
Improved PR Control Strategy for an LCL Three-Phase Grid-Connected Inverter Based on Active Damping




Abstract
Featured Application
Abstract
1. Introduction
2. Mathematical Model and Control Method
2.1. Mathematical Model of the Three-Phase LCL-Type Grid-Connected Inverter
2.2. Mathematical Model of the α-β Coordinate System
2.3. Instantaneous Power Calculation
3. Analysis of the Control Strategy
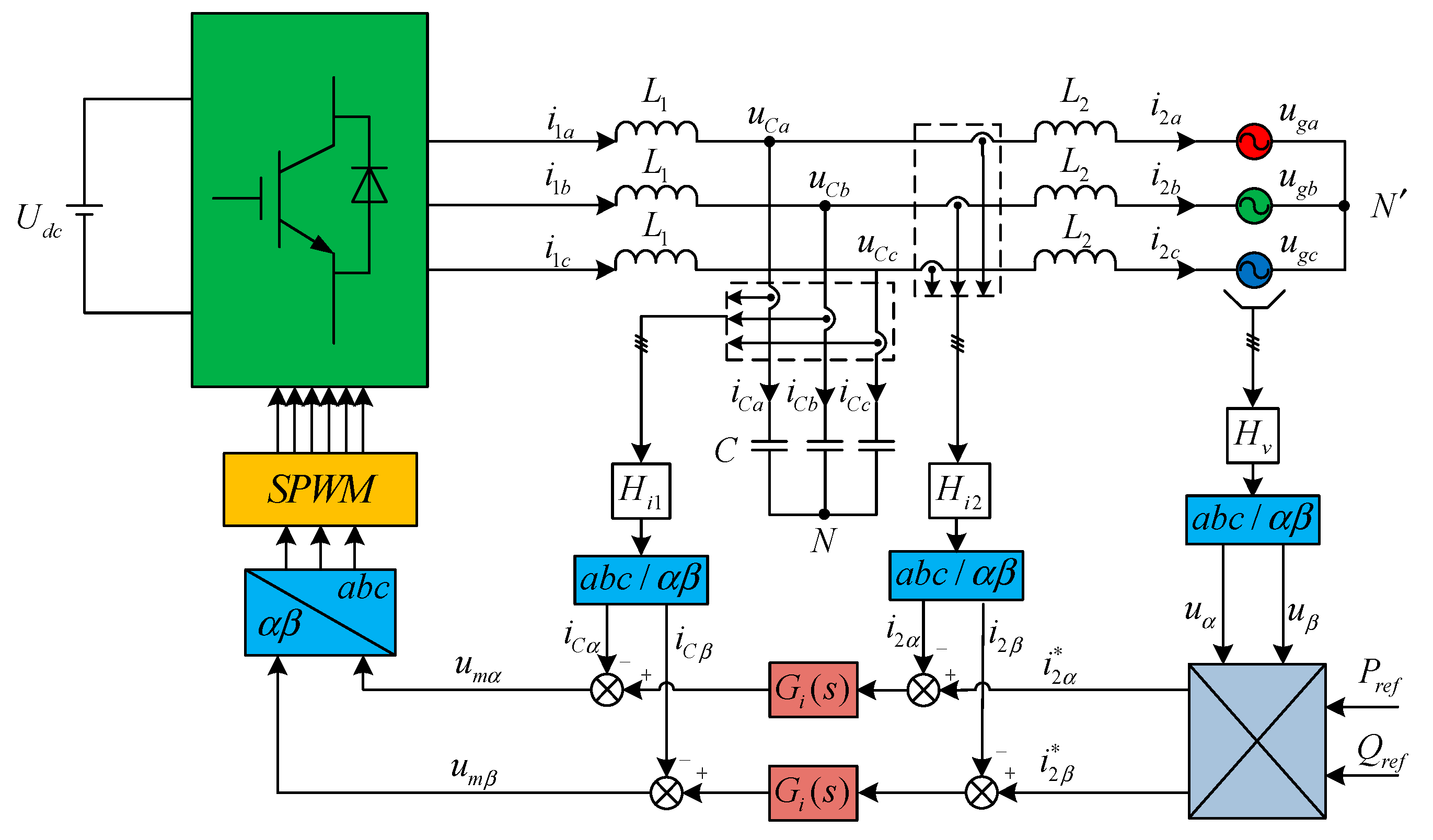
3.1. LCL-Type Three-Phase Grid-Connected Inverter Control Structure
3.2. Capacitor Current Feedback Active Damping
3.3. Performance Comparison of the PR and QPR Controller
