
Geometric Reduced-Attitude Control of Fixed-Wing UAVs



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Featured Application
Abstract
1. Introduction
1.1. Background and Motivation
1.2. Scope and Contributions
1.3. Related Work
1.4. Organization of the Paper
2. Preliminaries
2.1. Notation and Definitions
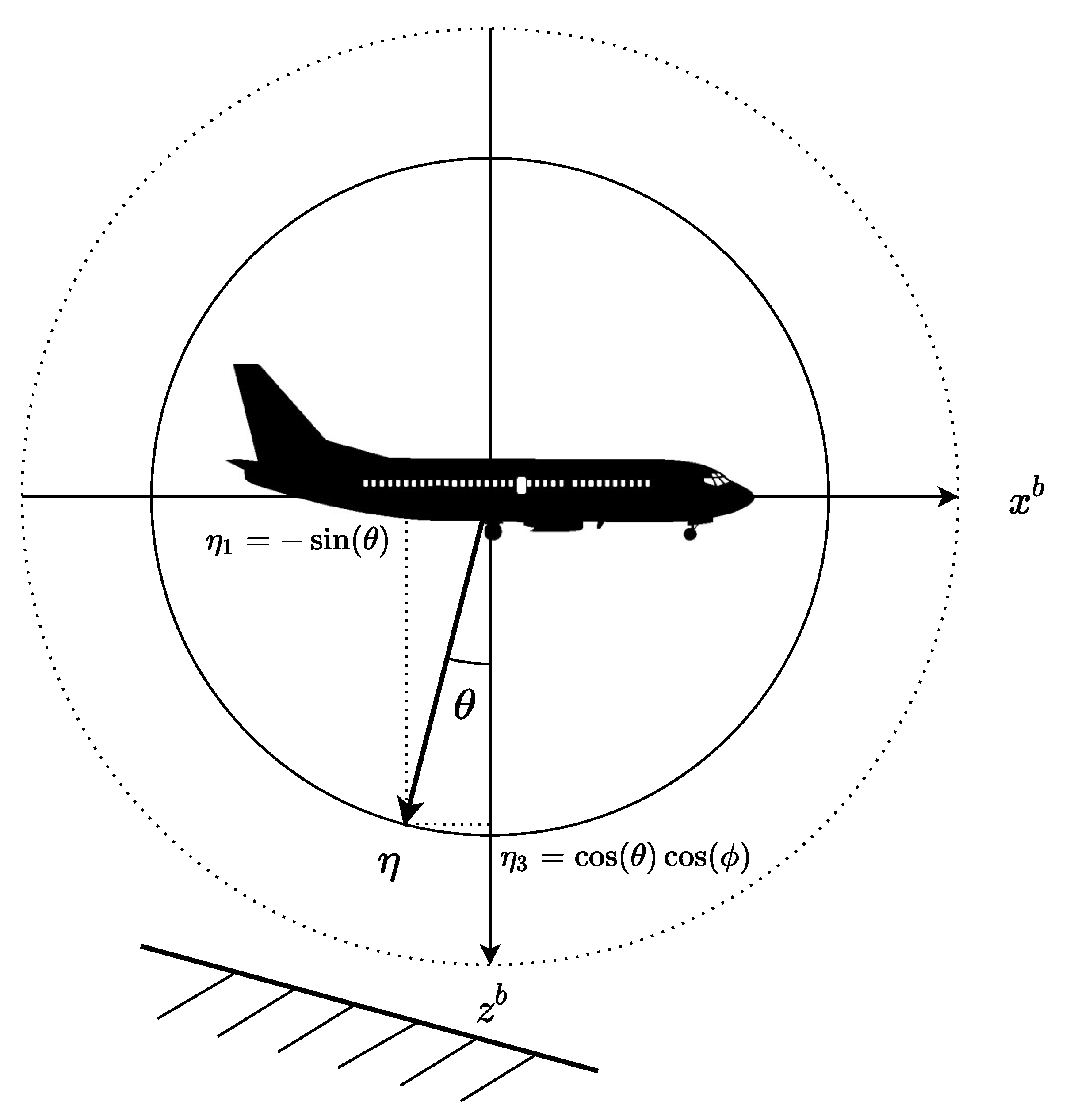
2.2. Reduced-Attitude Representation
3. UAV Rotational Dynamics
3.1. Aerodynamics
3.2. Propulsion Effects
3.3. Control-Oriented Model
4. Almost Global Reduced-Attitude Tracking Control for Fixed-Wing UAVs
4.1. Error Functions
4.2. Control Objective
4.3. Coordinated-Turn Equation
- An alternative to (24) is to define in terms of and then project to :The extra term puts less emphasis on turn coordination when errors in reduced attitude are large.
