Development of a Wearable Finger Exoskeleton for Rehabilitation

 , ,
, ,  and
and
Abstract
1. Introduction
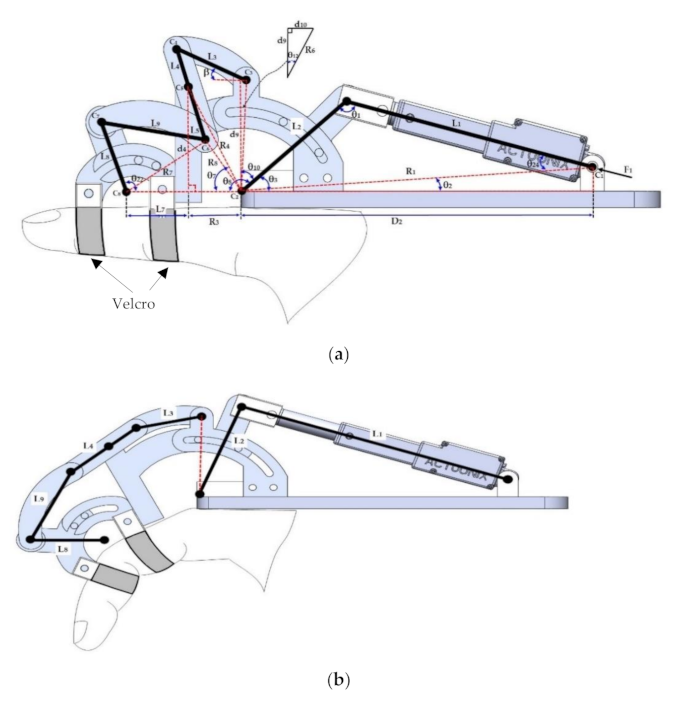
2. Structure Design for the Finger Exoskeleton
2.1. Mechanical Design
2.2. Design Parameters
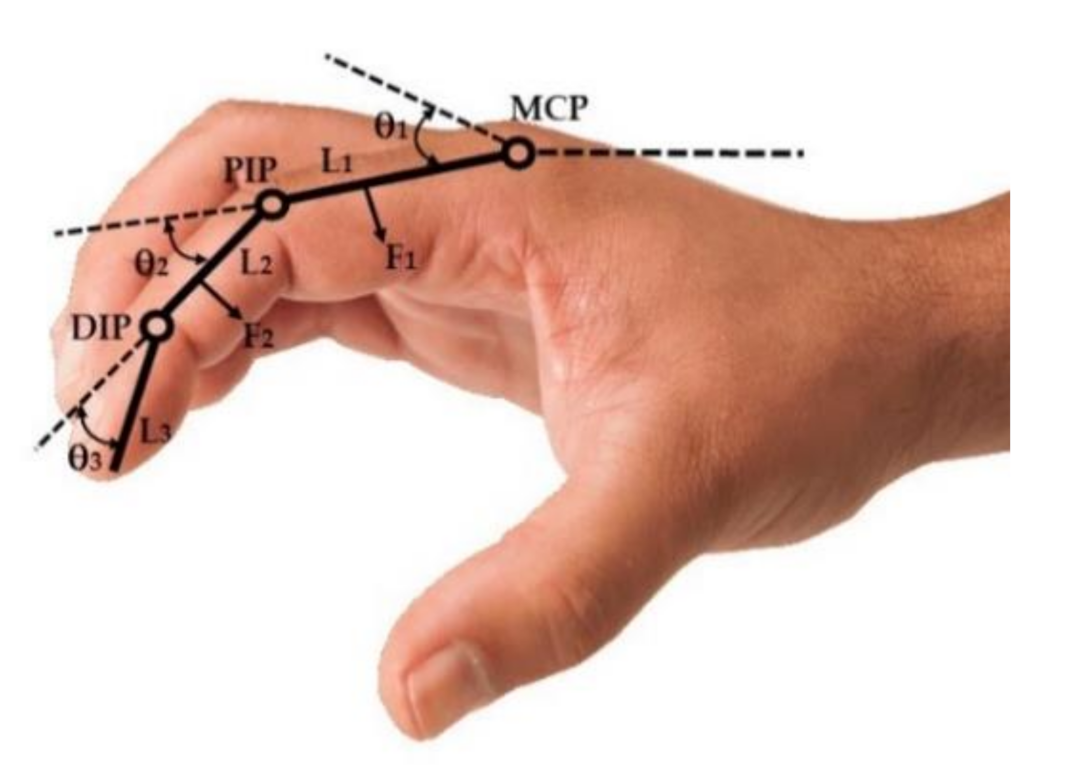
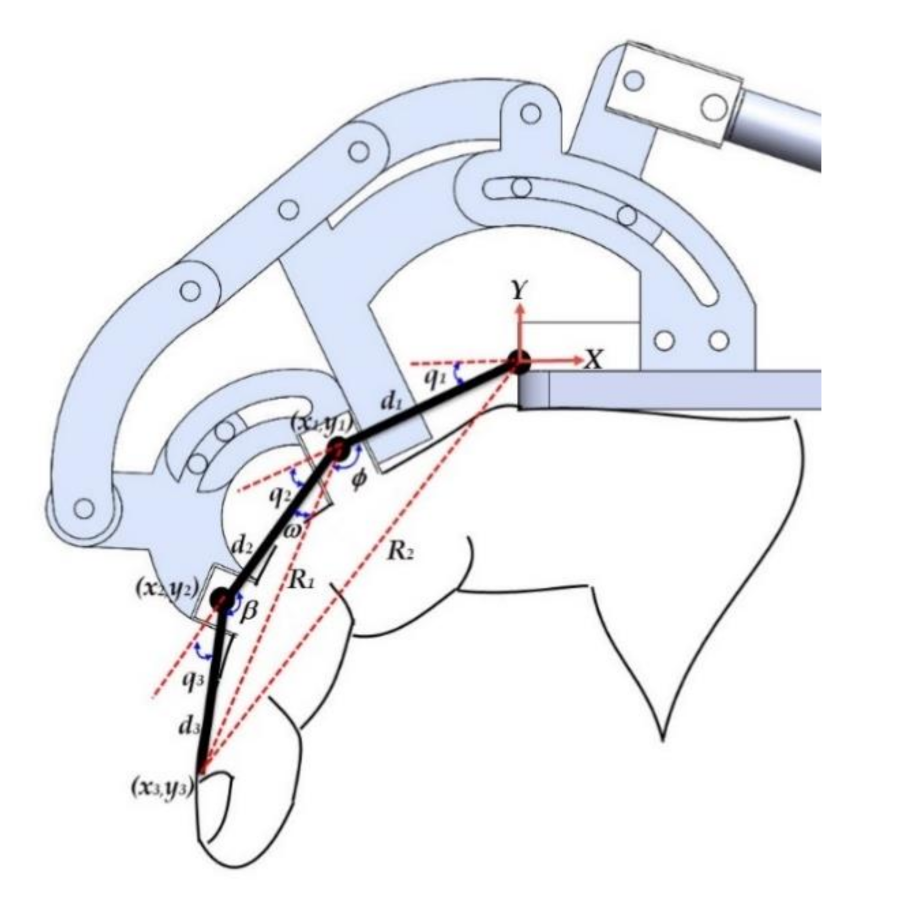
3. Exoskeleton Hand Analysis
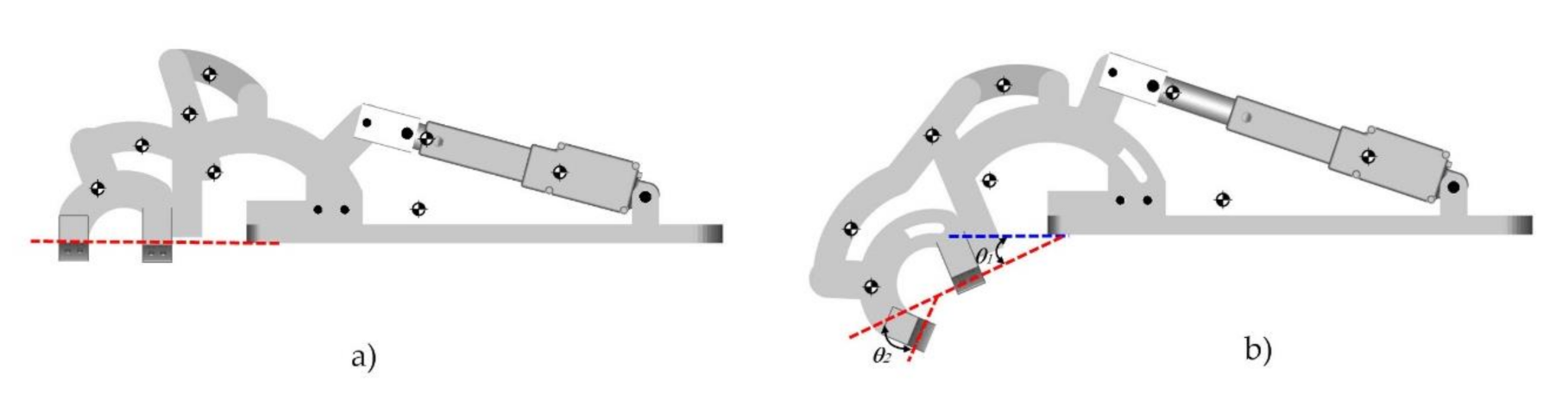
3.1. Position Analysis
3.2. Inverse Kinematics
