
Kinematic and Aerodynamic Investigation of the Butterfly in Forward Free Flight for the Butterfly-Inspired Flapping Wing Air Vehicle




Abstract
1. Introduction
2. Materials and Methods
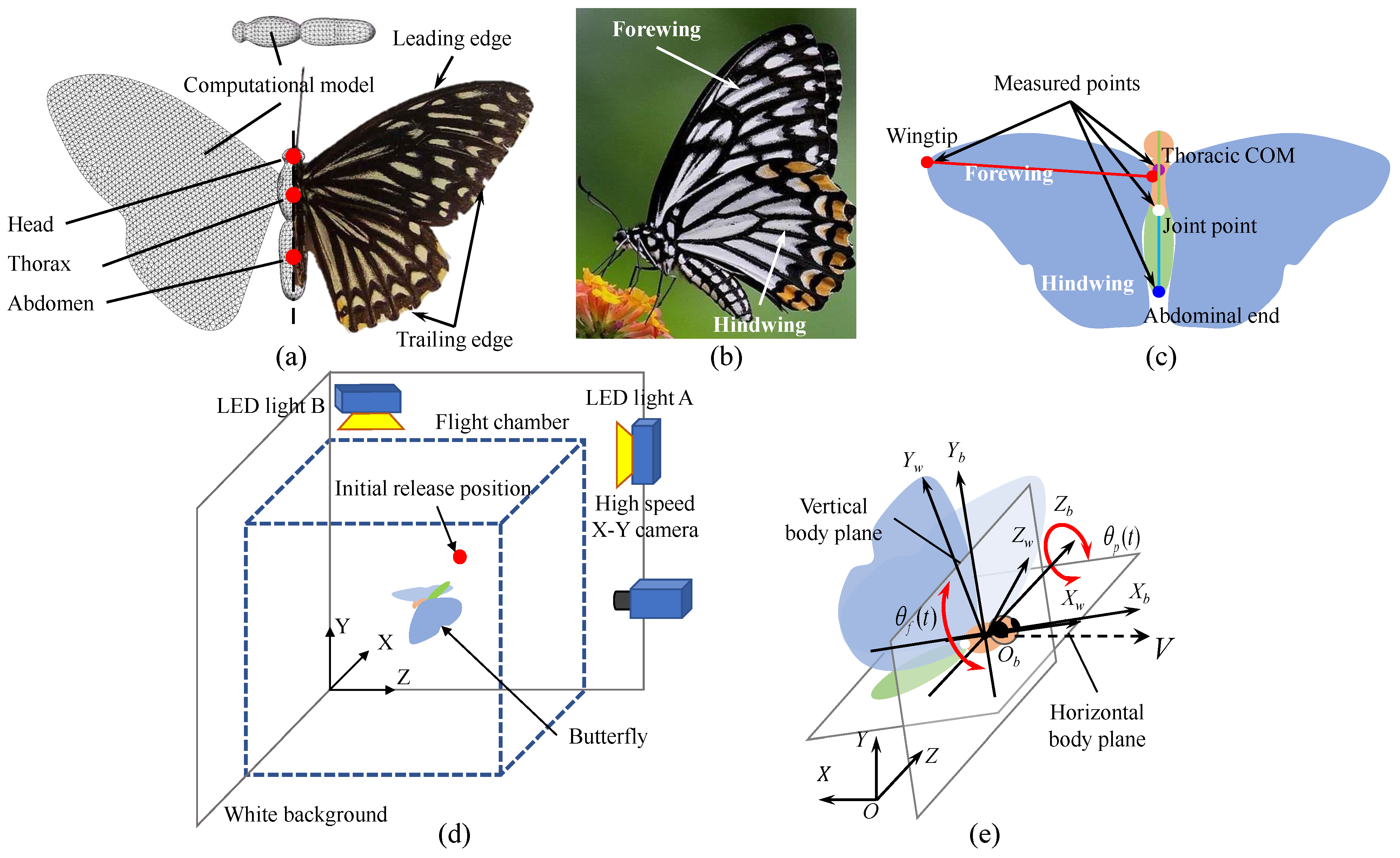
2.1. Materials and Equipment
2.2. Measurement and Calculation of Kinematics Parameters
2.2.1. Coordinate System of the Flight Kinematics
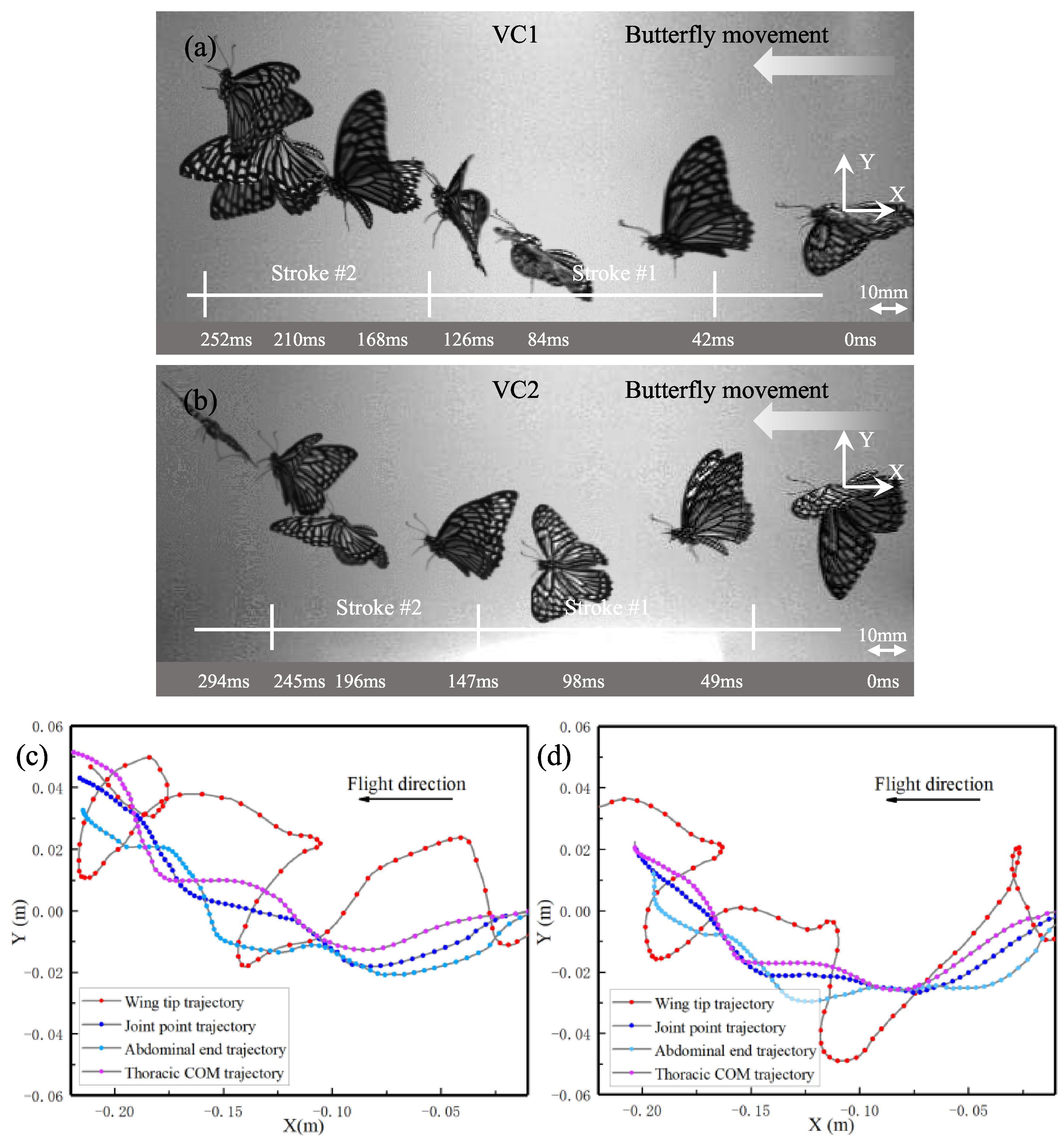
2.2.2. Movement Tracking of Butterfly Flight
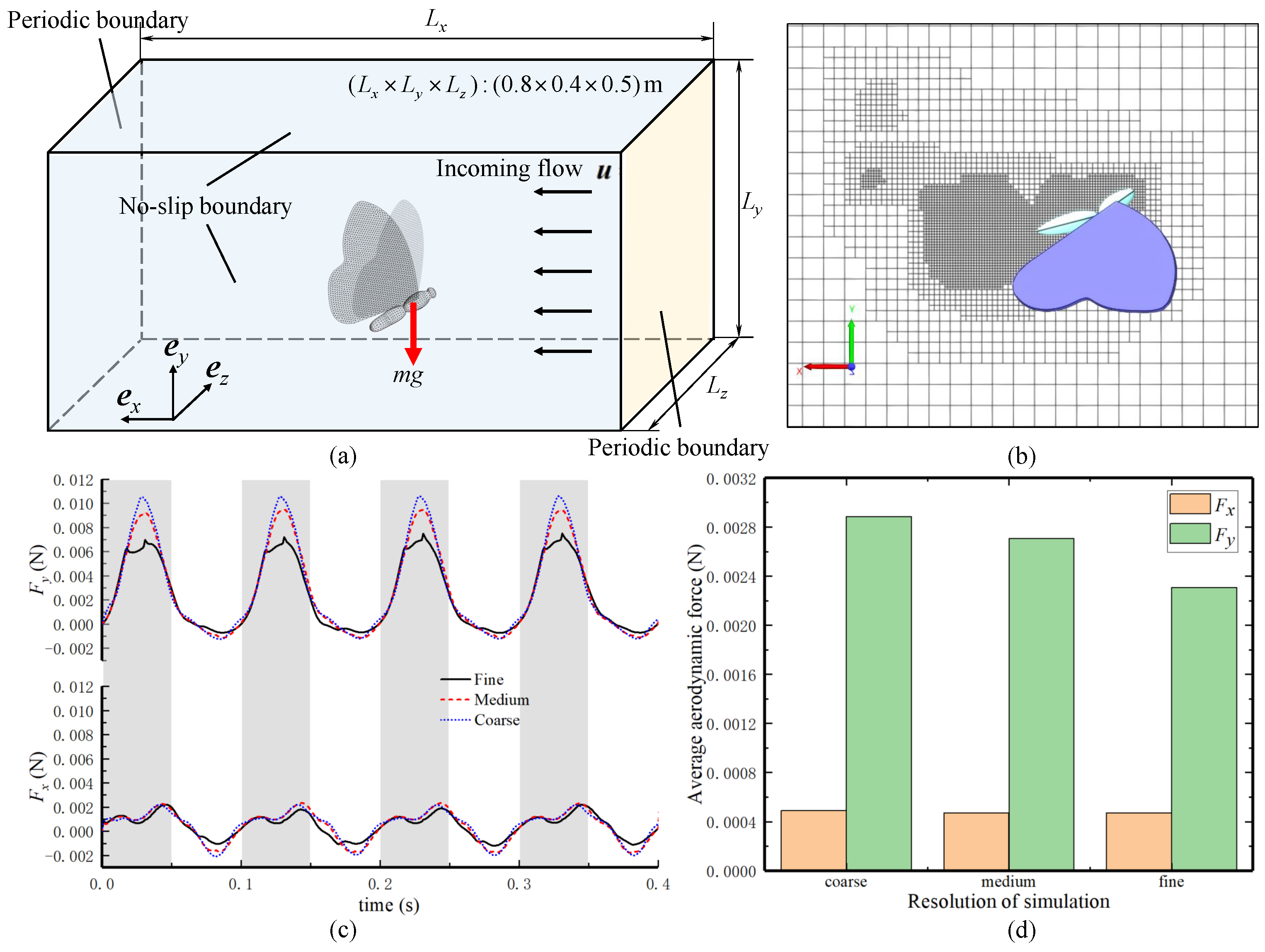
2.3. Computational Fluid Dynamics Simulation
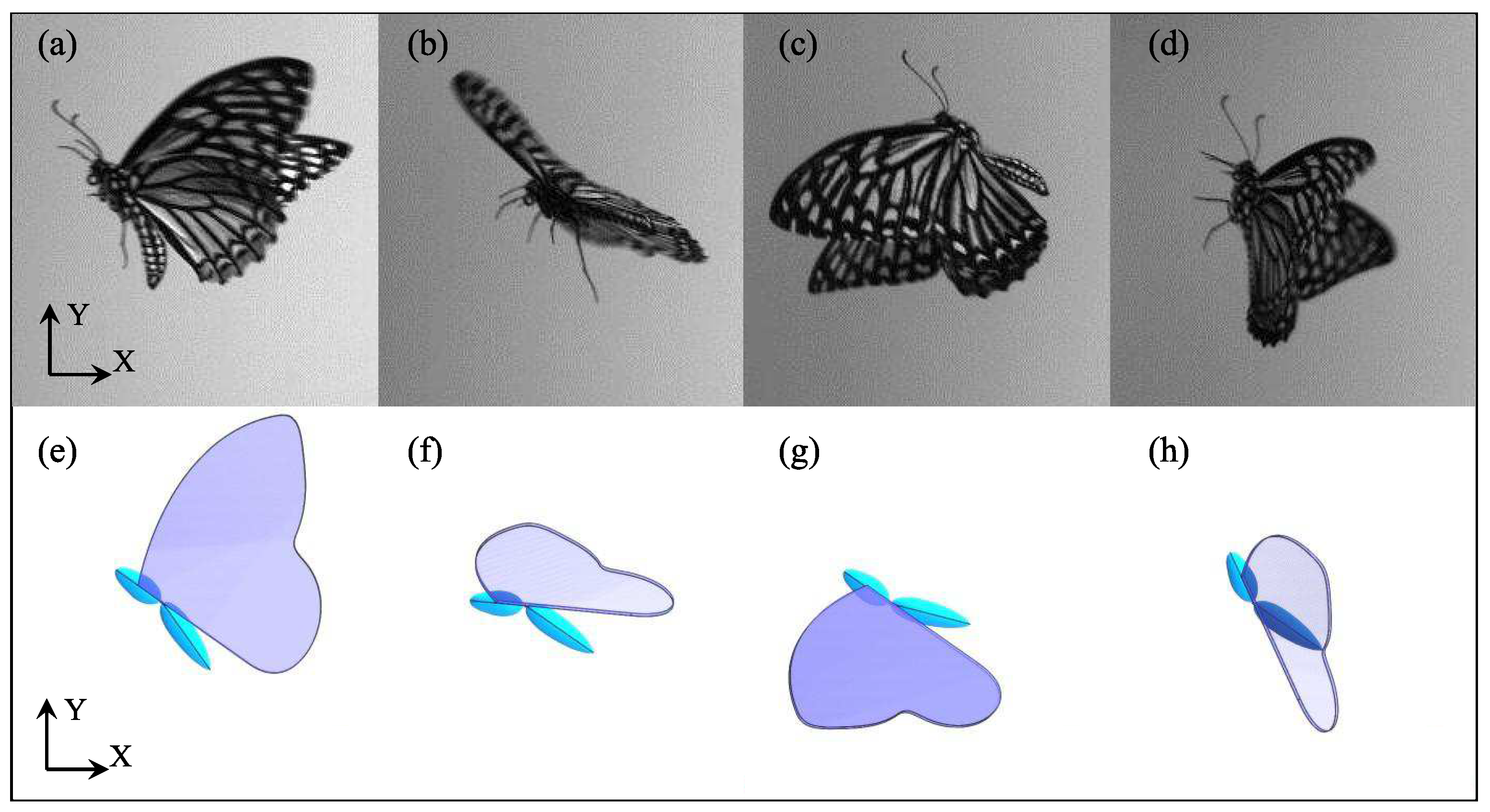
2.3.1. 3D Multi-Body Model of a Butterfly
2.3.2. Computational Setup for CFD Simulation
2.3.3. Mathematical Kinematics Model for Forward Flight
3. Results
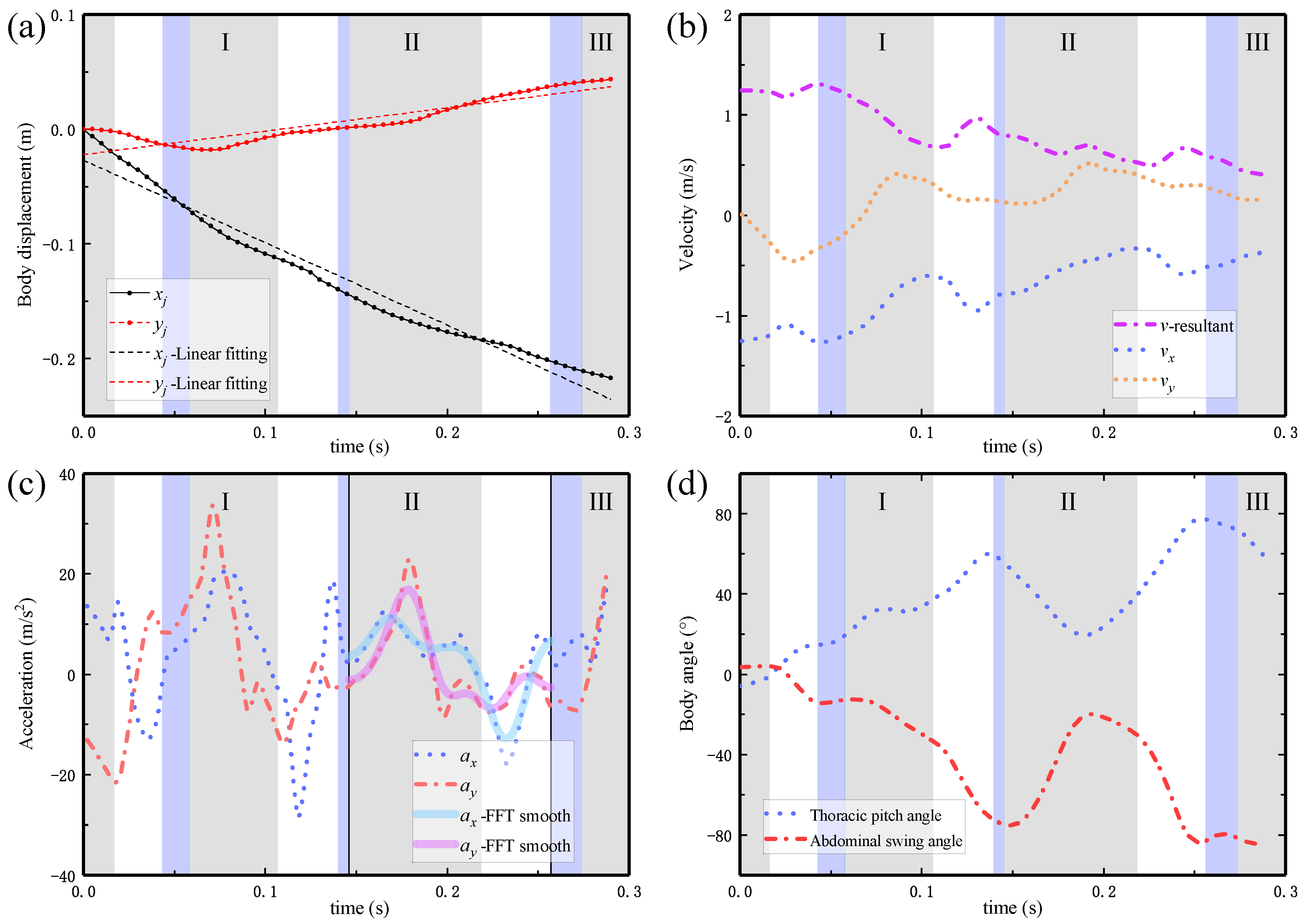
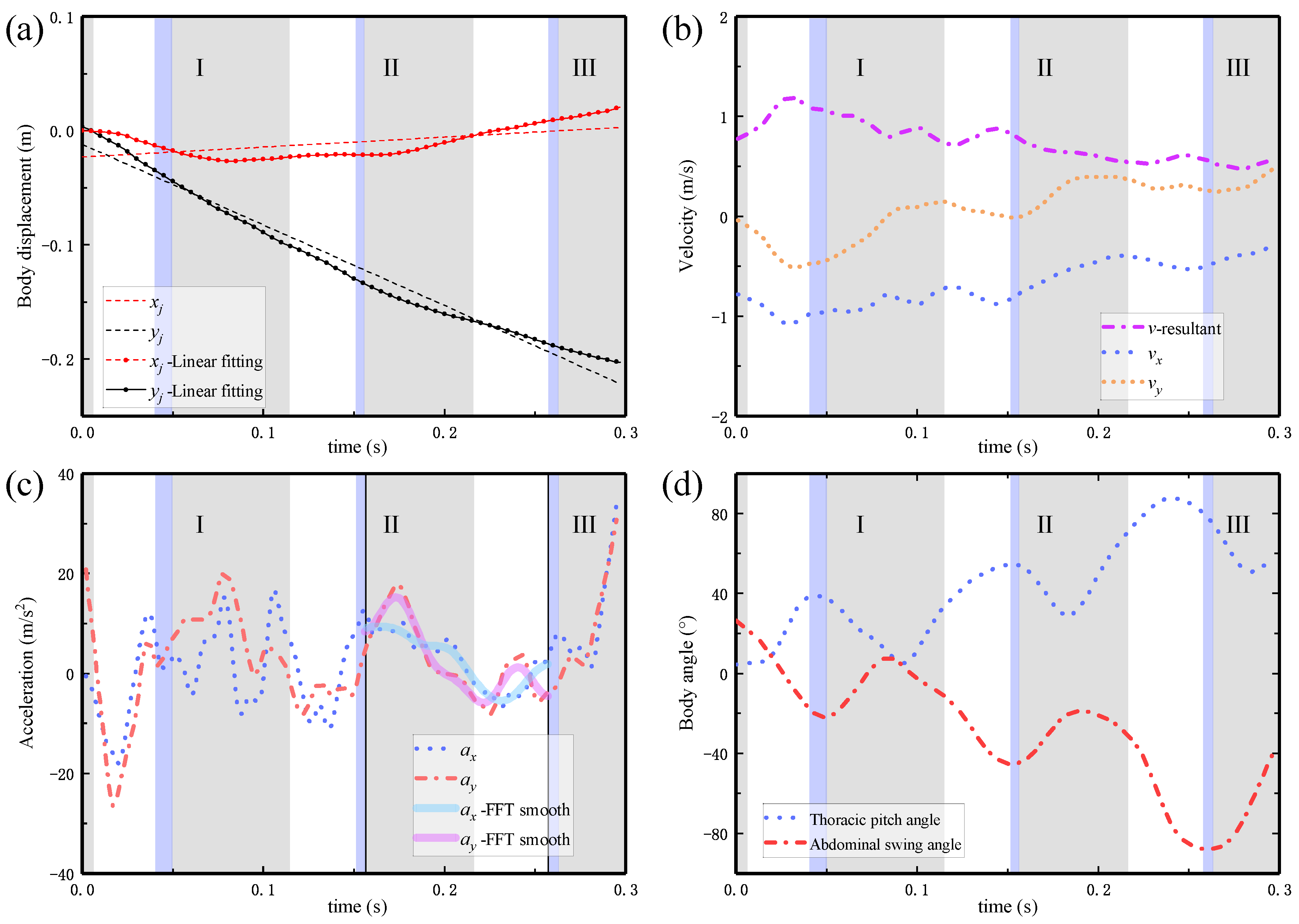
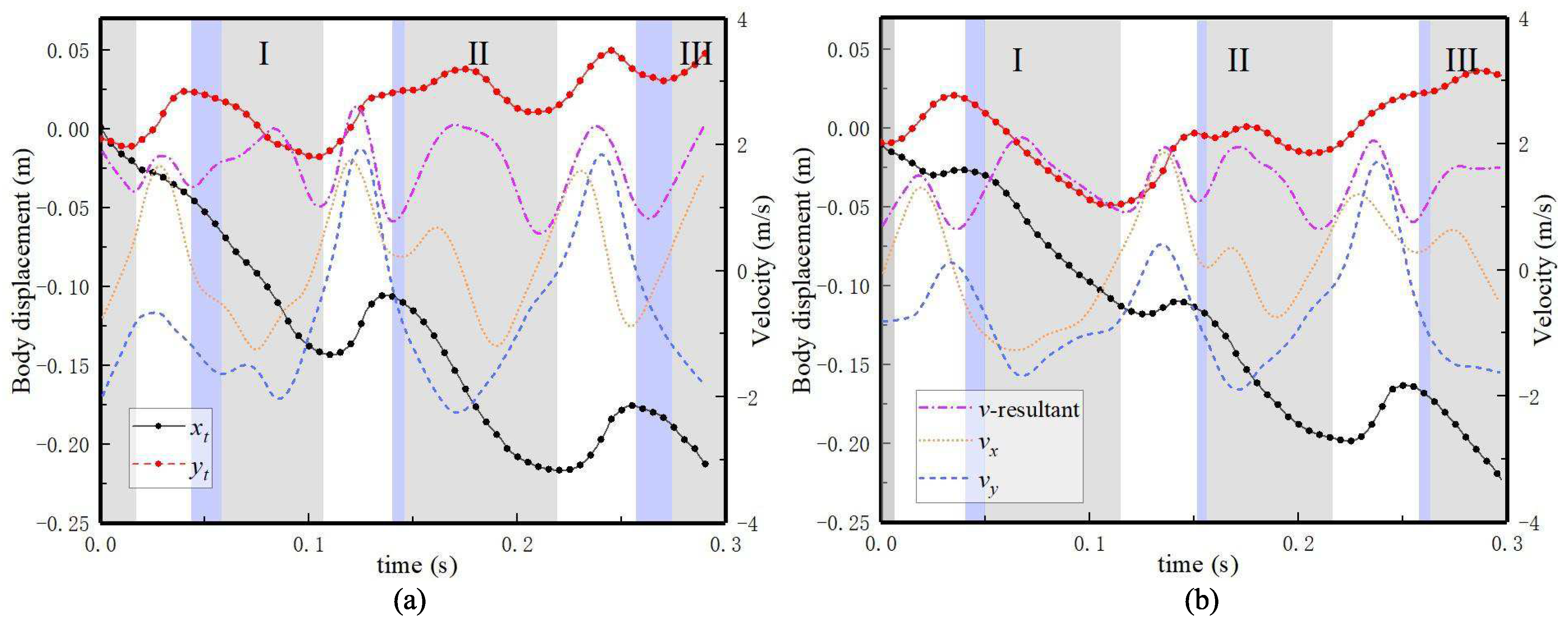
3.1. Wing and Body Kinematics of Butterfly Forward Flight
3.2. Effect of Kinematic Parameters and Computational Fluid Dynamics Simulations
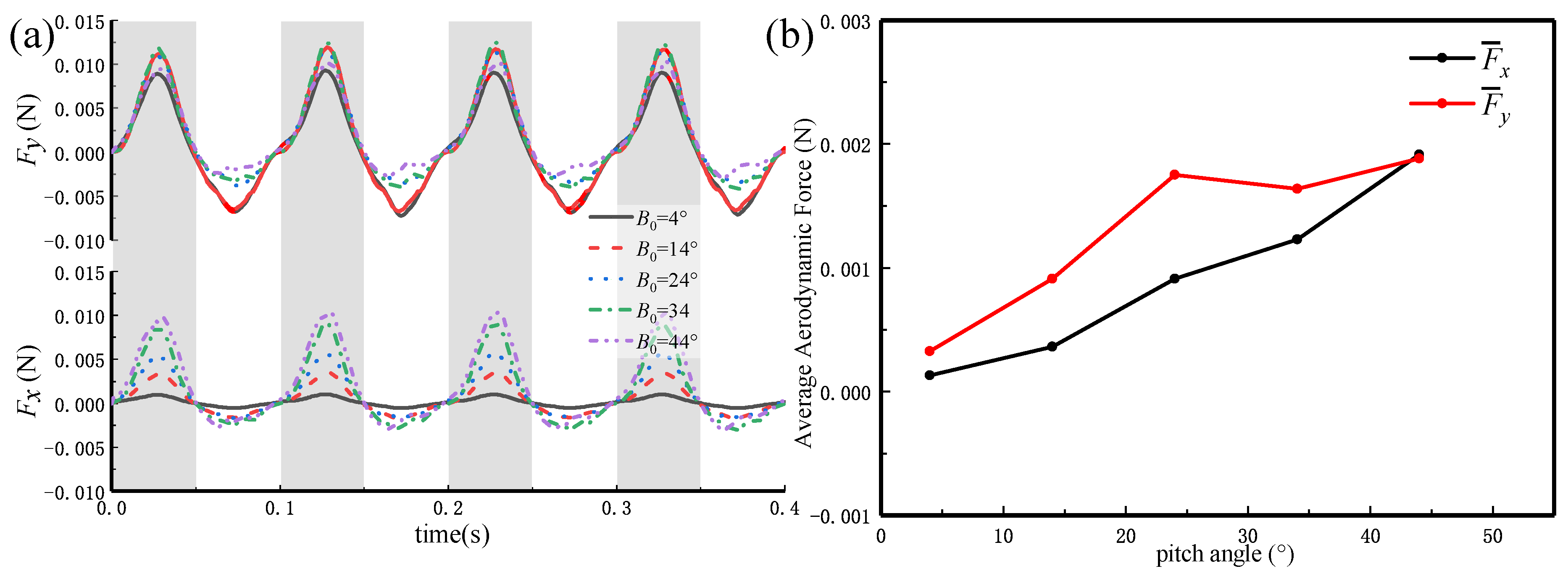
3.2.1. Effects of the Thoracic Pitch Angle (Fixed)
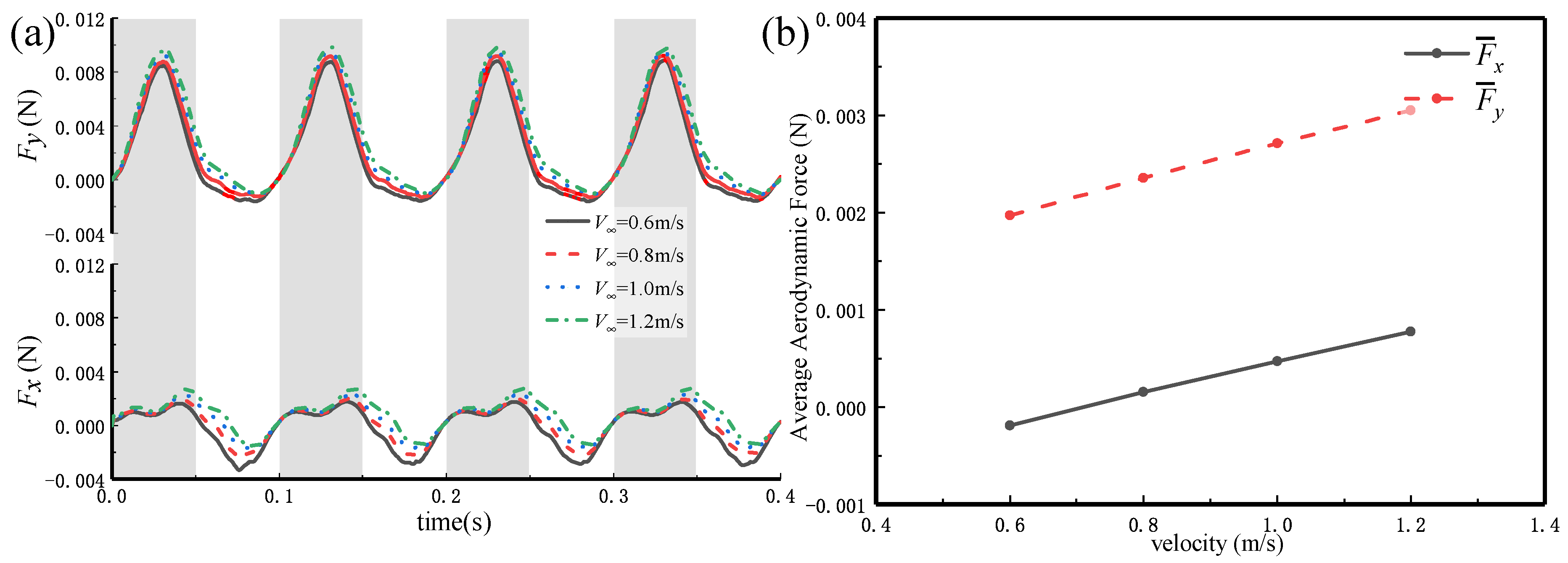
3.2.2. Effect of the Flight Velocity in Forward Free Flight
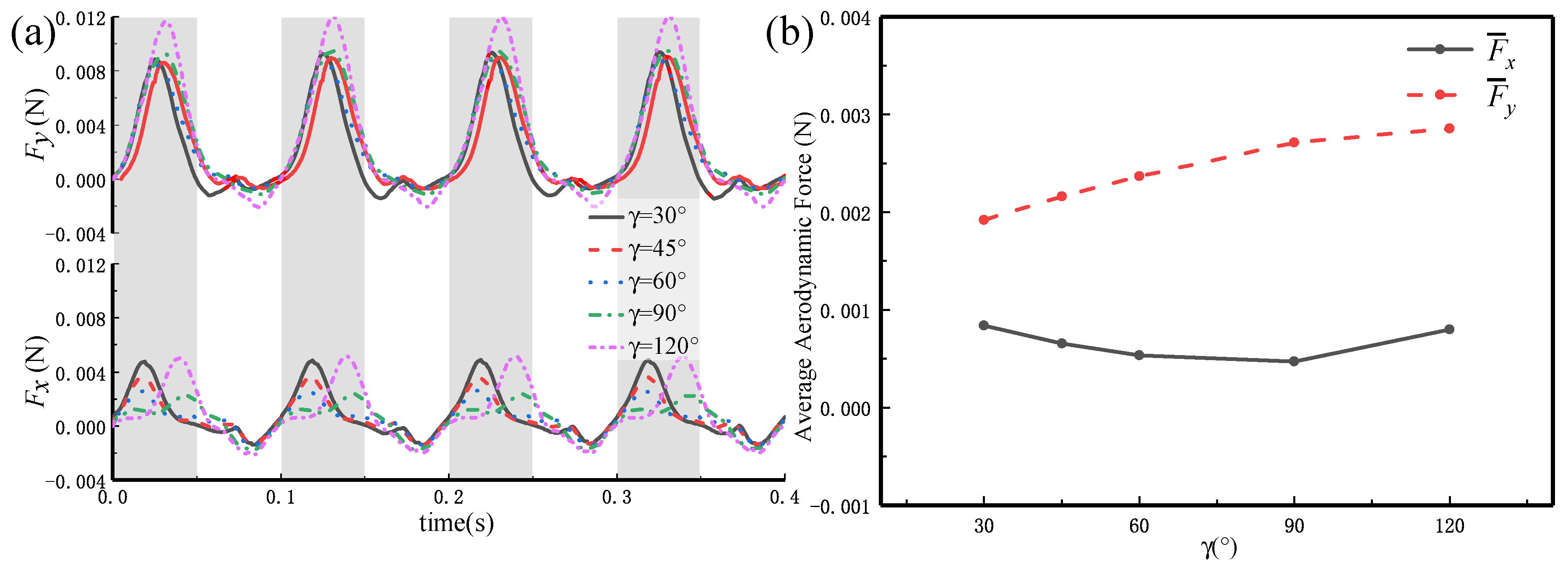
3.2.3. Effect of the Phase Difference between Flapping and Thoracic Pitch Motion
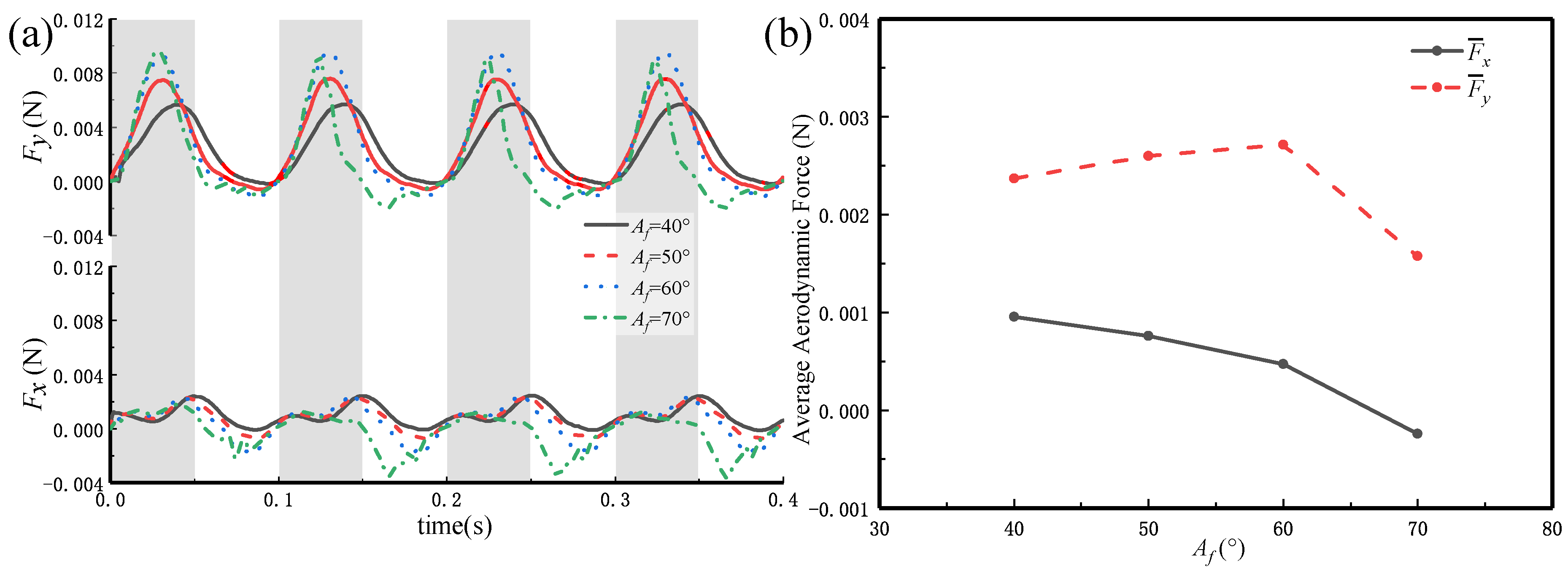
3.2.4. Effect of the Flapping Angle in Forward Free Flight
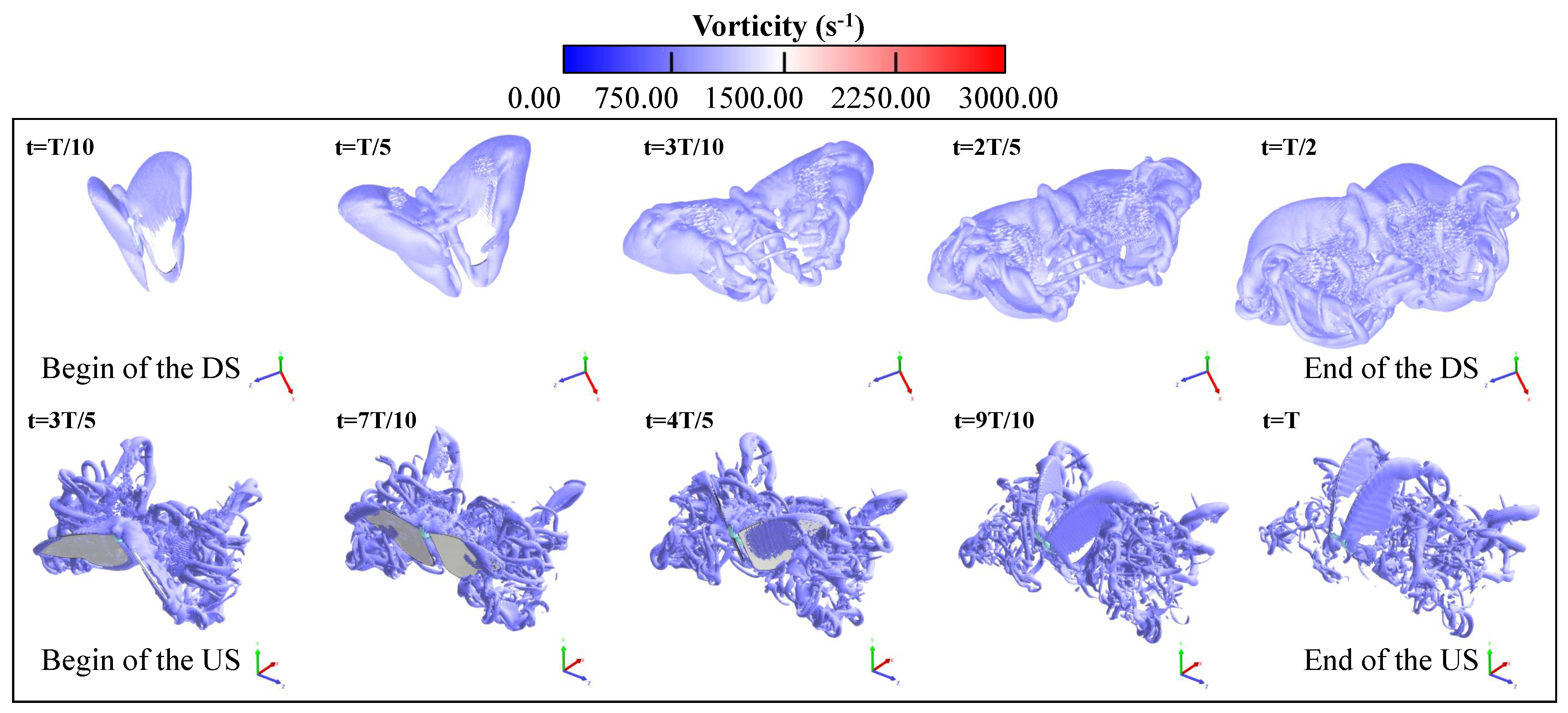
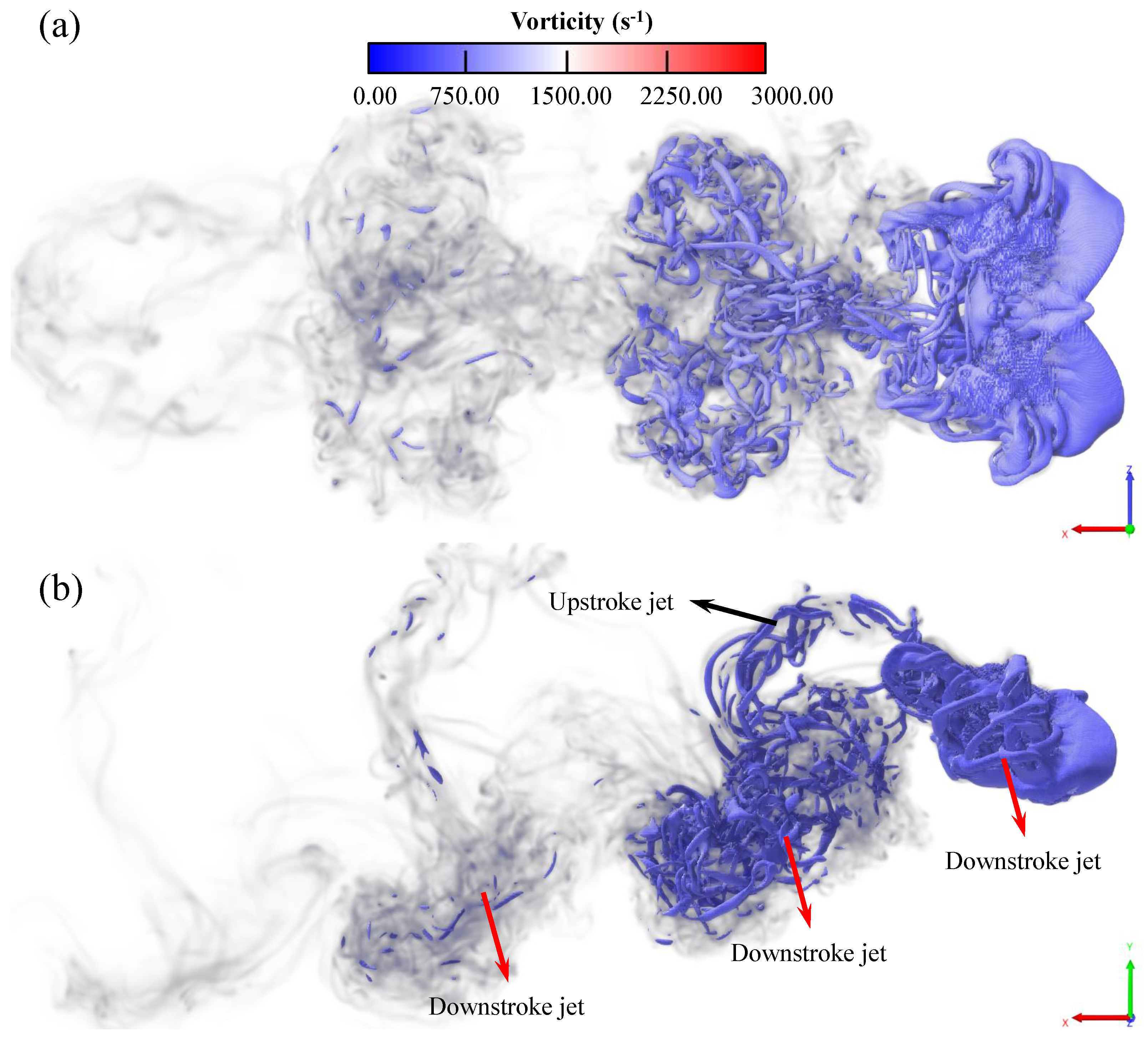
