
A Novel Approach to Determine Static Falling down Sidelong Angle of Tractor Using a 3D Printed Miniature Model




Abstract
:1. Introduction
2. Materials and Methods
2.1. Tractor Used for Testing
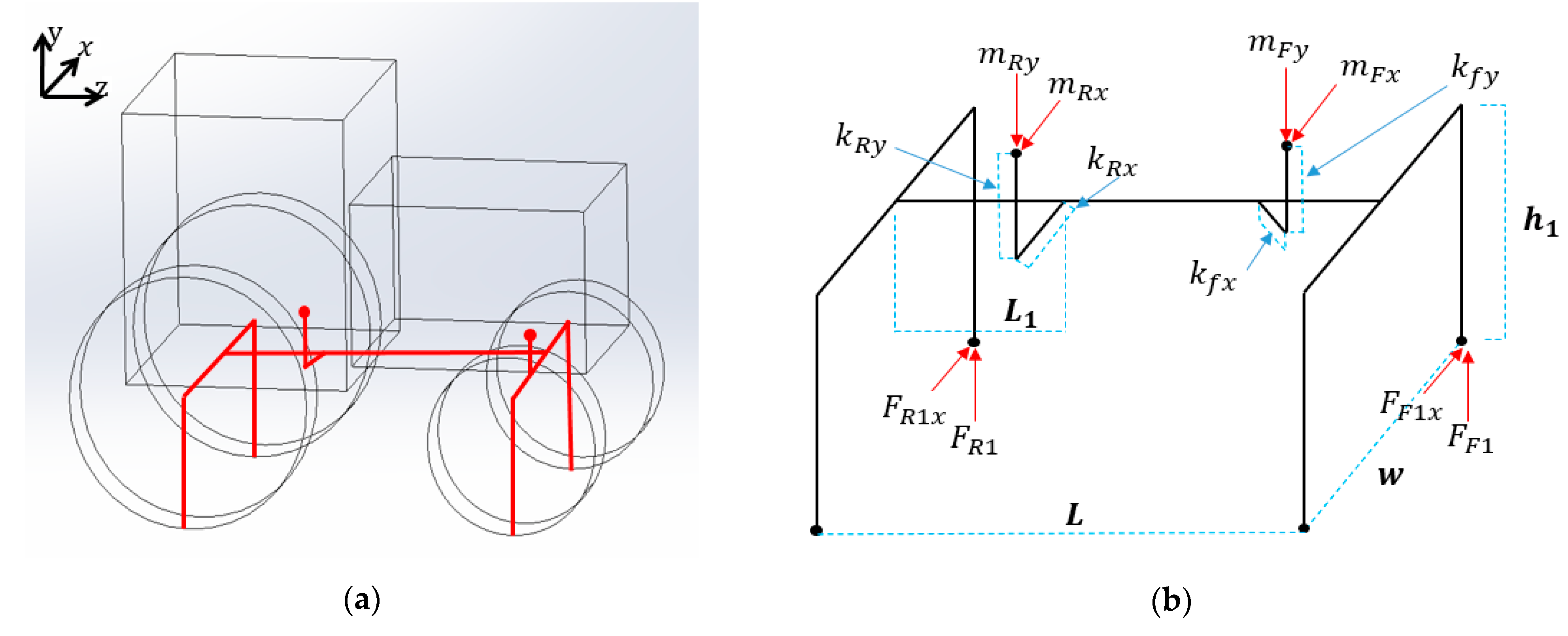
2.2. Theoretical Analysis of the Miniature Model’s Static Falling down Sidelong Angle
- -
- The subject of the analysis is a four-wheel-drive tractor; hence, the weight of the front axle and front wheels cannot be ignored.
- -
- The slope angle increases quasi-statically (ignoring the dynamic effect), and the tire makes point contact with the ground.
- -
- The track widths of the front wheels and rear wheels are the same.
- -
- Slip does not occur between the tire and the ground, and the tire stiffness is ignored.
