
A Supervised Neural Network Control for Magnetorheological Damper in an Aircraft Landing Gear


Abstract
:1. Introduction
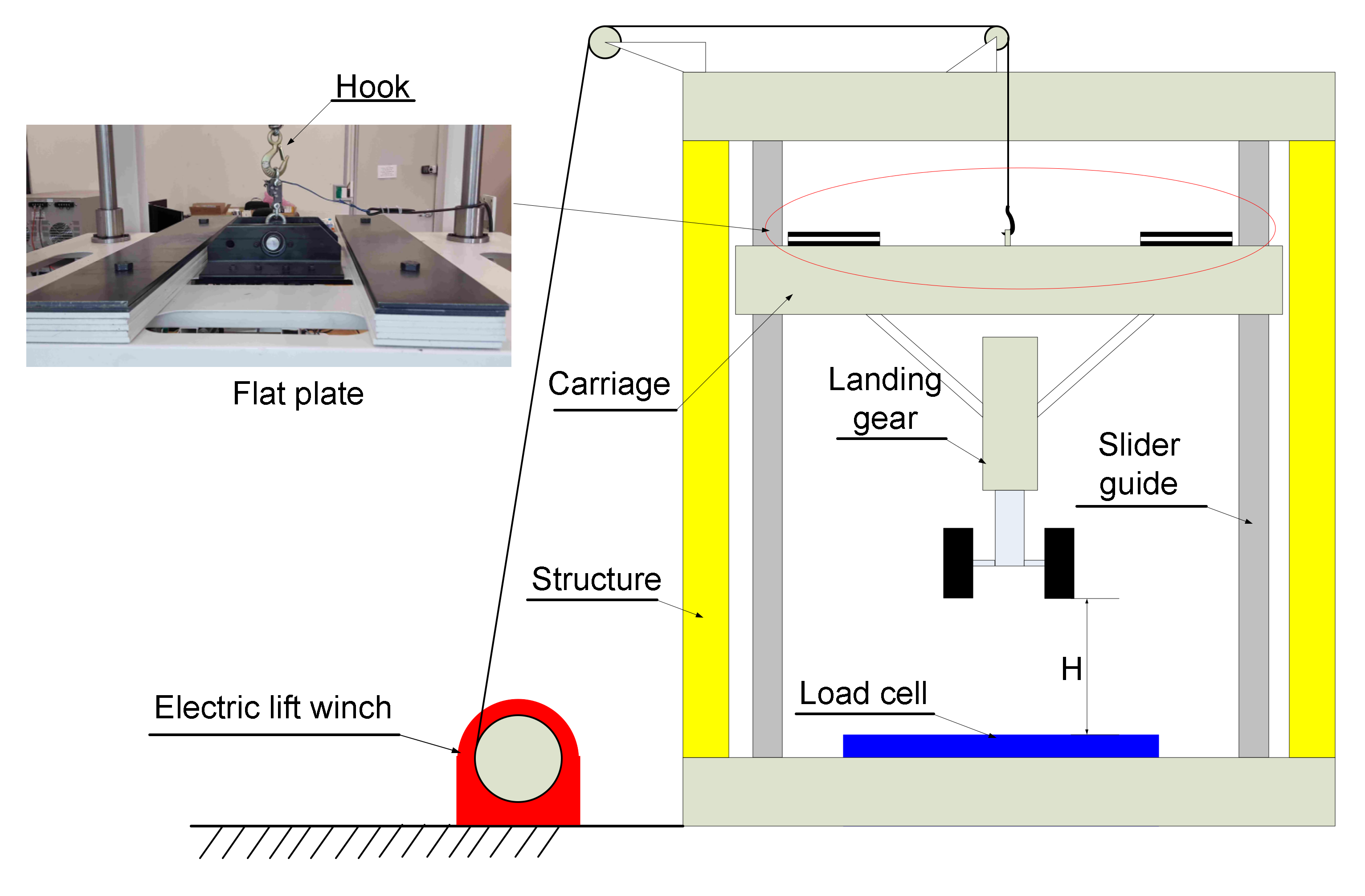
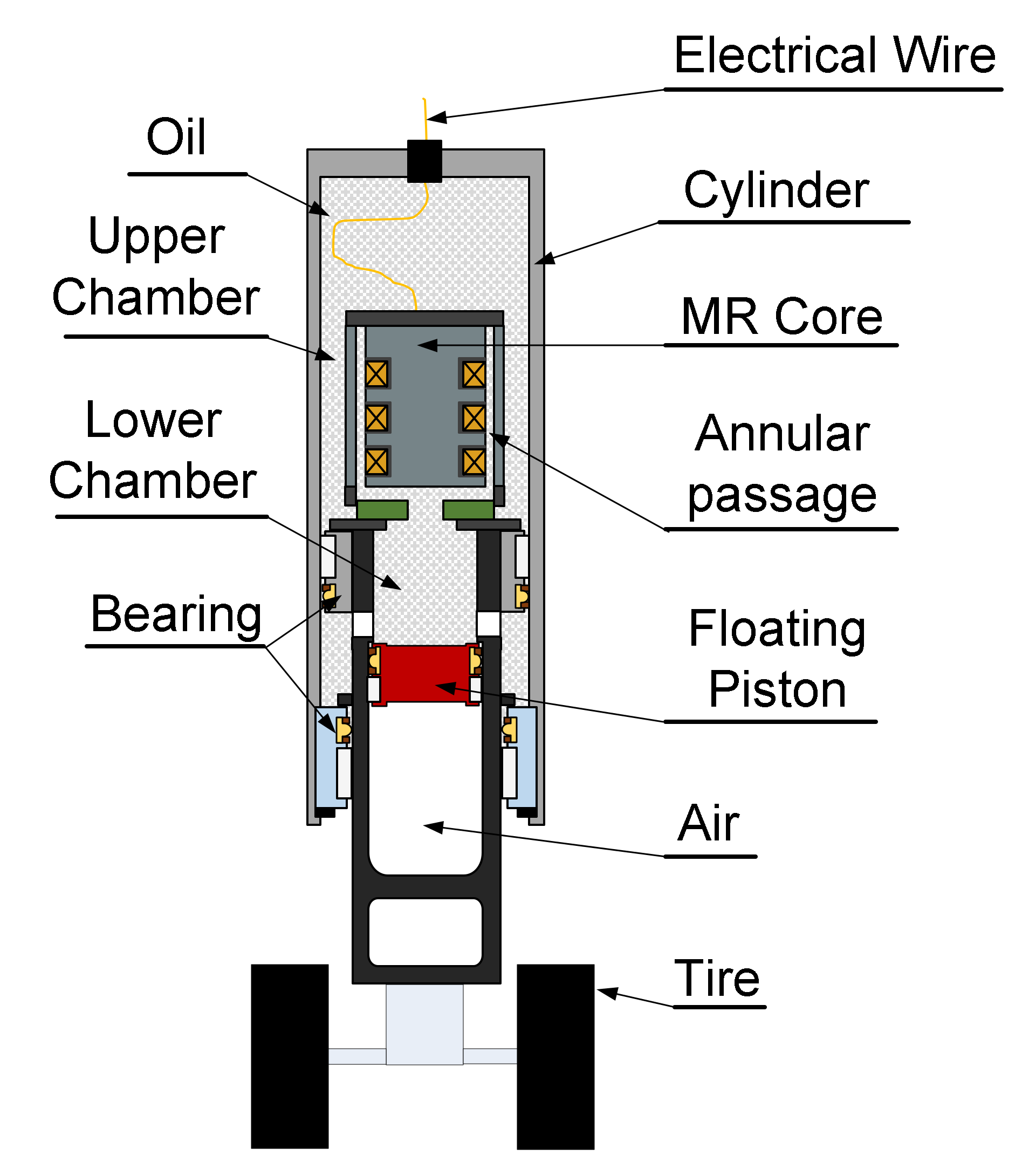
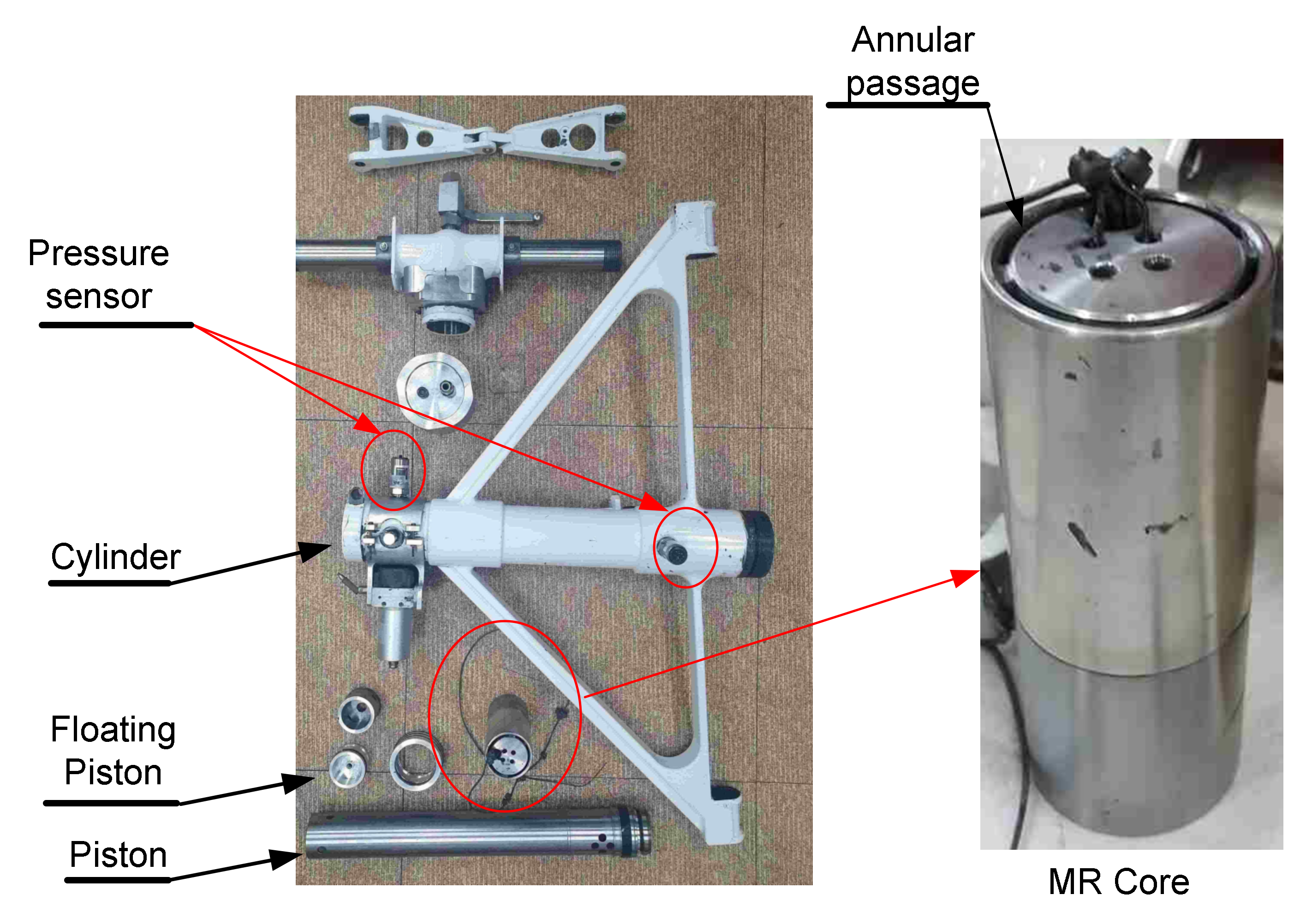
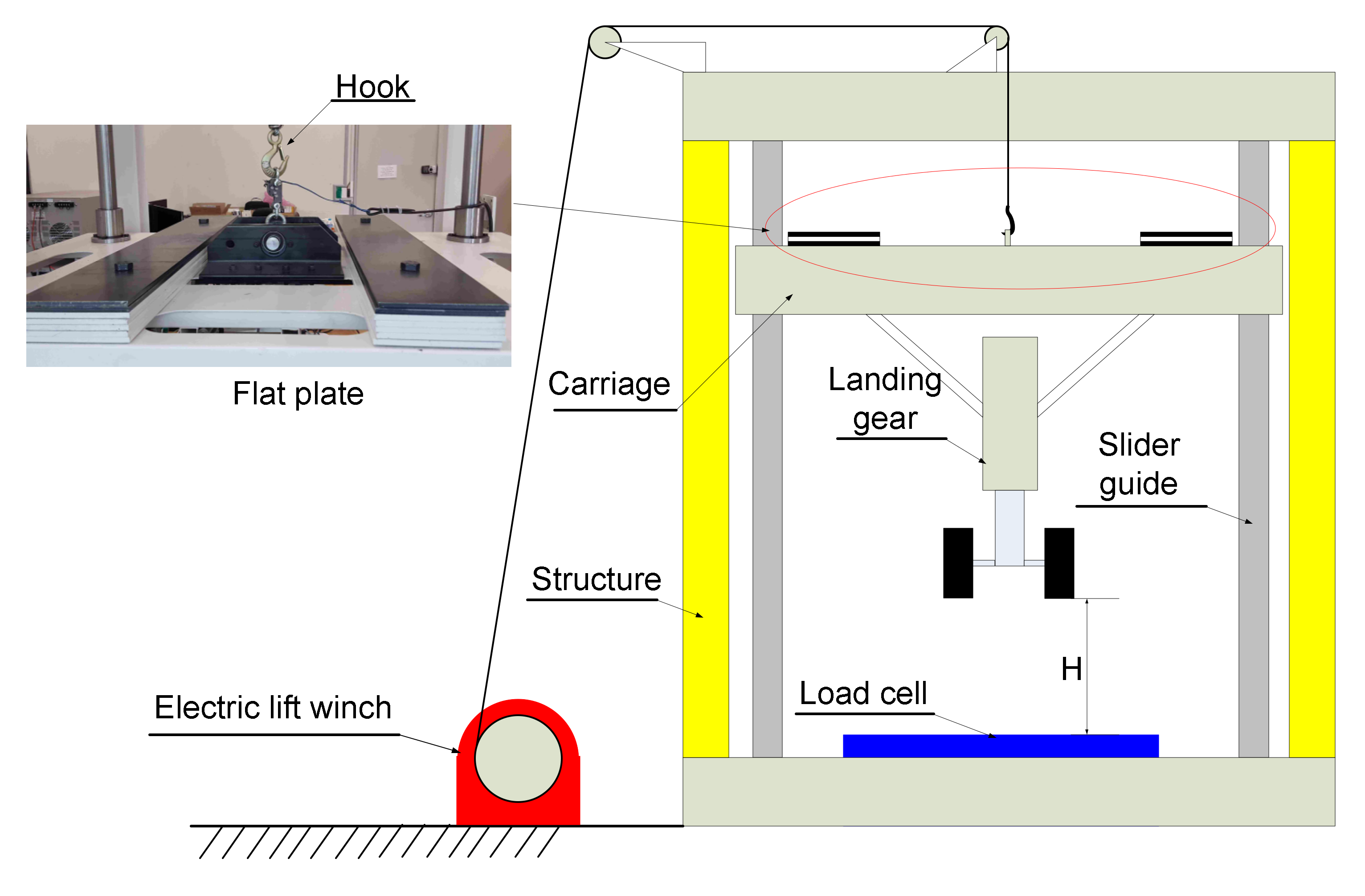
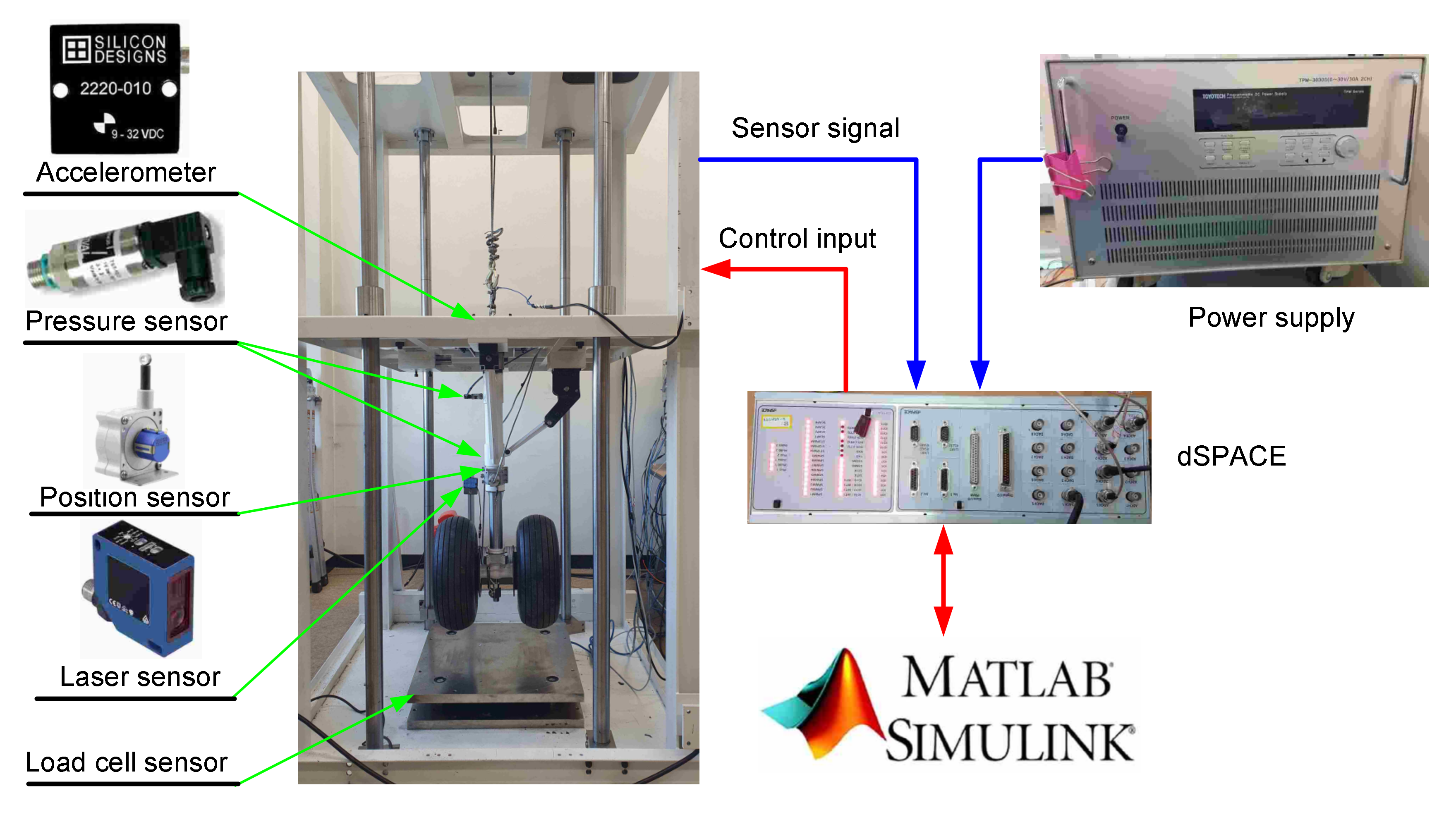
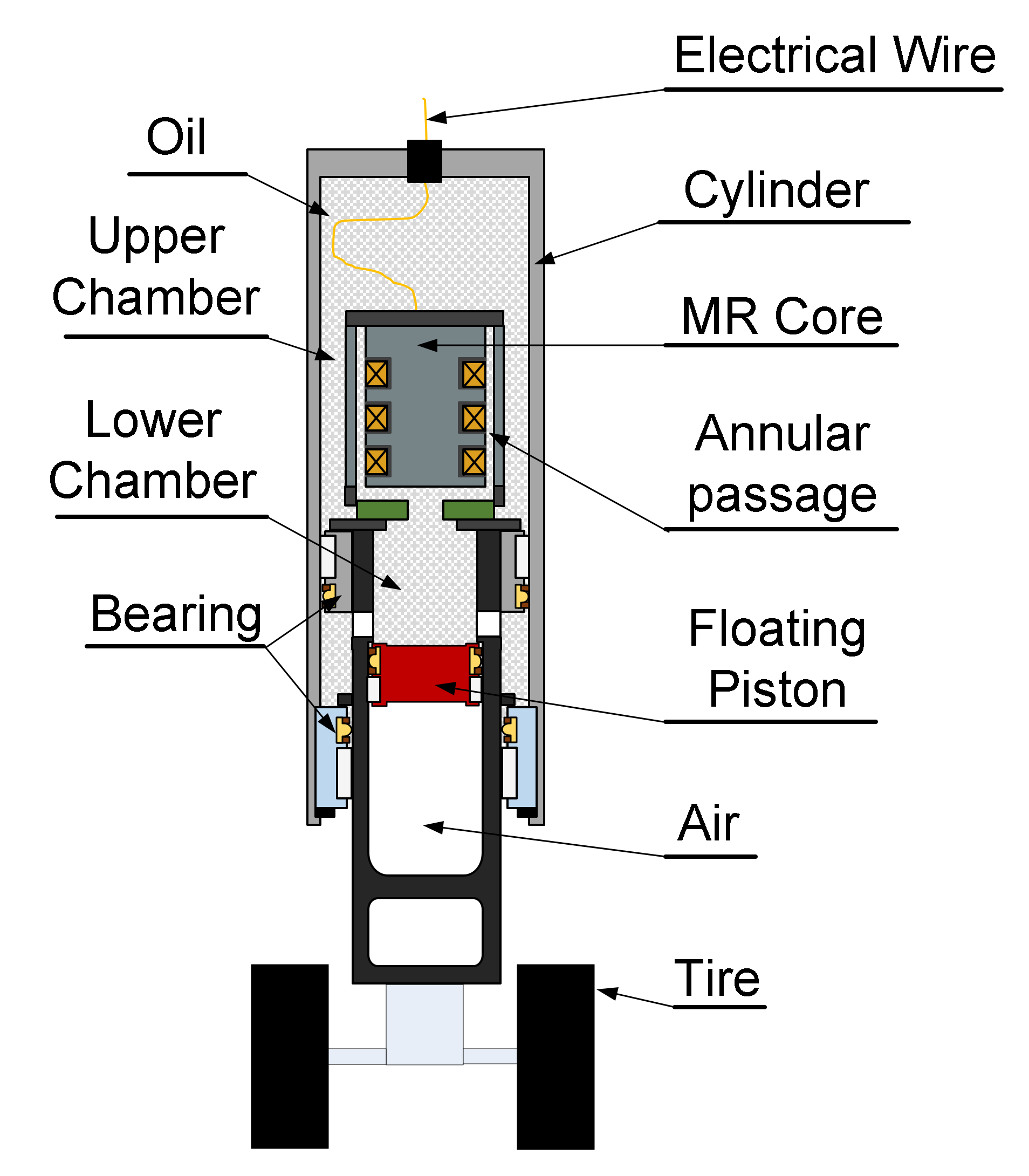
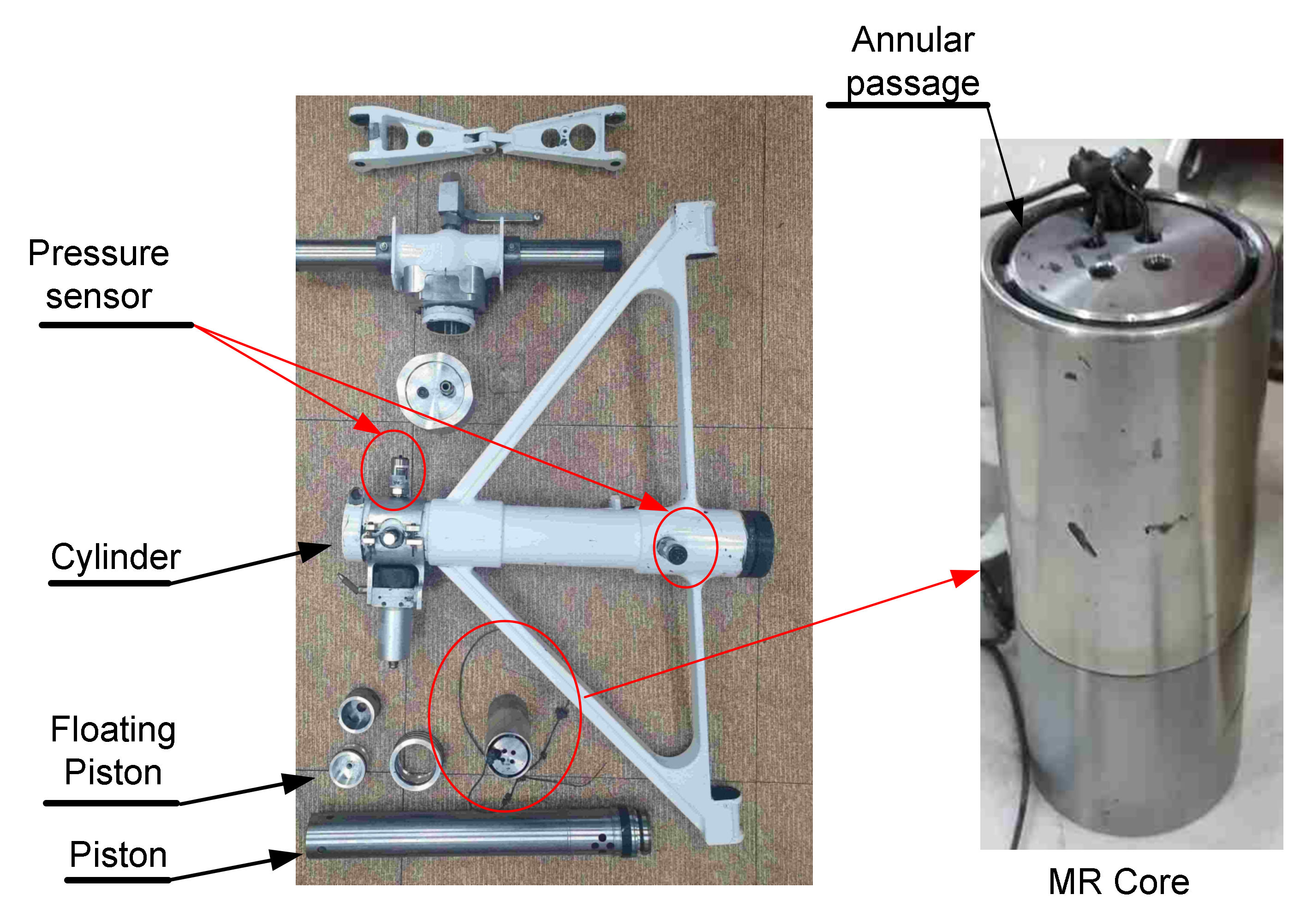
2. Drop Test Environment of MR Damper Landing Gear
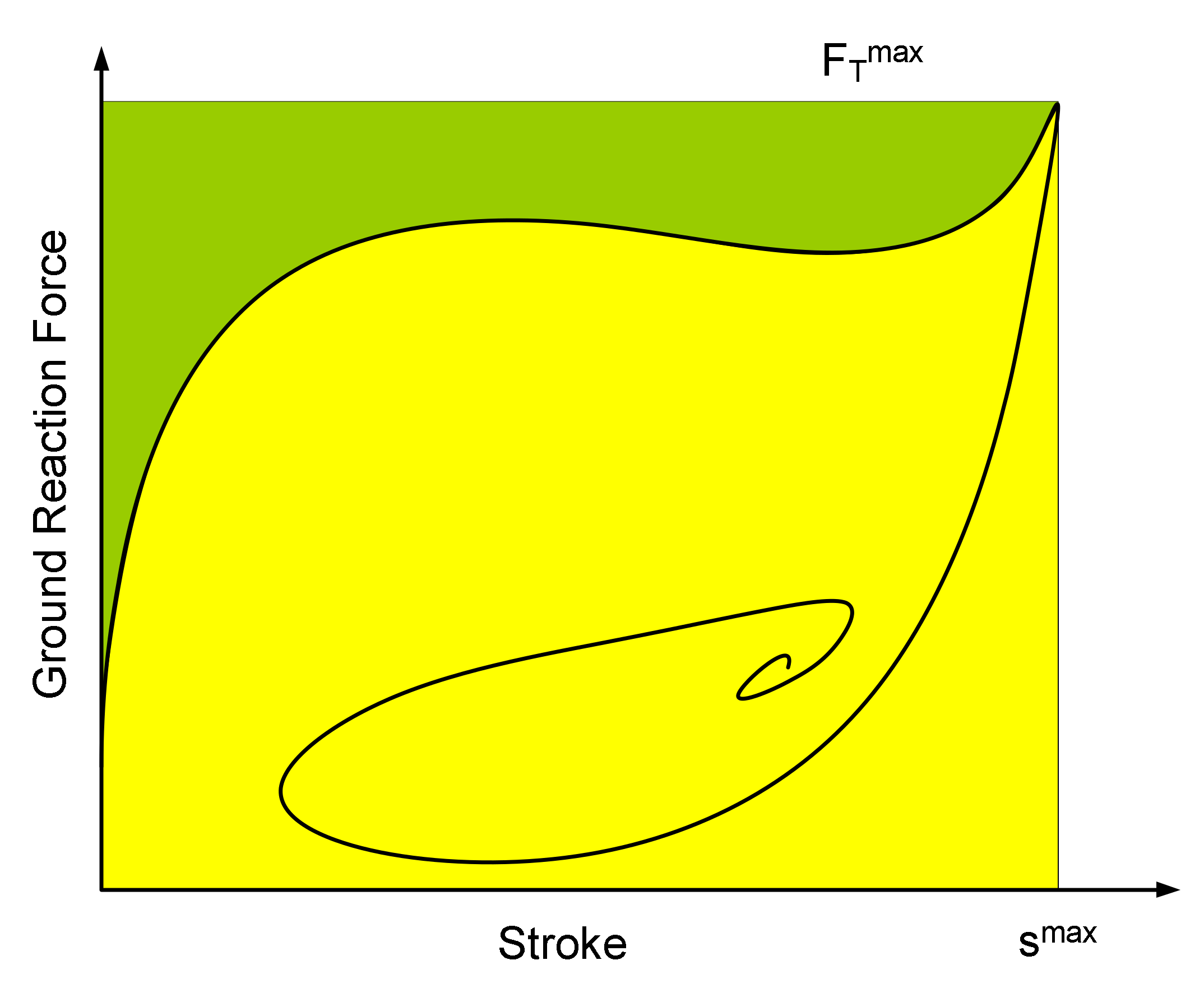
3. Performance Measure of Aircraft Landing Gear in Drop Tests
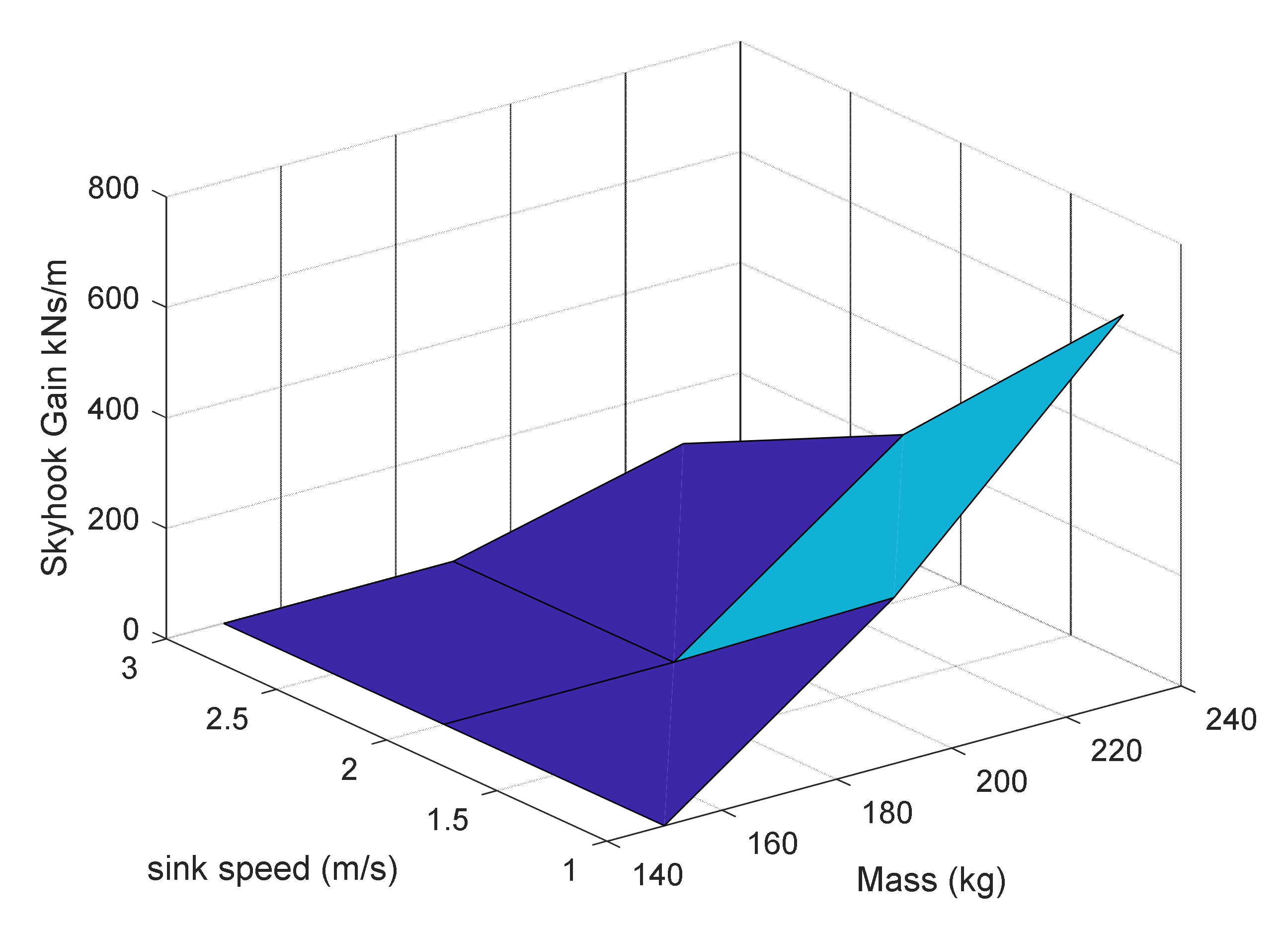
4. Hybrid Controller with Load Cell Data and Known Aircraft Mass
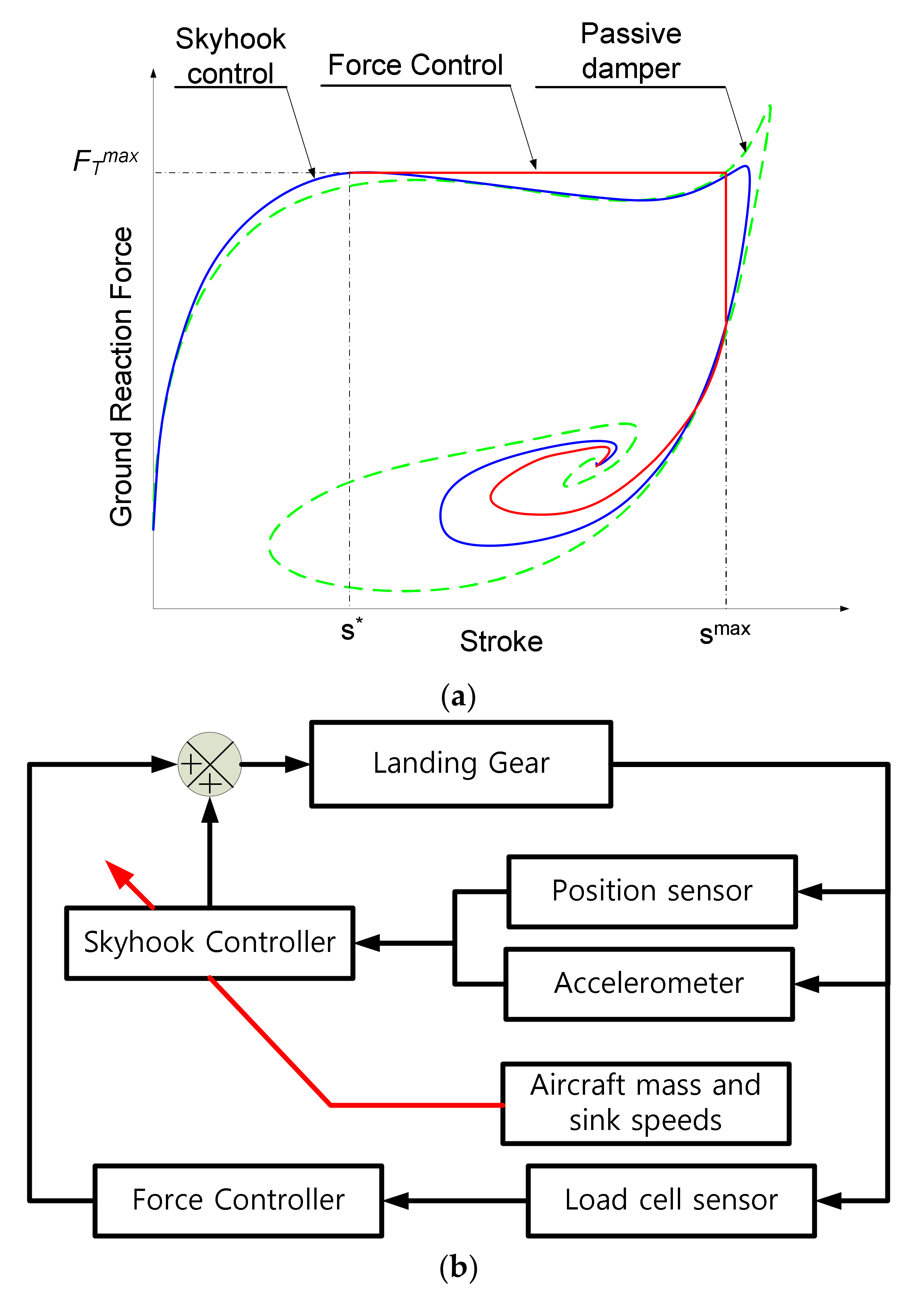
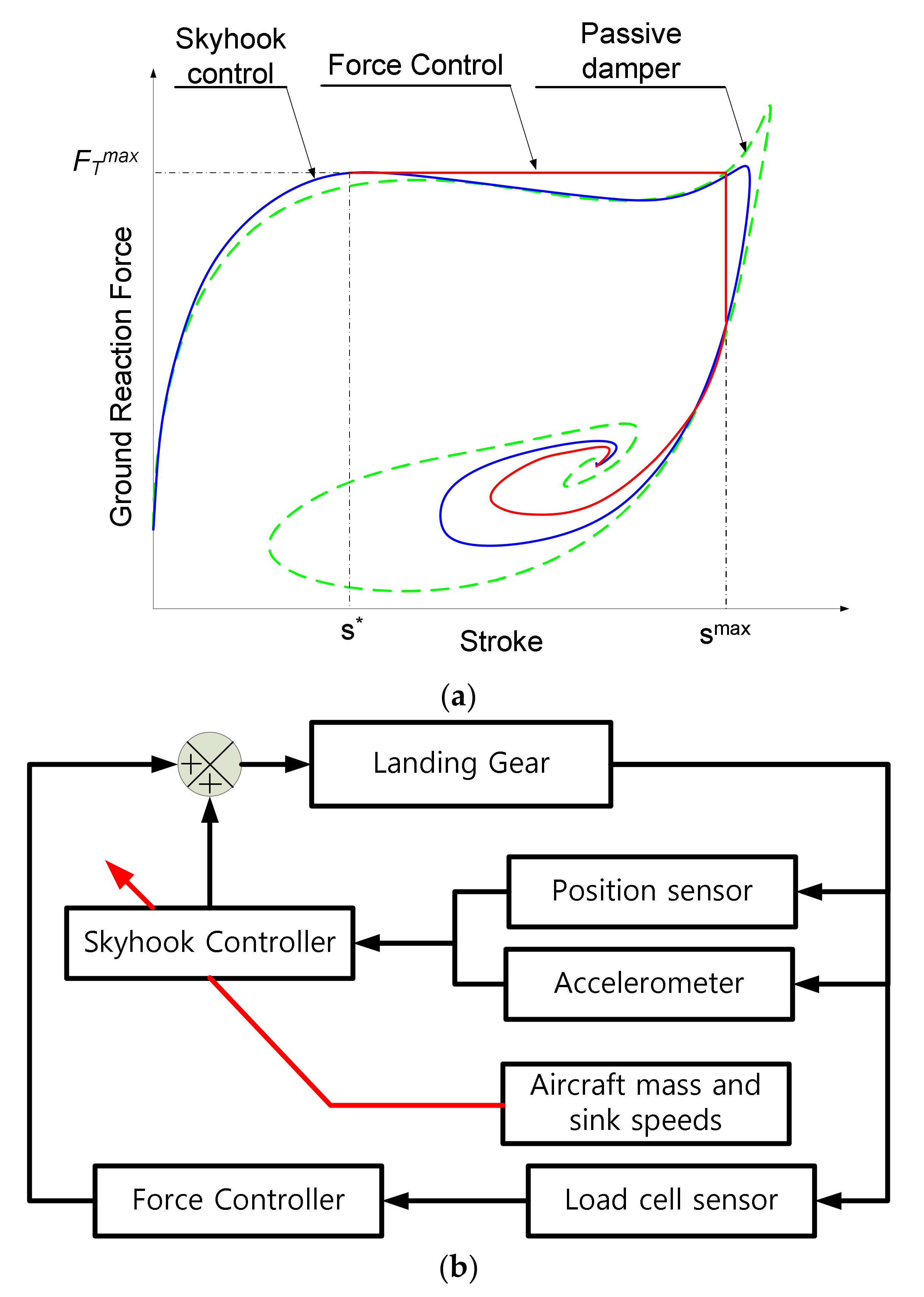
4.1. Control Principle