- Equation (24) only satisfies the coordinated-turn Equation (20) asymptotically, as (and ). One might consider to instead use the actual value of instead of , but in the case, we cannot guarantee a priori that and its derivative are bounded. This means that the subsequent stability analysis needs to be adjusted. A pragmatic solution could be to use a saturation function in combination with (24).
5. Control Laws—Nominal Case
5.1. Control Design Based on an Energy-Like Lyapunov Function
- (i)
- There are two closed-loop equilibria, given by .
- (ii)
- The equilibrium is unstable.
- (iii)
- The desired equilibrium is almost globally asymptotically stable.
- (iv)
- The desired equilibrium is locally exponentially stable. In addition, if the initial conditions satisfythen the energy-like function converges exponentially to zero.
- (v)
- and as .
5.2. Backstepping Design
- (i)
- There are two closed-loop equilibria, given by .
- (ii)
- The equilibrium is unstable.
- (iii)
- The desired equilibrium is almost globally asymptotically stable.
- (iv)
- The desired equilibrium is locally exponentially stable. In addition, if the initial conditions satisfythen the energy function converges exponentially to zero.
- (v)
- and as .
6. Robustness Considerations
6.1. Integral Action
- i
- There are two closed-loop equilibria, given by .
- ii
- The equilibrium is unstable.
- iii
- The desired equilibrium is almost globally asymptotically stable and locally exponentially stable.
6.2. Uncertain Model
7. Simulation Results
7.1. Matlab
7.2. Software-in-the-Loop Simulation
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Time Derivative of Desired Velocities
Appendix B. Proof of Proposition 1
Appendix B.1. Equilibrium Solutions
Appendix B.2. Instability of the Undesired Equilibrium Point
Appendix B.3. Stability of the Desired Equilibrium
Appendix B.4. Exponential Stability
Appendix B.5. Convergence of Angular Velocities
Appendix C. Proof of Proposition 2
Appendix D. Proof of Proposition 3
Appendix E. Proof of Proposition 4
References
- Beard, R.W.; McLain, T.W. Small Unmanned Aircraft; Princeton University Press: Princeton, NJ, USA, 2012. [Google Scholar]
- Valavanis, K.P.; Vachtsevanos, G.J. (Eds.) Handbook of Unmanned Aerial Vehicles; Springer: Dordrecht, The Netherlands, 2015. [Google Scholar] [CrossRef]
- Michailidis, M.G.; Rutherford, M.J.; Valavanis, K.P. A Survey of Controller Designs for New Generation UAVs: The Challenge of Uncertain Aerodynamic Parameters. Int. J. Control Autom. Syst. 2020, 18, 801–816. [Google Scholar] [CrossRef]
- Breivik, M.; Fossen, T.I. Principles of Guidance-Based Path Following in 2D and 3D. In Proceedings of the 44th IEEE Conference on Decision and Control, Seville, Spain, 12–15 December 2005; pp. 627–634. [Google Scholar] [CrossRef]
- Johansen, T.A.; Fossen, T.I. Guidance, Navigation, and Control of Fixed-Wing Unmanned Aerial Vehicles. In Encyclopedia of Robotics; Ang, M.H., Khatib, O., Siciliano, B., Eds.; Springer: Berlin/Heidelberg, Germany, 2020; pp. 1–9. [Google Scholar] [CrossRef]
