
Model-Free High Order Sliding Mode Control with Finite-Time Tracking for Unmanned Underwater Vehicles

 ,
,  ,
,  ,
,  ,
,  and
and 
Abstract
1. Introduction
2. Materials and Methods
2.1. Unmanned Underwater Vehicle Model
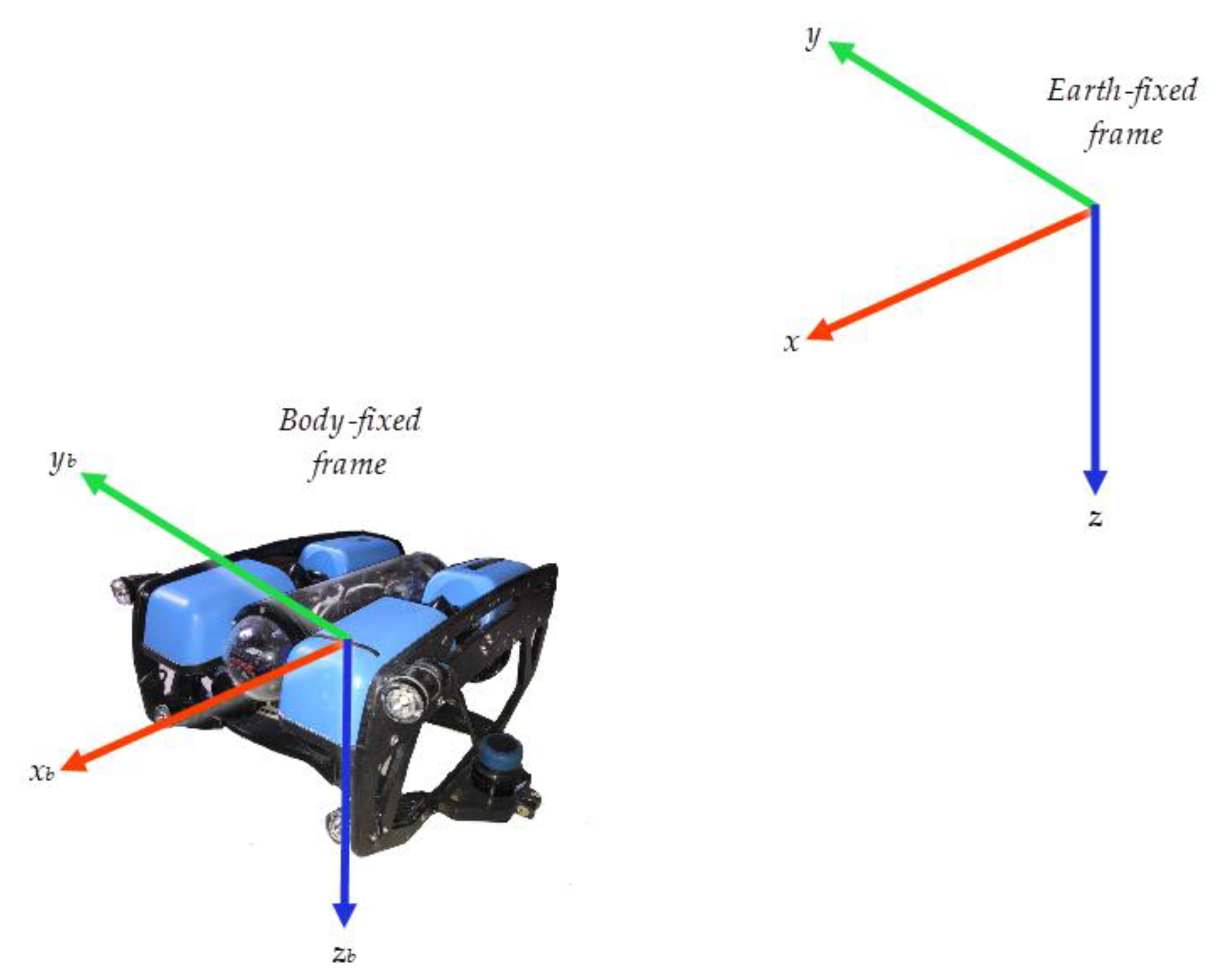
2.1.1. Kinematic Model
2.1.2. Hydrodynamic Model
- M ∈ℝ6×6 is the inertial and added mass matrix,
- C ∈ℝ6×6 is the rigid body and added mass centripetal and Coriolis matrix,
- D ∈ℝ6×6 is the hydrodynamic damping matrix,
- g ∈ℝ6×1 is the restitution forces vector,
- ∈ℝ6×6 is the thruster allocation matrix,
- ∈ℝ6×1 is a vector containing the force generated by the thrusters, and
- ∈ℝ6×1 represents environmental disturbances.
