1. Introduction
Base Isolation is a technique that has been successful in mitigating vibrations in the dynamic system [
1,
2]. For building structures, it is commonly introduced at the foundation level which isolates the superstructure from earthquake accelerations that can be destructive to the structure [
3,
4]. Through base isolation, the superstructure is decoupled from the vibrations and the frequency of the dynamic system is thus modified [
5,
6]. Base isolators working on conventional principles are prone to vulnerabilities to far-fault and near-fault earthquakes [
7,
8]. Earthquakes from far faults feature low-frequency range vibrations that can induce resonance and amplify the response of the structure [
9,
10]. Near-fault earthquakes have vibration characteristics of a high amplitude and long-period velocity pulse resulting in failure of the base isolator itself [
11,
12,
13]. Further, the seismic isolators working on conventional principles have been ineffective for near-fault earthquakes, as they cause the structure to operate in its inelastic range for even design level earthquakes [
1,
2]. When a structure goes in the inelastic range, several fatigue-related issues [
14,
15] have to be considered, which makes the problem of vibration control even more challenging. Then, the passive nature of base isolators working on conventional principles limits the effective operation of the devices to only the predicted earthquakes and renders them ineffective for unprecedented earthquakes in the area [
16,
17]. Efforts have been made to overcome the problems associated with conventional vibration control techniques [
18,
19]. Active base isolation systems are designed by introducing active control strategies in tandem with passive base isolation [
20]. These work by external energy supplied to the system that imparts forces to structure [
21].
So far, numerous active control mechanisms and strategies have been adopted by researchers and structural engineers. Consequently, several active base control systems have been proposed and studied [
22,
23]. Reinhorn et al. [
24] studied the shape control of structures undergoing inelastic deformations by employing an active pulse/force system. Kelly et al. [
22] proposed the application of robust control in tandem with base isolation to minimize the total structural displacement and velocity. The control forces are designed in a way to overcome the forces generated by the isolation system at the base of the structure. Yoshida et al. [
25] investigated the application of LQG and H∞ control strategies with hybrid base isolation systems by computer simulations. Additionally, several efforts have been made in parallel to verify the effectiveness of active base isolation systems in minimizing the structural response [
23,
26]. Despite a great number of efforts on analytical and experimental research, numerous full-scale structures have still been equipped with active control systems, and the implementation of base isolation with active control around the world has not been adopted yet. The primary reasons for this are the lack of real-time controllable isolation devices, high budget requirements for both implementation and maintenance, the requirement of high external power, system reliability and robustness, and lack of acceptance of non-conventional technology [
21]. High power requirements of the actuators being a major challenge necessitated alternative approaches, which led to the developing of semi-active base isolation systems in which supplementary semi-active energy dissipation or displacement control devices are introduced [
21]. These devices are adaptable and have low power requirements.
Magnetorheological fluid (MRF) dampers have also been explored for base isolation [
3,
27,
28]. MRFs are smart materials whose rheological properties can be controlled by changing the applied external magnetic field [
29]. MR materials comprise of micro-sized iron particles dispersed in non-magnetic elastic matrix. When a magnetic field is applied, the rheological properties of these materials can be rapidly and reversibly changed [
30]. These have quick responsiveness to the magnetic field, rapid reversibility, and controllable performance which make these an excellent choice for use in applications in which controlled energy dissipation is needed, e.g., brakes and clutches for exercise equipment [
31] and controllable dampers for vehicle suspensions [
32]. A controllable fluid damper developed with MRFs is a popular device with semi-active control. These dampers have attracted considerable attention and interest from researchers. The greatest strength of MRF dampers is their assembly with a considerably simple and thus reliable design. It does not contain any moving parts other than the piston [
21].
It can be noted that all the “smart” base isolation strategies achieve a certain level of “smartness” by making use of additional variable damping through active or semi-active dampers to conventional base isolation, often known as hybrid base isolation. This supplementary damping has been studied by Kelly [
33] in more detail who concluded with adequate satisfaction that the use of supplementary dampers in base isolation is a misplaced effort and is a source of undesirable problems. The damping primarily controls vibration responses under the circumstances of steady-state resonance and a free vibration stage [
34]. Nevertheless, while operating under the impact load, which is particularly featured in near-fault earthquakes, the availability of ample time becomes a bottleneck for damping to dissipate vibrational energy. Additionally, although the supplementary damping may forcefully confine the base displacement of the passive base isolation system [
35], the high-frequency accelerations as well as an increase in inter-storey drifts may be introduced to the superstructure by augmenting damping [
36]. Further, the MRF-based dampers have their inherent disadvantages such as long-term particle deposition and environmental contamination, etc. [
37].