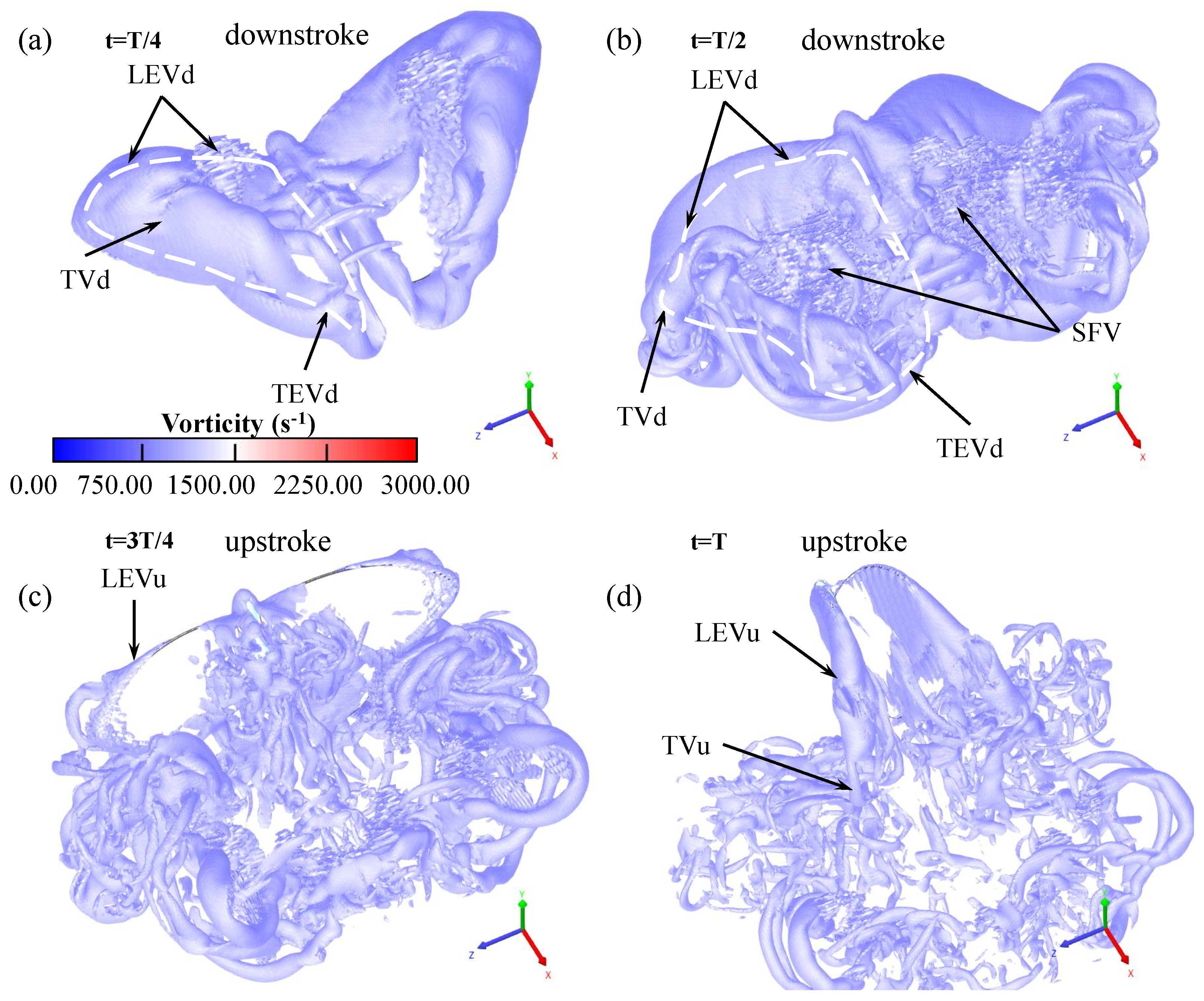
3.3. Vortical Structure during Forward Flight
3.3.1. Vortex Formation and Development
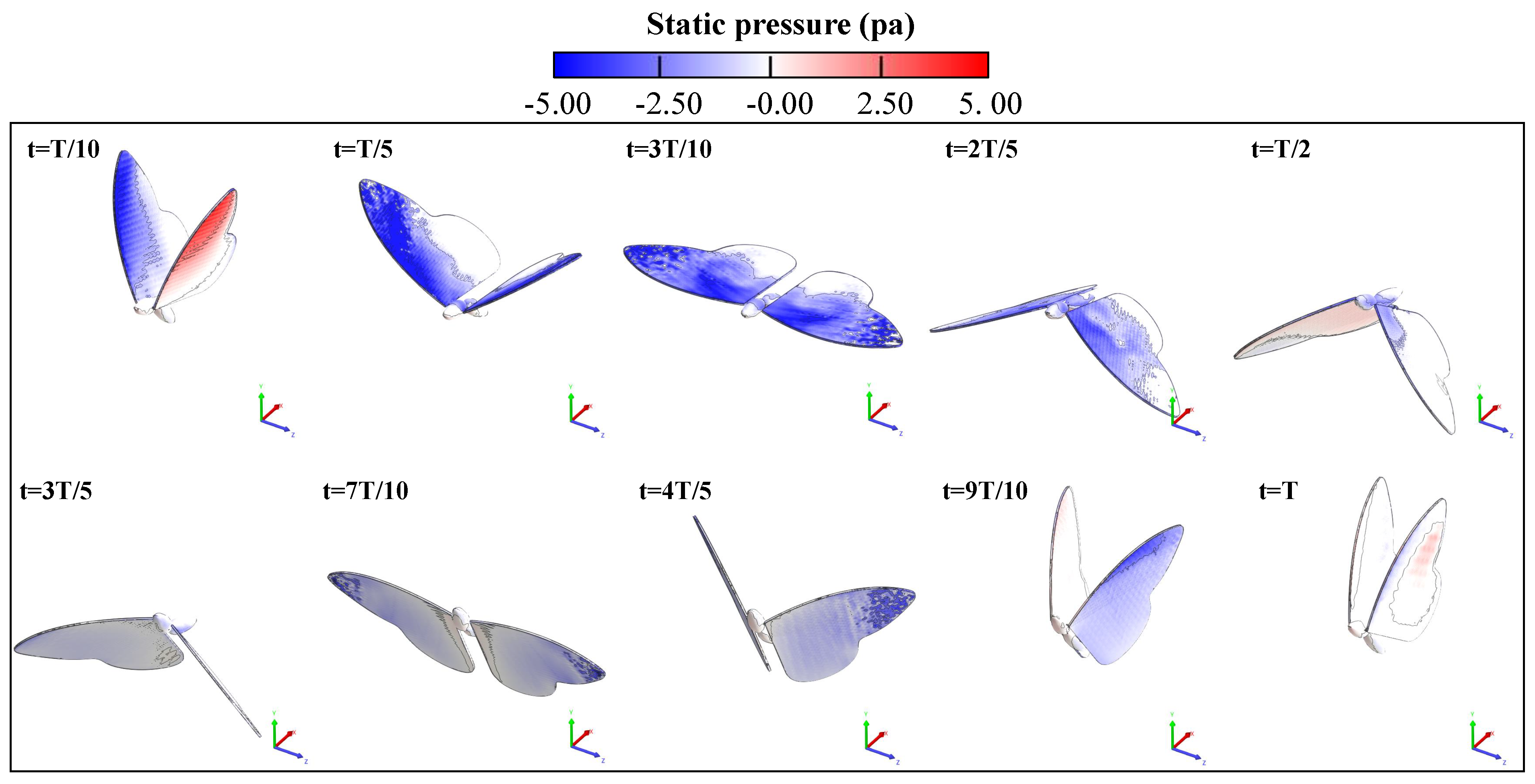
3.3.2. Surface Pressure Distribution
4. Discussion
5. Conclusions
Author Contributions
Funding
Informed Consent Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| CFD | Computational fluid dynamics |
| FW | Forewing |
| HW | Hindwing |
| COG | Center of gravity |
| COM | Center of mass |
| DOF | Degree of freedom |
| AR | Aspect ratio |
| LBM | Lattice Boltzmann method |
| DS | Downstroke |
| US | Upstroke |
| LEV | Leading-edge vortex |
| WTV | Wing-tip vortex |
| TEV | Trailing edge vortex |
| SFV | Secondary flow vortex |
References
- Brodsky, A.K. The Evolution of Insect Flight; Oxford University Press: Oxford, UK, 1994. [Google Scholar]
- Mao, S. Aerodynamics of insect flight. Adv. Mech. 2015, 45, 1–28. [Google Scholar]
- Wootton, R.J. Functional morphology of insect wings. Annu. Rev. Entomol. 1992, 37, 113–140. [Google Scholar] [CrossRef]
- Tanaka, H.; Shimoyama, I. Forward flight of swallowtail butterfly with simple flapping motion. Bioinspir. Biomim. 2010, 5, 026003. [Google Scholar] [CrossRef]
- Wootton, R.; Herbert, R.; Young, P.; Evans, K. Approaches to the structural modelling of insect wings. Philos. Trans. R. Soc. Lond. Ser. B Biol. Sci. 2003, 358, 1577–1587. [Google Scholar] [CrossRef]
- Bode-Oke, A.T.; Zeyghami, S.; Dong, H. Optimized Body Deformation in Dragonfly Maneuvers. arXiv 2017, arXiv:1707.07704. [Google Scholar]