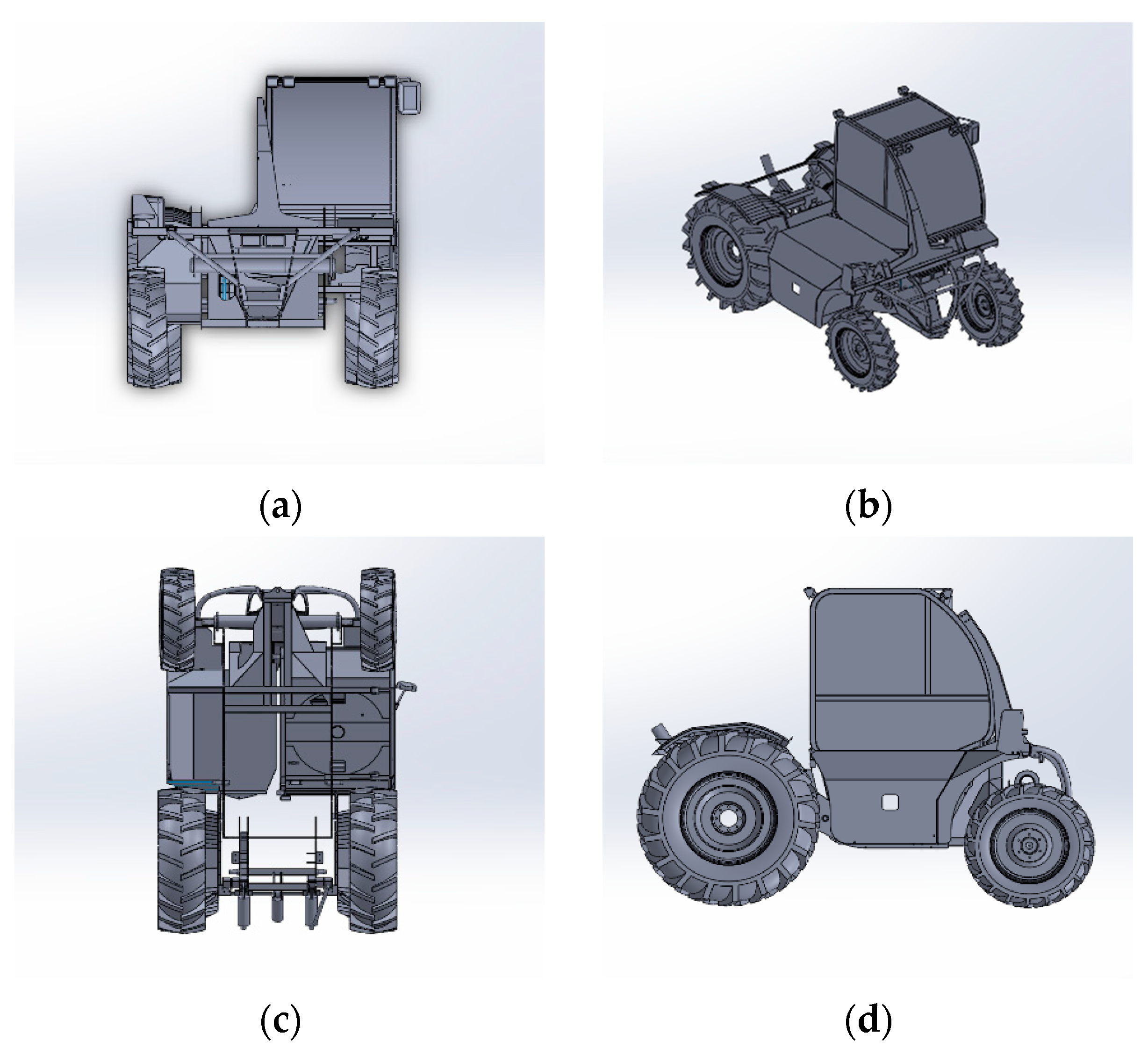
2.3. Miniature Model of the Tractor
2.3.1. Making of the Miniature Model Using a 3D Printer
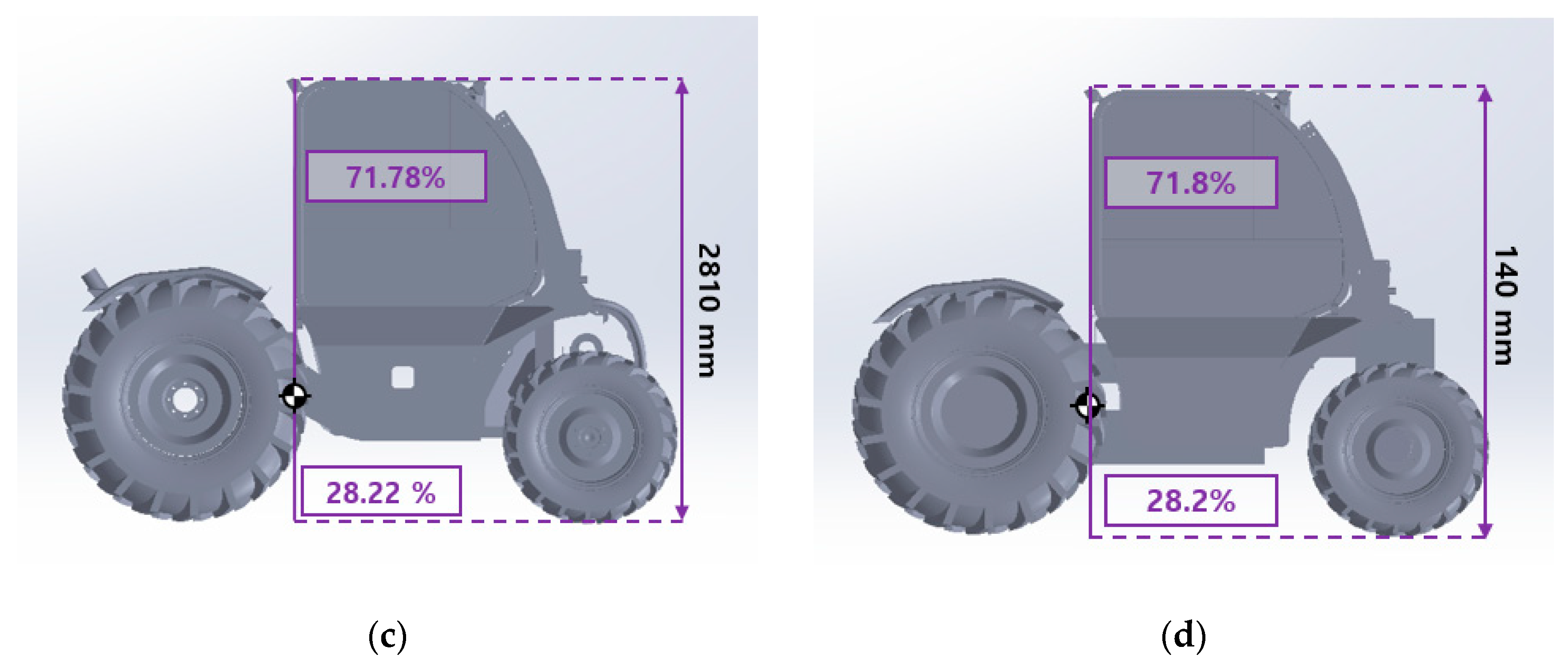
2.3.2. Verification of the Miniature Model
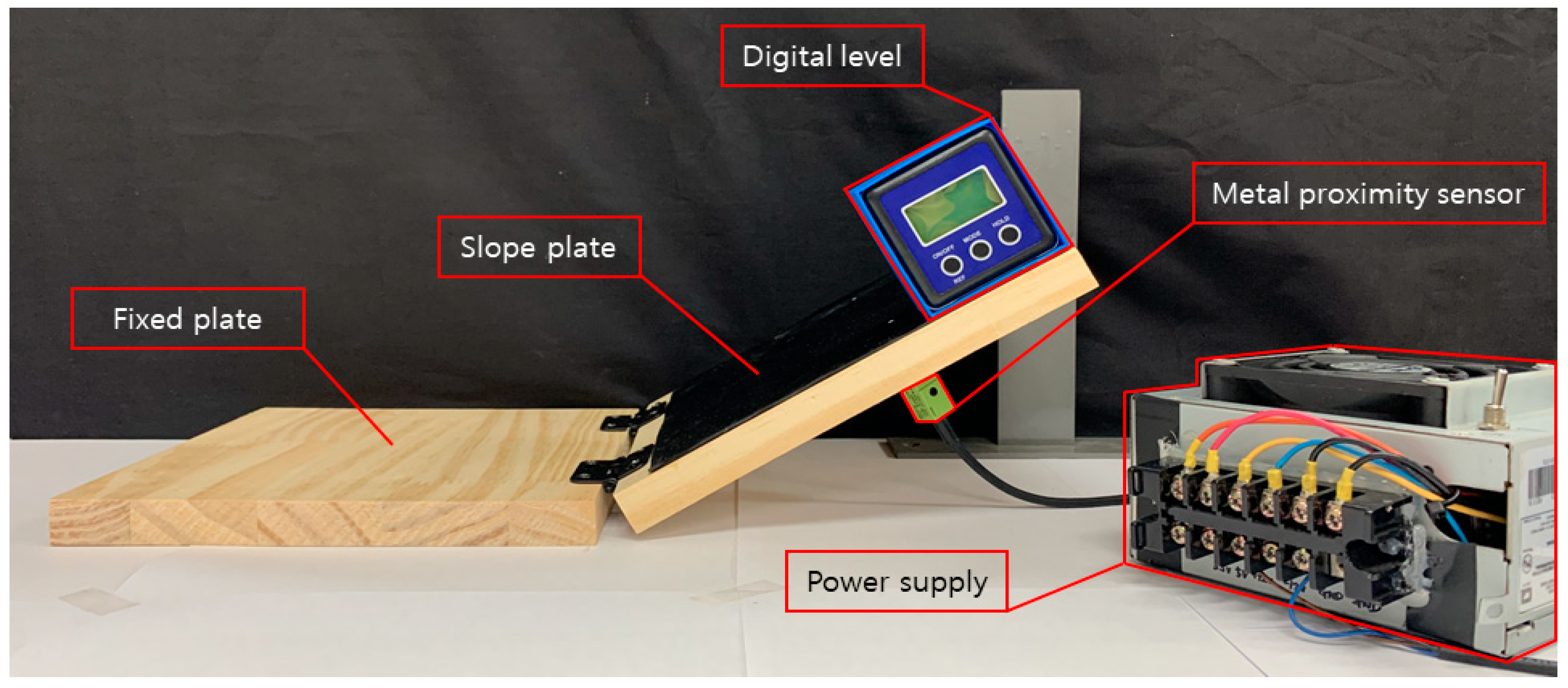
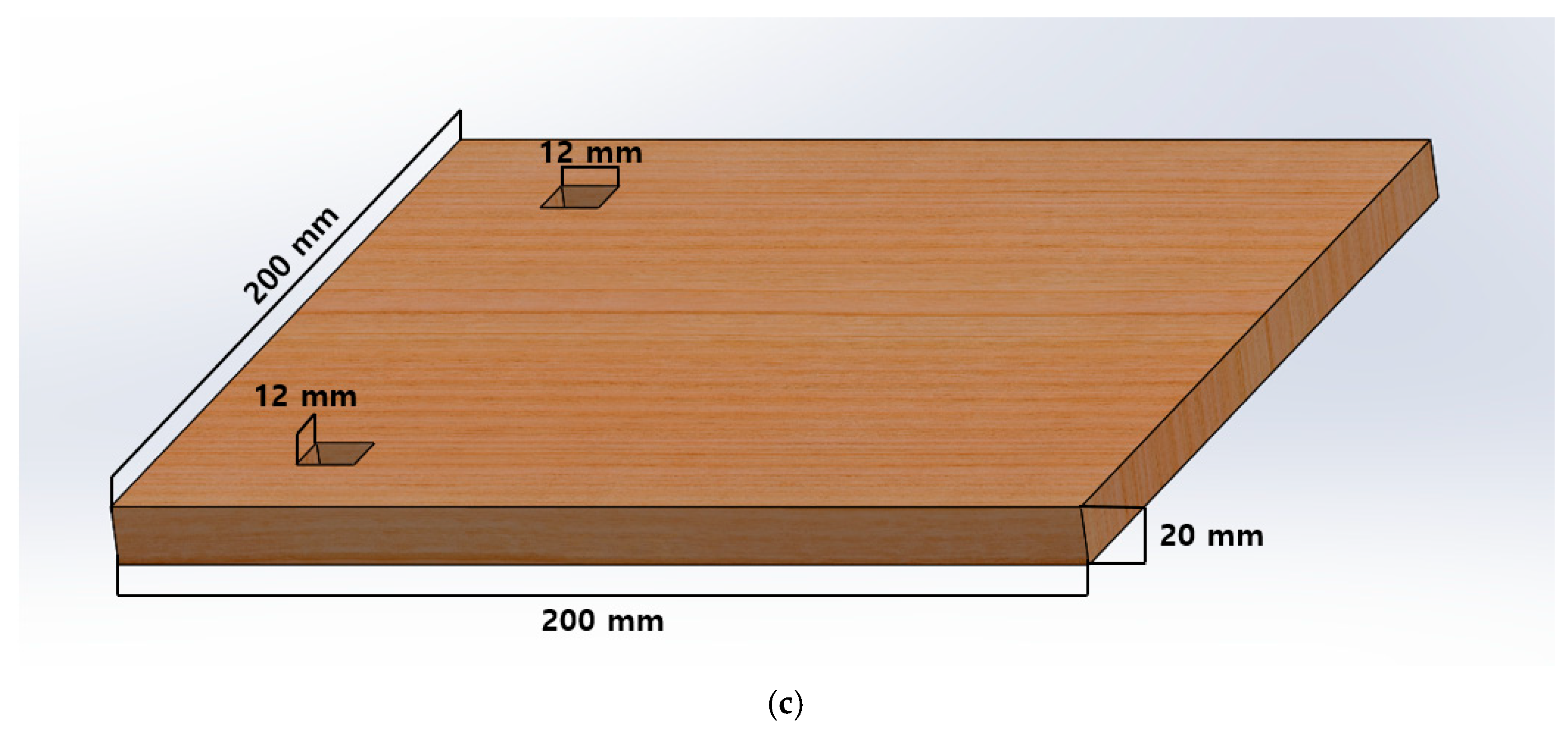
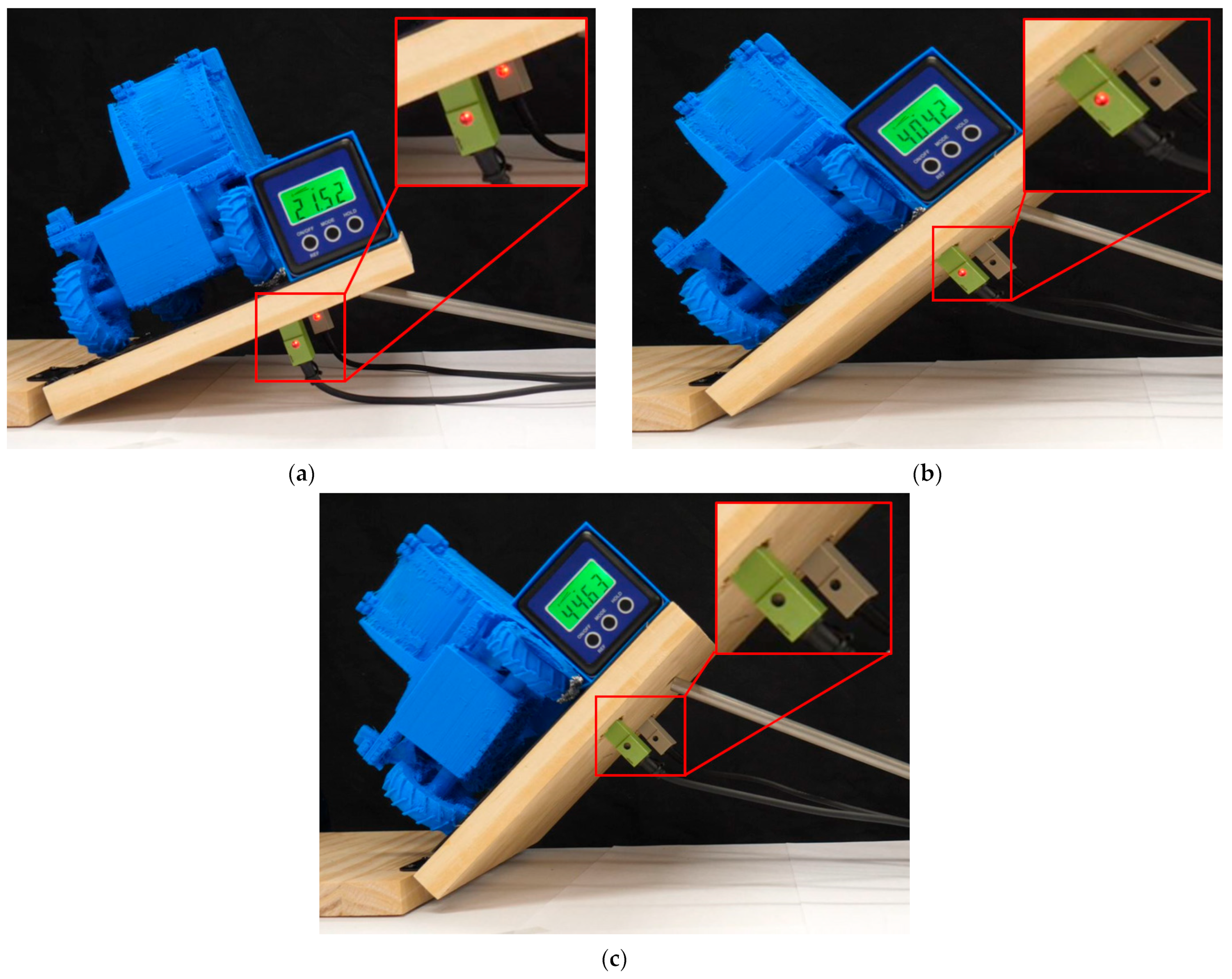
2.4. Test Platform Setup
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Jeong, B.Y.; Kim, Y.H. Ergonomic Guidelines and Intervention Procedures for Farm Workers. J. Ergon. Soc. Korea 2011, 30, 443–450. [Google Scholar] [CrossRef]
- Ali, M.; Lee, Y.S.; Kabir, M.S.N.; Kang, T.K.; Lee, S.H.; Chung, S.O. Kinematic analysis for design of the transportation part of a tractor-mounted Chinese cabbage collector. J. Biosyst. Eng. 2019, 44, 226–235. [Google Scholar] [CrossRef]
- Hyun, D.Y. Computer Simulation of Sideways Overturning of Agricultural Tractors. Ph.D. Thesis, Seoul National University, Suwon, Korea, 1987. [Google Scholar]
