
3D Acoustic Mapping in Automotive Wind Tunnel: Algorithm and Problem Analysis on Simulated Data

 , , , ,
, , , ,
Abstract
1. Introduction
2. Volumetric Acoustic Inverse Problem Formulation and Data Preprocessing
2.1. Acoustic Direct and Inverse Problems
2.2. Pressure Data Preprocessing
3. Volumetric Acoustic Mapping Based on IRLS
3.1. IRLS Solution Strategy
3.2. IRLS Procedure
- Set the weighting matrix for the current iteration . Calculate using Equation (12), with . Both matrices are normalized, before their multiplication, such that .
- Estimate the regularization parameter for the current iteration using Equation (9).
- Calculate the solution and apply a threshold to discard potential sources that do not contribute significantly to the acoustic field. The set of indices n of potential sources to discard is found using the following criterion:Sources (unknowns) discarded are set to zero in the final solution and the relative columns of direct operator are removed for the next iterations. The same happens with the weighting matrix .
- Evaluate a convergence criterion; if not fulfilled go back to step 1; otherwise, stop the iterative procedure.
4. Virtual Experiment
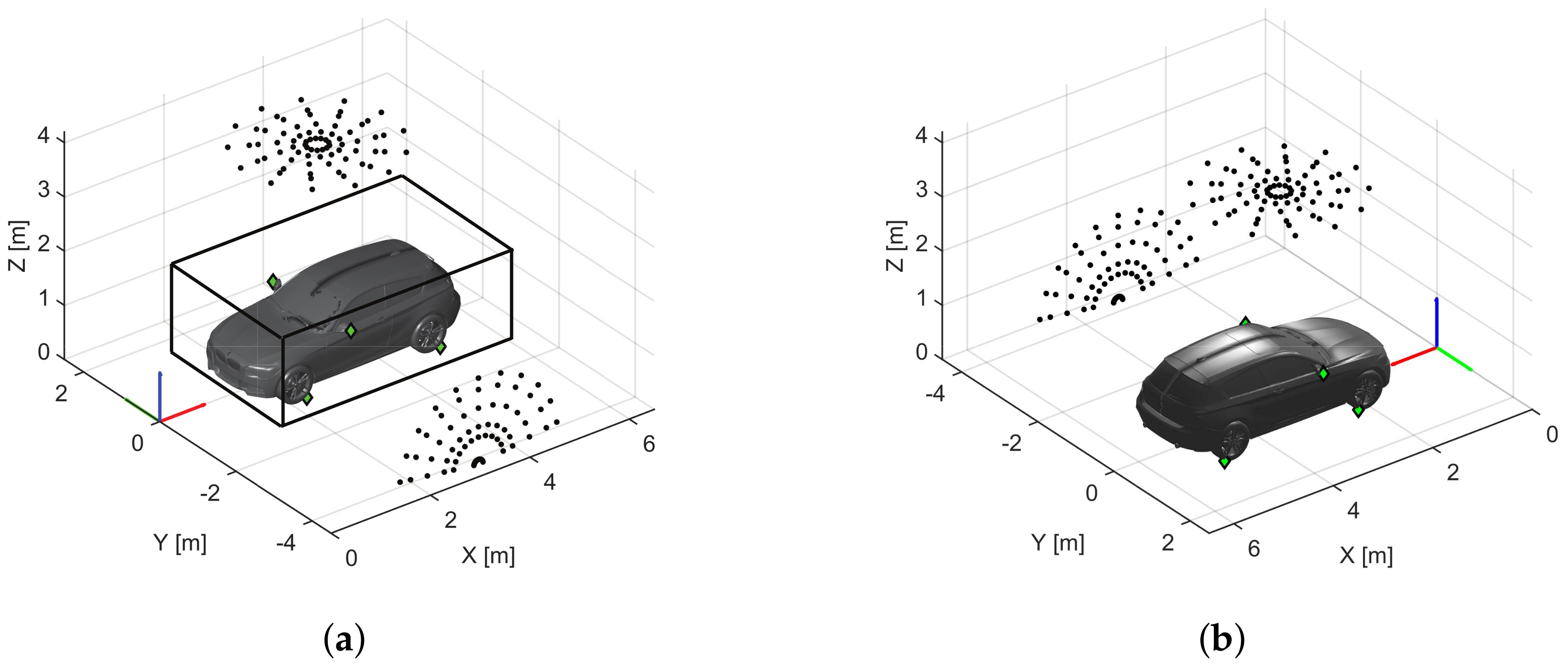
4.1. Setup Description
4.2. Simulation of Microphone Signals
- microphone arrays used in the experiment (only the array on top or both the two arrays),
- considering potential sources in the full volume (i.e., also inside the model) or removing a priori all of them inside the model,
- resolution of the calculation volume point grid,
- accounting for the masking effect due to the car body on the sources not directly “seen” by microphones, and
- different Signal-to-Noise Ratios (SNRs) of measured data.