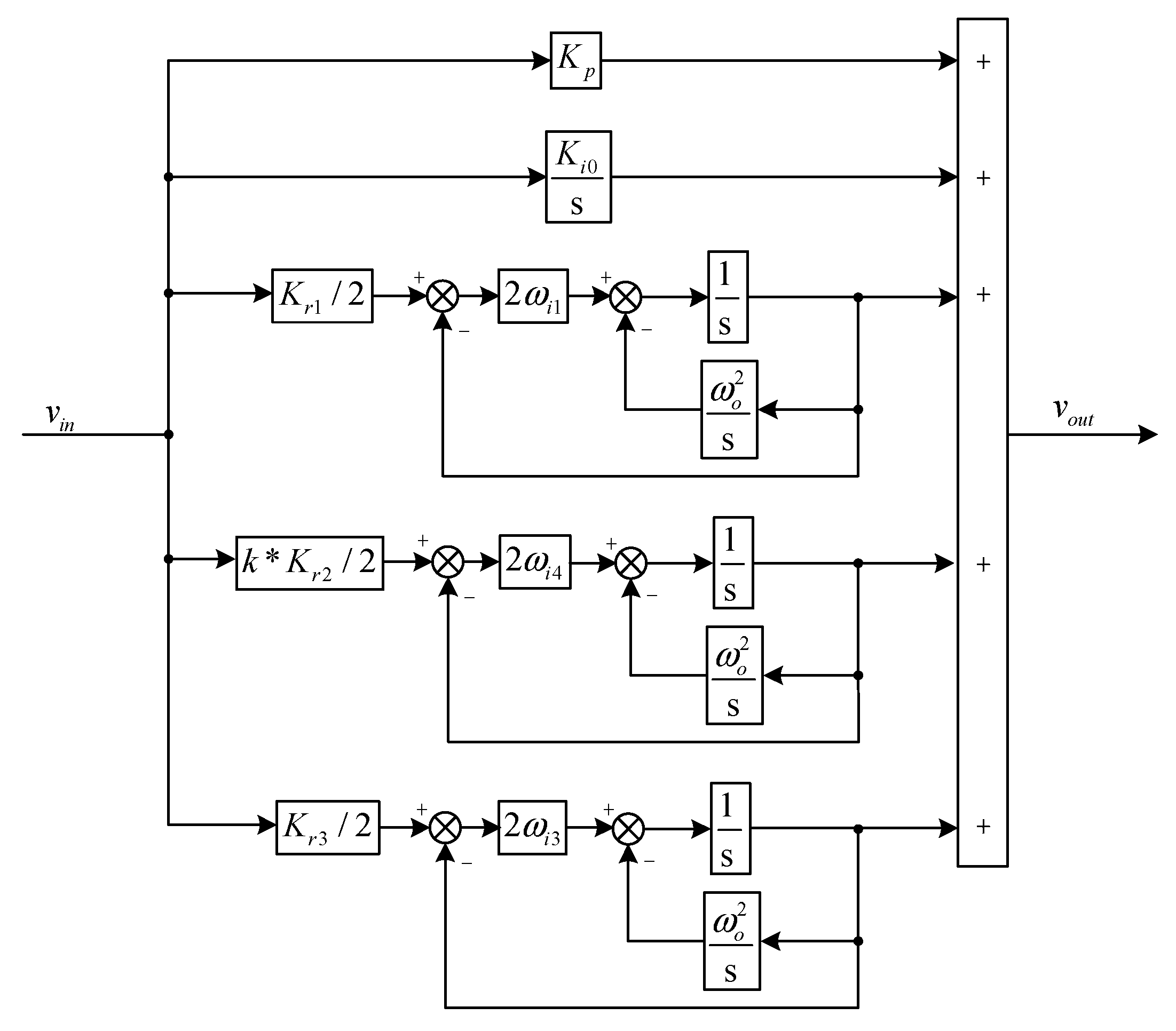
3.4. Improved Controller QPIR
3.5. Implementation of the QPIR Controller
4. Case Analysis
4.1. Analysis of Voltage and Current Based on the Improved QPIR Controller
4.2. Step Response Analysis Based on the Improved QPIR Controller
4.3. Frequency Fluctuation Analysis Based on the Improved QPIR Controller
5. Conclusions
- The LCL grid-connected inverter based on active damping can realize independent control of active power and reactive power without coupling between the α axis and β axis in a two-phase static coordinate system.
