Abstract
Hallux valgus (HV) is a foot deformity most commonly found in female and elderly patients. Its symptoms include foot pain, impaired gait patterns, poor balance, and falls in older adults. Recently, various HV orthoses have been introduced in the market; however, they have many shortcomings, such as high costs, unclear therapeutic effects, and effects on push-off of the foot during walking. The present study employs 3D printing technology to develop an HV orthosis and uses motion analysis to investigate the effects of wearing it. This study recruited 12 individuals with HV, who were asked to first perform a static HV measurement without orthosis, followed by a dynamic HV measurement using a Vicon motion analysis system in three trials. The results indicated that wearing the 3D-printed orthosis significantly corrected the HV angle by approximately 11° during static standing and by approximately 9° during dynamic walking. However, no significant difference was observed during use of the orthosis in terms of the ground reaction force. The obtained results demonstrate that the 3D-printed HV orthosis is an effective device for correcting the HV angle during static standing and dynamic walking, especially during the push-off phase of gait.
1. Introduction
Hallux valgus (HV) is one of the most common forefoot disorders in musculoskeletal practice and is characterised by progressive subluxation of the first metatarsophalangeal joint. This deformity is more common in female and elderly populations. Approximately half of these patients develop pain or disability with worsening valgus angulation [1]. Numerous treatment options have been proposed for symptomatic patients as an alternative to surgery, including shoe modification and the use of customised or prefabricated insoles or orthotic devices. Moreover, some hallux orthoses can be used to restore alignment and biomechanical function in patients with mild to moderate valgus deformity [2].
Orthotic management fixes the great toe in a corrected position [3]. Various orthoses are currently available on the market. However, previous studies have reported inconsistent findings regarding their effects on hallux position and progression [4,5]. Certain conservative treatments aim to prevent soft tissue contracture at rest. The use of such devices has often been advocated for nocturnal use only. Customised approaches fit individual patients’ needs to ensure that the devices are used consistently. However, making customised orthoses is expensive and time consuming, and thus might place considerable financial burden on patients.
Recently, 3D printing has rapidly emerged as a computer-aided design and manufacturing technology [6,7,8] and is regarded as a quick and cost-effective approach for developing a range of medical devices. This technology can be used to directly fabricate various prosthetic and orthotic devices from 3D geometric data and offers the benefits of customised manufacture and dimensional accuracy to meet the functional demands of individual patients. However, it is unclear whether 3D-printed orthoses can adequately control the hallux position during dynamic activities. Thus, further investigation is required to support their use.
Many studies have assessed the outcome of orthotic treatment, mostly on the basis of clinical evaluation [3,4,5]. However, relatively few studies have assessed gait deviation in cases of HV deformity. The changes in certain kinematic parameters can be somewhat restored after surgical correction. The motion analysis of a hallux segment can provide an insight into the dynamic survey of orthosis-mediated intervention [9]. Thus, this study designed a 3D-printed orthosis and evaluated the changes observed in the HV angle in patients wearing the orthosis. In addition, the effect of dynamic correction was ascertained through a kinematic analysis of the hallux range of movement during walking.
2. Material and Methods
This study included 12 patients (9 female; 3 male; mean age: 26.7 ± 9.8 years old). The inclusion criteria were following: (1) the participant was older than 20 years old; (2) the HV angle was greater than 20 degrees; (3) the participant did not previously receive any forms of foot surgery. The HV angle of the participants in the study was 26.5 ± 4.9°. The exclusion criteria included prior lower limb surgery, active inflammation, foot deformity, and any lesser toe deformity.
Since a previous study [10] reported that the HV angle of a normal foot was within 10 degrees, the normal foot model with a HV angle of 10 degrees was used to create an orthosis model. The primary contours of the great toe and first metatarsus were edited using 3D modelling software Meshmixer (Autodesk Inc., San Francisco, CA, USA) (Figure 1A). In consideration of the gap between the foot and shoe, the thickness of the 3D-printed orthosis was set at 2.5 mm. The size of the orthosis was according to the participant’s foot length to scale it. The digital data were exported in stereolithography file format, as required for subsequent 3D printing. The 3D printer Finder (FlashForge Corporation, Hangzhou, ZheJiang, China) was used to fabricate the orthosis with Flash Print slicing software (FlashForge Corporation, Hangzhou, ZheJiang, China) (Figure 1B). Thermoplastic polyurethane was used as the printing material, and the printing parameters were set as 0.18 mm thickness per layer, 100% filling density, 210 °C printing temperature, and 30 mm/s printing speed.
