Gazing Characteristics of a Driver during Vehicle Backing


Abstract
1. Introduction
2. Materials and Methods
2.1. Volunteers for Driver
2.2. Test Vehicle
2.3. Parking Area
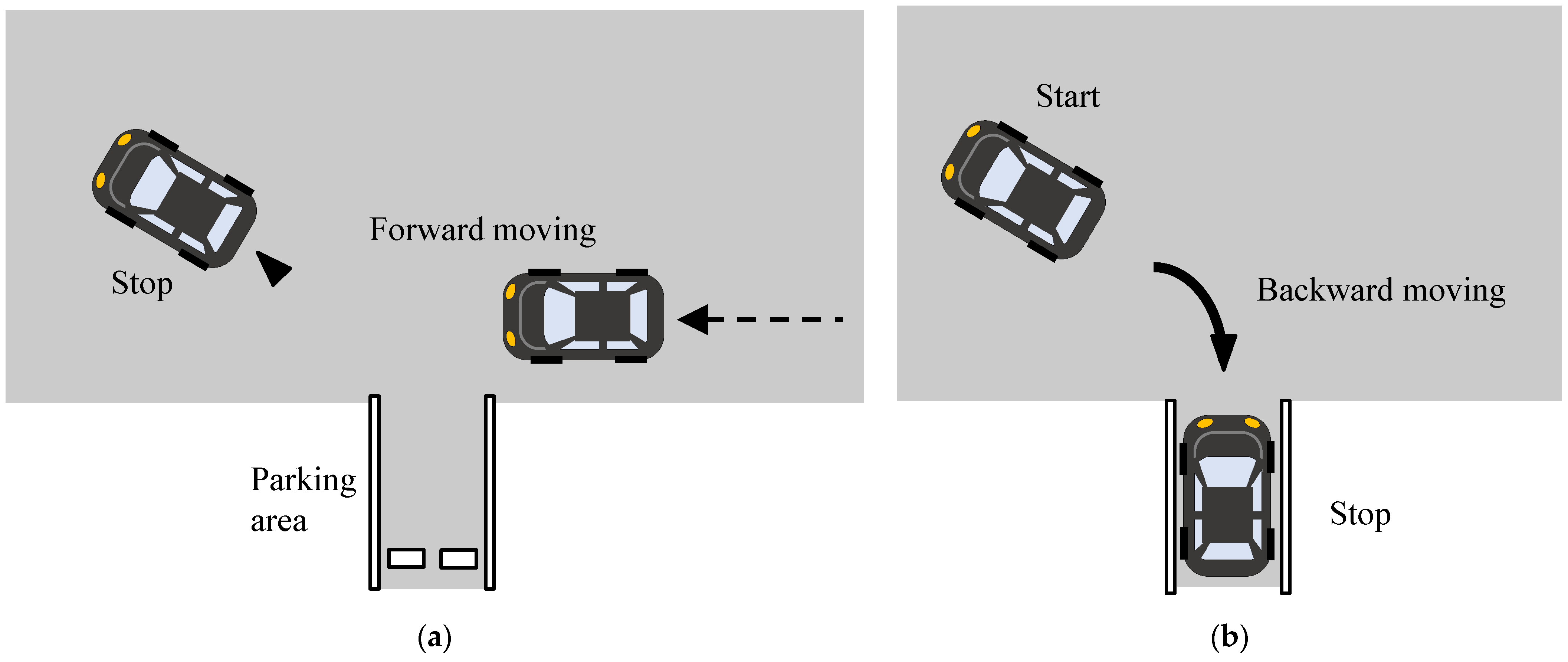
2.4. Experimental Backing Procedure
2.5. Drivers’ Gaze in the Area of Interest
- Significant difference in the average gazing time of all the subjects in each AOI in the given technology between the start and stop phases.
- Significant difference in the AOI usage rate in the given technology between the start and stop phases.
- Significant difference in the average gazing time of all the subjects between the two given technologies for the start phase.
- Significant difference in the average gazing time of all the subjects between the two given technologies for the stop phase.
3. Results
4. Discussion
5. Conclusions
- In the comparison between NT-V and S-V, the results indicated that the average total gazing time of each mirror was similar, and there was no significant difference between them for the start phase and stop phase. The same trend was seen in the comparison between BC-V and BCS-V. Thus, the gazing time during backing maneuvers was not influenced by the presence or absence of sonars.
