
Design and Development of a Climbing Robot for Wind Turbine Maintenance



Abstract
:1. Introduction
2. Materials and Methods
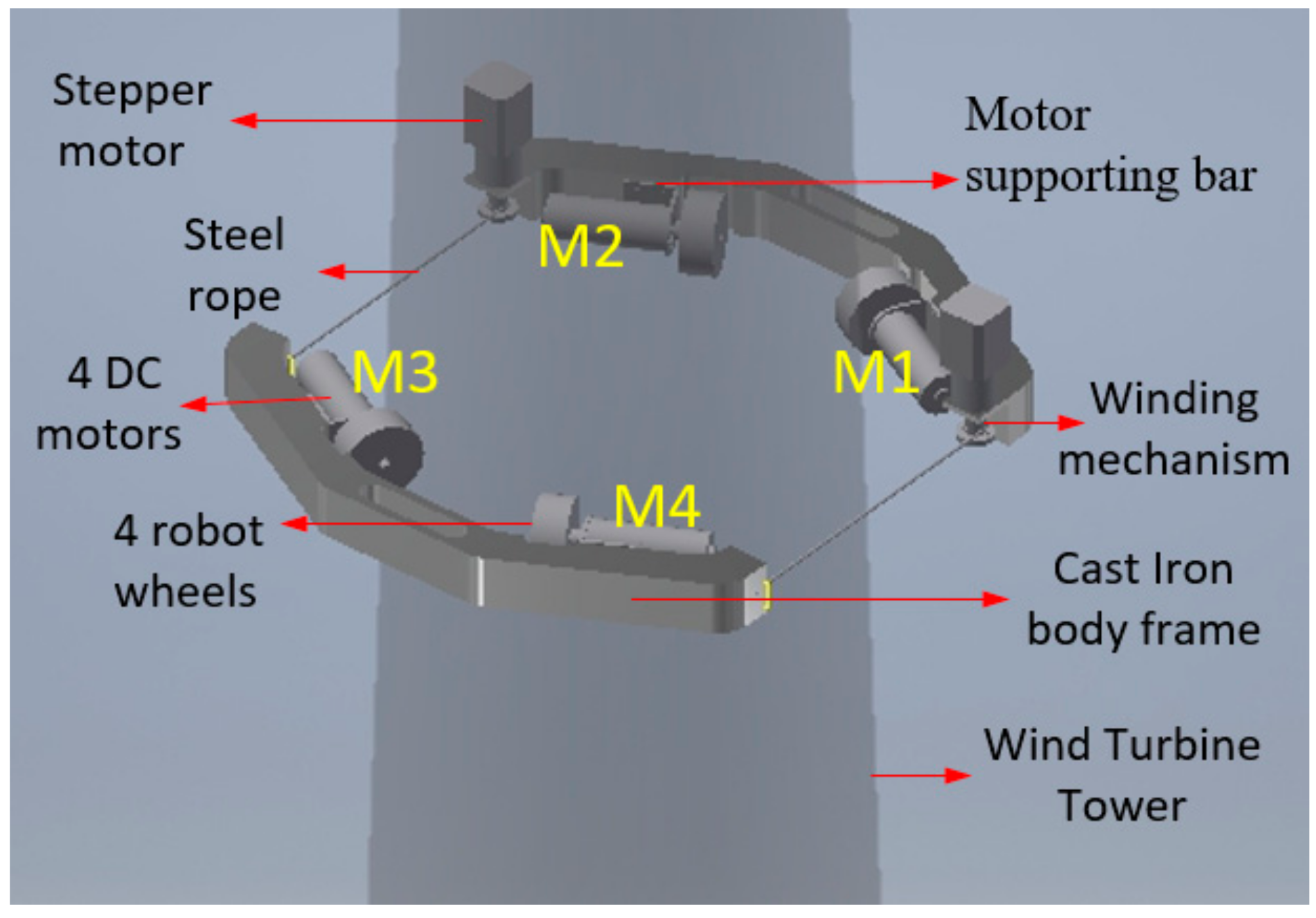
