
Pulse Peak Delay-Total Focusing Method for Ultrasonic Tomography on Concrete Structure


Abstract
1. Introduction
2. Pulse Peak Delay Calibration
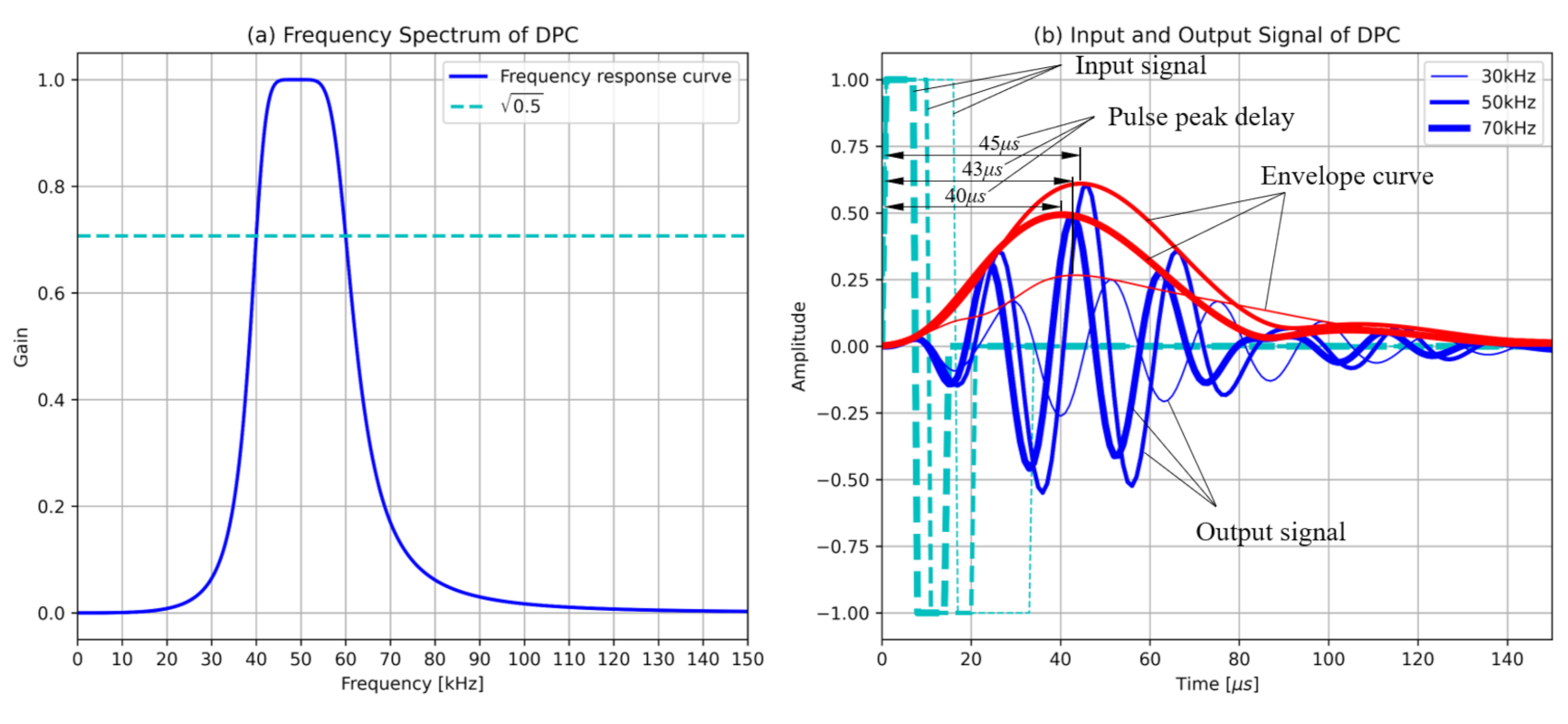
2.1. Pulse Peak Delay
2.2. Pulse Peak Delay-Total Focusing Method
3. Simulation
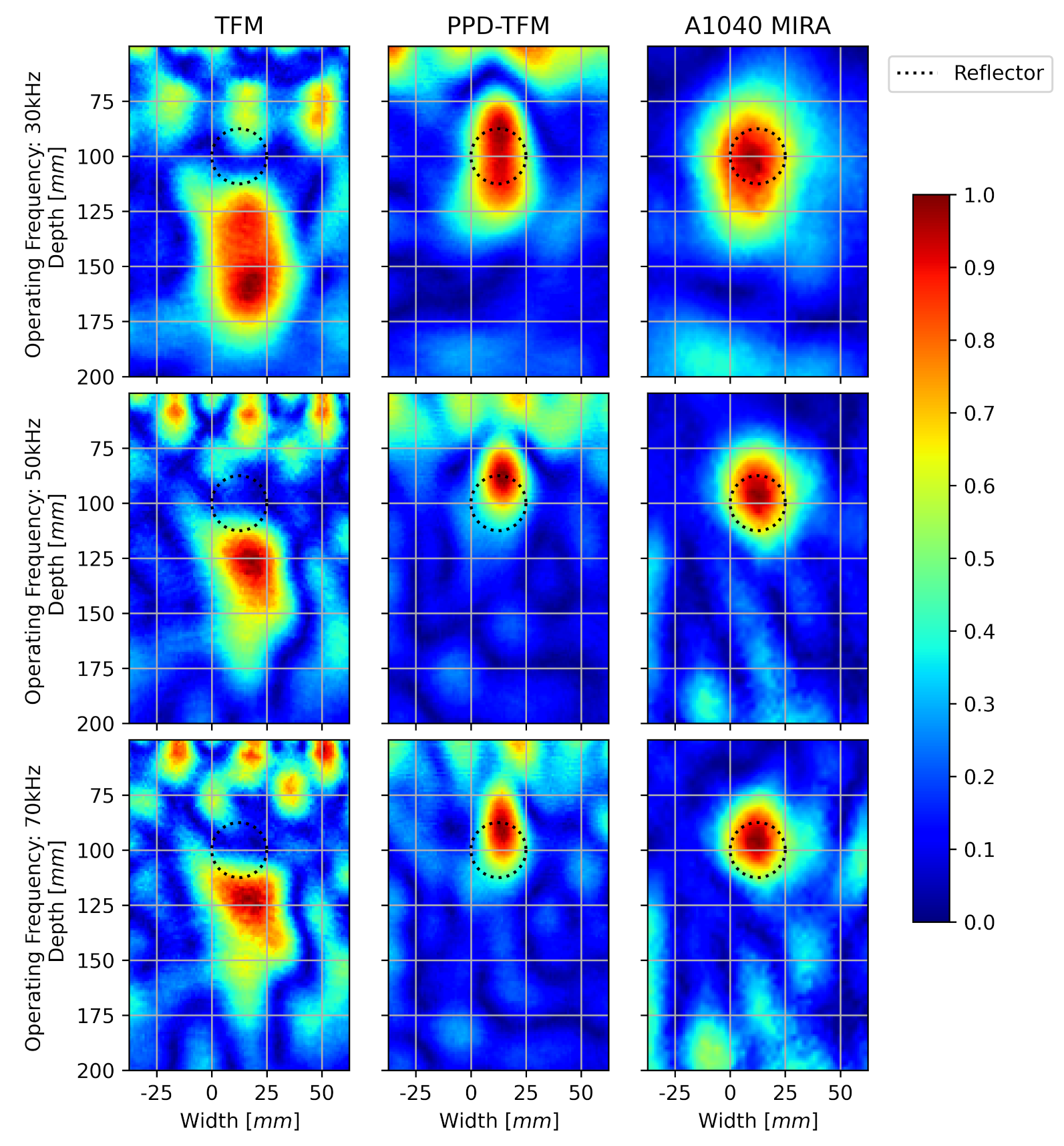
3.1. Simulation Results
3.2. Array Performance Evaluation
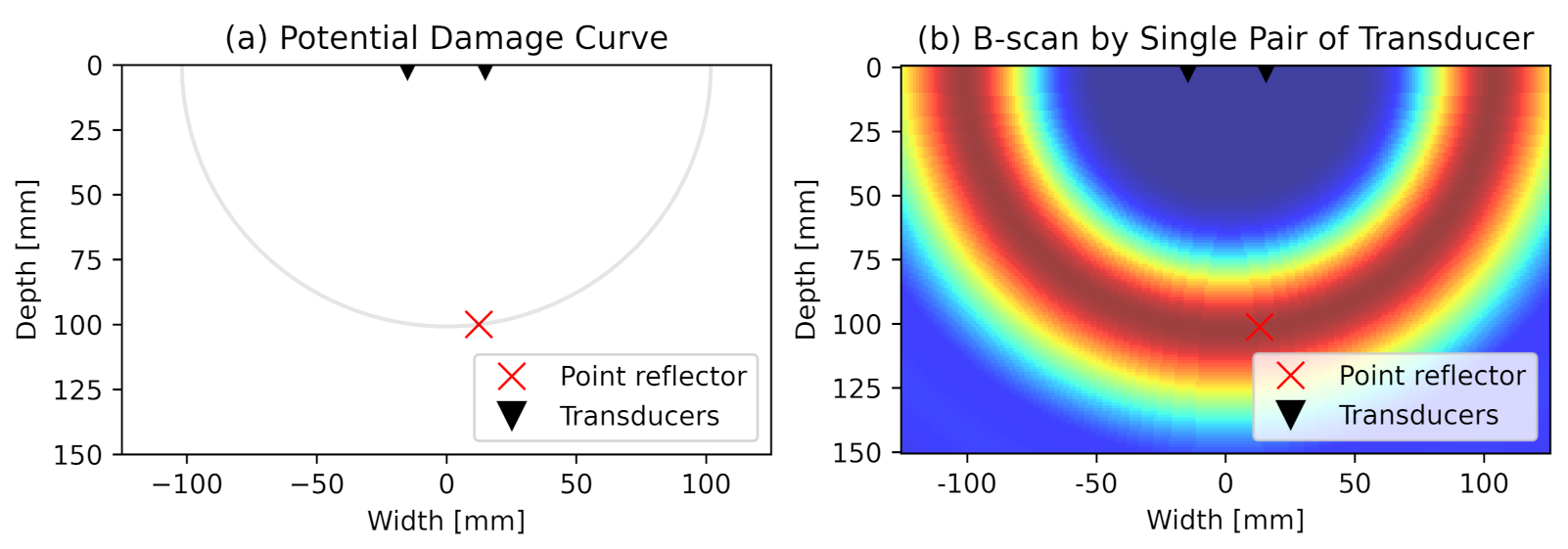
3.2.1. Potential Damage Curve
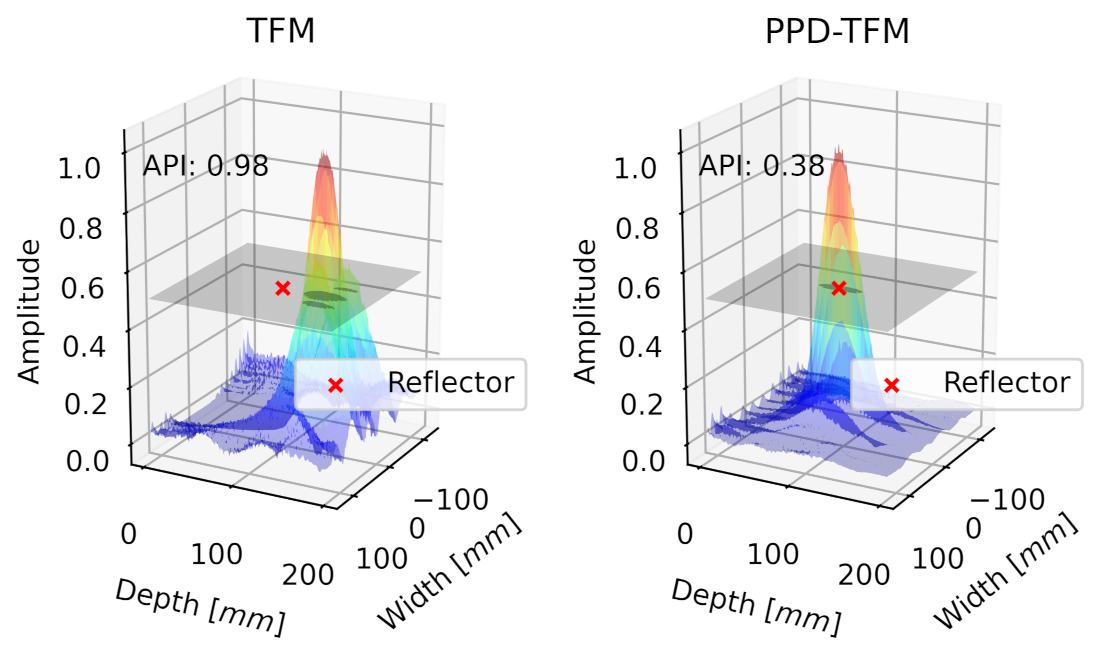
3.2.2. Array Performance Indicator
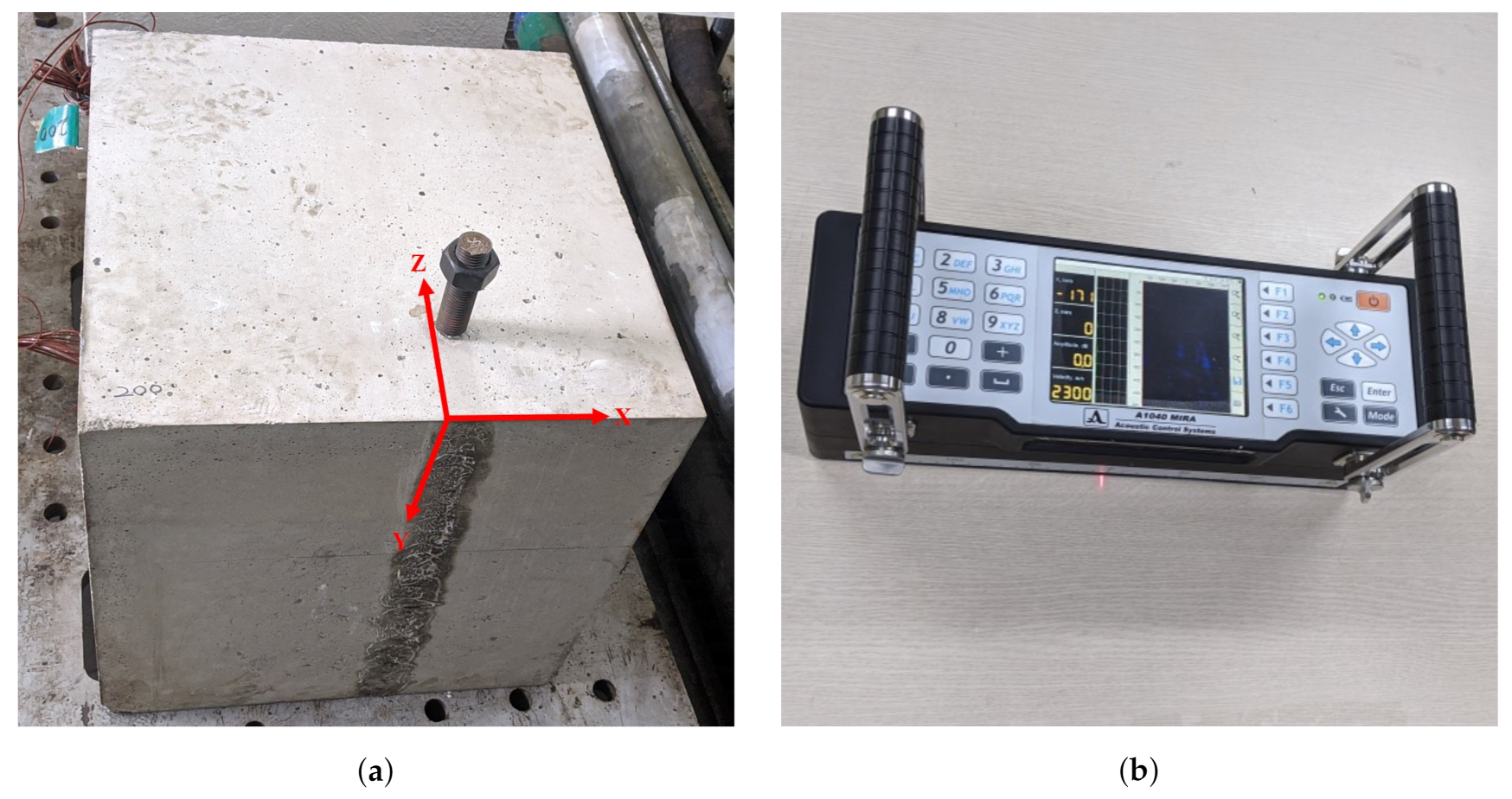
4. Experiment
Experimental Results and Discussion
5. Conclusions
- The PPD-TFM improved the accuracy of the image reconstruction algorithm on concrete structures. The proposed method even showed better accuracy than the SAFT-C embedded in the MIRA device. In addition to the higher accuracy, the PPD-TFM showed better performance than the existing TFM and even the SAFT-C method in terms of API.
- A high input frequency could result in an accurate B-scan result even if the PPD-TFM is not applied. However, in the case of the MIRA device that was developed for concrete structures, a