- Ellington, C. The aerodynamics of hovering insect flight. III. Kinematics. Philos. Trans. R. Soc. Lond. Ser. B Biol. Sci. 1984, 305, 41–78. [Google Scholar]
- Dickinson, M.H.; Götz, K.G. The wake dynamics and flight forces of the fruit fly Drosophila melanogaster. J. Exp. Biol. 1996, 199, 2085–2104. [Google Scholar]
- Dickinson, M.H.; Lehmann, F.O.; Sane, S.P. Wing rotation and the aerodynamic basis of insect flight. Science 1999, 284, 1954–1960. [Google Scholar] [CrossRef]
- Dudley, R.; Srygley, R. Flight physiology of neotropical butterflies: allometry of airspeeds during natural free flight. J. Exp. Biol. 1994, 191, 125–139. [Google Scholar]
- Willmott, A.P.; Ellington, C.P. The mechanics of flight in the hawkmoth Manduca sexta. I. Kinematics of hovering and forward flight. J. Exp. Biol. 1997, 200, 2705–2722. [Google Scholar]
- Ellington, C.P. The aerodynamics of hovering insect flight. I. The quasi-steady analysis. Philos. Trans. R. Soc. Lond. Ser. B Biol. Sci. 1984, 305, 1–15. [Google Scholar]
- Ellington, C.P. The aerodynamics of hovering insect flight. II. Morphological parameters. Philos. Trans. R. Soc. Lond. Ser. B Biol. Sci. 1984, 305, 17–40. [Google Scholar]
- Ellington, C.P. The aerodynamics of hovering insect flight. VI. Lift and power requirements. Philos. Trans. R. Soc. Lond. Ser. B Biol. Sci. 1984, 305, 145–181. [Google Scholar]
- Cheng, X.; Sun, M. Wing-kinematics measurement and aerodynamics in a small insect in hovering flight. Sci. Rep. 2016, 6, 1–12. [Google Scholar] [CrossRef]
