
Learning to Localise Automated Vehicles in Challenging Environments Using Inertial Navigation Systems (INS)




Abstract
1. Introduction
2. Problem Description and Formulation (INS Motion Model)
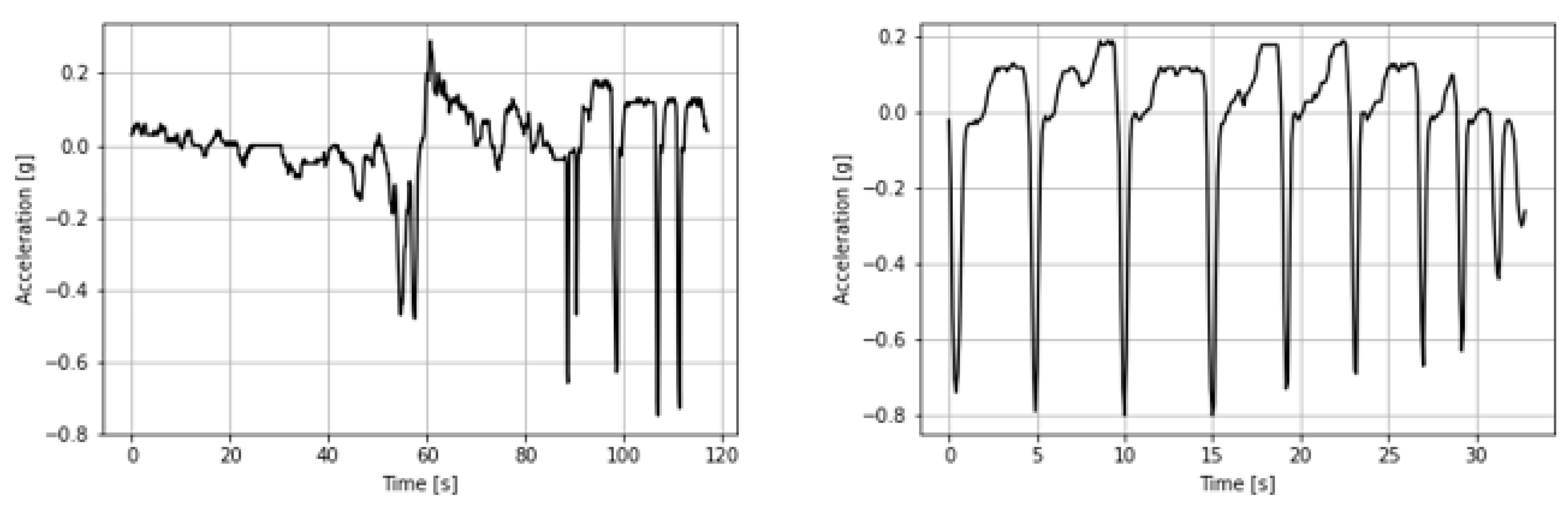
- Hard brake—According to Reference [20], hard brakes are characterised by a longitudinal deceleration of ≤−0.45 g. They occur when the brake pad of the vehicle has a large force applied to it. The sudden halt to the motion of the vehicle leads to a steep decline in the velocity of the vehicle, thus making it difficult to predict the vehicle coming to a stop and to track the motion of the vehicle thereafter. This scenario poses a major challenge to the displacement estimation of the vehicle.