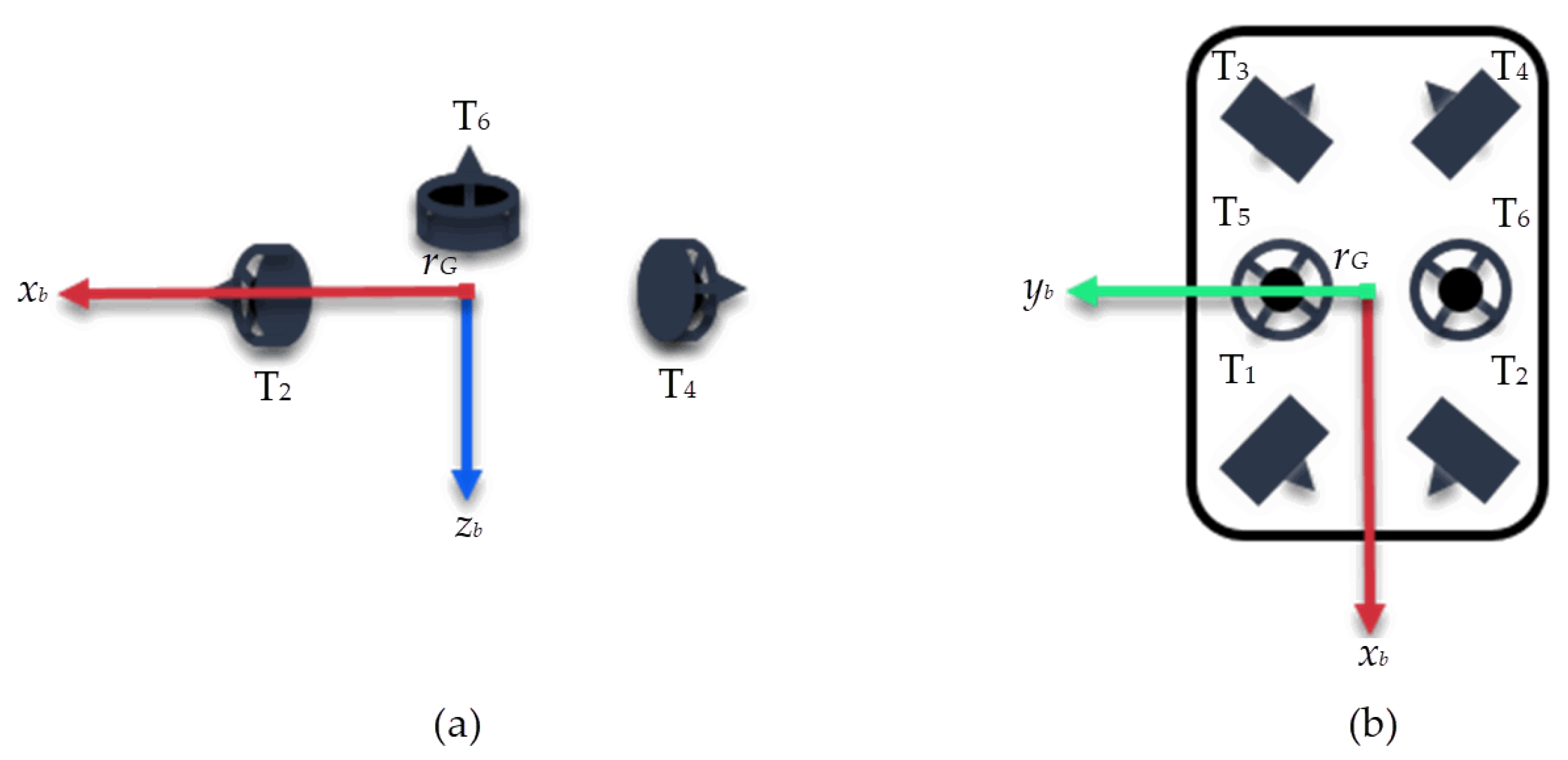
2.1.3. BlueROV2 Model
- Since BlueROV2 operates at relatively low speeds (i.e., less than 2 m/s), lift forces can be neglected.