- Rural Development Administration. 2012 Agricultural Machinery Safety Accident. 2013. Available online: http://www.nongsaro.go.kr/portal/ps/psb/psbk/kidofcomdtyDtl.ps?menuId=PS00067&kidofcomdtyNo=28785 (accessed on 7 November 2017). (In Korean)
- Rondelli, V.; Casazza, C.; Martelli, R. Tractor rollover fatalities, analyzing accident scenario. J. Saf. Res. 2018, 67, 99–106. [Google Scholar] [CrossRef] [PubMed]
- Ministry of Agriculture, Forestry and Fisheries. Outline of Fatal Accidents during Farm Work in 2015. 2017. Available online: http://www.maff.go.jp/j/seisan/sien/sizai/s_kikaika/anzen/pdf/sibou24.pdf (accessed on 21 May 2017). (In Japanese)
- Abubakar, M.S.; Ahmad, D.; Akande, F.B. A review of farm tractor overturning accidents and safety. Pertanika J. Sci. Technol. 2010, 18, 377–385. [Google Scholar]
- Kim, K.U.; Hong, J.P. Modeling Static Stability of Agricultural Tractor. In Proceedings of the Korean Society for Agricultural Machinery Conference, Seoul, Korea, 19–22 October 1993; pp. 1127–1136. [Google Scholar]
- Guzzomi, A.L. A revised kineto-static model for Phase I tractor rollover. Biosyst. Eng. 2012, 113, 65–75. [Google Scholar] [CrossRef]