- Dao, T.T.; Loan Au, T.K.; Park, S.H.; Park, H.C. Effect of Wing Corrugation on the Aerodynamic Efficiency of Two-Dimensional Flapping Wings. Appl. Sci. 2020, 10, 7375. [Google Scholar] [CrossRef]
- Sane, S.P.; Dickinson, M.H. The aerodynamic effects of wing rotation and a revised quasi-steady model of flapping flight. J. Exp. Biol. 2002, 205, 1087–1096. [Google Scholar]
- Ellington, C. Unsteady aerodynamics of insect flight. Symp. Soc. Exp. Biol. 1995, 49, 109–129. [Google Scholar]
- Miller, L.A.; Peskin, C.S. Flexible clap and fling in tiny insect flight. J. Exp. Biol. 2009, 212, 3076–3090. [Google Scholar] [CrossRef]
- Sunada, S.; Kawachi, K.; Watanabe, I.; Azuma, A. Performance of a butterfly in take-off flight. J. Exp. Biol. 1993, 183, 249–277. [Google Scholar]
- Imura, T.; Fuchiwaki, M.; Tanaka, K. Dynamic Behaviors of Butterfly Wing and Their Application to Micro Flight Robot. In Proceedings of the Fluids Engineering Division Summer Meeting, Vail, CO, USA, 2–6 August 2009; Volume 43727, pp. 1687–1694. [Google Scholar]
- Jayakumar, J.; Senda, K.; Yokoyama, N. Control of Pitch Attitude by Abdomen during Forward Flight of Two-Dimensional Butterfly. J. Aircr. 2018, 55, 2327–2337. [Google Scholar] [CrossRef]
- Senda, K.; Obara, T.; Kitamura, M.; Nishikata, T.; Hirai, N.; Iima, M.; Yokoyama, N. Modeling and emergence of flapping flight of butterfly based on experimental measurements. Robot. Auton. Syst. 2012, 60, 670–678. [Google Scholar] [CrossRef]