low-frequency input pulse is inevitable to avoid severe signal attenuation by concrete aggregates. In addition, a fixed range of frequency bandwidth for the DPC transducer in the MIRA device makes the usage of high-frequency input out of the bandwidth ineffective. Therefore, the calibration of the PPD like the PPD-TFM is essential for the MIRA device.
- Although the proposed PPD-TFM provides a high-quality image, the image can be impaired by surface noise especially if the reflector is close to the surface. If surface noise removal techniques are adapted in the PPD-TFM, a better B-scan with reduced surface noise could be expected.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mindess, S. Developments in the Formulation and Reinforcement of Concrete; Woodhead Publishing: Sawston, Cambridge, MA, USA, 2019. [Google Scholar]
- Pacheco-Torgal, F.; Abdollahnejad, Z.; Miraldo, S.; Baklouti, S.; Ding, Y. An overview on the potential of geopolymers for concrete infrastructure rehabilitation. Constr. Build. Mater. 2012, 36, 1053–1058. [Google Scholar] [CrossRef]
- ASCE. Infrastructure Report Card; ASCE: Asce Reston, VA, USA, 2017. [Google Scholar]
- Haach, V.G.; Ramirez, F.C. Qualitative assessment of concrete by ultrasound tomography. Constr. Build. Mater. 2016, 119, 61–70. [Google Scholar] [CrossRef]
- Camassa, D.; Castellano, A.; Fraddosio, A.; Piccioni, M.D. A New Ultrasonic Amplitude Tomography Approach, with Validation on Masonry Tuff Blocks. J. Nondestruct. Eval. 2020, 39, 1–19. [Google Scholar] [CrossRef]
- Camassa, D.; Castellano, A.; Fraddosio, A.; Piccioni, M.D. Improvements of the ultrasonic tomography for applications to historical masonry constructions. In Structural Analysis of Historical Constructions; Springer: Berlin, Germany, 2019; pp. 447–455. [Google Scholar]
- Zielińska, M.; Rucka, M. Non-destructive assessment of masonry pillars using ultrasonic tomography. Materials 2018, 11, 2543. [Google Scholar] [CrossRef] [PubMed]
- Choi, H.; Popovics, J.S. NDE application of ultrasonic tomography to a full-scale concrete structure. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2015, 62, 1076–1085. [Google Scholar] [CrossRef] [PubMed]
- Hoegh, K.; Khazanovich, L.; Yu, H.T. Ultrasonic tomography for evaluation of concrete pavements. Transp. Res. Rec. 2011, 2232, 85–94. [Google Scholar] [CrossRef]