4.2.1. Source Simulation and Synthesis of Acoustic Pressure at Microphones
4.2.2. Simulation of Source Masking
5. Results of Parametric Study
- Identified sources. A source can be labeled as “identified” if there exists at least one equivalent source with non-null strength in its zone of interest. The set of indices n of equivalent sources to determine if a source is identified can be formalized as
- Number of sources identified (). This simple score is formalized as the cardinality of the set that includes all indices s corresponding to non-empty sets :
- Identified source position (). This indicator is the centroid (weighted with source powers) of the cloud of equivalent sources for each :where is the power associated to each equivalent source in the map.
- Non-dimensional distance error (). This score is defined as the geometric distance between the identified source position and the real one, normalized by the wavelength:
- Power concentration (). This score indicates the sum of the power of identified sources with respect to the total power of map. It is calculated as
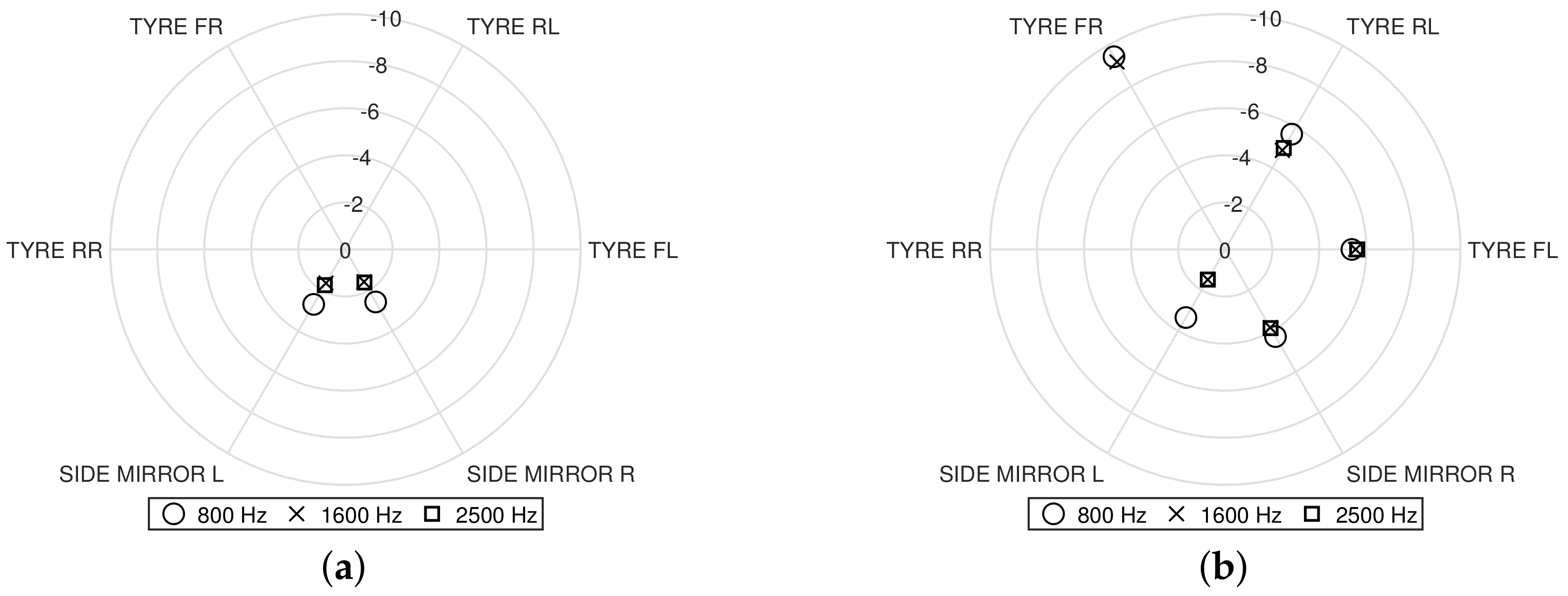
- Source power ratio (). It indicates the ratio of the power associated to each identified source with respect to the real source power.