- For the start phase, the average gazing time of the left-side mirror was the longest among the AOIs when drivers drove all types of vehicle technologies. For the stop phase, when drivers drove a vehicle without a backup camera (NT-V and S-V), the gazing time on the right-side mirror was the longest, and when they drove vehicles with a backup camera (BC-V and BCS-V), the gazing time on the monitor was the longest among the AOIs.
- For the start phase, there were no significant differences in the total gazing time of all AOIs in the four technologies. For the stop phase, however, the total gazing time of all AOIs for the vehicle with a backup camera (BC-V and BCS-V) was significantly longer than that of the vehicle without a backup camera (NT-V and S-V) owing to the increase in the gazing time of the monitor.
- The results obtained from the present experiments can contribute to the development of a vehicle camera system that combines the left- and right-side mirror cameras and the rear camera into one screen.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Annual Traffic Accident Report in 2019; Institute for Traffic Accident Research and Data Analysis of Japan (ITARDA): Tokyo, Japan, 2020. (In Japanese)
- Japan Automobile Standards Internationalization Center (JASIC). Test for protection of heads and legs of pedestrians, TRIAS18-J099(2)-01. In Automobile Type Approval Handbook for Japanese Certification; JASIC: Tokyo, Japan, 2013. [Google Scholar]
- Matsui, Y.; Tanahashi, M. Development of JAMA—JARI pedestrian headform impactor in compliance with ISO and IHRA standards. Int. J. Crashworthiness 2014, 9, 129–139. [Google Scholar] [CrossRef]
- Matsui, Y. Safety assessment characteristics of pedestrian legform impactors in vehicle-front impact tests. Accid. Anal. Prev. 2014, 73, 65–72. [Google Scholar] [CrossRef] [PubMed]
- Mizuno, K.; Ueyama, T.; Nakane, D.; Wanami, S. Comparison of responses of the Flex-PLI and TRL legform impactors in pedestrian tests. SAE Int. J. Passeng. Cars–Mech. Syst. 2012, 5, 203–213. [Google Scholar] [CrossRef]
- Matsui, Y. New injury reference values determined by TRL legform impactor from accident reconstruction test. Int. J. Crashworthiness 2003, 8, 179–188. [Google Scholar] [CrossRef]
- Matsui, Y. Biofidelity of TRL legform impactor and injury tolerance of human leg in lateral impact. Stapp Car Crash J. 2001, 45, 495–510. [Google Scholar] [PubMed]
- Japan Automobile Standards Internationalization Center (JASIC). Test for advanced emergency braking systems of passenger motor vehicle, etc., TRIAS12-R152-01. In Automobile Type Approval Handbook for Japanese Certification; JASIC: Tokyo, Japan, 1999; Available online: https://www.jasic.org/e/index_e.htm (accessed on 10 February 2021).
- Matsui, Y.; Oikawa, S.; Ando, K. Risks of pedestrian serious injuries and fatalities associated with impact velocities of cars in car-versus-pedestrian accidents in Japan. Stapp Car. Crash J. 2013, 57, 201–217. [Google Scholar]
- Shibata, E. Development of driving assist system “EyeSight” by new stereo camera. J. Soc. Automot. Eng. Jpn. 2009, 63, 93–98. (In Japanese) [Google Scholar]
- Kuzumaki, S. Our approach to a safe sustainable society. J. Soc. Automot. Eng. Jpn. 2009, 63, 11–19. (In Japanese) [Google Scholar]
- Sekiguchi, M. Introduction of SUBARU advanced driving system “EyeSight ver.2”. In Proceedings of the Safety Engineering Symposium, Tokyo, Japan, 7 July 2011; The Japan Society of Mechanical Engineers: Tokyo, Japan, 2011. (In Japanese). [Google Scholar]
- Makabe, S. Active safety system new eyesight version 2. J. Soc. Automot. Eng. Jpn. 2012, 66, 88–93. (In Japanese) [Google Scholar]
- Chung, E.; Jung, H.; Lee, I. Vehicle detection algorithm for lane change decision aid system. In SAE Technical Paper 2006–01–0570; SAE: Detroit, MI, USA, 2006. [Google Scholar] [CrossRef]