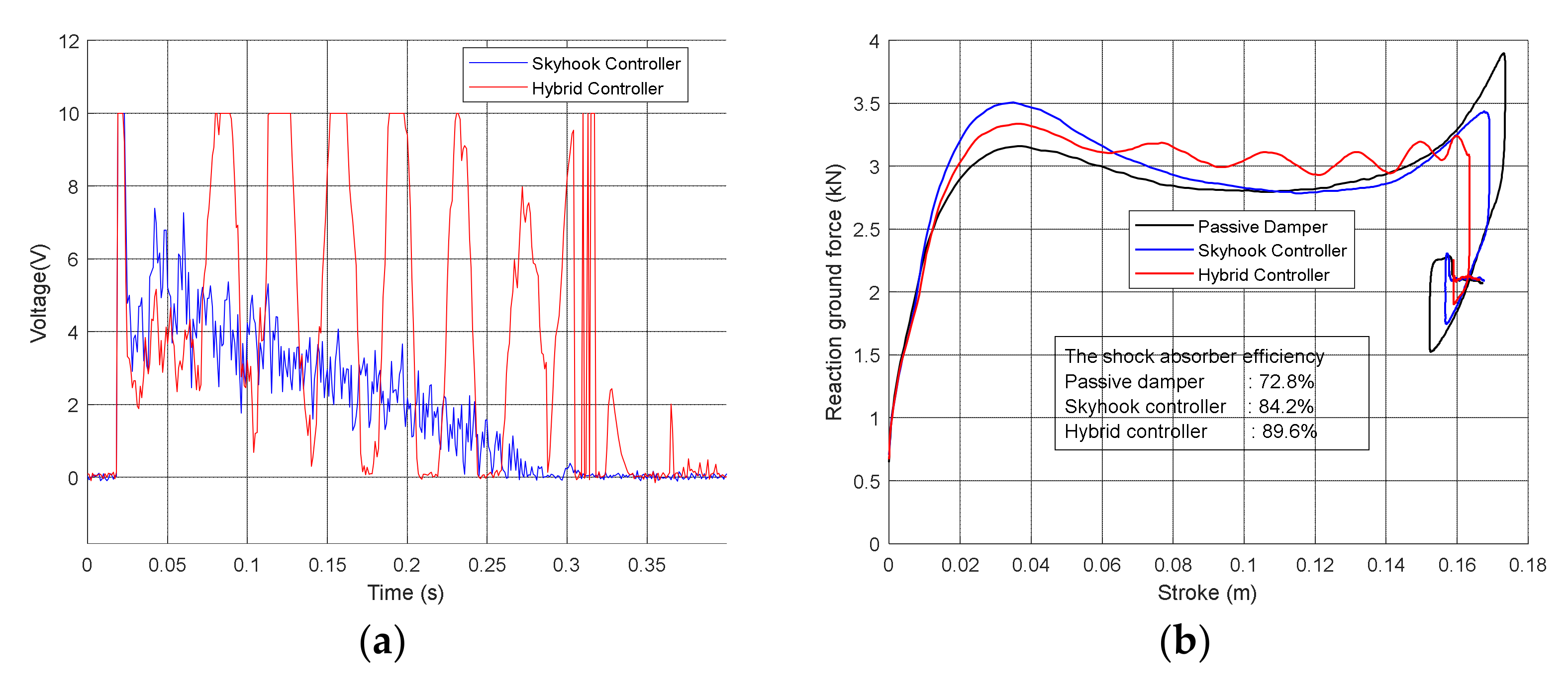
4.2. Experimental Results
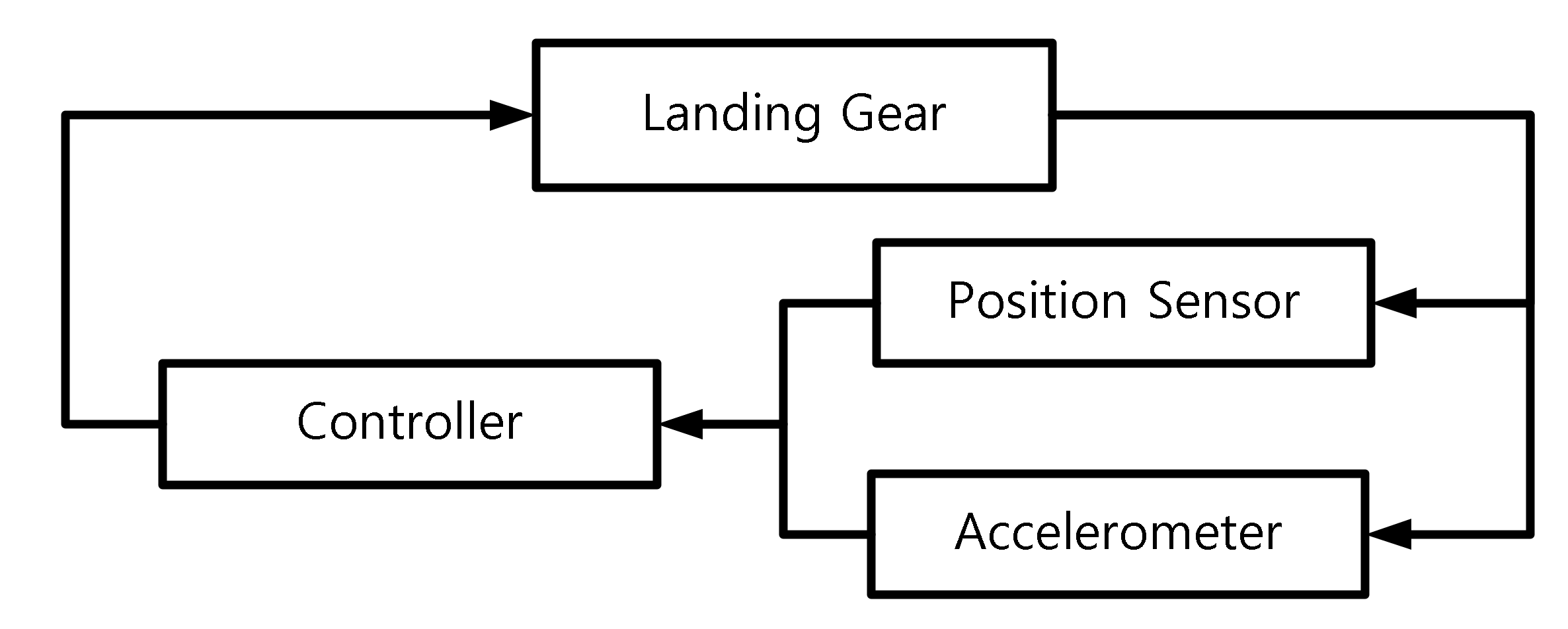
4.3. Control Scheme in Practical Operation Environment
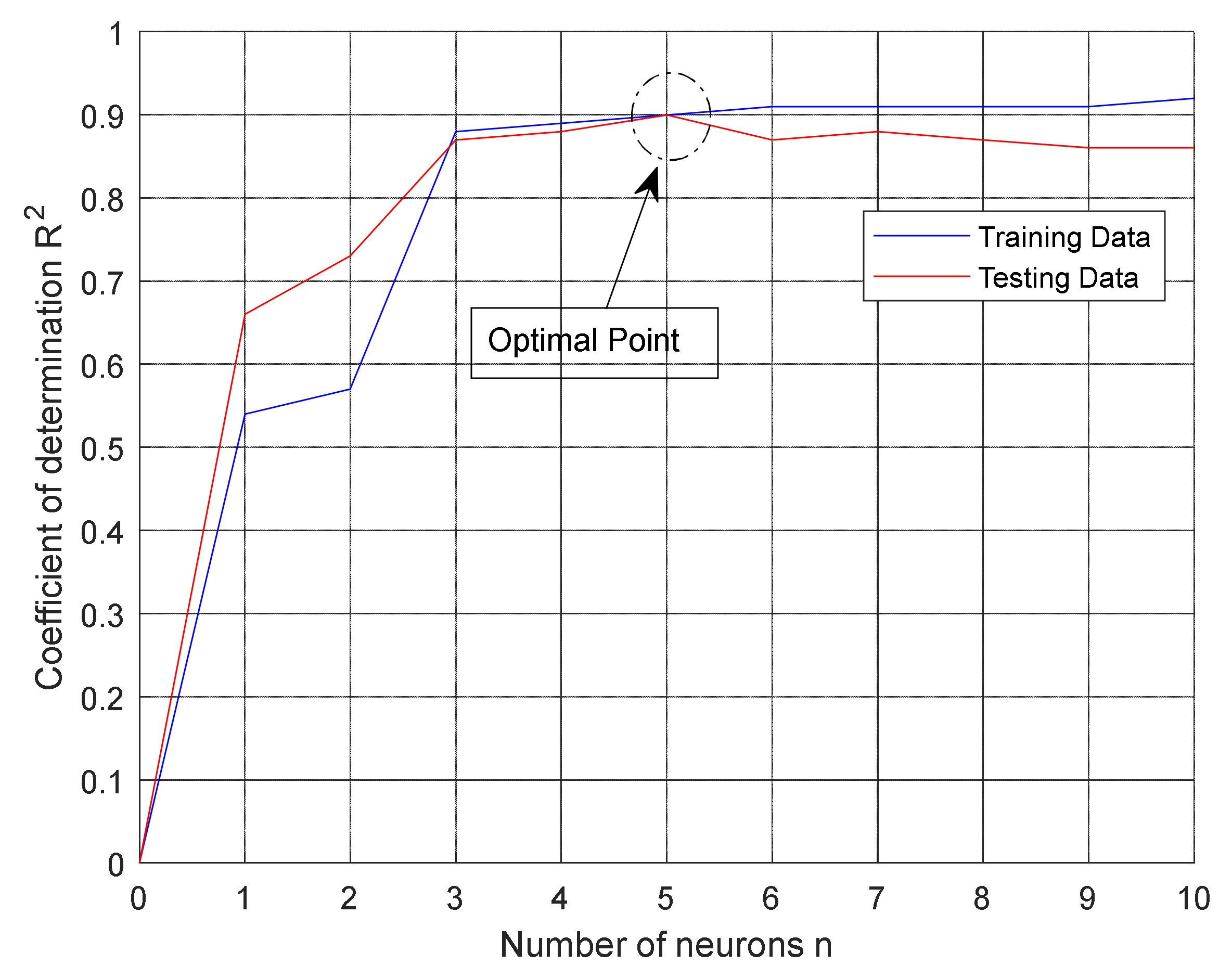
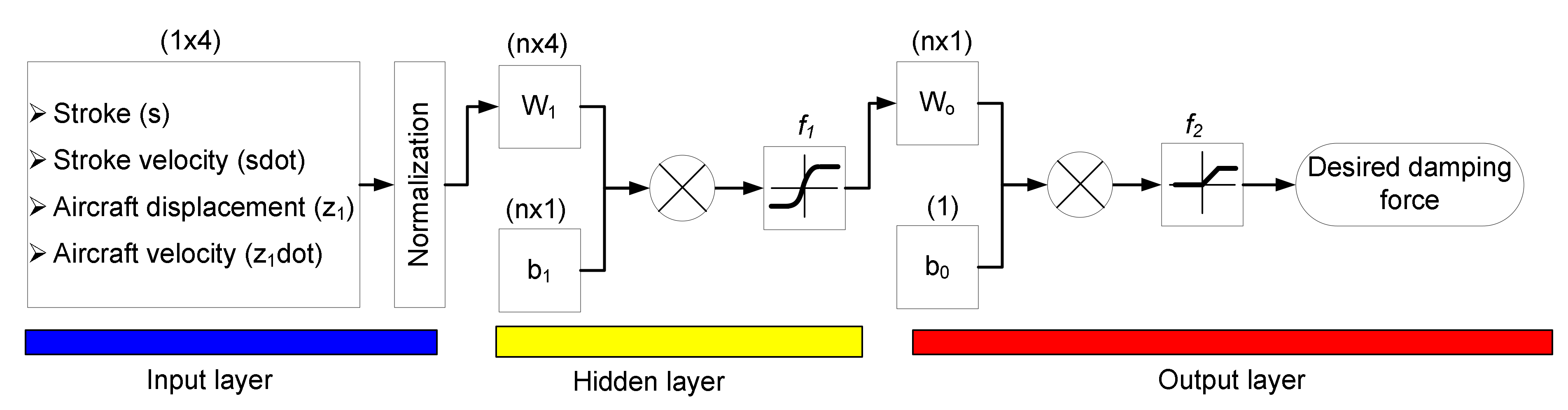
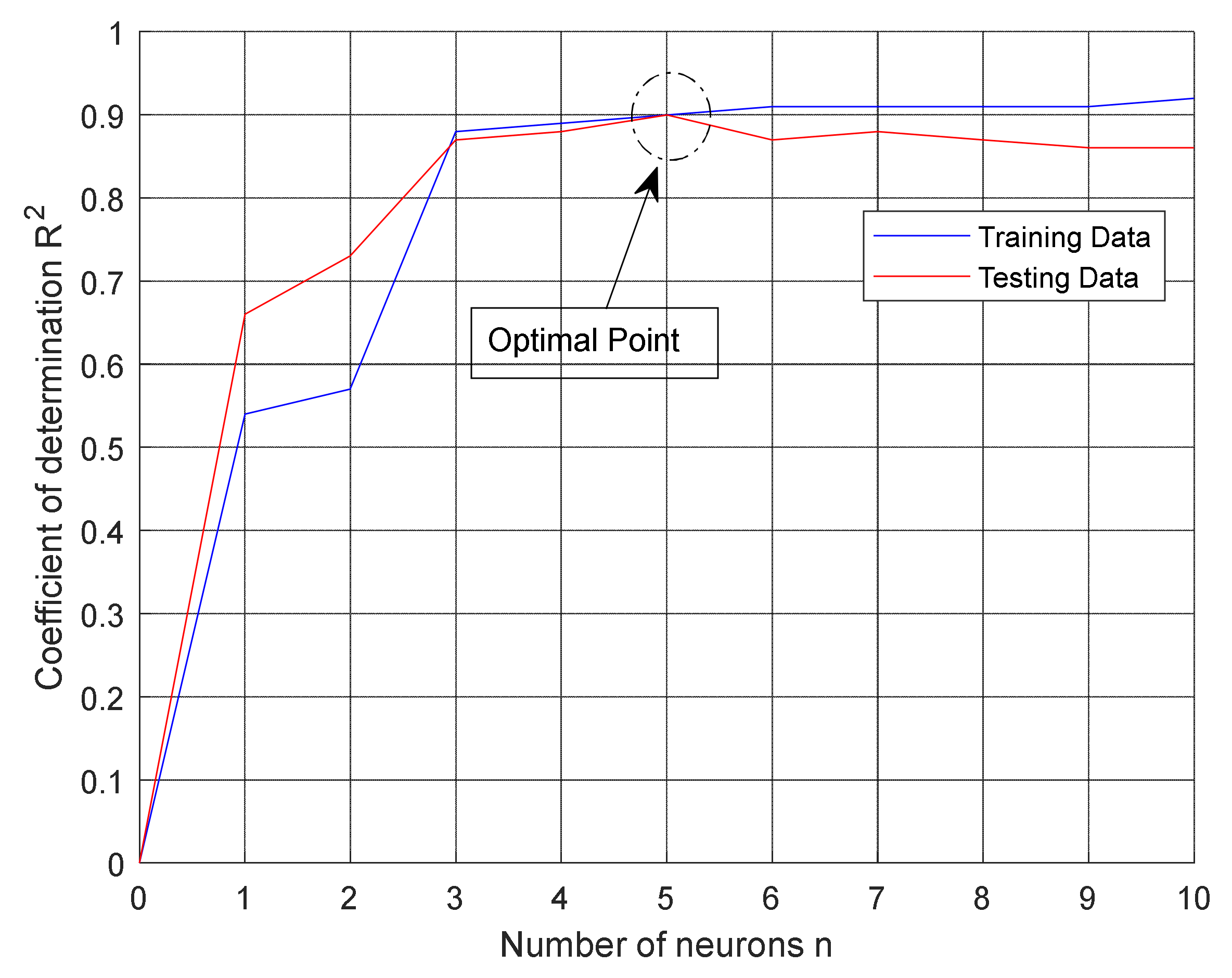
5. Supervised Learning of Neural Network Controller
6. Experimental Results and Discussion
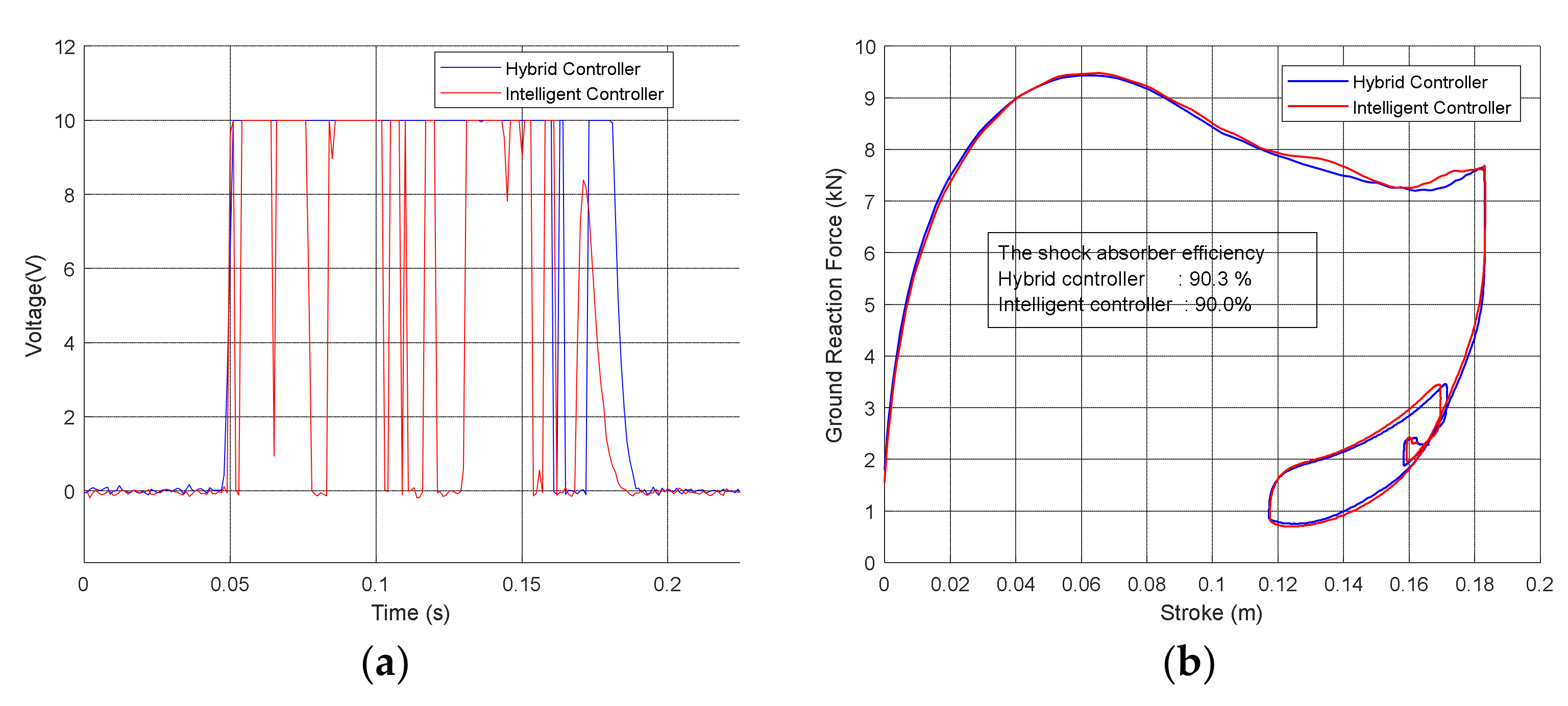
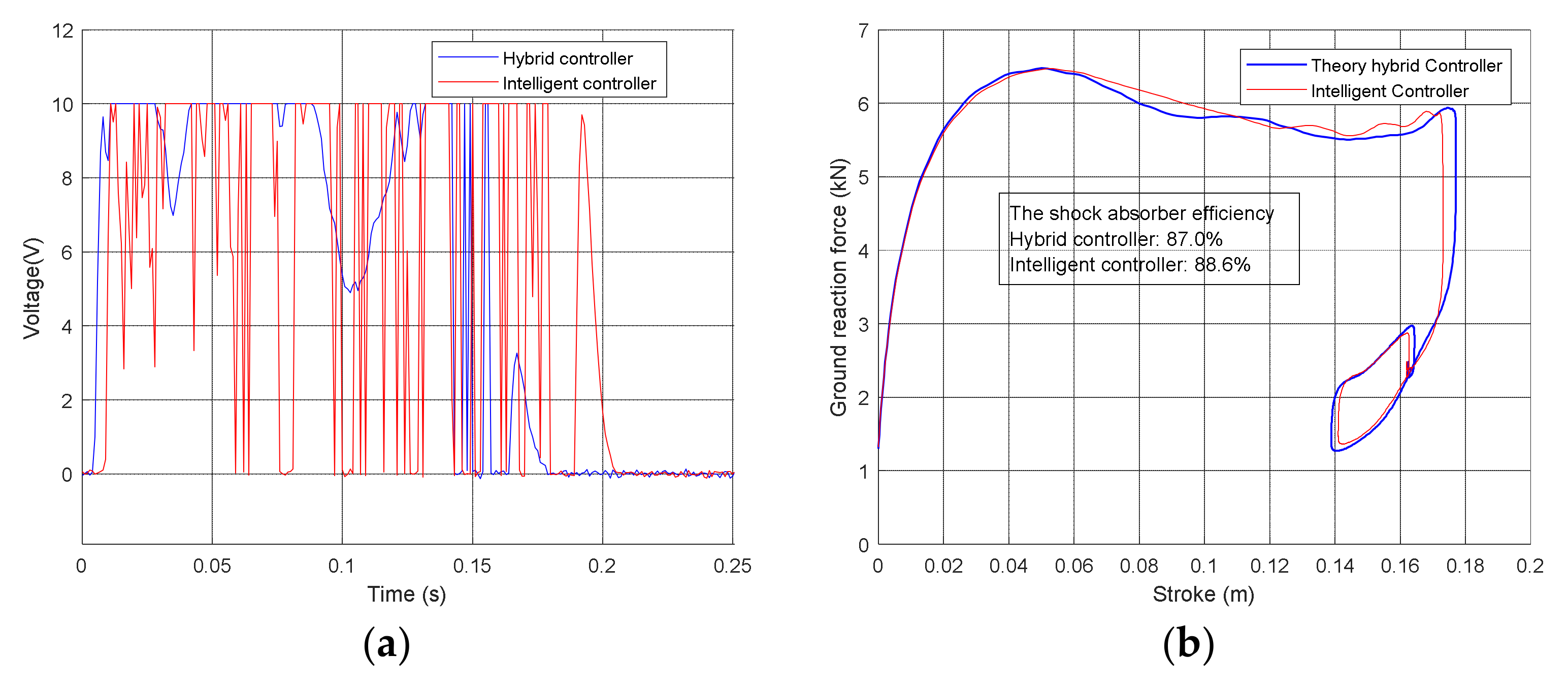
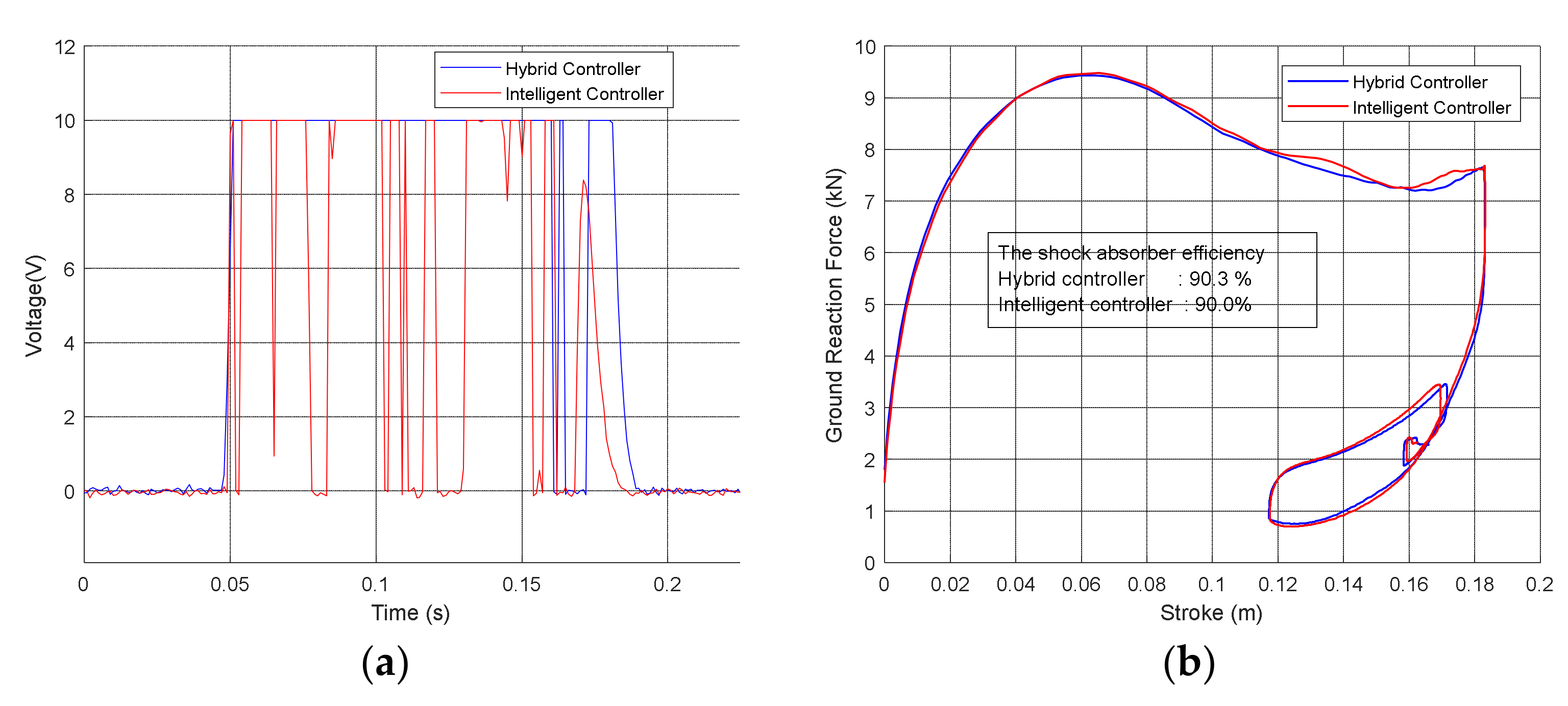
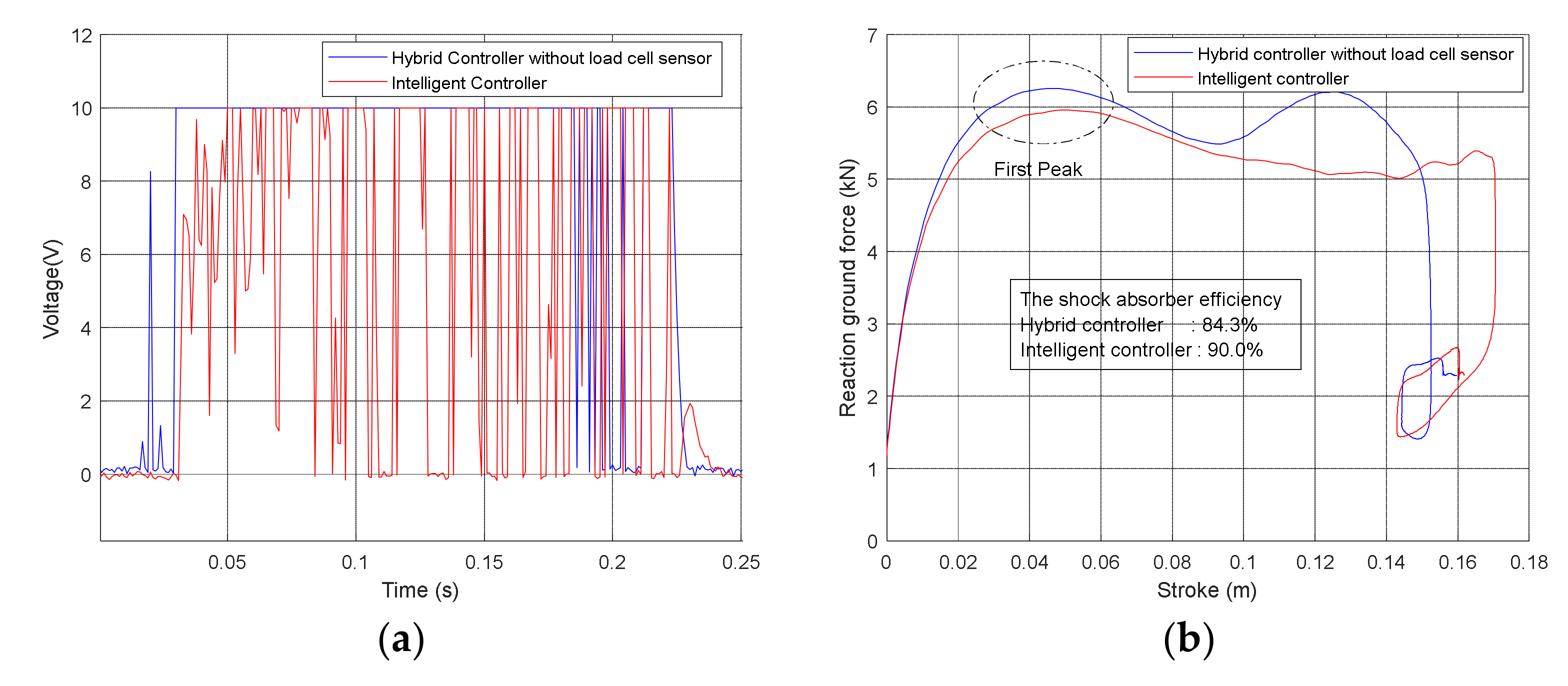
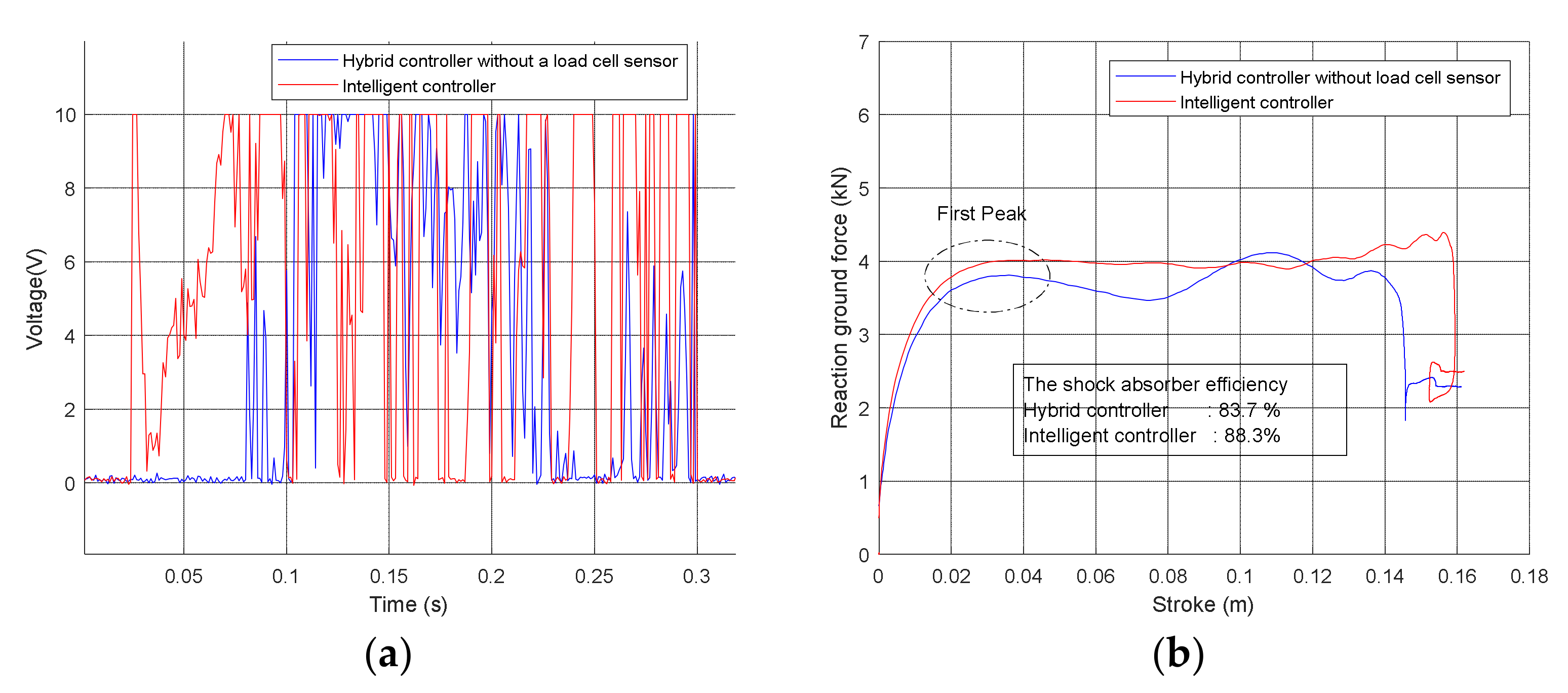
6.1. Comparison between the Hybrid Controller with Ideal Information and Intelligent Controller
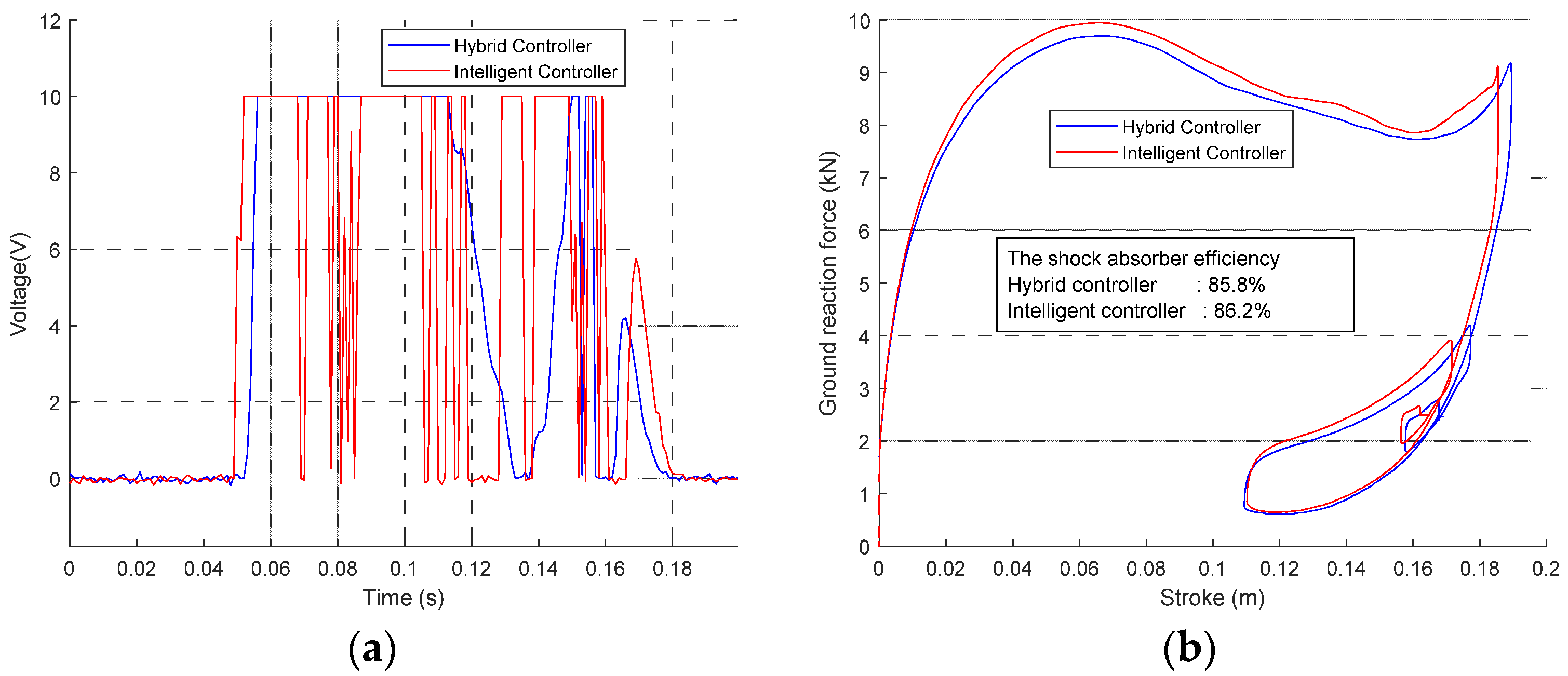
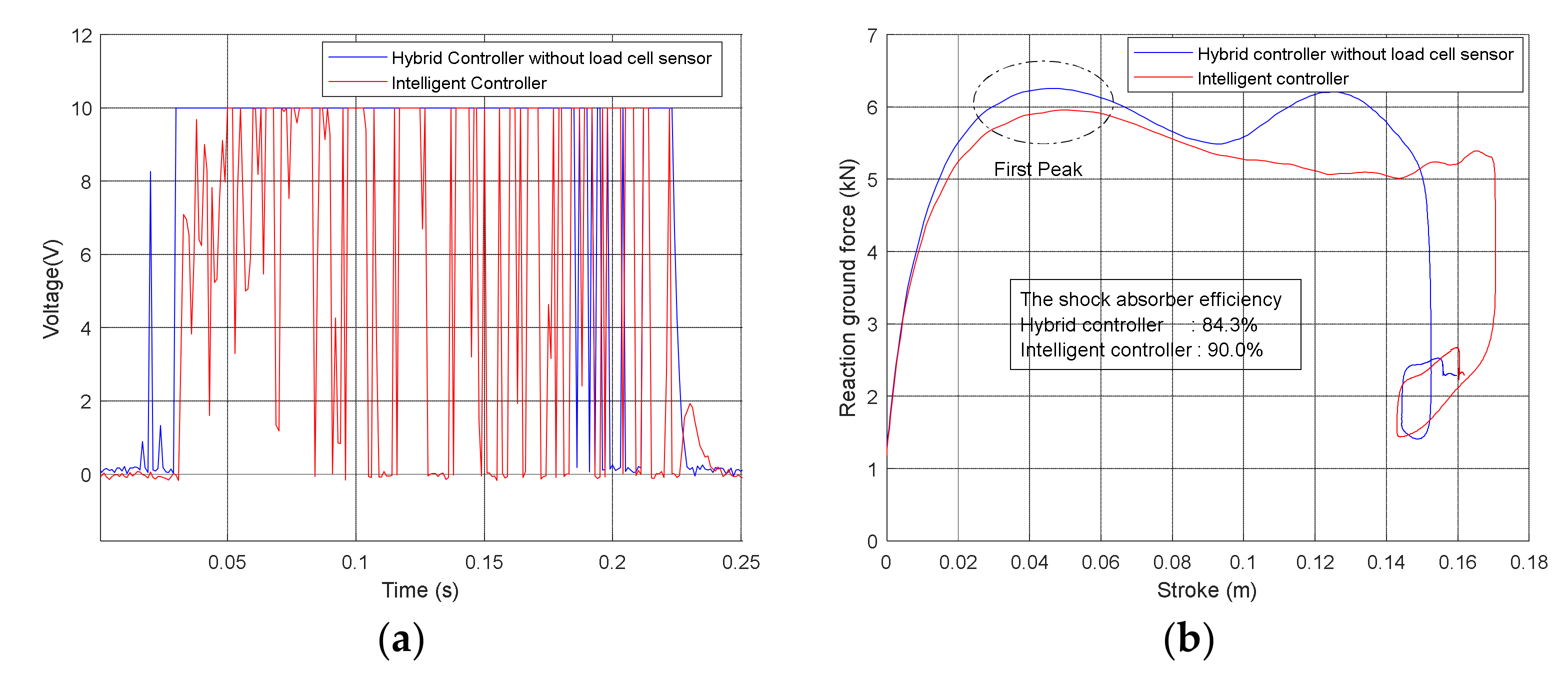