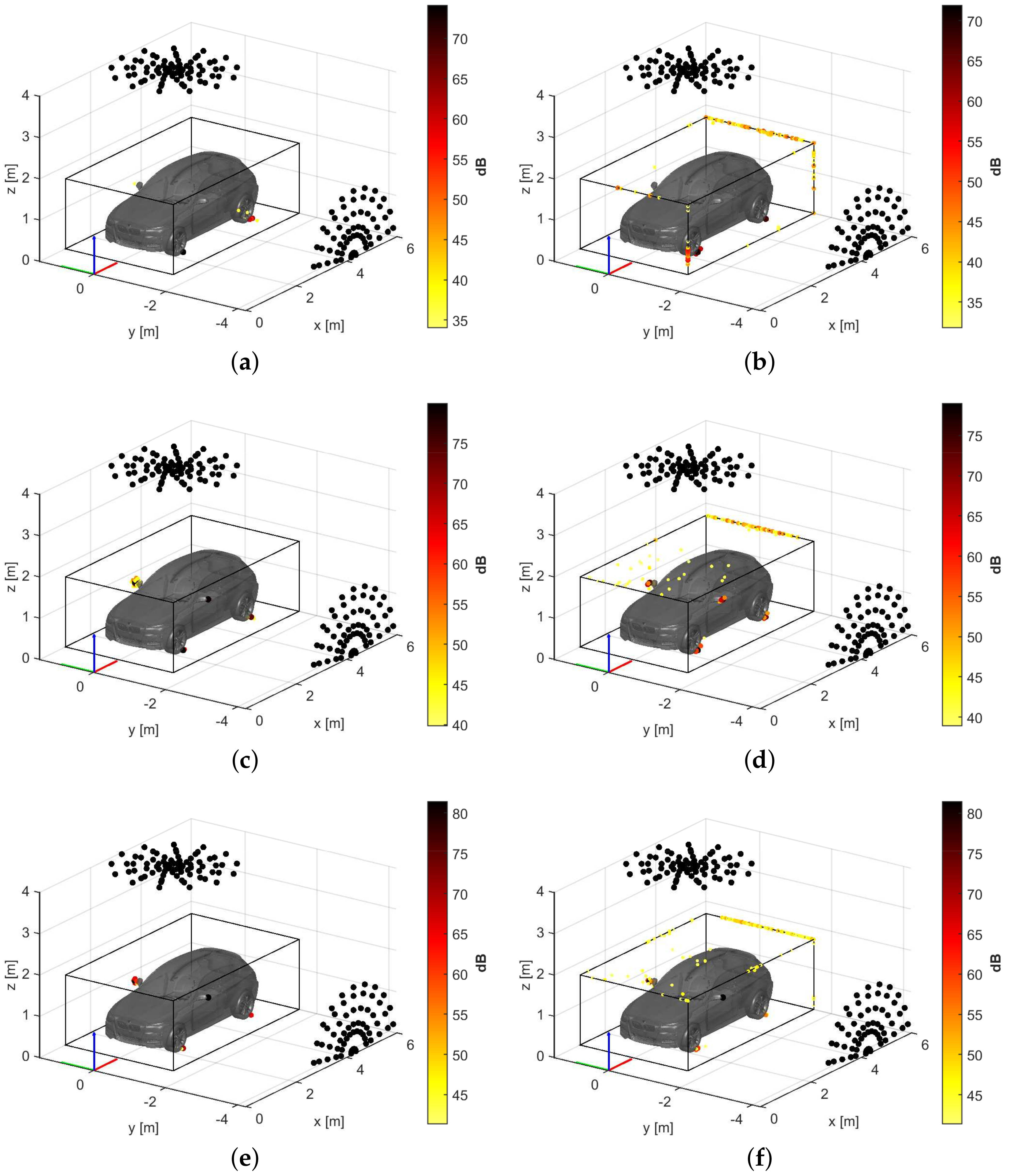
5.1. Single Array versus Multiple Arrays with Different Levels of Masking Effect
5.2. Removal of Potential Sources Inside the Model
5.3. Resolution of Point Grid
5.4. Influence of Background Noise Level
6. Results on Realistic Simulated Test Case
7. Conclusions
- the comparison in the use of a single array or a dual array to produce the map,
- the effect of different levels of masking effect due to the object itself,
- the trimming of the calculation grid removing potential sources inside the model,
- the effect of grid step on the final result, and
- the effect of background noise having well-defined spatial distribution.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Chiariotti, P.; Martarelli, M.; Castellini, P. Acoustic beamforming for noise source localization—Reviews, methodology and applications. Mech. Syst. Signal Process. 2019, 120, 422–448. [Google Scholar] [CrossRef]
- Sijtsma, P. CLEAN based on spatial source coherence. Int. J. Aeroacoustics 2007, 6, 357–374. [Google Scholar] [CrossRef]
- Sarradj, E. Three-Dimensional Acoustic Source Mapping with Different Beamforming Steering Vector Formulations. Adv. Acoust. Vib. 2012, 2012, 1–12. [Google Scholar] [CrossRef]
- Sarradj, E. Three-Dimensional Acoustic Source Mapping. In Proceedings of the CD of the 4th Berlin Beamforming Conference, Berlin, Germany, 22–23 February 2012. [Google Scholar]
- Porteous, R.; Prime, Z.; Doolan, C.; Moreau, D.; Valeau, V. Three-dimensional beamforming of dipolar aeroacoustic sources. J. Sound Vib. 2015, 355, 117–134. [Google Scholar] [CrossRef]
- Lamotte, L.; Minck, O.; Paillasseur, S.; Lanslot, J.; Deblauwe, F. Interior noise source identification with multiple spherical arrays in aircraft and vehicle. In Proceedings of the 20th International Congress on Sound and Vibration, Bangkok, Thailand, 7–11 July 2013; Volume 1, pp. 451–458. [Google Scholar]
- Lamotte, L.; Beguet, B.; Cariou, C.; Delverdier, O. Qualifying the Noise Sources in Term of Localization and Quantification During Flight Tests. In Proceedings of the EUCASS, Versailles, France, 6–9 July 2009. [Google Scholar]
- Elias, G. Source localization with a two-dimensional focused array: Optimal signal processing for a cross-shaped array. Proc. Inter Noise 1995, 95, 1175–1178. [Google Scholar]
- Brooks, T.F.; Humphreys, W.M., Jr. A Deconvolution Approach for the Mapping of Acoustic Sources (DAMAS) Determined from Phased Microphone Arrays. In Proceedings of the 10th AIAA/CEAS Aeroacoustics Conference, Manchester, UK, 10–12 May 2004. [Google Scholar]
- Brooks, T.F.; Humphreys, W.M., Jr. Three-Dimensional Applications of DAMAS Methodology for Aeroacoustic Noise Source Definition. In Proceedings of the 11th AIAA/CEAS Aeroacoustics Conference, Monterey, CA, USA, 23–25 May 2005. [Google Scholar]