- Tsuji, M.; Yamada, K.; Koreishi, J. The obstacle warning system in adjacent rear area. IEICE PRMU 1997, 97, 33–38. (In Japanese) [Google Scholar]
- Matsui, Y.; Oikawa, S. Situational characteristics of fatal pedestrian accidents involving vehicles traveling at low speeds in Japan. Traffic Inj. Prev. 2019, 20, S1–S6. [Google Scholar] [CrossRef]
- Matsui, Y.; Hosokawa, N.; Oikawa, S. Pedestrian detection during vehicle backing maneuvers using ultrasonic parking sensors. Stapp. Car Crash J. 2019, 63, 343–358. [Google Scholar]
- Maciej, J.; Vollrath, M. Comparison of manual vs. speech-based interaction with in-vehicle information systems. Accid. Anal. Prev. 2009, 41, 924–930. [Google Scholar] [CrossRef]
- Shahar, A.; Loon, E.; Clarke, D.; Crundall, D. Attending overtaking cars and motorcycles through the mirrors before changing lanes. Accid. Anal. Prev. 2012, 44, 104–110. [Google Scholar] [CrossRef] [PubMed]
- Lehtonen, E.; Lappi, O.; Koskiahde, N.; Mansikka, T.; Hietamäki, J.; Summal, H. Gaze doesn’t always lead steering. Accid. Anal. Prev. 2018, 121, 268–278. [Google Scholar] [CrossRef]
- Gaspar, J.; Ward, N.; Neider, M.; Crowell, J.; Carbonari, R.; Kaczmarski, H.; Ringer, R.; Johnson, A.; Kramer, A.; Loschky, L. Measuring the useful field of view during simulated driving with gaze-contingent displays. Hum. Factors 2016, 58, 630–641. [Google Scholar] [CrossRef]
- Petermeijera, S.; Cielerb, S.; Winter, J. Comparing spatially static and dynamic vibrotactile take-overrequests in the driver seat. Accid. Anal. Prev. 2017, 99, 218–227. [Google Scholar] [CrossRef] [PubMed]
- Lemonnier, S.; Brémond, R.; Baccino, T. Gaze behavior when approaching an intersection: Dwell time distribution and comparison with a quantitative predictions. Transp. Res. Part F Traffic Psych. Behav. 2015, 35, 60–74. [Google Scholar] [CrossRef]
- Sun, Q.; Xia, J.; He, J.; Foster, J.; Falkmer, T.; Lee, H. Towards unpacking older drivers’ visual-motor coordination: A gaze-based integrated driving assessment. Accid. Anal. Prev. 2018, 113, 85–96. [Google Scholar] [CrossRef] [PubMed]
- Hergeth, S.; Lorenz, L.; Vilimek, R.; Krems, J. Keep your scanners peeled: Gaze behavior as a measure of automation trust during highly automated driving. Hum. Factors 2016, 58, 509–519. [Google Scholar] [CrossRef] [PubMed]
- Tanikawa, Y.; Oikawa, S.; Hirose, T. Head-up display with distance information evaluated using a driving simulator. In Proceedings of the 5th International Symposium on Future Active Safety Technology toward Zero Accidents (FAST-zero ‘19), Blacksburg, VA, USA, 9–11 September 2019. [Google Scholar]
- Li, X.; Vaezipour, A.; Rakotonirainy, A.; Demmel, S. Effects of an in-vehicle eco-safe driving system on drivers’ glance behaviour. Accid. Anal. Prev. 2019, 122, 143–152. [Google Scholar] [CrossRef] [PubMed]
- Kountouriotis, G.; Spyridakos, P.; Carsten, O.; Merat, N. Identifying cognitive distraction using steering wheel reversal rates. Accid. Anal. Prev. 2016, 96, 39–45. [Google Scholar] [CrossRef] [PubMed]
- Hirasawa, T.; Kamei, J.; Aki, M.; Koga, T.; Suda, Y. Basic study of parking ITS for functional design of parking spaces. Ind. Sci. 2012, 64, 161–166. (In Japanese) [Google Scholar]
- International Organization for Standardization (ISO) ISO 17386 Transport Information and Control Systems–Manoeuvring Aids for Low Speed Operation (MALSO); Performance Requirements and Test Procedures: Geneva, Switzerland, 2010.
- Tobii Technology, Tobii Pro Glasses 2 Product Description. 2018. Available online: https://www.tobiipro.com/siteassets/tobii-pro/product-descriptions/tobii-pro-glasses-2-product-description.pdf (accessed on 10 February 2021).
- Tobii Technology, Tobii Pro Glasses 2 User‘s Manual. 2016. Available online: https://www.tobiipro.com/siteassets/tobii-pro/user-manuals/tobii-pro-glasses-2-user-manual.pdf (accessed on 10 February 2021).
