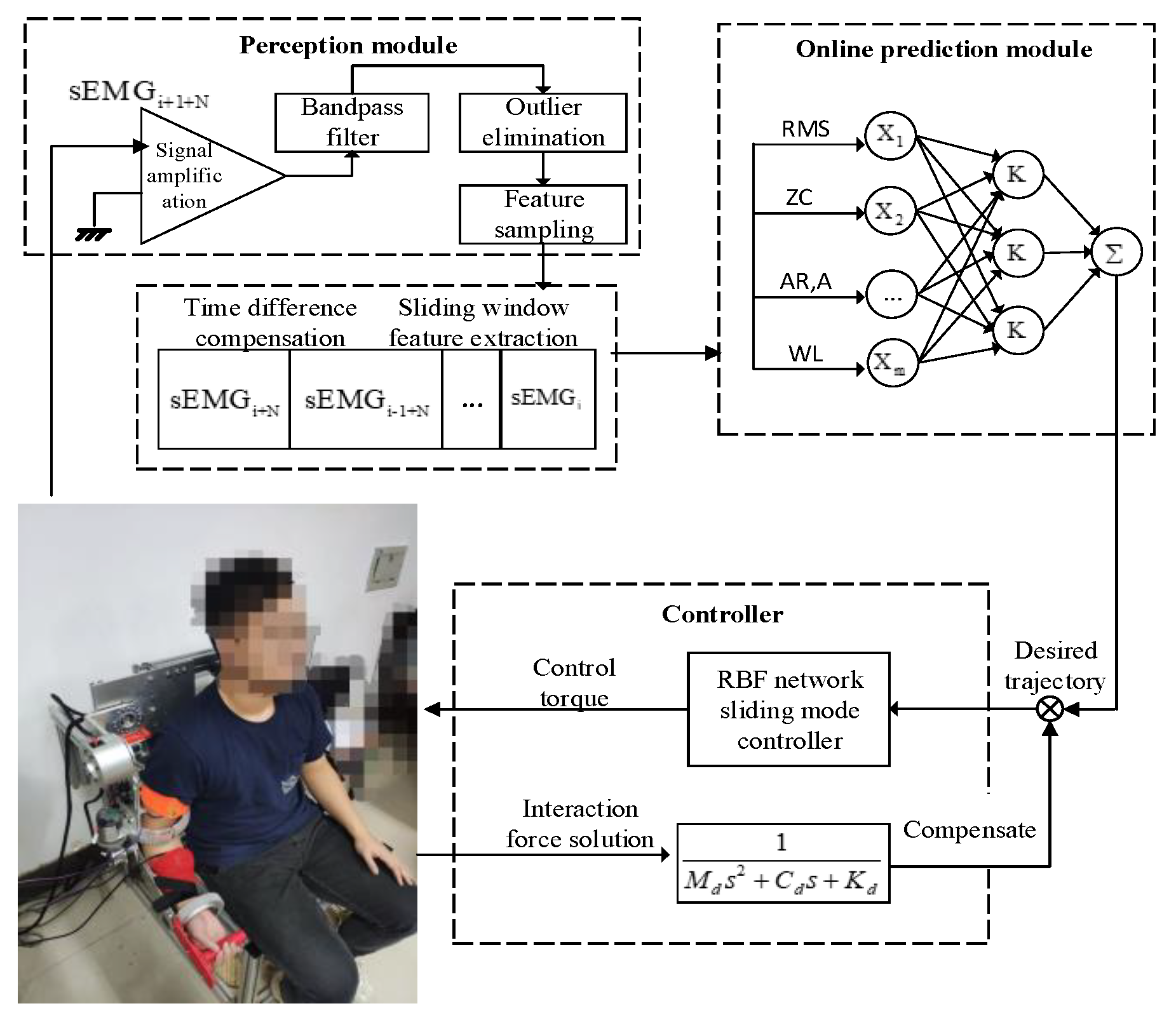
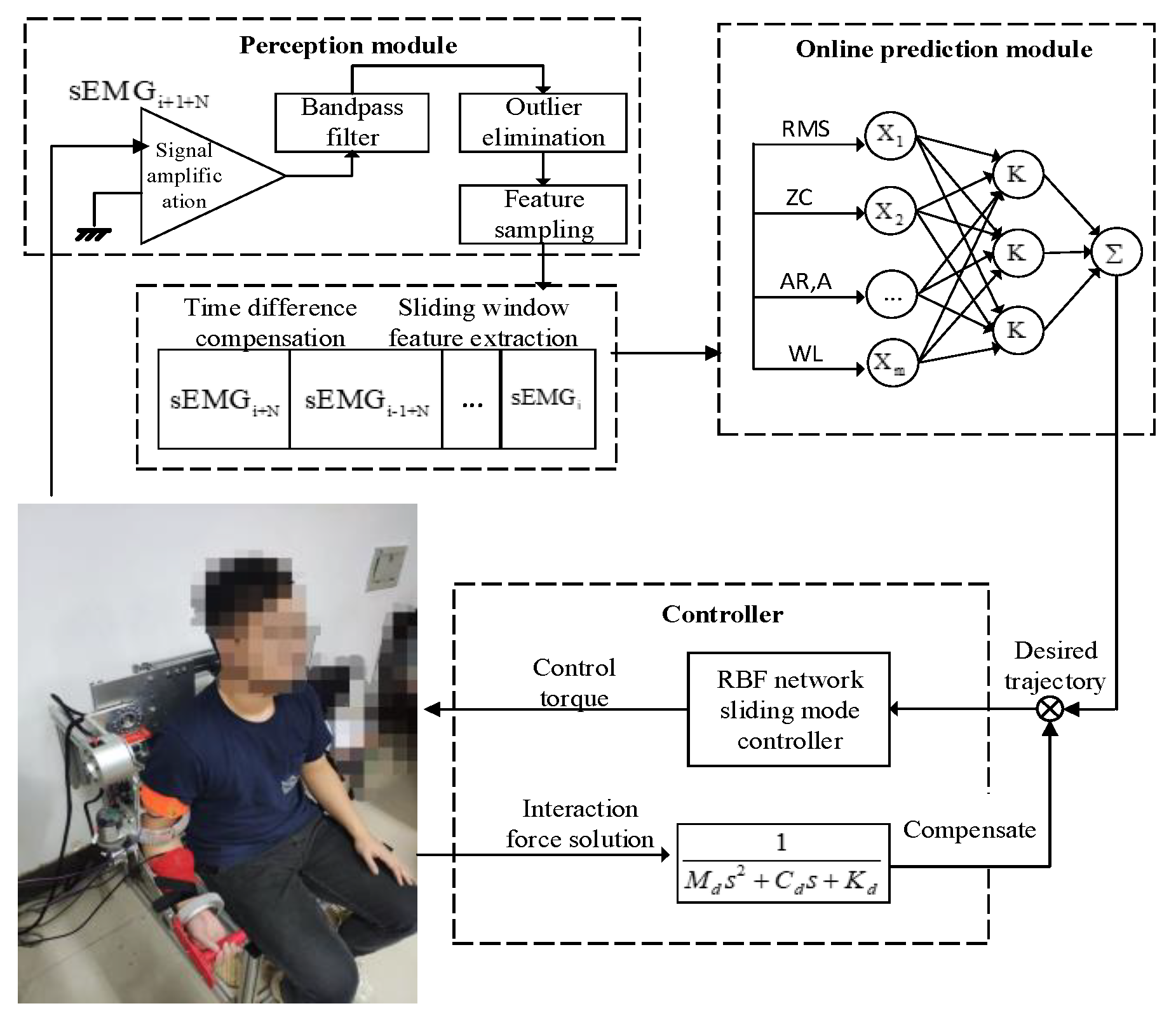
- We proposed an sEMG-based LSSVM joint angle prediction model to obtain the patient’s motion intention. According to the physiological characteristics of sEMG, the preprocessing and feature extraction were completed, and the feature optimization of time difference compensation was introduced for the time delay problem that exists in real-time processing.
- (2)
- An adaptive sliding mode controller based on an RBF network approximation was proposed for exoskeleton control, which improved the fast approximation ability of the model and the compensation for uncertainty disturbance. The error of the trajectory tracking was dynamically adjusted by acquiring the human–computer interaction force to ensure the flexibility of the rehabilitation process.