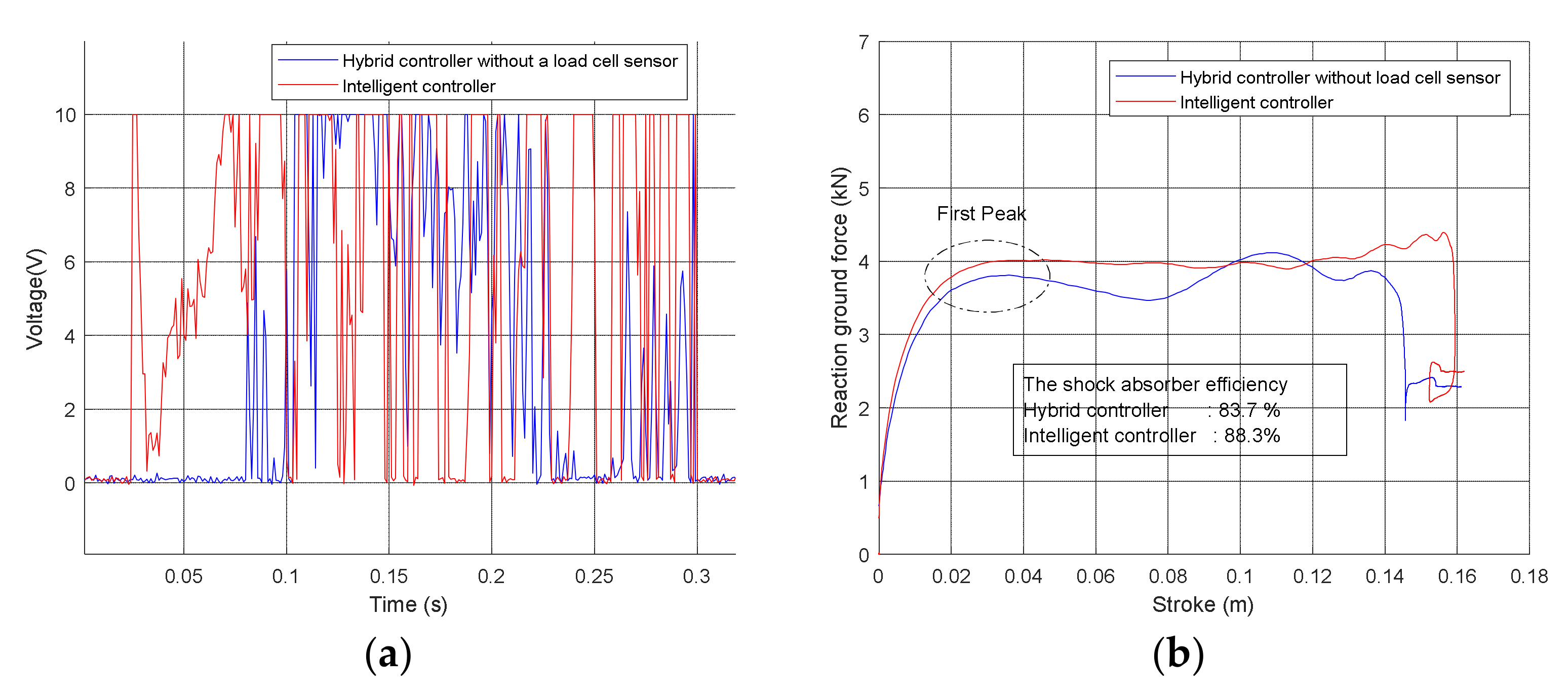
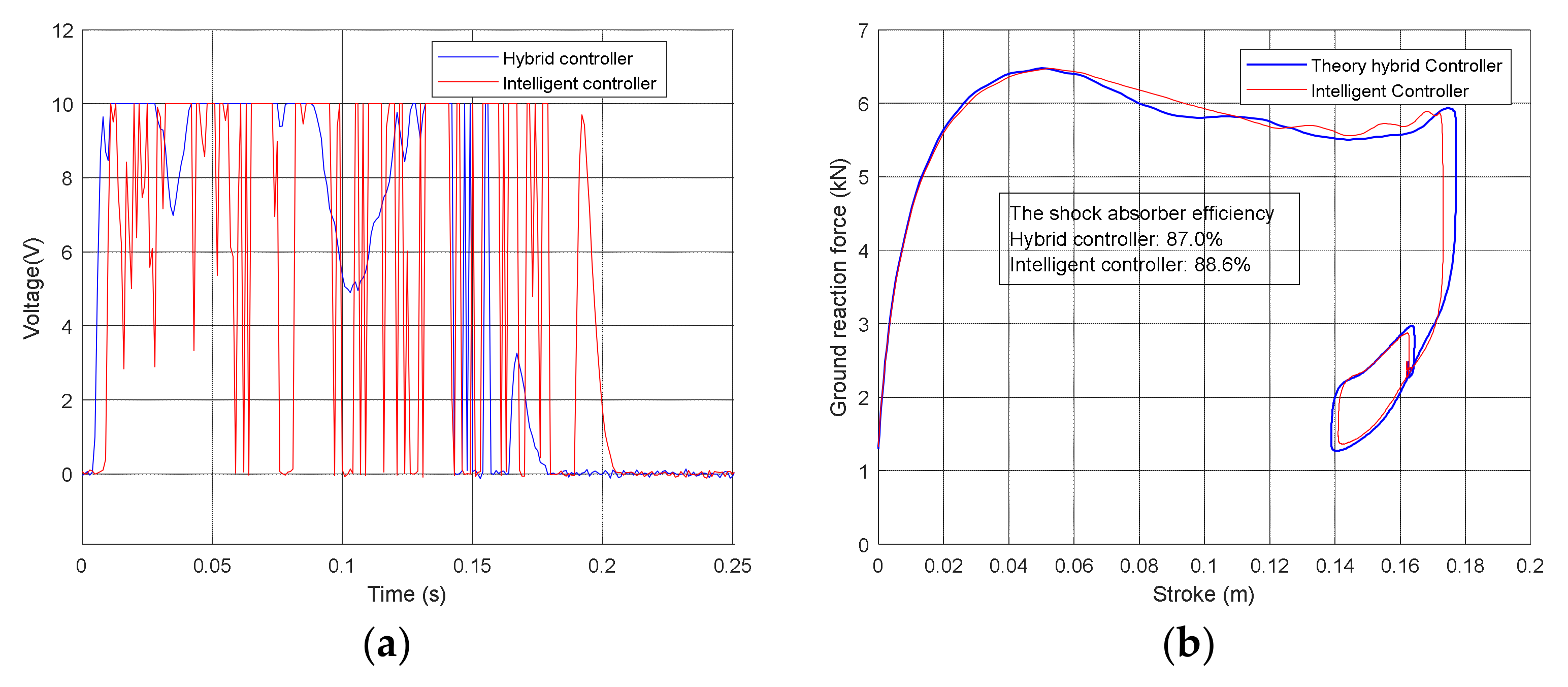
6.2. Comparison between the Hybrid Controller with Estimates and Intelligent Controller
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- 14 CFR 25—Airworthiness Standards: Transport Category Airplanes. Available online: https://www.govinfo.gov/app/details/CFR-2011-title14-vol1/CFR-2011-title14-vol1-part25/summary (accessed on 7 December 2021).
- Puma-Araujo, S.D.; Olvera-Trejo, D.; Martínez-Romero, O.; Urbikain, G.; Elías-Zúñiga, A.; López de Lacalle, L.N. Semi-Active Magnetorheological Damper Device for Chatter Mitigation during Milling of Thin-Floor Components. Appl. Sci. 2020, 10, 5313. [Google Scholar] [CrossRef]
