
Deep Learning-Aided Downlink Beamforming Design and Uplink Power Allocation for UAV Wireless Communications with LoRa


Abstract
:1. Introduction
1.1. Related Work
1.2. System Model and Problem Formulation
1.2.1. LoRa
1.2.2. Downlink Scenario
1.2.3. Uplink Scenario
2. Downlink Beamforming Design and Uplink Power Allocation
2.1. Methodology: Convex Optimization-Based Downlink Beamforming Design and Uplink Power Allocation
2.1.1. Downlink Scenario
2.1.2. Uplink Scenario
2.2. Methodology: Deep Learning-Based Downlink Beamforming Design and Uplink Power Allocation
2.2.1. Limitations of the Conventional Approaches
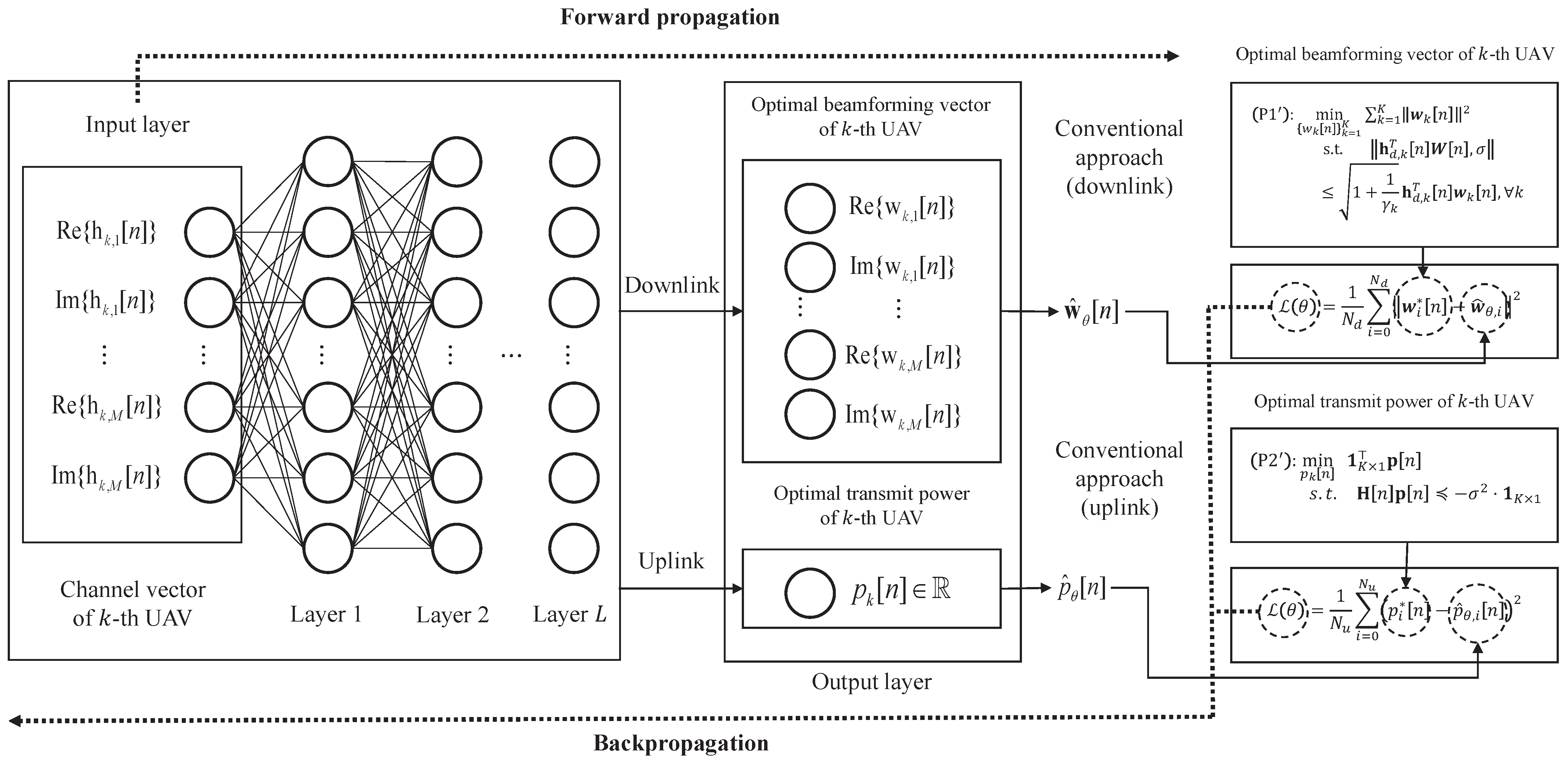
2.2.2. Network Architecture
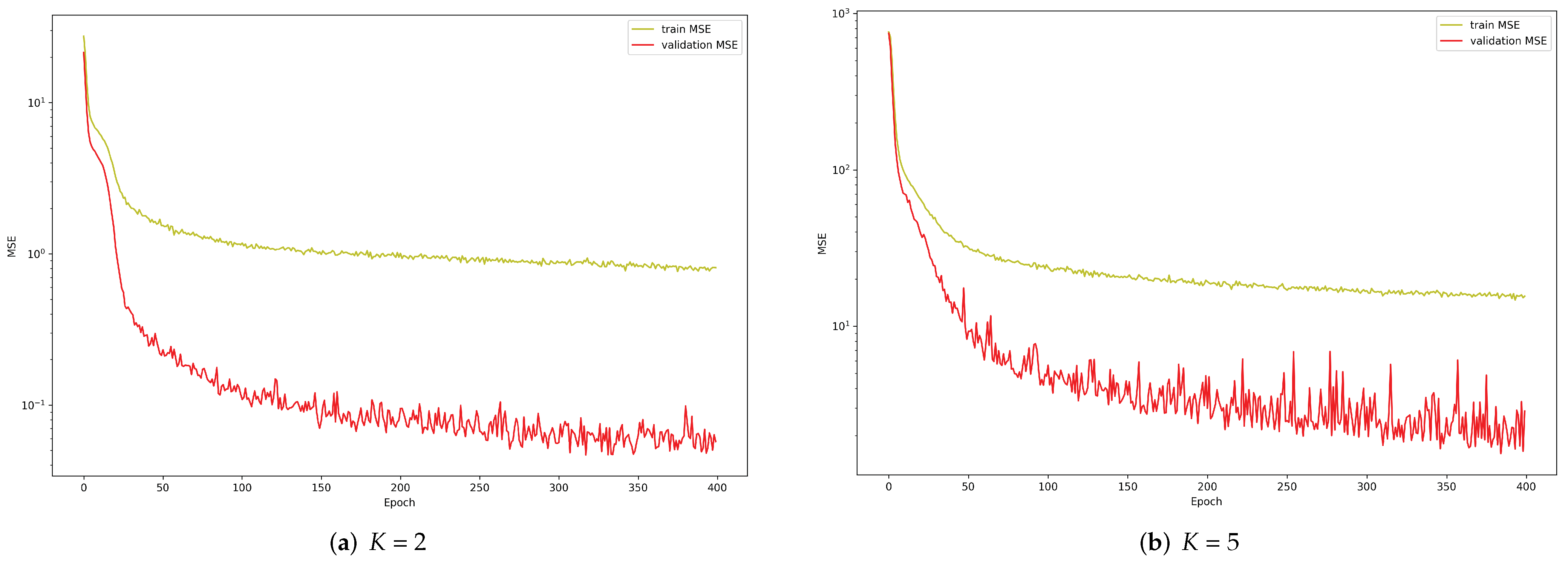
2.2.3. Training Procedure
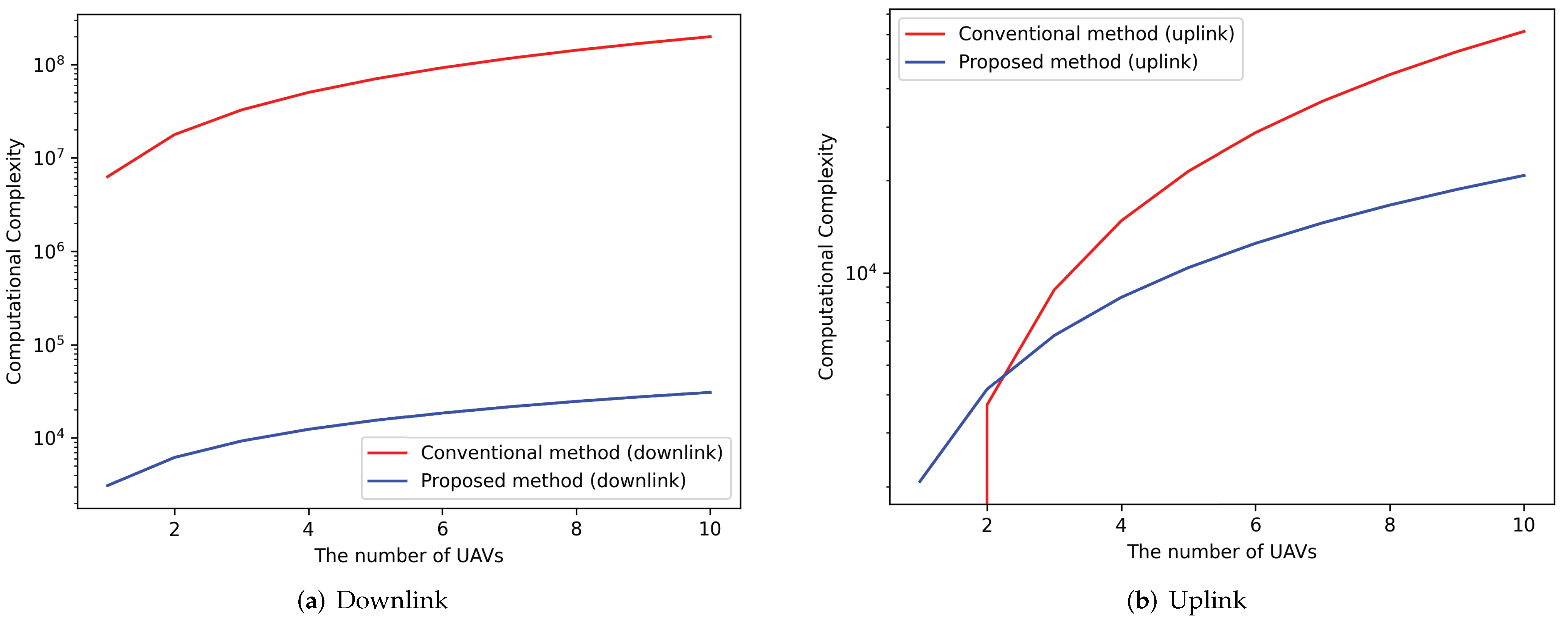
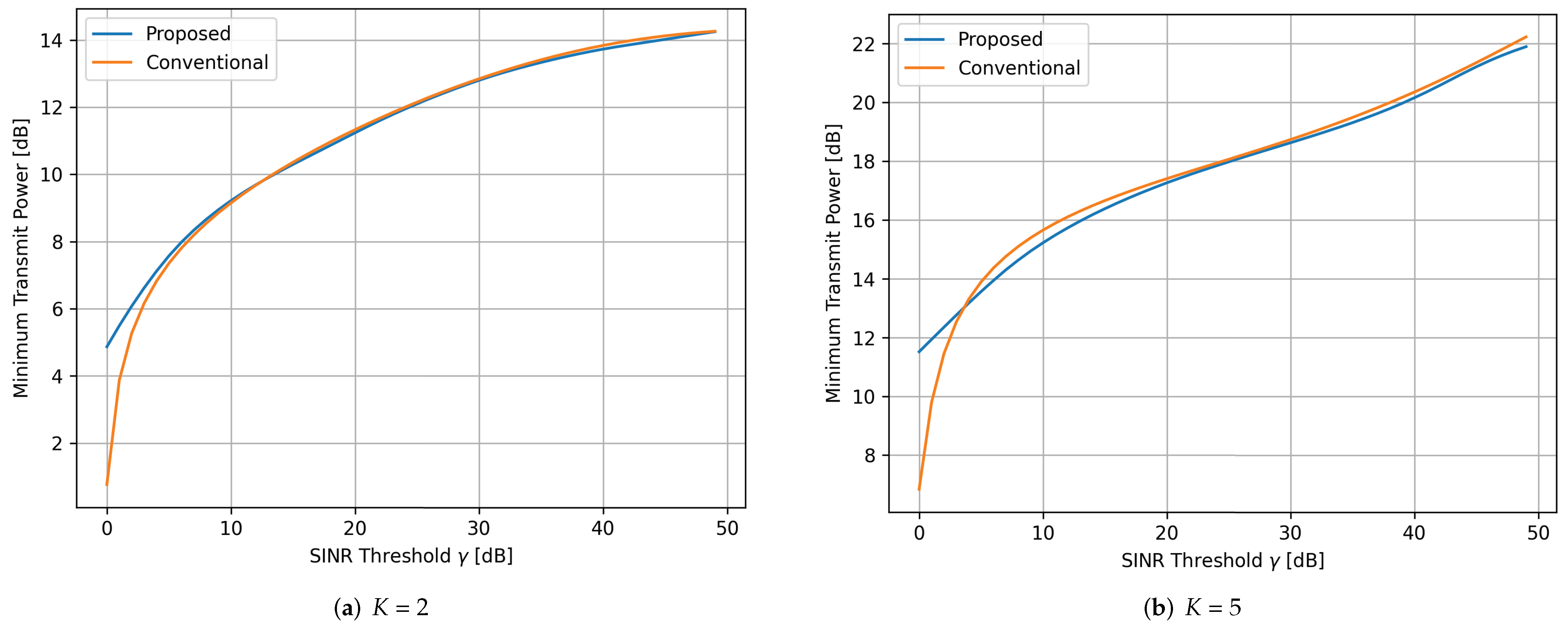
3. Numerical Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| Adam | Adaptive Moment Estimation |
| BS | Base Station |
| CSI | Channel State Information |
| DL | Deep Learning |
| DNN | Deep Neural Network |
| ELU | Exponential Linear Unit |
| IoT | Internet of Things |
| LoRa | Long Range |
| LP | Linear Programming |
| LPWAN | Low-Power Wide-Area Network |
| MSE | Mean Squared Error |
| NAG | Nesterov Accelerated Gradient |
| QoS | Quality of Service |
| SF | Spreading Factor |
| SINR | Signal-to-Interference-plus-Noise Ratio |
| SOCP | Second-Order Cone Programming |
| UAV | Unmanned Aerial Vehicle |
References
