
Dynamic Segmentation for Physical Activity Recognition Using a Single Wearable Sensor


Abstract
Featured Application
Abstract
1. Introduction
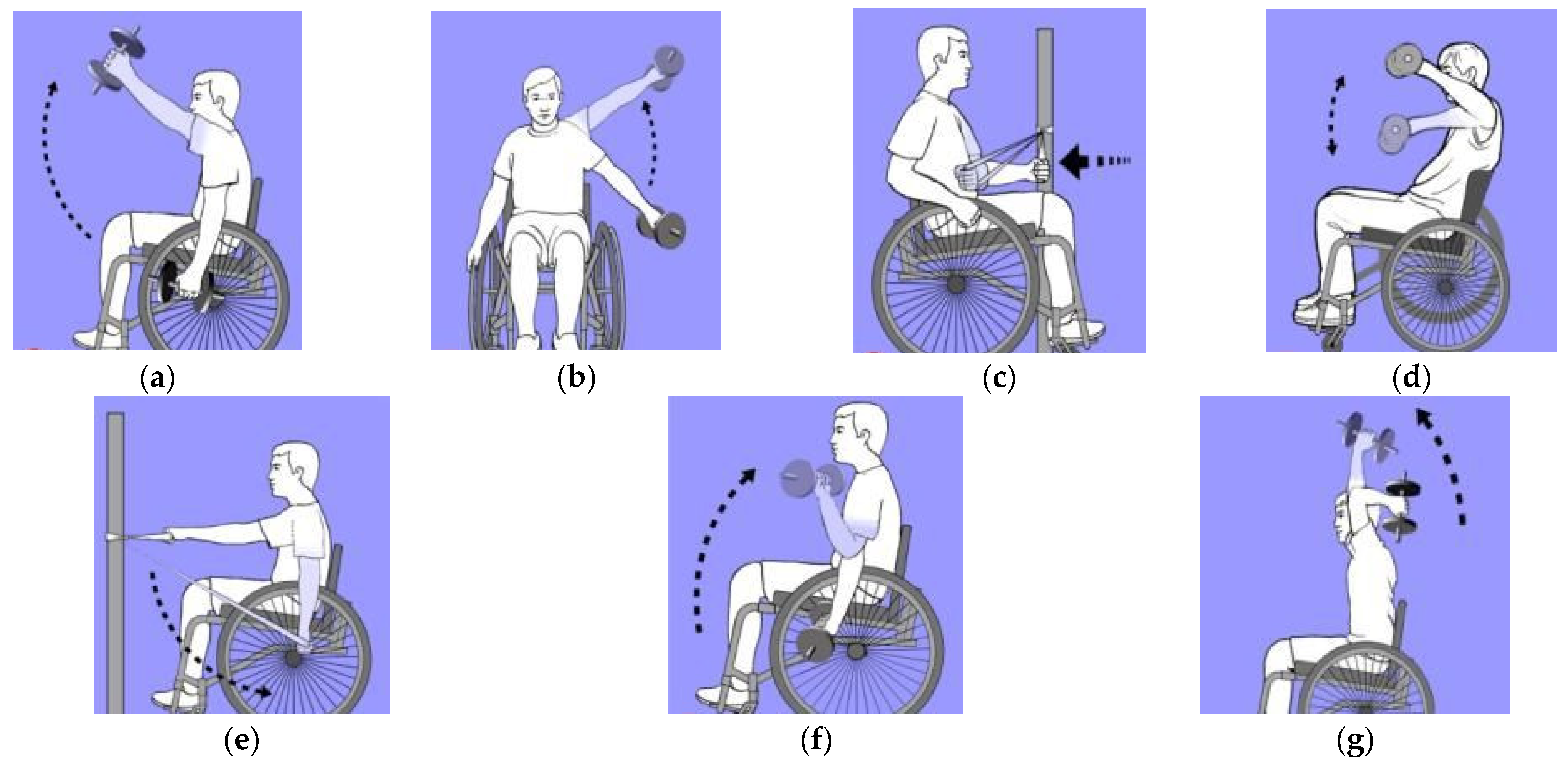
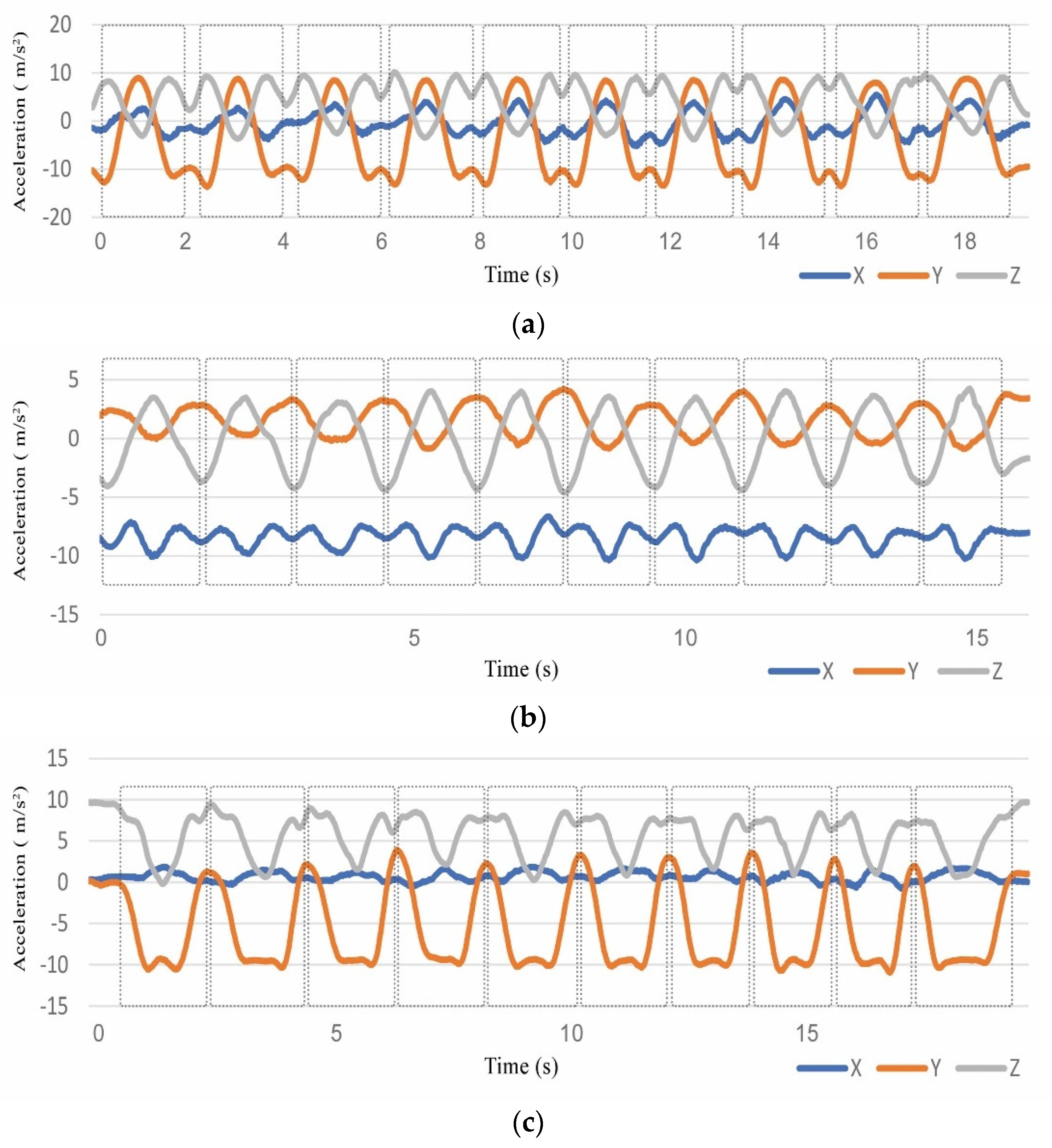
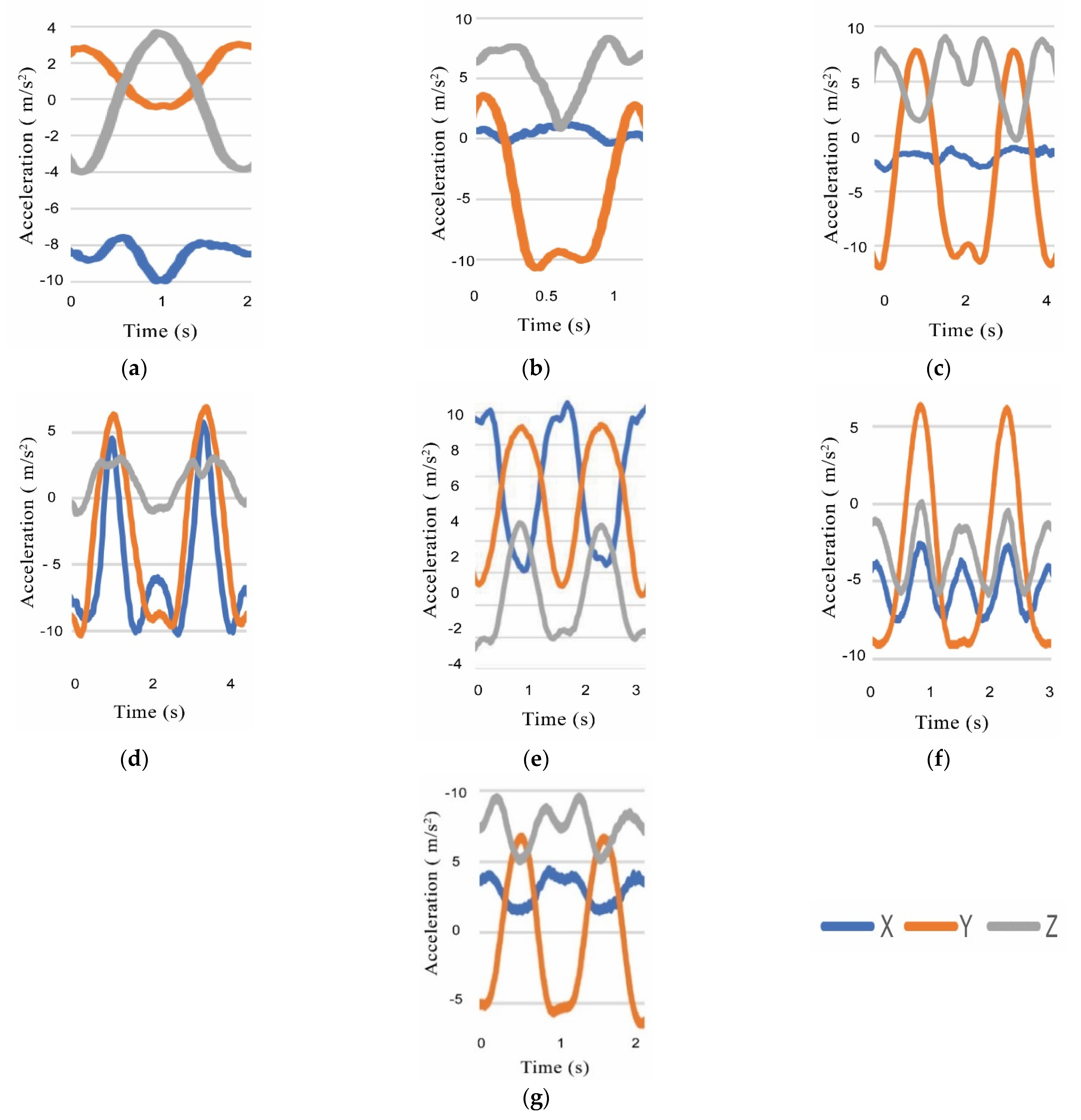
2. Physical Activity
3. System Overview
4. Proposed Method
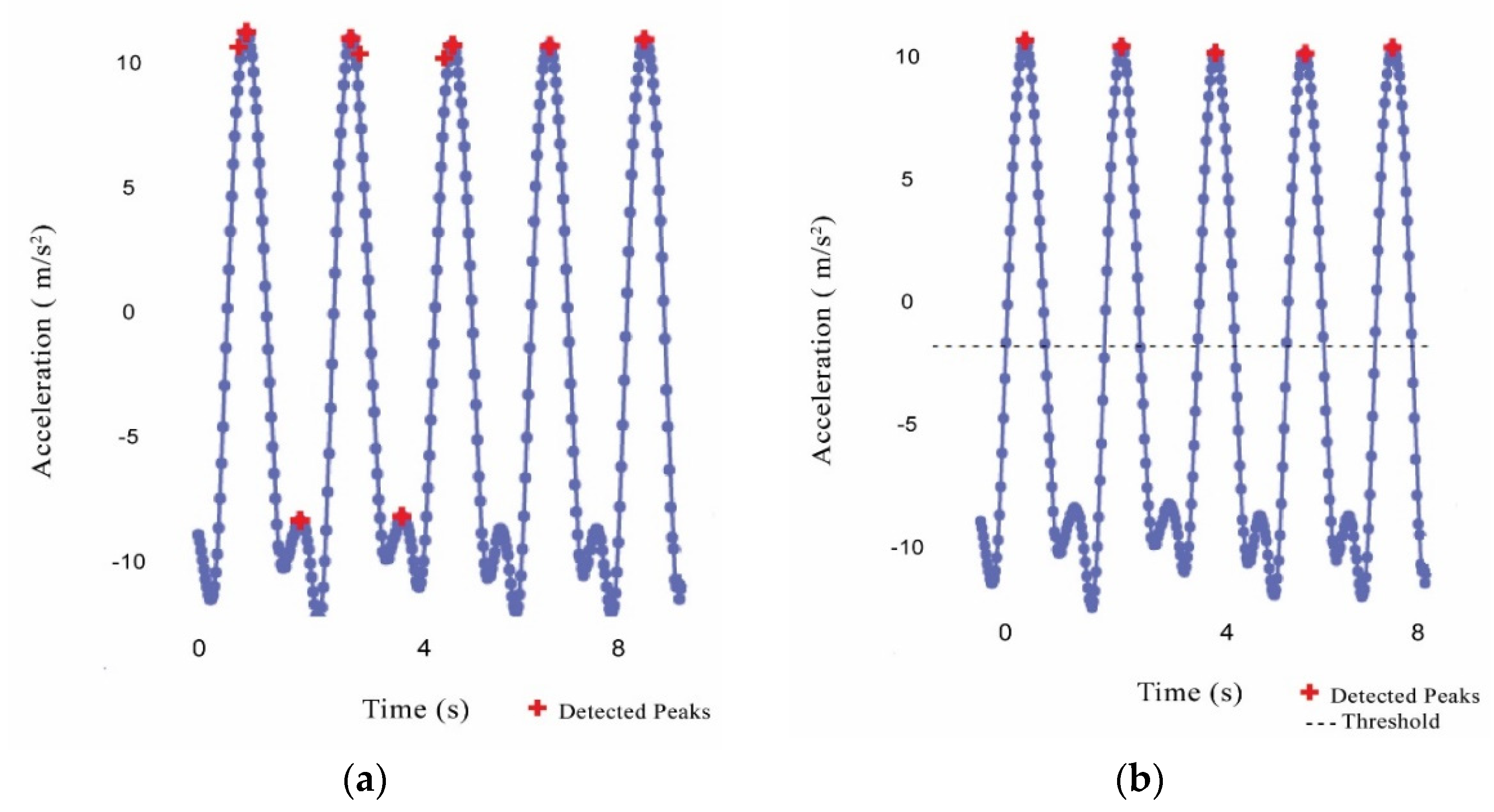
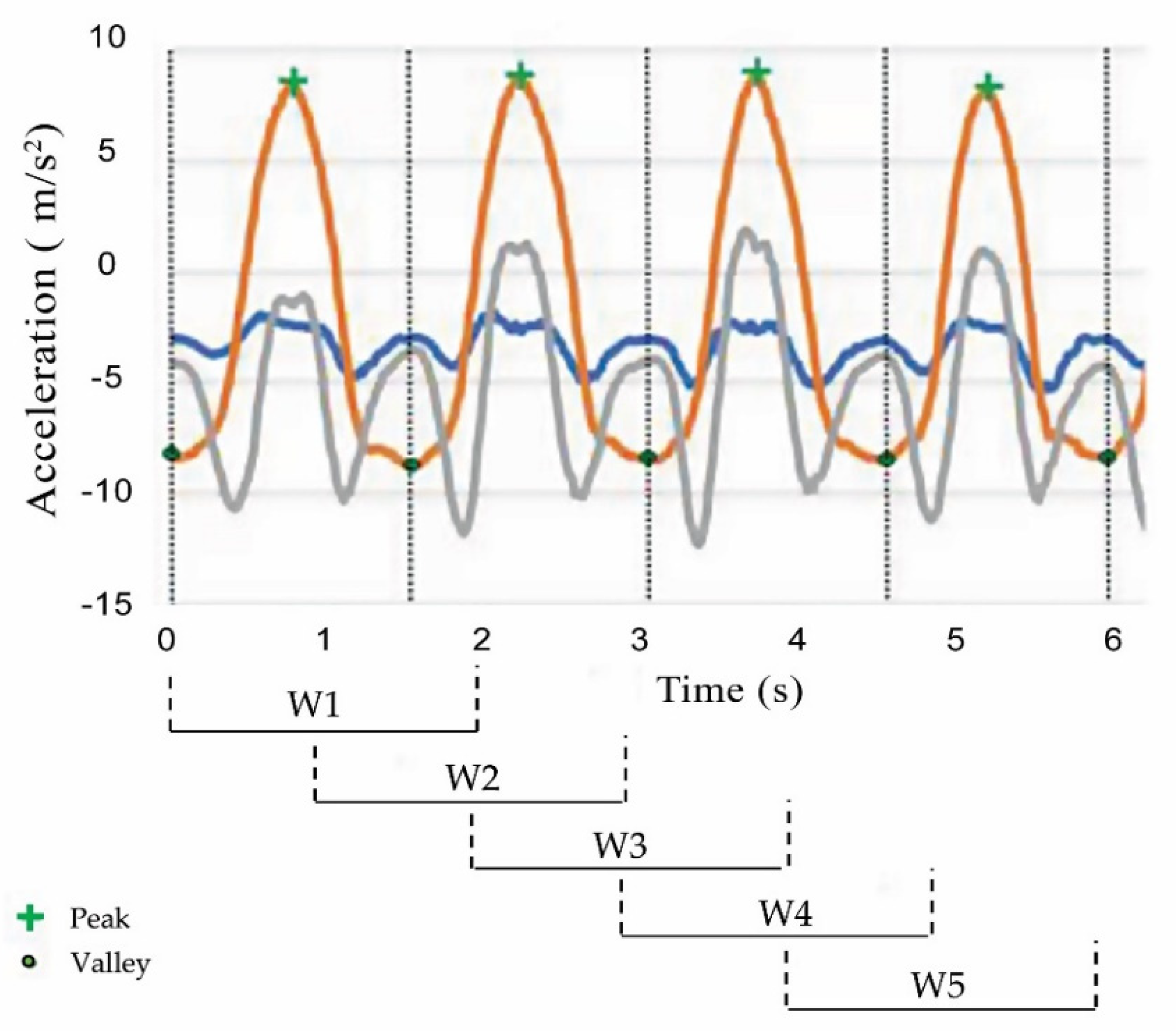
4.1. Selection of Peaks
4.2. Selection of Valleys
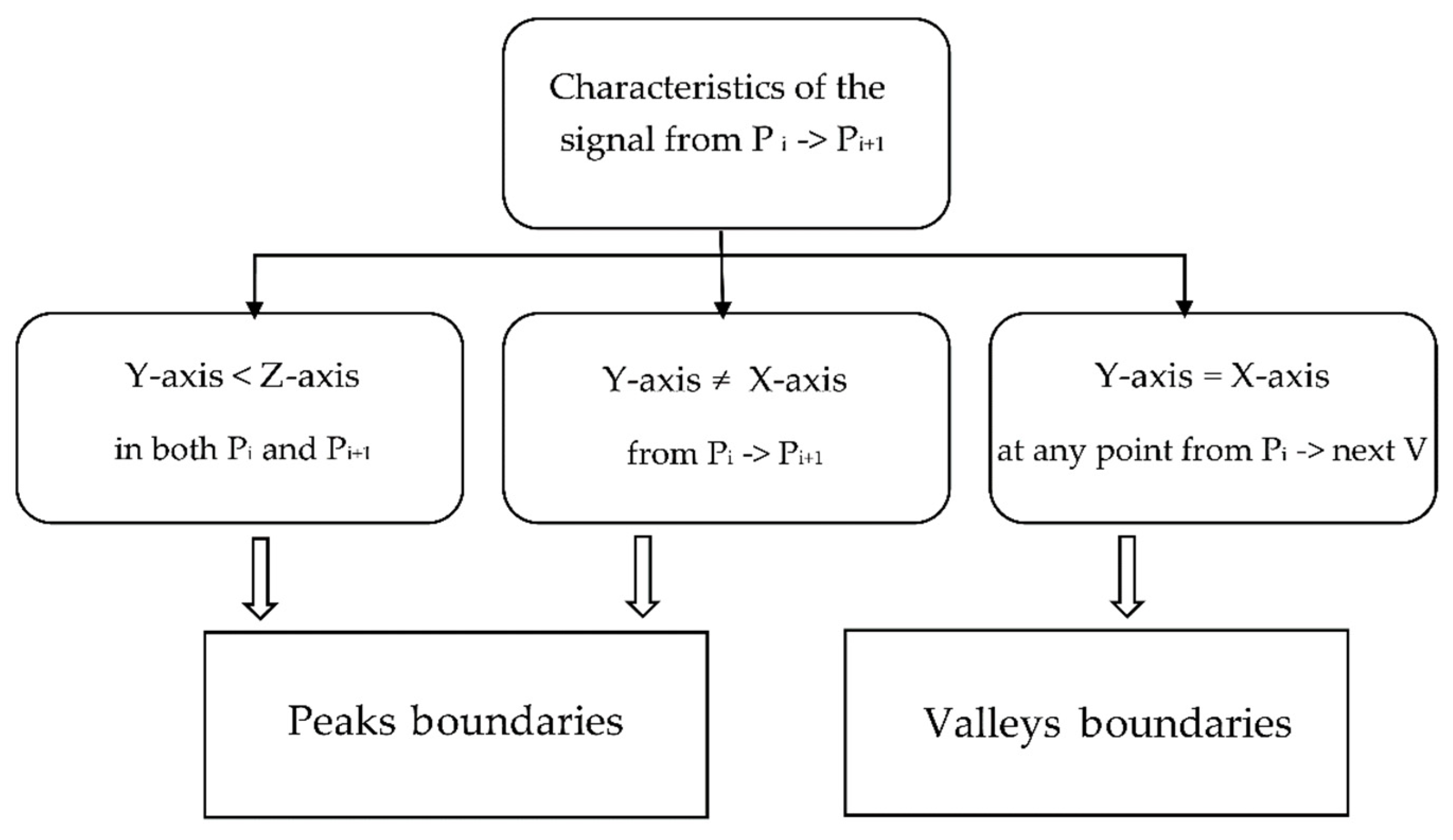
4.3. Determining Segment Boundaries
| Algorithm 1 Dynamic Segmentation |
| 1: Input: |
| 2: S: a set of tri-axial accelerometer data |
| 3: Output: |
| 4: A set of segments: Seg = {seg1, seg2, …., segn} |
| 5: peaks = indices of all peaks in Y-axis using Threshold1 and Distance |
| 6: valleys = indices of all valleys in Y-axis using Threshold2 |
| 7: p = total number of peaks |
| 8: v = total number of valleys |
| 9: for i = 0 to p-2 do |
| 10: if Y-axis value is smaller than Z-axis value at peak(i) and peak(i+1) |
| 11: OR no intersection between X-axis and Y-axis from peak(i) to peak(i+1) then |
| 12: for h = peaks (i) to peaks (i+1) do |
| 13: Add S(h) to Segi |
| 14: end for |
