
A Magnetic Field Camera for Real-Time Subsurface Imaging Applications

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
Featured Application
Abstract
1. Introduction
2. Materials and Methods
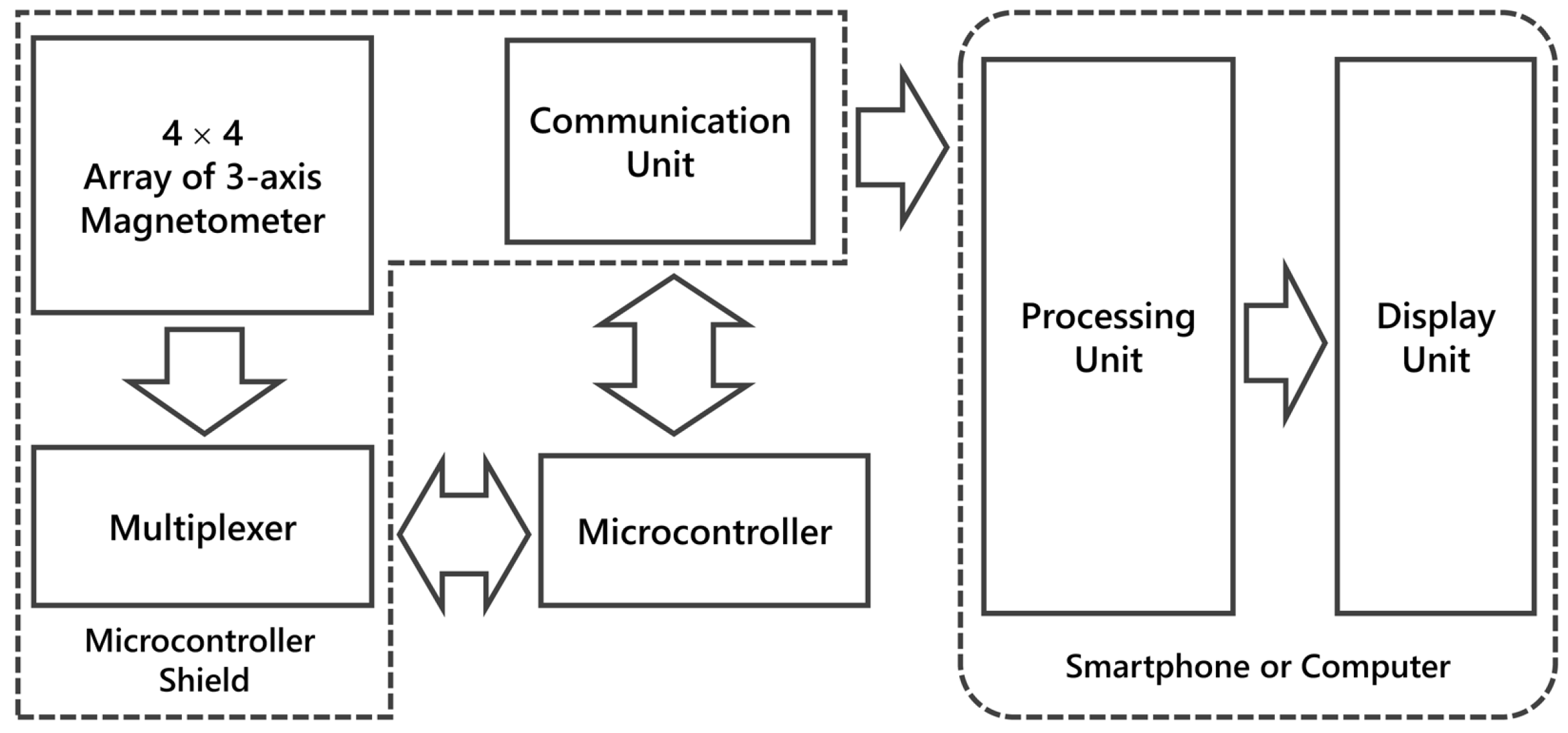
2.1. B-Camera: A Magnetic Field Camera
2.2. Construction of the B-Camera
2.2.1. Sensor Array and Multiplexer
2.2.2. Microcontroller Unit
2.2.3. Communication Unit
2.2.4. PDU (Processing and Display Unit)
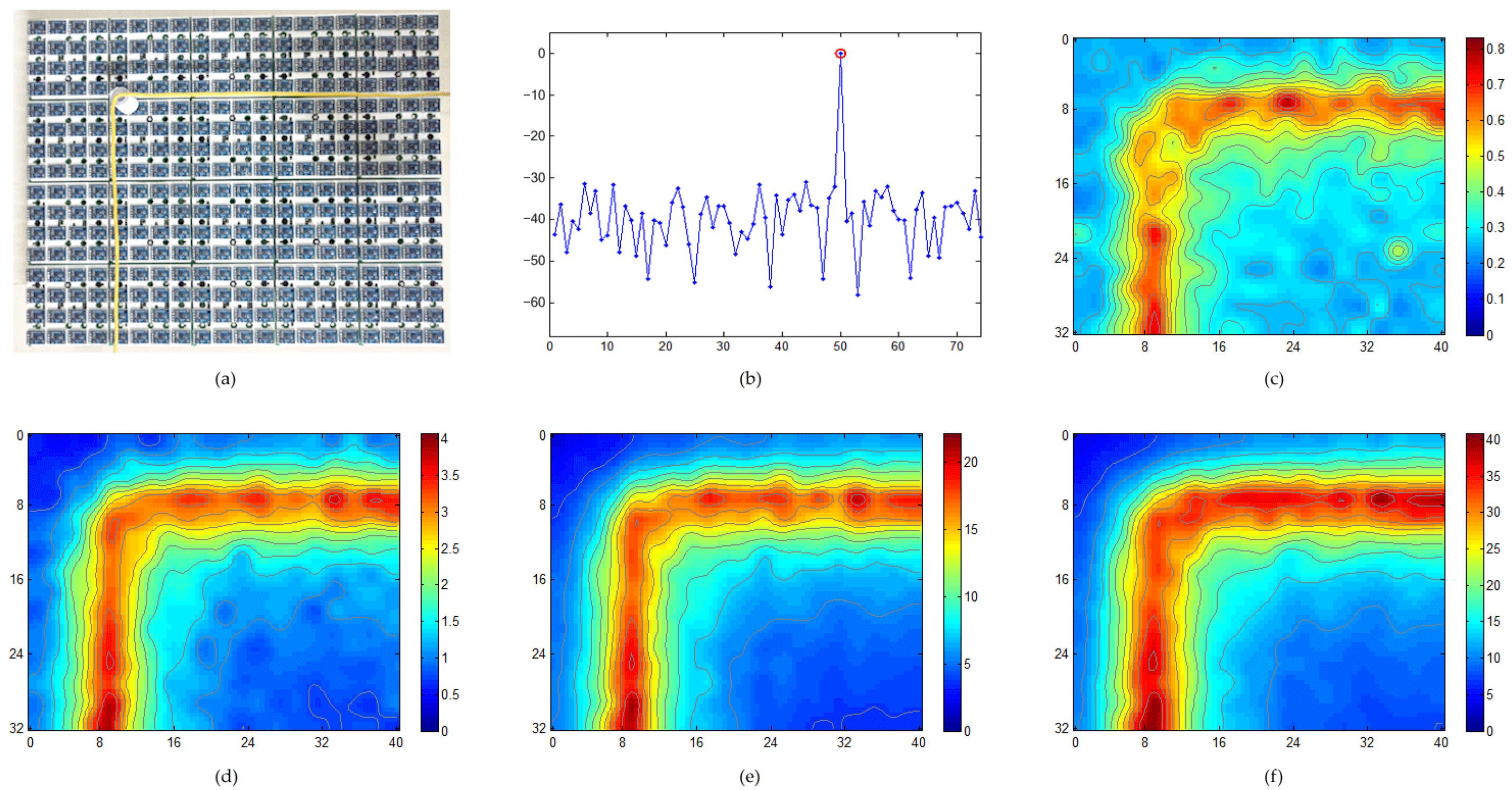
2.3. B-Camera with Larger Sensor Array
3. Experiments and Analysis
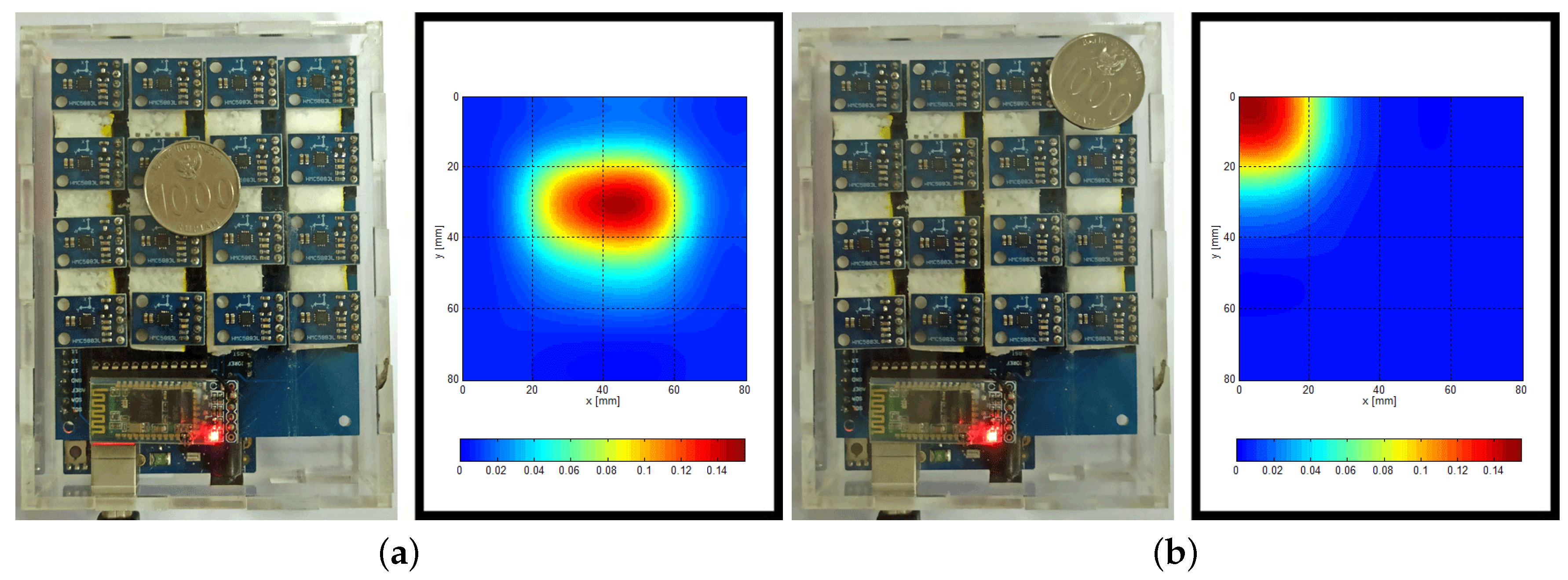
3.1. Imaging a Coin with a Smartphone-Based PDU
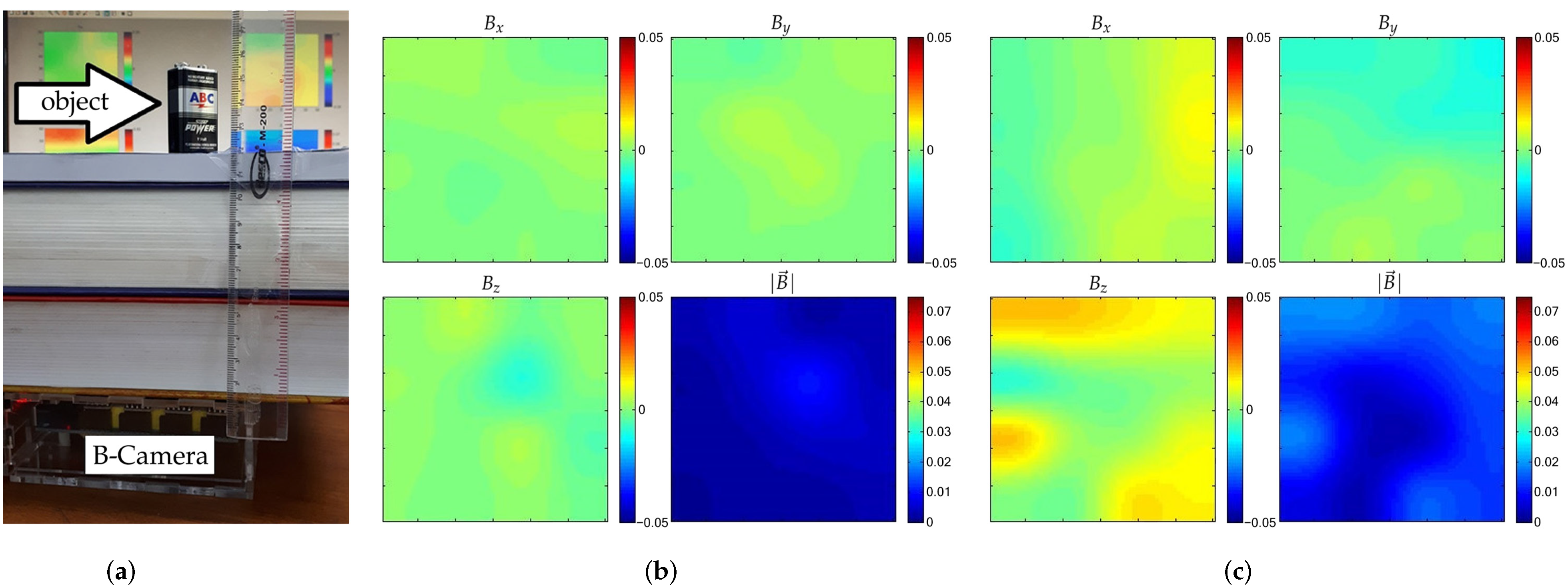
3.2. Observation of a Hidden Object
3.3. Imaging a Loaded Power-Line Cable
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Suksmono, A.B.; Danudirdjo, D.; Setiawan, A.; Rahmawati, D. Magnetic subsurface imaging systems in a smartphone based on the built-in magnetometer. IEEE Trans. Magn. 2017, 53, 3200405. [Google Scholar] [CrossRef]
- Larmor, J. Possible rotational origin of magnetic fields of sun and earth. Electr. Rev. 1919, 85, 412. [Google Scholar]