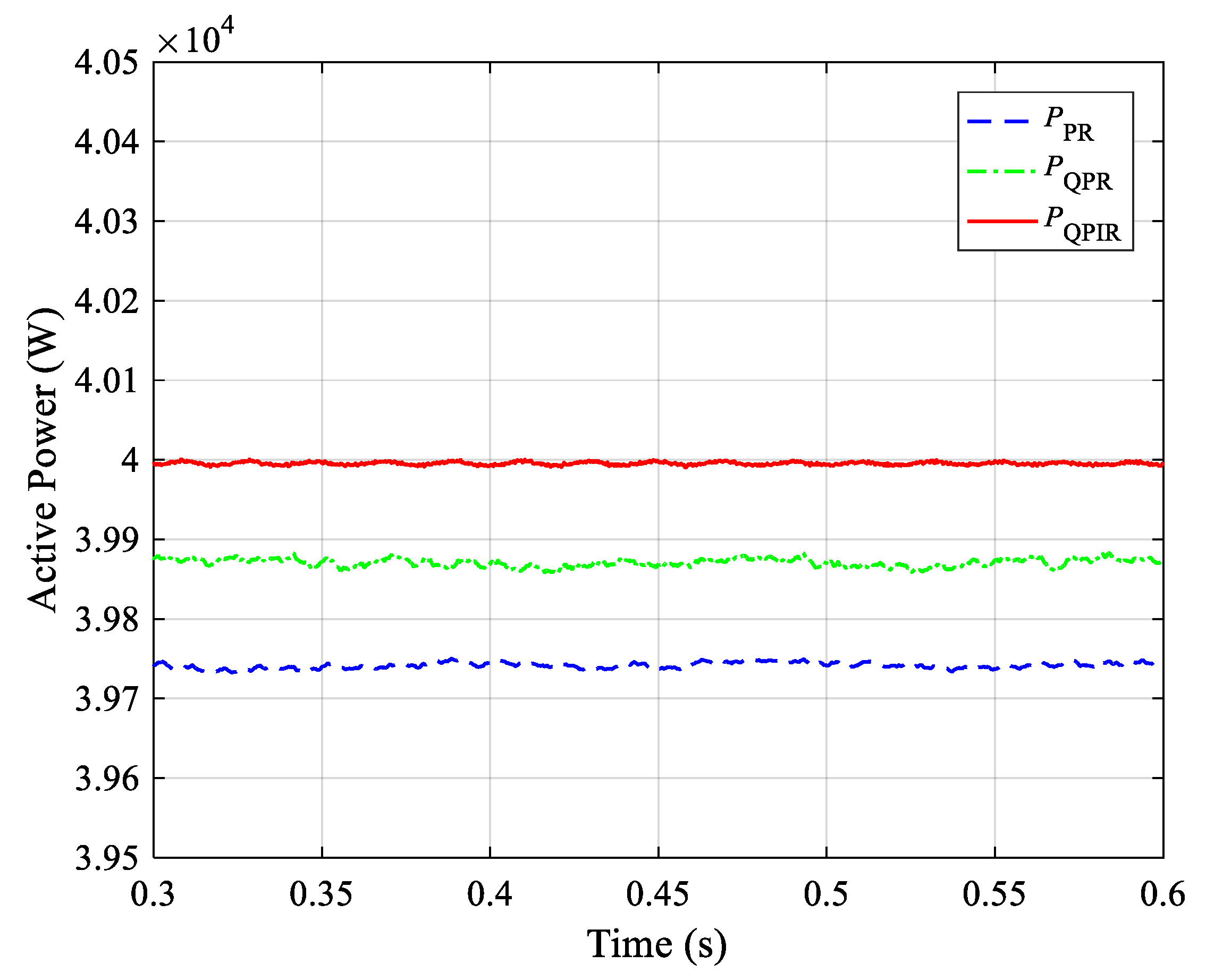
- Compared with the traditional PR and QPR controllers, the improved QPIR controller has higher grid-connected current control accuracy under the condition of stable and fluctuating grid frequency.