- Baker, V.; Guzzomi, A.L. A model and comparison of 4-wheel-drive fixed-chassis tractor rollover during Phase I. Biosyst. Eng. 2013, 116, 179–189. [Google Scholar] [CrossRef]
- Li, Z.; Mitsuoka, M.; Inoue, E.; Okayasu, T.; Hirai, Y.; Zhu, Z. Prediction of tractor sideslipping behavior using a quasi-static model. J. Fac. Agric. Kyushu Univ. 2015, 60, 215–218. [Google Scholar] [CrossRef]
- Kim, Y.Y.; Noh, J.S.; Shin, S.Y.; Kim, B.I.; Hong, S.J. Improved method for determining the height of center of gravity of agricultural tractors. J. Biosyst. Eng. 2016, 41, 170–176. [Google Scholar] [CrossRef]
- Kang, N.R.; Choi, I.S.; Lee, W.J.; Woo, J.K.; Kim, Y.K.; Choi, Y.; Hyun, C.S.; Yoo, S.N. Sideways overturning and overturning angle test for a three-wheel riding-type cultivator. J. Biosyst. Eng. 2019, 44, 12–17. [Google Scholar] [CrossRef]
- Bietresato, M.; Mazzetto, F. Stability tests of agricultural and operating machines by means of an installation composed by a rotating platform (the “turntable”) with four weighting quadrants. Appl. Sci. 2020, 10, 3786. [Google Scholar] [CrossRef]