- Samson, C. Path Following and Time-Varying Feedback Stabilization of a Wheeled Mobile Robot. In Proceedings of the 2nd International Conference on Advanced Robotics and Computer Vision (ICARCV), Singapore, 16–18 September 1992. [Google Scholar]
- Aguiar, A.P.; Hespanha, J.P. Trajectory-Tracking and Path-Following of Underactuated Autonomous Vehicles with Parametric Modeling Uncertainty. IEEE Trans. Autom. Control 2007, 52, 1362–1379. [Google Scholar] [CrossRef]
- Aguiar, A.P.; Hespanha, J.P.; Kokotovic, P.V. Path-following for nonminimum phase systems removes performance limitations. IEEE Trans. Autom. Control 2005, 50, 234–239. [Google Scholar] [CrossRef]
- Sujit, P.B.; Saripalli, S.; Sousa, J.B. Unmanned Aerial Vehicle Path Following: A Survey and Analysis of Algorithms for Fixed-Wing Unmanned Aerial Vehicless. IEEE Control Syst. Mag. 2014, 34, 42–59. [Google Scholar] [CrossRef]
- Pelizer, G.V.; da Silva, N.B.F.; Branco, K.R.L.J. Comparison of 3D path-following algorithms for unmanned aerial vehicles. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 498–505. [Google Scholar] [CrossRef]
- Rubí, B.; Pérez, R.; Morcego, B. A Survey of Path Following Control Strategies for UAVs Focused on Quadrotors. J. Intell. Robot Syst. 2020, 98, 241–265. [Google Scholar] [CrossRef]
- Santoso, F.; Garratt, M.A.; Anavatti, S.G. State-of-the-Art Integrated Guidance and Control Systems in Unmanned Vehicles: A Review. IEEE Syst. J. 2020, 1–12. [Google Scholar] [CrossRef]
- Chai, R.; Tsourdos, A.; Savvaris, A.; Chai, S.; Xia, Y.; Philip, C. Review of advanced guidance and control algorithms for space/aerospace vehicles. Prog. Aerosp. Sci. 2021, 122, 100696. [Google Scholar] [CrossRef]
- Park, S.; Deyst, J.; How, J.P. A New Nonlinear Guidance Logic for Trajectory Tracking. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Providence, RI, USA, 16–19 August 2004. [Google Scholar] [CrossRef]
- Park, S.; Deyst, J.; How, J.P. Performance and Lyapunov Stability of a Nonlinear Path Following Guidance Method. J. Guid. Control Dyn. 2012, 30, 1718–1728. [Google Scholar] [CrossRef]
- Nelson, D.R.; Barber, D.B.; McLain, T.W.; Beard, R.W. Vector Field Path Following for Miniature Air Vehicles. IEEE Trans. Robot. 2007, 23, 519–529. [Google Scholar] [CrossRef]
- Lawrence, D.A.; Frew, E.W.; Pisano, W.J. Lyapunov Vector Fields for Autonomous Unmanned Aircraft Flight Control. J. Guid. Control Dyn. 2008, 31, 1220–1229. [Google Scholar] [CrossRef]
- Patrikar, J.; Makkapati, V.R.; Pattanaik, A.; Parwana, H.; Kothari, M. Nested Saturation Based Guidance Law for Unmanned Aerial Vehicles. J. Dyn. Syst. Meas. Control 2019, 141, 071008. [Google Scholar] [CrossRef]
- Kaminer, I.; Pascoal, A.; Xargay, E.; Hovakimyan, N.; Cao, C.; Dobrokhodov, V. Path Following for Small Unmanned Aerial Vehicles Using L1 Adaptive Augmentation of Commercial Autopilots. J. Guid. Control Dyn. 2010, 33, 550–564. [Google Scholar] [CrossRef]
- Kai, J.M.; Hamel, T.; Samson, C. A unified approach to fixed-wing aircraft path following guidance and control. Automatica 2019, 108, 108491. [Google Scholar] [CrossRef]