- BlueROV2 is assumed to have port-starboard symmetry and fore-aft symmetry, and the center of gravity (CG) is in the symmetry planes.
- BlueROV2 is assumed to operate below the wave-affected zone. As a result, disturbances of waves on the vehicle are negligible.
- The thruster allocation of BlueROV2 does not permit active control of the pitch orientation q. However, the motion around this axis is considered self-regulated due to the vehicle buoyant restoring moments, resulting in the following reduced system
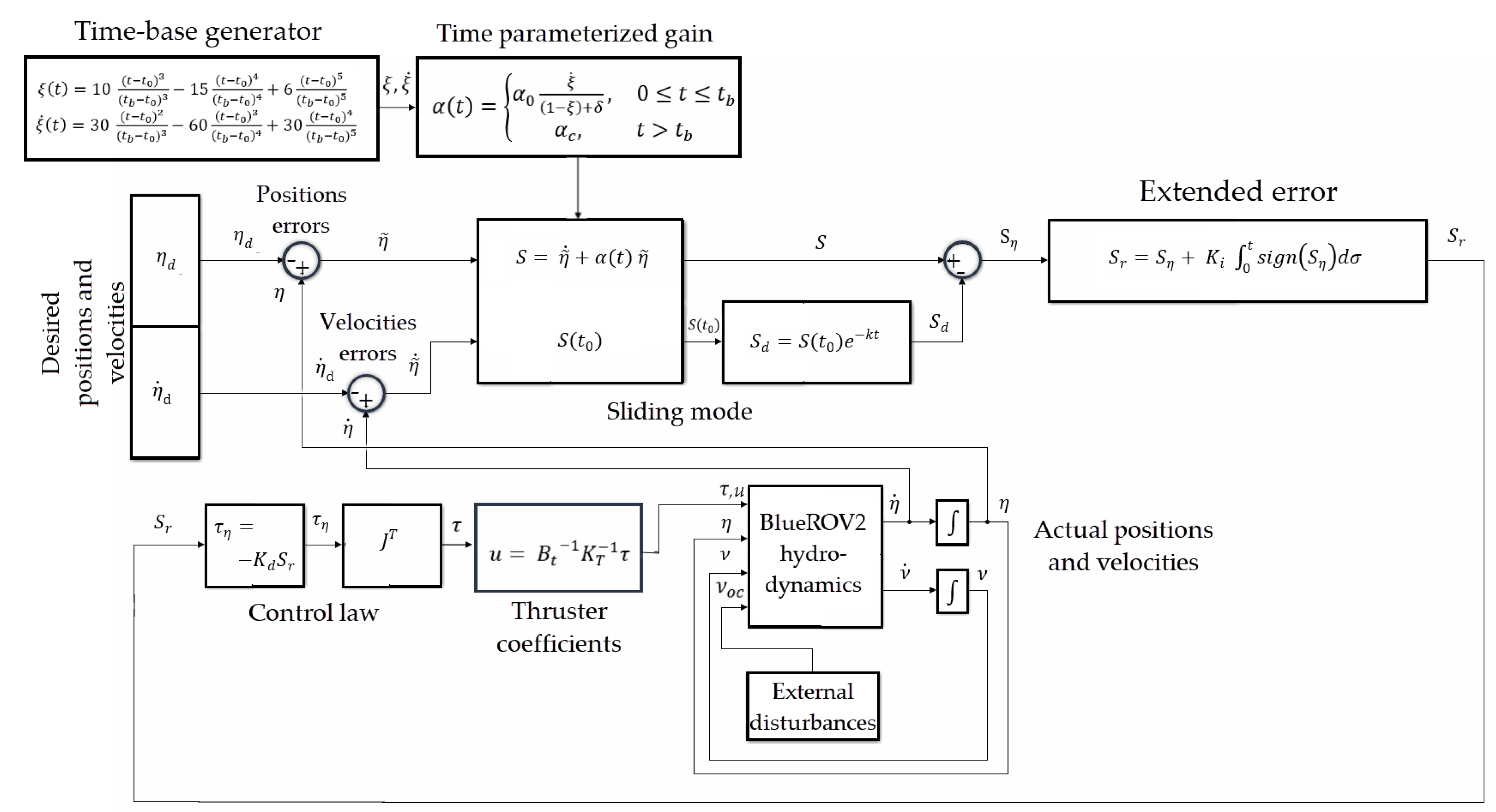
2.2. Model-Free High-Order SMC with Finite-Time Convergence
3. Validation Method for the Controller
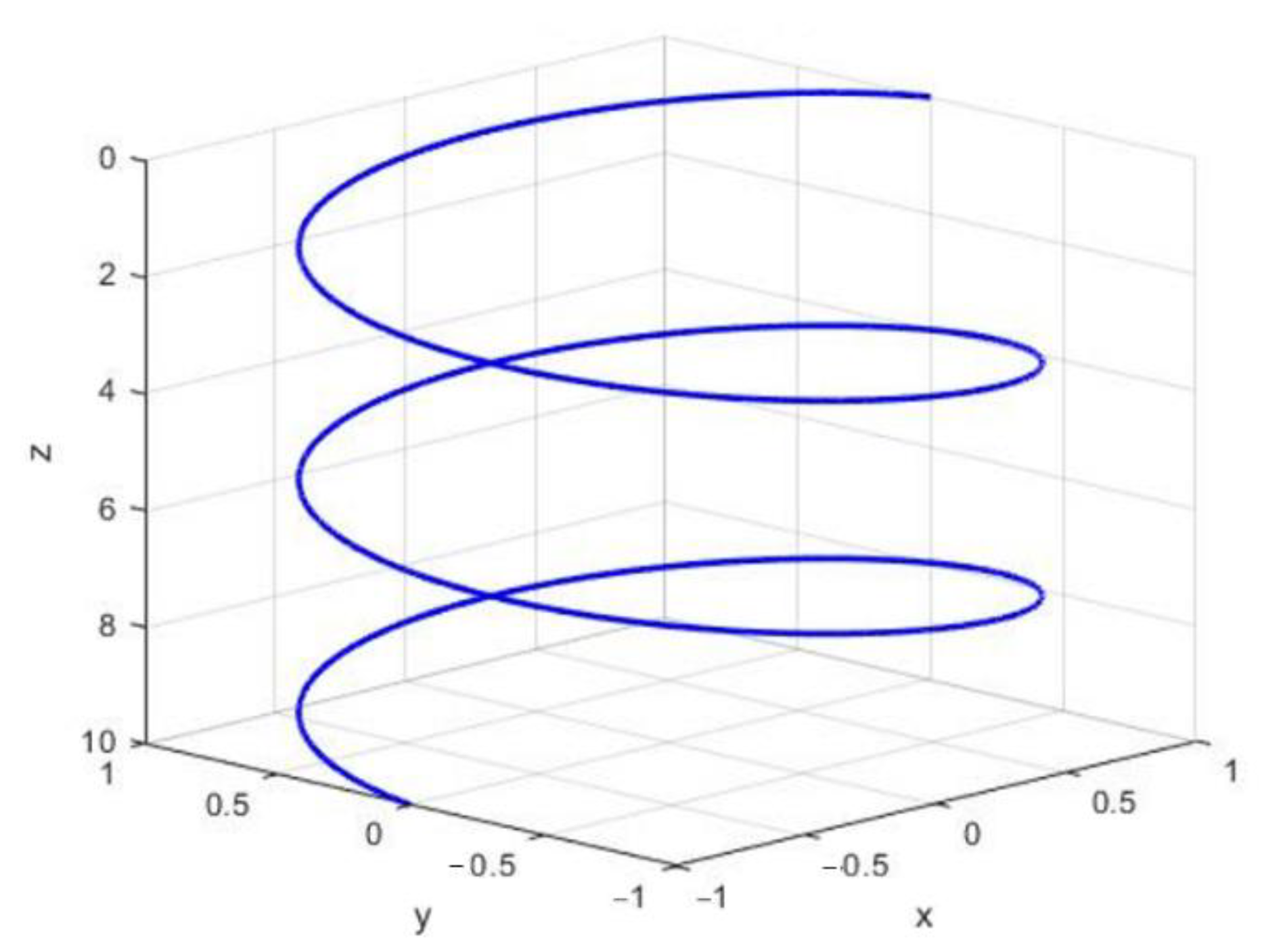
3.1. Parameterized Trajectory of the UUV
3.2. Considering Ocean Currents as Disturbances
3.3. Comparing with Classic Controllers
3.3.1. PID Controller
3.3.2. Feed-Back Linearization Controller
3.3.3. Lyapunov-Based Controller
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hartono, M.T.; Budiyanto, M.A.; Dhelika, R. Micro class underwater ROV (remotely operated vehicle) as a ship hull inspector: Development of an initial prototype. AIP Conf. Proc. 2020, 2227, 020025. [Google Scholar]
- Buscher, E.; Mathews, D.L.; Bryce, C.; Bryce, K.; Joseph, D.; Ban, N.C. Applying a Low Cost, Mini Remotely Operated Vehicle (ROV) to Assess an Ecological Baseline of an Indigenous Seascape in Canada. Front. Mar. Sci. 2020, 7, 1–12. [Google Scholar] [CrossRef]
- Sward, D.; Monk, J.; Barrett, N. A systematic review of remotely operated vehicle surveys for visually assessing fish assemblages. Front. Mar. Sci. 2019, 6, 1–19. [Google Scholar] [CrossRef]
- Sandøy, S.S.; Hegde, J.; Schjølberg, I.; Utne, I.B. Polar Map: A Digital Representation of Closed Structures for Underwater Robotic Inspection. Aquac. Eng. 2020, 89, 102039. [Google Scholar] [CrossRef]
- González-García, J.; Gómez-Espinosa, A.; Cuan-Urquizo, E.; García-Valdovinos, L.G.; Salgado-Jiménez, T.; Cabello, J.A.E. Autonomous Underwater Vehicles: Localization, Navigation, and Communication for Collaborative Missions. Appl. Sci. 2020, 10, 1256. [Google Scholar] [CrossRef]