- Mariita, N. The gravity method. In Proceedings of the Short Course II on Surface Exploration for Geothermal Resources (UNU-GTP and KenGen), Lake Naivasha, Kenya, 2–17 November 2007; pp. 1–9. [Google Scholar]
- Orozco, A.; Gaudestad, J.; Gagliolo, N.E.; Rowlett, C.; Wong, E.; Jeffers, A.; Cheng, B.; Wellstood, F.C.; Cawthorne, A.B.; Infante, F. 3D magnetic field imaging for non-destructive fault isolation. In Proceedings of the ISTFA 2013, San Jose, CA, USA, 3–7 November 2013; pp. 189–193. [Google Scholar]
- Knauss, L.A.; Woods, S.I.; Orozco, A. Current imaging using magnetic field sensors. Microelectron. Fail. Anal. Desk Ref. 2004, 5, 303–311. [Google Scholar]
- McCary, R.; Oliver, D.; Silverstein, K.; Young, J. Eddy current imaging. IEEE Trans. Magn. 1984, 20, 1986–1988. [Google Scholar] [CrossRef]
- Tsukada, K.; Kiwa, T.; Kawata, T.; Ishihara, Y. Low-frequency eddy current imaging using MR sensor detecting tangential magnetic field components for nondestructive evaluation. IEEE Trans. Magn. 2006, 42, 3315–3317. [Google Scholar] [CrossRef]