- Liu, C.; McAree, O.; Chen, W.H. Path-following control for small fixed-wing unmanned aerial vehicles under wind disturbances. Int. J. Robust Nonlinear Control 2013, 23, 1682–1698. [Google Scholar] [CrossRef]
- Cichella, V.; Xargay, E.; Dobrokhodov, V.; Kaminer, I.; Pascoal, A.; Hovakimyan, N. Geometric 3D Path-Following Control for a Fixed-Wing UAV on SO(3). In Proceedings of the 2011 IAA Guidance, Navigation, and Control Conference, Portland, OR, USA, 8–11 August 2011. [Google Scholar] [CrossRef]
- Andersen, T.S.; Kristiansen, R. Quaternion Path-Following in Three Dimensions for a Fixed-Wing UAV Using Quaternion Blending. In Proceedings of the 2018 IEEE Conference on Control Technology and Applications (CCTA), Copenhagen, Denmark, 21–24 August 2018; pp. 1597–1602. [Google Scholar] [CrossRef]
- Markley, F.L.; Crassidis, J.L. Fundamentals of Spacecraft Attitude Determination and Control; Springer: New York, NY, USA, 2014. [Google Scholar]
- Wen, J.T.Y.; Kreutz-Delgado, K. The attitude control problem. IEEE Trans. Autom. Control 1991, 36, 1148–1162. [Google Scholar] [CrossRef]
- Bhat, S.P.; Bernstein, D.S. A topological obstruction to continuous global stabilization of rotational motion and the unwinding phenomenon. Syst. Control Lett. 2000, 39, 63–70. [Google Scholar] [CrossRef]
- Chaturvedi, N.A.; Sanyal, A.K.; McClamroch, N.H. Rigid-Body Attitude Control. IEEE Control Syst. Mag. 2011, 31, 30–51. [Google Scholar] [CrossRef]
- Koditschek, D.E. The Application of Total Energy as a Lyapunov Function for Mechanical Control Systems. Contemp. Math. 1989, 97, 131. [Google Scholar]
- Bullo, F.; Murray, R.M. Tracking for fully actuated mechanical systems: A geometric framework. Automatica 1999, 35, 17–34. [Google Scholar] [CrossRef]
- Bertrand, S.; Hamel, T.; Piet-Lahanier, H.; Mahony, R. Attitude tracking of rigid bodies on the special orthogonal group with bounded partial state feedback. In Proceedings of the 48h IEEE Conference on Decision and Control (CDC) held jointly with 2009 28th Chinese Control Conference, Shanghai, China, 15–18 December 2009; pp. 2972–2977. [Google Scholar] [CrossRef]
- Chaturvedi, N.A.; McClamroch, N.H.; Bernstein, D.S. Asymptotic Smooth Stabilization of the Inverted 3-D Pendulum. IEEE Trans. Autom. Control 2009, 54, 1204–1215. [Google Scholar] [CrossRef]
- Lee, T. Exponential stability of an attitude tracking control system on SO(3) for large-angle rotational maneuvers. Syst. Control Lett. 2012, 61, 231–237. [Google Scholar] [CrossRef]
- Kalabić, U.V.; Gupta, R.; Di Cairano, S.; Bloch, A.M.; Kolmanovsky, I.V. MPC on manifolds with an application to the control of spacecraft attitude on SO(3). Automatica 2017, 76, 293–300. [Google Scholar] [CrossRef]
- Johansen, T.A.; Zolich, A.; Hansen, T.; Sorensen, A.J. Unmanned aerial vehicle as communication relay for autonomous underwater vehicle—Field tests. In Proceedings of the 2014 IEEE Globecom Workshops (GC Wkshps), Austin, TX, USA, 8–12 December 2014; pp. 1469–1474. [Google Scholar] [CrossRef]