2. Estimation of Joint Motion Intention Based on sEMG
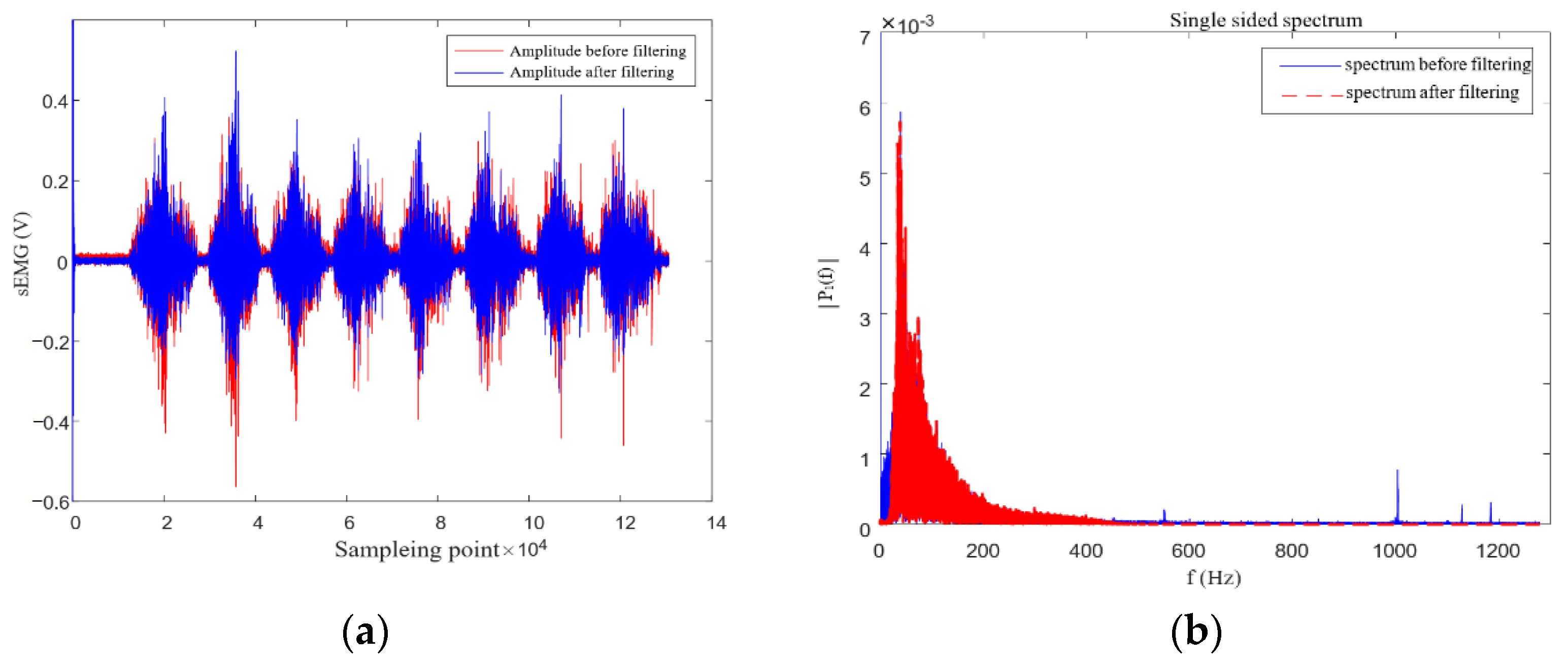
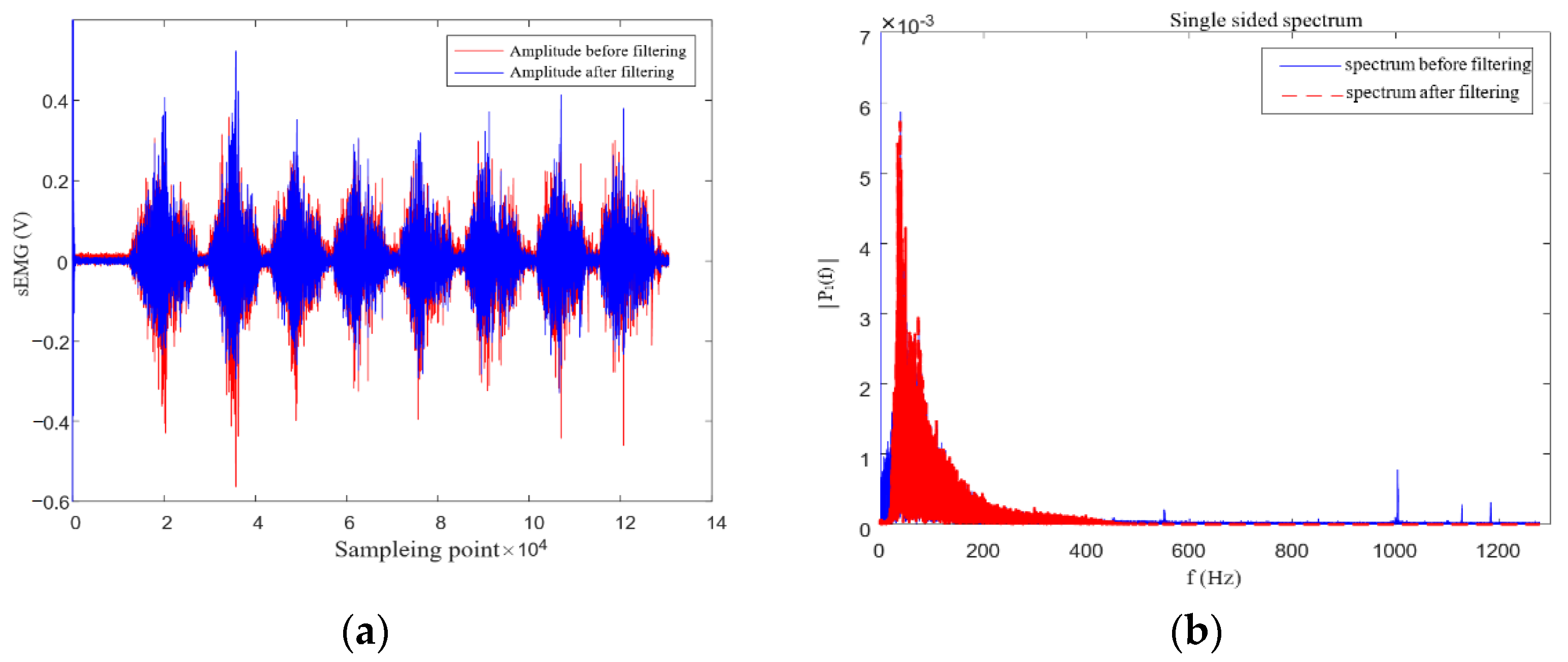
2.1. sEMG Signal Pre-Processing
- (1)
- The RMS reflects the validity of the signal, which is expressed aswhere x(i) is the sEMG amplitude sampling sequence and N is the number of sampling points in the moving sliding window; in this study, N was 256.