| 15: else if intersection exists between X-axis and Y-axis at any point from peak(i) to next valley then |
| 16: for k = 1 to v-1 do |
| 17: if valleys (k) is the valley that directly follows peaks (i) |
| 18: AND valleys (k-1) is the valley that directly precedes peaks (i) then |
| 19: For h = valleys (k-1) to valleys (k) do |
| 20: Add S(h) to Segi |
| 21: end for |
| 22: end if |
| 23: end for |
| 24: else |
| 25: i = i+1 |
| 26: end if |
| 27: end for |
| 28: for k = 1 to v-1 do |
| 29: if valleys (k) is the valley that directly follows peaks (p-1) |
| 30: AND valleys (k-1) is the valley that directly precedes peaks (p-1) |
| 31: AND intersection exists between X-axis and Y-axis from peaks(p-1) to valleys (k) then |
| 32: for h = valleys (k-1) to valleys (k) do |
| 33: Add S(h) to Segp-1 |
| 34: end for |
| 35: end if |
| 36: end for |
5. Experimental Setup
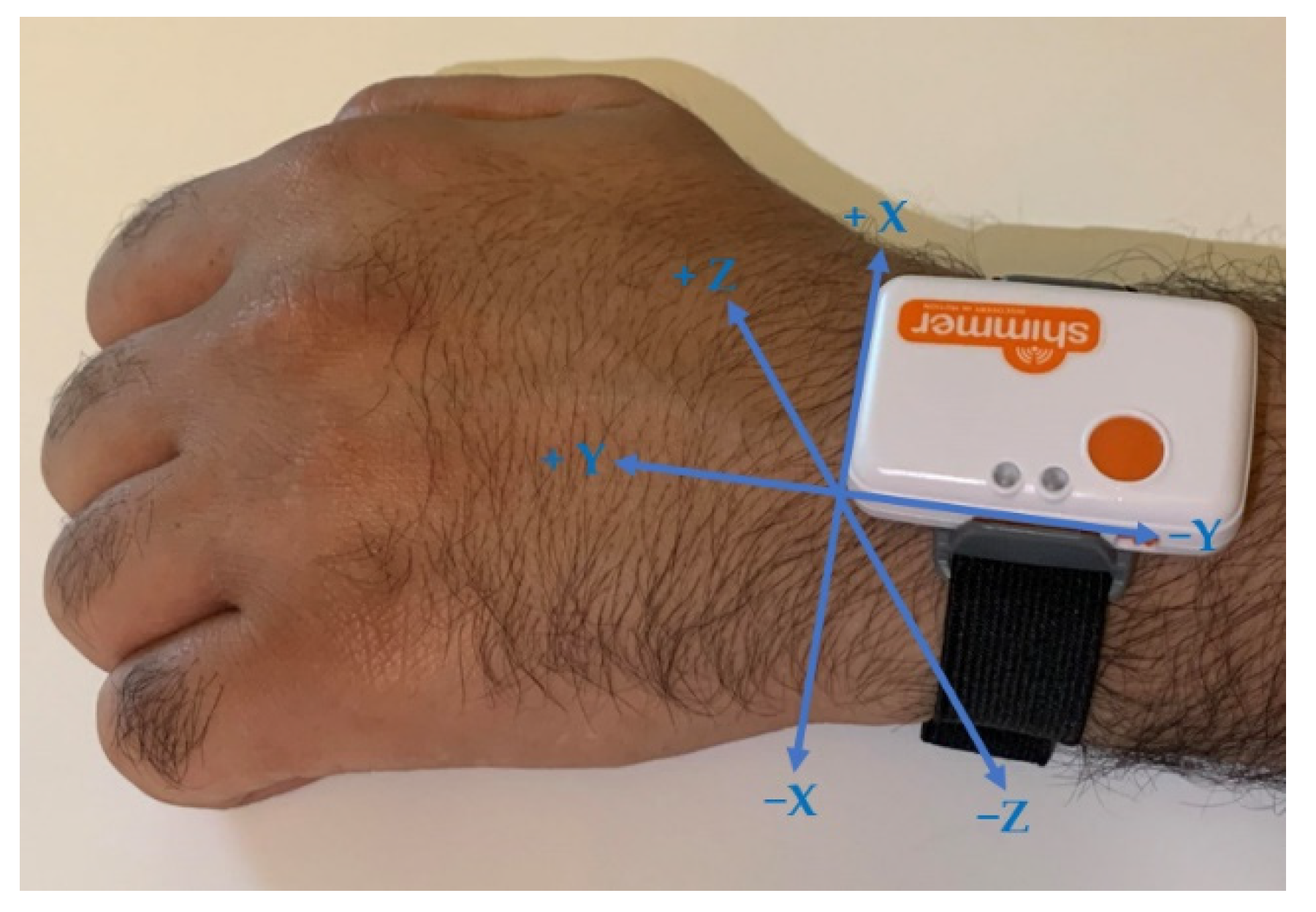
5.1. Data Acquisition
5.1.1. Participants
5.1.2. Activity Session
5.2. Data Preprocessing
- Smoothing
- Removal of Undesired Data (Cleaning)
5.3. Segmentation
5.4. Feature Extraction
5.5. Model Training and Validation Strategies
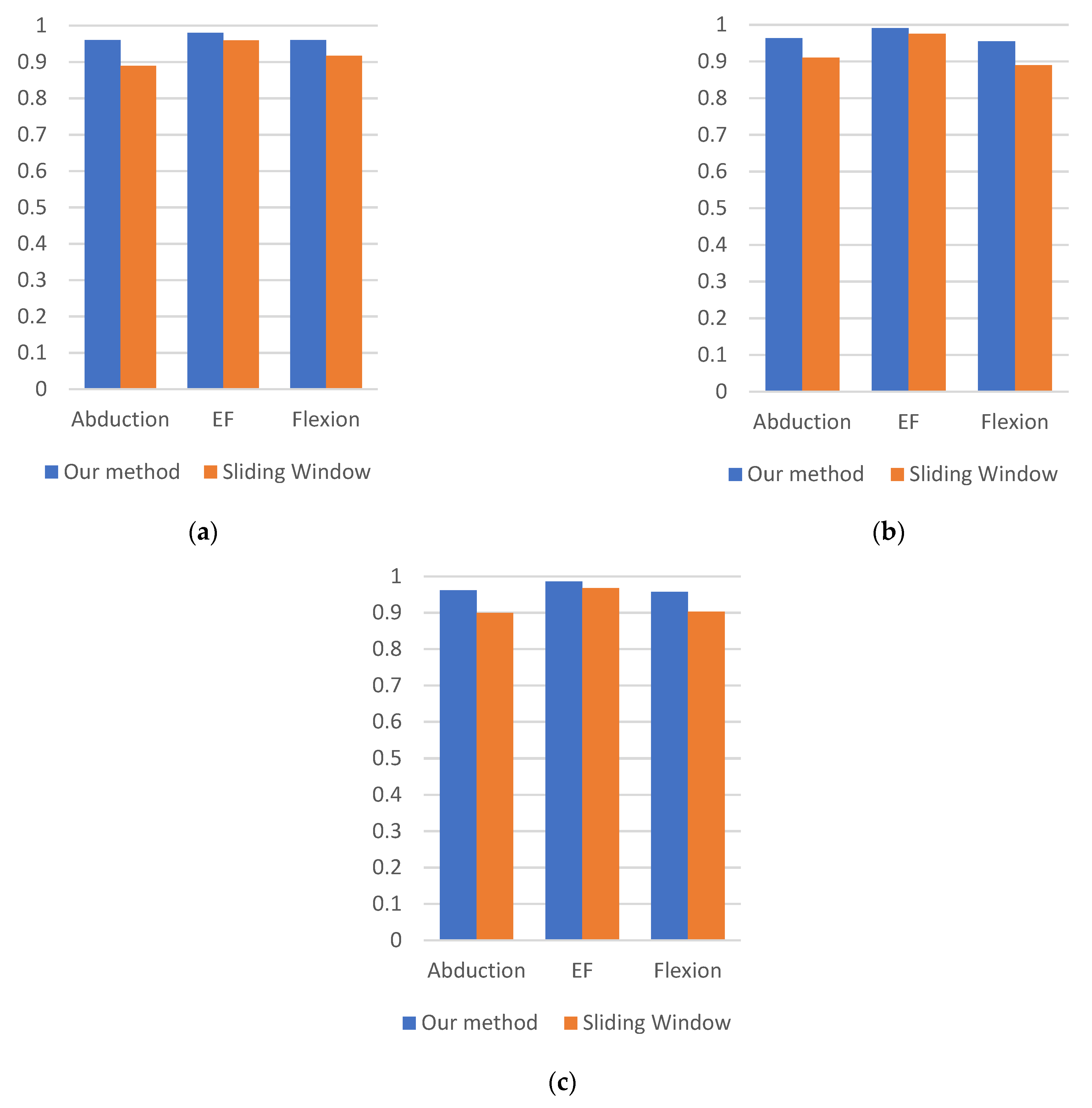
6. Results
7. Discussion