- Symans, M.D.; Constantinou, M.C. Semi-Active Control Systems for Seismic Protection of Structures: A State-of-the-Art Review. Eng. Struct. 1999, 21, 469–487. [Google Scholar] [CrossRef]
- Ahmadian, M.; Poynor, J.C. An Evaluation of Magneto Rheological Dampers for Controlling Gun Recoil Dynamics. Shock. Vib. 2001, 8, 147–155. [Google Scholar] [CrossRef]
- Choi, S.-B.; Han, Y.-M. Magnetorheological Fluid Technology Applications in Vehicle Systems, 1st ed.; Taylor & Francis Group: Abingdon, UK, 2012; ISBN 978-0-429-11055-9. [Google Scholar]
- Mikułowski, G.; Jankowski, Ł. Adaptive Landing Gear: Optimum Control Strategy and Potential for Improvement. Shock. Vib. 2009, 16, 175–194. [Google Scholar] [CrossRef]
- Choi, Y.-T.; Robinson, R.; Hu, W.; Wereley, N.M.; Birchette, T.S.; Bolukbasi, A.O.; Woodhouse, J. Analysis and Control of a Magnetorheological Landing Gear System for a Helicopter. J. Am. Helicopter Soc. 2016, 61, 1–8. [Google Scholar] [CrossRef]
- Dong, X.M.; Xiong, G.W. Vibration Attenuation of Magnetorheological Landing Gear System with Human Simulated Intelligent Control. Math. Probl. Eng. 2013, 2013, 242476. [Google Scholar] [CrossRef] [Green Version]
- Choi, Y.-T.; Wereley, N.M. Vibration Control of a Landing Gear System Featuring Electrorheological/Magnetorheological Fluids. J. Aircr. 2003, 40, 432–439. [Google Scholar] [CrossRef]
- Young-O, H.; Jae-Up, H.; Jae-Hyuk, H.; Jae-Sung, B.; Kyoung-Ho, L.; Doo-Man, K.; Tae-Wook, K. Force Control of Main Landing Gear using Magneto-Rheological Damper. J. Korean Soc. Aeronaut. Space Sci. 2009, 37, 344–349. [Google Scholar] [CrossRef]