- The improved QPIR controller can realize the fast follow-up of active power and reactive power by the inverter, and when the active power jumps, the reactive power is not affected. When the reactive power jumps, the active power is not affected.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| PWM | pulse width modulation |
| PI | proportional integral |
| PR | proportional resonant |
| QPR | quasi proportional resonant |
| QPIR | quasi proportional integral resonant |
| k = a, b, c | three-phase |
| uk | midpoint voltage of bridge arm |
| i1k | inductor current on inverter side |
| i2k | grid side current |
| iCk | filter capacitance current |
| uCk | filter capacitance voltage |
| Udc | DC-bus voltage |
| ugk | grid voltage |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Quantity | Parameter |
|---|---|---|
| Udc | DC bus voltage | 750 V |
| ug | Power grid line voltage (RMS) | 380 V |
| L1 | Inverter side inductance | 700 μH |
| L2 | Network side inductance | 110 μH |
| C | Filter capacitor | 15 μF |
| Vtri | Amplitude of triangle carrier wave | 4.58 V |
| Kpwm | Transfer function of modulated wave to inverter bridge | 81.87 |
| Hi1 | Capacitance current feedback coefficient | 0.001, 0.1, 0.2 |
| Hi2 | Power network current feedback coefficient | 0.20 |
| Hv | Power network voltage feedback coefficient | 1.00 |
References
- Hassaine, L.; OLias, E.; Quintero, J.; Salas, V. Overview of power inverter topologies and control structures for grid connected photovoltaic systems. Renew. Sustain. Energy Rev. 2014, 30, 796–807. [Google Scholar] [CrossRef]
- Blaabjerg, F.; Teodorescu, R.; Liserre, M.; Timbus, A.V. Overview of Control and Grid Synchronization for Distributed Power Generation Systems. IEEE Trans. Ind. Electron. 2006, 53, 1398–1409. [Google Scholar] [CrossRef]
- Gomes, C.C.; Cupertino, A.F.; Pereir, H.A. Damping techniques for grid-connected voltage source converters based on LCL filter: An overview. Renew. Sustain. Energy Rev. 2018, 81, 116–135. [Google Scholar] [CrossRef]
- Nardi, C.; Stein, C.M.O.; Carati, E.G.; Costa, J.P.; Cardoso, R. A methodology of LCL filter design for grid-tied power converters. IEEE Trans. Ind. Electron. 2006, 53, 1398–1409. [Google Scholar]
- Zhang, J.; Xiong, G.; Meng, K.; Yu, P.; Yao, G.; Dong, Z. An improved probabilistic load flow simulation method considering correlated stochastic variables. Int. J. Electr. Power Energy Syst. 2019, 111, 260–268. [Google Scholar] [CrossRef]
- Zhang, J.; Fan, L.; Zhang, Y. A Probabilistic Assessment Method for Voltage Stability Considering Large Scale Correlated Stochastic Variables. IEEE Access 2020, 8, 5407–5415. [Google Scholar] [CrossRef]
- Sahoo, A.K.; Shahani, A.; Basu, K.; Mohan, N. LCL filter design for grid-connected inverters by analytical estimation of PWM ripple voltage. In Proceedings of the IEEE Applied Power Electronics Conference and Exposition, Fort Worth, TX, USA, 16–20 March 2014; pp. 1281–1286. [Google Scholar]
- Zhang, H.; Ruan, X.; Lin, Z.; Wu, L.; Ding, Y.; Guo, Y. Capacitor Voltage Full Feedback Scheme for LCL-Type Grid-Connected Inverter to Suppress Current Distortion Due to Grid Voltage Harmonics. IEEE Trans. Power Electron. 2021, 36, 2996–3006. [Google Scholar] [CrossRef]
- Elsaharty, M.A.; Ashour, H.A. Passive L and LCL filter design method for grid-connected inverters. In Proceedings of the IEEE Conference in Innovative Smart Grid Technologies, Kuala Lumpur, Malaysia, 20–23 May 2014; pp. 13–18. [Google Scholar]
- Li, N.; Wang, Y.; Niu, R.; Guo, W.; Lei, W.; Wang, Z. A novel LCL filter parameter design method basing on resonant frequency optimization method of three-level NPC grid connected inverter. In Proceedings of the IEEE Conference on Power Electronics, Hiroshima, Japan, 18–21 May 2014; pp. 160–165. [Google Scholar]