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ding, D.; Ayubi, S.; Hiremath, S.; Parmanto, B. Physical activity monitoring and sharing platform for manual wheelchair users. In Proceedings of the 2012 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, San Diego, CA, USA, 28 August 2012–1 September 2012; Volume 2012, pp. 5833–5836. [Google Scholar] [CrossRef]
- Harvey, L.A. Physiotherapy rehabilitation for people with spinal cord injuries. J. Physiother. 2016, 62, 4–11. [Google Scholar] [CrossRef] [PubMed]
- O’Sullivan, S.B.; Schmitz, T.J.; Fulk, G. Physical Rehabilitation, 7th ed.; F.A. Davis Co.: Philadelphia, PA, USA, 2019. [Google Scholar]
- Burns, A.S.; Marino, R.J.; Kalsi-Ryan, S.; Middleton, J.W.; Tetreault, L.A.; Dettori, J.R.; Mihalovich, K.E.; Fehlings, M.G. Type and Timing of Rehabilitation Following Acute and Subacute Spinal Cord Injury: A Systematic Review. Glob. Spine J. 2017, 7, 175S–194S. [Google Scholar] [CrossRef] [PubMed]
- Warms, C.A.; Whitney, J.D.; Belza, B. Measurement and description of physical activity in adult manual wheelchair users. Disabil. Health J. 2008, 1, 236–244. [Google Scholar] [CrossRef] [PubMed]
- Voicu, R.-A.; Dobre, C.; Bajenaru, L.; Ciobanu, R.-I. Human Physical Activity Recognition Using Smartphone Sensors. Sensors 2019, 19, 458. [Google Scholar] [CrossRef] [PubMed]
