
Analysis and Optimization of Driveline Bushing for Lateral Ride Vibration under Shock Excitation


Abstract
1. Introduction
2. Model
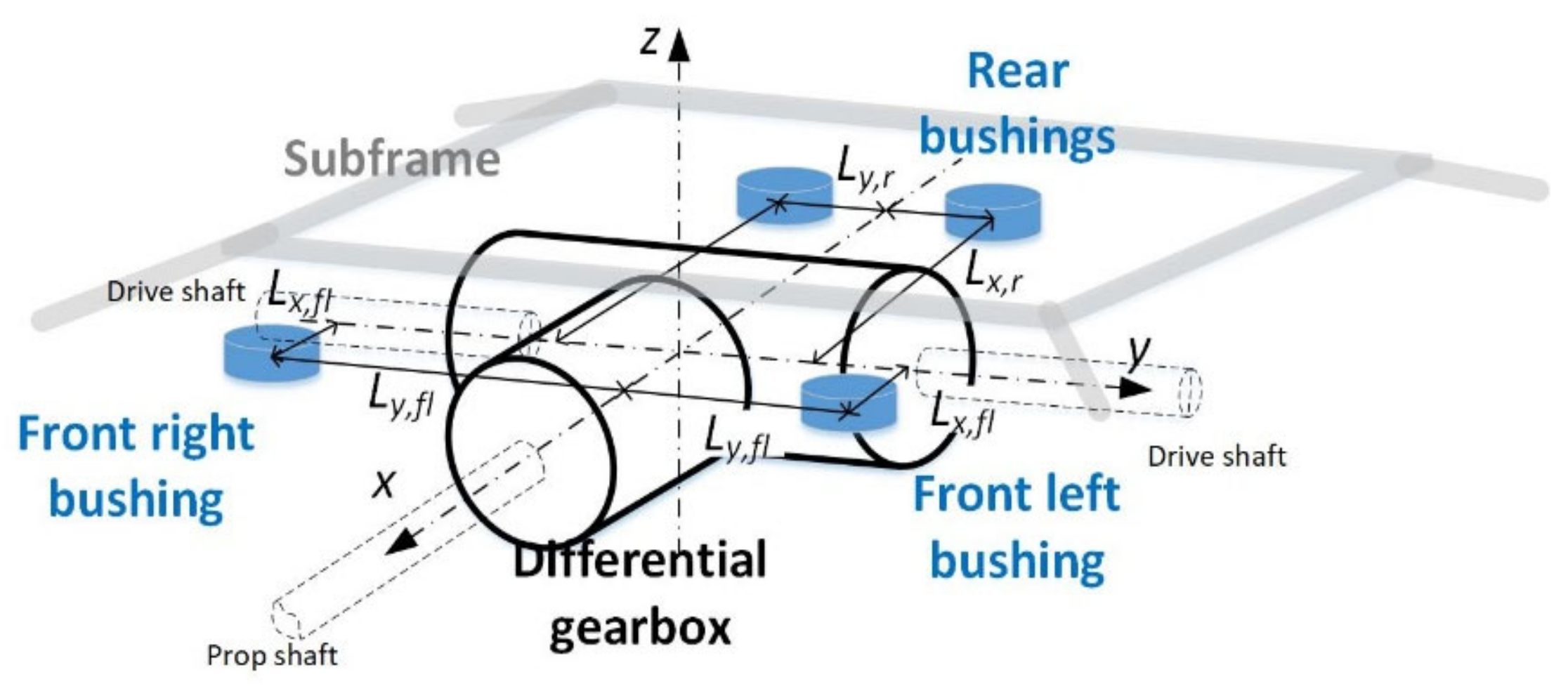
2.1. Model Construction
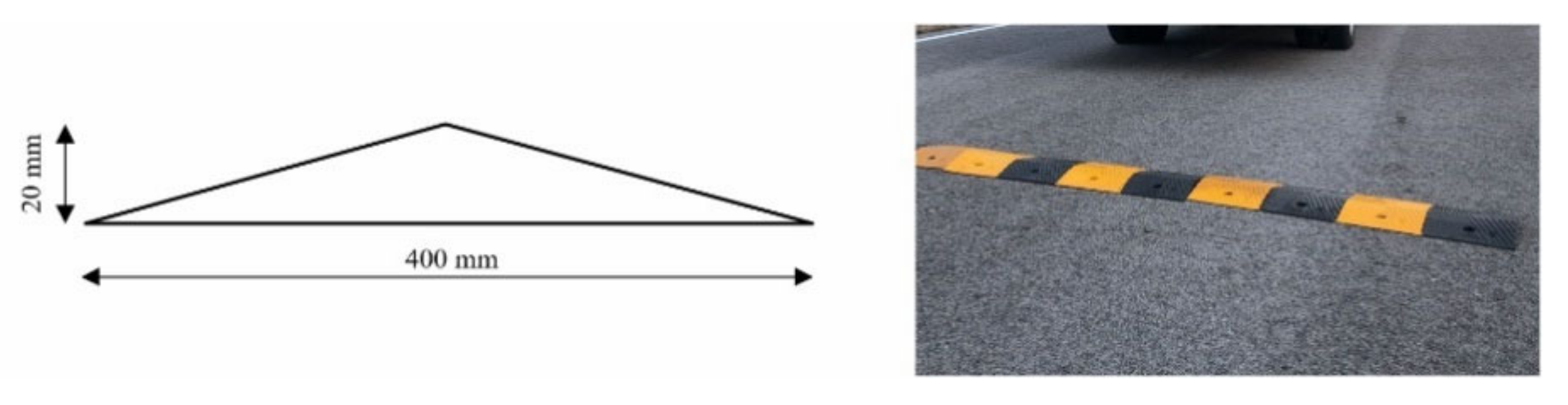
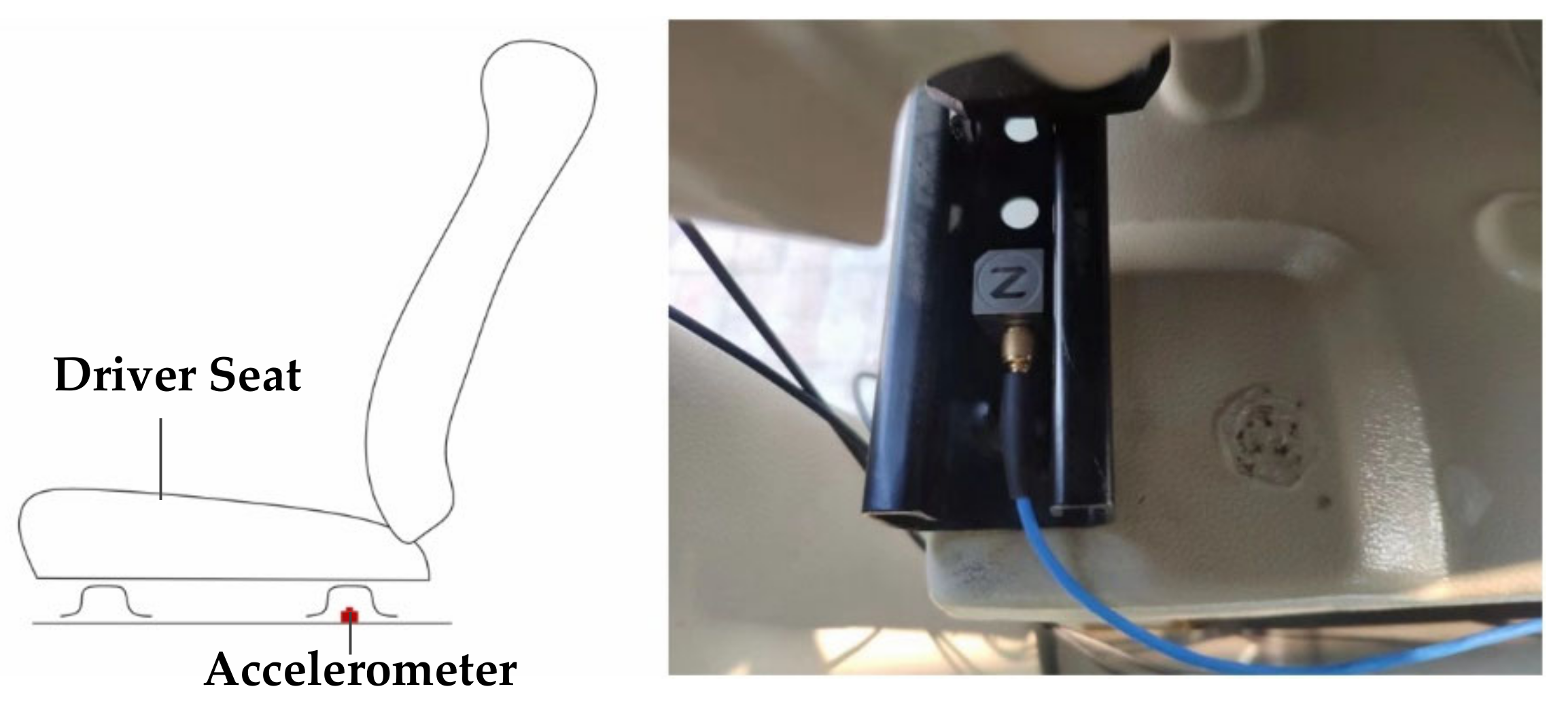
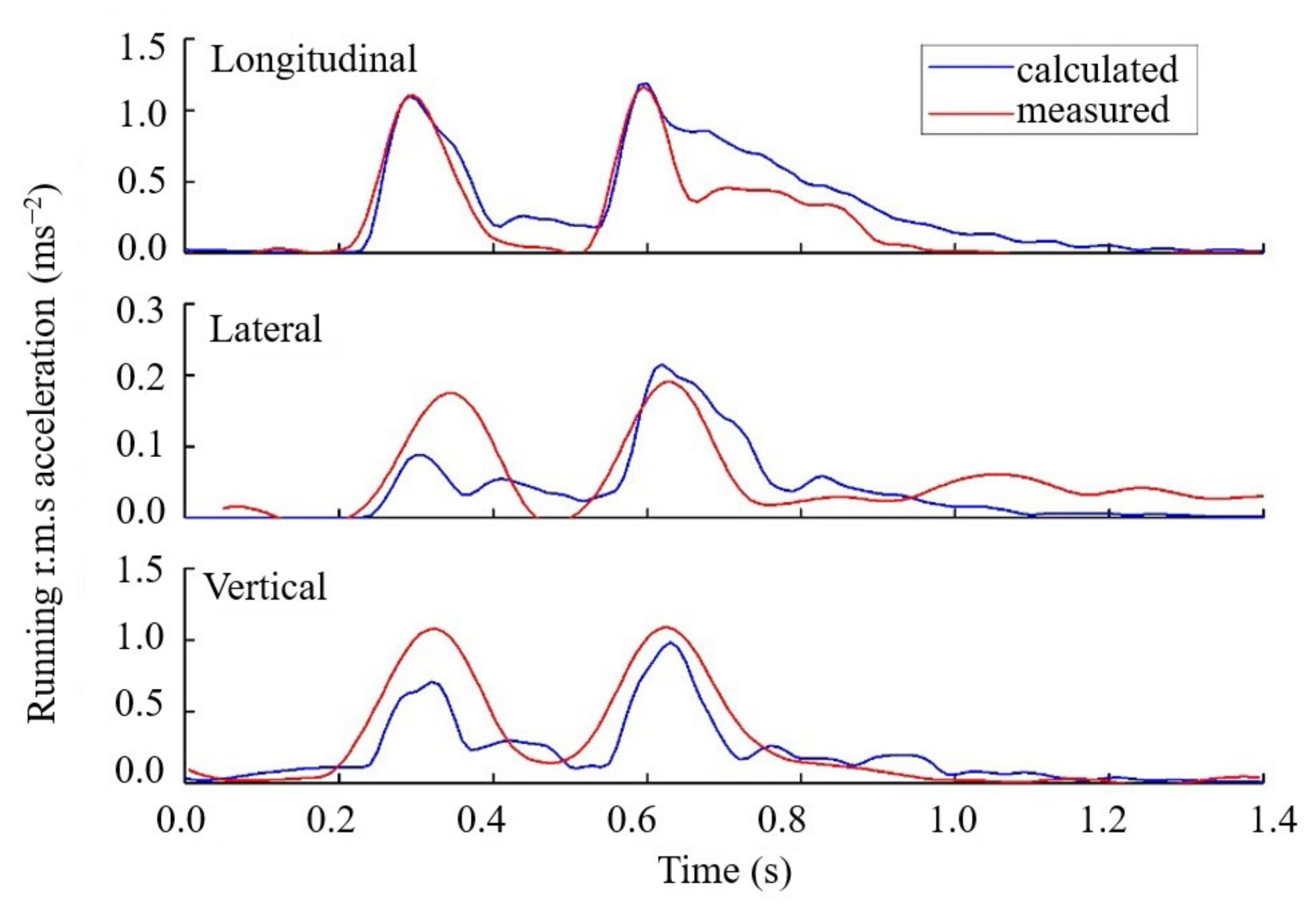
2.2. Model Validation
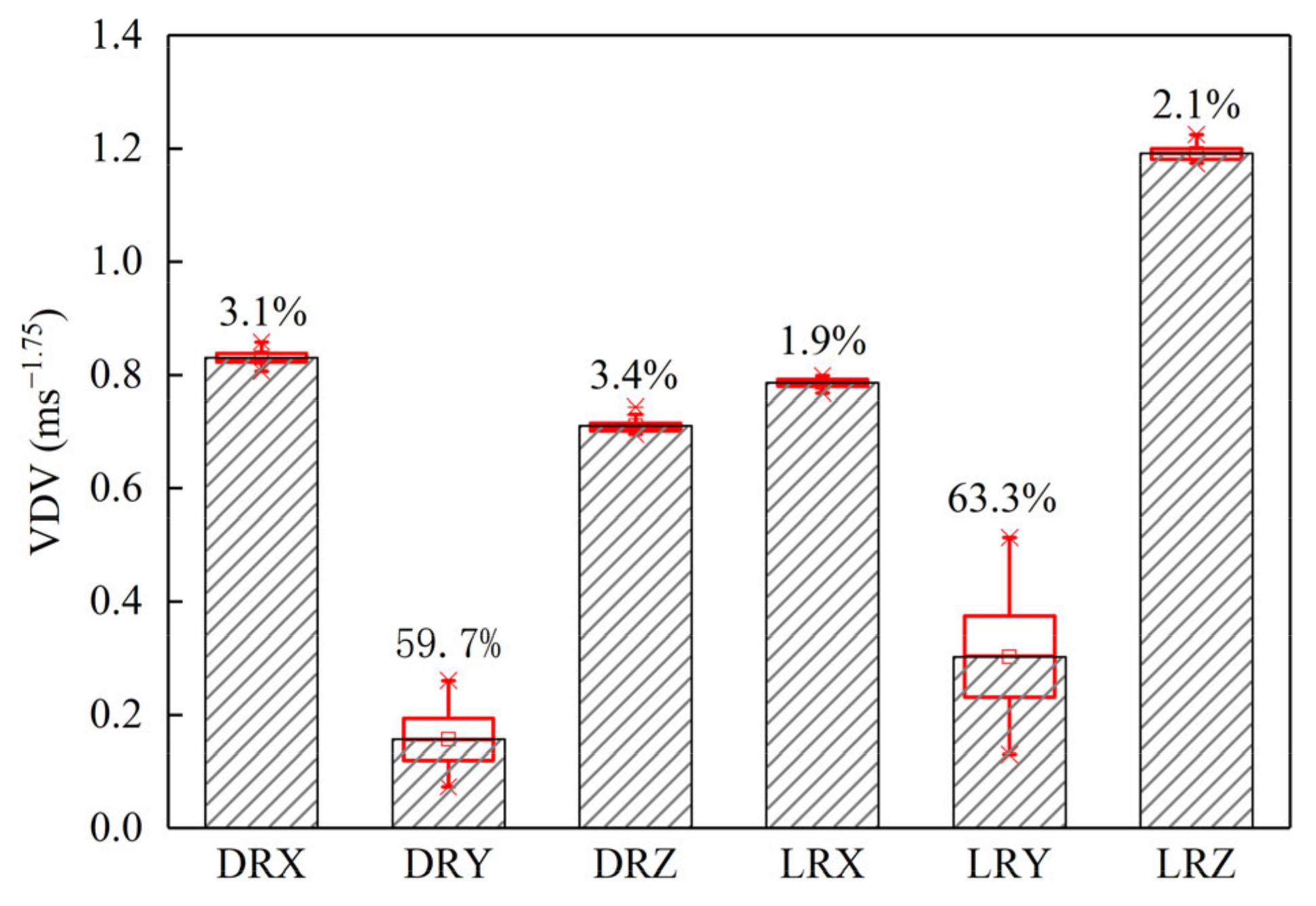
3. Sensitivity Analysis
3.1. Method
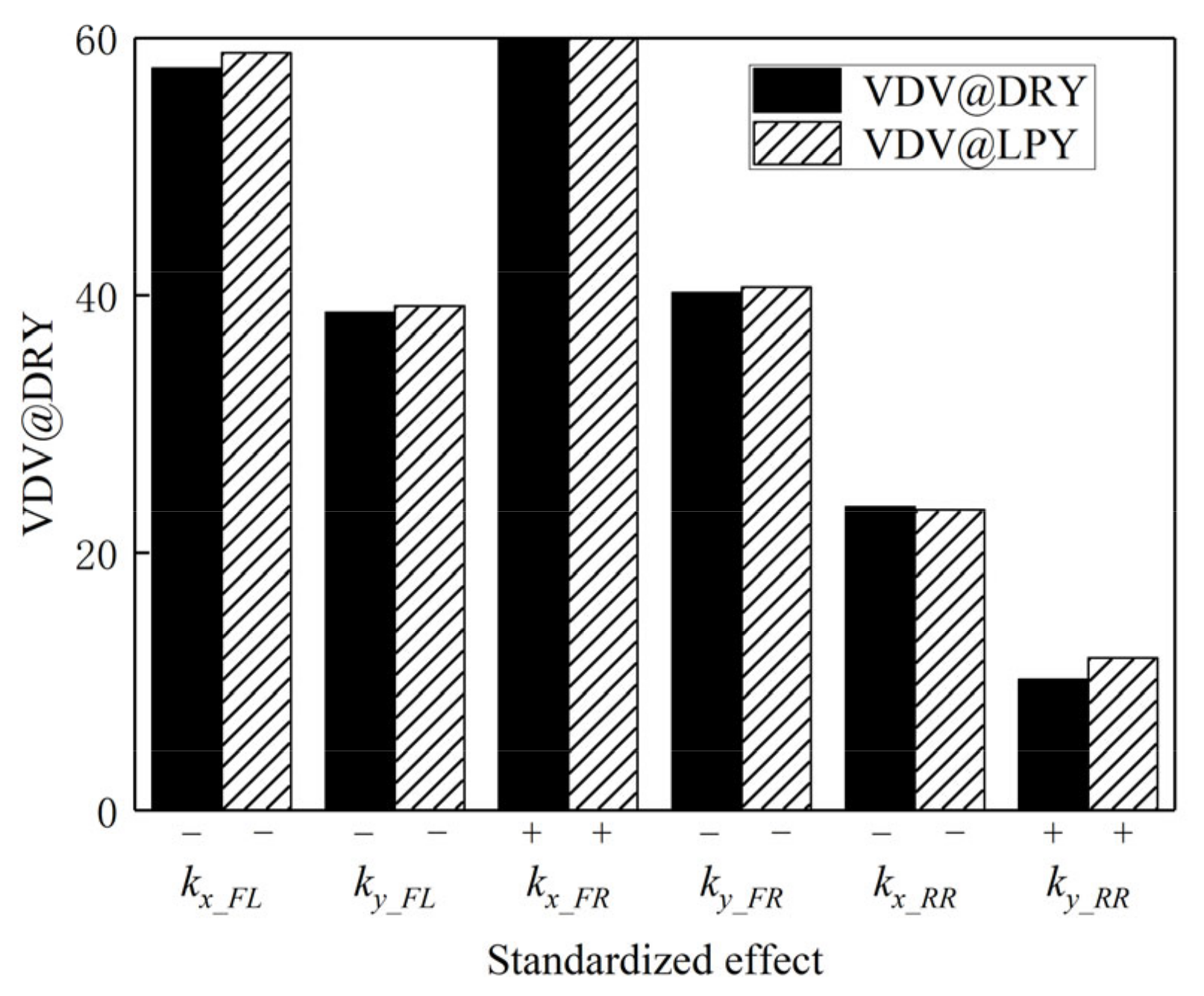
3.2. Sensitivity Results
4. Relationship between Seat Rail Vibration and Bushing Parameters
4.1. Design of Experiment
4.2. Response Function
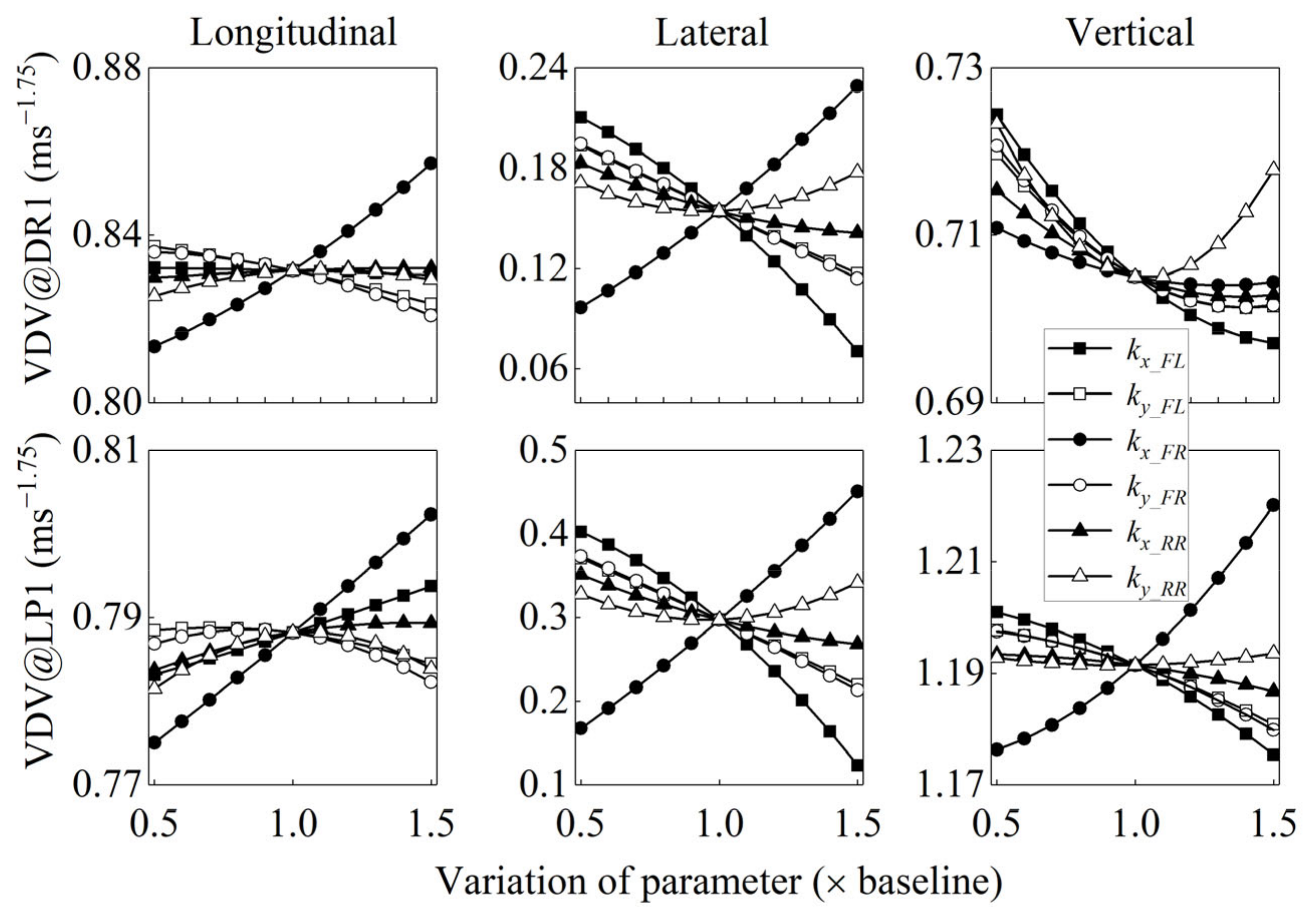
4.3. Effect of the Design Parameter on Seat Rail Vibration
5. Optimization of Rear Drive Unit Bushing Parameters
5.1. Optimization Algorithm
- Step 1: initialize the population positions and velocities of particles;
- Step 2: update the time, the inertia weight and the velocities;
- Step 3: update the positions based on the updated velocities;
- Step 4: update the individual best by evaluating each particle according to its updated position;
- Step 5: update the global best by searching for the minimum value among individual bests;
- Step 6: test if one of the stopping criteria is satisfied. If yes, then stop; if not, then go to step 2.
5.2. Bushing Optimization
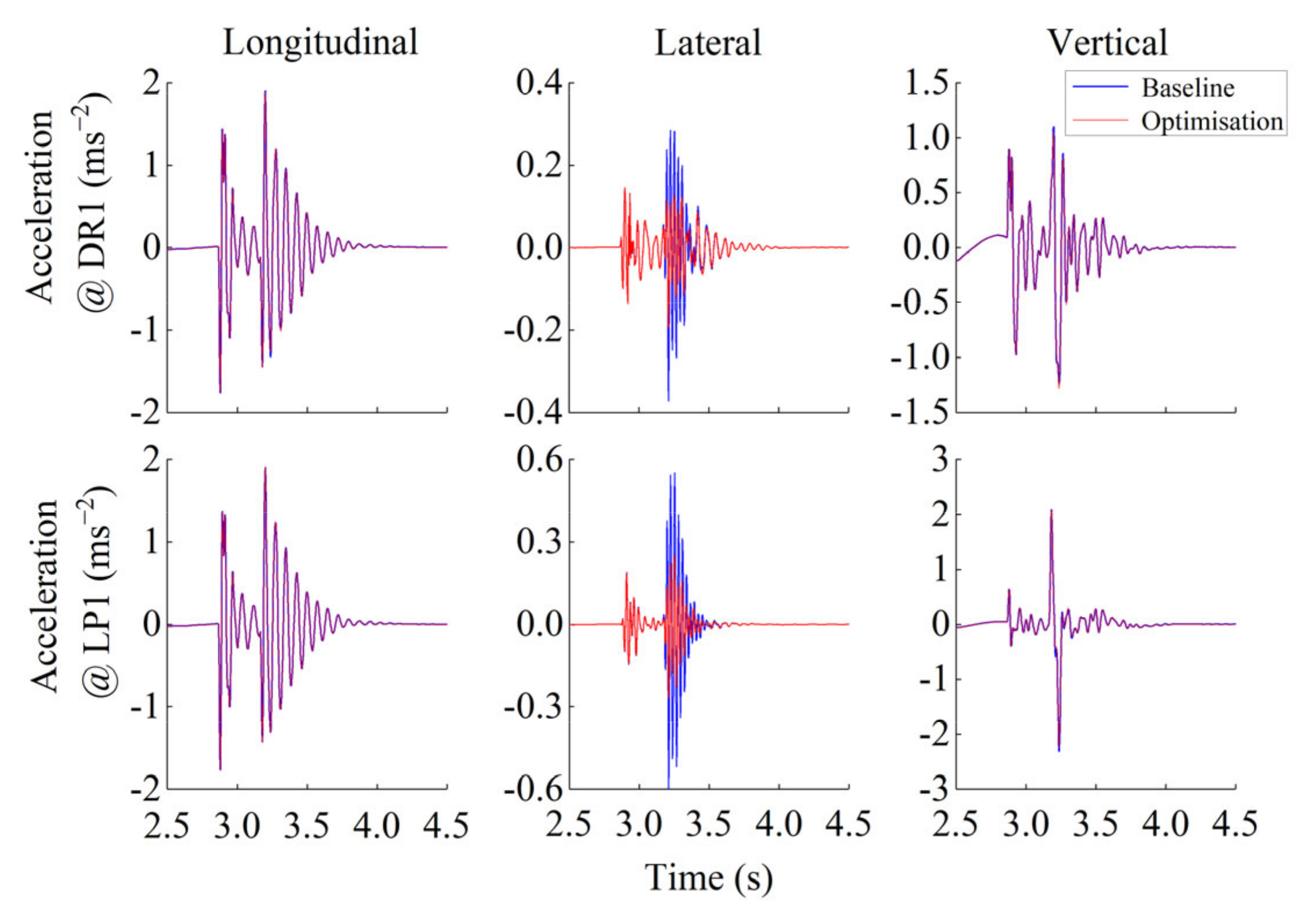
