Microseismic Location Error Due to Eikonal Traveltime Calculation



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Methods
2.1. Diffraction Stacking
2.2. FSM for the Eikonal Equation
2.3. FSM for the Factored Eikonal Equation
2.4. Eikonal Solution Using Physics-Informed Neural Networks (PINNs)
- a deep neural network (DNN) approximation of the unknown traveltime field ,
- a differentiation algorithm, i.e., automatic differentiation in this case, to evaluate the partial derivatives of with respect to the spatial coordinates ,
- a loss function incorporating the underlying eikonal equation sampled on a collocation grid, an optimizer to minimize the loss function by updating the neural network parameters.
3. Numerical Results
3.1. Homogeneous Model
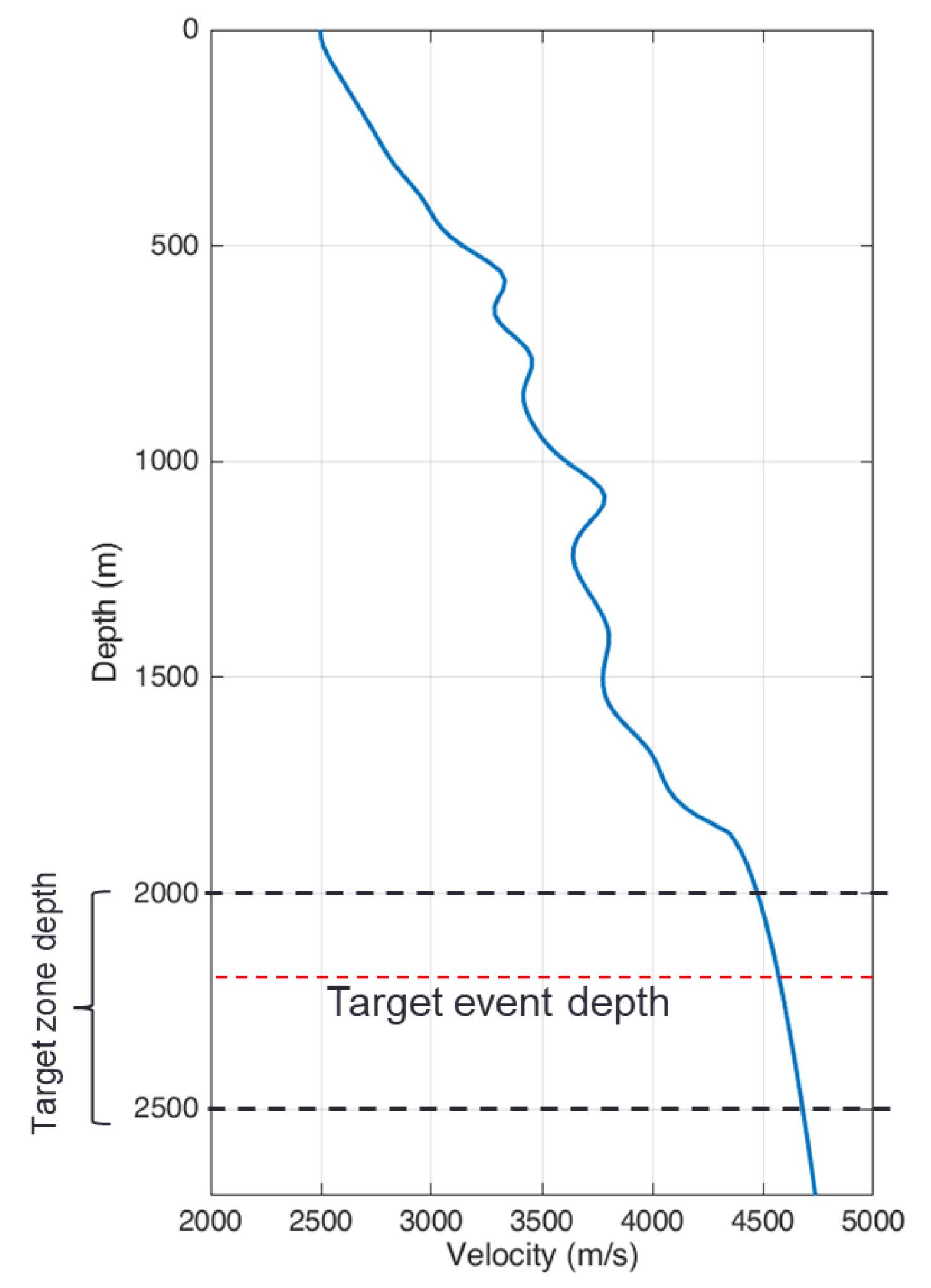
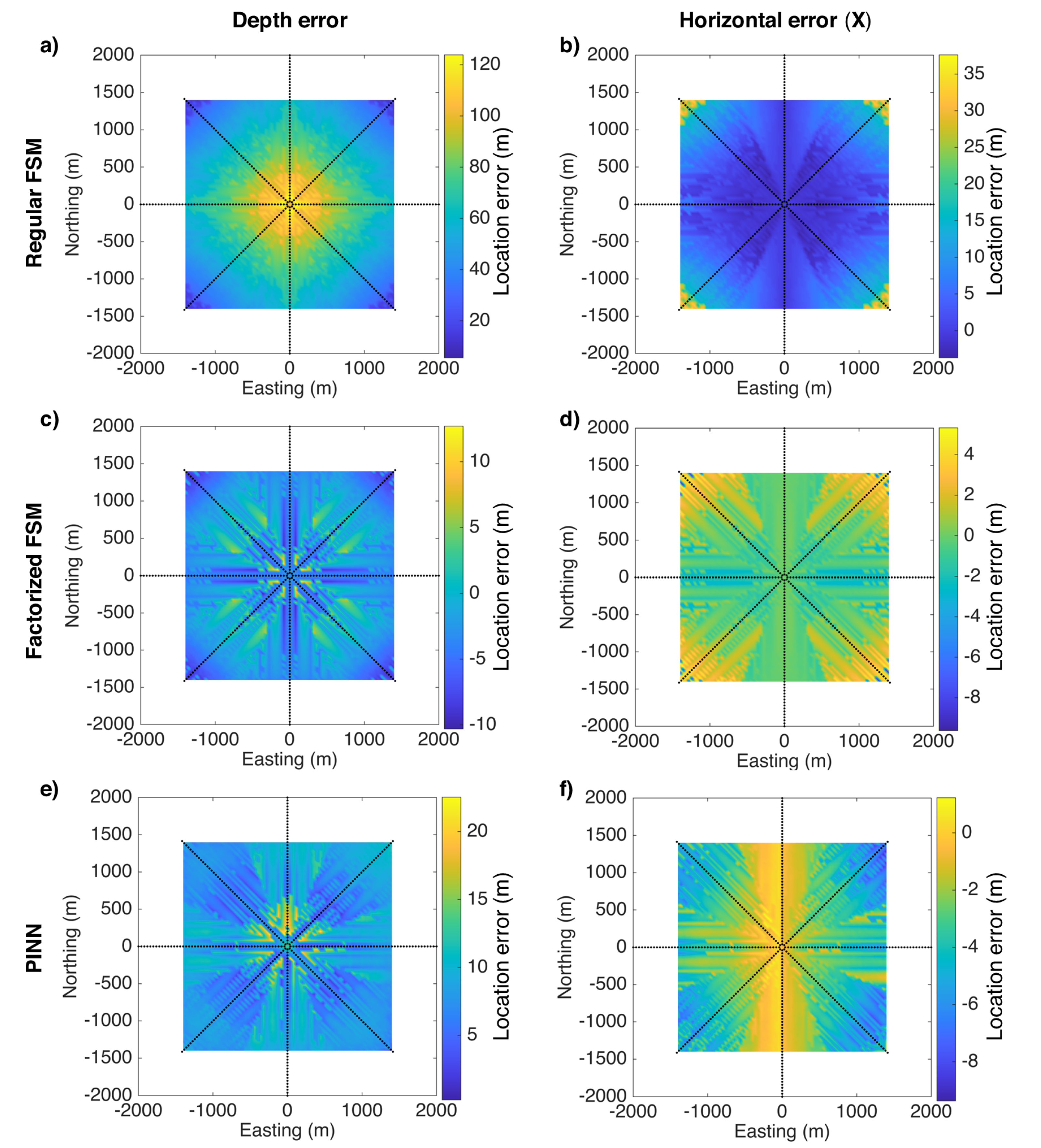
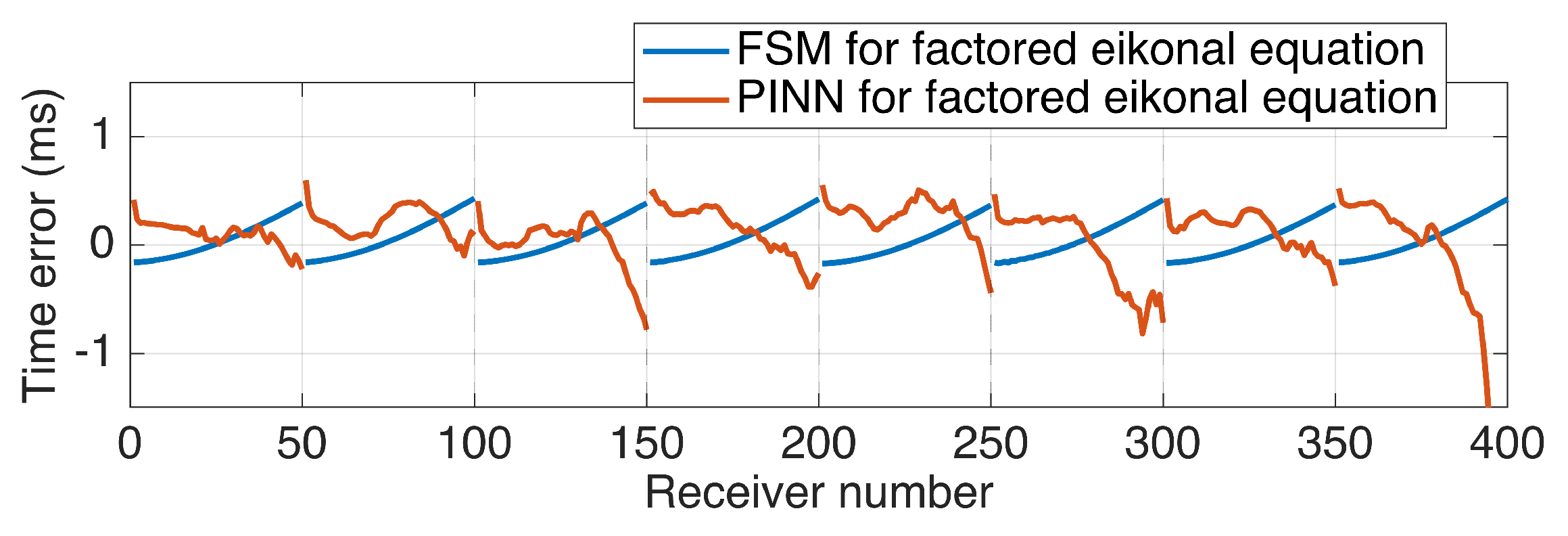
3.2. Heterogeneous Model
4. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Anikiev, D.; Valenta, J.; Stanek, F.; Eisner, L. Joint location and source mechanism inversion of microseismic events: Benchmarking on seismicity induced by hydraulic fracturing. Geophys. J. Int. 2014, 198, 249–258. [Google Scholar] [CrossRef]
- Duncan, P.M.; Eisner, L. Reservoir characterization using surface microseismic monitoring. Geophysics 2010, 75, 75A139–75A146. [Google Scholar] [CrossRef]