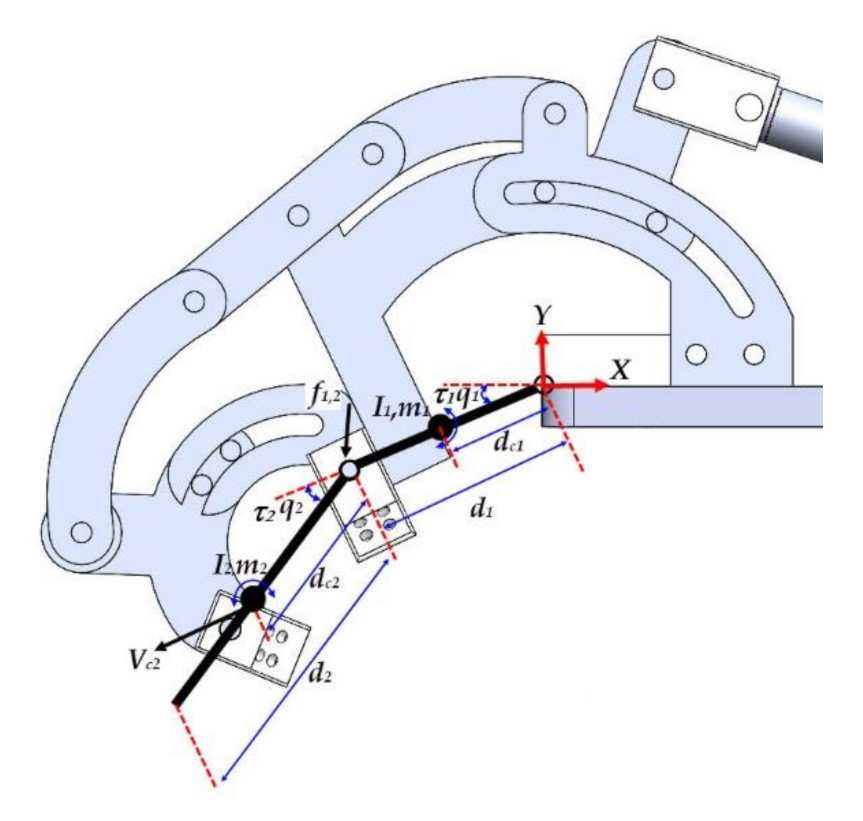
3.3. Dynamics Analysis
4. Experiment Results
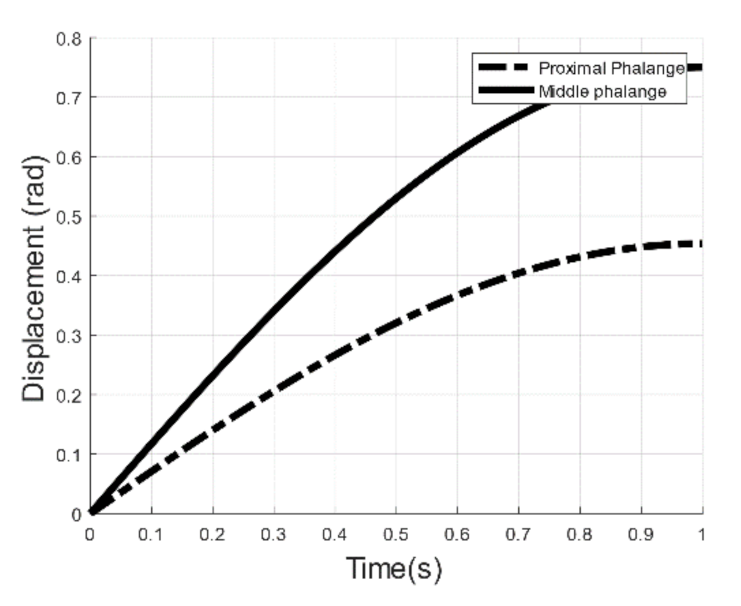
4.1. Position Analysis
4.2. Inverse Kinematics
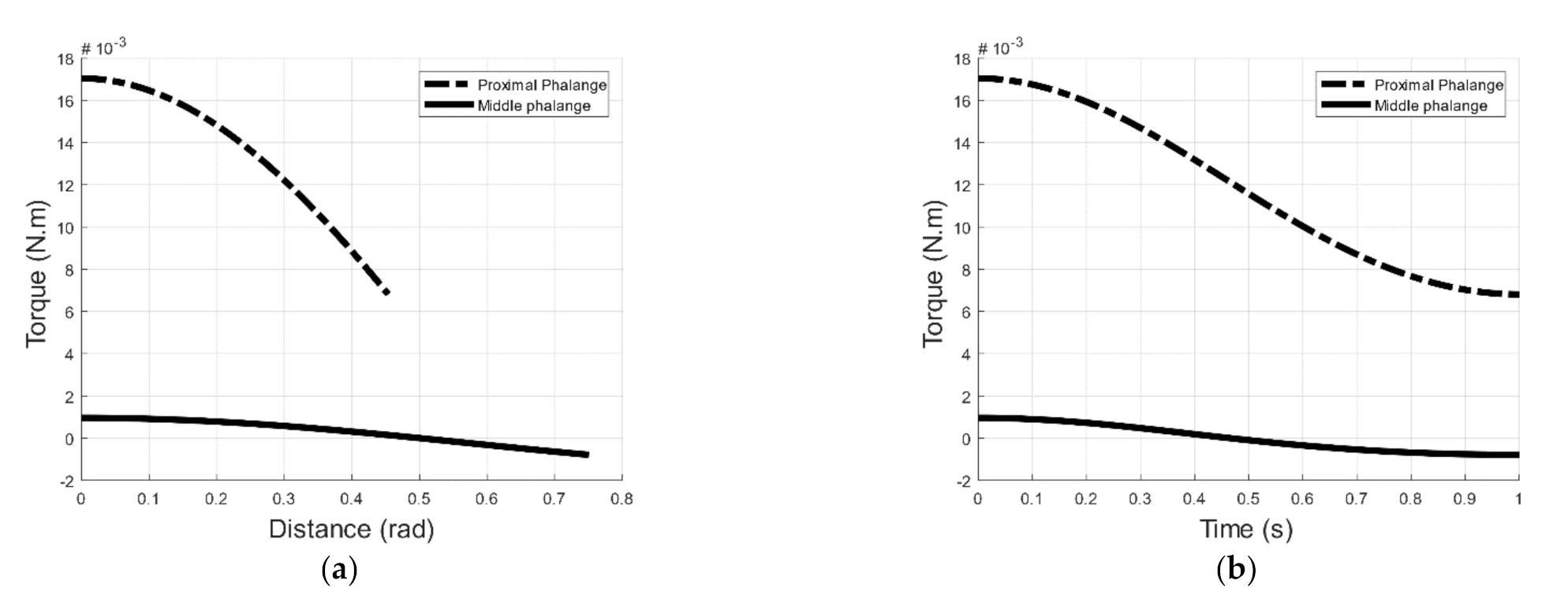
4.3. Dynamics
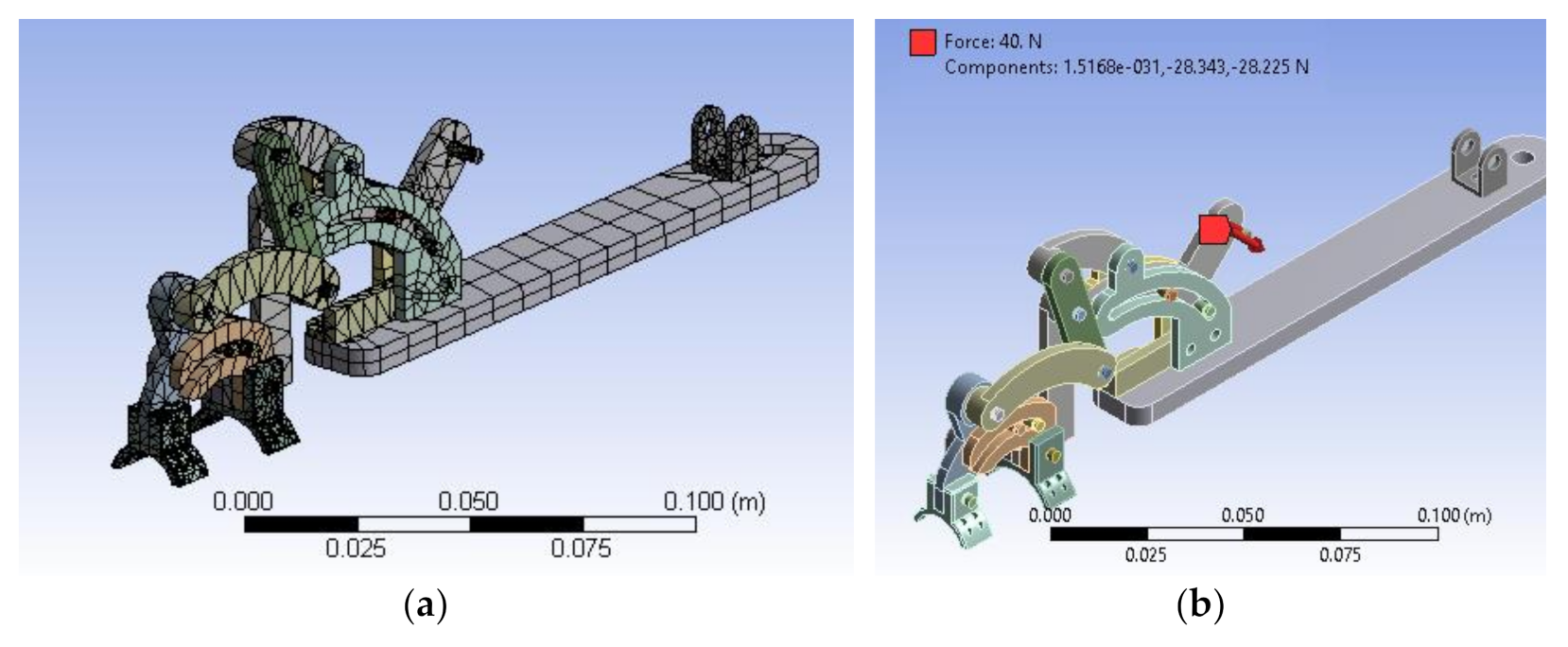
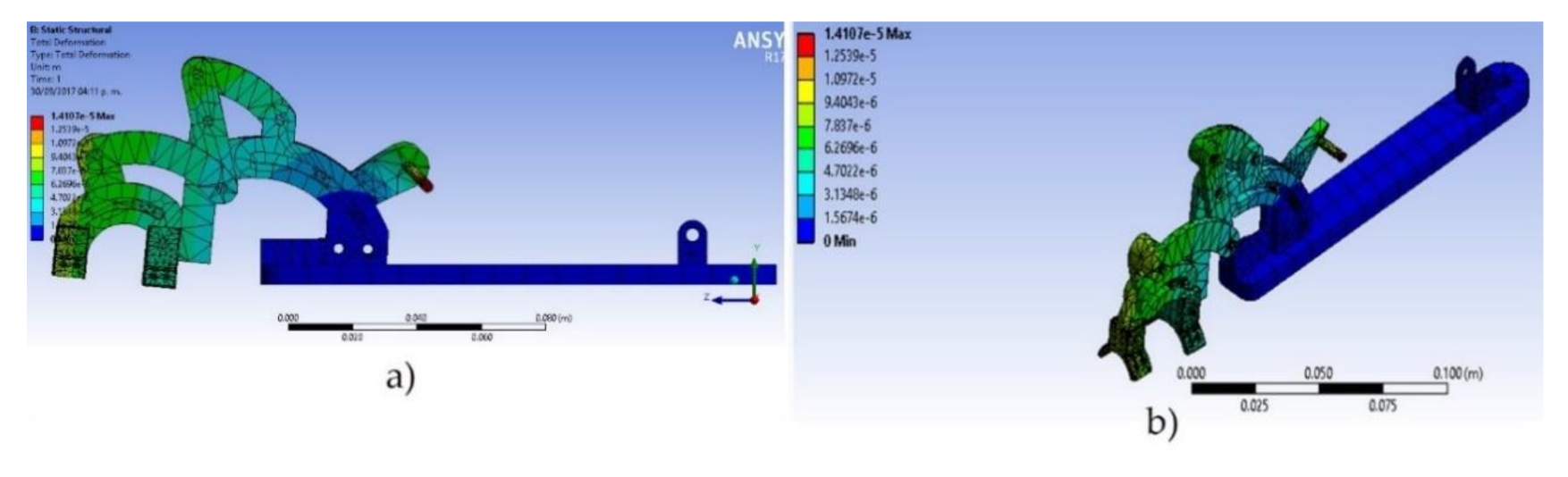
4.4. Structural Analysis
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Siciliano, B.; Khatib, O. Springer Handbook of