
Detection of Quasi-Static Trapped Human Being Using Mono-Static UWB Life-Detection Radar


Abstract
:1. Introduction
2. Material and Methods
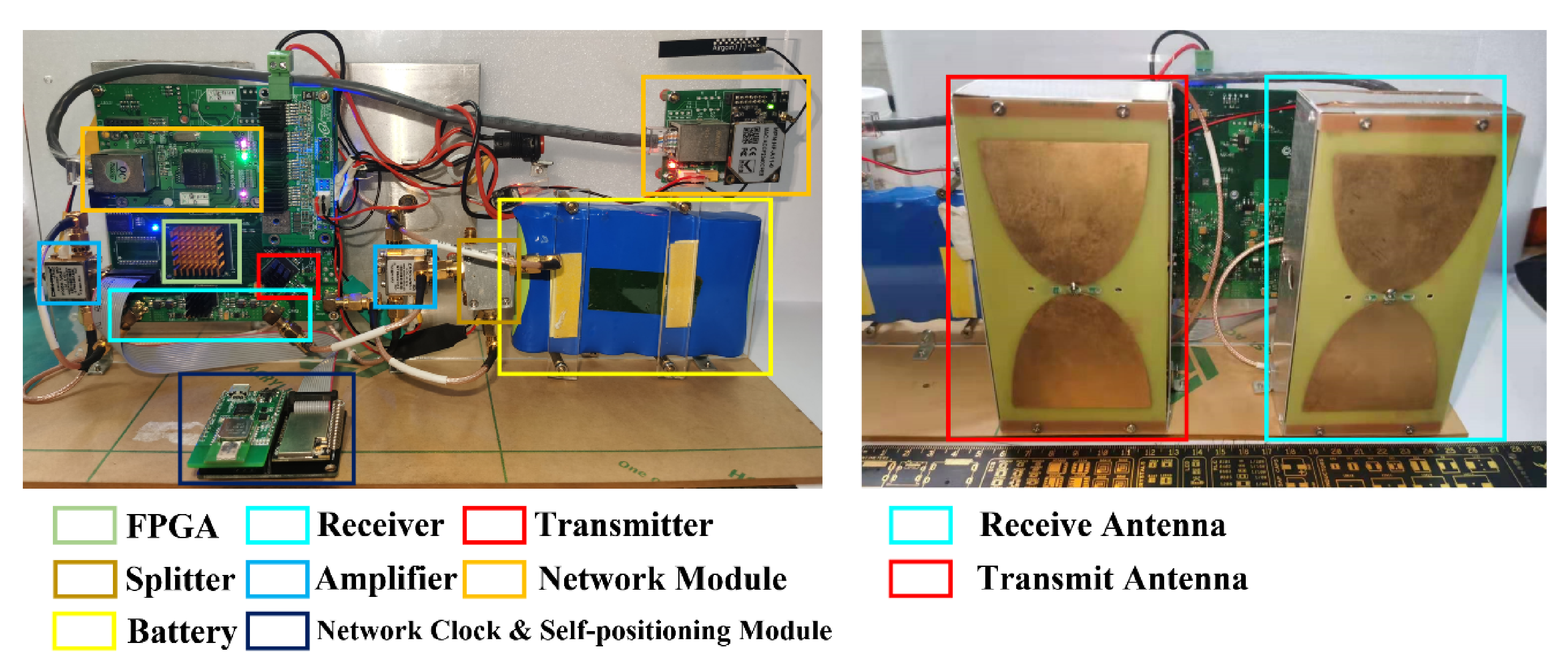
2.1. The UWB Life-Detection Radar Hardware System Design
2.1.1. The Golay Complementary Coded UWB Radar