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.; Dou, Z.; Almaita, E.; Khalil, I.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned aerial vehicles (UAVs): A survey on civil applications and key research challenges. IEEE Access 2019, 7, 48572–48634. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R.; Lim, T.J. Wireless communications with unmanned aerial vehicles: Opportunities and challenges. IEEE Commun. Mag. 2016, 54, 36–42. [Google Scholar] [CrossRef] [Green Version]
- Mozaffari, M.; Saad, W.; Bennis, M.; Nam, Y.H.; Debbah, M. A tutorial on UAVs for wireless networks: Applications, challenges, and open problems. IEEE Commun. Surv. Tutor. 2019, 21, 2334–2360. [Google Scholar] [CrossRef] [Green Version]
- Augustin, A.; Yi, J.; Clausen, T.; Townsley, W.M. A study of LoRa: Long range & low power networks for the internet of things. Sensors 2016, 16, 1466. [Google Scholar]
- Raza, U.; Kulkarni, P.; Sooriyabandara, M. Low power wide area networks: An overview. IEEE Commun. Surv. Tutor. 2017, 19, 855–873. [Google Scholar] [CrossRef] [Green Version]
- Kang, J.M.; Lim, D.W.; Kang, K.M. On the LoRa Modulation for IoT: Optimal Preamble Detection and Its Performance Analysis. IEEE Internet Things J. 2021, 9, 4973–4986. [Google Scholar] [CrossRef]
- Yu, W.; Lan, T. Transmitter optimization for the multi-antenna downlink with per-antenna power constraints. IEEE Trans. Signal Process. 2007, 55, 2646–2660. [Google Scholar] [CrossRef] [Green Version]
- Zhu, J.; Wang, J.; Huang, Y.; Navaie, K.; Ding, Z.; Yang, L. On optimal beamforming design for downlink MISO NOMA systems. IEEE Trans. Veh. Technol. 2020, 69, 3008–3020. [Google Scholar] [CrossRef]
- Huang, Y.; Zhou, L. MISO NOMA downlink beamforming optimization with per-antenna power constraints. Signal Process. 2021, 179, 107828. [Google Scholar] [CrossRef]