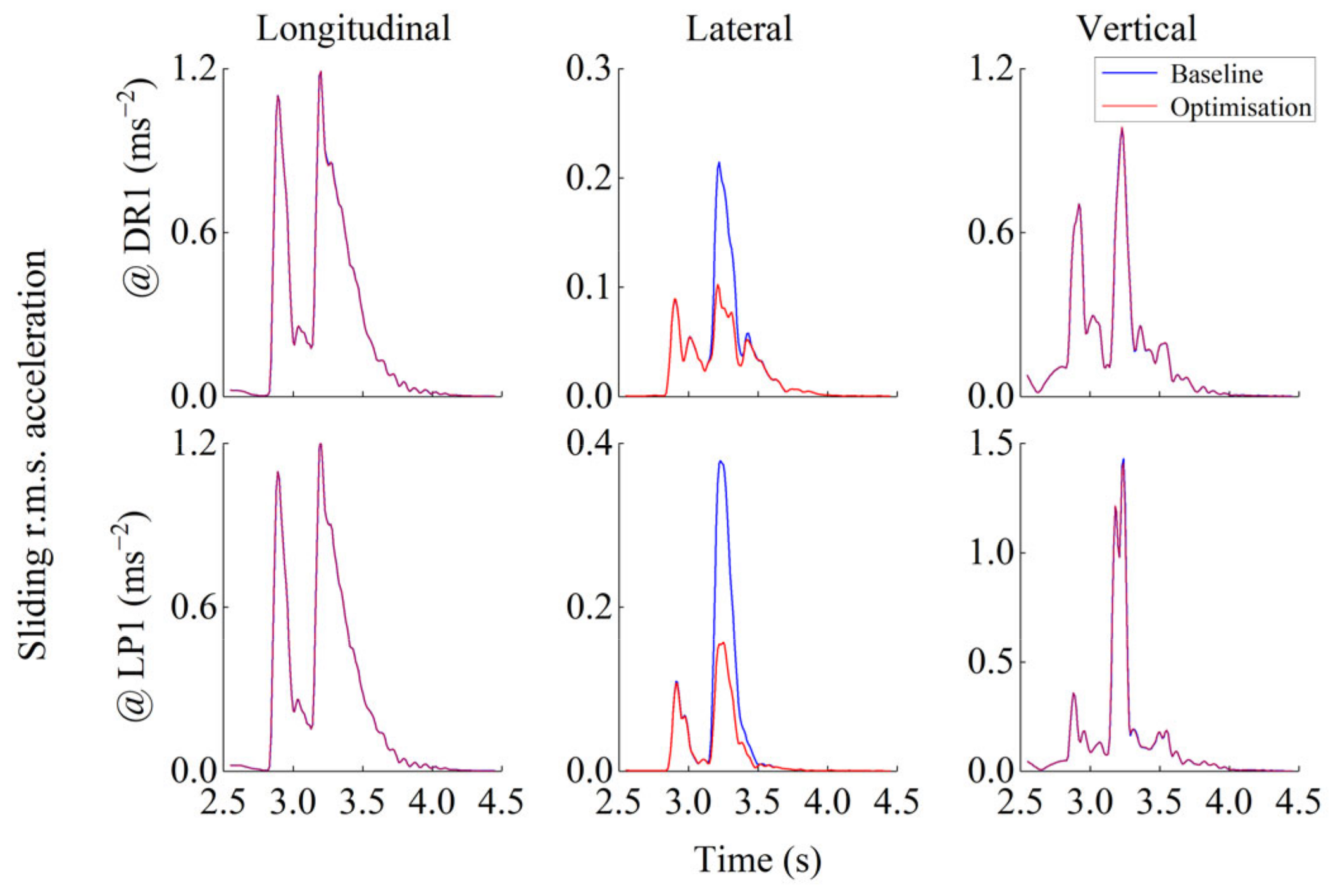
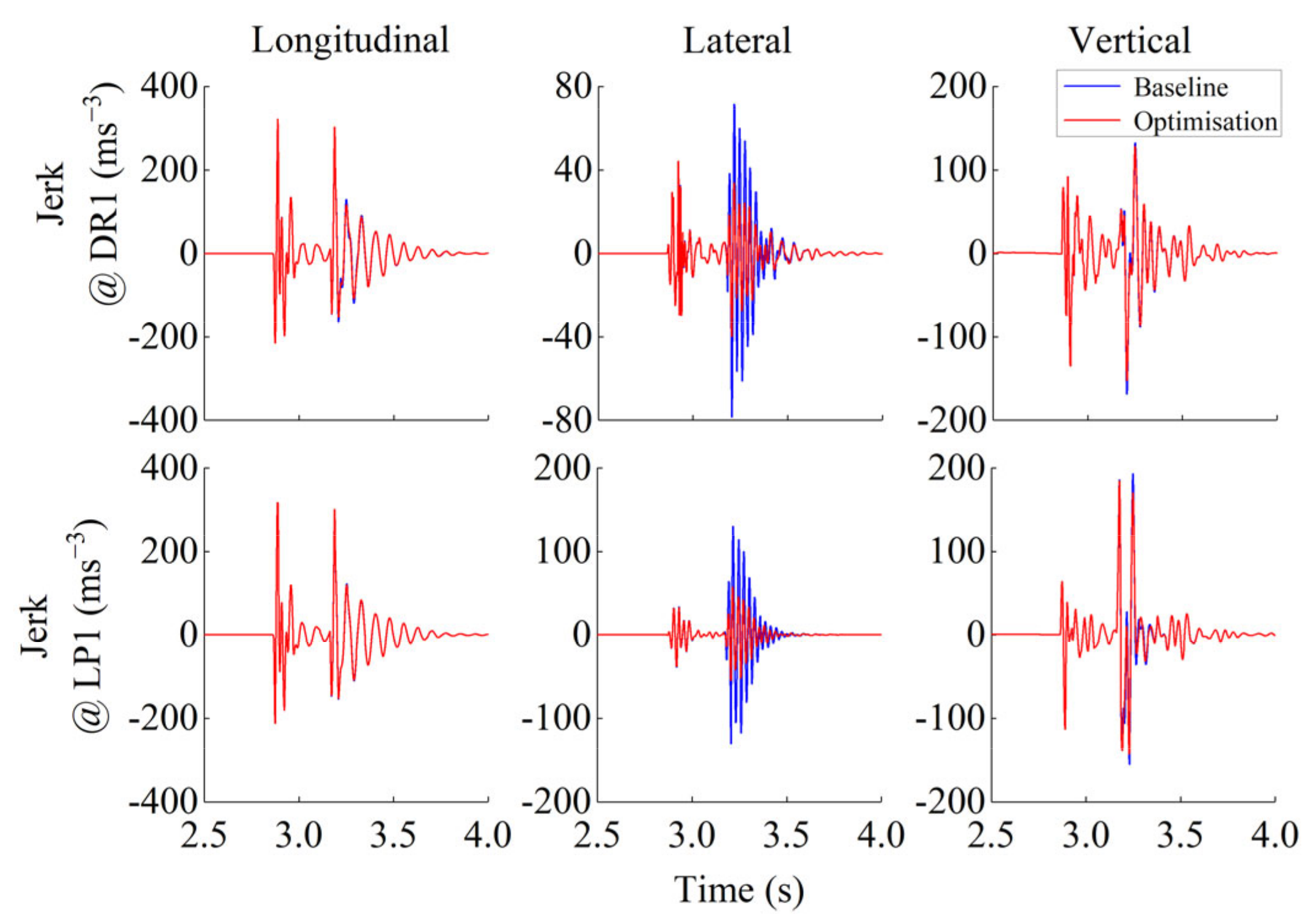
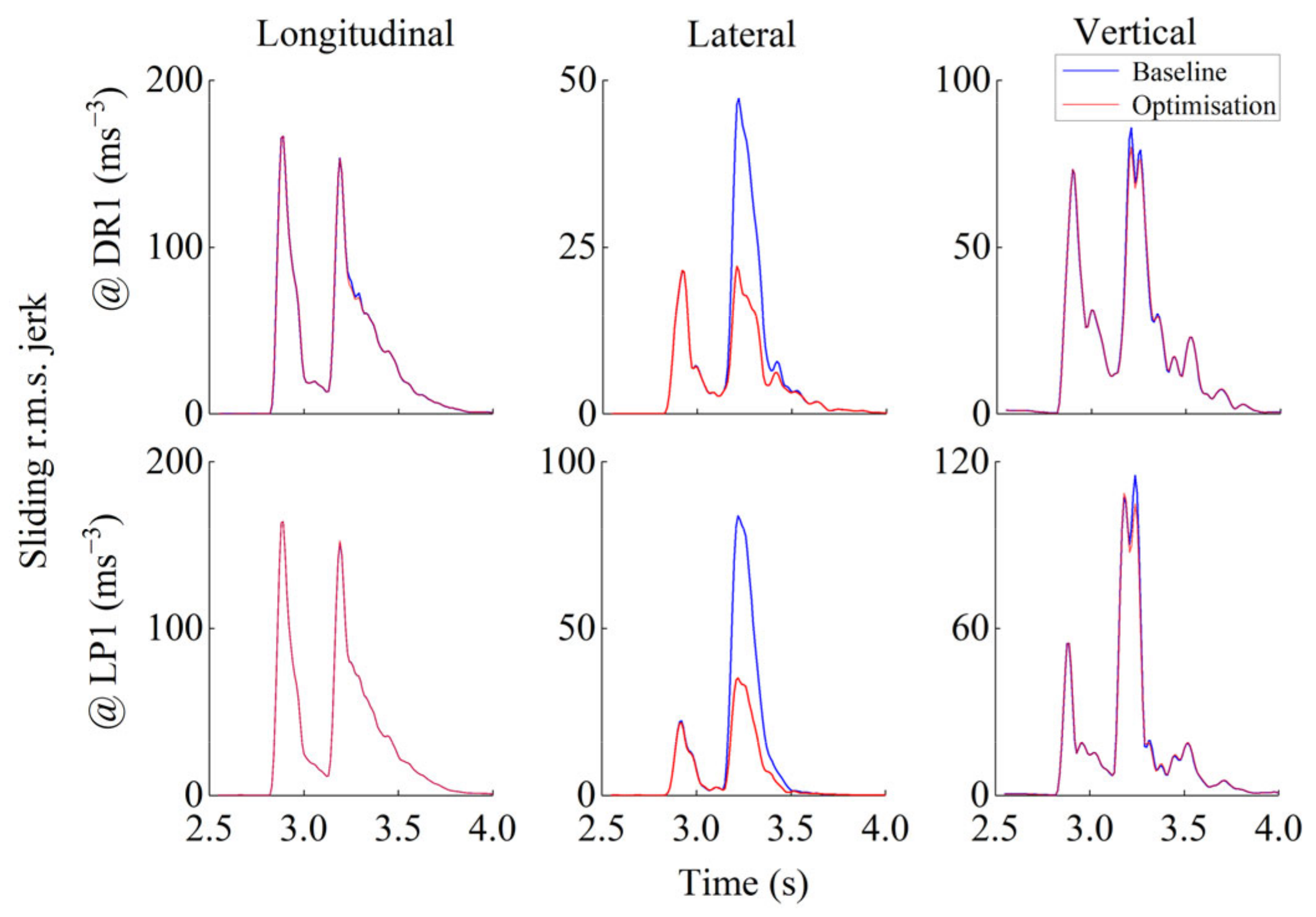
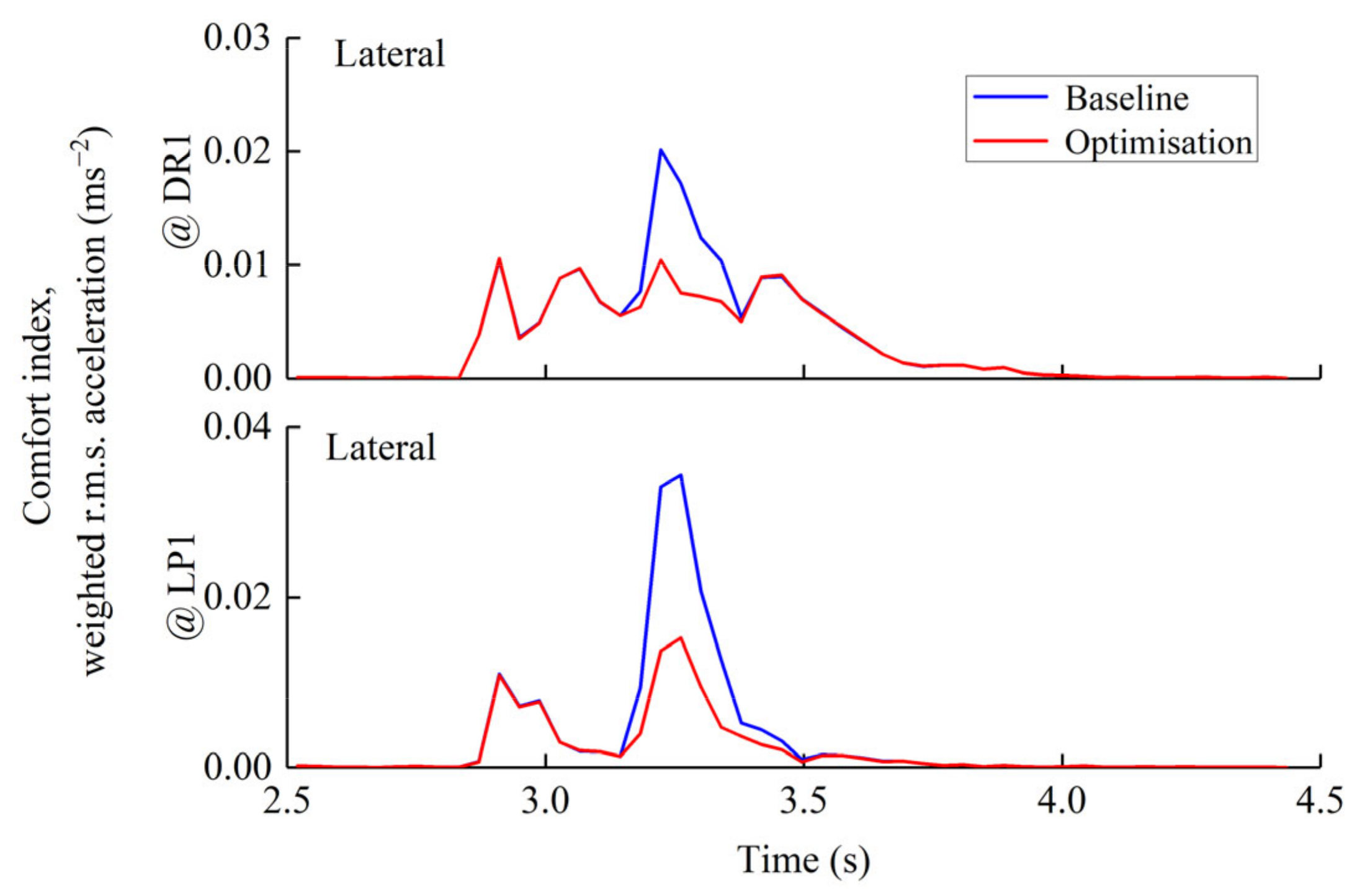
5.3. Optimized Ride Vibration
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zheng, X.; Hao, Z.; Wang, X.; Mao, J. A full-spectrum analysis of high-speed train interior noise under multi-physical-field coupling excitations. Mech. Syst. Signal Process. 2016, 75, 525–543. [Google Scholar] [CrossRef]
- Choi, B.C.; Cho, S.; Kim, C.-W. Sequential Approximate Optimization of MacPherson Strut Suspension for Minimizing Side Load by Using Progressive Meta-Model Method. Int. J. Automot. Technol. 2018, 19, 455–461. [Google Scholar] [CrossRef]
- Eskandary, P.K.; Khajepour, A.; Wong, A.; Ansari, M. Analysis and optimization of air suspension system with independent height and stiffness tuning. Int. J. Automot. Technol. 2016, 17, 807–816. [Google Scholar] [CrossRef]
- Suh, K.; Yoon, H. Design Optimization of a Rear Independent Suspension for the Korean Light Tactical Vehicle. Int. J. Automot. Technol. 2018, 19, 245–252. [Google Scholar] [CrossRef]
- Lin, J.; Lin, Z.; Ma, L.; Xu, T.; Chen, D.; Zhang, J. Analysis and optimization of coupled vibration between substructures of a multi-axle vehicle. J. Vib. Control. 2019, 25, 1031–1043. [Google Scholar] [CrossRef]