Robotics; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Wege, A.; Zimmermann, A. Electromyography sensor based control for a hand exoskeleton. In Proceedings of the IEEE International Conference on Robotics and Biomimetics, Sanya, China, 15–18 December 2007; pp. 1470–1475. [Google Scholar]
- Li, J.; Zheng, R.; Zhang, Y.; Yao, J. Ihandrehab: An interactive hand exoskeleton for active and passive rehabilitation. In Proceedings of the IEEE International Conference on Rehabilitation Robotics, Zurich, Switzerland, 29 June–1 July 2011; pp. 1–6. [Google Scholar]
- Ottobock. WaveFlex Hand CPM Device. Available online: https://www.medcomgroup.com/content/QAL%20Waveflex%206000X%20Hand%20CPM%20Operations%20Manual.pdf (accessed on 17 March 2021).
- Tong, K. An intention driven hand functions task training robotic system. In Proceedings of the 32nd Annual International Conference of the IEEE EMBS, Buenos Aires, Argentina, 11 November 2010; pp. 3406–3409. [Google Scholar]
- Lambercy, O.; Schröder, D.; Zwicker, S.; Gassert, R. Design of a thumb exoskeleton for hand rehabilitation. In Proceedings of the International Convention on Rehabilitation Engineering and Assistive Technology (i-CREATe), Zurich, Switzerland, 13 September 2013; Available online: https://www.researchgate.net/publication/259910946_Design_of_a_thumb_exoskeleton_for_hand_rehabilitation (accessed on 4 June 2020).