- Luong, Q.V.; Jang, D.-S.; Hwang, J.-H. Robust Adaptive Control for an Aircraft Landing Gear Equipped with a Magnetorheological Damper. Appl. Sci. 2020, 10, 1459. [Google Scholar] [CrossRef] [Green Version]
- Russell, S.; Norvig, P. Artificial Intelligence: A Modern Approach, 3rd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2009; ISBN 978-0-13-604259-4. [Google Scholar]
- Badue, C.; Guidolini, R.; Carneiro, R.V.; Azevedo, P.; Cardoso, V.B.; Forechi, A.; Jesus, L.; Berriel, R.; Paixão, T.M.; Mutz, F.; et al. Self-Driving Cars: A Survey. Expert Syst. Appl. 2021, 165, 113816. [Google Scholar] [CrossRef]
- Mosavi, A.; Varkonyi, A. Learning in Robotics. Int. J. Robot. Res. 2017, 157, 8–11. [Google Scholar] [CrossRef]
- Xu, Q.; Chen, J.; Liu, X.; Li, J.; Yuan, C. An ABC-BP-ANN Algorithm for Semi-Active Control for Magnetorheological Damper. KSCE J. Civ. Eng. 2017, 21, 2310–2321. [Google Scholar] [CrossRef]
- Luong, Q.V.; Jang, D.-S.; Hwang, J.-H. Intelligent Control Based on a Neural Network for Aircraft Landing Gear with a Magnetorheological Damper in Different Landing Scenarios. Appl. Sci. 2020, 10, 5962. [Google Scholar] [CrossRef]
- Jo, B.-H.; Jang, D.-S.; Hwang, J.-H.; Choi, Y.-H. Experimental Validation for the Performance of MR Damper Aircraft Landing Gear. Aerospace 2021, 8, 272. [Google Scholar] [CrossRef]
- MRF-140CG Magneto-Rheological Fluid—1 Liter. Available online: http://www.lordmrstore.com/lord-mr-products/mrf-140cg-magneto-rheological-fluid (accessed on 6 March 2021).