- Park, W.K.; Kim, K.U.; Kim, J.W.; Song, T.Y.; Park, M.S.; Cho, K.H. Sideways overturning analysis of forwarder using a multibody dynamics analysis program. J. Biosyst. Eng. 2002, 27, 185–194. [Google Scholar] [CrossRef]
- Demšar, I.; Bernik, R.; Duhovnik, J. A mathematical model and numerical simulation of the static stability of a tractor. Agric. Conspec. Sci. 2012, 77, 143–150. [Google Scholar]
- Choi, K.H.; Kim, S.M.; Hong, S.H. Analysis of static stability by modified mathematical model for asymmetric tractor-harvester system: Changes in lateral overturning angle by movement of center of gravity coordinates. J. Biosyst. Eng. 2017, 42, 127–135. [Google Scholar] [CrossRef]
- Lysych, M.N. A study of the static lateral stability of a tillage machine-tractor unit on a virtual stand. J. Phys. Conf. Ser. 2020, 1515, 042033. [Google Scholar] [CrossRef]
- Lysych, M.N. Study driving dynamics of the machine-tractor unit on a virtual stand with obstacles. J. Phys. Conf. Ser. 2020, 1515, 042079. [Google Scholar] [CrossRef]
- Carson, J.S. Introduction to modeling and simulation. In Proceedings of the 2005 Winter Simulation Conference, Orlando, FL, USA, 4 December 2005; p. 8. [Google Scholar] [CrossRef]
- Calle, M.A.; Salmi, M.; Mazzariol, L.M.; Kujala, P. Miniature reproduction of raking tests on marine structure: Similarity technique and experiment. Eng. Struct. 2020, 212, 110527. [Google Scholar] [CrossRef] [Green Version]
- Hwang, S.J.; Jang, M.K.; Nam, J.S. Application of lateral overturning and backward rollover analysis in a multi-purpose agricultural machine developed in south korea. Agronomy 2021, 11, 297. [Google Scholar] [CrossRef]
- Ahn, Y.S.; Baek, W.K. Thrust simulation and experiments for underwater thrusters. J. Korean Soc. Power Syst. Eng. 2017, 21, 51–59. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Specification | |
|---|---|---|
| Model | RT135 | |
| Manufacturer, Nation | DaeHo, Korea | |
| Length/Width/Height (mm) | 4080/2345/2810 | |
| Weight (N) | 46,300 | |
| Engine | Rated power (kW)/Speed (rpm) | 95.6/2250 |
| Minimum ground clearance (mm) | 374 | |