- Carter, L.H.; Shamma, J.S. Gain-Scheduled Bank-to-Turn Autopilot Design Using Linear Parameter Varying Transformations. J. Guid. Control Dyn. 1996, 19, 1056–1063. [Google Scholar] [CrossRef]
- Fisher, T.; Sharma, R. Rudder-Augmented Trajectory Correction for Small Unmanned Aerial Vehicle to Minimize Lateral Image Errors. J. Aerosp. Inf. Syst. 2018, 15. [Google Scholar] [CrossRef]
- Anderson, J.D. Introduction to Flight; McGraw Hill: New York, NY, USA, 1989. [Google Scholar]
- Cabecinhas, D.; Silvestre, C.; Rosa, P.; Cunha, R. Path-Following Control for Coordinated Turn Aircraft Maneuvers. In Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, Hilton Head, SC, USA, 20–23 August 2007. [Google Scholar] [CrossRef]
- Leven, S.; Zufferey, J.; Floreano, D. A minimalist control strategy for small UAVs. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 2873–2878. [Google Scholar] [CrossRef]
- Corona-Sánchez, J.J.; Guzmán Caso, Ó.R.; Rodríguez-Cortés, H. A coordinated turn controller for a fixed-wing aircraft. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2019, 233, 1728–1740. [Google Scholar] [CrossRef]
- Gryte, K. Precision Control of Fixed-Wing UAV and Robust Navigation in GNSS-Denied Environments. Ph.D. Thesis, Norwegian University of Science and Technology (NTNU), Trondheim, Norway, 2020. [Google Scholar]
- Stephan, J.; Pfeifle, O.; Notter, S.; Pinchetti, F.; Fichter, W. Precise Tracking of Extended Three-Dimensional Dubins Paths for Fixed-Wing Aircraft. J. Guid. Control Dyn. 2020, 43, 2399–2405. [Google Scholar] [CrossRef]
- Available online: http://www.ardupilot.org (accessed on 28 February 2021).
- Meier, L.; Honegger, D.; Pollefeys, M. PX4: A node-based multithreaded open source robotics framework for deeply embedded platforms. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, DC, USA, 26–30 May 2015; pp. 6235–6240. [Google Scholar] [CrossRef]
- Bullo, F.; Murray, R.M.; Sarti, A. Control on the Sphere and Reduced Attitude Stabilization. In Proceedings of the 3rd IFAC Symposium on Nonlinear Control Systems Design 1995, Tahoe City, CA, USA, 25–28 June 1995; Volume 28, pp. 495–501. [Google Scholar] [CrossRef]
- Pong, C.M.; Miller, D.W. Reduced-Attitude Boresight Guidance and Control on Spacecraft for Pointing, Tracking, and Searching. J. Guid. Control Dyn. 2015, 38, 1027–1035. [Google Scholar] [CrossRef]
- Wrzos-Kaminska, M.; Pettersen, K.Y.; Gravdahl, J.T. Path following control for articulated intervention-AUVs using geometric control of reduced attitude. IFAC-PapersOnLine 2019, 52, 192–197. [Google Scholar] [CrossRef]
- Hua, M.; Hamel, T.; Morin, P.; Samson, C. A Control Approach for Thrust-Propelled Underactuated Vehicles and its Application to VTOL Drones. IEEE Trans. Autom. Control 2009, 54, 1837–1853. [Google Scholar]
- Casau, P.; Mayhew, C.G.; Sanfelice, R.G.; Silvestre, C. Robust global exponential stabilization on the n-dimensional sphere with applications to trajectory tracking for quadrotors. Automatica 2019, 110, 108534. [Google Scholar] [CrossRef]
- Mayhew, C.G.; Teel, A.R. Global stabilization of spherical orientation by synergistic hybrid feedback with application to reduced-attitude tracking for rigid bodies. Automatica 2013, 49, 1945–1957. [Google Scholar] [CrossRef]