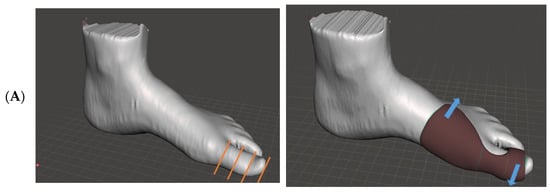
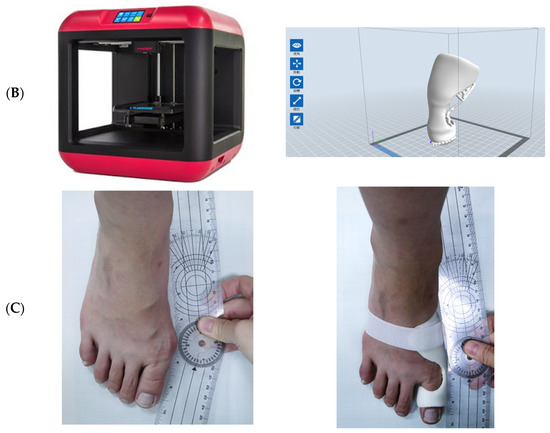
Figure 1.
Manufacture of the 3D-printed orthosis: (A) Design of the 3D-printed orthosis model. The toe is divided into three parts. The toe part forms a loop shape. The arrows indicate strap and corrective forces. (B) 3D-printed orthosis. (C) Correction of hallux valgus.
The orthosis was applied to maintain the great toe in a corrected position and allowed a prolonged stretch to the surrounding soft tissue, and a loop was created around the orthosis. Strap force was applied for the hallux to be adducted by the loop (Figure 1C). The bottom of the first metatarsal joint was kept hollow to provide adequate push-off phase of gait.
To realise the kinematic effect of wearing a 3D-printed orthosis in terms of both static and dynamic motion, a Vicon motion capture system (Oxford Metrics, Oxford, UK) with eight cameras operating at 120 Hz was used along with 13 passive reflective markers placed on each foot for the kinematic analysis, as shown in Figure 2. The hallux movement was measured using the model according to a previously described procedure [11]. The participants walked at a self-selected speed along a 6-m walkway with force plates embedded in the floor. Three-dimensional motion data were captured from at least three walking trials. The relative motion occurring at the intersegment angle was calculated for the following gait events of the stance phase: loading response (0–16%), mid-stance (16–50%), terminal stance (50–83%), and preswing (83–100%).
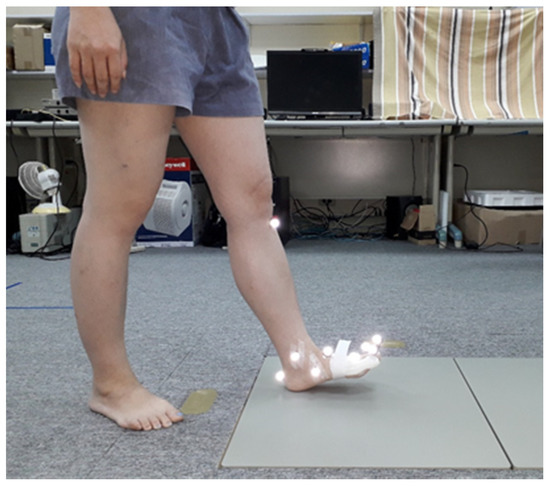
Figure 2.
Gait analysis of a patient wearing the 3D-printed orthosis.
The ground reaction force (GRF) was estimated to quantify the kinetic changes observed in the foot of patients wearing the orthosis. The GRF was recorded using a force plate for each walking trial. Throughout the stance phase, two components of the GRF vectors, in vertical and anterior–posterior directions, were analysed. The magnitude of the GRF component was normalised according to the body weight of each individual. The same participants were respectively tested without orthosis (Barefoot) and with orthosis (3DP_orthosis). SPSS Statistics 20.0 (IBM Corporation, Armank, NY, USA) was used for statistical analysis. A paired sample t test was performed to compare the difference between the Barefoot and 3DP_orthosis; the significance level was set as 0.05.