In order to achieve an ideal performance of base isolation while avoiding the issues associated with additional dampers, the seismic isolator itself should be adaptable. To achieve this, magnetorheological elastomers (MREs) have been studied by researchers for use in base isolators [
38,
39,
40]. MREs are controllable composites that are mainly composed of magnetic fillers (commonly iron particles) and elastomers as the dispersion matrix [
41]. The efficiency of MREs has been thoroughly studied by varying different material parameters, such as matrix material [
42,
43,
44], size [
39,
45,
46,
47], percentage content [
42,
48,
49,
50], type and shape of filler material, and operation mode of the MRE material [
39,
45]. Unlike MRFs, MREs exhibit stable magnetorheological performance because the particles do not undergo sedimentation with time,. Moreover, the thermal stability of MREs is also superior as compared to MRFs. Other advantages of MREs are quick response time (less than milliseconds [
51]) and having magnetic field-dependent yield stress.
Due to the magnetic field-dependent properties of MREs, they have various applications in different fields of engineering [
41]. In civil engineering structures, MREs have been used primarily in the development of adaptive seismic isolators [
39,
52]. Studies have been conducted to investigate the suitability of MRE-based isolation systems [
39,
53] which validated that MR elastomer base isolation outperforms the traditional passive system in terms of response improvement during earthquake excitations. Jung et al. [
40] developed a single-degree-of-freedom scaled-down structure model above an MR elastomer and performed experimental testing on the system under harmonic excitation and earthquake time histories. Behrooz et al. [