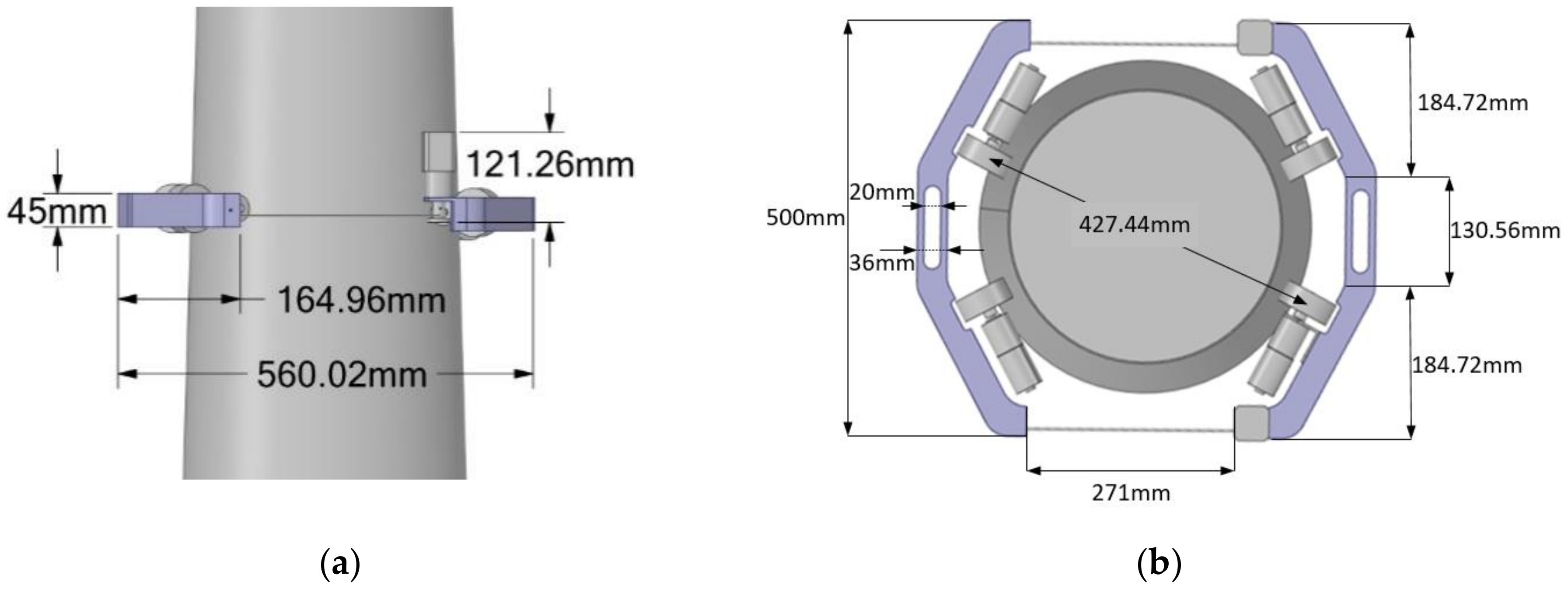
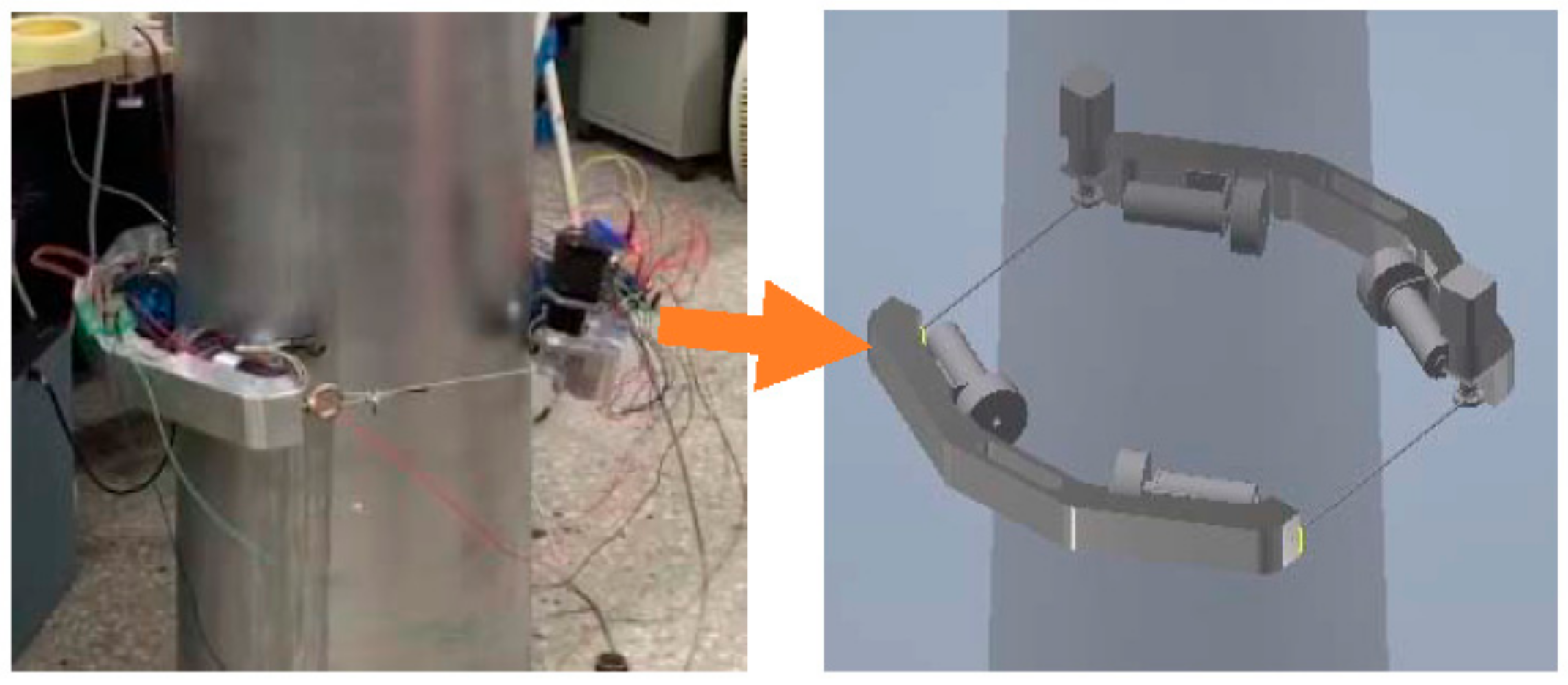
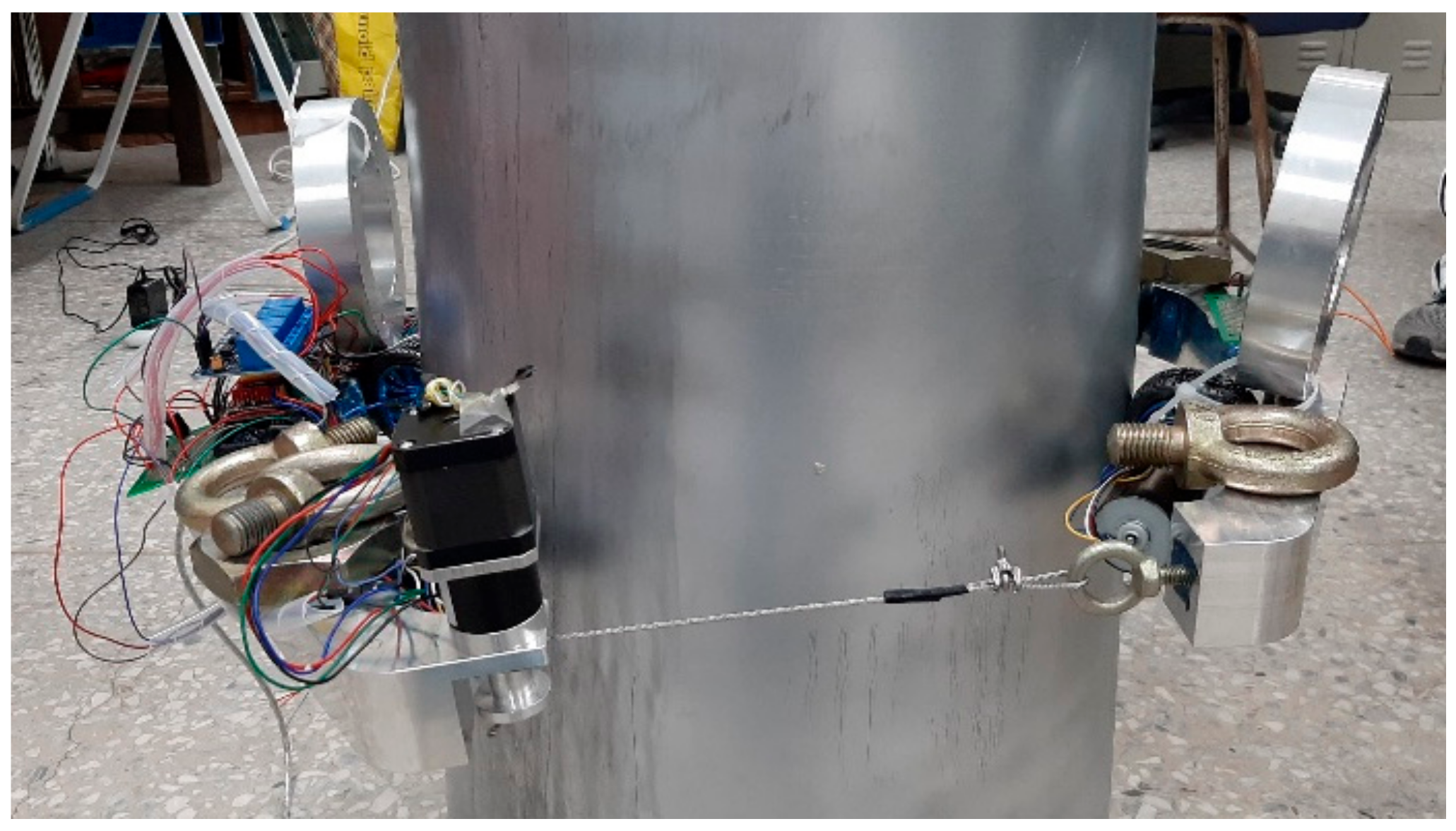
2.1. Climbing Robot Model Design