- Padois, T.; Robin, O.; Berry, A. 3D Source localization in a closed wind-tunnel using microphone arrays. In Proceedings of the 19th AIAA/CEAS Aeroacoustics Conference, American Institute of Aeronautics and Astronautics (AIAA), Berlin, Germany, 27–29 May 2013. [Google Scholar] [CrossRef]
- Padois, T.; Berry, A. Two and Three-Dimensional Sound Source Localization with Beamforming and Several Deconvolution Techniques. Acta Acust. United Acust. 2017, 103, 392–400. [Google Scholar] [CrossRef]
- Ning, F.; Wei, J.; Qiu, L.; Shi, H.; Li, X. Three-dimensional acoustic imaging with planar microphone arrays and compressive sensing. J. Sound Vib. 2016, 380, 112–128. [Google Scholar] [CrossRef]
- Battista, G.; Chiariotti, P.; Herold, G.; Sarradj, E.; Castellini, P. Inverse methods for three-dimensional acoustic mapping with a single planar array. In Proceedings of the 7th Berlin Beamforming Conference, Berlin, Germany, 5–6 March 2018. [Google Scholar]
- Yardibi, T.; Li, J.; Stoica, P.; Cattafesta, L.N. Sparsity constrained deconvolution approaches for acoustic source mapping. J. Acoust. Soc. Am. 2008, 123, 2631–2642. [Google Scholar] [CrossRef] [PubMed]
- Pereira, A. Acoustic Imaging in Enclosed Spaces. Ph.D. Thesis, INSA de Lyon, Villeurbanne, France, 2014. [Google Scholar]
- Suzuki, T. L1 generalized inverse beam-forming algorithm resolving coherent/incoherent, distributed and multipole sources. J. Sound Vib. 2011, 330, 5835–5851. [Google Scholar] [CrossRef]
- Battista, G.; Chiariotti, P.; Martarelli, M.; Castellini, P. Inverse methods in aeroacoustic three-dimensional volumetric noise source localization. In Proceedings of the ISMA-USD 2018, Leuven, Belgium, 17–19 September 2018. [Google Scholar]
- Hadamard, J. Sur les problèmes aux dérivés partielles et leur signification physique, (On the partial derivative problems and their physical meaning). Princet. Univ. Bull. 1902, 13, 49–52. [Google Scholar]
- Leclère, Q.; Pereira, A.; Bailly, C.; Antoni, J.; Picard, C. A unified formalism for acoustic imaging techniques: Illustrations in the frame of a didactic numerical benchmark. In Proceedings of the 6th Berlin Beamforming Conference, Berlin, Germany, 29 February–1 March 2016. [Google Scholar]
- Leclère, Q.; Pereira, A.; Bailly, C.; Antoni, J.; Picard, C. A unified formalism for acoustic imaging based on microphone array measurements. Int. J. Aeroacoustics 2017, 16, 431–456. [Google Scholar] [CrossRef]
- Tikhonov, A.N. Solution of incorrectly formulated problems and the regularization method. Sov. Math. Dokl. 1963, 4, 1035–1038. [Google Scholar]
- Antoni, J. A Bayesian approach to sound source reconstruction: Optimal basis, regularization, and focusing. J. Acoust. Soc. Am. 2012, 131, 2873–2890. [Google Scholar] [CrossRef] [PubMed]