- Srygley, R.; Thomas, A. Unconventional lift-generating mechanisms in free-flying butterflies. Nature 2002, 420, 660–664. [Google Scholar] [CrossRef]
- Okamoto, M.; Sunada, S.; Tokutake, H. Stability analysis of gliding flight of a swallowtail butterfly Papilio xuthus. J. Theor. Biol. 2009, 257, 191–202. [Google Scholar] [CrossRef]
- Bomphrey, R.J.; Taylor, G.K.; Thomas, A.L. Smoke visualization of free-flying bumblebees indicates independent leading-edge vortices on each wing pair. Exp. Fluids 2009, 46, 191–202. [Google Scholar] [CrossRef]
- Ke, X.; Zhang, W. Wing geometry and kinematic parameters optimization of flapping wing hovering flight. Appl. Sci. 2016, 6, 390. [Google Scholar] [CrossRef]
- Sridhar, M.; Kang, C.K.; Landrum, D.B. Beneficial Effect of the Coupled Wing-Body Dynamics on Power Consumption in Butterflies. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–11 January 2019; p. 0566. [Google Scholar]
- Senda, K.; Sawamoto, M.; Shibahara, T.; Tanaka, T. Study on flapping-of-wings flight of butterfly with experimental measurement. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference and Exhibit, Providence, RI, USA, 16–19 August 2004; p. 5368. [Google Scholar]
- Sridhar, M.; Kang, C.K.; Landrum, D.B. Instantaneous lift and motion characteristics of butterflies in free flight. In Proceedings of the 46th AIAA Fluid Dynamics Conference, Washington, DC, USA, 13–17 June 2016; p. 3252. [Google Scholar]