- Ramp, M.; Papadopoulos, E. Attitude and angular velocity tracking for a rigid body using geometric methods on the two-sphere. In Proceedings of the 2015 European Control Conference (ECC), Linz, Austria, 15–17 July 2015; pp. 3238–3243. [Google Scholar]
- Lee, T. Optimal hybrid controls for global exponential tracking on the two-sphere. In Proceedings of the 2016 IEEE 55th Conference on Decision and Control (CDC), Las Vegas, NV, USA, 12–14 December 2016; pp. 3331–3337. [Google Scholar] [CrossRef]
- Lee, T.; Leok, M.; McClamroch, N.H. Stable manifolds of saddle equilibria for pendulum dynamics on S2 and SO(3). In Proceedings of the 2011 50th IEEE Conference on Decision and Control and European Control Conference, Orlando, FL, USA, 12–15 December 2011; pp. 3915–3921. [Google Scholar] [CrossRef]
- Mayhew, C.G.; Sanfelice, R.G.; Teel, A.R. Quaternion-Based Hybrid Control for Robust Global Attitude Tracking. IEEE Trans. Autom. Control 2011, 56, 2555–2566. [Google Scholar] [CrossRef]
- Mayhew, C.G.; Teel, A.R. Synergistic Hybrid Feedback for Global Rigid-Body Attitude Tracking on SO(3). IEEE Trans. Autom. Control 2013, 58, 2730–2742. [Google Scholar] [CrossRef]
- Lee, T. Global Exponential Attitude Tracking Controls on SO(3). IEEE Trans. Autom. Control 2015, 60, 2837–2842. [Google Scholar] [CrossRef]
- Berkane, S.; Abdessameud, A.; Tayebi, A. Hybrid global exponential stabilization on SO(3). Automatica 2017, 81, 279–285. [Google Scholar] [CrossRef]
- Oland, E.; Kristiansen, R. A Decoupled Approach for Flight Control. Model. Identif. Control 2016, 37, 237–246. [Google Scholar] [CrossRef][Green Version]
- Oland, E.; Kristiansen, R.; Gravdahl, J.T. A Comparative Study of Different Control Structures for Flight Control with New Results. IEEE Trans. Control Syst. Technol. 2020, 28, 291–305. [Google Scholar] [CrossRef]
- Mitikiri, Y.; Mohseni, K. Attitude Control of Micro/Mini Aerial Vehicles and Estimation of Aerodynamic Angles Formulated as Parametric Uncertainties. IEEE Robot. Autom. Lett. 2018, 3, 2063–2070. [Google Scholar] [CrossRef]
- Mitikiri, Y.; Mohseni, K. Globally Stable Attitude Control of a Fixed-Wing Rudderless UAV Using Subspace Projection. IEEE Robot. Autom. Lett. 2019, 4, 1395–1401. [Google Scholar] [CrossRef]
- Poksawat, P.; Wang, L.; Mohamed, A. Gain Scheduled Attitude Control of Fixed-Wing UAV with Automatic Controller Tuning. IEEE Trans. Control Syst. Technol. 2018, 26, 1192–1203. [Google Scholar] [CrossRef]
- Chaturvedi, N.; McClamroch, H. Asymptotic Stabilization of the Inverted Equilibrium Manifold of the 3-D Pendulum Using Non-Smooth Feedback. IEEE Trans. Autom. Control 2009, 54, 2658–2662. [Google Scholar] [CrossRef]
- Markdahl, J.; Hoppe, J.; Wang, L.; Hu, X. A geodesic feedback law to decouple the full and reduced attitude. Syst. Control Lett. 2017, 102, 32–41. [Google Scholar] [CrossRef][Green Version]
- Kooijman, D.; Schoellig, A.P.; Antunes, D.J. Trajectory Tracking for Quadrotors with Attitude Control on S2×S1. In Proceedings of the 2019 18th European Control Conference (ECC), Naples, Italy, 25–28 June 2019; pp. 4002–4009. [Google Scholar] [CrossRef]