- Schabowicz, K. Ultrasonic tomography-The latest nondestructive technique for testing concrete members-Description, test methodology, application example. Arch. Civ. Mech. Eng. 2014, 14, 295–303. [Google Scholar] [CrossRef]
- Misak, L.; Corbett, D.; Grantham, M. Comparison of 2D and 3D ultrasonic pulse echo imaging techniques for structural assessment. In MATEC Web of Conferences; EDP Sciences: Ulis, France, 2019; Volume 289, p. 06003. [Google Scholar]
- Bellanova, M.; Cucchi, M.; Felicetti, R.; Monte, F.L. Unconventional applications of A1040 MIRA tomograph. In Atti Conferenza Nazionale Sulle Prove Non Distruttive Monitoraggio Diagnostica AIPnD 2017; 2017; Available online: https://www.researchgate.net/publication/330716844 (accessed on 14 September 2020).
- Oraevsky, A.A.; Andreev, V.A.; Karabutov, A.A.; Esenaliev, R.O. Two-dimensional optoacoustic tomography: Transducer array and image reconstruction algorithm. In Laser-Tissue Interaction X: Photochemical, Photothermal, and Photomechanical; International Society for Optics and Photonics: Bellingham, Washington, WA, USA, 1999; Volume 3601, pp. 256–267. [Google Scholar]
