
Development and Prospect of UAV-Based Aerial Electrostatic Spray Technology in China

 ,
, 

Abstract
1. Introduction
2. Early Exploration of Aerial Electrostatic Spray Technology in China
2.1. Hardware Structure Improvement
2.2. Research on Mechanism of Influencing Factors
3. Rapid Progress of UAV-Based Electrostatic Spray Technology
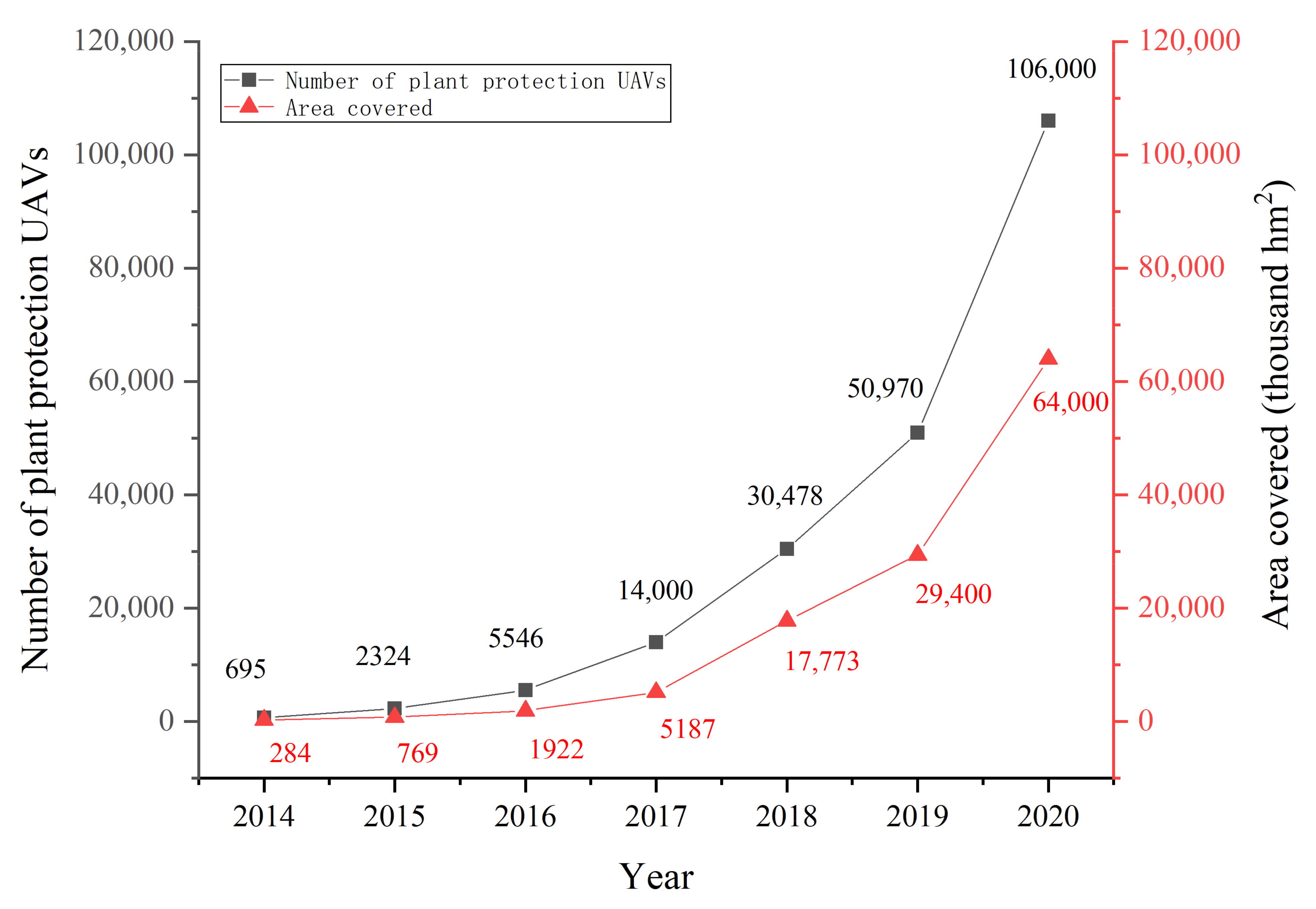
3.1. Research Background
3.2. Beginning of the Research on UAV-Based Electrostatic Spray Technology
3.3. Continuous Optimization of UAV-Based Electrostatic Spray Technology
3.4. Spray Efficiency Experiments of UAV-Based Electrostatic Spray Technology
3.5. Summary
4. Analysis and Prospects
4.1. Measurement Technology of Charged Droplets
4.2. Impact of UAV Rotor Wind Field on Charged Droplets
4.3. Comparative Study of Various Charging Methods
4.4. Accumulation of Aerial Electrostatic Spray Technology Research Based on Agricultural UAVs
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, Y.L.; Lan, Y.B.; Fritz, B.K.; Xue, X.Y. Development of aerial electrostatic spraying systems in the United States and applications in China. Trans. Chin. Soc. Agric. Eng. 2016, 32, 1–7, (In Chinese with English abstract). [Google Scholar] [CrossRef]
- Martin, D.E.; Latheef, M.A. Efficacy of electrostatically charged glyphosate on ryegrass. J. Electrost. 2017, 90, 45–53. [Google Scholar] [CrossRef]
- Tavares, R.M.; Cunha, J.P.; Alves, T.C.; Bueno, M.R.; Silva, S.M.; Zandonadi, C.H. Electrostatic spraying in the chemical control of Triozoida limbata (Enderlein) (Hemiptera: Triozidae) in guava trees (Psidium guajava L.). Pest Manag. Sci. 2016, 73, 1148–1153. [Google Scholar] [CrossRef] [PubMed]
- Martin, D.E.; Latheef, M.A.; López, J.D. Electrostatically charged aerial application improved spinosad deposition on early season cotton. J. Electrost. 2019, 97, 121–125. [Google Scholar] [CrossRef]
- Carlton, J.B.; Isler, D.A. Development of a device to charge aerial sprays electrostatically. Agric. Aviat. 1966, 8, 44–51. [Google Scholar]
- Carlton, J.B. Technique to Reduce Chemical Usage and Concomitant Drift from Aerial Sprays. United States Department of. Agriculture Patents No. 5975425, 2 November 1999. [Google Scholar]
- Spectrum Electrostatic Sprayers, Inc. Available online: http://spectrumsprayer.com/company.html (accessed on 11 May 2020).
- Inculet, I.I.; Fischer, J.K. Electrostatic aerial spraying. IEEE Trans. Ind. Appl. 1989, 25, 558–562. [Google Scholar] [CrossRef]
- Da Cunha, J.P.A.R.; Barizon, R.R.M.; Ferracini, V.L. Assalin, Spray drift and caterpillar and stink bug control from aerial applications with electrostatic charge and atomizer on soybean crop. Eng. Agrícola 2017, 37, 1163–1170. [Google Scholar] [CrossRef]
- Martin, D.E.; Latheef, M.A.; Lopez, J.D.; Duke, S.E. Aerial Application Methods for Control of Weed Species in Fallow Farmlands in Texas. Agronomy 2020, 10, 1764. [Google Scholar] [CrossRef]