- Zambrana, C.; Idelsohn-Zielonka, S.; Claramunt-Molet, M.; Almenara-Masbernat, M.; Opisso, E.; Tormos, J.M.; Miralles, F.; Vargiu, E. Monitoring of upper-limb movements through inertial sensors—Preliminary results. Smart Health. 2019, 13, 100059. [Google Scholar] [CrossRef]
- Leving, M.T.; Horemans, H.L.D.; Vegter, R.J.K.; De Groot, S.; Bussmann, J.B.J.; Van Der Woude, L.H.V. Validity of consumer-grade activity monitor to identify manual wheelchair propulsion in standardized activities of daily living. PLoS ONE 2018, 13, e0194864. [Google Scholar] [CrossRef]
- Bisio, I.; Delfino, A.; Lavagetto, F.; Sciarrone, A. Enabling IoT for In-Home Rehabilitation: Accelerometer Signals Classification Methods for Activity and Movement Recognition. IEEE Internet Things J. 2016, 4, 135–146. [Google Scholar] [CrossRef]
- Panwar, M.; Prakash, C.; Piswas, D.; Asharyya, A. CNN based approach for activity recognition using a wrist-worn accelerometer. In Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, EMBS, Jeju Island, Korea, 11–15 July 2017; pp. 2438–2441. [Google Scholar]