- Van Chien, T.; Björnson, E.; Larsson, E.G. Joint power allocation and user association optimization for massive MIMO systems. IEEE Trans. Wirel. Commun. 2016, 15, 6384–6399. [Google Scholar] [CrossRef] [Green Version]
- Zuo, H.; Tao, X. Power allocation optimization for uplink non-orthogonal multiple access systems. In Proceedings of the 2017 9th International Conference on Wireless Communications and Signal Processing (WCSP), Nanjing, China, 11–13 October 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Tan, F.; Lv, T.; Yang, S. Power allocation optimization for energy-efficient massive MIMO aided multi-pair decode-and-forward relay systems. IEEE Trans. Commun. 2017, 65, 2368–2381. [Google Scholar]
- Huang, H.; Peng, Y.; Yang, J.; Xia, W.; Gui, G. Fast beamforming design via deep learning. IEEE Trans. Veh. Technol. 2019, 69, 1065–1069. [Google Scholar] [CrossRef]
- Luijten, B.; Cohen, R.; de Bruijn, F.J.; Schmeitz, H.A.; Mischi, M.; Eldar, Y.C.; van Sloun, R.J. Deep learning for fast adaptive beamforming. In Proceedings of the ICASSP 2019—2019 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Brighton, UK, 12–17 May 2019; pp. 1333–1337. [Google Scholar]
- Xie, B.; Yin, Y.; Xiong, J. Pushing the Limits of Long Range Wireless Sensing with LoRa. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2021, 5, 1–21. [Google Scholar] [CrossRef]
- Nguyen, T.T.; Nguyen, H.H.; Barton, R.; Grossetete, P. Efficient design of chirp spread spectrum modulation for low-power wide-area networks. IEEE Internet Things J. 2019, 6, 9503–9515. [Google Scholar] [CrossRef]
- Vangelista, L. Frequency Shift Chirp Modulation: The LoRa Modulation. IEEE Signal Process. Lett. 2017, 24, 1818–1821. [Google Scholar] [CrossRef]