To figure out the participant’s feelings, the study also conducted a comfort score to inquire about the participant’s response. The comfort score ranged from 0 to 10 points. The 5 points score meant that the participant felt normal and did not experience any notable feelings. The points 0 and 10 respectively represented very painful and comfortable.
3. Results
3.1. Abduction Angle of Metatarsophalangeal Joint
The mean abduction angle was 26.5° ± 4.9° among patients in the barefoot group under static standing. The mean valgus angle among patients in the 3DP_orthosis group was 15.6 ± 4.8°, which was significantly decreased after orthosis-mediated correction under static standing. During dynamic walking, the highest abduction angle was noted at 90–100% of the stance phase (Figure 3). The peak valgus motion was significantly decreased by approximately 9.3° (barefoot: 24.5 ± 1.02°; 3DP_orthosis: 15.2 ± 8.8°) for participants wearing the 3D-printed orthosis in the preswing phase (p < 0.05).
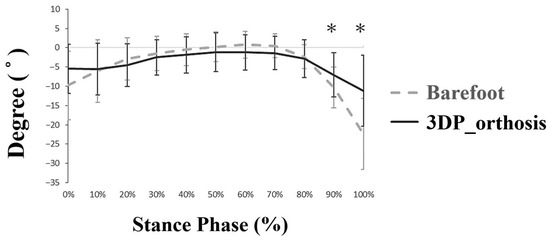
Figure 3.
Variation in the abduction angles during the stance phase of gait. Note: “*”: significant difference; “+”: adduction; “−”: abduction.
3.2. Dorsiflexion Angle of Metatarsophalangeal Joint
The hallux segment of the orthosis users was in a relatively dorsiflexed position during 20–80% of the stance phase, as shown in Figure 4. The slope of the temporal curve was observed to increase in the late stance phase. The mean dorsiflexion angle was highest during 90–100% of the stance phase. The range of dorsiflexion motion decreased for participants wearing the orthosis, but the difference did not reach a significant level during 100% of the stance phase (barefoot: 47.1° ± 7.8°; 3DP_orthosis: 37.5° ± 12.9°).
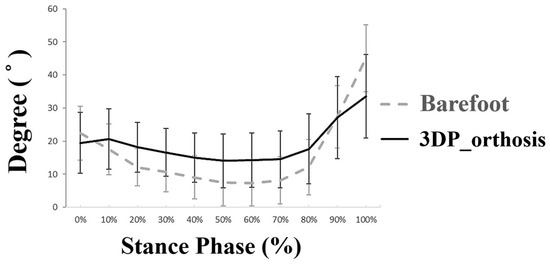
Figure 4.
Variation in dorsiflexion angles during the stance phase of gait.
3.3. GRF
In a normal gait pattern, the GRF contains two peak forces. In the stance phase of the gait cycle, the first peak GRF (Fz1) and second peak GRF (Fz2) were compared between the barefoot and 3DP_orthosis groups, as shown in Table 1; no significant difference was observed between the two groups. Under the application of the antro-posterior force, both groups exhibited the same GRF, which indicated that the 3DP_orthosis group was not affected by the propulsion force during walking.

Table 1.
Comparison of the maximum ground reaction force (GRF) between the barefoot group and the 3DP_orthosis group.
3.4. Comfort Score
The comfort score of the participant was 4.5 ± 0.5 points. There was no participant that felt very uncomfortable while wearing the 3D printed orthosis.
4. Discussion
An orthosis, which is an insole with toe separators, and night splints are commonly used for painful foot disorders. Previous evaluations of different conservative treatments have focused on the HV angle and symptom improvement, and the effects of using orthoses or insoles on pain reduction have been reported [3]. In addition, a few studies have assessed the effectiveness of orthotic management in controlling valgus deformity [2,4]. Tehraninasr et al. [5] used toe separators incorporating an insole or night splint but reported unfavourable outcomes for deformity correction. In addition, a Cochrane review conducted on conservative interventions indicated that neither a foot orthosis nor a night splint is more beneficial than no treatment [12]. These results indicate that the effectiveness of foot orthoses in preventing or reducing the HV angle varies.