| Traveling speed | Minimum (km/h) | 1.86 |
| Maximum (km/h) | 48.81 | |
| Minimum turning radius (mm) | 3.06 | |
| Static falling down sidelong angle (°) | 45.3 | |
| Overall Dimensions (Length/Width/Height (mm)) | Weight (g) |
|---|---|
| 204/117/140 | 280.5 |
| Original Model (%) | Miniature Model (%) | Difference (%) | |
|---|---|---|---|
| Front wheels | 45.9 | 45.7 | 0.2 |
| Rear wheels | 54.1 | 54.3 |
| Items | Specification |
|---|---|
| Model | PS12-4DN |
| Manufacturer, Nation | AUTONICS, Korea |
| Measuring range (mm) | 4 |
| Standard detector (mm) | 12 × 12 × 1 (Metal) |
| Accuracy | Within 10% of detection distance |
| Items | Specification |
|---|---|
| Model | Advanced digital level |
| Manufacturer, Nation | YATO, Korea |
| Measuring range (°) | 360 |
| Resolution (°) | 0.01 |
| Accuracy (°) | ±0.1 |
| Precision (°) | ±0.1 |
| Test No. | Instability Angle (°) | |
|---|---|---|
| Upslope Front Wheel | Upslope Rear Wheel | |
| 1 | 45.0 | 41.0 |
| 2 | 44.1 | 40.7 |
| 3 | 44.1 | 41.9 |
| 4 | 44.6 | 40.4 |
| 5 | 43.8 | 39.9 |