54] developed a variable stiffness and damping isolator (VSDI) for base isolation of a civil structure. Four MRE samples, each 12 mm thick and trapezoidal were proposed in the design with a shim dividing them. Four electromagnetic coils were provided on the top and bottom of MRE samples to generate the magnetic flux. The coils were covered with two steel caps along with steel cores. The overall dimensions of VSDI are 128 mm × 64 mm × 110 mm. The number of turns in a single-coil is 800, and the power required for each device is 234.2W at a 4 A current. A maximum stiffness increase of 57% was reported in shear mode. However, the main drawback of this design of the isolator for civil structures is the limited loading capacity in the vertical direction. Li et al. [
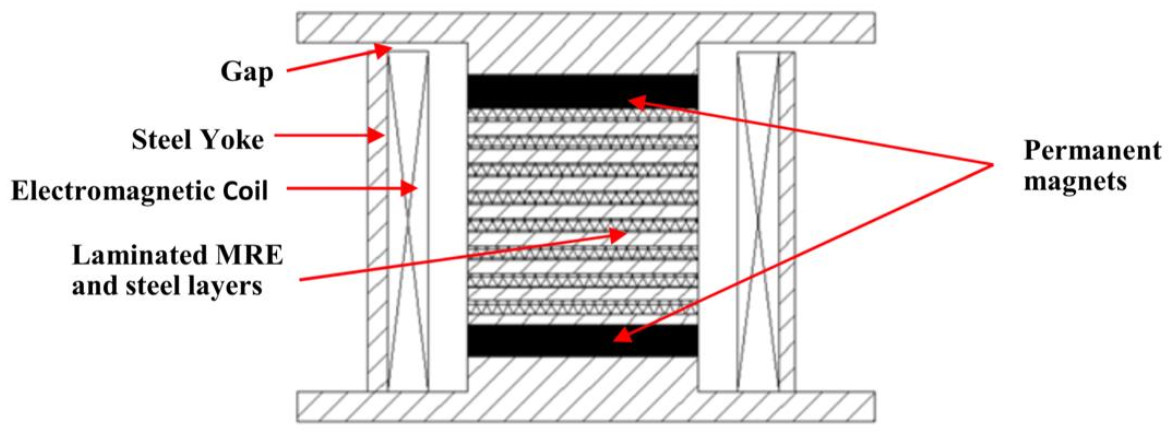
55,
56] put forward, for the first time, a laminated MRE base isolator containing 47 sheets of MR elastomer each 2 mm thick with a diameter of 140 mm. Every MRE layer is accompanied by a 1-mm-thick steel sheet of the same diameter with a total of 46 steel sheets. This configuration makes the laminated structure 140 mm high. An electromagnetic coil was positioned outside the laminations. An enclosed magnetic path is formed with the steel plates at the top and bottom; the hollow steel yoke, the cylindrical steel block, and the laminated structure also form the core of the electromagnetic coil. The benefits of the laminated design are greater vertical loading capacity of the isolator and an improved magnetic conductivity of the structure and the widely practiced design of the MRE base isolator as shown in