- Kumar, N.; Rani, M. An efficient hybrid approach for trajectory tracking control of autonomous underwater vehicles. Appl. Ocean Res. 2020, 95, 102053. [Google Scholar] [CrossRef]
- Elmokadem, T.; Zribi, M.; Youcef-Toumi, K. Terminal sliding mode control for the trajectory tracking of underactuated Autonomous Underwater Vehicles. Ocean Eng. 2017, 129, 613–625. [Google Scholar] [CrossRef]
- Rojas, J.; Baatar, G.; Cuellar, F.; Eichhorn, M.; Glotzbach, T. Modelling and Essential Control of an Oceanographic Monitoring Remotely Operated Underwater Vehicle. IFAC-PapersOnLine 2018, 51, 213–219. [Google Scholar] [CrossRef]
- Dong, M.; Li, J.; Chou, W. Depth control of ROV in nuclear power plant based on fuzzy PID and dynamics compensation. Microsyst. Technol. 2020, 26, 811–821. [Google Scholar] [CrossRef]
- Yang, M.; Sheng, Z.; Che, Y.; Hu, J.; Hu, K.; Du, Y. Design of Small Monitoring ROV for Aquaculture. In Proceedings of the OCEANS 2019—Marseille, Marseille, France, 17–20 June 2019; pp. 1–9. [Google Scholar]
- Zhang, L.; Zhang, L.; Liu, S.; Zhou, J.; Papavassiliou, C. Low-level control technology of micro autonomous underwater vehicle based on intelligent computing. Cluster Comput. 2019, 22, 8569–8580. [Google Scholar] [CrossRef]
- Hernández-Alvarado, R.; García-Valdovinos, L.G.; Salgado-Jiménez, T.; Gómez-Espinosa, A.; Fonseca-Navarro, F. Neural network-based self-tuning PID control for underwater vehicles. Sensors 2016, 16, 1429. [Google Scholar] [CrossRef]
- Yan, Z.; Yang, Z.; Zhang, J.; Zhou, J.; Jiang, A.; Du, X. Trajectory tracking control of uuv based on backstepping sliding mode with fuzzy switching gain in diving plane. IEEE Access 2019, 7, 166788–166795. [Google Scholar] [CrossRef]
- Yan, Z.; Wang, M.; Xu, J. Integrated guidance and control strategy for homing of unmanned underwater vehicles. J. Franklin Inst. 2019, 356, 3831–3848. [Google Scholar] [CrossRef]
- Zhou, J.; Zhao, X.; Chen, T.; Yan, Z.; Yang, Z. Trajectory Tracking Control of an Underactuated AUV Based on Backstepping Sliding Mode with State Prediction. IEEE Access 2019, 7, 181983–181993. [Google Scholar] [CrossRef]