- Study on Facility Operation to Improve Safety for Reduction of Traffic Ain Parking Lots; Tokyo Metropolitan Public Corporation for Road Improvement and Management (TMPC): Tokyo, Japan, 2018. (In Japanese)
- National Highway Traffic Safety Administration (NHTSA) Laboratory test procedure for FMVSS 111 Rear Visibility. Washington. Available online: https://www.nhtsa.gov/sites/nhtsa.dot.gov/files/documents/tp-111-v01-final_tag.pdf (accessed on 10 February 2021).
- Toyota Motor Corporation. Lexus Digital Side-View Monitor Debuts on the New ES. 2018. Available online: https://global.toyota/en/newsroom/lexus/24544476.html (accessed on 10 February 2021).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| AOI | Gaze Time for Start Phase (s) | Gaze Time for Stop Phase (s) | p-Value | |||
|---|---|---|---|---|---|---|
| Average | SD | Average | SD | |||
| 1. No-tech vehicle (NT-V) | ||||||
| Rearview mirror | 0.33 | 0.50 | 0.10 | 0.29 | 0.161 | |
| Left-side mirror | 5.57 | 2.80 | 2.32 | 2.29 | 0.002 ** | |
| Right-side mirror | 0.78 | 0.86 | 5.06 | 3.08 | <0.001 ** | |
| Total of all AOIs | 6.67 | 2.99 | 7.48 | 4.47 | 0.580 | |
| 2. Sonar vehicle (S-V) | ||||||
| Rearview mirror | 0.21 | 0.31 | 0.04 | 0.14 | 0.080 | |
| Left-side mirror | 5.49 | 2.39 | 2.54 | 2.36 | 0.003 ** | |
| Right-side mirror | 0.54 | 0.67 | 4.57 | 2.97 | <0.001 ** | |
| Total of all AOIs | 6.24 | 2.66 | 7.15 | 3.81 | 0.469 | |
| 3. Backup-camera vehicle (BC-V) | ||||||
| Monitor | 2.89 | 3.08 | 9.70 | 4.44 | <0.001 ** | |
| Rearview mirror | 0.03 | 0.08 | 0.00 | 0.00 | - | |
| Left-side mirror | 3.37 | 2.74 | 1.10 | 1.37 | 0.145 | |
| Right-side mirror | 0.49 | 0.57 | 2.32 | 1.95 | 0.004 ** | |
| Total of all AOIs | 6.79 | 3.03 | 13.12 | 4.35 | <0.001 ** | |
| 4. Backup-camera with sonar vehicle (BCS-V) | ||||||
| Monitor | 2.15 | 2.14 | 8.44 | 3.35 | <0.001 ** | |
| Rearview mirror | 0.07 | 0.24 | 0.01 | 0.04 | 0.353 | |
| Left-side mirror | 3.85 | 2.46 | 1.31 | 1.53 | 0.003 ** | |
| Right-side mirror | 0.30 | 0.39 | 2.13 | 1.54 | 0.001 ** | |
| Total of all AOIs | 6.37 | 2.85 | 11.89 | 3.10 | <0.001 ** | |
| AOI | Start Phase | Stop Phase | p-Value | |||
|---|---|---|---|---|---|---|
| Number of Volunteers Who Used the AOI | AOI Usage Rate (%) | Number of Volunteers Who Used the AOI | AOI Usage Rate (%) | |||
| 1. No-tech vehicle (NT-V) | ||||||
| Rearview mirror | 7 | 50 | 4 | 29 | 0.246 | |
| Left-side mirror | 14 | 100 | 14 | 100 | - | |
| Right-side mirror | 9 | 64 | 13 | 93 | 0.065 | |
| 2. Sonar vehicle (S-V) | ||||||
| Rearview mirror | 6 | 43 | 2 | 14 | 0.094 | |
| Left-side mirror | 14 | 100 | 13 | 93 | 0.309 | |
| Right-side mirror | 8 | 57 | 14 | 100 | 0.006 ** | |
| 3. Backup-camera vehicle (BC-V) | ||||||
| Monitor | 10 | 71 | 14 | 100 | 0.031 * | |
| Rearview mirror | 2 | 14 | 0 | 0 | 0.142 | |