- Anon. Introduce a new technology of pesticide application-electrostatic spray. For. Sci. Technol. 1974, 1, 18. [Google Scholar]
- Anon. Preliminary test of pesticide electrostatic spray. For. Sci. Technol. 1978, 2, 16–17. [Google Scholar]
- He, X.K.; Yan, K.R.; Chu, J.Y.; Wang, J.; Zeng, A.J.; Liu, Y.J. Design and testing of the automatic target detecting, electrostatic, air assisted, orchard sprayer. Nongye Gongcheng Xuebao Trans. Chin. Soc. Agric. Eng. 2003, 19, 78–80, (In Chinese with English abstract). [Google Scholar]
- Yu, Y.C.; Wang, B.H.; Shi, J.Z.; Li, X.F. Design and experimental study of combined-charging hydraulic electrostatic spraying box. Trans. Chin. Soc. Agric. Eng. 2005, 21, 85–88, (In Chinese with English abstract). [Google Scholar]
- Zhang, J.; Zheng, J.Q. Experiment on the variations of droplet diameter distribution and local flow rate over radial direction for the electrostatic spray process. Trans. Chin. Soc. Agric. Eng. 2009, 25, 104–109, (In Chinese with English abstract). [Google Scholar] [CrossRef]
- Jia, W.D.; Hu, H.C.; Chen, L.; Chen, Z.G.; Wei, X.H. Performance experiment on spray atomization and droplets deposition of wind-curtain electrostatic boom spray. Trans. Chin. Soc. Agric. Eng. 2015, 31, 53–59, (In Chinese with English abstract). [Google Scholar] [CrossRef]
- Zhou, L.F.; Zhang, L.; Xue, X.Y.; Qin, W.C.; Sun, Z.; Zhou, Q.Q.; Chen, C. Design and test of double air channel auxiliary electrostatic sprayer. Jiangsu Agric. Sci. 2017, 45, 192–196, (In Chinese with English abstract). [Google Scholar] [CrossRef]
- Ma, X.; Guo, L.J.; Wen, Z.C.; Wei, Y.H.; Xiao, R.H.; Zeng, H. Atomization characteristics of multi-nozzle electrostatic spray and field experiment. Trans. Chin. Soc. Agric. Eng. 2020, 36, 73–82, (In Chinese with English abstract). [Google Scholar] [CrossRef]
- Dai, Q.F.; Hong, T.S.; Song, S.R.; Li, Z.; Chen, J.Z. Influence of pressure and pore diameter on droplet parameters of hollow cone nozzle in pipeline spray. Trans. Chin. Soc. Agric. Eng. 2016, 32, 97–103, (In Chinese with English abstract). [Google Scholar] [CrossRef]
- Luan, H.; Zhang, Q.; Wang, W.X. Installation and modification of Z03K000B electrostatic spray system and flight tests. Xin-jiang Reclam. Technol. 2006, 5, 46–47, (In Chinese with English abstract). [Google Scholar]
- Zhang, Y.L.; Huang, X.R.; Wang, L.L.; Deng, J.Z.; Zeng, W.; Lan, Y.B.; Muhammad, N.T. Progress in foreign agricultural aviation electrostatic spray technologies and references for China. Trans. Chin. Soc. Agric. Eng. 2021, 37, 50–59, (In Chinese with English abstract). [Google Scholar] [CrossRef]
- Ru, Y.; Zheng, J.Q.; Zhou, H.P.; Shu, C.R. Design and experiment of double nozzle of aerial electrostatic sprayer. Trans. Chin. Soc. Agric. Mach. 2007, 38, 58–61. [Google Scholar]