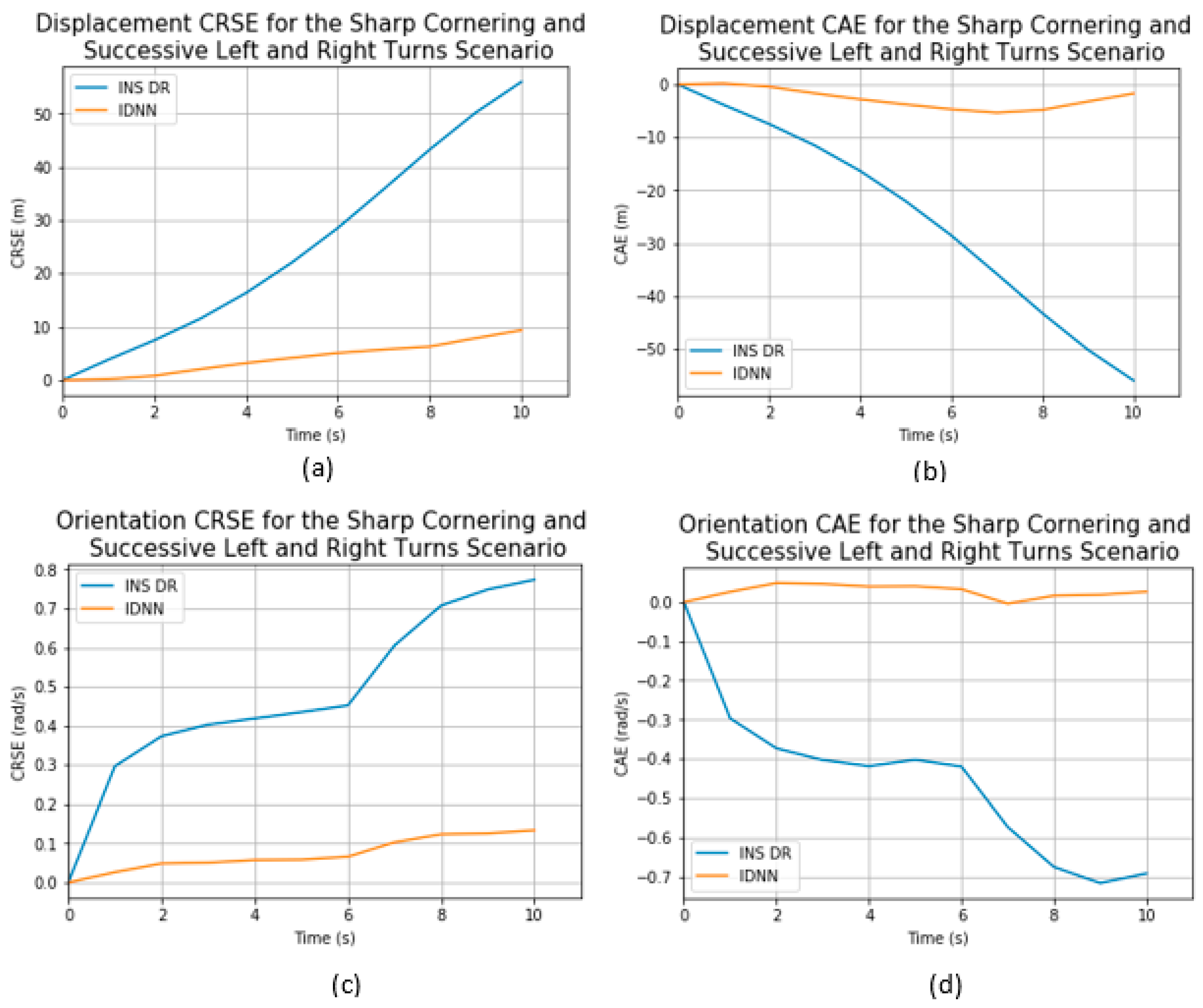
- Sharp cornering and successive left and right turn—The sudden and consecutive change in the direction of the vehicle also poses a challenge to the orientation estimation of the vehicle. The INS struggles to accurately capture the sudden sharp changes to the orientation of the vehicle as well as continuous consecutive changes to the vehicle in relatively short periods of time.