| Left-side mirror | 13 | 93 | 10 | 71 | 0.139 | |
| Right-side mirror | 9 | 64 | 11 | 79 | 0.403 | |
| 4. Backup-camera with sonar vehicle (BCS-V) | ||||||
| Monitor | 11 | 79 | 14 | 100 | 0.067 | |
| Rearview mirror | 2 | 14 | 1 | 7 | 0.541 | |
| Left-side mirror | 13 | 93 | 11 | 79 | 0.280 | |
| Right-side mirror | 8 | 57 | 13 | 93 | 0.029 * | |
| Com-Parison | AOI | Vehicle Technology | Gaze Time (s) | Vehicle Technology | Gaze Time (s) | p-Value | ||
|---|---|---|---|---|---|---|---|---|
| Average | SD | Average | SD | |||||
| No.1 | Rearview mirror | 1. No-tech vehicle (NT-V) | 0.33 | 0.50 | 2. Sonar vehicle (S-V) | 0.21 | 0.31 | 0.459 |
| Left-side mirror | 5.57 | 2.80 | 5.49 | 2.39 | 0.937 | |||
| Right-side mirror | 0.78 | 0.86 | 0.54 | 0.67 | 0.421 | |||
| Total of all AOIs | 6.67 | 2.99 | 6.24 | 2.66 | 0.689 | |||
| No.2 | Monitor | 1. No-tech vehicle (NT-V) | - | - | 3. Backup-camera vehicle (BC-V) | 2.89 | 3.08 | - |
| Rearview mirror | 0.33 | 0.50 | 0.03 | 0.08 | 0.047 * | |||
| Left-side mirror | 5.57 | 2.80 | 3.37 | 2.74 | 0.046 * | |||
| Right-side mirror | 0.78 | 0.86 | 0.49 | 0.57 | 0.304 | |||
| Total of all AOIs | 6.67 | 2.99 | 6.79 | 3.03 | 0.921 | |||
| No.3 | Monitor | 1. No-tech vehicle (NT-V) | - | - | 4. Backup-camera with sonar vehicle (BCS-V) | 2.15 | 2.14 | - |
| Rearview mirror | 0.33 | 0.50 | 0.07 | 0.24 | 0.103 | |||
| Left-side mirror | 5.57 | 2.80 | 3.85 | 2.46 | 0.098 | |||
| Right-side mirror | 0.78 | 0.86 | 0.30 | 0.39 | 0.071 | |||
| Total of all AOIs | 6.67 | 2.99 | 6.37 | 2.85 | 0.786 | |||
| No.4 | Monitor | 2. Sonar vehicle (S-V) | - | - | 3. Backup-camera vehicle (BC-V) | 2.89 | 3.08 | - |
| Rearview mirror | 0.21 | 0.31 | 0.03 | 0.08 | 0.052 | |||
| Left-side mirror | 5.49 | 2.39 | 3.37 | 2.74 | 0.039 * | |||
| Right-side mirror | 0.54 | 0.67 | 0.49 | 0.57 | 0.826 | |||
| Total of all AOIs | 6.24 | 2.66 | 6.79 | 3.03 | 0.616 | |||
| No.5 | Monitor | 2. Sonar vehicle (S-V) | - | - | 4. Backup-camera with sonar vehicle (BCS-V) | 2.15 | 2.14 | - |
| Rearview mirror | 0.21 | 0.31 | 0.07 | 0.24 | 0.200 | |||
| Left-side mirror | 5.49 | 2.39 | 3.85 | 2.46 | 0.087 | |||
| Right-side mirror | 0.54 | 0.67 | 0.30 | 0.39 | 0.244 | |||
| Total of all AOIs | 6.24 | 2.66 | 6.37 | 2.85 | 0.901 | |||
| No.6 | Monitor | 3. Backup-camera vehicle (BC-V) | 2.89 | 3.08 | 4. Backup-camera with sonar vehicle (BCS-V) | 2.15 | 2.14 | 0.464 |
| Rearview mirror | 0.03 | 0.08 | 0.07 | 0.24 | 0.532 | |||
| Left-side mirror | 3.37 | 2.74 | 3.85 | 2.46 | 0.630 | |||
| Right-side mirror | 0.49 | 0.57 | 0.30 | 0.39 | 0.305 | |||
| Total of all AOIs | 6.79 | 3.03 | 6.37 | 2.85 | 0.711 | |||
| Com-Parison | AOI | Vehicle Technology | Gaze Time (s) | Vehicle Technology | Gaze Time (s) | p-Value | ||
|---|---|---|---|---|---|---|---|---|
| Average | SD | Average | SD | |||||