- Chiani, M.; Elzanaty, A. On the LoRa Modulation for IoT: Waveform Properties and Spectral Analysis. IEEE Internet Things J. 2019, 6, 8463–8470. [Google Scholar] [CrossRef] [Green Version]
- Bernier, C.; Dehmas, F.; Deparis, N. Low complexity LoRa frame synchronization for ultra-low power software-defined radios. IEEE Trans. Commun. 2020, 68, 3140–3152. [Google Scholar] [CrossRef] [Green Version]
- Xhonneux, M.; Bol, D.; Louveaux, J. A low-complexity synchronization scheme for LoRa end nodes. arXiv 2019, arXiv:1912.11344. [Google Scholar]
- Ghanaatian, R.; Afisiadis, O.; Cotting, M.; Burg, A. LoRa digital receiver analysis and implementation. In Proceedings of the ICASSP 2019—2019 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Brighton, UK, 12–17 May 2019; pp. 1498–1502. [Google Scholar]
- Schubert, M.; Boche, H. Solution of the multiuser downlink beamforming problem with individual SINR constraints. IEEE Trans. Veh. Technol. 2004, 53, 18–28. [Google Scholar] [CrossRef]
- Björnson, E.; Bengtsson, M.; Ottersten, B. Optimal Multiuser Transmit Beamforming: A Difficult Problem with a Simple Solution Structure [Lecture Notes]. IEEE Signal Process. Mag. 2014, 31, 142–148. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Jiang, M.; Zhang, Q.; Qin, J. Joint beamforming design in multi-cluster MISO NOMA reconfigurable intelligent surface-aided downlink communication networks. IEEE Trans. Commun. 2020, 69, 664–674. [Google Scholar] [CrossRef]
- Luo, Z.Q.; Yu, W. An introduction to convex optimization for communications and signal processing. IEEE J. Sel. Areas Commun. 2006, 24, 1426–1438. [Google Scholar]