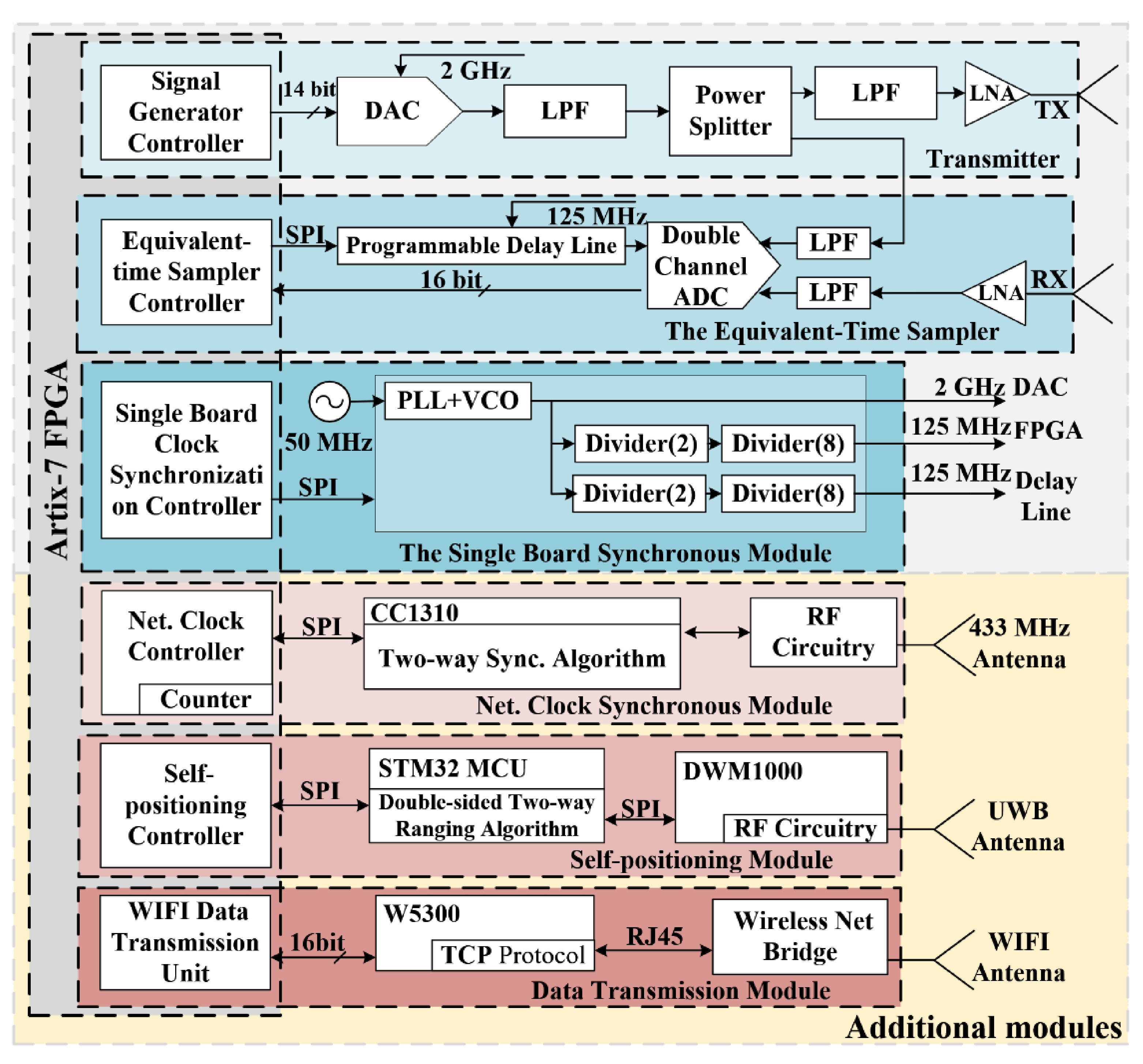
2.1.2. The Radar System
2.1.3. The Design of Single Golay-Coded Radar
2.1.4. The Additional Modules for Scanning Operating Mode
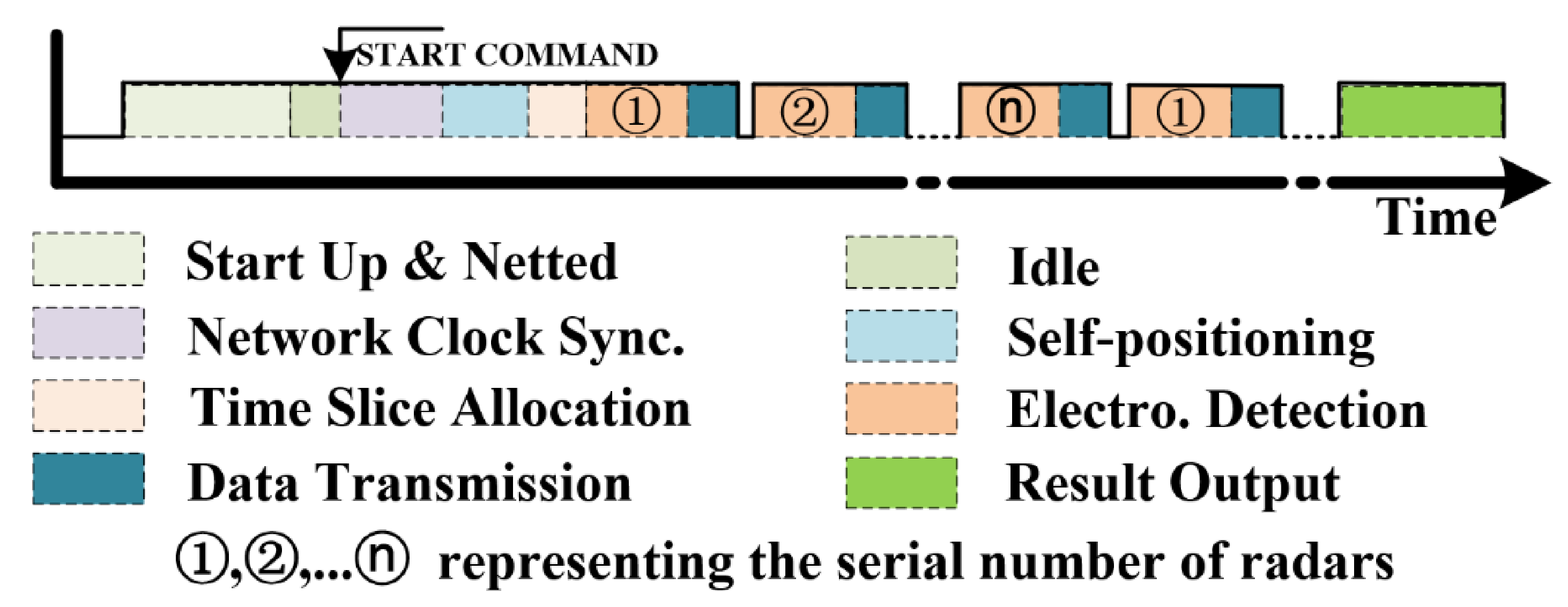
2.1.5. The Workflow for Scanning Operating Mode
2.2. Vital Sign Detection Using a Mono-Static UWB Life-Detection Radar