- Tang, H.; Lei, Y.; Li, X.; Fu, Y. Numerical Investigation of the Aerodynamic Characteristics and Attitude Stability of a Bio-Inspired Corrugated Airfoil for MAV or UAV Applications. Energies 2019, 12, 4021. [Google Scholar] [CrossRef]
- Triantafyllou, M.S.; Triantafyllou, G.S. An efficient swimming machine. Sci. Am. 1995, 272, 64–70. [Google Scholar] [CrossRef]
- Suzuki, K.; Minami, K.; Inamuro, T. Lift and thrust generation by a butterfly-like flapping wing–body model: Immersed boundary–lattice Boltzmann simulations. J. Fluid Mech. 2015, 767, 659–695. [Google Scholar] [CrossRef]
- Holman, D.M.; Brionnaud, R.; Martinez, F.; De Mier, M. Advanced aerodynamic analysis of the NASA high-lift trap wing with a moving flap configuration. In Proceedings of the 30th AIAA Applied Aerodynamics Conference, New Orleans, LA, USA, 25–28 June 2012; p. 2923. [Google Scholar]
- Povitsky, A. Modeling of Pitching and Plunging Airfoils in Proximity for Thrust Generation. In Proceedings of the 46th AIAA Fluid Dynamics Conference, Washington, DC, USA, 13–17 June 2016; p. 4340. [Google Scholar]
- Jiao, Z.; Zhao, L.; Shang, Y.; Sun, X. Generic analytical thrust-force model for flapping wings. AIAA J. 2018, 56, 581–593. [Google Scholar] [CrossRef]
- Liu, H.; Kawachi, K. A numerical study of insect flight. J. Comput. Phys. 1998, 146, 124–156. [Google Scholar] [CrossRef]
- Fuchiwaki, M.; Kuroki, T.; Tanaka, K.; Tababa, T. Dynamic behavior of the vortex ring formed on a butterfly wing. Exp. Fluids 2013, 54, 1–12. [Google Scholar] [CrossRef]