- Twomey, N.; Diethe, T.; Fafoutis, X.; Elsts, A.; McConville, R.; Flach, P.; Craddock, I. A Comprehensive Study of Activity Recognition Using Accelerometers. Informatics 2018, 5, 27. [Google Scholar] [CrossRef]
- Bao, L.; Intille, S.S. Activity Recognition from User-Annotated Acceleration Data. Pervasive 2004, 3001, 1–17. [Google Scholar]
- Bergmann, J.H.M.; McGregor, A.H. Body-Worn Sensor Design: What Do Patients and Clinicians Want? Ann. Biomed. Eng. 2011, 39, 2299–2312. [Google Scholar] [CrossRef]
- Dostál, O.; Procházka, A.; Vyšata, O.; Ťupa, O.; Cejnar, P.; Vališ, M. Recognition of motion patterns using accelerometers for ataxic gait assessment. Neural Comput. Appl. 2020, 2, 1–9. [Google Scholar] [CrossRef]
- Pernek, I.; Kurillo, G.; Stiglic, G.; Bajcsy, R. Recognizing the intensity of strength training exercises with wearable sensors. J. Biomed. Inform. 2015, 58, 145–155. [Google Scholar] [CrossRef]
- Biswas, D.; Cranny, A.; Gupta, N.; Maharatna, K.; Achner, J.; Klemke, J.; Jobges, M.; Ortmann, S. Recognizing upper limb movements with wrist worn inertial sensors using k-means clustering classification. Hum. Mov. Sci. 2015, 40, 59–76. [Google Scholar] [CrossRef]