- Huang, B.; Yang, Q. Double-loop sliding mode controller with a novel switching term for the trajectory tracking of work-class ROVs. Ocean Eng. 2019, 178, 80–94. [Google Scholar] [CrossRef]
- Ramezani-al, M.R.; Tavanaei Sereshki, Z. A novel adaptive sliding mode controller design for tracking problem of an AUV in the horizontal plane. Int. J. Dyn. Control 2019, 7, 679–689. [Google Scholar] [CrossRef]
- Lv, T.; Zhou, J.; Wang, Y.; Gong, W.; Zhang, M. Sliding mode based fault tolerant control for autonomous underwater vehicle. Ocean Eng. 2020, 216, 107855. [Google Scholar] [CrossRef]
- García-Valdovinos, L.G.; Fonseca-Navarro, F.; Aizpuru-Zinkunegi, J.; Salgado-Jiménez, T.; Gómez-Espinosa, A.; Cruz-Ledesma, J.A. Neuro-Sliding Control for Underwater ROV’s Subject to Unknown Disturbances. Sensors 2019, 19, 2943. [Google Scholar] [CrossRef]
- Qin, H.; Li, C.; Sun, Y.; Li, X.; Du, Y.; Deng, Z. Finite-time trajectory tracking control of unmanned surface vessel with error constraints and input saturations. J. Frankl. Inst. 2020, 357, 11472–11495. [Google Scholar] [CrossRef]
- Yan, Z.; Yu, H.; Zhang, W.; Li, B.; Zhou, J. Globally finite-time stable tracking control of underactuated UUVs. Ocean Eng. 2015, 107, 132–146. [Google Scholar] [CrossRef]
- Yu, H.; Guo, C.; Yan, Z. Globally finite-time stable three-dimensional trajectory-tracking control of underactuated UUVs. Ocean Eng. 2019, 189, 106329. [Google Scholar] [CrossRef]
- Chu, Z.; Zhu, D.; Yang, S.X. Observer-based adaptive neural network trajectory tracking control for remotely operated vehicle. IEEE Trans. Neural Networks Learn. Syst. 2017, 28, 1633–1645. [Google Scholar] [CrossRef]
- Qiao, L.; Zhang, W. Double-Loop Integral Terminal Sliding Mode Tracking Control for UUVs with Adaptive Dynamic Compensation of Uncertainties and Disturbances. IEEE J. Ocean. Eng. 2019, 44, 29–53. [Google Scholar] [CrossRef]
- Guerrero, J.; Torres, J.; Creuze, V.; Chemori, A. Trajectory tracking for autonomous underwater vehicle: An adaptive approach. Ocean Eng. 2019, 172, 511–522. [Google Scholar] [CrossRef]