- Zhang, J.; Guo, P.; Lin, J.; Wang, K. A mathematical model for coupled vibration system of road vehicle and coupling effect analysis. Appl. Math. Model. 2016, 40, 1199–1217. [Google Scholar] [CrossRef]
- Wang, Y.; Zhao, W.; Zhou, G.; Gao, Q.; Wang, C. Suspension mechanical performance and vehicle ride comfort applying a novel jounce bumper based on negative Poisson’s ratio structure. Adv. Eng. Softw. 2018, 122, 1–12. [Google Scholar] [CrossRef]
- Ambrósio, J.; Veríssimo, P. Sensitivity of a vehicle ride to the suspension bushing characteristics. J. Mech. Sci. Technol. 2009, 23, 1075–1082. [Google Scholar] [CrossRef]
- Papaioannou, G.; Koulocheris, D. An approach for minimizing the number of objective functions in the optimization of vehicle suspension systems. J. Sound Vib. 2018, 435, 149–169. [Google Scholar] [CrossRef]
- Moheyeldein, M.M.; Abd-El-Tawwab, A.M.; Abd El-Gwwad, K.A.; Salem, M. An analytical study of the performance indices of air spring suspensions over the passive suspension. Beni-Suef Univ. J. Basic Appl. Sci. 2018, 7, 525–534. [Google Scholar] [CrossRef]
- Sim, K.; Lee, H.; Yoon, J.W.; Choi, C.; Hwang, S.-H. Effectiveness evaluation of hydro-pneumatic and semi-active cab suspension for the improvement of ride comfort of agricultural tractors. J. Terramech. 2017, 69, 23–32. [Google Scholar] [CrossRef]