- Yokoyama, N.; Senda, K.; Iima, M.; Hirai, N. Aerodynamic forces and vortical structures in flapping butterfly’s forward flight. Phys. Fluids 2013, 25, 021902. [Google Scholar] [CrossRef]
- Fei, Y.H.J.; Yang, J.T. Importance of body rotation during the flight of a butterfly. Phys. Rev. E 2016, 93, 033124. [Google Scholar] [CrossRef] [PubMed]
- Wan, H.; Dong, H.; Gai, K. Computational investigation of cicada aerodynamics in forward flight. J. R. Soc. Interface 2015, 12, 20141116. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| m (kg) | 3.5 × 10 |
| (kg) | 1.02 × 10 |
| (kg) | 1.12 × 10 |
| (m) | 9.1 × 10 |
| (m) | 4.4 × 10 |
| (m) | 1.3 × 10 |
| (m) | 4.3 × 10 |
| (kg) | 5.2 × 10 |
| (m) | 8.29 × 10 |
| (m) | 2.57 × 10 |
| (N/m) | 1.36 |
| c (m) | 3.55 × 10 |
| Parameters | Description | Value |
|---|---|---|
| S (m) | Wingspan | 8.5 × |
| (m) | Wing-root offset | 1.5 × |
| c (m) | Chord length | 3.6 × |
| (m) | Thoracic length | 1.0 × |
| (m) | Abdominal length | 1.5 × |
| (m) | Wing thickness | 2.0 × |
| Parameters | s (Coarse) | s/2 (Medium) | s/4 (Fine) |
|---|---|---|---|
| Near wall (m) | 1.25 × | 6.25 × | 3.125 × |
| Far field (m) | 1.0 × | 5.0 × | 2.5 × |
| Elements at t = 0.1 s | 223,862 | 1,475,111 | 10,915,276 |
| ID | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| VC1 | 62.7 | 19.2 | 38.5 | −11.9 | −72.8 | −33.7 | 79.3 | 15.2 | 42.2 | −17.8 | −89.4 | −47.7 | 290 | 120 | 10.6 |
| VC2 | 59.1 | −0.1 | 29.2 | 13.3 | −46.9 | −13.8 | 89.7 | 23.5 | 60.8 | −17.3 | −88.6 | −42.2 | 297 | 135 | 9.9 |