- Gamagedara, K.; Bisheban, M.; Kaufman, E.; Lee, T. Geometric Controls of a Quadrotor UAV with Decoupled Yaw Control. In Proceedings of the 2019 American Control Conference (ACC), Philadelphia, PA, USA, 10–12 July 2019; pp. 3285–3290. [Google Scholar] [CrossRef]
- Brescianini, D.; D’Andrea, R. Tilt-Prioritized Quadrocopter Attitude Control. IEEE Trans. Control Syst. Technol. 2020, 28, 376–387. [Google Scholar] [CrossRef]
- Spitzer, A.; Michael, N. Rotational Error Metrics for Quadrotor Control. arXiv 2020, arXiv:cs.RO/2011.11909. [Google Scholar]
- Hernández Ramírez, J.C.; Nahon, M. Nonlinear Vector-Projection Control for Agile Fixed-Wing Unmanned Aerial Vehicles. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 5314–5320. [Google Scholar] [CrossRef]
- Bøhn, E.; Coates, E.M.; Moe, S.; Johansen, T.A. Deep Reinforcement Learning Attitude Control of Fixed-Wing UAVs Using Proximal Policy optimization. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019; pp. 523–533. [Google Scholar] [CrossRef]
- Reinhardt, D.; Johansen, T.A. Nonlinear Model Predictive Attitude Control for Fixed-Wing Unmanned Aerial Vehicle based on a Wind Frame Formulation. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019; pp. 503–512. [Google Scholar] [CrossRef]
- Coates, E.M.; Reinhardt, D.; Fossen, T.I. Reduced-Attitude Control of Fixed-Wing Unmanned Aerial Vehicles Using Geometric Methods on the Two-Sphere. IFAC-PapersOnLine 2021, in press. [Google Scholar]
- Reinhardt, D.; Coates, E.M.; Johansen, T.A. Hybrid Control of Fixed-Wing UAVs for Large-Angle Attitude Maneuvers on the Two-Sphere. IFAC-PapersOnLine 2021, in press. [Google Scholar]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; Wiley-Blackwell: Hoboken, NJ, USA, 2011. [Google Scholar]
- Jategaonkar, R.V. Flight Vehicle System Identification: A Time-Domain Methodology, 2nd ed.; American Institute of Aeronautics and Astronautics, Inc.: Reston, VA, USA, 2015. [Google Scholar]
- Morelli, E.A.; Klein, V. Aircraft System Identification: Theory and Practice, 2nd ed.; Sunflyte Enterprises: Williamsburg, VA, USA, 2016. [Google Scholar]
- Stevens, B.L.; Lewis, F.L.; Johnson, E.N. Aircraft Control and Simulation; Wiley-Blackwell: Hoboken, NJ, USA, 2016. [Google Scholar]
- O’Dell, C.R. The Physics of Aerobatic Flight. Phys. Today 1987, 40, 24–30. [Google Scholar] [CrossRef]
- Khan, W.; Nahon, M. Development and Validation of a Propeller Slipstream Model for Unmanned Aerial Vehicles. J. Aircr. 2015, 52, 1985–1994. [Google Scholar] [CrossRef]
- Abichandani, P.; Lobo, D.; Ford, G.; Bucci, D.; Kam, M. Wind Measurement and Simulation Techniques in Multi-Rotor Small Unmanned Aerial Vehicles. IEEE Access 2020, 8, 54910–54927. [Google Scholar] [CrossRef]
- Tian, P.; Chao, H.; Rhudy, M.; Gross, J.; Wu, H. Wind Sensing and Estimation Using Small Fixed-Wing Unmanned Aerial Vehicles: A Survey. J. Aerosp. Inf. Syst. 2021, 18. [Google Scholar] [CrossRef]