Figure 1. This device can take a maximum load of 370 kg in compression for its weakest state, i.e., 0 magnetic flux, and at a maximum design displacement of 26 mm. An even greater vertical loading capacity is expected under the application of a magnetic field. This loading capacity furnishes the minimum requirements for its use in the seismic isolation of civil structures. Experimental tests on a shake table demonstrated an effective stiffness increase of 37% and of 45% of force under a designed maximum current of 5A. The uniform magnetic field of 0.3 T is estimated to energize all of the MR elastomer layers in the device. Furthermore, an MR elastomer of a highly adjustable nature with a laminated structure was developed and experimentally tested by Li et al. [
5] using a soft MRE. The device contains 25 sheets of MR elastomer, each 1 mm thick with diameters of 120 mm. The MR elastomer used in the new device can produce a force increase of 1479% and a stiffness increase of 1630% when the magnetic field varied from 0T to 0.44T. Yang et al. [
57] conducted a study on the design and experimental testing of a novel MRE-based isolator with a hybrid magnetic system. A negative stiffness change in the isolator has been reported due to the incorporated hybrid magnetic system. The stiffness of the isolator can be increased or decreased based on the direction of current in the proposed isolator design.
The current trend on studies of MRE-based seismic isolation is focused on the development of isolation devices, their mathematical models, and subsequent necessary improvements/modifications in them for their effective implementation in large civil structures. No explicit research for MRE base isolation, however, has been conducted to gauge