- Volk, M.; Whitlock, S.; Wolff, C.H.; Hall, B.V.; Sidorov, A.I. Scanning magnetoresistance microscopy of atom chips. Rev. Sci. Instrum. 2008, 79, 023702. [Google Scholar] [CrossRef] [PubMed]
- Joubert, P.Y.; Diraison, Y.L.; Xi, Z.; Vourc’h, E. Pulsed eddy current imaging device for non destructive evaluation applications. In Proceedings of the IEEE-SENSOR 2013, Baltimore, MD, USA, 3–6 November 2013. [Google Scholar]
- Bore, T.; Placko, D.; Joubert, P.-Y. Semi-analytical modeling of an eddy current imaging system for the characterization of defects in metallic structures. In Proceedings of the 2015 IEEE Sensors Applications Symposium (SAS), Zadar, Croatia, 13–15 April 2015. [Google Scholar]
- Cohen, D. Magnetoencephalography: Detection of the brain’s electrical activity with a superconducting magnetometer. Science 1972, 175, 664–666. [Google Scholar] [CrossRef] [PubMed]
- Hämäläinen, M.; Hari, R.; Ilmoniemi, R.J.; Knuutila, J.; Lounasmaa, O.V. Magnetoencephalography—Theory, instrumentation, and applications to noninvasive studies of the working human brain. Rev. Mod. Phys. 1993, 65, 413. [Google Scholar] [CrossRef]