- Zhou, H.P.; Ru, Y.; Shu, C.R.; Jia, Z.C. Improvement and experiment of aerial electrostatic spray device. Trans. Chin. Soc. Agric. Eng. 2012, 28, 7–12, (In Chinese with English abstract). [Google Scholar] [CrossRef]
- Ru, Y.; Jin, L.; Zhou, H.P.; Shu, C.R. Effect of high-voltage electrostatic field on droplet charging based on cone-shaped electrode. High Volt. Eng. 2014, 40, 2721–2727, (In Chinese with English abstract). [Google Scholar] [CrossRef]
- Jin, L.; Ru, Y.; Sun, M.L.; Jia, Z.C.; Wang, B.X. Performance experiments of aerial electrostatic nozzle with cone shaped electrode. J. Nanjing For. Univ. (Nat. Sci. Ed.) 2015, 39, 155–160, (In Chinese with English abstract). [Google Scholar] [CrossRef]
- Yang, Z.; Niu, M.M.; Li, J.; Xu, X.; Sun, Z.Q.; Xue, K.P. Influence of lateral wind and electrostatic voltage on spray drift of electrostatic sprayer. Trans. Chin. Soc. Agric. Eng. 2015, 31, 39–45, (In Chinese with English abstract). [Google Scholar] [CrossRef]
- Chen, H.L.; Zhao, Y.C. Electrostatic induction field and charging property of droplet in electrostatic spraying process. High Volt. Eng. 2010, 36, 2519–2524, (In Chinese with English abstract). [Google Scholar] [CrossRef]
- Zhang, D.Y.; Lan, Y.B.; Chen, L.P.; Wang, X.; Liang, D. Current status and future trends of agricultural aerial spraying technology in China. Trans. Chin. Soc. Agric. Mach. 2014, 45, 53–59, (In Chinese with English abstract). [Google Scholar] [CrossRef]
- Tian, Z.W.; Xue, X.Y.; Li, L.; Cui, L.F.; Wang, G.; Li, Z.J. Research status and prospects of spraying techology of plant-protection unmanned aerial vehicle. J. Chin. Agric. Mech. 2019, 40, 37–45, (In Chinese with English abstract). [Google Scholar] [CrossRef]
- Li, J.Y.; Lan, Y.B.; Shi, Y.Y. Research progress on airflow characteristics and field pesticide application system of rotary-wing UAV. Trans. Chin. Soc. Agric. Eng. 2018, 34, 104–118, (In Chinese with English abstract). [Google Scholar] [CrossRef]
- Ru, Y.; Jin, L.; Jia, Z.C.; Bao, R.; Qian, X.D. Design and experiment on electrostatic spraying system for unmanned aerial ve-hicle. Trans. Chin. Soc. Agric. Eng. 2015, 32, 42–47, (In Chinese with English abstract). [Google Scholar] [CrossRef]
- Wang, Y.T.; Wu, K.H. Research on an electrostatic spraying system for multi-rotor plant protection UAV. Jiangsu Agric. Sci. 2020, 48, 225–230, (In Chinese with English abstract). [Google Scholar] [CrossRef]
- Jin, L.; Ru, Y. Research on UAV-based aerial electrostatic spraying system. J. Agric. Mech. Res. 2016, 38, 227–230, (in Chinese with English abstract). [Google Scholar] [CrossRef]
- Lian, Q. Experimental Research on Electrostatic Spray System of Multi-Rotor UAV. Master’s Thesis, Heilongjiang Bayi Agricultural University, Daqing, China, 2016. [Google Scholar]
- Cai, Y.L. Design and Test of Contact Electrostatic Spray System for Low-Altitude UAV. Master’s Thesis, Jiangsu University, Zhenjiang, China, 2017. [Google Scholar]