- Polygerinos, P.; Wang, Z.; Galloway, K.C.; Wood, R.J.; Walsh, C.J. Soft robotic glove for combined assistance and at-home rehabilitation. Robot. Autonom. Syst. 2015, 73, 135–143. [Google Scholar] [CrossRef]
- Lucas, L.; DiCicco, M.; Matsuoka, Y. An emg-controlled hand exoskeleton for natural pinching. J. Robot Mechatron. 2004, 16, 482–488. [Google Scholar] [CrossRef]
- Brokaw, E.; Black, I.; Holley, R.; Lum, P. Hand spring operated movement enhancer (handsome): A portable, passive hand exoskeleton for stroke rehabilitation. IEEE Trans. Neuro Syst. Rehabil. Eng. 2011, 19, 391–399. [Google Scholar] [CrossRef] [PubMed]
- Borboni, A.; Mor, M.; Faglia, R. Gloreha—Hand Robotic Rehabilitation: Design, Mechanical Model, and Experiments. J. Dyn. Syst. Meas. Control. 2016, 138, 111003. [Google Scholar] [CrossRef]
- Hasegawa, Y.; Mikami, Y.; Watanabe, K.; Sankai, Y. Five-fingered assistive hand with mechanical compliance of human finger. ICRA 2008. In Proceedings of the IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 718–724. [Google Scholar]
- Chiri, A.; Vitiello, N.; Giovacchini, F.; Roccella, S.; Vecchi, F.; Carrozza, M.C. Mechatronic Design and Characterization of the Index Finger Module of a Hand Exoskeleton for Post-Stroke Rehabilitation. IEEE/ASME Trans. Mechatron. 2012, 17, 884–894. [Google Scholar] [CrossRef]
- Cempini, M.; De Rossi, S.M.M.; Lenzi, T.; Cortese, M.; Giovacchini, F.; Vitiello, N.; Carrozza, M.C. Kinematics and design of a portable and wearable exoskeleton for hand rehabilitation. In Proceedings of the IEEE International Conference on Robotics and Automation, Seattle, WA, USA, 24–26 June 2013; pp. 1–6. [Google Scholar]
- Festo. Festo Exohand Characteristics. 2012. Available online: https://www.festo.com/group/en/cms/10233.htm (accessed on 4 June 2020).
- Kazerooni, H. Exoskeletons for human power augmentation. In Proceedings of the IEEE/RSJ International Conference on Kinematics and Design of a Portable and Wearable Exoskeleton for Hand Rehabilitation, Edmonton, AB, Canada, 2–6 August 2005; pp. 3459–3464. [Google Scholar]
- Jamshed, I.A.; Tsagarakis Nikos, G.; Caldwell, D.G. A portable rehabilitation device for the hand. In Proceedings of the 32nd Annual International Conference of the IEEE EMBS, Buenos Aires, Argentina, 11 November 2010; pp. 3694–3697. [Google Scholar]
- Schabowsky, C.; Godfrey, S.B.; Holley, R.J.; Lum, P.S. Development and pilot testing of HEXORR: Hand EXOskeleton Rehabilitation Robot. J. Neuroeng. Rehabil. 2010, 17, 6–28. [Google Scholar] [CrossRef] [PubMed]
- Iqbal, J.; Tsagarakis, N.; Caldwell, D. Human hand compatible underactuated exoskeleton robotic system. Electron. Lett. 2014, 50, 494–496. [Google Scholar] [CrossRef]
- Wege, A.; Kondak, K.; Hommel, G. Mechanical design and motion control of a hand exoskeleton for rehabilitation. In Proceedings of the IEEE International Conference on Mechatronics and Automation, Niagara Falls, ON, Canada, 29 July–1 August 2005; Volume 1, pp. 155–159. [Google Scholar]
- Worsnopp, T.; Peshkin, M.; Colgate, J.; Kamper, D. An actuated finger exoskeleton for hand rehabilitation following stroke. In Proceedings of the IEEE 10th International Conference on Rehabilitation Robotics, Noordwijk, The Netherlands, 14 January 2008; pp. 896–901. [Google Scholar]
- Iqbal, J.; Tsagarakis, N.; Caldwell, D. A human hand compatible optimized exoskeleton system. In Proceedings of the IEEE International Conference on Robotics and Biomimetics, Tianjin, China, 14–18 December 2010; pp. 685–690. [Google Scholar]
- Fontana, M.; Dettori, A.; Salsedo, F.; Bergamasco, M. Mechanical design of a novel hand exoskeleton for accurate force displaying. In Proceedings of the IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 1704–1709. [Google Scholar]