- Parra-Vega, V.; Garcia-Valdovinos, L.; Dominguéz-Ramiréz, O.A. Sliding PID Control for Tracking in Finite Time for Robot Arms. In Proceedings of the 11th International Conference on Advanced Robotics, Coimbra, Portugal, 30 June–3 July 2003; pp. 1526–1531. [Google Scholar]
- García-Valdovinos, L.G.; Parra-Vega, V.; Arteaga, M.A. Bilateral Cartesian sliding PID force/position control for tracking in finite time of master-slave systems. Proc. Am. Control Conf. 2006, 2006, 369–375. [Google Scholar] [CrossRef]
- Garcia-Valdovinos, L.G.; Parra-Vega, V.; Mendez-Iglesias, J.A.; Arteaga, M.A. Cartesian sliding PID force/position control for transparent bilateral teleoperation. IECON Proc. Ind. Electron. Conf. 2005, 2005, 1979–1985. [Google Scholar] [CrossRef]
- Perruquetti, W.; Barbot, J.-P. Sliding Mode Control in Engineering; Marcel Dekker Inc.: New York, NY, USA, 2002; ISBN 9780429222832. [Google Scholar]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons, Ltd.: Chichester, UK, 2011; ISBN 9781119994138. [Google Scholar]
- BlueRobotics. BlueROV2—Datasheet. 2019. Available online: https://bluerobotics.com/wp-content/uploads/2020/02/br_bluerov2_datasheet_rev6.pdf (accessed on 11 December 2020).
- Lack, S.; Rentzow, E.; Jeinsch, T. Experimental Parameter Identification for an open-frame ROV: Comparison of towing tank tests and open water self-propelled tests. IFAC-PapersOnLine 2019, 52, 271–276. [Google Scholar] [CrossRef]
- Wu, C. 6-DoF Modelling and Control of a Remotely Operated Vehicle. Master’s Thesis, Flinders University, Adelaide, Australia, 2018. [Google Scholar]
- García-Valdovinos, L.G.; Salgado-Jiménez, T.; Bandala-Sánchez, M.; Nava-Balanzar, L.; Hernández-Alvarado, R.; Cruz-Ledesma, J.A. Modelling, Design and Robust Control of a Remotely Operated Underwater Vehicle. Int. J. Adv. Robot. Syst. 2014, 11, 1. [Google Scholar] [CrossRef]
- Zhang, S.; Yu, J.; Zhang, A.; Zhang, F. Spiraling motion of underwater gliders: Modeling, analysis, and experimental results. Ocean Eng. 2013, 60, 1–13. [Google Scholar] [CrossRef]