- Zhang, J.; Drinkwater, B.W.; Wilcox, P.D. Effects of array transducer inconsistencies on total focusing method imaging performance. NDT E Int. 2011, 44, 361–368. [Google Scholar] [CrossRef]
- Shan, S.; Qiu, J.; Zhang, C.; Ji, H.; Cheng, L. Multi-damage localization on large complex structures through an extended delay-and-sum based method. Struct. Health Monit. 2016, 15, 50–64. [Google Scholar] [CrossRef]
- Salmanpour, M.; Sharif Khodaei, Z.; Aliabadi, M. Transducer placement optimisation scheme for a delay and sum damage detection algorithm. Struct. Control Health Monit. 2017, 24, e1898. [Google Scholar] [CrossRef]
- Harshit, J.; Patankar, V.H. Advances in Ultrasonic Instrumentation for Inspection of Concrete/RCC Structures; Elsevier: Amsterdam, The Netherlands, 2019. [Google Scholar]
- Chaix, J.F.; Garnier, V.; Corneloup, G. Concrete damage evolution analysis by backscattered ultrasonic waves. NDT E Int. 2003, 36, 461–469. [Google Scholar] [CrossRef]
- Bishko, A.; Samokrutov, A.A.; Shevaldykin, V.G. Ultrasonic echo-pulse tomography of concrete using shear waves low-frequency phased antenna arrays. In Proceedings of the 17th World Conference on Nondestructive Testing, Shanghai, China, 25–28 October 2008; Volume 25. [Google Scholar]
- De La Haza, A.O.; Samokrutov, A.A.; Samokrutov, P.A. Assessment of concrete structures using the Mira and Eyecon ultrasonic shear wave devices and the SAFT-C image reconstruction technique. Constr. Build. Mater. 2013, 38, 1276–1291. [Google Scholar] [CrossRef]
- Chen, Y.; Lam, K.; Zhou, D.; Cheng, W.; Dai, J.; Luo, H.; Chan, H. High-frequency PIN–PMN–PT single crystal ultrasonic transducer for imaging applications. Appl. Phys. A 2012, 108, 987–991. [Google Scholar] [CrossRef]
- Kim, H.J.; Lee, H.; Ziaie, B. A wideband PVDF-on-silicon ultrasonic transducer array with microspheres embedded low melting temperature alloy backing. Biomed. Microdevices 2007, 9, 83–90. [Google Scholar] [CrossRef] [PubMed]
- S1802-Shear wave DPC transducer 50 KHz | Acoustic Control Systems. Available online: https://acs-international.com/instruments/transducers/low-frequency-50-to-300-khz/dry-point-contact/single/s1802/ (accessed on 14 September 2020).