- (2)
- The WL reflects the degree of cumulative change of the sEMG during a period, which is expressed as
- (3)
- The ZC points are the number of crossings between the amplitude of the sEMG signal and a certain coordinate threshold, which represent an approximate estimation of the frequency domain characteristics as
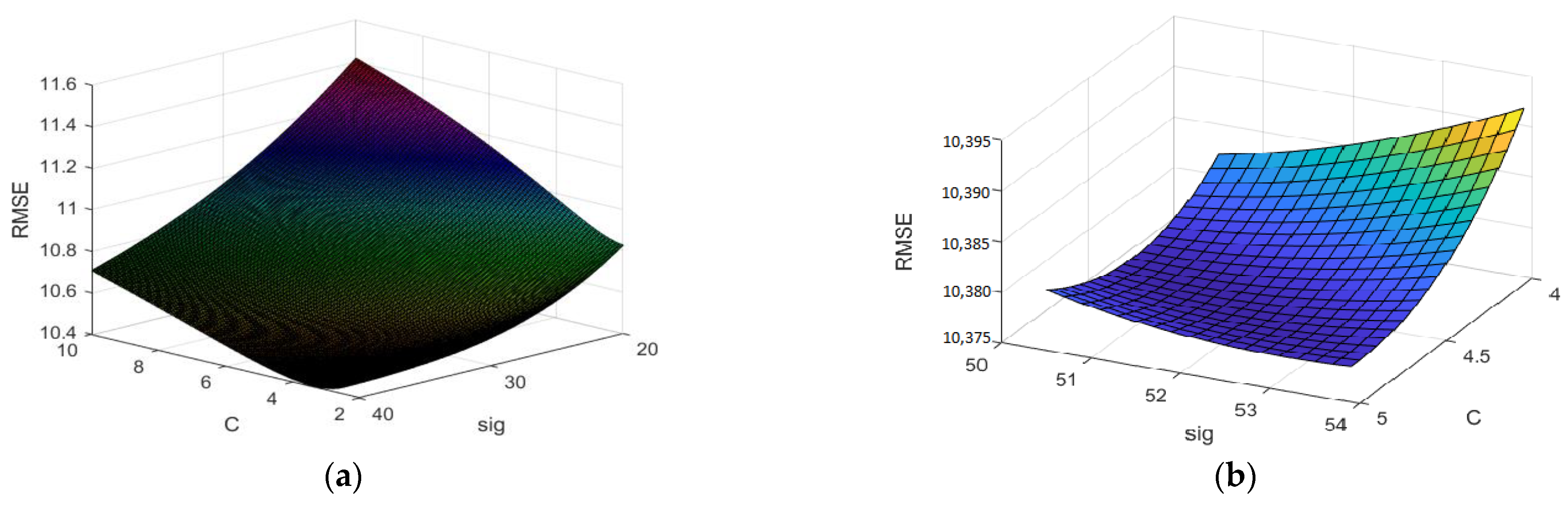
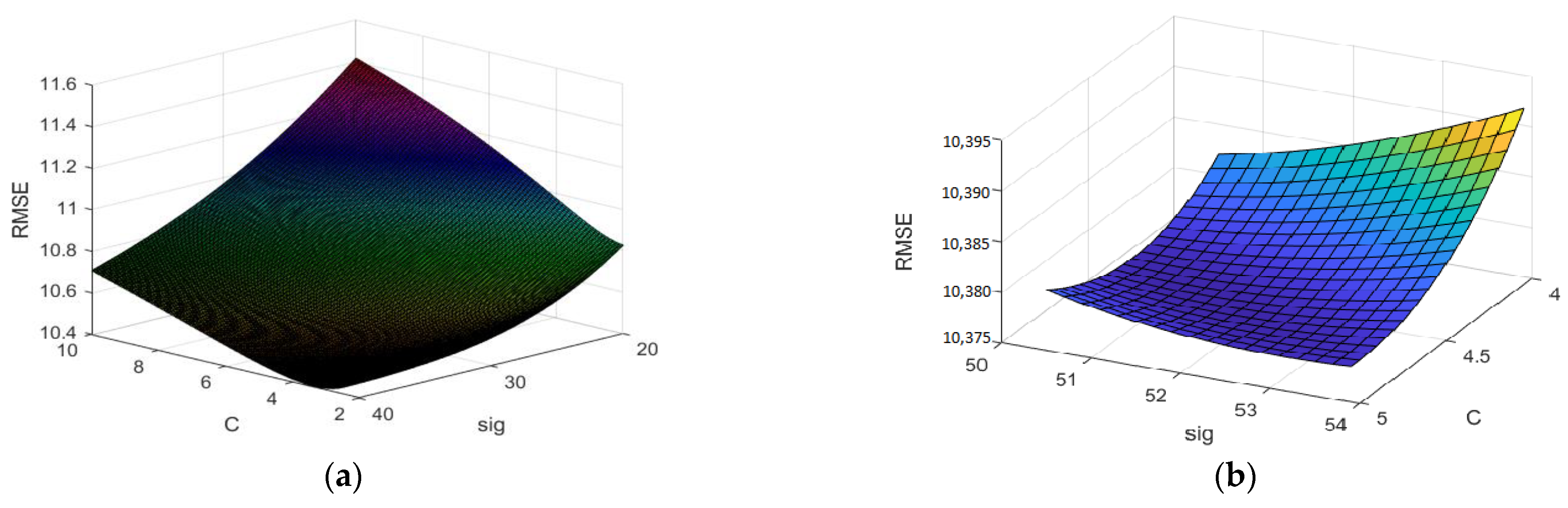
2.2. Joint Angle Prediction Based on LSSVM
3. Controller Design Based on RBF
- (1)
- The oblique symmetry of the dynamic model of the robotic arm system: ;
- (2)
- ;
- (3)
- .
4. Main Results
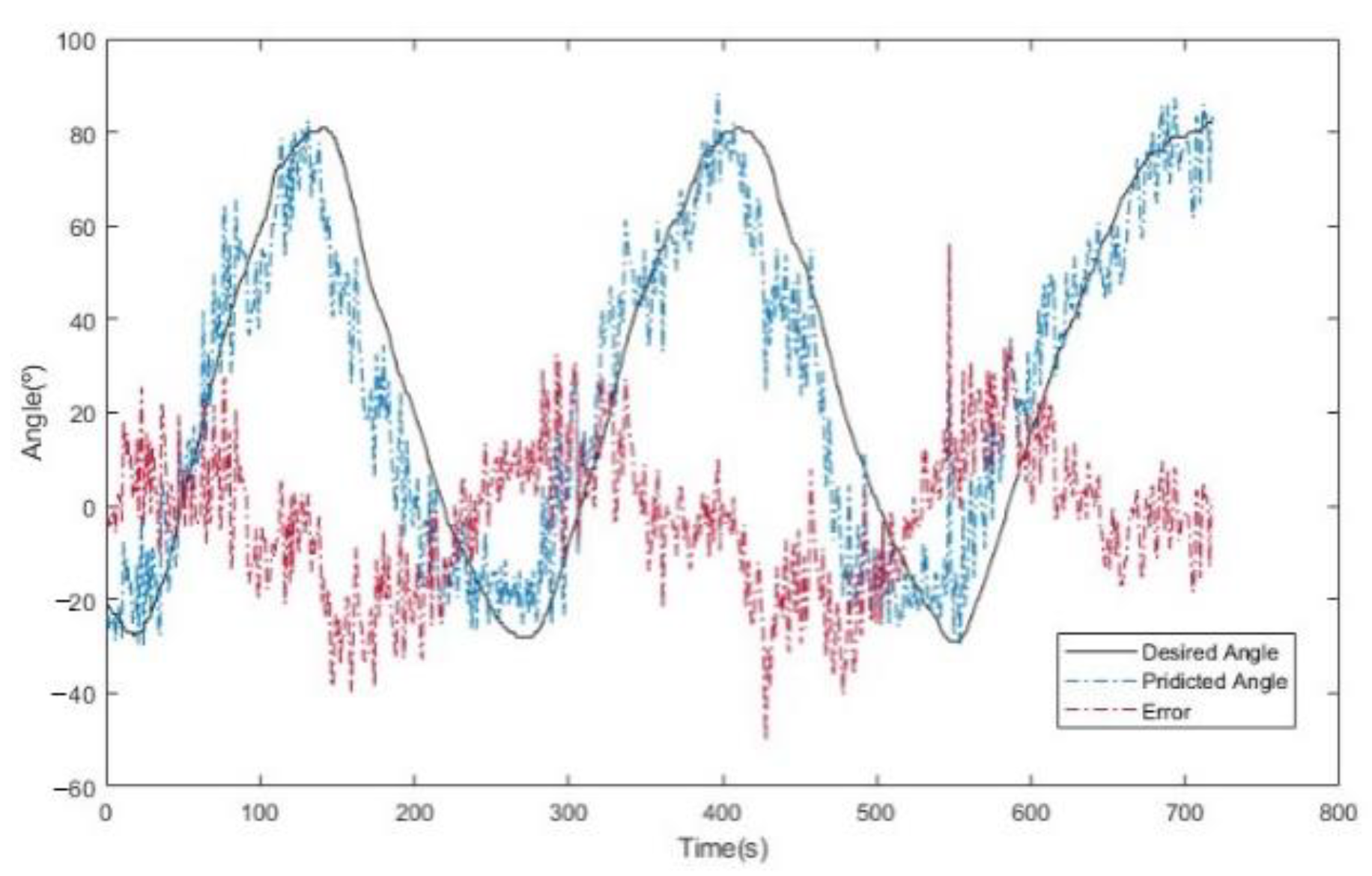
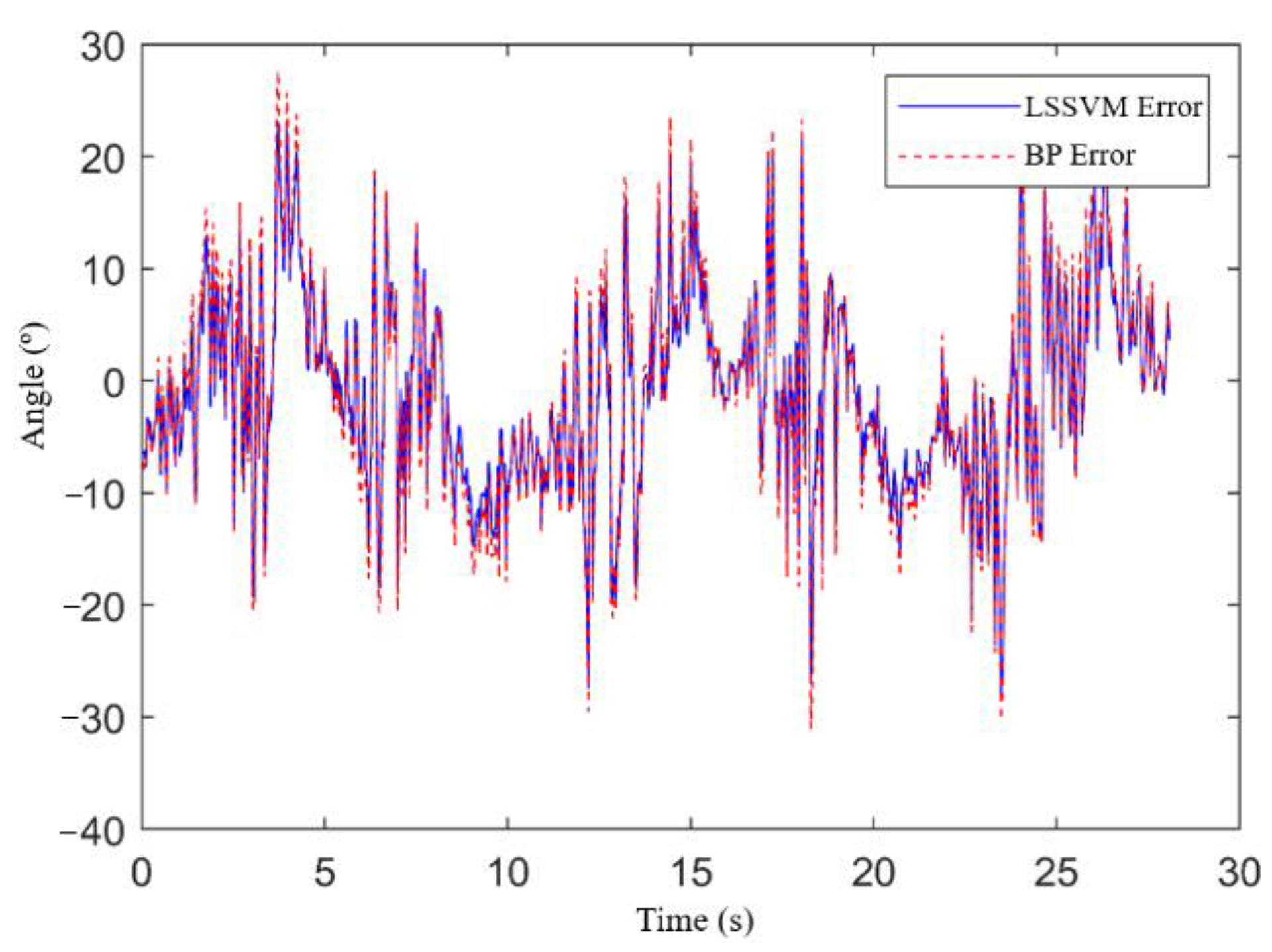
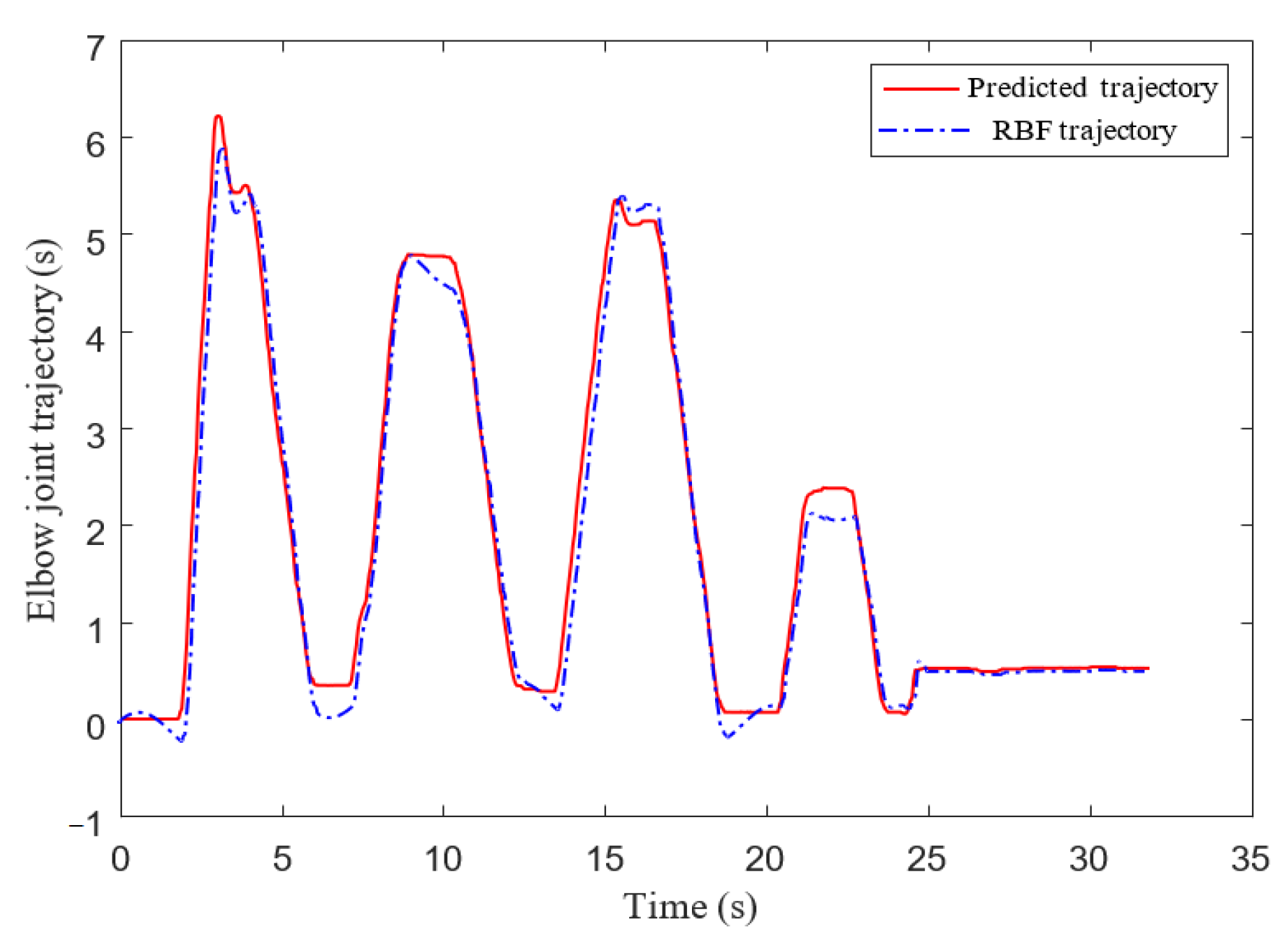
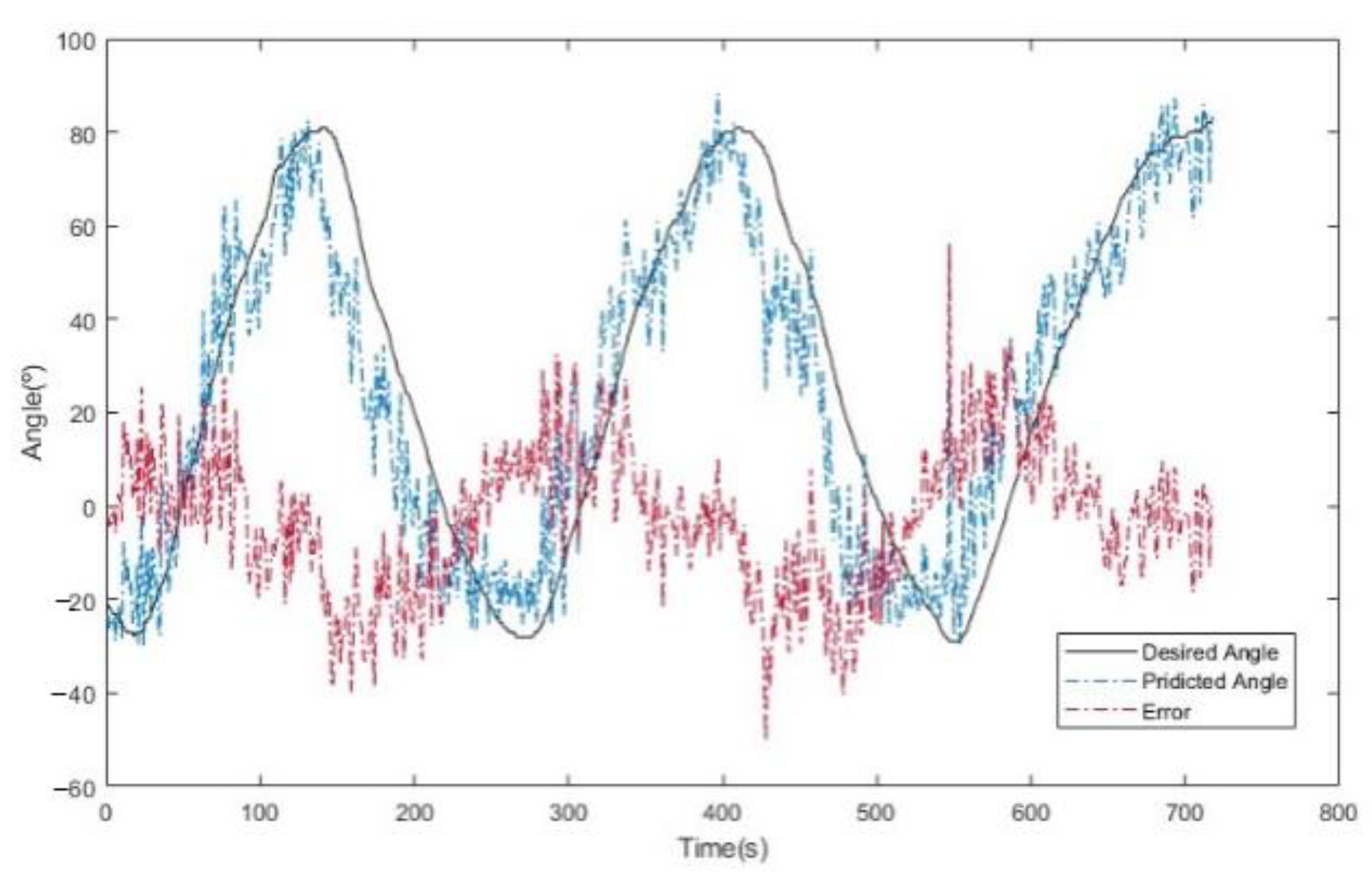
4.1. Joint Angle Prediction Experiment Based on LSSVM
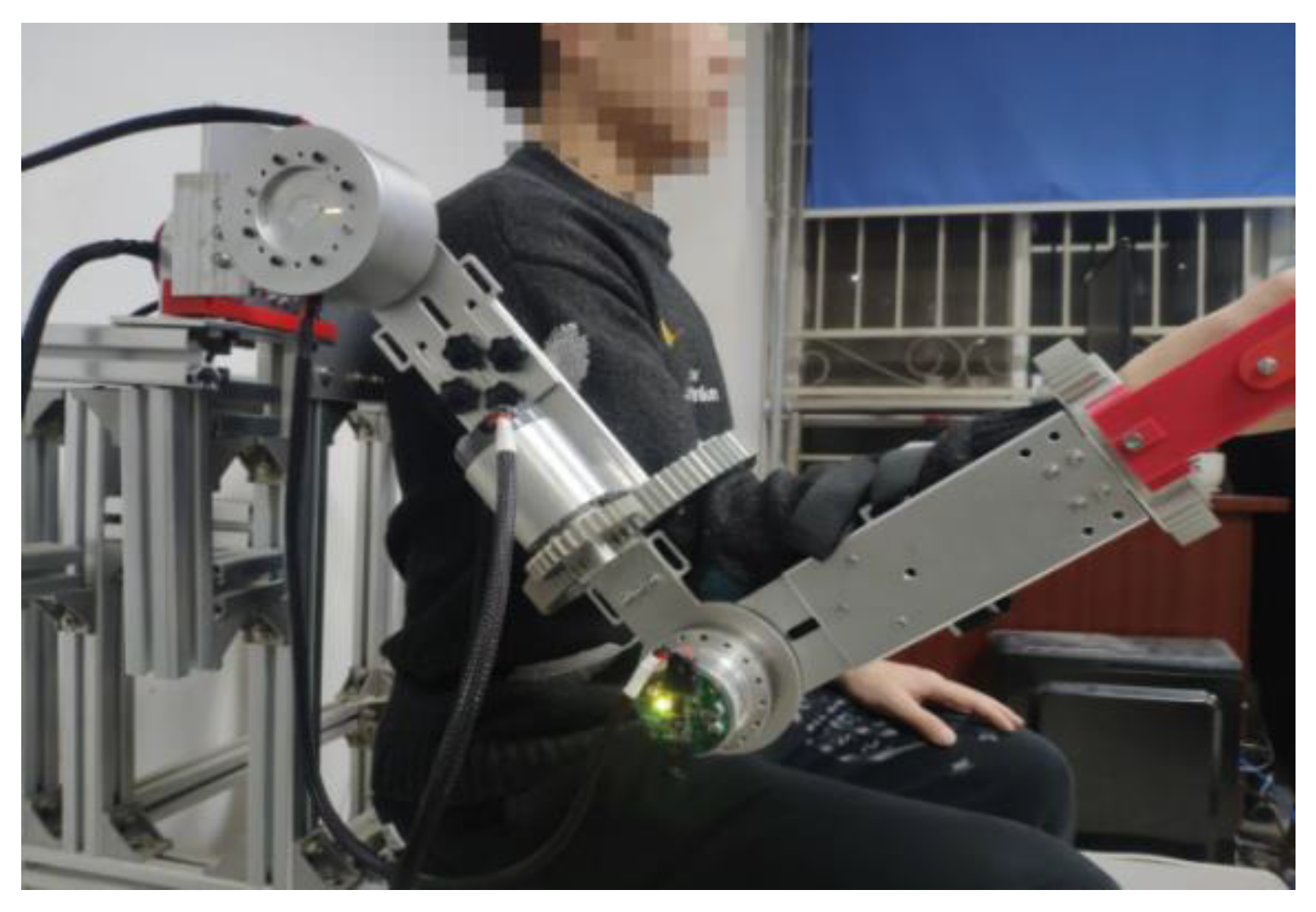
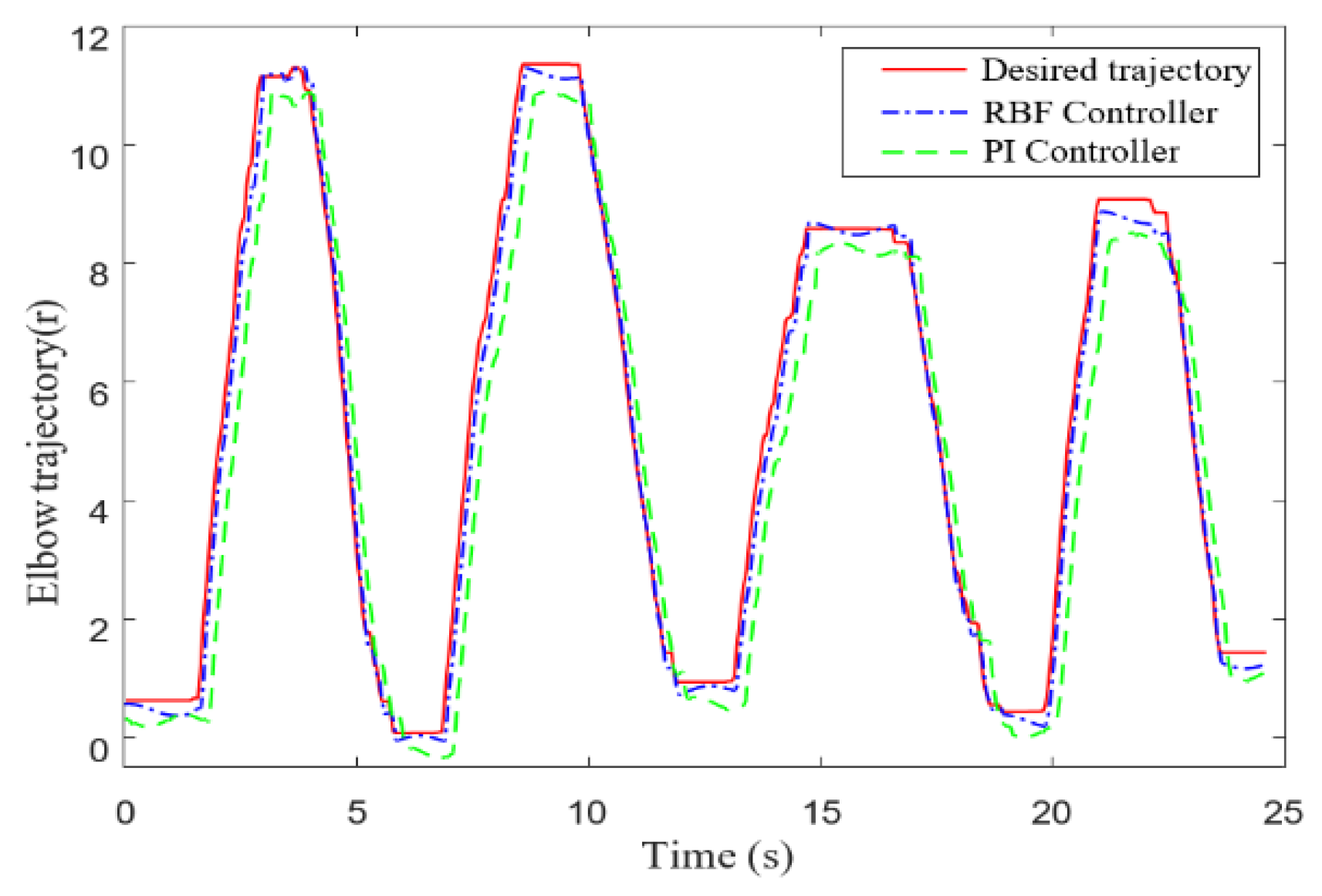
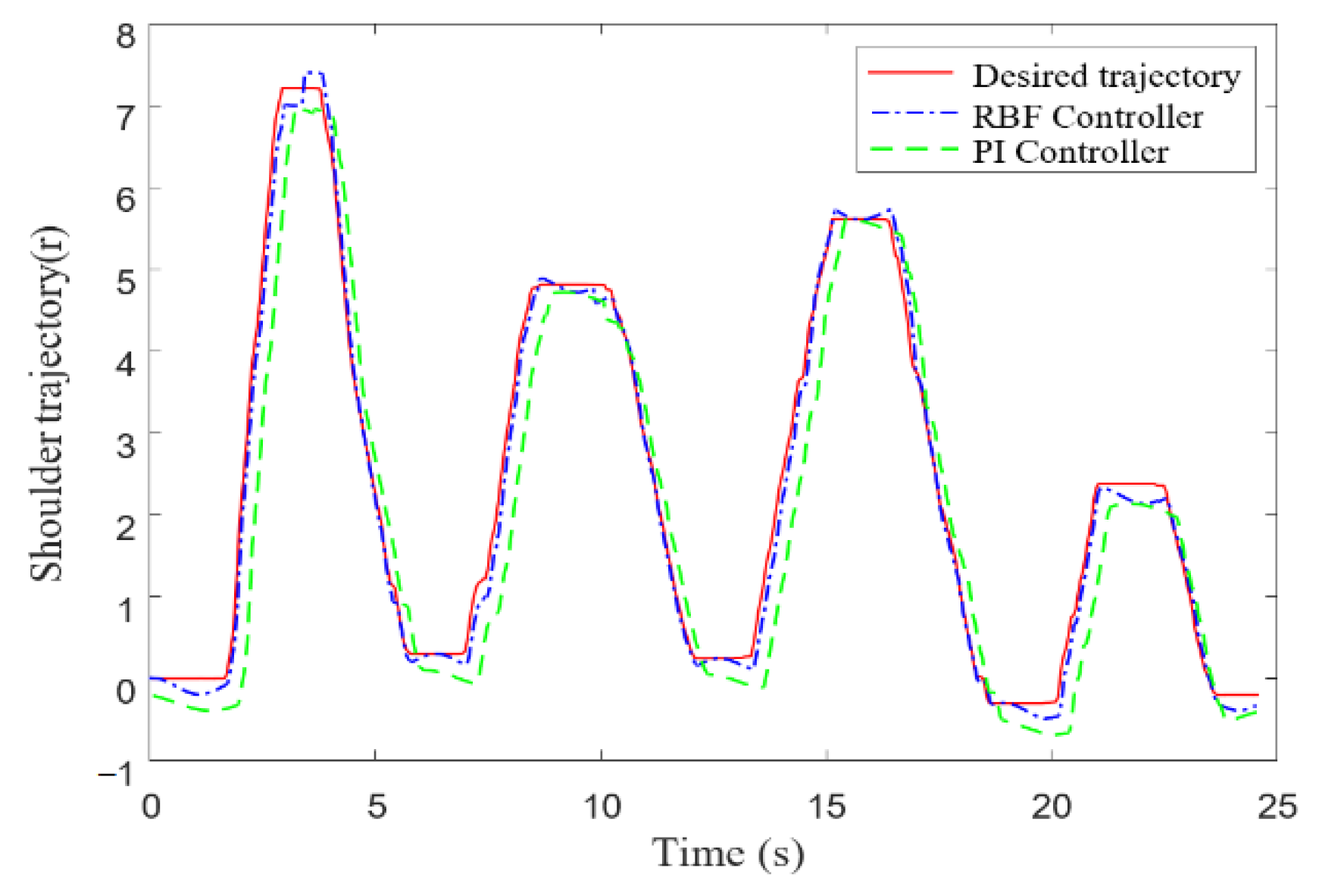
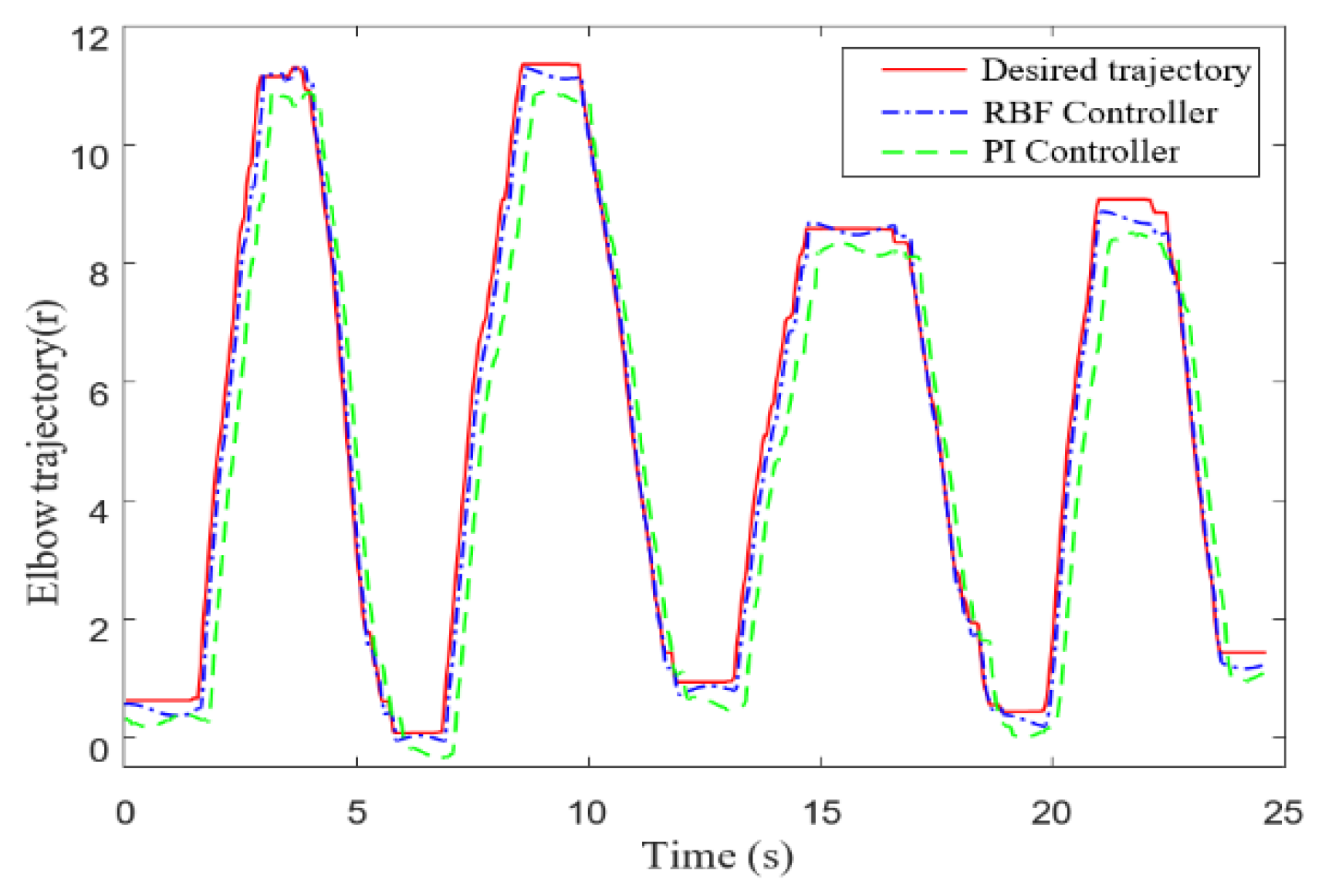
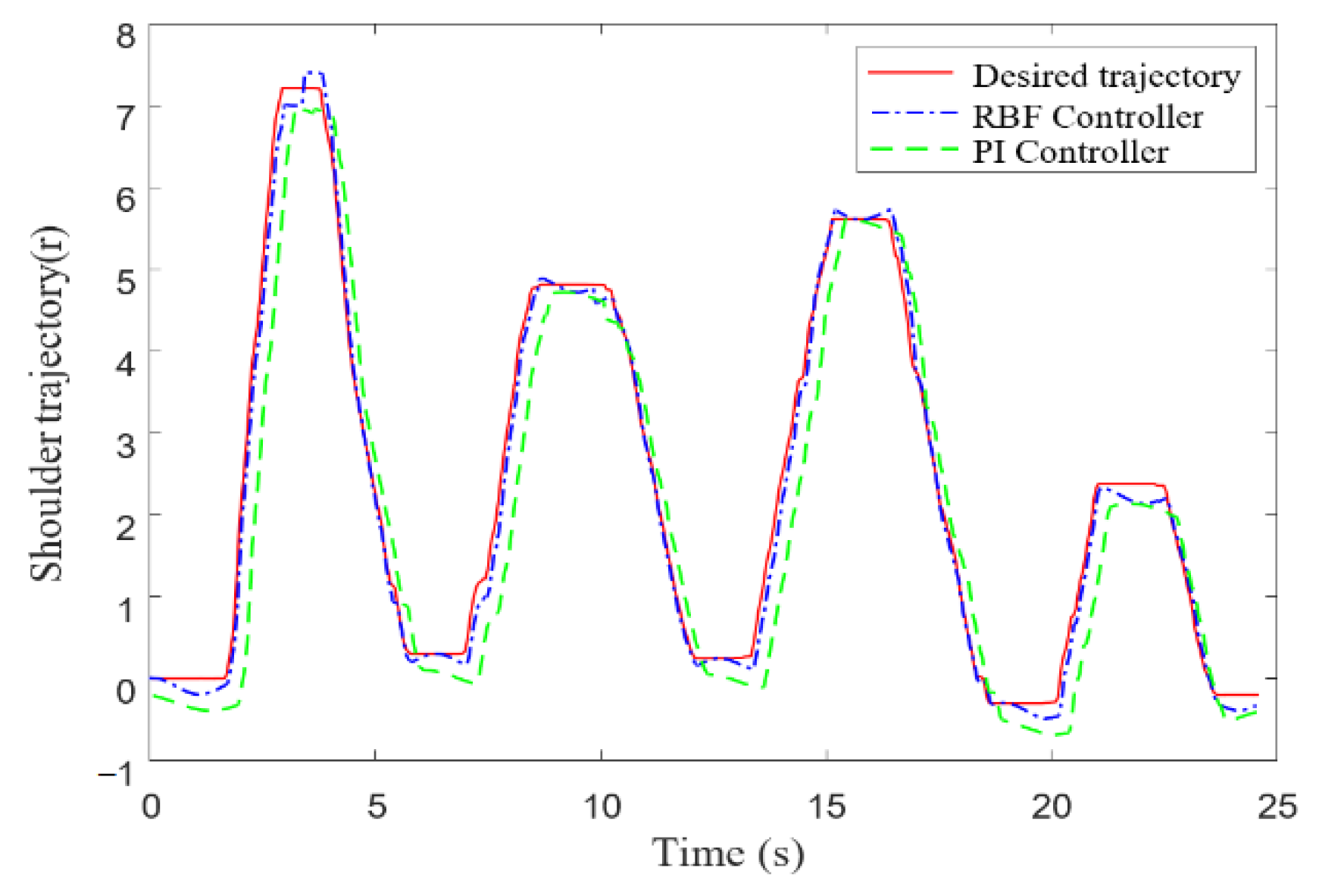
4.2. Passive Rehabilitation Training Experiment
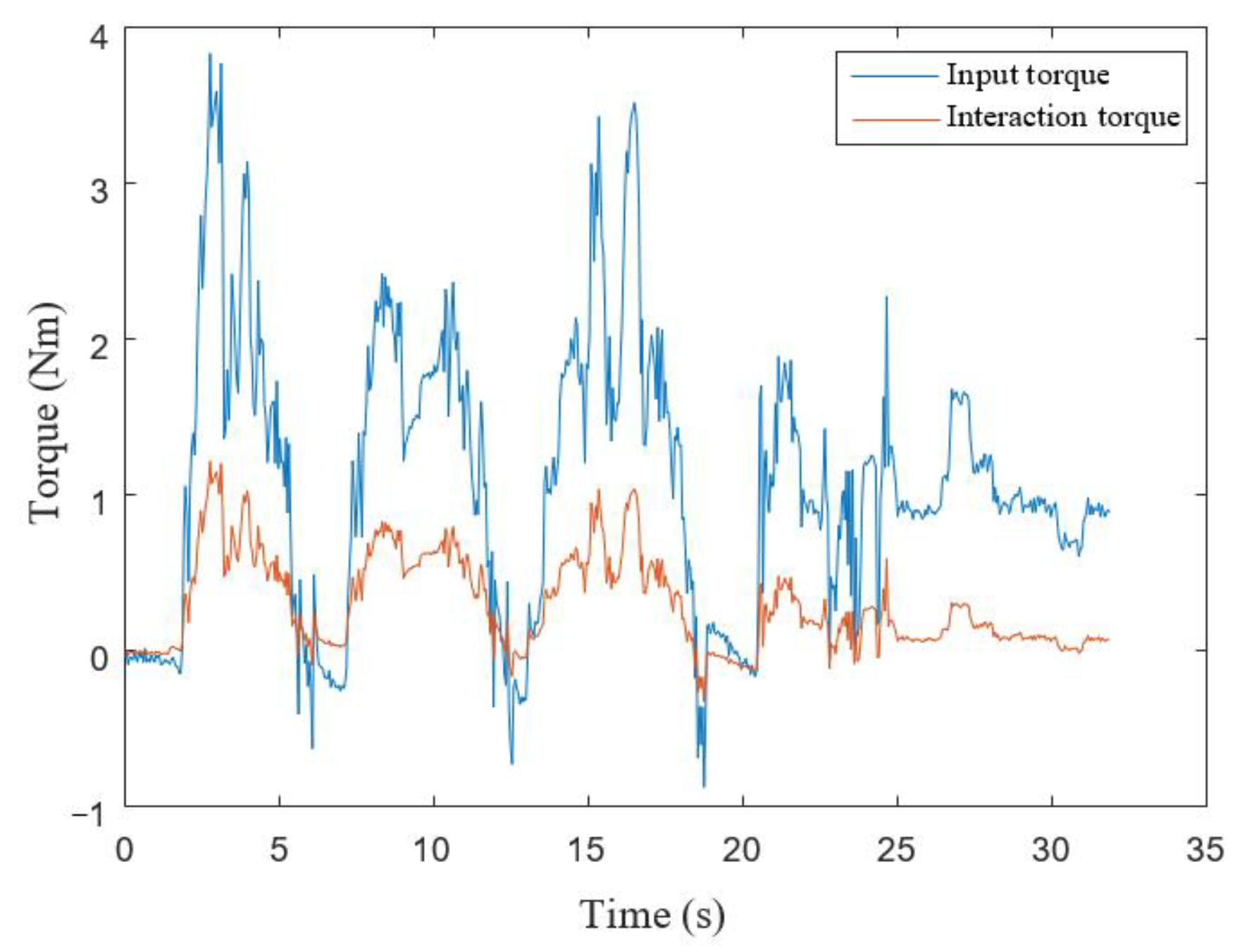
4.3. Active Rehabilitation Training Experiment
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Louie, D.R.; Eng, J.J. Powered robotic exoskeletons in post-stroke rehabilitation of gait: A scoping review. J. Neuroeng. Rehabil. 2016, 13, 53. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tu, X.; Zhou, X.; Li, J.; Su, C.; Sun, X.; Han, H.; Jiang, X.; He, J. Iterative learning control applied to a hybrid rehabilitation exoskeleton system powered by PAM and FES. Clust. Comput. 2017, 20, 2855–2868. [Google Scholar] [CrossRef]
- Chen, X.; Chen, Z.; Gao, S.; Gao, X. Brain-computer interface based on intermodulation frequency. J. Neural. Eng. 2013, 10, 066009. [Google Scholar] [CrossRef] [PubMed]
- Bouton, C.E.; Shaikhouni, A.; Annetta, N.V.; Bockbrader, M.A.; Friedenberg, D.A.; Nielson, D.M.; Sharma, G.; Sederberg, P.B.; Glenn, B.C.; Mysiw, W.J.; et al. Restoring cortical control of functional movement in a human with quadriplegia. Nature 2016, 533, 247–250. [Google Scholar] [CrossRef] [PubMed]
- Gharehbaghi, A.; Lindén, M. A deep machine learning method for classifying cyclic time series of biological signals using time-growing neural network. IEEE Trans. Neural Netw. Learn. Syst. 2017, 29, 4102–4115. [Google Scholar] [CrossRef] [PubMed]
- Russell, J.; Bergmann, J. A Systematic Literature Review of Intent Sensing for Control of Medical Devices. IEEE Trans. Med. Robot. Bionics 2022, 4, 118–129. [Google Scholar] [CrossRef]
- Darryl, T.G. Adjustment of muscle mechanics model parameters to simulate dynamic contractions in older adults. J. Biomech. Eng. 2003, 125, 70–73. [Google Scholar]