2.2.1. Background
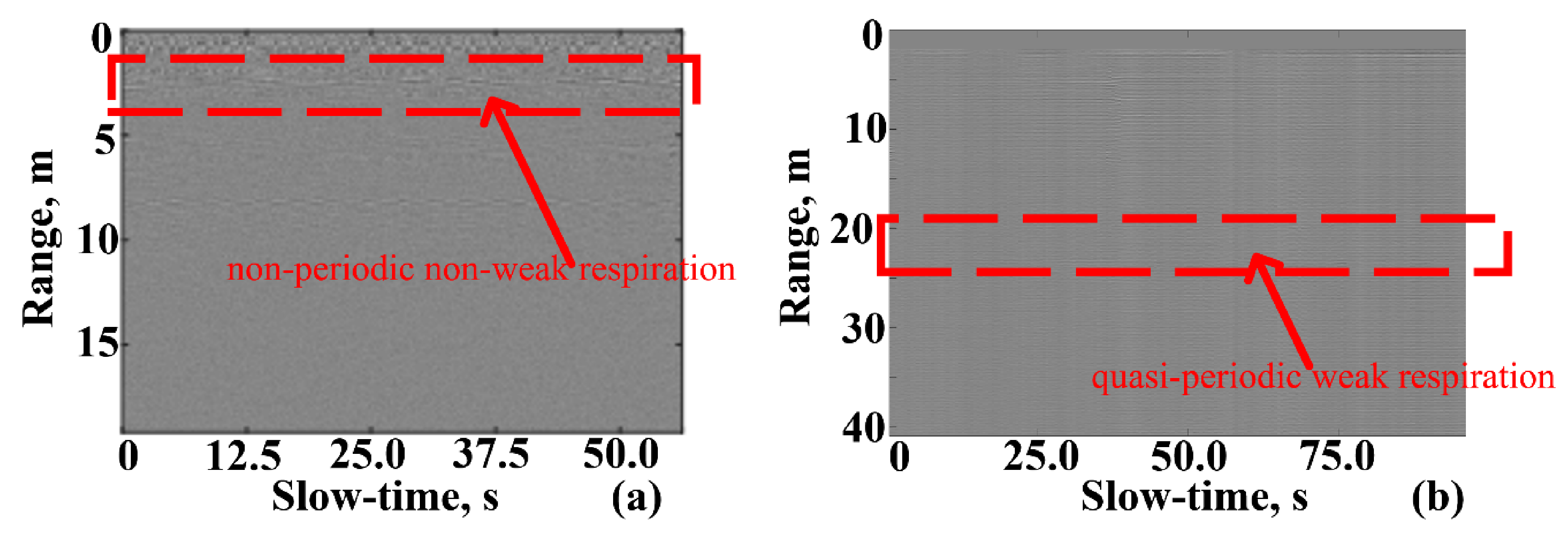
2.2.2. Two Types of Vital Signs
2.2.3. Algorithm for Stationary Operating Mode
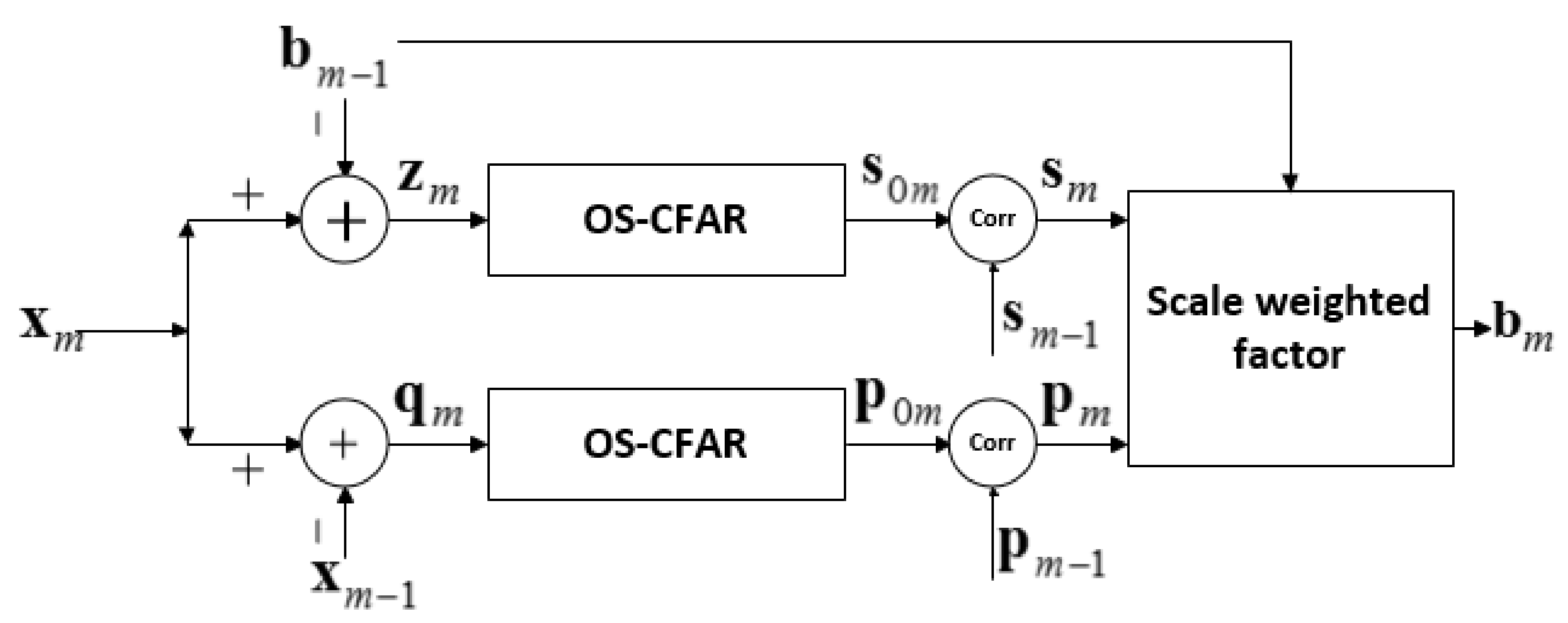
2.2.4. Algorithm for Scanning Operating Mode
3. Experimental Results