In the development of a 3D-printed orthosis, the hallux is maintained in a relatively dorsiflexed position by using the orthosis from the middle to terminal stance. This hallux position is attributable to the orthosis with inherent thickness. In 3D printing, the orthosis thickness was controlled to 2.5 mm. The sagittal motion pattern observed in this study agrees with that observed previously [13]. An increased dorsiflexion movement is probably related to the first-ray hypermobility in the pre-swing phase. The dorsiflexion range is restricted by the loop design of the HV orthosis; however, the degree of limitation did not significantly interfere with push-off.
The kinetic study showed consistent temporal patterns of horizontal and vertical components, which correspond to those obtained in a previous study conducted on GRF [14]. The participants in this study did not find any change in the peak reaction force after wearing the orthosis. According to sagittal motion analysis, use of the orthosis does not interfere with the initial loading response or subsequent push-off throughout the stance phase of gait.
This study investigated the application of a hallux orthosis to control valgus deformity. An immediate reduction in the abduction angle was noted during static standing. The 3D-printed orthosis applied the bending moment using a strap to ensure static angle correction and could instantly prevent excessive valgus motion. In addition, regular night splints are commonly used in a static manner with no dynamic correction. However, the wearers of such night splints often experience discomfort due to the rigidity of the material. Thus, this study applied a soft material to print an HV orthosis, which allows the user to walk normally while retaining HV correction. However, changing the 3D printing material can yield different HV correction effects for users: a stiffer material offers better correction effects but at the expense of user comfort. Therefore, identification of an appropriate 3D printing material is necessary in the future.
The 3D-printed orthosis developed in this study has some advantages over existing orthotic devices. Regarding the cost, the hallux orthosis weighs approximately 23–40 g, and the material costs less than US$3. If the patient wants to fabricate the 3D printed orthosis, the manufacturing cost is about US$6. However, the price of prefabricated orthoses ranged from US$10 to US$40 in the Taiwanese market. Therefore, the 3D printed orthosis is inexpensive. Regarding its function, the patients always complain that prefabricated orthosis is too soft to correct the HV angle or too hard to use for walking. As a result, the semi-rigid material to fabricate HV orthosis is very important. In the experiment, this 3D printed orthosis reached a goal of correcting the HV angle and enabling walking smoothly. The use of a soft and resilient material can make the device durable for continuous use and is potentially inexpensive compared with currently available custom-made orthoses.
Regarding the study, there were some limitations that need to be noted:
- (1)
- The aim of this research was to verify the immediate effects of using 3D-printed hallux orthoses. We only recruited 12 feet to undergo gait analysis. The number of participants should be increased in future studies.
- (2)
- The additive manufacturing method is not the same as the traditional manufacturing method. Its weakness exists in between layers and layers. Therefore, the longevity of the 3D printed orthosis should be verified by a fatigue test. Additionally, its stiffness should be further measured for understanding its mechanical behavior.
- (3)
- We did not analyse whether long-term usage could correct the HV angle permanently. The long-term outcome of deformity correction must be radiologically assessed after continual orthosis treatment.
- (4)
- This study fabricated the orthosis with a thickness of 2.5 mm. The reason for choosing this value is that it simplified the printing process; a lower thickness could lead to a failure in 3D printing. Therefore, the development of 3D printing materials is crucial for printing orthoses in the future.
5. Conclusions
This study applied 3D printing technology to develop a new soft hallux orthosis, which could correct the HV angle by approximately 10.9° during static standing and by approximately 9.3° during walking. However, the 3D-printed orthosis did not affect the GRF of gait. Therefore, it is feasible for use among individuals with HV.
Author Contributions
Conceptualization, C.-S.C. and S.-L.S.; methodology, C.-S.C. and K.-W.L.; investigation, Y.-Y.C.; resources, P.-C.S.; writing—original draft preparation, P.-C.S.; writing—review and editing, S.-L.S.; supervision, C.-S.C.; All authors have read and agreed to the published version of the manuscript.
Funding
The study was partly supported by a Grant (MOST 109-2622-E-010-003) from the Ministry of Science and Technology.
Institutional Review Board Statement
The study was conducted according to the guidelines of the Declaration of Helsinki, and approved by the Institutional Review Board of National Yang-Ming University (protocol code YM107023E-1, 23 April 2019).
Informed Consent Statement
Informed consent was obtained from all subjects involved in the study.