- Zhao, D.N.; Lan, Y.B.; Shen, W.G.; Wang, S.Z.; Abhishek, D. Development of a charge transfer space loop to improve ad-sorption performance in aerial electrostatic spray. Int. J. Agric. Biol. Eng. 2020, 13, 50–55. [Google Scholar] [CrossRef]
- Yanliang, Z.; Qi, L.; Wei, Z. Design and test of a six-rotor unmanned aerial vehicle (UAV) electrostatic spraying system for crop protection. Int. J. Agric. Biol. Eng. 2017, 10, 68–76. [Google Scholar] [CrossRef]
- Bu, J.Z. Experimental Study on Deposition and Drift Characteristics of Electrostatic Spray for Large-Load Unmanned Helicopter. Master’s Thesis, Jiangsu University, Zhenjiang, China, 2019. [Google Scholar]
- Wu, Y.; Lu, J.; Wang, Y. Research on Multiresponse Robustness Optimization for Unmanned Aerial Vehicle Electrostatic Spray System. Fundam. Mach. Theory Mech. 2020, 77, 719–728. [Google Scholar] [CrossRef]
- Lu, J.J.; Chen, J.D.; Wu, Y.D.; Wang, B. Agricultural aviation research aeronautical electrostatic spray system performance. J. Agric. Mech. Res. 2019, 41, 174–179, (In Chinese with English abstract). [Google Scholar] [CrossRef]
- Zhao, D.N.; Lan, Y.B.; Shen, W.G. Building of aerial electrostatic spraying system and exploration on the influencing factors of droplet deposition effect. J. Agric. Mech. Res. 2021, 43, 204–207, (In Chinese with English abstract). [Google Scholar] [CrossRef]
- Wang, J.F.; Gu, W.K.; Wang, X.Y.; Chu, J.J. Experimental study on charging performance and spray characteristics of induction charged spray. High Volt. Eng. 2015, 41, 504–509, (In Chinese with English abstract). [Google Scholar] [CrossRef]
- Lan, Y.B.; Zhang, H.Y.; Wen, S.; Li, S.H. Analysis and experiment on atomization characteristics and spray deposition of electrostatic nozzle. Trans. Chin. Soc. Agric. Mach. 2018, 49, 130–139, (In Chinese with English abstract). [Google Scholar] [CrossRef]
- Li, Y.F.; Hu, J.; Li, Q.D.; Zhao, M.M. Study on influencing factors of airborne electrostatic fog trapping. Trans. Chin. Soc. Agric. Mach. 2019, 41, 171–176, (In Chinese with English abstract). [Google Scholar] [CrossRef]
- Wang, S.L.; He, X.K.; Song, J.L.; Zhong, C.S.; Wang, Z.C.; Qi, P.; Ling, Y. Charging and spraying performance test of bipolar contact electrostatic spraying system for unmanned aerial vehicle. Trans. Chin. Soc. Agric. Eng. 2018, 34, 82–89, (In Chinese with English abstract). [Google Scholar] [CrossRef]
- Liu, W.L. Design and Experiment of Electrostatic Spraying System for Plant Protection Unmanned Aerial Vehicle. Master’s Thesis, South China Agricultural University, Guangzhou, China, 2017. [Google Scholar]
- Zhao, S.; Castle, G.P.; Adamiak, K. Comparison of conduction and induction charging in liquid spraying. J. Electrost. 2005, 63, 871–876. [Google Scholar] [CrossRef]
- Agropages. China’s Crop Protection UAV Development Report 2020. Available online: http://news.agropages.com/News/NewsDetail---38284.htm (accessed on 17 March 2021).