- Khameneifar, F.; Arzanpour, S.; Moallem, M. Piezo-actuated active decoupler hydraulic engine mount. In ASME International Mechanical Engineering Congress and Exposition; ASME: New York, NY, USA, 2010; pp. 195–200. [Google Scholar]
- Lee, D.H.; Hwang, W.S.; Kim, C.M. Design sensitivity analysis and optimization of an engine mount system using an FRF-based substructuring method. J. Sound Vib. 2002, 255, 383–397. [Google Scholar] [CrossRef]
- Shangguan, W.B.; Zhao, Y. Dynamic analysis and design calculation methods for powertrain mounting systems. Int. J. Automot. Technol. 2007, 8, 731–744. [Google Scholar]
- El Hafidi, A.; Martin, B.; Loredo, A.; Jego, E. Vibration reduction on city buses: Determination of optimal position of engine mounts. Mech. Syst. Signal Process. 2010, 24, 2198–2209. [Google Scholar] [CrossRef]
- Kaul, S.; Dhingra, A.K. Engine mount optimisation for vibration isolation in motorcycles. Veh. Syst. Dyn. 2009, 47, 419–436. [Google Scholar] [CrossRef]
- Kalsule, D.; Hudson, D.; Yeola, Y.; Bohari, J. Structure Borne Noise and Vibration Reduction of a Sports Utility Vehicle by Body-Mount Dynamic Stiffness Optimization. SAE Tech. Pap. Ser. 2011. [Google Scholar] [CrossRef]
- Xu, P.; Bernardo, B.; Tan, K. Optimal mounting design for cab vibration isolation. Int. J. Veh. Des. 2011, 57, 292–304. [Google Scholar] [CrossRef]