- Chambers, K.; Kendall, J.-M.; Brandsberg-Dahl, S.; Rueda, J. Testing the ability of surface arrays to monitor microseismic activity. Geophys. Prospect. 2010, 58, 821–830. [Google Scholar] [CrossRef]
- Zhao, H. A fast sweeping method for Eikonal equations. Math. Comput. 2004, 74, 603–628. [Google Scholar] [CrossRef]
- Sethian, J.A. A fast marching level set method for monotonically advancing fronts. Proc. Natl. Acad. Sci. USA 1996, 93, 1591–1595. [Google Scholar] [CrossRef]
- Cancela, B.; Ortega, M.; Penedo, M.G. A Wavefront Marching Method for Solving the Eikonal Equation on Cartesian Grids. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 1832–1840. [Google Scholar]
- Qian, J.; Zhang, Y.T.; Zhao, H.-K. A fast sweeping method for static convex Hamilton-Jacobi equations. J. Sci. Comput. 2007, 31, 237–271. [Google Scholar] [CrossRef]
- Fomel, S.; Luo, S.; Zhao, H. Fast sweeping method for the factored eikonal equation. J. Comput. Phys. 2009, 228, 6440–6455. [Google Scholar] [CrossRef]
- Waheed, U.; Haghighat, E.; Alkhalifah, Y.; Song, C.; Hao, Q. Eikonal solution using physics-informed neural networks. arXiv 2020, arXiv:2007.08330. [Google Scholar]
- Van Trier, J.; Symes, W.W. Upwind finite-difference calculation of traveltimes. Geophysics 1991, 56, 812–821. [Google Scholar] [CrossRef]