- Hicks, J.L.; Uchida, T.K.; Seth, A.; Rajagopal, A.; Delp, S.L. Is my model good enough? Best practices for verification and validation of musculoskeletal models and simulations of movement. J. Biomech. Eng. 2015, 137, 56–57. [Google Scholar] [CrossRef]
- Sierotowicz, M.; Lotti, N.; Nell, L.; Missiroli, F.; Alicea, R.; Zhang, X.; Xiloyannis, M.; Rupp, R.; Papp, E.; Krzywinski, J.; et al. EMG-Driven Machine Learning Control of a Soft Glove for Grasping Assistance and Rehabilitation. IEEE Robot. Autom. Lett. 2022, 7, 1566–1573. [Google Scholar] [CrossRef]
- Jie, L.; Zhengyi, S.; Feifei, Z.; Wenxin, C.; Xin, C.; Yurong, L. Gaussian process autoregression for joint angle prediction based on sEMG signals. Front. Public Health 2021, 9, 567–569. [Google Scholar]
- Nasr, A.; Bell, S.M.; He, J.; Whittaker, R.; Dickerson, C.R.; Jiang, N.; McPhee, J. MuscleNET: Mapping electromyography to kinematic and dynamic bio-mechanical variables by machine learning. J. Neural Eng. 2021, 18, 46–49. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Hou, W.; Luo, H.; Wu, X.; Liao, Y.; Fan, X.; Zheng, X. The impact of sEMG feature weight on the recognition of similar grasping gesture. In Proceedings of the International Conference on Advanced Robotics and Mechatronics, Macau, China, 18–20 August 2016; pp. 260–265. [Google Scholar]