- Ramachandran, T.; Padmanaban, K.P. Minimization of IC engine rubber mount displacement using genetic algorithm. Int. J. Adv. Manuf. Technol. 2013, 67, 887–898. [Google Scholar] [CrossRef]
- Shital, P.; Ghosh, C.; Talwar, H.; Gosain, A.; Dayal, P.S. A Study of Engine Mount Optimisation of Three-Cylinder Engine through Multi-Body Dynamic Simulation and Its Verification by Vehicle Measurement. SAE Tech. Pap. Ser. 2015. [Google Scholar] [CrossRef]
- Ooi, L.-E.; Ripin, Z.M. Optimization of an engine mounting system with consideration of frequency-dependent stiffness and loss factor. J. Vib. Control. 2016, 22, 2406–2419. [Google Scholar] [CrossRef]
- Zhang, B.; Zhan, H.; Gu, Y. A general approach to tune the vibration properties of the mounting system in the high-speed and heavy-duty engine. J. Vib. Control. 2016, 22, 247–257. [Google Scholar] [CrossRef]
- Lin, J.; Qiu, Y. Sensitivity analysis of a lightweight rear differential unit on ride comfort of a sport utility vehicle. In Proceedings of the 50th UK Conference on Human Response to Vibration, Southampton, UK, 9–10 September 2015; pp. 187–198. [Google Scholar]
- Lin, J.; Qiu, Y. Mathematical Modelling of the Rear Drive Unit of a Lightweight Vehicle for Sensitivity Analysis of Vibration. In Proceedings of the ASME 2016 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Charlotte, NC, USA, 21–24 August 2016; p. V003T001A017. [Google Scholar]