- Do, K.D.; Pan, J. Control of Ships and Underwater Vehicles; Springer Science & Business Media: London, UK, 2009; ISBN 978-1-84882-729-5. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Movement | Name | Position | Velocity | Force/Moment |
|---|---|---|---|---|
| X translation | Surge | x | u | X |
| Y translation | Sway | y | v | Y |
| Z translation | Heave | z | w | Z |
| X rotation | Roll | φ | p | K |
| Y rotation | Pitch | θ | q | M |
| Z rotation | Yaw | ψ | r | N |
| Parameters | Symbol | Value | Unit |
|---|---|---|---|
| Mass | m | 10 | kg |
| Buoyancy | B | 100.06 | N |
| Weight | W | 98.1 | N |
| Center of gravity | m | ||
| Center of buoyancy | m | ||
| Inertia moment | I = diagonal () | I = diagonal (0.16) | |
| Added mass parameters | −5.5 | kg | |
| −12.7 | kg | ||
| −14.57 | kg | ||
| −0.12 | |||
| −0.12 | |||
| −0.12 | |||
| Linear Damping parameters | −4.03 | ||
| −6.22 | |||
| −5.18 | |||
| −0.07 | |||
| −0.07 | |||
| −0.07 | |||
| Quadratic Damping parameters | −18.18 | ||
| −21.66 | |||
| −36.99 | |||
| −1.55 | |||
| −1.55 | |||
| −1.55 |
| Controller | |||||
|---|---|---|---|---|---|
| PID | 140 | 120 | 180 | - | - |
| Feed-back linearization | 140 | 120 | 180 | - | - |
| Lyapunov-based | - | - | 80 | 0.80 | - |
| Model-free 2nd order SMC with finite-time convergence | - | 5 | 800 | 5 |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| 0 | 0.001 | ||
| 5 | 5 | ||
| 1.01 | |||
| 20 |
| Controller | Thruster 1 | Thruster 2 | Thruster 3 | Thruster 4 | Thruster 5 | Thruster 6 | Mean |
|---|---|---|---|---|---|---|---|
| PID | 0.2078 | 0.1946 | 0.2010 | 0.2105 | 0.1311 | 0.2041 | 0.1915 |
| Feed-back linearization | 0.1676 | 0.1876 | 0.1909 | 0.1693 | 0.2851 | 0.2760 | 0.2127 |
| Lyapunov-based | 0.1278 | 0.1500 | 0.1380 | 0.1192 | 0.0678 | 0.1358 | 0.1231 |
| Model-free 2nd Order SMC with | 0.1449 | 0.1400 | 0.1333 | 0.1378 | 0.0801 | 0.1418 | 0.1296 |
| Model-free 2nd Order SMC with | 0.1264 | 0.1175 | 0.0986 | 0.1059 | 0.0740 | 0.1324 | 0.1091 |
| Model-free 2nd Order SMC with | 0.1132 | 0.1067 | 0.0880 | 0.0921 | 0.0726 | 0.1295 | 0.1004 |