- Ramprasadh, C.; Arya, H. Multistage-Fusion Algorithm for Estimation of Aerodynamic Angles in Mini Aerial Vehicle. J. Aircr. 2012, 49, 93–100. [Google Scholar] [CrossRef]
- Johansen, T.A.; Cristofaro, A.; Sørensen, K.; Hansen, J.M.; Fossen, T.I. On estimation of wind velocity, angle-of-attack and sideslip angle of small UAVs using standard sensors. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; pp. 510–519. [Google Scholar] [CrossRef]
- Wenz, A.; Johansen, T.A. Moving Horizon Estimation of Air Data Parameters for UAVs. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 2101–2121. [Google Scholar] [CrossRef]
- Khalil, H.K. Nonlinear Systems, 3rd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Angeli, D. An almost global notion of input-to-State stability. IEEE Trans. Autom. Control 2004, 49, 866–874. [Google Scholar] [CrossRef]
- Rantzer, A. A dual to Lyapunov’s stability theorem. Syst. Control Lett. 2001, 42, 161–168. [Google Scholar] [CrossRef]
- Vasconcelos, J.; Rantzer, A.; Silvestre, C.; Oliveira, P.J. Combination of Lyapunov and Density Functions for Stability of Rotational Motion. IEEE Trans. Autom. Control 2011, 56, 2599–2607. [Google Scholar] [CrossRef]
- Angeli, D.; Praly, L. Stability Robustness in the Presence of Exponentially Unstable Isolated Equilibria. IEEE Trans. Autom. Control 2011, 56, 1582–1592. [Google Scholar] [CrossRef]
- Berkane, S.; Tayebi, A. On the Design of Attitude Complementary Filters on SO(3). IEEE Trans. Autom. Control 2018, 63, 880–887. [Google Scholar] [CrossRef]
- Lambregts, A.A. Vertical Flight Path and Speed Control Autopilot Design Using Total Energy Principles. In Proceedings of the AIAA Guidance and Control Conference, Gatlinburg, TN, USA, 15–17 August 1983. [Google Scholar] [CrossRef]
- Micaelli, A.; Samson, C. Trajectory Tracking for Unicycle-Type and Two-Steering-Wheels Mobile Robots; Technical Report 2097; University: Strasbourg.
- Berkane, S. Hybrid Attitude Control and Estimation On SO(3). Ph.D. Thesis, University of Western Ontario, London, ON, Canada, 2017. [Google Scholar]
- Ioannou, P.A.; Sun, J. Robust Adaptive Control; Dover Publications, Inc.: Mineola, NY, USA, 2012. [Google Scholar]
- Hosseinzadeh, M.; Yazdanpanah, M.J. Performance enhanced model reference adaptive control through switching non-quadratic Lyapunov functions. Syst. Control Lett. 2015, 76, 47–55. [Google Scholar] [CrossRef]














Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Coates, E.M.; Fossen, T.I. Geometric Reduced-Attitude Control of Fixed-Wing UAVs. Appl. Sci. 2021, 11, 3147. https://doi.org/10.3390/app11073147
Coates EM, Fossen TI. Geometric Reduced-Attitude Control of Fixed-Wing UAVs. Applied Sciences. 2021; 11(7):3147. https://doi.org/10.3390/app11073147
Chicago/Turabian StyleCoates, Erlend M., and Thor I. Fossen. 2021. "Geometric Reduced-Attitude Control of Fixed-Wing UAVs" Applied Sciences 11, no. 7: 3147. https://doi.org/10.3390/app11073147
APA StyleCoates, E. M., & Fossen, T. I. (2021). Geometric Reduced-Attitude Control of Fixed-Wing UAVs. Applied Sciences, 11(7), 3147. https://doi.org/10.3390/app11073147