Data Availability Statement
The data presented in this study are available on request from the corresponding author.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Nix, S.; Smith, M.D.; Vicenzino, B. Prevalence of hallux valgus in the general population: A systematic review and meta-analysis. J. Foot Ankle Res. 2010, 3, 21. [Google Scholar] [CrossRef] [PubMed]
- Doty, J.F.; Alvarez, R.G.; Ervin, T.B.; Heard, A.; Gilbreath, J.; Richardson, N.S. Biomechanical Evaluation of Custom Foot Orthoses for Hallux Valgus Deformity. J. Foot Ankle Surg. 2015, 54, 852–855. [Google Scholar] [CrossRef] [PubMed]
- Tang, S.F.; Chen, C.P.; Pan, J.-L.; Chen, J.-L.; Leong, C.-P.; Chu, N.-K. The effects of a new foot-toe orthosis in treating painful hallux valgus. Arch. Phys. Med. Rehabil. 2002, 83, 1792–1795. [Google Scholar] [CrossRef] [PubMed]
- Reina, M.; Lafuente, G.; Munuera-Martínez, P.V. Effect of custom-made foot orthoses in female hallux valgus after one-year follow up. Prosthet. Orthot. Int. 2013, 37, 113–119. [Google Scholar] [CrossRef] [PubMed]
- Tehraninasr, A.; Saeedi, H.; Forogh, B.; Bahramizadeh, M.; Keyhani, M.R. Effects of insole with toe-separator and night splint on patients with painful hallux valgus: A comparative study. Prosthet. Orthot. Int. 2008, 32, 79–83. [Google Scholar] [CrossRef] [PubMed]
- Cha, Y.H.; Kim, S.J.; Lee, K.H.; Kwon, J.Y.; Kim, D.H.; Seo, A.; Kim, S.J. Designing personalized toe spreaders for hallux valgus with three-dimensional scanning and printing. J. Biomed. Eng. Biosci. 2018, 5, 1–6. [Google Scholar]
- Cha, Y.H.; Lee, K.H.; Ryu, H.J.; Joo, I.W.; Seo, A.; Kim, D.-H.; Kim, S.J. Ankle-Foot Orthosis Made by 3D Printing Technique and Automated Design Software. Appl. Bionics Biomech. 2017, 2017, 1–6. [Google Scholar] [CrossRef] [PubMed]
- Xu, R.; Wang, Z.; Ma, T.; Ren, Z.; Jin, H. Effect of 3D Printing Individualized Ankle-Foot Orthosis on Plantar Biomechanics and Pain in Patients with Plantar Fasciitis: A Randomized Controlled Trial. Med. Sci. Monit. 2019, 25, 1392–1400. [Google Scholar] [CrossRef] [PubMed]
- Lin, K.-W.; Hu, C.-J.; Yang, W.-W.; Chou, L.-W.; Wei, S.-H.; Chen, C.-S.; Sun, P.-C. Biomechanical Evaluation and Strength Test of 3D-Printed Foot Orthoses. Appl. Bionics Biomech. 2019, 2019, 1–8. [Google Scholar] [CrossRef] [PubMed]
- Richardson, E.G.; Graves, S.C.; McClure, J.T.; Boone, R.T. First Metatarsal Head-Shaft Angle: A Method of Determination. Foot Ankle 1993, 14, 181–185. [Google Scholar] [CrossRef] [PubMed]
- Leardini, A.; Benedetti, M.; Berti, L.; Bettinelli, D.; Nativo, R.; Giannini, S. Rear-foot, mid-foot and fore-foot motion during the stance phase of gait. Gait Posture 2007, 25, 453–462. [Google Scholar] [CrossRef]
- Nix, S.; Vicenzino, B.; Collins, N.J.; Smith, M.D. Characteristics of foot structure and footwear associated with hallux valgus: A systematic review. Osteoarthr. Cartil. 2012, 20, 1059–1074. [Google Scholar] [CrossRef]
- Deschamps, K.; Birch, I.; Desloovere, K.; Matricali, G.A. The impact of hallux valgus on foot kinematics: A cross-sectional, comparative study. Gait Posture 2010, 32, 102–106. [Google Scholar] [CrossRef]
- Ballas, R.; Edouard, P.; Philippot, R.; Farizon, F.; Delangle, F.; Peyrot, N. Ground-reactive forces after hallux valgus surgery: Comparison of scarf osteotomy and arthrodesis of the first metatarsophalangeal joint. Bone Jt. J. 2016, 98, 641–646. [Google Scholar] [CrossRef] [PubMed]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).