its effectiveness for near-fault and far-fault earthquakes. Since its performance for near-fault and far-fault earthquakes is a major drawback for passive base isolation systems, it is pretty much indispensable to obtain a comparison of the structural responses for both the systems, i.e., passive base isolation and MRE-based seismic isolation and to gauge how much response improvement is possible by employing MRE base isolation techniques for the case of both near-fault and far-fault earthquakes.
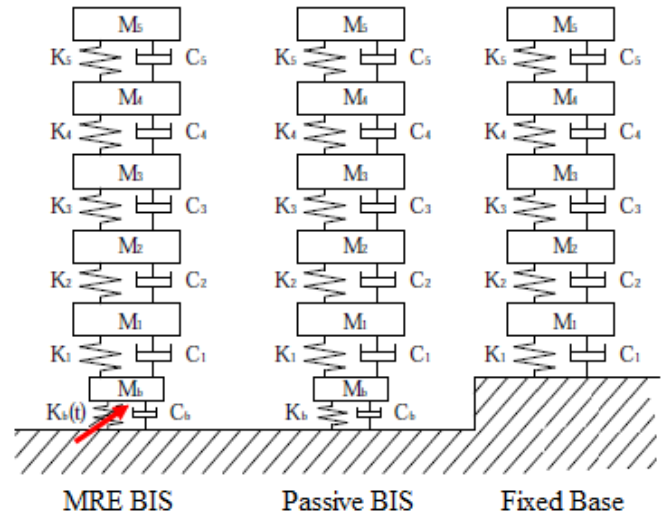
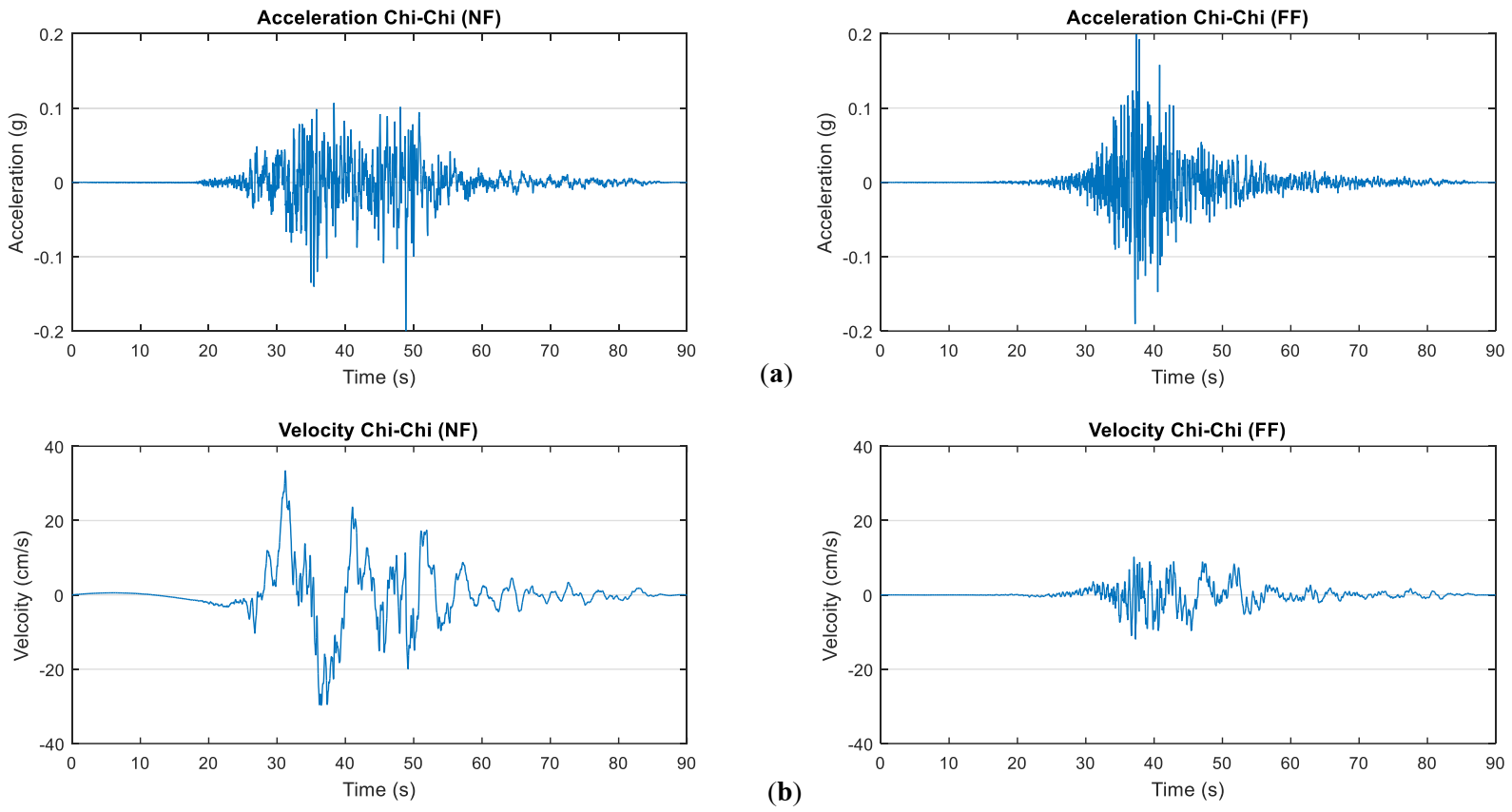
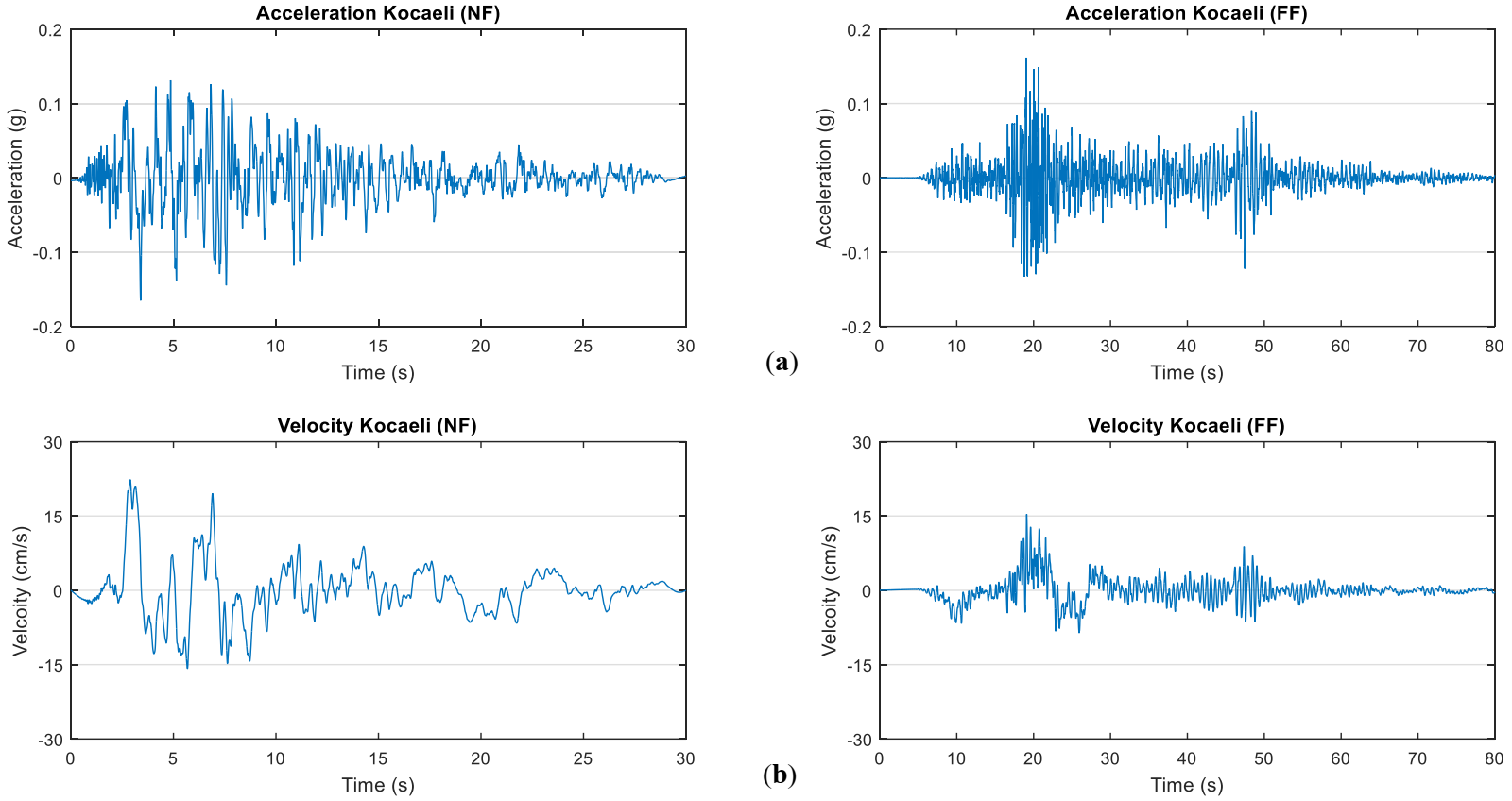
This study is focused on the investigation of the structural response of magnetorheological elastomers (MRE)-based multi-degree-of-freedom (MDOF) isolated structures under historic earthquake loadings. The effectiveness of MRE base isolation has been analyzed for near- and far-fault earthquakes individually first, and a comparison has been drawn afterward. The study involves identifying the historical near-fault and far-fault earthquakes, applying the selected earthquake loadings to the fixed base and passively isolated buildings, selecting and implementing suitable control strategy on passive isolator for varying its stiffness in real-time to simulate MRE-based smart isolation, and simulating the building models for selected earthquake loadings using closed-loop feedback control and obtain the responses. Consequently, a total of 612 responses from the three structures with 1x5 and 2x6 degrees-of-freedom (DOFs) have been analyzed for six earthquake time histories for each structure and a comparison has been made at the end.



 ,
, 


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}