- Currey, N.S. Aircraft Landing Gear Design: Principles and Practices; AIAA Education Series; AIAA: Reston, VA, USA, 1988; ISBN 978-0-930403-41-6. [Google Scholar]
- Han, C.; Kim, B.-G.; Choi, S.-B. Design of a New Magnetorheological Damper Based on Passive Oleo-Pneumatic Landing Gear. J. Aircr. 2018, 55, 2510–2520. [Google Scholar] [CrossRef]
- Lee, D.Y.; Nam, Y.J.; Yamane, R.; Park, M.K. Performance Evaluation on Vibration Control of MR Landing Gear. J. Phys. Conf. Ser. 2009, 149, 012068. [Google Scholar] [CrossRef]
- Karnopp, D.; Crosby, M.J.; Harwood, R.A. Vibration Control Using Semi-Active Force Generators. J. Eng. Ind. 1974, 96, 619–626. [Google Scholar] [CrossRef]
- Slotine, J.-J.E.; Li, W. Applied Nonlinear Control; Prentice-Hall International: Upper Saddle River, NJ, USA, 1991; ISBN 0-13-040890-5. [Google Scholar]
- Sun, J.; Ellerbroek, J.; Hoekstra, J.M. Aircraft Initial Mass Estimation Using Bayesian Inference Method. Transp. Res. Part C Emerg. Technol. 2018, 90, 59–73. [Google Scholar] [CrossRef] [Green Version]
- Hagan, M.T.; Demuth, H.B.; Beale, M.H.; De Jesús, O. Neural Network Design, 2nd ed.; Martin Hagan, Univerity of Kansas: Lawrence, KS, USA, 2014; ISBN 0-9717321-1-6. [Google Scholar]
- Workflow for Neural Network Design. Available online: https://www.mathworks.com/help/deeplearning/ug/workflow-for-neural-network-design.html (accessed on 9 January 2021).
- Linear Regression. Available online: https://www.mathworks.com/help/matlab/data_analysis/linear-regression.html (accessed on 10 September 2021).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Passive Damper | Skyhook Control | Hybrid Control | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| η (%) | η (%) | η (%) | ||||||||
| m1 = 150 kg | v = 1 m/s | 3.09 | 0.160 | 81.4 | 3.09 | 0.16 | 81.4 | 3.85 | 0.148 | 84.9 |
| v = 2 m/s | 5.55 | 0.168 | 72.4 | 5.55 | 0.168 | 72.4 | 5.36 | 0.150 | 79.4 | |
| v = 3 m/s | 8.59 | 0.176 | 72.5 | 8.59 | 0.176 | 72.5 | 8.60 | 0.157 | 81.0 | |
| m1 = 190 kg | v = 1 m/s | 3.90 | 0.174 | 72.8 | 3.51 | 0.169 | 84.2 | 3.34 | 0.166 | 89.6 |
| v = 2 m/s | 5.83 | 0.182 | 78.2 | 5.83 | 0.182 | 78.2 | 5.90 | 0.167 | 85.3 | |
| v = 3 m/s | 9.21 | 0.188 | 77.5 | 9.21 | 0.188 | 77.5 | 9.17 | 0.176 | 83.0 | |
| m1 = 230 kg | v = 1 m/s | 5.20 | 0.180 | 65.3 | 4.17 | 0.172 | 85.5 | 3.93 | 0.172 | 90.5 |
| v = 2 m/s | 6.84 | 0.186 | 75.6 | 6.81 | 0.183 | 77.9 | 6.16 | 0.184 | 85.8 | |
| v = 3 m/s | 9.93 | 0.194 | 80.6 | 9.93 | 0.194 | 80.6 | 9.78 | 0.191 | 85.1 | |
| −2.536 | 4.404 | −1.489 | 3.334 | −1.500 | |
| −3.407 | 3.212 | −0.015 | 3.467 | −1.293 | |
| −3.215 | −2.024 | 8.346 | 1.070 | 6.579 | |
| 3.299 | 2.796 | 56.78 | −0.758 | −6.821 | |
| 5.773 | −7.054 | 3.541 | −6.433 | 4.576 | |
| 25.91 | −24.22 | 16.95 | 46.08 | −36.71 | |
| 15.75 | |||||
| Training Set | Testing Set | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Hybrid Control | Intelligent Control | Hybrid Control | Intelligent Control | |||||||||||
| η (%) | η (%) | η (%) | η (%) | |||||||||||
| m1 = 150 kg | v = 1 m/s | 3.15 | 0.143 | 78.6 | 3.60 | 0.142 | 76.9 | m1 = 170 kg | 3.49 | 0.159 | 80.6 | 3.61 | 0.147 | 82.1 |
| v = 2 m/s | 5.77 | 0.149 | 77.6 | 5.75 | 0.144 | 76.6 | 5.82 | 0.153 | 82.1 | 5.83 | 0.153 | 82.3 | ||
| v = 3 m/s | 9.06 | 0.155 | 79.7 | 9.06 | 0.154 | 78.9 | 9.11 | 0.164 | 81.2 | 8.95 | 0.167 | 81.2 | ||
| m1 = 190 kg | v = 1 m/s | 3.58 | 0.170 | 89.6 | 3.60 | 0.155 | 87.9 | m1 = 210 kg | 3.74 | 0.163 | 90.3 | 3.81 | 0.160 | 90.0 |
| v = 2 m/s | 6.19 | 0.161 | 85.1 | 5.97 | 0.162 | 84.7 | 5.88 | 0.176 | 86.6 | 5.96 | 0.171 | 87.5 | ||
| v = 3 m/s | 9.69 | 0.174 | 82.1 | 9.32 | 0.176 | 82.6 | 9.43 | 0.183 | 84.6 | 9.48 | 0.183 | 84.2 | ||
| m1 = 230 kg | v = 1 m/s | 4.11 | 0.168 | 90.6 | 4.39 | 0.162 | 88.3 | |||||||
| v = 2 m/s | 6.14 | 0.181 | 86.5 | 6.46 | 0.173 | 89.6 | ||||||||
| v = 3 m/s | 9.69 | 0.189 | 85.8 | 9.95 | 0.186 | 86.2 | ||||||||
| Landing Conditions | Hybrid Control | Intelligent Control | ||||
|---|---|---|---|---|---|---|
| (kN) | (m) | η (%) | (kN) | (m) | η (%) | |
| Case 1: m1 = 220 kg, v = 1.83 m/s | 4.97 | 0.175 | 88.5 | 5.16 | 0.165 | 91.5 |
| Case 2: m1 = 220 kg, v = 2.32 m/s | 6.48 | 0.177 | 87.0 | 6.50 | 0.173 | 88.6 |
| Case 3: m1 = 220 kg, v = 2.85 m/s | 8.31 | 0.181 | 86.0 | 8.36 | 0.180 | 86.7 |
| Case 4: m1 = 200 kg, v = 1.88 m/s | 4.97 | 0.162 | 88.7 | 5.07 | 0.157 | 88.0 |
| Case 5: m1 = 200 kg, v = 2.31 m/s | 6.38 | 0.166 | 86.4 | 6.43 | 0.165 | 85.8 |
| Case 6: m1 = 200 kg, v = 2.81 m/s | 8.13 | 0.172 | 85.2 | 8.20 | 0.173 | 84.4 |
| Case 7: m1 = 180 kg, v = 1.83 m/s | 4.81 | 0.151 | 85.4 | 5.00 | 0.152 | 83.1 |
| Case 8: m1 = 180 kg, v = 2.35 m/s | 6.27 | 0.153 | 85.4 | 6.36 | 0.155 | 84.0 |
| Case 9: m1 = 180 kg, v = 2.80 m/s | 7.94 | 0.160 | 84.5 | 7.89 | 0.163 | 83.0 |
| Case 10: m1 = 160 kg, v = 1.84 m/s | 4.73 | 0.148 | 79.6 | 4.92 | 0.145 | 78.4 |
| Case 11: m1 = 160 kg, v = 2.32 m/s | 6.24 | 0.147 | 80.9 | 6.25 | 0.147 | 81.1 |
| Case 12: m1 = 160 kg, v = 2.80 m/s | 7.75 | 0.149 | 82.9 | 7.82 | 0.152 | 81.0 |
| Hybrid Control Without Exact Data | Intelligent Control | ||||||
|---|---|---|---|---|---|---|---|
| (kN) | (m) | η (%) | (kN) | (m) | η (%) | ||
| m1 = 150 kg | v = 1 m/s | 3.89 | 0.146 | 71.2 | 3.60 | 0.142 | 74.9 |
| v = 2 m/s | 5.91 | 0.144 | 73.8 | 5.75 | 0.144 | 76.6 | |
| v = 3 m/s | 9.27 | 0.146 | 78.5 | 9.06 | 0.154 | 78.9 | |
| m1 = 170 kg | v = 1 m/s | 3.99 | 0.149 | 76.5 | 3.61 | 0.147 | 82.1 |
| v = 2 m/s | 5.93 | 0.152 | 79.8 | 5.83 | 0.153 | 82.3 | |
| v = 3 m/s | 9.55 | 0.160 | 81.4 | 8.95 | 0.167 | 81.6 | |
| m1 = 190 kg | v = 1 m/s | 4.06 | 0.152 | 82.5 | 3.60 | 0.155 | 87.9 |
| v = 2 m/s | 6.17 | 0.156 | 84.6 | 5.97 | 0.162 | 84.7 | |
| v = 3 m/s | 9.71 | 0.170 | 82.2 | 9.32 | 0.176 | 82.6 | |
| m1 = 210 kg | v = 1 m/s | 4.13 | 0.164 | 84.3 | 3.81 | 0.160 | 90.0 |
| v = 2 m/s | 6.25 | 0.160 | 87.1 | 5.96 | 0.171 | 87.5 | |
| v = 3 m/s | 9.88 | 0.178 | 83.7 | 9.48 | 0.183 | 84.2 | |
| m1 = 230 kg | v = 1 m/s | 4.24 | 0.172 | 83.7 | 4.39 | 0.162 | 88.3 |
| v = 2 m/s | 6.61 | 0.170 | 89.0 | 6.46 | 0.173 | 89.6 | |
| v = 3 m/s | 9.82 | 0.186 | 85.5 | 9.95 | 0.186 | 86.2 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luong, Q.-V.; Jo, B.-H.; Hwang, J.-H.; Jang, D.-S. A Supervised Neural Network Control for Magnetorheological Damper in an Aircraft Landing Gear. Appl. Sci. 2022, 12, 400. https://doi.org/10.3390/app12010400
Luong Q-V, Jo B-H, Hwang J-H, Jang D-S. A Supervised Neural Network Control for Magnetorheological Damper in an Aircraft Landing Gear. Applied Sciences. 2022; 12(1):400. https://doi.org/10.3390/app12010400
Chicago/Turabian StyleLuong, Quoc-Viet, Bang-Hyun Jo, Jai-Hyuk Hwang, and Dae-Sung Jang. 2022. "A Supervised Neural Network Control for Magnetorheological Damper in an Aircraft Landing Gear" Applied Sciences 12, no. 1: 400. https://doi.org/10.3390/app12010400
APA StyleLuong, Q.-V., Jo, B.-H., Hwang, J.-H., & Jang, D.-S. (2022). A Supervised Neural Network Control for Magnetorheological Damper in an Aircraft Landing Gear. Applied Sciences, 12(1), 400. https://doi.org/10.3390/app12010400