- Kirk, I.W.; Hoffmann, W.C.; Carlton, J.B. Aerial electrostatic spray system performance. Trans. ASAE 2001, 44, 1089–1092. [Google Scholar] [CrossRef]
- Martin, D.E.; Latheef, M.A. Aerial electrostatic spray deposition and canopy penetration in cotton. J. Electrost. 2017, 90, 38–44. [Google Scholar] [CrossRef]
- Dai, Y.; Law, S. Modeling the transient electric field produced by a charged pollen cloud entering a flower. In Proceedings of the IAS ’95. Conference Record of the 1995 IEEE Industry Applications Conference Thirtieth IAS Annual Meeting, Orlando, FL, USA, 8–12 October 1995; Institute of Electrical and Electronics Engineers (IEEE): New York, NY, USA, 2002; Volume 2, pp. 1395–1402. [Google Scholar]
- Law, S.E. Electrostatic Pesticide Spraying: Concepts and Practice. IEEE Trans. Ind. Appl. 1983, 2, 160–168. [Google Scholar] [CrossRef]
- Martin, D.E.; Lopez, J.D.; Hoffmann, W.C.; Fritz, B.K.; Lan, Y. Field Evaluation of Spinosad Aerial Applications for Thrips Control on Cotton1. Southwest. Èntomol. 2007, 32, 221–228. [Google Scholar] [CrossRef]
- Zhang, R.R.; Chen, L.P.; Lan, Y.B.; Xu, G.; Kan, J.; Zhang, D.Y. Development of a deposit sensing system for aerial spraying application. Trans. Chin. Soc. Agric. Mach. 2014, 45, 123–127, (In Chinese with English abstract). [Google Scholar] [CrossRef]
- He, Y.; Wu, J.J.; Fang, H.; Zheng, Q.S.; Xiao, S.P.; Cen, H.Y. Research on deposition effect of droplets based on plant protection unmanned aerial vehicle: A review. J. Zhejiang Univ. (Agric. Life Sci.) 2018, 44, 392–398, (In Chinese with English abstract). [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Device | Charged Mode | Test Target | Test Method | Evaluating Indicator | Test Environment | Researchers and Affiliation |
|---|---|---|---|---|---|---|
| XY8D UAV | Induction | Rice | Different flight height | Droplet deposition characteristics | Field test | Ru, et al., Nanjing Forestry University |
| AF-811 unmanned helicopter | Induction | Copy paper | Comparison of electrostatic spray and non-electrostatic spray | Effective spray amplitude and droplet deposition characteristics | Outdoor | Jin, et al., Nanjing Forestry University |
| YG20-6 type six-rotor UAV | Induction | Water sensitive paper | Comparison of electrostatic spray and non-electrostatic spray | Measurement of effective spray amplitude, droplet penetration, and droplet deposition | Outdoor | Lian, Heilongjiang Bayi Agricultural University |
| F-50 plant-based unmanned helicopter | Contact | Sample tape, rice | Comparison of different charge modes (non-electrostatic, induction electrostatic, contact electrostatic) | Droplet deposition measurement and coefficient of variation of deposition amount | Field test | Cai, Jiangsu University |
| HY-B-15L single rotor plant protection unmanned helicopter, TXA micro six-rotor UAV | Induction | Crossbreeding rice, Cotton picked by machine | Comparison of different water agents, number of rotors, and crops | Droplet deposition characteristics and pharmacodynamics | Field test | Liu, South China Agricultural University |
| Integrated spray test stand | Induction | Water sensitive paper | Comparison of electrostatic spray and non-electrostatic spray | Density of droplet deposition | Indoor | Zhang et al., Heilongjiang Bayi Agricultural University |