| Avg. ± Std. | 44.3 ± 0.5 | 40.8 ± 0.7 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jang, M.-K.; Hwang, S.-J.; Shin, C.-S.; Nam, J.-S. A Novel Approach to Determine Static Falling down Sidelong Angle of Tractor Using a 3D Printed Miniature Model. Appl. Sci. 2022, 12, 43. https://doi.org/10.3390/app12010043
Jang M-K, Hwang S-J, Shin C-S, Nam J-S. A Novel Approach to Determine Static Falling down Sidelong Angle of Tractor Using a 3D Printed Miniature Model. Applied Sciences. 2022; 12(1):43. https://doi.org/10.3390/app12010043
Chicago/Turabian StyleJang, Moon-Kyeong, Seok-Joon Hwang, Chang-Seop Shin, and Ju-Seok Nam. 2022. "A Novel Approach to Determine Static Falling down Sidelong Angle of Tractor Using a 3D Printed Miniature Model" Applied Sciences 12, no. 1: 43. https://doi.org/10.3390/app12010043
APA StyleJang, M.-K., Hwang, S.-J., Shin, C.-S., & Nam, J.-S. (2022). A Novel Approach to Determine Static Falling down Sidelong Angle of Tractor Using a 3D Printed Miniature Model. Applied Sciences, 12(1), 43. https://doi.org/10.3390/app12010043