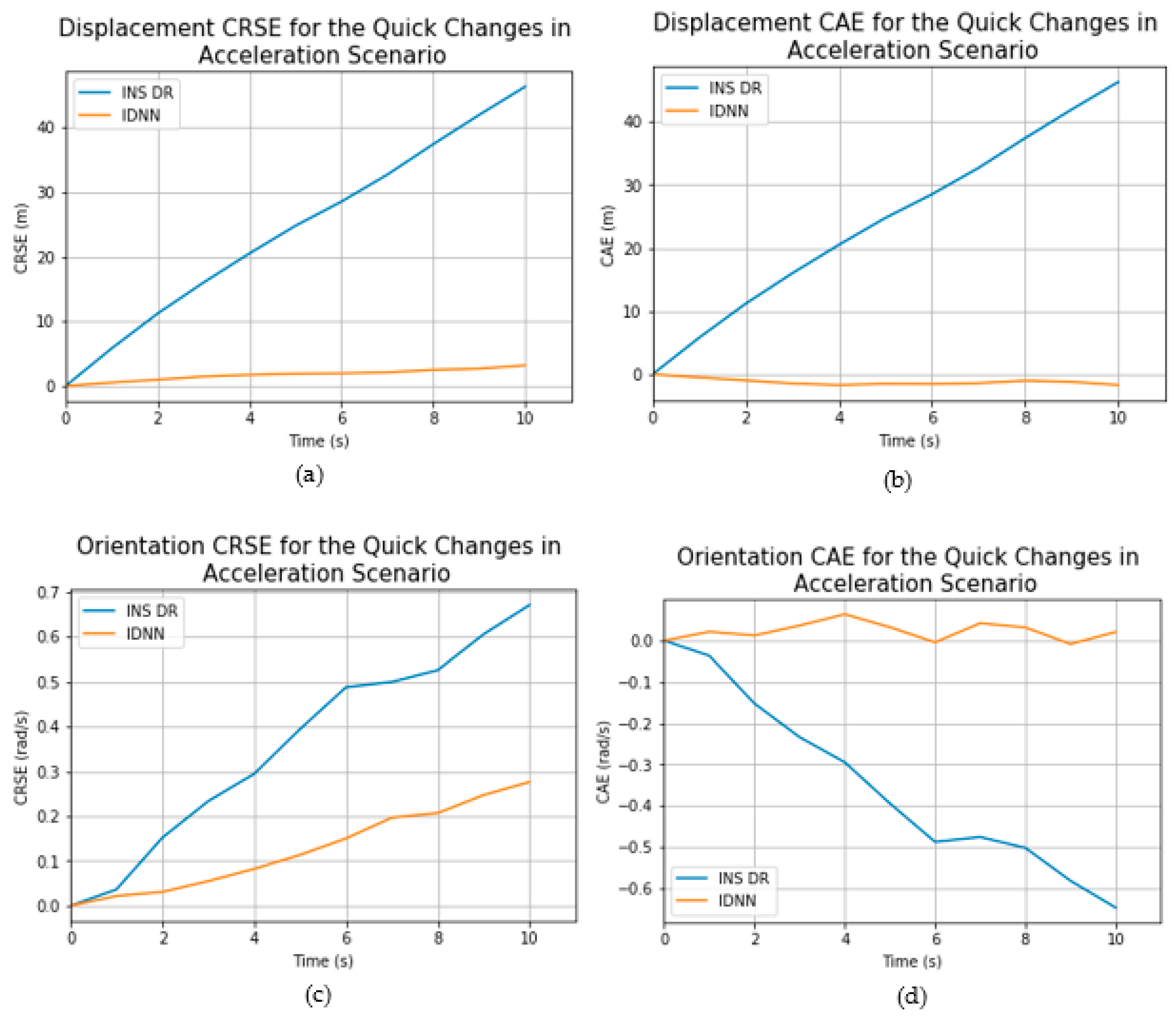
- Changes in acceleration (Jerk)—The accuracy of the displacement estimation of the INS is affected by quick and varied changes to the acceleration of the vehicle within a short period of time. This is particularly a challenge as the INS struggles to capture the quick change in the vehicle’s displacement thereafter.
- Roundabout—Roundabouts present a particular struggle due to its shape. The circular and unidirectional traffic flow makes it a challenge to track the vehicle’s orientation and displacement particularly due to the continuous change in the vehicle’s direction whilst navigating the roundabout. Different roundabout sizes were considered in this study.