- Baibich, M.N.; Broto, J.M.; Fert, A.; Dau, F.N.V.; Petroff, F.; Etienne, P.; Creuzet, G.; Friederich, A.; Chazelas, J. Giant Magnetoresistance of (001)Fe/(001)Cr Magnetic Superlattices. Phys. Rev. Lett. 1988, 61, 2472. [Google Scholar] [CrossRef] [PubMed]
- Binasch, G.; Grunberg, P.; Saurenbach, F.; Zinn, W. Enhanced magnetoresistance in layered magnetic structures with antiferromagnetic interlayer exchange. Phys. Rev. B 2004, 39, 4828. [Google Scholar] [CrossRef] [PubMed]
- Moodera, J.S.; Kinder, L.R.; Wong, T.M.; Meservey, R. Large Magnetoresistance at Room Temperature in Ferromagnetic Thin Film Tunnel Junctions. Phys. Rev. Lett. 1995, 16, 3273–3276. [Google Scholar] [CrossRef] [PubMed]
- Tuan, B.A.; de Souza-Daw, A.; Hoang, T.M.; Dzung, N.T. Magnetic camera for visualizing magnetic fields of home appliances. In Proceedings of the 2014 IEEE Fifth International Conference on Communications and Electronics (ICCE), Danang, Vietnam, 30 July–1 August 2014; pp. 370–375. [Google Scholar]