- Burton, T.; Vaidyanathan, R.; Burgess, S.; Turton, A.; Melhuish, C. Development of a parametric kinematic model of the human hand and a novel robotic exoskeleton. In Proceedings of the IEEE International Conference on Rehabilitation Robotics, Zurich, Switzerland, 29 June–1 July 2011; pp. 1–7. [Google Scholar]
- Fontana, M.; Fabio, S.; Marcheschi, S.; Bergamasco, M. Haptic Hand Exoskeleton for Precision Grasp Simulation. J. Mech. Robot. 2013, 5, 041014. [Google Scholar] [CrossRef]
- Aubin, P.; Petersen, K.; Sallun, H. A pediatric robotic thumb exoskeleton for at-home rehabilitation. Int. J. Intell. Comput. Cybern. 2014, 7, 233–252. [Google Scholar] [CrossRef]
- Wu, J.; Huang, J.; Wang, Y.; Xing, K. RLSESN-based PID adaptive control for a novel wearable rehabilitation robotic hand driven by PM-TS actuators. Int. J. Intell. Comput. Cybern. 2012, 5, 91–110. [Google Scholar] [CrossRef]
- Enriquez, S.C.; Narváez, Y.; Vivas, O.A.; Diez, J.; Badesa, F.J.; Sabater, J.M.; Garcia-Aracil, N. Sistema robótico de tipo exoesqueleto para rehabilitación de la mano 2014. In Actas de las XXXV Jornadas de Automática; Comité Español de Automática de la IFAC: Madrid, Spain, September 2014. [Google Scholar]
- Yap, H.K.; Lim, J.H.; Nasrallah, F.; Goh, J.C.H.; Yeow, R.C.H. A Soft Exoskeleton for Hand Assistive and Rehabilitation Application using Pneumatic Actuators with Variable Stiffness. In Proceedings of the IEEE International Conference on Robotics and Automation, Seattle, WA, USA, 26–30 May 2015. [Google Scholar]
- Matheson, E.; Brooker, G. Assistive Rehabilitation Robotic Glove. In Proceedings of the Australasian Conference on Robotics and Automation, Melbourne, Australia, 7–9 December 2011; pp. 1–10. [Google Scholar]
- Cempini, M.; Marzegan, A.; Rabuffetti, M.; Cortese, M.; Vitiello, N.; Ferrarin, M. Analysis of relative displacement between the HX wearable robotic exoskeleton and the user’s hand. J. Neuroeng. Rehabil. 2014, 11, 1–8. [Google Scholar] [CrossRef] [PubMed]
- Stoll, W. New scope for Interaction between Humans and Machines; Festo AG & Co. KG: Esslingen, Germany, 2012. [Google Scholar]
- Ma, Z.; Ben-Tzvi, P.; Danoff, J. Modeling human hand and sensing hand motions with the five-fingered haptic glove mechanism. In Proceedings of the ASME International Design Engineering Technical Conferences & Computers and Information in Engineering Conference, Buffalo, NY, USA, 17–20 August 2014. [Google Scholar]
- Wang, F.; Shastri, M.; Jones, L.C.; Gupta, V.; Osswald, C.; Kang, X.; Kamper, G.D.; Sarkar, N. Design and control of an actuated thumb exoskeleton for hand rehabilitation following stroke. In Proceedings of the IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011. [Google Scholar]
- Jiting, L.; Shuang, W.; Ju, W.; Ruoyin, Z.; Yuru, Z.; Zhongyuan, C. Development of a Hand Exoskeleton System for Index Finger Rehabilitation. Chin. J. Mech. Eng. 2011, 24, 223–233. [Google Scholar]
- Iqbal, J.; Khan, H.; Tsagarakis, G.N. A novel exoskeleton robotic system for hand rehabilitation conceptualization to prototyping. Elsevier Biocybern. Biomed. Eng. 2014, 34, 79–89. [Google Scholar] [CrossRef]
- Available online: https://freepikpsd.com/handpng/639314/ (accessed on 20 March 2021).
- Actuonix. Available online: https://www.actuonix.com/L12-Micro-Linear-Actuators-s/1821.htm (accessed on 12 April 2021).
- Kiat, N.P.; Saptari, A. Hand Anthropometry: A Descriptive Analysis on Elderly Malaysians. In Adult Elderly Anthropometry; 2013; pp. 193–198. [Google Scholar]
- Myszka, D.H. Machines and Mechanisms, 4th ed.; Pearson: Mexico City, Mexico, 2012. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System | Developer | Force Transmission | DOF | Actuator | Material | Range Movement |
|---|---|---|---|---|---|---|
| WaveFlex | Medcom group | Transmission | 1 | DC motor | - | MCP: 0–90° PIP: 0–110° DIP: 0–70° |
| HandSOME | Catholic University of America | Linkage | 1 | Elastic cords | Aluminum | CMC: 52°; MCP: 90° |
| Gloreha | Universita degli Studi di Brescia | Cable | 1 | Pneumatic | - | - |