3.1. Experimental Results for Stationary Operating Mode
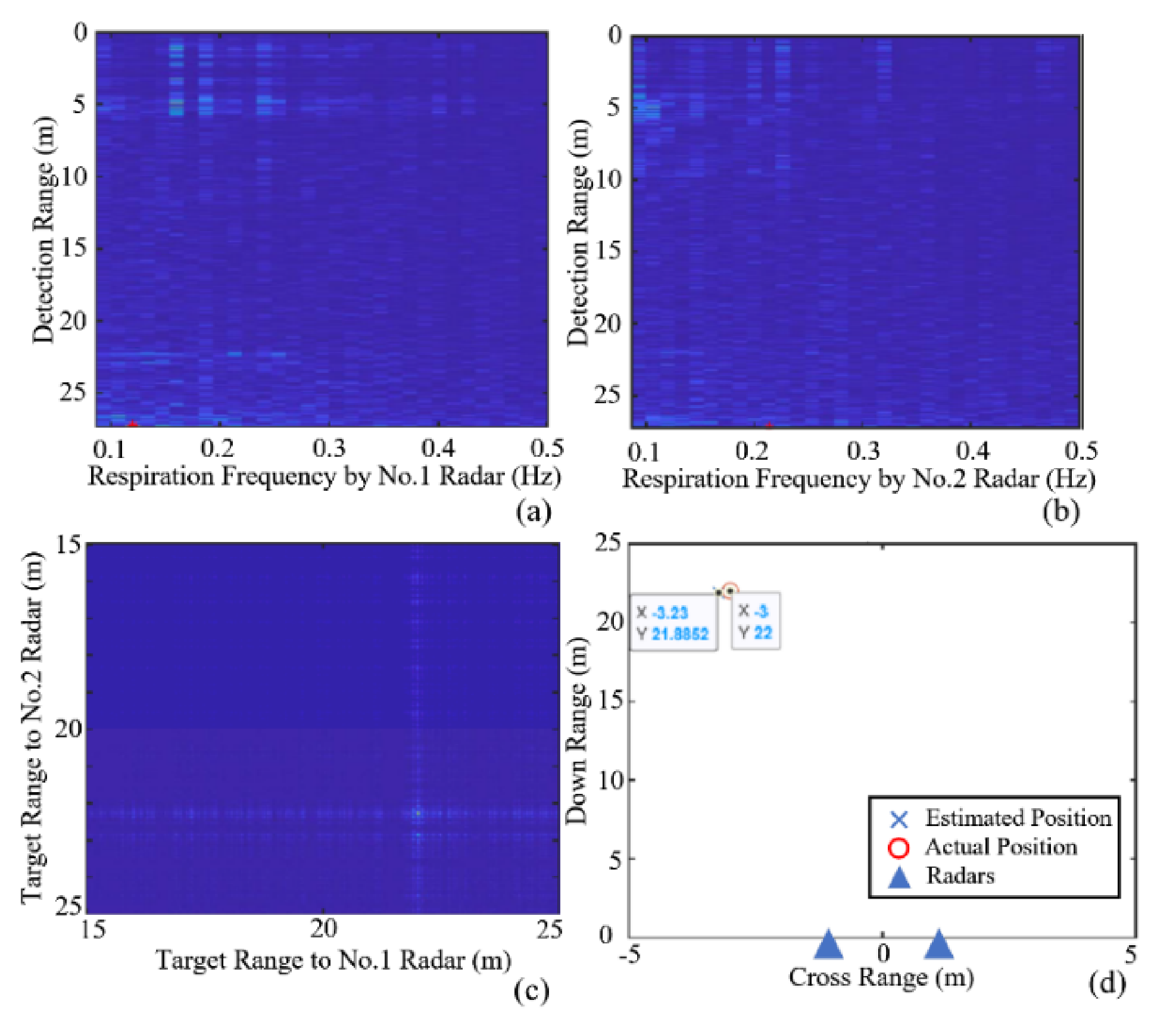
3.2. Experimental Results for Scanning Operating Mode
3.2.1. The Type-I Experiment
3.2.2. The Type-II Experiment
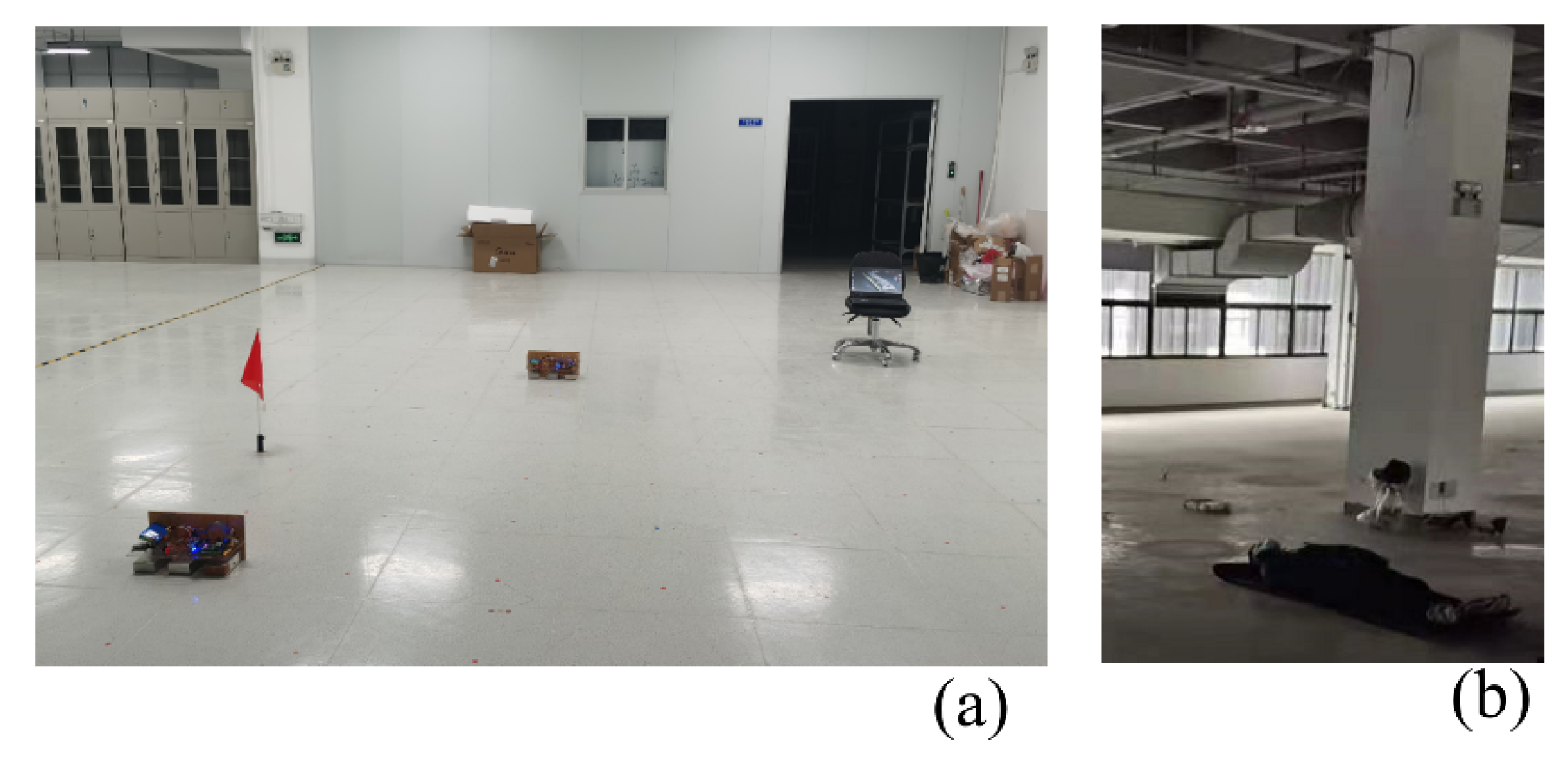
3.2.3. The Ruins Experiment
3.2.4. The Multistorey Building Experiment