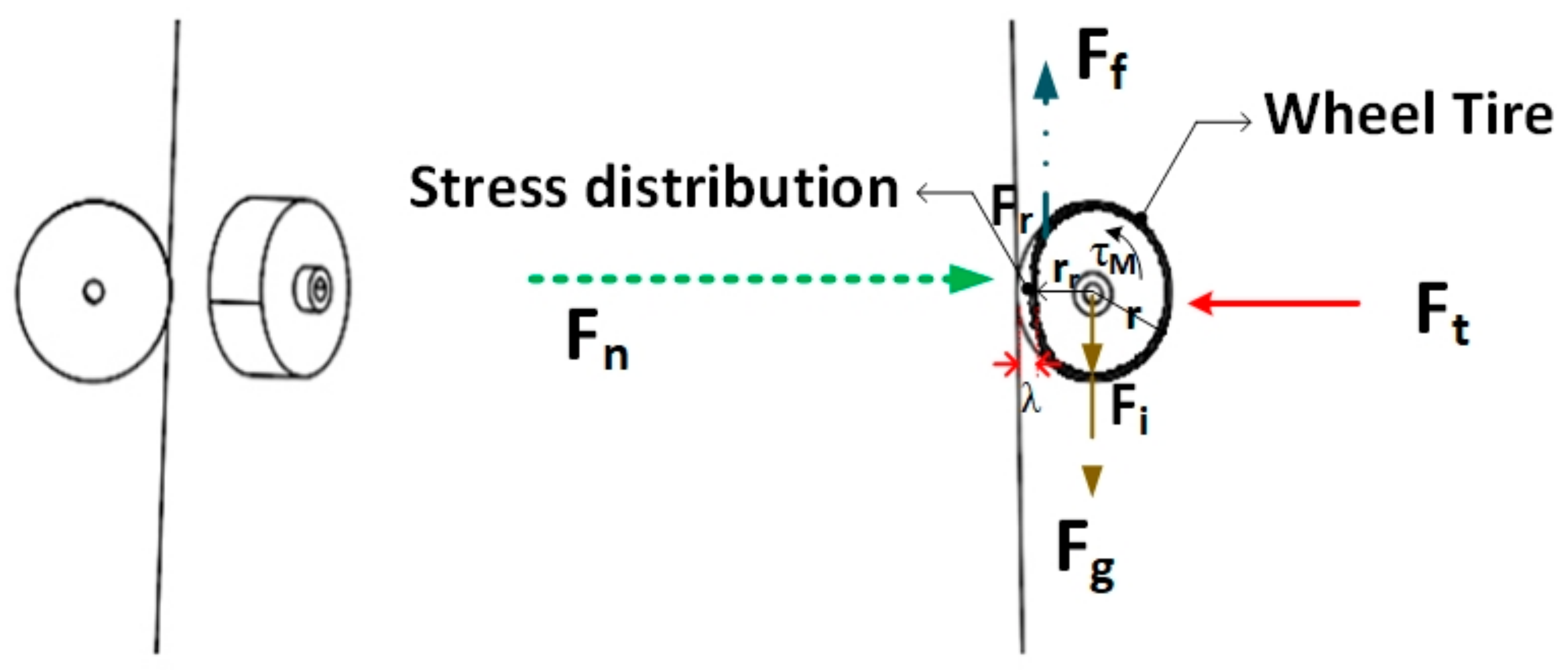
2.2. Force Analysis
2.3. Wind Turbine Tower Model Assumption
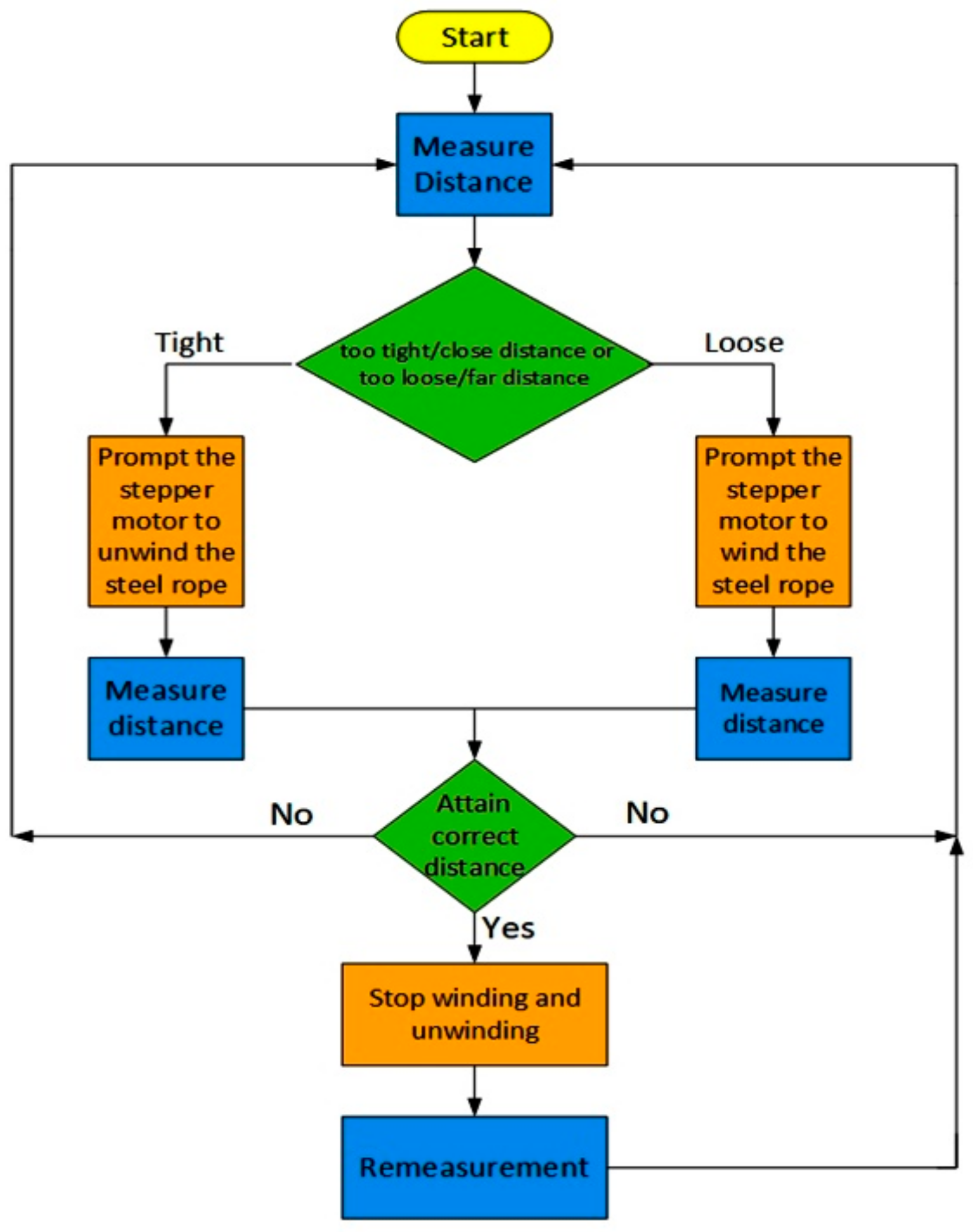
2.4. Controller Architecture
2.5. Winding Mechanism
3. Results and Discussions
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Rehfeld, K.; Wallasch, A.; Luers, S. Cost Situation of Onshore Wind Energy in Germany. Report by German Windguard. 2015. Available online: https://www.windguard.de/veroeffentlichungen.html (accessed on 13 May 2020).