- Morin, T.; Prabhu, N.; Zhang, Z. Complexity of the gravitational method for linear programming. J. Optim. Theory Appl. 2001, 108, 633–658. [Google Scholar] [CrossRef]
- Freire, P.J.; Osadchuk, Y.; Spinnler, B.; Napoli, A.; Schairer, W.; Costa, N.; Prilepsky, J.E.; Turitsyn, S.K. Performance versus complexity study of neural network equalizers in coherent optical systems. J. Light. Technol. 2021, 39, 6085–6096. [Google Scholar] [CrossRef]
- Clevert, D.A.; Unterthiner, T.; Hochreiter, S. Fast and accurate deep network learning by exponential linear units (elus). arXiv 2015, arXiv:1511.07289. [Google Scholar]
- Bengio, Y.; Simard, P.; Frasconi, P. Learning long-term dependencies with gradient descent is difficult. IEEE Trans. Neural Netw. 1994, 5, 157–166. [Google Scholar] [CrossRef]
- Lu, L.; Shin, Y.; Su, Y.; Karniadakis, G.E. Dying relu and initialization: Theory and numerical examples. arXiv 2019, arXiv:1903.06733. [Google Scholar] [CrossRef]
- Ruder, S. An overview of gradient descent optimization algorithms. arXiv 2016, arXiv:1609.04747. [Google Scholar]
- Botev, A.; Lever, G.; Barber, D. Nesterov’s accelerated gradient and momentum as approximations to regularised update descent. In Proceedings of the 2017 International Joint Conference on Neural Networks (IJCNN), Anchorage, AK, USA, 14–19 May 2017; pp. 1899–1903. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Grant, M.; Boyd, S. CVX: Matlab Software for Disciplined Convex Programming, Version 2.1; 2014. Available online: http://cvxr.com/cvx/citing/ (accessed on 17 April 2022).