- Sakamoto, T.; Taki, H.; Sato, T. An experimental study of ultrasonic imaging with a reduced number of array elements using the envelope method. Acoust. Sci. Technol. 2011, 32, 143–150. [Google Scholar] [CrossRef]
- Wiggenhauser, H.; Samokrutov, A.; Mayer, K.; Krause, M.; Alekhin, S.; Elkin, V. Large aperture ultrasonic system for testing thick concrete structures. J. Infrastruct. Syst. 2017, 23, B4016004. [Google Scholar] [CrossRef]
- Stratoudaki, T.; Clark, M.; Wilcox, P.D. Laser induced ultrasonic phased array using full matrix capture data acquisition and total focusing method. Opt. Express 2016, 24, 21921–21938. [Google Scholar] [CrossRef] [PubMed]
- Hunter, A.J.; Drinkwater, B.W.; Wilcox, P.D. The wavenumber algorithm for full-matrix imaging using an ultrasonic array. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2008, 55, 2450–2462. [Google Scholar] [CrossRef] [PubMed]
- Holmes, C.; Drinkwater, B.W.; Wilcox, P.D. Post-processing of the full matrix of ultrasonic transmit–receive array data for non-destructive evaluation. NDT E Int. 2005, 38, 701–711. [Google Scholar] [CrossRef]
- Schabowicz, K.; Sterniuk, A.; Kwiecińska, A. Ultrasonic examination of concrete with one side access in practice. Mater. Sci. Eng. 2018, 365, 032058. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Image Reconstruction Algorithm | ||||
|---|---|---|---|---|
| TFM | PPD-TFM | SAFT-C | ||
| Input signal frequency | 30 kHz | 0.39 | 0.23 | 0.34 |
| 50 kHz | 0.67 | 0.27 | 0.49 | |
| 70 kHz | 1.42 | 0.56 | 0.89 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kwon, H.; Joh, C.; Chin, W.J. Pulse Peak Delay-Total Focusing Method for Ultrasonic Tomography on Concrete Structure. Appl. Sci. 2021, 11, 1741. https://doi.org/10.3390/app11041741
Kwon H, Joh C, Chin WJ. Pulse Peak Delay-Total Focusing Method for Ultrasonic Tomography on Concrete Structure. Applied Sciences. 2021; 11(4):1741. https://doi.org/10.3390/app11041741
Chicago/Turabian StyleKwon, Hungjoo, Changbin Joh, and Won Jong Chin. 2021. "Pulse Peak Delay-Total Focusing Method for Ultrasonic Tomography on Concrete Structure" Applied Sciences 11, no. 4: 1741. https://doi.org/10.3390/app11041741
APA StyleKwon, H., Joh, C., & Chin, W. J. (2021). Pulse Peak Delay-Total Focusing Method for Ultrasonic Tomography on Concrete Structure. Applied Sciences, 11(4), 1741. https://doi.org/10.3390/app11041741