- Lin, H.-C.; Chiang, S.-Y.; Lee, K.; Kan, Y.-C. An Activity Recognition Model Using Inertial Sensor Nodes in a Wireless Sensor Network for Frozen Shoulder Rehabilitation Exercises. Sensors 2015, 15, 2181–2204. [Google Scholar] [CrossRef]
- Cai, S.; Chen, Y.; Huang, S.; Wu, Y.; Zheng, H.; Li, X.; Xie, L. SVM-based classification of sEMG signals for upper-limb self-rehabilitation training. Front. Neurorobot. 2019, 13, 1–10. [Google Scholar] [CrossRef]
- Ni, Q.; Patterson, T.; Cleland, I.; Nugent, C. Dynamic detection of window starting positions and its implementation within an activity recognition framework. J. Biomed. Inform. 2016, 62, 171–180. [Google Scholar] [CrossRef] [PubMed]
- Wang, G.; Li, Q.; Wang, L.; Wang, W.; Wu, M.; Liu, T. Impact of Sliding Window Length in Indoor Human Motion Modes and Pose Pattern Recognition Based on Smartphone Sensors. Sensors 2018, 18, 1965. [Google Scholar] [CrossRef] [PubMed]
- Li, J.-H.; Tian, L.; Wang, H.; An, Y.; Wang, K.; Yu, L. Segmentation and Recognition of Basic and Transitional Activities for Continuous Physical Human Activity. IEEE Access 2019, 7, 42565–42576. [Google Scholar] [CrossRef]
- Fida, B.; Bernabucci, I.; Bibbo, D.; Conforto, S.; Schmid, M. Varying behavior of different window sizes on the classification of static and dynamic physical activities from a single accelerometer. Med. Eng. Phys. 2015, 37, 705–711. [Google Scholar] [CrossRef]