4. Discussion
- (1)
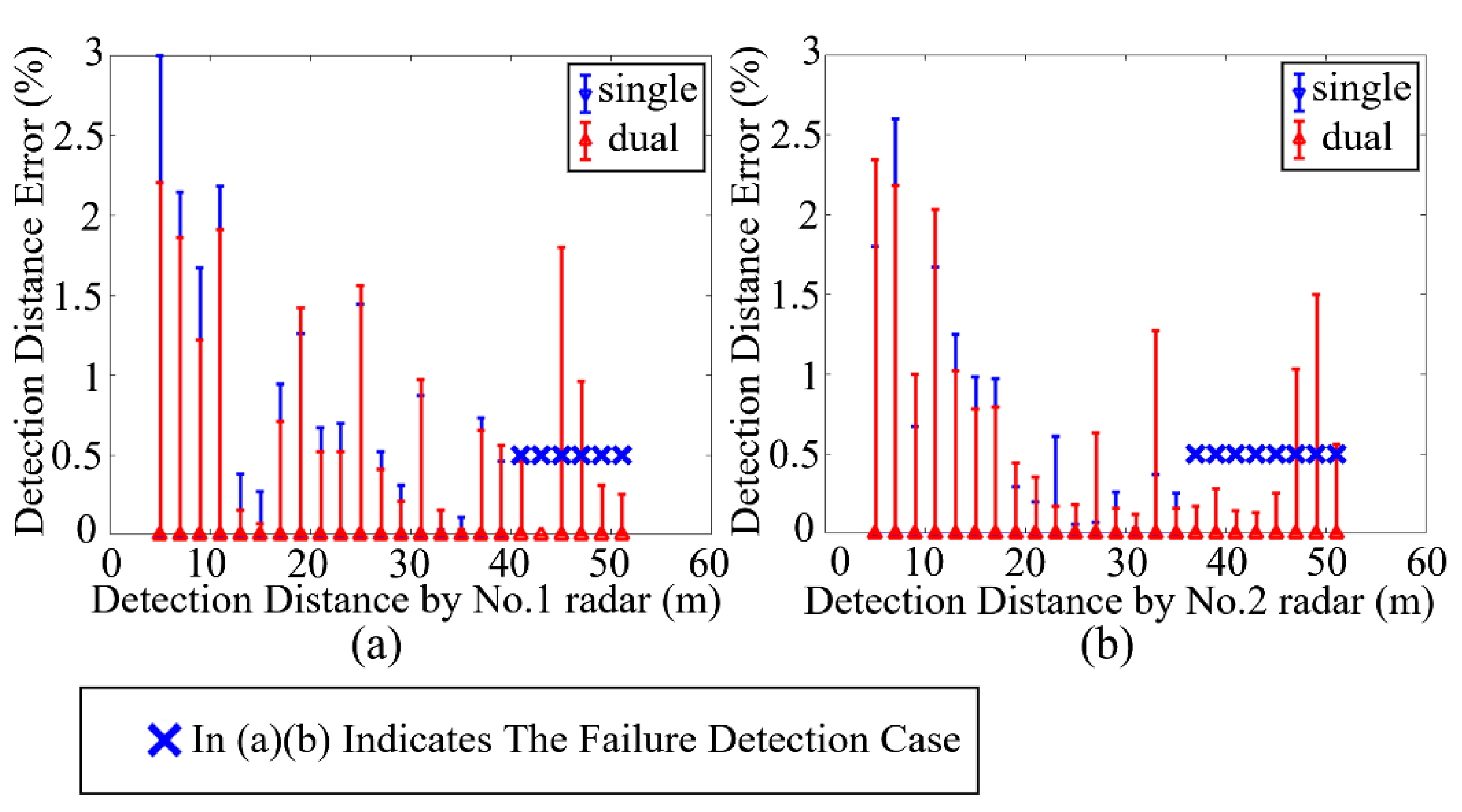
- When the distance between the beacon and the Golay-coded radar is within 35 m, compared to the “FFT-based respiration detection method”, the “scanning operating mode” always gives the results with higher accuracy.