- Zhang, X.; Zhang, Q.; Li, Y.; Liu, C.; Qiu, Y. Effect of the thickness of polyurethane foams at the seat pan and the backrest on fore-and-aft in-line and vertical cross-axis seat transmissibility when sitting with various contact conditions of backrest during fore-and-aft vibration. Appl. Ergon. 2021, 93, 103354. [Google Scholar] [CrossRef] [PubMed]
- Liu, C.; Qiu, Y. Nonlinearity in the localised apparent masses of the seated human body exposed to vertical vibration. Mech. Syst. Signal Process. 2020, 135, 106394. [Google Scholar] [CrossRef]
- Lin, Z.; Zhang, J.; Li, J.; Yin, W.; Liu, C.; Lin, J. Biodynamic Response of Seated Human Body to Roll Vibration and Correlation between Roll and Lateral Directions. Shock. Vib. 2020, 2020, 1–12. [Google Scholar] [CrossRef]
- Zhou, Z.; Griffin, M.J. Response of the seated human body to whole-body vertical vibration: Discomfort caused by mechanical shocks. Ergonomics 2017, 60, 347–357. [Google Scholar] [CrossRef] [PubMed][Green Version]
- Huang, Y.; Zhang, P. Subjective discomfort caused by vertical whole-body vibration in the frequency range 2–100 Hz. Ergonomics 2019, 62, 420–430. [Google Scholar] [CrossRef] [PubMed]
- Beard, G.F.; Griffin, M.J. Discomfort caused by low-frequency lateral oscillation, roll oscillation and roll-compensated lateral oscillation. Ergonomics 2013, 56, 103–114. [Google Scholar] [CrossRef][Green Version]