- Tavakoli, M.; Viegas, C.; Marques, L.; Pires, J.N.; de Almeida, A.T. Omniclimbers: Omni-directional magnetic wheeled climbing robots for inspection of ferromagnetic structures. Robot. Auton. Syst. 2013, 61, 997–1007. [Google Scholar]
- Alkalla, M.G.; Fanni, M.A.; Mohamed, A.F.; Hashimoto, S. Tele-operated propeller-type climbing robot for inspection of petrochemical vessels. Ind. Robot: Int. J. 2017, 44, 166–177. [Google Scholar]
- Zhang, H.X.; Zhang, J.W.; Zong, G.H.; Wang, W.; Liu, R. Sky Cleaner 3: A real pneumatic climbing robot for glass-wall cleaning. IEEE Mag. Robot. Autom. 2006, 13, 32–41. [Google Scholar]
- Wang, W.; Wang, K.; Zong, G.H.; Li, D.Z. Principle and experiment of vibrating suction method for wall-climbing robot. Vacuum 2010, 85, 107–112. [Google Scholar]
- Koo, I.M.; Tran, D.T.; Lee, Y.H.; Moon, H.; Song, Y.K.; Choi, H.R. Development of Wall Climbing Robot System by Using Impeller TypeAdhesion Mechanism. J. Intell. Robot. Syst. 2013, 72, 57–72. [Google Scholar]
- Asbeck, A.T.; Cutkosky, M.R. Designing compliant spine mechanisms for climbing. J. Mech. Robot. 2012, 4, 031007. [Google Scholar]
- Guan, Y.; Zhu, H.; Wu, W.; Zhou, X.; Jiang, L.; Cai, C.; Zhang, L.; Zhang, H. A modular biped wall-climbing robot with high mobility and manipulating function. IEEE/ASME Trans. Mechatron. 2013, 18, 1787–1798. [Google Scholar]
- Lam, T.L.; Xu, Y. Climbing strategy for a flexible tree climbing robot–treebot. IEEE Trans. Robot. 2011, 27, 1107–1117. [Google Scholar]
- Koh, K.H.; Sreekumar, M.; Ponnambalam, S.G. Hide details Hybrid electrostatic and elastomer adhesion mechanism for wall climbing robot. Mechatronics 2016, 35, 122–135. [Google Scholar]
- Liu, R.; Chen, R.; Shen, H.; Zhang, R. Wall climbing robot using electrostatic adhesion force generated by flexible interdigital electrodes. Int. J. Adv. Robot. Syst. 2013, 10, 36. [Google Scholar]
- Beardsley, P. VertiGo a Wall-Climbing Robot Including Ground-Wall Transition. 2015. Available online: www.disneyresearch.com/publication/vertigo/ (accessed on 29 December 2015).
- Schmidt, D.; Berns, K. Climbing robots for maintenance and inspections of vertical structures–a survey of design aspects and technologies. Robot. Auton. Syst. 2013, 61, 1288–1305. [Google Scholar]
- Chu, B.; Jung, K.; Han, C.S.; Hong, D. A survey of climbing robots: Locomotion and adhesion. Int. J. Precis. Eng. Manuf. 2010, 11, 633–647. [Google Scholar]