- (2)
- When the distance between the beacon and the Golay-coded radar ranges from 37 to 39 m, the No. 2 radar fails to locate the target using the “FFT-based respiration detection method”. Notably, the “scanning operating mode” can avoid the misjudgment to give the correct result.
- (3)
- The most attractive case: When the distance between the beacon and the Golay-coded radar is longer than 41 m, the “FFT-based respiration detection method” fails to provide the correct location of the target due to the two failure observation points, while the “scanning operating mode” can still work.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Yilmaz, B.; Ozdemir, C. A Radar Sensor Design and Prototype for Through-the-wall Imaging Radar Applications. In Proceedings of the Radar Methods & Systems Workshop IEEE, Kiev, Ukraine, 27–28 September 2016; pp. 60–63. [Google Scholar] [CrossRef]
- Qiu, L.; Jin, T.; He, Y.; Lu, B.; Zhou, Z. Sparse and low-rank matrix decomposition based micro-motion target indication in through-the-wall radar. Electron. Lett. 2017, 53, 191–192. [Google Scholar] [CrossRef]
- Wang, X.; Li, G.; Liu, Y.; Amin, M.G. Two-level block matching pursuit for polarimetric through-wall radar imaging. IEEE Trans. Geosci. Remote Sens. 2018, 56, 1–13. [Google Scholar] [CrossRef]
- Song, Y.; Hu, J.; Chu, N.; Jin, T.; Zhang, J.; Zhou, Z. Building layout reconstruction in concealed human target sensing via UWB MIMO through-wall imaging radar. IEEE Geosci. Remote Sens. Lett. 2018, 15, 1199. [Google Scholar] [CrossRef]
- Tivive, F.H.C.; Bouzerdoum, A.; Amin, M.G. A subspace projection approach for wall clutter mitigation in through-the-wall radar imaging. IEEE Trans. Geosci. Remote Sens. 2014, 53, 2108. [Google Scholar] [CrossRef] [Green Version]
- Martone, A.F.; Ranney, K.; Le, C. Noncoherent approach for through-the-wall moving target indication. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 193. [Google Scholar] [CrossRef]
- Nezirovic, A.; Yarovoy, A.G.; Ligthart, L.P. Signal processing for improved detection of trapped victims using uwb radar. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2005–2014. [Google Scholar] [CrossRef]
- Ding, Y.; Lei, C.; Xu, X.; Sun, K.; Wang, L. Human micro-doppler frequency estimation approach for doppler radar. IEEE Access 2018, 6, 6149–6159. [Google Scholar] [CrossRef]
- Liu, Z.; Kim, Y.; Bien, F. Indoor positioning and life detection by using asynchronous multiple frequency shift keying radar. Electron. Lett. 2015, 51, 1817–1819. [Google Scholar] [CrossRef]
- Liu, L.; Liu, Z.; Barrowes, B.E. Through-wall bio-radiolocation with UWB impulse radar - observation, simulation and signal extraction. IEEE J. STARS 2011, 4, 791–798. [Google Scholar] [CrossRef]
- Sakamoto, T.; Imasaka, R.; Taki, H.; Sato, T.; Yoshioka, M.; Inoue, K.; Fukuda, T.; Sakai, H. Accurate heartbeat monitoring using ultra-wideband radar. IEICE Electron. Expr. 2015, 12, 20141197. [Google Scholar] [CrossRef] [Green Version]
- Liu, X.; Zhang, J.; Guo, R.; Yang, G.; Ye, S.; Wu, S.; Fang, G. A novel interferometry positioning and tracking method with short baseline for UWB through-the-wall radar system. In Proceedings of the 17th International Conference on Ground Penetrating Radar (GPR), Rapperswil, Switzerland, 18–21 June 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Dell’Aversano, A.; Natale, A.; Buonanno, A.; Solimene, R. Through the wall breathing detection by means of a doppler radar and MUSIC algorithm. IEEE Sens. Lett. 2017, 1, 3500904. [Google Scholar] [CrossRef]
- Wang, K.; Zeng, Z.; Sun, J. Through-Wall detection of the moving paths and vital signs of human beings. IEEE Geosci. Remote Sens. Lett. 2019, 16, 717. [Google Scholar] [CrossRef]
- Ding, Y.; Sun, Y.; Zhang, J.; Wang, L. Multiperspective target tracking approach for Doppler through-wall radar. IEEE Geosci. Remote Sens. Lett. 2018, 15, 1020. [Google Scholar] [CrossRef]
- Xia, Z.; Fang, G.; Ye, S.; Zhang, Q.; Chen, C.; Yin, H. A novel handheld pseudo random coded UWB radar for human sensing applications. IEICE Electron. Expr. 2014, 11, 20140981. [Google Scholar] [CrossRef] [Green Version]
- Ash, M.; Ritchie, M.; Chetty, K. On the application of digital moving target indication techniques to short-range FMCW radar data. IEEE Sens. J. 2018, 18, 4167–4175. [Google Scholar] [CrossRef] [Green Version]
- Ahmad, F.; Zhang, Y.; Amin, M.G. Three-dimensional wideband beamforming for imaging through a single wall. IEEE Geosci. Remote. Sens. Lett. 2008, 5, 176–179. [Google Scholar] [CrossRef] [Green Version]