- Xu, L.; Zhang, K.; Xu, Z.; Yang, G. [Convolutional neural network human gesture recognition algorithm based on phase portrait of surface electromyography energy kernel]. J. Biomed. Eng. 2021, 38, 621–629. [Google Scholar]
- Tigrini, A.; Pettinari, L.A.; Verdini, F.; Fioretti, S.; Mengarelli, A. Shoulder Motion Intention Detection Through Myoelectric Pattern Recognition. IEEE Sens. Lett. 2021, 5, 1–4. [Google Scholar] [CrossRef]
- Proietti, T.; Crocher, V.; Roby-Brami, A.; Jarrasse, N. Upper-limb robotic exoskeletons for neurorehabilitation: A review on control strategies. IEEE Rev. Biomed. Eng. 2016, 9, 4–14. [Google Scholar] [CrossRef] [Green Version]
- Bauer, G.; Pan, Y.J. Review of Control Methods for Upper Limb Telerehabilitation with Robotic Exoskeletons. IEEE Access 2020, 8, 203382–203397. [Google Scholar] [CrossRef]
- Krebs, H.I.; Ferraro, M.; Buerger, S.P.; Newbery, M.J.; Makiyama, A.; Sandmann, M.; Lynch, D.; Volpe, B.T.; Hogan, N. Rehabilitation robotics: Pilot trial of a spatial extension for MIT-Manus. J. Neuroeng. Rehabil. 2004, 1, 5. [Google Scholar] [CrossRef] [Green Version]
- Lum, P.S.; Burgar, C.G.; Shor, P.C.; Majmundar, M.; Van der Loos, M. Robot-assisted movement training compared with conventional therapy techniques for the rehabilitation of upper-limb motor function after stroke. Arch. Phys. Med. Rehabil. 2002, 83, 952–959. [Google Scholar] [CrossRef] [Green Version]