- Ni, Q.; Zhang, L.; Li, L. A Heterogeneous Ensemble Approach for Activity Recognition with Integration of Change Point-Based Data Segmentation. Appl. Sci. 2018, 8, 1695. [Google Scholar] [CrossRef]
- Noor, M.H.M.; Salcic, Z.; Wang, K.I.-K. Adaptive sliding window segmentation for physical activity recognition using a single tri-axial accelerometer. Pervasive Mob. Comput. 2017, 38, 41–59. [Google Scholar] [CrossRef]
- Santos, L.; Khoshhal, K.; Dias, J. Trajectory-based human action segmentation. Pattern Recognit. 2015, 48, 568–579. [Google Scholar] [CrossRef]
- Zhang, S.; Chen, H.; Jiang, C.; Zhang, S. An adaptive time window method for human activity recognition. In Proceedings of the 2015 IEEE 28th Canadian Conference on Electrical and Computer Engineering, Halifax, NS, Canada, 3–6 May 2015; pp. 1188–1192. [Google Scholar] [CrossRef]
- Ling, Y. Automatic human daily activity segmentation applying smart sensing technology. Int. J. Smart Sens. Intell. Syst. 2015, 8, 1624–1640. [Google Scholar] [CrossRef]
- Physio Therapy Exercises. Available online: https://www.physiotherapyexercises.com (accessed on 3 October 2019).