| Controller | Thruster 1 | Thruster 2 | Thruster 3 | Thruster 4 | Thruster 5 | Thruster 6 | Mean |
|---|---|---|---|---|---|---|---|
| PID | 0.3254 | 0.3131 | 0.3534 | 0.3163 | 0.1135 | 0.1761 | 0.2663 |
| Feed-back linearization | 0.3978 | 0.4008 | 0.4056 | 0.3892 | 0.7889 | 0.7749 | 0.5262 |
| Lyapunov-based | 0.27321 | 0.2479 | 0.2607 | 0.2306 | 0.0578 | 0.0843 | 0.1924 |
| Model-free 2nd Order SMC with | 0.2790 | 0.2684 | 0.3093 | 0.2646 | 0.0578 | 0.0840 | 0.2105 |
| Model-free 2nd Order SMC with | 0.2909 | 0.2670 | 0.2801 | 0.2535 | 0.0500 | 0.0556 | 0.1995 |
| Model-free 2nd Order SMC with | 0.2897 | 0.2525 | 0.2625 | 0.2421 | 0.0479 | 0.0469 | 0.1903 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
González-García, J.; Narcizo-Nuci, N.A.; García-Valdovinos, L.G.; Salgado-Jiménez, T.; Gómez-Espinosa, A.; Cuan-Urquizo, E.; Cabello, J.A.E. Model-Free High Order Sliding Mode Control with Finite-Time Tracking for Unmanned Underwater Vehicles. Appl. Sci. 2021, 11, 1836. https://doi.org/10.3390/app11041836
González-García J, Narcizo-Nuci NA, García-Valdovinos LG, Salgado-Jiménez T, Gómez-Espinosa A, Cuan-Urquizo E, Cabello JAE. Model-Free High Order Sliding Mode Control with Finite-Time Tracking for Unmanned Underwater Vehicles. Applied Sciences. 2021; 11(4):1836. https://doi.org/10.3390/app11041836
Chicago/Turabian StyleGonzález-García, Josué, Néstor Alejandro Narcizo-Nuci, Luis Govinda García-Valdovinos, Tomás Salgado-Jiménez, Alfonso Gómez-Espinosa, Enrique Cuan-Urquizo, and Jesús Arturo Escobedo Cabello. 2021. "Model-Free High Order Sliding Mode Control with Finite-Time Tracking for Unmanned Underwater Vehicles" Applied Sciences 11, no. 4: 1836. https://doi.org/10.3390/app11041836
APA StyleGonzález-García, J., Narcizo-Nuci, N. A., García-Valdovinos, L. G., Salgado-Jiménez, T., Gómez-Espinosa, A., Cuan-Urquizo, E., & Cabello, J. A. E. (2021). Model-Free High Order Sliding Mode Control with Finite-Time Tracking for Unmanned Underwater Vehicles. Applied Sciences, 11(4), 1836. https://doi.org/10.3390/app11041836