- Xu, Y.; Wu, S.; Shao, J.; Chen, J.; Fang, G. Life Detection and Location by MIMO Ultra Wideband Radar. In Proceedings of the 14th International Conference on Ground Penetrating Radar (GPR), Shanghai, China, 4–8 June 2012; pp. 80–84. [Google Scholar] [CrossRef]
- Liu, J.; Kong, L.; Yang, X.; Liu, Q.H. First-order multipath ghosts’ characteristics and suppression in MIMO through-wall imaging. IEEE Geosci. Remote. Sens. Lett. 2017, 13, 1315–1319. [Google Scholar] [CrossRef]
- Jia, Y.; Guo, Y.; Chen, S.; Song, R.; Wang, G.; Zhong, X.; Yan, C.; Cui, G. Multipath ghost and side/grating lobe suppression based on stacked generative adversarial nets in MIMO through-wall radar imaging. IEEE Access 2019, 7, 143367. [Google Scholar] [CrossRef]
- Adib, F.; Hsu, C.Y.; Mao, H.; Katabi, D.; Durand, F. Capturing the human figure through a wall. ACM Trans. Graph. 2017, 34, 1. [Google Scholar] [CrossRef]
- Geng, Z. Evolution of netted radar systems. IEEE Access 2020, 8, 124961–124977. [Google Scholar] [CrossRef]
- Jia, Y.; Guo, Y.; Yan, C.; Sheng, H.; Zhong, X. Detection and localization for multiple stationary human targets based on cross-correlation of dual-station SFCW radars. Remote Sens. 2019, 11, 1428. [Google Scholar] [CrossRef] [Green Version]
- Hunt, A.R. Image Formation Through Walls using a Distributed Radar Sensor Array. In Proceedings of the 32nd Applied Imagery Pattern Recognition Workshop, Washington, DC, USA, 15–17 October 2003; pp. 232–237. [Google Scholar] [CrossRef]
- Debes, C.; Amin, M.G.; Zoubir, A.M. Target detection in single-and multiple-view through-the-wall radar imaging. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1349–1361. [Google Scholar] [CrossRef] [Green Version]
- Xia, Z.; Zhang, Q.; Ye, S.; Wang, Y.; Chen, C.; Yin, H.; Fang, G. A novel low-frequency coded ground penetrating radar for deep detection. IEICE Electron. Expr. 2015, 12, 20150200. [Google Scholar] [CrossRef] [Green Version]
- Golay, M.J.E. Complementary series. IEEE Trans. Inf. Theory 1961, 7, 82–87. [Google Scholar] [CrossRef]
- Liu, X.; Yan, K.; Chen, Z.; Li, C.; Zhang, J.; Ye, S.; Fang, G. A m-sequence UWB radar system design and contrast test with an impulse radar. In Proceedings of the 17th International Conference on Ground Penetrating Radar (GPR), Rapperswil, Switzerland, 18–21 June 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Zaikov, E. UWB radar for detection and localization of trapped people. In Proceedings of the 11th International Radar Symposium, Vilnius, Lithuania, 16–18 June 2010; pp. 1–4. [Google Scholar] [CrossRef]
- Texas Instruments: Time Synchronization Over the Air. 2017. Available online: https://software-dl.ti.com/simplelink/esd/simplelink_cc13x2_26x2_sdk/3.30.00.03/exports/docs/proprietary-rf/proprietary-rf-users-guide/proprietary-rf/time-synchronization.html#equation-eq-process-offset (accessed on 30 March 2021).
- Decawave: DWM1000 Module. 2016. Available online: https://www.decawave.com/product/dwm1000-module (accessed on 30 March 2021).
- Novoselov, S.; Donskov, O. Distributed local positioning system using DWM1000 location chip. In Proceedings of the 4th International Scientific-Practical Conference Problems of Infocommunications, Science and Technology (PIC S&T), Kharkov, Ukraine, 10–13 October 2017; pp. 489–492. [Google Scholar] [CrossRef]
- Gu, Y.; Yang, B. Clock compensation two-way ranging (CC-TWR) based on ultra-wideband communication. In Proceedings of the 8th International Conference on Instrumentation & Measurement, Computer, Communication and Control (IMCCC), Computer, Harbin, China, 19–21 June 2018; pp. 1145–1150. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, Z.; Gao, N.; Xiao, Y.; Meng, Z.; Li, Z. Cost-Effective Wearable Indoor Localization and Motion Analysis via the Integration of UWB and IMU. Sensors 2020, 20, 344. [Google Scholar] [CrossRef] [Green Version]
- Sang, C.L.; Steinhagen, B.; Homburg, J.D.; Adams, M.; Hesse, M.; Rückert, U. Identification of NLOS and Multi-Path Conditions in UWB Localization Using Machine Learning Methods. Appl. Sci. 2020, 10, 3980. [Google Scholar] [CrossRef]
- Daniels, D.J. Ground Penetrating Radar; IEE Press: Piscataway, NJ, USA, 2004. [Google Scholar]
- Zetik, R.; Crabbe, S.; Krajnak, J.; Peyerl, P.; Sachs, J.; Thomä, R. Detection and localization of persons behind obstacles using M-sequence through-the-wall radar. In Proceedings of the Conference on Sensors, and Command, Control, Communications, and Intelligence(C3I) Technologies for Homeland Security and Homeland Defense V, Kissimmee, FL, USA, 17 April 2006; p. 20060417. [Google Scholar]