- Nas, K.; Yazmalar, L.; Şah, V.; Aydin, A.; Öneş, K. Rehabilitation of spinal cord injuries. World J. Orthop. 2015, 6, 8–16. [Google Scholar] [CrossRef] [PubMed]
- Côté, M.-P.; Murray, M.; Lemay, M.A. Rehabilitation Strategies after Spinal Cord Injury: Inquiry into the Mechanisms of Success and Failure. J. Neurotrauma 2017, 34, 1841–1857. [Google Scholar] [CrossRef] [PubMed]
- Janidarmian, M.; Fekr, A.R.; Radecka, K.; Zilic, Z. A Comprehensive Analysis on Wearable Acceleration Sensors in Human Activity Recognition. Sensors 2017, 17, 529. [Google Scholar] [CrossRef] [PubMed]
- Ignatov, A. Real-time human activity recognition from accelerometer data using Convolutional Neural Networks. Appl. Soft Comput. 2018, 62, 915–922. [Google Scholar] [CrossRef]
- Garciamasso, X.; Serra-Añó, P.; Gonzalez, L.M.; Ye-Lin, Y.; Prats-Boluda, G.; Garcia-Casado, J. Identifying physical activity type in manual wheelchair users with spinal cord injury by means of accelerometers. Spinal Cord 2015, 53, 772–777. [Google Scholar] [CrossRef]
- Siirtola, P.; Laurinen, P.; Roning, J.; Kinnunen, H. Efficient accelerometer-based swimming exercise tracking. In Proceedings of the 2011 IEEE Symposium on Computational Intelligence and Data Mining (CIDM), Paris, France, 11–15 April 2011; IEEE: New York, NY, USA, 2011; pp. 156–161. [Google Scholar]
- Han, S.; Meng, Z.; Omisore, O.; Akinyemi, T.; Yan, Y. Random Error Reduction Algorithms for MEMS Inertial Sensor Accuracy Improvement—A Review. Micromachines 2020, 11, 1021. [Google Scholar] [CrossRef]
- Erdaş, B.; Atasoy, I.; Açici, K.; Oǧul, H. Integrating Features for Accelerometer-based Activity Recognition. Procedia Comput. Sci. 2016, 58, 522–527. [Google Scholar] [CrossRef]
- Hiremath, S.V.; Intille, S.S.; Kelleher, A.; Cooper, R.A.; Ding, D. Detection of physical activities using a physical activity monitor system for wheelchair users. Med. Eng. Phys. 2015, 37, 68–76. [Google Scholar] [CrossRef] [PubMed]
- Elhoushi, M.; Georgy, J.; Noureldin, A.; Korenberg, M.J. A Survey on Approaches of Motion Mode Recognition Using Sensors. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1662–1686. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Definition |
|---|---|
| Minimum | min(d) = lowest di, i = 1, 2, …, N |
| Maximum | max(d) = highest di, i = 1, 2, …, N |
| Range | range(d) = max(d) − min(d) |
| Mean | mean(d) = |
| Standard Deviation | SD(d) = |
| Root Mean Square | RMS(d) = |
| Accuracy | Recall | Precision | F-Measure | |
|---|---|---|---|---|
| Our method | 96.67 ± 2.7% | 96.67 ± 1.2% | 96.97 ± 1.9% | 96.82 ± 1.5% |
| Sliding Window | 91.44 ± 5.9% | 91.90 ± 3.9% | 92.51 ± 4.5 % | 92.21 ± 3.8% |
| Abduction | EF | Flexion | |
|---|---|---|---|
| Abduction | 96 | 1 | 3 |
| EF | 98 | 2 | |
| Flexion | 4 | 96 |
| SVM | NB | J48 | KNN | |
|---|---|---|---|---|
| Our method | 96.67 ± 2.7% | 91 ± 3.4% | 95 ± 5.1% | 95.65 ± 1.9% |
| Sliding Window | 91.44 ± 5.9% | 84.49 ± 3.9% | 89.78 ± 5.4% | 90.28 ± 5.4% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alhammad, N.; Al-Dossari, H. Dynamic Segmentation for Physical Activity Recognition Using a Single Wearable Sensor. Appl. Sci. 2021, 11, 2633. https://doi.org/10.3390/app11062633
Alhammad N, Al-Dossari H. Dynamic Segmentation for Physical Activity Recognition Using a Single Wearable Sensor. Applied Sciences. 2021; 11(6):2633. https://doi.org/10.3390/app11062633
Chicago/Turabian StyleAlhammad, Nora, and Hmood Al-Dossari. 2021. "Dynamic Segmentation for Physical Activity Recognition Using a Single Wearable Sensor" Applied Sciences 11, no. 6: 2633. https://doi.org/10.3390/app11062633
APA StyleAlhammad, N., & Al-Dossari, H. (2021). Dynamic Segmentation for Physical Activity Recognition Using a Single Wearable Sensor. Applied Sciences, 11(6), 2633. https://doi.org/10.3390/app11062633