| No.1 | Rearview mirror | 1. No-tech vehicle (NT-V) | 0.10 | 0.29 | 2. Sonar vehicle (S-V) | 0.04 | 0.14 | 0.489 |
| Left-side mirror | 2.32 | 2.29 | 2.54 | 2.36 | 0.803 | |||
| Right-side mirror | 5.06 | 3.08 | 4.57 | 2.97 | 0.673 | |||
| Total of all AOIs | 7.48 | 4.47 | 7.15 | 3.81 | 0.837 | |||
| No.2 | Monitor | 1. No-tech vehicle (NT-V) | - | - | 3. Backup-camera vehicle (BC-V) | 9.70 | 4.44 | - |
| Rearview mirror | 0.10 | 0.29 | 0.00 | 0.00 | - | |||
| Left-side mirror | 2.32 | 2.29 | 1.10 | 1.37 | 0.099 | |||
| Right-side mirror | 5.06 | 3.08 | 2.32 | 1.95 | 0.009 ** | |||
| Total of all AOIs | 7.48 | 4.47 | 13.12 | 4.35 | 0.002 ** | |||
| No.3 | Monitor | 1. No-tech vehicle (NT-V) | - | - | 4. Backup-camera with sonar vehicle (BCS-V) | 8.44 | 3.35 | - |
| Rearview mirror | 0.10 | 0.29 | 0.01 | 0.04 | 0.258 | |||
| Left-side mirror | 2.32 | 2.29 | 1.31 | 1.53 | 0.185 | |||
| Right-side mirror | 5.06 | 3.08 | 2.13 | 1.54 | 0.005 ** | |||
| Total of all AOIs | 7.48 | 4.47 | 11.89 | 3.10 | 0.005 ** | |||
| No.4 | Monitor | 2. Sonar vehicle (S-V) | - | - | 3. Backup-camera vehicle (BC-V) | 9.70 | 4.44 | - |
| Rearview mirror | 0.04 | 0.14 | 0.00 | 0.00 | - | |||
| Left-side mirror | 2.54 | 2.36 | 1.10 | 1.37 | 0.059 | |||
| Right-side mirror | 4.57 | 2.97 | 2.32 | 1.95 | 0.026 * | |||
| Total of all AOIs | 7.15 | 3.81 | 13.12 | 4.35 | 0.001 ** | |||
| No.5 | Monitor | 2. Sonar vehicle (S-V) | - | - | 4. Backup-camera with sonar vehicle (BCS-V) | 8.44 | 3.35 | - |
| Rearview mirror | 0.04 | 0.14 | 0.01 | 0.04 | 0.408 | |||
| Left-side mirror | 2.54 | 2.36 | 1.31 | 1.53 | 0.115 | |||
| Right-side mirror | 4.57 | 2.97 | 2.13 | 1.54 | 0.013 * | |||
| Total of all AOIs | 7.15 | 3.81 | 11.89 | 3.10 | 0.001 ** | |||
| No.6 | Monitor | 3. Backup-camera vehicle (BC-V) | 9.70 | 4.44 | 4. Backup-camera with sonar vehicle (BCS-V) | 8.44 | 3.35 | 0.405 |
| Rearview mirror | 0.00 | 0.00 | 0.01 | 0.04 | - | |||
| Left-side mirror | 1.10 | 1.37 | 1.31 | 1.53 | 0.696 | |||
| Right-side mirror | 2.32 | 1.95 | 2.13 | 1.54 | 0.778 | |||
| Total of all AOIs | 13.12 | 4.35 | 11.89 | 3.10 | 0.400 | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Matsui, Y.; Oikawa, S. Gazing Characteristics of a Driver during Vehicle Backing. Appl. Sci. 2021, 11, 2180. https://doi.org/10.3390/app11052180
Matsui Y, Oikawa S. Gazing Characteristics of a Driver during Vehicle Backing. Applied Sciences. 2021; 11(5):2180. https://doi.org/10.3390/app11052180
Chicago/Turabian StyleMatsui, Yasuhiro, and Shoko Oikawa. 2021. "Gazing Characteristics of a Driver during Vehicle Backing" Applied Sciences 11, no. 5: 2180. https://doi.org/10.3390/app11052180
APA StyleMatsui, Y., & Oikawa, S. (2021). Gazing Characteristics of a Driver during Vehicle Backing. Applied Sciences, 11(5), 2180. https://doi.org/10.3390/app11052180