- Wu, S.; Tan, K.; Xia, Z.; Chen, J. Improved human respiration detection method via ultra-wideband radar in through-wall or other similar conditions. IET Radar Sonar Navig. 2016, 10, 468. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Radar Name | Developer | Max Distance (m) | Characteristics |
|---|---|---|---|
| Xaver | Camero (Israel) | 8 | pulse radar, portable |
| LifeLocator TRx | GSSI * (USA) | 12 | pulse radar, earlier used |
| CE400 | NovaSky (China) | 20 | FMCW radar, MIMO, bulky |
| Jia [24] | UESTC * (China) | 5 | SFCW * radar, dual-station |
| “RF-Capture” [22] | MIT * (USA) | 3 | FMCW radar, MIMO, 5.46~7.24 GHz |
| Xia [16] | IECAS * (China) | 12.5 | Pseudo-random radar, portable |
| Parameters | Value |
|---|---|
| Equivalent sampling frequency () | 16 GSPS * |
| Real-time sampling frequency | 125 MSPS * |
| Sampling points () | 16,384 |
| Average times () | 32 |
| ADC * Resolution | 16 bits |
| Measurement No. | The Actual Distance between No. 1 Radar and Target | The Actual Distance between No. 2 Radar and Target | FFT *-Based Respiration Detection Method | Measuring Error | Scanning Operating Mode Method | Measuring Error | ||||
|---|---|---|---|---|---|---|---|---|---|---|
| No. 1 Radar Result | No. 2 Radar Result | No. 1 Radar Result | No. 2 Radar Result | No. 1 Radar Result | No. 2 Radar Result | No. 1 Radar Result | No. 2 Radar Result | |||
| 1 | 5 m | 5.31 m | 4.85 m | 5.41 m | −3.00% | 1.80% | 4.89 m | 5.19 m | −2.20% | −2.34% |
| 2 | 7 m | 7.23 m | 6.85 m | 7.04 m | −2.14% | −2.60% | 6.87 m | 7.07 m | −1.86% | −2.18% |
| 3 | 9 m | 9.18 m | 8.85 m | 9.24 m | −1.67% | 0.67% | 8.89 m | 9.27 m | −1.22% | 1.00% |
| 4 | 11 m | 11.15 m | 10.76 m | 10.96 m | −2.18% | −1.67% | 10.79 m | 10.92 m | −1.91% | −2.03% |
| 5 | 13 m | 13.12 m | 12.95 m | 12.96 m | −0.38% | −1.25% | 12.98 m | 12.99 m | −0.15% | −1.02% |
| 6 | 15 m | 15.11 m | 14.96 m | 14.96 m | −0.27% | −0.98% | 14.99 m | 14.99 m | −0.07% | −0.78% |
| 7 | 17 m | 17.10 m | 16.84 m | 16.93 m | −0.94% | −0.97% | 16.88 m | 16.96 m | −0.71% | −0.79% |
| 8 | 19 m | 19.09 m | 19.24 m | 19.14 m | 1.26% | 0.29% | 19.27 m | 19.17 m | 1.42% | 0.44% |
| 9 | 21 m | 21.08 m | 20.86 m | 21.12 m | −0.67% | 0.20% | 20.89 m | 21.15 m | −0.52% | 0.35% |
| 10 | 23 m | 23.07 m | 22.84 m | 22.93 m | −0.70% | −0.61% | 22.88 m | 23.03 m | −0.52% | −0.17% |
| 11 | 25 m | 25.06 m | 25.36 m | 25.08 m | 1.44% | 0.06% | 25.39 m | 25.11 m | 1.56% | 0.18% |
| 12 | 27 m | 27.06 m | 26.86 m | 27.08 m | −0.52% | 0.07% | 26.89 m | 26.89 m | −0.41% | −0.63% |
| 13 | 29 m | 29.06 m | 28.91 m | 28.98 m | −0.31% | −0.26% | 28.94 m | 29.01 m | −0.21% | −0.16% |
| 14 | 31 m | 31.05 m | 31.27 m | 31.06 m | 0.87% | 0.03% | 31.3 m | 31.09 m | 0.97% | 0.12% |
| 15 | 33 m | 33.05 m | 33.01 m | 33.17 m | 0.03% | 0.37% | 32.95 m | 32.63 m | −0.15% | −1.27% |
| 16 | 35 m | 35.05 m | 34.96 m | 34.96 m | −0.11% | −0.25% | 34.99 m | 34.99 m | −0.03% | −0.16% |
| 17 | 37 m | 37.04 m | 37.27 m | Failure | 0.73% | - | 37.24 m | 36.98 m | 0.65% | −0.17% |
| 18 | 39 m | 39.04 m | 39.18 m | Failure | 0.46% | - | 39.22 m | 39.15 m | 0.56% | 0.28% |
| 19 | 41 m | 41.04 m | Failure | Failure | - | - | 41.19 m | 40.98 m | 0.46% | −0.14% |
| 20 | 43 m | 43.04 m | Failure | Failure | - | - | 43 m | 42.98 m | 0.00% | −0.13% |
| 21 | 45 m | 45.04 m | Failure | Failure | - | - | 44.19 m | 45.15 m | −1.80% | 0.25% |
| 22 | 47 m | 47.03 m | Failure | Failure | - | - | 46.55 m | 46.55 m | −0.96% | −1.03% |
| 23 | 49 m | 49.03 m | Failure | Failure | - | - | 48.85 m | 48.3 m | −0.31% | −1.50% |
| 24 | 51 m | 51.03 m | Failure | Failure | - | - | 50.87 m | 51.32 m | −0.25% | 0.56% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, K.; Wu, S.; Fang, G. Detection of Quasi-Static Trapped Human Being Using Mono-Static UWB Life-Detection Radar. Appl. Sci. 2021, 11, 3129. https://doi.org/10.3390/app11073129
Yan K, Wu S, Fang G. Detection of Quasi-Static Trapped Human Being Using Mono-Static UWB Life-Detection Radar. Applied Sciences. 2021; 11(7):3129. https://doi.org/10.3390/app11073129
Chicago/Turabian StyleYan, Kun, Shiyou Wu, and Guangyou Fang. 2021. "Detection of Quasi-Static Trapped Human Being Using Mono-Static UWB Life-Detection Radar" Applied Sciences 11, no. 7: 3129. https://doi.org/10.3390/app11073129
APA StyleYan, K., Wu, S., & Fang, G. (2021). Detection of Quasi-Static Trapped Human Being Using Mono-Static UWB Life-Detection Radar. Applied Sciences, 11(7), 3129. https://doi.org/10.3390/app11073129