- Riener, R.; Guidali, M.; Keller, U.; Duschau-Wicke, A.; Klamroth-Marganska, V.; Nef, T. Transferring Armin to the clinics and industry. Top. Spinal Cord Inj. Rehabil. 2011, 17, 54–59. [Google Scholar] [CrossRef]
- Raibert, M.H.; Craig, J.J. Hybrid position/force control of manipulators. Neurocomputing 1981, 10, 10–14. [Google Scholar] [CrossRef]
- Hogan, H. Impedance Control: An Approach to Manipulation. In Proceedings of the 1984 American Control Conference, San Diego, CA, USA, 6–8 June 1984; pp. 304–313. [Google Scholar] [CrossRef]
- Yang, Q.; Xie, C.; Tang, R.; Liu, H.; Song, R. Hybrid active control with human intention detection of an upper-limb cable-driven rehabilitation robot. IEEE Access 2020, 8, 195206–195215. [Google Scholar] [CrossRef]
- Li, H.-Y.; Dharmawan, A.G.; Paranawithana, I.; Yan, L.; Tan, U. A control scheme for physical human-robot interaction coupled with an environment of unknown stiffness. J. Intell. Robot. Syst. 2020, 100, 165–182. [Google Scholar] [CrossRef]
- Khan, S.M.; Khan, A.A.; Farooq, O. Selection of Features and Classifiers for EMG-EEG-Based Upper Limb Assistive Devices—A Review. IEEE Rev. Biomed. Eng. 2019, 13, 248–260. [Google Scholar] [CrossRef] [PubMed]
- Tatinati, S.; Veluvolu, K.C.; Ang, W.T. Multistep prediction of physiological tremor based on machine learning for robotics assisted microsurgery. IEEE Trans. Cybern. 2014, 45, 328–339. [Google Scholar] [CrossRef] [PubMed]