2.1. INS/GNSS Motion Model
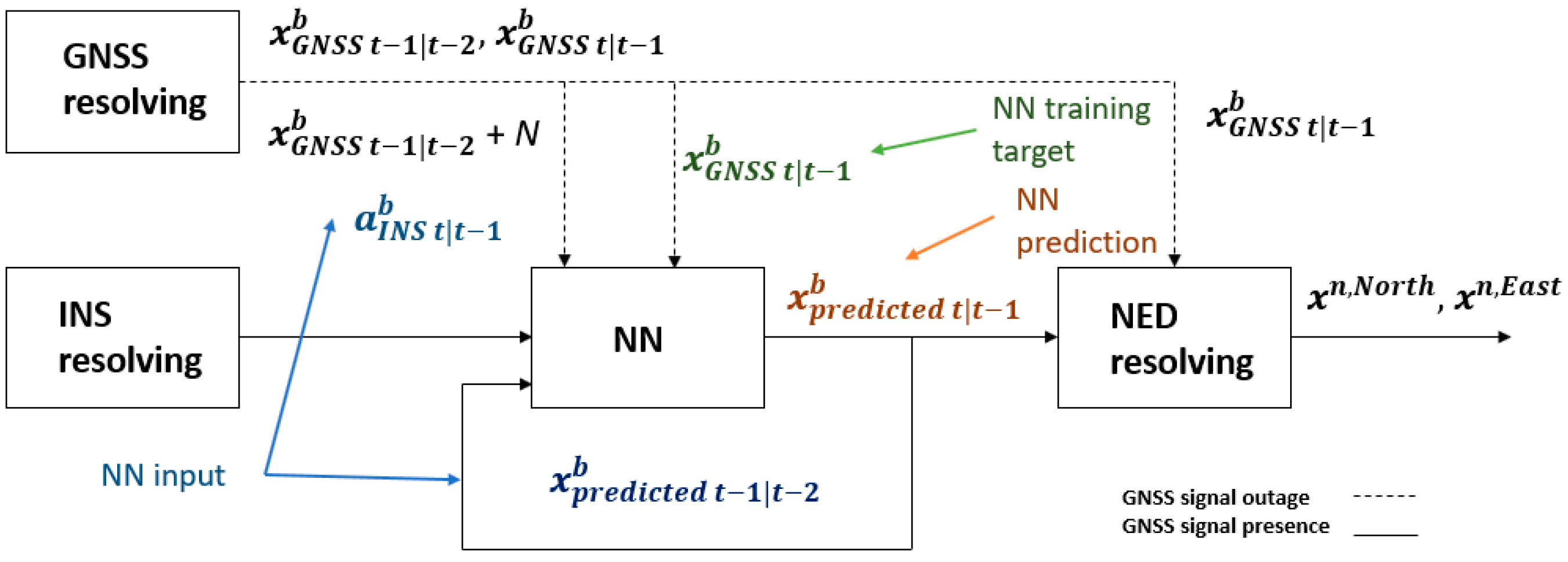
2.2. Neural Network Localisation Scheme Set-Up
3. Data Collection, Experimental Setup and NN Model Selection
3.1. Dataset
3.1.1. Performance Evaluation Metrics
3.1.2. Neural Network Comparative Analysis
3.1.3. Training of the IDNN Model
3.1.4. Testing of the IDNN Model
4. Results and Discussion
4.1. Motorway Scenario
4.2. Roundabout Scenario
4.3. Quick Changes in Vehicles Acceleration Scenario
4.4. Hard Brake Scenario
4.5. Sharp Cornering and Successive Left–Right Turns Scenario
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A



References
- Onyekpe, U.; Kanarachos, S.; Palade, V.; Christopoulos, S.G. Vehicular Localisation at High and Low Estimation Rates during GNSS Outages: A Deep Learning Approach. Deep Learning Applications, Volume 2. Advances in Intelligent Systems and Computing, Vol 1232; Arif Wani, V.P.M., Taghi, K., Eds.; Springer Singapore: Singapore, 2020; pp. 229–248. [Google Scholar]
- Teschler, L. Inertial Measurement Units will Keep Self-Driving Cars on Track. 2018. Available online: https://www.microcontrollertips.com/inertial-measurement-units-will-keep-self-driving-cars-on-track-faq/ (accessed on 5 June 2019).