- Srivastava, N.; Hinton, G.; Krizhevsky, A.; Sutskever, I.; Salakhutdinov, R. Dropout: A simple way to prevent neural networks from overfitting. J. Mach. Learn. Res. 2014, 15, 1929–1958. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Conventional Scheme (Uplink) | Proposed Scheme | |
|---|---|---|
| 448 | 7104 | |
| 1793 | 7872 | |
| 11,097 | 12,544 | |
| 44,389 | 16,640 | |
| 245,760 | 31,040 | |
| 983,040 | 51,520 |
| Conventional Scheme (Downlink) | Proposed Scheme | |
|---|---|---|
| 22,574 | 56,832 | |
| 361,192 | 125,952 | |
| 8,897,462 | 401,408 | |
| 142,359,398 | 1,064,960 | |
| 3,183,252,921 | 3,973,120 | |
| 50,930,046,742 | 13,189,120 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, Y.-R.; Park, J.-H.; Kang, J.-M.; Lim, D.-W.; Kang, K.-M. Deep Learning-Aided Downlink Beamforming Design and Uplink Power Allocation for UAV Wireless Communications with LoRa. Appl. Sci. 2022, 12, 4826. https://doi.org/10.3390/app12104826
Kim Y-R, Park J-H, Kang J-M, Lim D-W, Kang K-M. Deep Learning-Aided Downlink Beamforming Design and Uplink Power Allocation for UAV Wireless Communications with LoRa. Applied Sciences. 2022; 12(10):4826. https://doi.org/10.3390/app12104826
Chicago/Turabian StyleKim, Yeong-Rok, Jun-Hyun Park, Jae-Mo Kang, Dong-Woo Lim, and Kyu-Min Kang. 2022. "Deep Learning-Aided Downlink Beamforming Design and Uplink Power Allocation for UAV Wireless Communications with LoRa" Applied Sciences 12, no. 10: 4826. https://doi.org/10.3390/app12104826
APA StyleKim, Y.-R., Park, J.-H., Kang, J.-M., Lim, D.-W., & Kang, K.-M. (2022). Deep Learning-Aided Downlink Beamforming Design and Uplink Power Allocation for UAV Wireless Communications with LoRa. Applied Sciences, 12(10), 4826. https://doi.org/10.3390/app12104826