- Xu, F.Y.; Wang, X.S.; Jiang, G.P. Design Method and Analysis for Wall-climbing Robot based on Hooked-claws. Int. J. Adv. Robot. Syst. 2012, 9, 1–12. [Google Scholar]
- Sattar, T.P.; Rodriguez, H.L. Climbing ring robot for inspection of offshore wind turbines. Ind. Robot Int. J. 2009, 36, 326–330. [Google Scholar]
- Fauroux, J.-C.; Morillon, J. Design of a climbing robot for cylindro-conic poles based on rolling self-locking. Ind. Robot Int. J. 2010, 37, 287–292. [Google Scholar]
- Yazdani, B.; Ahmadabadi, M.N.; Harati, A.; Moaveni, H.; Soltani, N. Design and development of a pole climbing robot mechanism. In Proceedings of the Mechatronics and Robotics, Aachen, Germany, 13–15 September 2004. [Google Scholar]
- Baghani, A.; Ahmadabadi, M.N.; Harati, A. Kinematics Modeling of a Wheel-Based Pole Climbing Robot (UT-PCR). In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Barcelona, Spain, 18–22 April 2005; pp. 2099–2104. [Google Scholar]
- Gui, P.; Tang, L.; Mukhopadhyay, S. A Novel Robotic Tree Climbing Mechanism with Anti-Falling Functionality for Tree Pruning. J. Mech. Robot. 2018, 10, 014502. [Google Scholar]
- Gui, P.; Tang, L.; Mukhopadhyay, S. A Novel Design of Anti-falling Mechanism for Tree Pruning Robot. In Proceedings of the IEEE 10th Conference on Industrial Electronics and Applications (ICIEA), Auckland, New Zealand, 15–17 June 2015; pp. 812–816. [Google Scholar] [CrossRef]
- Urdaneta, M.; Garcia, C.; Poletti, G.; Ejarque, G.; Saltaren, R.; Aracil, R. Development of a novel autonomous robot for navigation and inspect in oil wells. CEAL 2012, 14, 9–14. [Google Scholar]
- Franko, J.; Du, S.; Kallweit, S.; Duelberg, E.; Engemann, H. Design of a Multi-Robot System for Wind Turbine Maintenance. Energies 2020, 13, 2552. [Google Scholar]
- Xiong, Y.; Tuononen, A. Rolling deformation of truck tires: Measurement and analysis using a tire sensing approach. J. Terramech. 2015, 61, 33–42. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
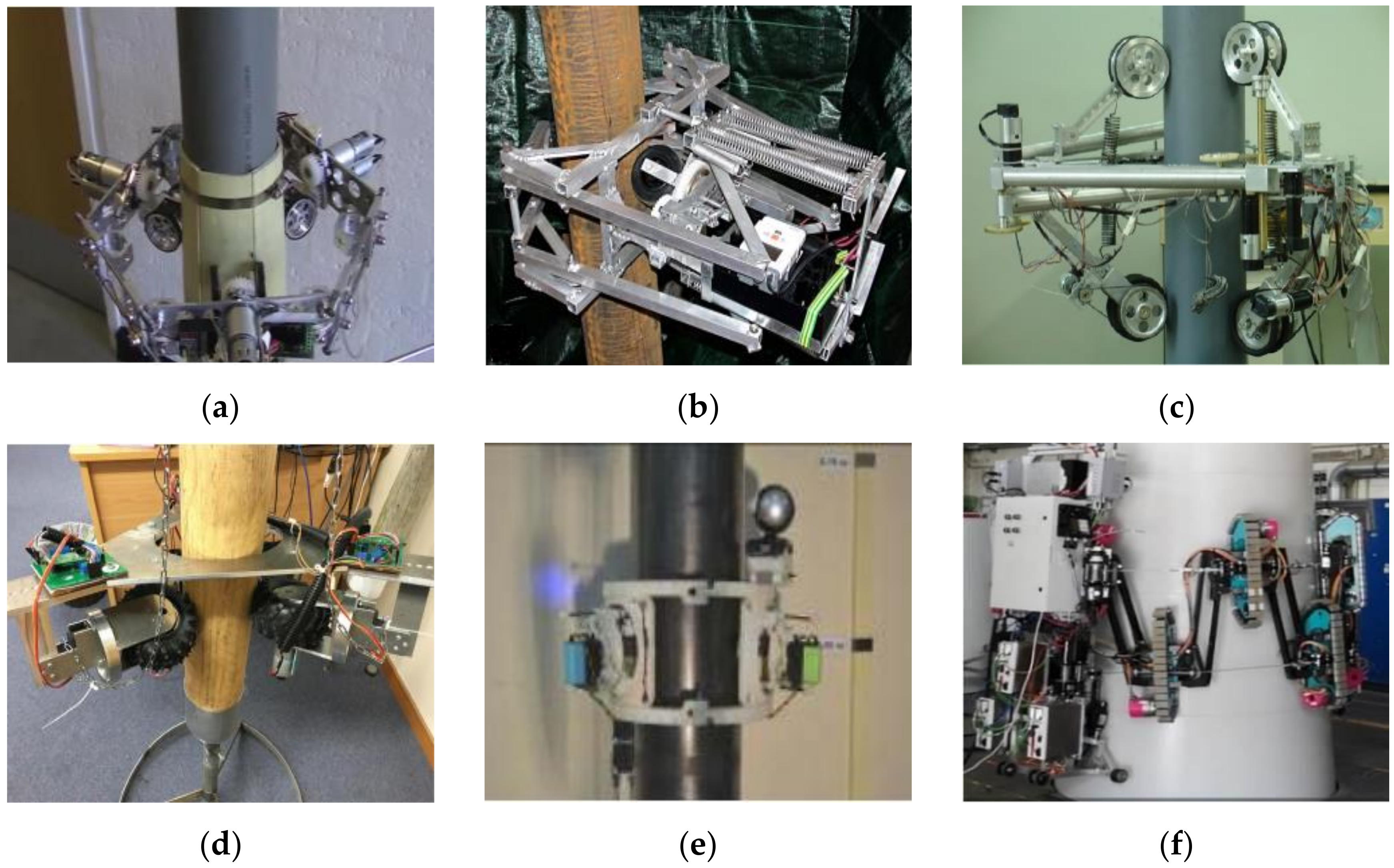
| Types of Climbing Robot | Locomotion | Adhesion | Structural Design | Application | Weight | Diameter of the Application (Pole, Tower, Tree, Pipelines) |
|---|---|---|---|---|---|---|
| ”Ring” Climb Robot [16] | Wheel based | Mechanical—spring traction | “Ring” robot in trisection Y-type design | Cylindrical tower | 3 kg | 100 mm |
| Pobot V2 [17] | Wheel based | Mechanical—static self-locking | Rectangular body and folded shape of arm | Conical pole | 10.5 kg | 300–100 mm |