- Reznik, A.; Simões, M.G.; Durra, A.A.; Muyeen, S.M. LCL filter design and performance analysis for grid interconnected systems. IEEE Trans. Ind. Appl. 2014, 50, 1225–1232. [Google Scholar] [CrossRef]
- Alzola, R.P.; Liserre, M.; Blaabjerg, F.; Sebastián, R.; Dannehl, J.; Fuchs, F.W. Analysis of the passive damping losses in LCL-filter-based grid converters. IEEE Trans. Power Electron. 2013, 28, 2642–2646. [Google Scholar] [CrossRef]
- Ahn, H.M.; Oh, C.Y.; Sung, W.Y.; Ahn, J.H.; Lee, B.K. Analysis and Design of LCL Filter with Passive Damping Circuits for Three-phase Grid-connected Inverters. In Proceedings of the IEEE 2015 9th International Conference on Power Electronics and ECCE Asia (ICPE-ECCE Asia), Seoul, Korea, 1–5 June 2015; pp. 1–5. [Google Scholar]
- Pan, D.; Ruan, X.; Bao, C.; Li, W.; Wang, X. Capacitor-current feedback active damping with reduced computation delay for improving robustness of LCL-type grid-connected inverter. IEEE Trans. Power Electron. 2014, 29, 3414–3427. [Google Scholar] [CrossRef]
- Jia, Y.; Zhao, J.; Fu, X. Direct Grid Current Control of LCL-Filtered Grid-Connected Inverter Mitigating Grid Voltage Disturbance. IEEE Trans. Power Electron. 2014, 29, 1532–1541. [Google Scholar]
- Zou, Z.; Wang, Z.; Cheng, M. Modeling, Analysis, and Design of Multifunction Grid-Interfaced Inverters with Output LCL Filter. IEEE Trans. Power Electron. 2014, 29, 3830–3839. [Google Scholar] [CrossRef]
- Dannehl, J.; Fuchs, F.W.; Hansen, S.; Paul, B.T. Investigation of active damping approaches for PI-based current control of gridconnected pulse width modulation converters with LCL filters. IEEE Trans. Ind. Appl. 2010, 46, 1509–1517. [Google Scholar] [CrossRef]
- Xu, J.; Xie, S.; Tang, T. Active damping-based control for grid connected LCL-filtered inverter with injected grid current only. IEEE Trans. Ind. Electron. 2014, 61, 4746–4758. [Google Scholar] [CrossRef]
- Hanif, M.; Khadkikar, V.; Xiao, W.; Kirtley, J.L. Two Degrees of Freedom Active Damping Technique for LCL Filter-Based Grid Connected PV Systems. IEEE Trans. Ind. Electron. 2014, 61, 2795–2830. [Google Scholar] [CrossRef]
- Dannehl, J.; Fuchs, F.W.; Thøgersen, P.B. PI State Space Current Control of Grid-Connected PWM Converters With LCL Filters. IEEE Trans. Power Electron. 2010, 25, 2320–2330. [Google Scholar] [CrossRef]
- Busada, C.A.; Jorge, S.G.; Solsona, J.A. Full-state feedback equivalent controller for active damping in LCL filtered grid connected inverters using a reduced number of sensors. IEEE Trans. Ind. Electron. 2015, 62, 5993–6002. [Google Scholar] [CrossRef]
- Nishida, K.; Abded, T.; Nakaoka, M. A Novel Finite-Time Settling Control Algorithm Designed for Grid-Connected Three-Phase Inverter With an LCL-Type Filter. IEEE Trans. Ind. Appl. 2014, 50, 2005–2020. [Google Scholar] [CrossRef]
- Yu, Y.; Li, H.; Li, Z.; Zhao, Z. Modeling and Analysis of Resonance in LCL-Type Grid-Connected Inverters under Different Control Schemes. Energies 2017, 10, 104. [Google Scholar] [CrossRef]
- Dang, C.; Tong, X.; Song, W. Sliding-mode control in dq-frame for a three-phase grid-connected inverter with LCL-filter. ELSEVIER 2020, 357, 10159–10174. [Google Scholar] [CrossRef]
- Zhang, H.; Xian, J.; Shi, J.; Wu, S.; Ma, Z. High Performance Decoupling Current Control by Linear Extended State Observer for Three-Phase Grid-Connected Inverter With an LCL Filter. IEEE Access 2020, 8, 13119–13127. [Google Scholar] [CrossRef]
- Firuzi, M.F.; Roosta, A.; Gitizadeh, M. Stability analysis and decentralized control of inverter-based ac microgrid. Protection and Control of Modern Power Systems. 2019, 4, 65–86. [Google Scholar]
- Badal, F.R.; Das, P.; Sarker, S.K.; Das, S.K. A survey on control issues in renewable energy integration and microgrid. Protection and Control of Modern Power Systems. 2019, 4, 87–113. [Google Scholar] [CrossRef]