- ISO. Mechanical Vibration and Shock: Evaluation of Human Exposure to Whole-body Vibration. Part 1, General Requirements; ISO: Geneva, Switzerland, 1997. [Google Scholar]
- Myers, R.H.; Montgomery, D.C.; Anderson-Cook, C.M. Response Surface Methodology: Process and Product Optimization Using Designed Experiments; John Wiley & Sons: Hoboken, NJ, USA, 2016. [Google Scholar]
- Zhang, H.; Kennedy, D.D.; Rangaiah, G.P.; Bonilla-Petriciolet, A. Novel bare-bones particle swarm optimization and its performance for modeling vapor–liquid equilibrium data. Fluid Phase Equilibria 2011, 301, 33–45. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bushing | Geometry | Properties | |||||
|---|---|---|---|---|---|---|---|
| Dynamic Rate (×105 N/m) | Loss Angle (Degree) | ||||||
| x | y | z | x | y | z | ||
| Left-Front | Φ 0.08 m × 0.05 m | 8.0 | 4.5 | 15 | 5 | 5 | 5 |
| Right-Front | Φ 0.08 m × 0.05 m | 18 | 4.6 | 20 | 5 | 5 | 5 |
| Rear | Φ 0.04 m × 0.075 m | 2.4 | 20 | 8.0 | 5 | 5 | 5 |
| kx,FL | ky_FL | kx_FR | ky_FR | kx_RR | ky_RR | VDV (m/s−1.75) | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| MBD | RSM | |||||||||||
| x | y | z | x | y | z | |||||||
| 1 | 1.2 | 1.3 | 0.9 | 1.0 | 0.8 | 1.0 | 0.82 | 0.10 | 0.70 | 0.82 | 0.10 | 0.70 |
| 2 | 0.5 | 1.2 | 0.9 | 0.9 | 1.2 | 1.5 | 0.83 | 0.19 | 0.72 | 0.82 | 0.20 | 0.73 |
| 3 | 0.8 | 0.8 | 1.3 | 1.1 | 1.2 | 0.8 | 0.84 | 0.21 | 0.71 | 0.85 | 0.22 | 0.71 |