| Parameters | Case 1 | Case 2 | Case 3 | Case 4 |
|---|---|---|---|---|
| f (Hz) | 10 | 10 | 10 | 10 |
| (deg.) | 60 | 60 | 60 | variable |
| (deg.) | 0 | 30 | 30 | 30 |
| (deg.) | 20 | 20 | 20 | 20 |
| (deg.) | variable | 34 | 34 | 34 |
| (deg.) | −35 | −35 | −35 | −35 |
| (rad) | variable | |||
| (m/s) | 1 | variable | 1 | 1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Wang, X.; Wang, S.; Huang, W.; Weng, Q. Kinematic and Aerodynamic Investigation of the Butterfly in Forward Free Flight for the Butterfly-Inspired Flapping Wing Air Vehicle. Appl. Sci. 2021, 11, 2620. https://doi.org/10.3390/app11062620
Zhang Y, Wang X, Wang S, Huang W, Weng Q. Kinematic and Aerodynamic Investigation of the Butterfly in Forward Free Flight for the Butterfly-Inspired Flapping Wing Air Vehicle. Applied Sciences. 2021; 11(6):2620. https://doi.org/10.3390/app11062620
Chicago/Turabian StyleZhang, Yixin, Xingjian Wang, Shaoping Wang, Wenhao Huang, and Qiwang Weng. 2021. "Kinematic and Aerodynamic Investigation of the Butterfly in Forward Free Flight for the Butterfly-Inspired Flapping Wing Air Vehicle" Applied Sciences 11, no. 6: 2620. https://doi.org/10.3390/app11062620
APA StyleZhang, Y., Wang, X., Wang, S., Huang, W., & Weng, Q. (2021). Kinematic and Aerodynamic Investigation of the Butterfly in Forward Free Flight for the Butterfly-Inspired Flapping Wing Air Vehicle. Applied Sciences, 11(6), 2620. https://doi.org/10.3390/app11062620