- Suksmono, A.B. Interpolation of PSF based on compressive sampling and its application in weak lensing survey. Mon. Not. R. Astron. Soc. 2014, 443, 919–926. [Google Scholar] [CrossRef]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Suksmono, A.B.; Danudirdjo, D.; Setiawan, A.D.; Rahmawati, D.; Prastio, R.P. A Magnetic Field Camera for Real-Time Subsurface Imaging Applications. Appl. Sci. 2021, 11, 3302. https://doi.org/10.3390/app11083302
Suksmono AB, Danudirdjo D, Setiawan AD, Rahmawati D, Prastio RP. A Magnetic Field Camera for Real-Time Subsurface Imaging Applications. Applied Sciences. 2021; 11(8):3302. https://doi.org/10.3390/app11083302
Chicago/Turabian StyleSuksmono, Andriyan Bayu, Donny Danudirdjo, Antonius Darma Setiawan, Dien Rahmawati, and Rizki Putra Prastio. 2021. "A Magnetic Field Camera for Real-Time Subsurface Imaging Applications" Applied Sciences 11, no. 8: 3302. https://doi.org/10.3390/app11083302
APA StyleSuksmono, A. B., Danudirdjo, D., Setiawan, A. D., Rahmawati, D., & Prastio, R. P. (2021). A Magnetic Field Camera for Real-Time Subsurface Imaging Applications. Applied Sciences, 11(8), 3302. https://doi.org/10.3390/app11083302