| 3WQF120-12 oil-operated single-rotor plant protection UAV | Contact | wheat | Comparison between electrostatic oil agent and conventional water-based agent, electrostatic spray and conventional spray system | Distribution uniformity of droplet deposition and its control effect on wheat aphid and rust | Field test | Wang et al., China Agriculture University |
| FR-200 type large-load unmanned helicopter | Induction | Water sensitive paper | Charged voltage, flight speed, flight height, and crosswind wind speed | Droplet deposition characteristics and droplet drift rate | Field test | Bu, Jiangsu University |
| response surface methodology (RSM) | Induction | - | Nozzle diameter, nozzle pressure, and electrostatic voltage | Droplet deposition characteristics and charge to mass ratio | Simulation | Wu et al., Guizhou University |
| Gaoke M45 plant protection UAV | Contact | Mock target | Comparison of electrostatic spray and non-electrostatic spray | Droplet deposition characteristics | Outdoor | Zhao et al., Shandong University of Technology |
| W730S four-rotor semi-automatic plant protection UAV | Induction | Effusion cylinder | - | Droplet deposition measurement and spray flow stability | Indoor | Wang et al., Hangzhou Dianzi University |
| An indoor spray bar electrostatic spray system test platform | Induction | Water sensitive paper | Nozzle diameter, nozzle pressure, and spraying height | Droplet deposition characteristics | Indoor | Lu et al., Guizhou University |
| Aerial electrostatic spraying system suspension test bench | Contact | Art Paper | Spraying height, spray time, and charging voltage | Droplet deposition characteristics and back-front ratio | Indoor | Zhao et al., Shandong University of Technology |
| Charge aerosol spray test bench | Induction | White plastic board | Charging voltage, spray pressure, electrode ring diameter, and electrode spacing | Spray charge-to-mass ratio and droplet size | Indoor | Wang et al., Jiangsu University |
| Fixed spray simulator | Induction | Dracaena | Electrode material, charging voltage, spray pressure, and nozzle diameter | Droplet deposition | Indoor | Lan et al., South China Agricultural University |
| Neuroshell | Induction | - | Temperature, humidity, electrode ring diameter, charging voltage, and nozzle flow | Spray charge-to-mass ratio | Simulation | Li et al., Heilongjiang Bayi Agricultural University |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Huang, X.; Lan, Y.; Wang, L.; Lu, X.; Yan, K.; Deng, J.; Zeng, W. Development and Prospect of UAV-Based Aerial Electrostatic Spray Technology in China. Appl. Sci. 2021, 11, 4071. https://doi.org/10.3390/app11094071
Zhang Y, Huang X, Lan Y, Wang L, Lu X, Yan K, Deng J, Zeng W. Development and Prospect of UAV-Based Aerial Electrostatic Spray Technology in China. Applied Sciences. 2021; 11(9):4071. https://doi.org/10.3390/app11094071
Chicago/Turabian StyleZhang, Yali, Xinrong Huang, Yubin Lan, Linlin Wang, Xiaoyang Lu, Kangting Yan, Jizhong Deng, and Wen Zeng. 2021. "Development and Prospect of UAV-Based Aerial Electrostatic Spray Technology in China" Applied Sciences 11, no. 9: 4071. https://doi.org/10.3390/app11094071
APA StyleZhang, Y., Huang, X., Lan, Y., Wang, L., Lu, X., Yan, K., Deng, J., & Zeng, W. (2021). Development and Prospect of UAV-Based Aerial Electrostatic Spray Technology in China. Applied Sciences, 11(9), 4071. https://doi.org/10.3390/app11094071