- Liserre, M.; Sauter, T.; Hung, J.Y. Future energy systems: Integrating renewable energy sources into the smart power grid through industrial electronics. IEEE Trans. Ind. Electron. 2010, 4, 18–37. [Google Scholar] [CrossRef]
- Annamraju, A.; Nandiraju, S. Coordinated control of conventional power sources and PHEVs using jaya algorithm optimized PID controller for frequency control of a renewable penetrated power system. Prot. Control Mod. Power Syst. 2019, 4, 343–355. [Google Scholar] [CrossRef]
- Tian, P.; Li, Z.; Hao, Z. Doubly-Fed Induction Generator Coordination Control Strategy Compatible with Feeder Automation. Electronics 2020, 9, 18. [Google Scholar] [CrossRef]
- Komurcugil, H.; Altin, N.; Ozdemir, S.; Sefa, I. Lyapunov-function and proportional resonant based control strategy for single-phase grid-connected VSI with LCL filter. IEEE Trans. Ind. Electron. 2016, 63, 2838–2849. [Google Scholar] [CrossRef]
- Alemi, P.; Jeong, S.; Jeong, S.Y.; Lee, D.C. Active Damping of LLCL Filters Using PR Control for Grid-Connected Three-Level T-Type Converters. Korean Institude Power Electron. 2015, 15, 786–795. [Google Scholar] [CrossRef]
- Tian, P.; Li, Z.; Hao, Z. A Doubly-Fed Induction Generator Adaptive Control Strategy and Coordination Technology Compatible with Feeder Automation. Energies 2019, 12, 4463. [Google Scholar] [CrossRef]
- Gong, Z.; Zheng, X.; Zhang, H.; Wu, X.; Li, M. A QPR-Based Low-Complexity Input Current Control Strategy for the Indirect Matrix Converters with Unity Grid Power Factor. IEEE Trans. Access. 2019, 99, 38766–38777. [Google Scholar] [CrossRef]
- Tian, P.; Li, Z.; Hao, Z. Improved Controller of LCL-Type Grid-connected Inverter System based on Active-Damping. In Proceedings of the 2018 10th International Conference on Modelling, Identification and Control (ICMIC), Guiyang, China, 2–4 July 2018; pp. 1–6. [Google Scholar]
- Craciun, B.I.; Kerekes, T.; Sera, D.; Teodorescu, R. Overview of recent grid codes for PV power integration. In Proceedings of the IEEE International Conference on Optimization of Electrical and Electronic Equipment, Brasov, Romania, 24–26 May 2012; pp. 959–965. [Google Scholar]
- Bao, C.; Ruan, X.; Wang, X.; Li, W.; Pan, D.; Weng, K. Step-by-Step Controller Design for LCL-Type Grid-Connected Inverter with Capacitor Current-Feedback Active-Damping. IEEE Trans. Power Electron. 2014, 29, 1239–1253. [Google Scholar]



















| Project | Parameter |
|---|---|
| DC bus voltage Udc | 750 V |
| Power grid line voltage ug (RMS) | 380 V, |
| Rated power PN | 40 kW |
| Inverter side inductance L1 | 700 μH |
| Network side inductance L2 | 110 μH |
| Filter capacitor C | 15 μF |
| Fundamental frequency f0 | 50 Hz |
| Switching frequency fs | 15 kHz |
| Capacitance current feedback coefficient Hi1 | 0.12 |
| Power network current feedback coefficient Hi2 | 0.14 |
| Power network voltage feedback coefficient Hv | 1.00 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Zhang, J.; Hao, Z.; Tian, P. Improved PR Control Strategy for an LCL Three-Phase Grid-Connected Inverter Based on Active Damping. Appl. Sci. 2021, 11, 3170. https://doi.org/10.3390/app11073170
Li Y, Zhang J, Hao Z, Tian P. Improved PR Control Strategy for an LCL Three-Phase Grid-Connected Inverter Based on Active Damping. Applied Sciences. 2021; 11(7):3170. https://doi.org/10.3390/app11073170
Chicago/Turabian StyleLi, Yahui, Jing Zhang, Zhenghang Hao, and Peng Tian. 2021. "Improved PR Control Strategy for an LCL Three-Phase Grid-Connected Inverter Based on Active Damping" Applied Sciences 11, no. 7: 3170. https://doi.org/10.3390/app11073170
APA StyleLi, Y., Zhang, J., Hao, Z., & Tian, P. (2021). Improved PR Control Strategy for an LCL Three-Phase Grid-Connected Inverter Based on Active Damping. Applied Sciences, 11(7), 3170. https://doi.org/10.3390/app11073170