| 4 | 0.6 | 1.4 | 1.3 | 1.2 | 0.7 | 1.0 | 0.83 | 0.18 | 0.71 | 0.83 | 0.19 | 0.71 |
| 5 | 0.6 | 0.5 | 0.7 | 1.3 | 0.6 | 0.7 | 0.82 | 0.19 | 0.73 | 0.82 | 0.20 | 0.75 |
| VDV (m/s−1.75) | Direction | Baseline | Optimized |
|---|---|---|---|
| Driver | Fore-and-aft | 0.79 | 0.78 |
| Lateral | 0.13 | 0.07 | |
| Vertical | 0.55 | 0.55 | |
| Left passenger | Fore-and-aft | 0.79 | 0.79 |
| Lateral | 0.23 | 0.10 | |
| Vertical | 0.84 | 0.83 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, P.; Li, J.; Lin, Z.; Lin, J. Analysis and Optimization of Driveline Bushing for Lateral Ride Vibration under Shock Excitation. Appl. Sci. 2021, 11, 2647. https://doi.org/10.3390/app11062647
Guo P, Li J, Lin Z, Lin J. Analysis and Optimization of Driveline Bushing for Lateral Ride Vibration under Shock Excitation. Applied Sciences. 2021; 11(6):2647. https://doi.org/10.3390/app11062647
Chicago/Turabian StyleGuo, Peng, Jinlu Li, Zefeng Lin, and Jiewei Lin. 2021. "Analysis and Optimization of Driveline Bushing for Lateral Ride Vibration under Shock Excitation" Applied Sciences 11, no. 6: 2647. https://doi.org/10.3390/app11062647
APA StyleGuo, P., Li, J., Lin, Z., & Lin, J. (2021). Analysis and Optimization of Driveline Bushing for Lateral Ride Vibration under Shock Excitation. Applied Sciences, 11(6), 2647. https://doi.org/10.3390/app11062647