| The UT-PCR [18,19] | Wheel based | Mechanical—spring traction | Triangular body and 6 limbs | Conical pole | N/A | 80 mm |
| Tree Pruning Robot [20,21] | Wheel based | Mechanical—stepper and screw nut unit | Active and passive Anti-falling platform and 3 legs | Tree trunk | 5.32 kg | 100 mm |
| The RETOV [22] | Wheel based | Magnetic—micro motors | Two articulated rings and 3 drive wheel system | Pipelines | 1 kg | 220 mm |
| Multi-Robot [23] | Track based | Mechanical—tension straps | Tracked vehicle design and tracked drive chassis frame | Wind turbines | 400 kg | 3–4 m |
| Turbine Description: 2.0 MW Turbine from Vestas V80. Tower Material: Steel | ||||
|---|---|---|---|---|
| Dtop (mm) | Dbottom (mm) | Tower Height (mm) | ||
| Original Tower Dimension | Top Section | 2314 | 2822 | 28,990 |
| Middle Section | 2822 | 3488 | 29,005 | |
| Third Section | 3488 | 4186 | 17,660 | |
| Scaled-Down Tower | 330 | 400 | 1200 | |
| Inclination Angle | 1.67° | |||
| Parameters | Actual Values | ||
|---|---|---|---|
| Robot weight | Body frame weight | 8.2 kg | 2 kg × 2 = 4 kg |
| Motors, electronic modules | 4.2 kg | ||
| Max payload weight | 4.4 kg | ||
| Average speed | 120 mm/s | ||
| Current | 1.4 A | ||
| Torque of the climbing robot | 0.78 Nm | ||
| Tension force of the rope | 81.9 N | ||
| DC Motor −12 V/24 V GP-BLDC3650 | Series Hybrid Stepper Motors-42HS03 | |
|---|---|---|
| Shaft length: | 20 mm | 48 mm |
| Shaft diameter: | 8 mm D-shaped shaft | - |
| Voltage: | 12 V | 12 V |
| Current: | 1.8 A | 1.4 A |
| Weight: | 445 g | 350 g |
| Torque: | 1.5 kg.cm | 0.204 kg.cm |
| Working speed | 70–150 rpm | - |
| Holding Torque | - | 0.47 Nm |
| Detent torque | - | 0.204 kg.cm/0.020 Nm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, J.-H.; Padrigalan, K. Design and Development of a Climbing Robot for Wind Turbine Maintenance. Appl. Sci. 2021, 11, 2328. https://doi.org/10.3390/app11052328
Liu J-H, Padrigalan K. Design and Development of a Climbing Robot for Wind Turbine Maintenance. Applied Sciences. 2021; 11(5):2328. https://doi.org/10.3390/app11052328
Chicago/Turabian StyleLiu, Jui-Hung, and Kathleen Padrigalan. 2021. "Design and Development of a Climbing Robot for Wind Turbine Maintenance" Applied Sciences 11, no. 5: 2328. https://doi.org/10.3390/app11052328
APA StyleLiu, J.-H., & Padrigalan, K. (2021). Design and Development of a Climbing Robot for Wind Turbine Maintenance. Applied Sciences, 11(5), 2328. https://doi.org/10.3390/app11052328