- Hornik, K.; Stinchcombe, M.; White, H. Multilayer feedforward networks are universal approximators. Neural Netw. 1989, 2, 359–366. [Google Scholar] [CrossRef]
- Haghighat, E.; Juanes, R. SciANN: A Keras wrapper for scientific computations and physics-informed deep learning using artificial neural networks. arXiv 2020, arXiv:2005.08803. [Google Scholar]
- Raissi, M.; Perdikaris, P.; Karniadakis, G.E. Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations. J. Comput. Phys. 2019, 378, 686–707. [Google Scholar] [CrossRef]








Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alexandrov, D.; Waheed, U.b.; Eisner, L. Microseismic Location Error Due to Eikonal Traveltime Calculation. Appl. Sci. 2021, 11, 982. https://doi.org/10.3390/app11030982
Alexandrov D, Waheed Ub, Eisner L. Microseismic Location Error Due to Eikonal Traveltime Calculation. Applied Sciences. 2021; 11(3):982. https://doi.org/10.3390/app11030982
Chicago/Turabian StyleAlexandrov, Dmitry, Umair bin Waheed, and Leo Eisner. 2021. "Microseismic Location Error Due to Eikonal Traveltime Calculation" Applied Sciences 11, no. 3: 982. https://doi.org/10.3390/app11030982
APA StyleAlexandrov, D., Waheed, U. b., & Eisner, L. (2021). Microseismic Location Error Due to Eikonal Traveltime Calculation. Applied Sciences, 11(3), 982. https://doi.org/10.3390/app11030982