- Xie, H.B.; Zheng, Y.P.; Guo, J.Y.; Chen, X.; Shi, J. Estimation of wrist angle from sonomyography using support vector machine and artificial neural network models. Med. Eng. Phys. 2019, 31, 384–391. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, T.P.; Fei, S.M. Decentralized Adaptive Variable Structure Control Based on Fuzzy Logic. Control. Decis. 1997. [Google Scholar]





Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kong, D.; Wang, W.; Guo, D.; Shi, Y. RBF Sliding Mode Control Method for an Upper Limb Rehabilitation Exoskeleton Based on Intent Recognition. Appl. Sci. 2022, 12, 4993. https://doi.org/10.3390/app12104993
Kong D, Wang W, Guo D, Shi Y. RBF Sliding Mode Control Method for an Upper Limb Rehabilitation Exoskeleton Based on Intent Recognition. Applied Sciences. 2022; 12(10):4993. https://doi.org/10.3390/app12104993
Chicago/Turabian StyleKong, Dezhi, Wendong Wang, Dong Guo, and Yikai Shi. 2022. "RBF Sliding Mode Control Method for an Upper Limb Rehabilitation Exoskeleton Based on Intent Recognition" Applied Sciences 12, no. 10: 4993. https://doi.org/10.3390/app12104993
APA StyleKong, D., Wang, W., Guo, D., & Shi, Y. (2022). RBF Sliding Mode Control Method for an Upper Limb Rehabilitation Exoskeleton Based on Intent Recognition. Applied Sciences, 12(10), 4993. https://doi.org/10.3390/app12104993