| Lambercy | Rehabilitation Engineering Lab ETH Zurich, Switzerland | Fourbar linkage | 1 | Linear actuator | - | CMC 40° |
| HEXOSYS | University of Genova, Italy | Linkage | 1 | DC motor | Plastic Aluminum | - |
| IOTA | Wyss Institute for Biologically Inspired Engineering, Harvard | Spring-return cable transmission | 2 | Dynamixel AX-12A servo motors. | Delrin and Aluminum | CMC: 67°; MCP: 67° |
| PM-TS | Huazhong University of Science and Technology | Cable | 2 | Pneumatic | Thermoplastic | MCP: 70°; PIP: 90° |
| EXOGLOVE | National University of Singapore | Pneumatic bending actuators | 3 | Pneumatic | Elastomero | DIP: 50.8° PIP: 45.4° MCP: 68.1° |
| ASSISTITIVE REHABILITATION ROBOTIC GLOVE | Australian Centre for Field Robotics | Pneumatic muscle | 3 | Pneumatic | - | - |
| HX | Scuola Superiore Sant’Anna | Pulleys and a cable | 2 | DC Motor | - | - |
| EXOHAND | Festo | DFK-10 cylinders from FESTO | - | Pneumatic | Polyamide | - |
| FIVE-FINGERED HAPTIC GLOVE DESIGN | George Washington University | Linkage | 3 | DC Motor | Thermoplastic | MCP 60° DIP 50° PIP 30° |
| ATX | TRUMPF Photonics Inc. | Linkage | 5 | DC Motor | Aluminum | - |
| AFX | - | Cable | 3 | DC Servomotor | Aluminum, D2 steel | MCP: −15°–75° PIP: 0–90° DIP: 0–75° |
| EXORR | - | Linkage | Brushless motor | Aluminum | - |
| Link/Phalanx | Joint | Length (m) | Range Movement | |
|---|---|---|---|---|
| Proximal L1 | MCP | Index | 0.0238 | 26° |
| Middle | 0.0254 | |||
| Ring | 0.0220 | |||
| Little | 0.0181 | |||
| Thumb | 0.0288 | |||
| Media L2 | PIP | Index | 0.0187 | 43° |
| Middle | 0.0224 | |||
| Ring | 0.0212 | |||
| Little | 0.0163 | |||
| Thumb | N/A | |||
| Distal L3 | DIP | Index | 0.0224 | 43° |
| Middle | 0.0237 | |||
| Ring | 0.0214 | |||
| Little | 0.0202 | |||
| Thumb | 0.0289 | |||
| Phalange | Range of Motion (°) | |||
|---|---|---|---|---|
| Proposed | Distance | Obtained | Distance | |
| Proximal | 0–26 | 26 | 45.06–70.11 | 25.05 |
| Media | 0–43 | 43 | 110.07–152.76 | 42.69 |
| Distal | N/A | N/A | N/A | N/A |
| Joint | Value | Length (m) | Coordinator (m) | ||
|---|---|---|---|---|---|
| MCP(q1) | 25.89° | 0.0203 | X1 | Y1 | Z1 |
| PIP(q2) | 42.37° | 0.0183 | 0.0089 | N/A | |
| DIP(q3) | 43.51° | 0.0187 | X2 | Y2 | Z2 |
| N/A | N/A | N/A | |||
| 0.0202 | X3 | Y3 | Z3 | ||
| 0.0174 | 0.0452 | N/A | |||
| Phalanges | L1/MCP | L2/PIP | L3/DIP | |
|---|---|---|---|---|
| Length (m) | 0.0238 | 0.0187 | - | |
| Joint (rad) | 13π/90 | 43π/180 | - | |
| Mass (kg) | 0.094785 | 0.008337 | - | |
| Center of mass | 0.007336 | 0.0006577 | - | |
| Inertia | Ixx | 0.001289 | 0.0006562 | - |
| Iyy | 0.001286 | 0.0006562 | - | |
| Izz | 0.00000404 | 0.00000240 | - | |
| Phalange | Joints | Torque (Nm) | |
|---|---|---|---|
| Maximum | Minimum | ||
| Proximal | MCP | 0.0170 | 0.0068 |
| Media | PIP | 9.5847 × 10−4 | −7.9009 × 10−4 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hernández-Santos, C.; Davizón, Y.A.; Said, A.R.; Soto, R.; Félix-Herrán, L.C.; Vargas-Martínez, A. Development of a Wearable Finger Exoskeleton for Rehabilitation. Appl. Sci. 2021, 11, 4145. https://doi.org/10.3390/app11094145
Hernández-Santos C, Davizón YA, Said AR, Soto R, Félix-Herrán LC, Vargas-Martínez A. Development of a Wearable Finger Exoskeleton for Rehabilitation. Applied Sciences. 2021; 11(9):4145. https://doi.org/10.3390/app11094145
Chicago/Turabian StyleHernández-Santos, Carlos, Yasser A. Davizón, Alejandro R. Said, Rogelio Soto, L.C. Félix-Herrán, and Adriana Vargas-Martínez. 2021. "Development of a Wearable Finger Exoskeleton for Rehabilitation" Applied Sciences 11, no. 9: 4145. https://doi.org/10.3390/app11094145
APA StyleHernández-Santos, C., Davizón, Y. A., Said, A. R., Soto, R., Félix-Herrán, L. C., & Vargas-Martínez, A. (2021). Development of a Wearable Finger Exoskeleton for Rehabilitation. Applied Sciences, 11(9), 4145. https://doi.org/10.3390/app11094145