- Pereira, A.; Antoni, J.; Leclère, Q. Empirical Bayesian regularization of the inverse acoustic problem. Appl. Acoust. 2015, 97, 11–29. [Google Scholar] [CrossRef]
- Chartrand, R.; Yin, W. Iteratively reweighted algorithms for compressive sensing. In Proceedings of the 2008 IEEE International Conference on Acoustics, Speech and Signal Processing, Las Vegas, NV, USA, 31 March–4 April 2008. [Google Scholar] [CrossRef]
- Antoni, J.; Magueresse, T.L.; Leclère, Q.; Simard, P. Sparse acoustical holography from iterated Bayesian focusing. J. Sound Vib. 2019, 446, 289–325. [Google Scholar] [CrossRef]
- Champagnat, F.; Idier, J. A Connection Between Half-Quadratic Criteria and EM Algorithms. IEEE Signal Process. Lett. 2004, 11, 709–712. [Google Scholar] [CrossRef]
- Padois, T.; Gauthier, P.A.; Berry, A. Inverse problem with beamforming regularization matrix applied to sound source localization in closed wind-tunnel using microphone array. J. Sound Vib. 2014, 333, 6858–6868. [Google Scholar] [CrossRef]
- Colangeli, C.; Chiariotti, P.; Battista, G.; Castellini, P.; Janssens, K. Clustering inverse beamforming for interior sound source localization: Application to a car cabin mock-up. In Proceedings of the 6th Berlin Beamforming Conference, Berlin, Germany, 29 February–1 March 2016. [Google Scholar]
- Amiet, R.K. Correction of Open Jet Wind Tunnel Measurements for Shear Layer Refraction. AIAA J. 1975, 259–280. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 6 dB | 10 dB | 20 dB | |
|---|---|---|---|
| 800 | 6 | 5 | 3 |
| 1600 | 6 | 6 | 5 |
| 2500 | 6 | 6 | 5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Battista, G.; Chiariotti, P.; Martarelli, M.; Castellini, P.; Colangeli, C.; Janssens, K. 3D Acoustic Mapping in Automotive Wind Tunnel: Algorithm and Problem Analysis on Simulated Data. Appl. Sci. 2021, 11, 3241. https://doi.org/10.3390/app11073241
Battista G, Chiariotti P, Martarelli M, Castellini P, Colangeli C, Janssens K. 3D Acoustic Mapping in Automotive Wind Tunnel: Algorithm and Problem Analysis on Simulated Data. Applied Sciences. 2021; 11(7):3241. https://doi.org/10.3390/app11073241
Chicago/Turabian StyleBattista, Gianmarco, Paolo Chiariotti, Milena Martarelli, Paolo Castellini, Claudio Colangeli, and Karl Janssens. 2021. "3D Acoustic Mapping in Automotive Wind Tunnel: Algorithm and Problem Analysis on Simulated Data" Applied Sciences 11, no. 7: 3241. https://doi.org/10.3390/app11073241
APA StyleBattista, G., Chiariotti, P., Martarelli, M., Castellini, P., Colangeli, C., & Janssens, K. (2021). 3D Acoustic Mapping in Automotive Wind Tunnel: Algorithm and Problem Analysis on Simulated Data. Applied Sciences, 11(7), 3241. https://doi.org/10.3390/app11073241