- Santos, G.A.; Da Costa, J.P.C.L.; De Lima, D.V.; Zanatta, M.D.R.; Praciano, B.J.G.; Pinheiro, G.P.M.; De Mendonca, F.L.L.; De Sousa, R.T. Improved localization framework for autonomous vehicles via tensor and antenna array based GNSS receivers. In Proceedings of the 2020 Workshop on Communication Networks and Power Systems (WCNPS), Brasilia, Brazil, 12–13 November 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Nawrat, A.; Jedrasiak, K.; Daniec, K.; Koteras, R. Inertial Navigation Systems and Its Practical Applications. In New Approach of Indoor and Outdoor Localization Systems; Elbakhar, F., Ed.; InTechOpen: London, UK, 2012. [Google Scholar]
- Chen, C.; Lu, X.; Markham, A.; Trigoni, N. IONet: Learning to Cure the Curse of Drift in Inertial Odometry. arXiv 2018, arXiv:1802.02209. [Google Scholar]
- Noureldin, A.; El-Shafie, A.; Bayoumi, M. GPS/INS integration utilizing dynamic neural networks for vehicular navigation. Inf. Fusion 2011, 12, 48–57. [Google Scholar] [CrossRef]
- Aftatah, M.; Lahrech, A.; Abounada, A.; Soulhi, A. GPS/INS/Odometer Data Fusion for Land Vehicle Localization in GPS Denied Environment. Mod. Appl. Sci. 2016, 11, 62. [Google Scholar] [CrossRef]
- Mikov, A.; Panyov, A.; Kosyanchuk, V.; Prikhodko, I. Sensor Fusion For Land Vehicle Localization Using Inertial MEMS and Odometry. In Proceedings of the 2019 IEEE International Symposium on Inertial Sensors and Systems (INERTIAL), Naples, FL, USA, 1–5 April 2019; pp. 1–2. [Google Scholar] [CrossRef]
- Malleswaran, M.; Vaidehi, V.; Jebarsi, M. Neural networks review for performance enhancement in GPS/INS integration. In Proceedings of the 2012 International Conference on Recent Trends in Information Technology, Chennai, India, 19–21 April 2012; pp. 34–39. [Google Scholar] [CrossRef]
- Malleswaran, M.; Vaidehi, V.; Mohankumar, M. A hybrid approach for GPS/INS integration using Kalman filter and IDNN. In Proceedings of the 2011 Third International Conference on Advanced Computing, Chennai, India, 14–16 December 2011; pp. 378–383. [Google Scholar] [CrossRef]
- Malleswaran, M.; Vaidehi, V.; Sivasankari, N. A novel approach to the integration of GPS and INS using recurrent neural networks with evolutionary optimization techniques. Aerosp. Sci. Technol. 2014, 32, 169–179. [Google Scholar] [CrossRef]
- Malleswaran, M.; Vaidehi, V.; Deborah, S.A. CNN based GPS/INS data integration using new dynamic learning algorithm. In Proceedings of the 2011 International Conference on Recent Trends in Information Technology (ICRTIT) 2011, Chennai, India, 3–5 June 2011; pp. 211–216. [Google Scholar] [CrossRef]
- Chen, C.; Lu, X.; Wahlstrom, J.; Markham, A.; Trigoni, N. Deep Neural Network Based Inertial Odometry Using Low-cost Inertial Measurement Units. IEEE Trans. Mob. Comput. 2019, 1. [Google Scholar] [CrossRef]
- Brossard, M.; Barrau, A.; Bonnabel, S. AI-IMU Dead-Reckoning. IEEE Trans. Intell. Veh. 2020, 5, 585–595. [Google Scholar] [CrossRef]
- Malleswaran, M.; Vaidehi, V.; Saravanaselvan, A.; Mohankumar, M. Performance analysis of various artificial intelligent neural networks for gps/ins integration. Appl. Artif. Intell. 2013, 27, 367–407. [Google Scholar] [CrossRef]
- Chiang, K.-W. The Utilization of Single Point Positioning and Multi-Layers Feed-Forward Network for INS/GPS Integration. Available online: https://www.ion.org/publications/abstract.cfm?articleID=5201 (accessed on 5 June 2019).
- Sharaf, R.; Noureldin, A.; Osman, A.; El-Sheimy, N. Online INS/GPS integration with a radial basis function neural network. IEEE Aerosp. Electron. Syst. Mag. 2005, 20, 8–14. [Google Scholar] [CrossRef]
- Dai, H.-F.; Bian, H.-W.; Wang, R.-Y.; Ma, H. An INS/GNSS integrated navigation in GNSS denied environment using recurrent neural network. Def. Technol. 2020, 16, 334–340. [Google Scholar] [CrossRef]
- Fang, W.; Jiang, J.; Lu, S.; Gong, Y.; Tao, Y.; Tang, Y.; Yan, P.; Luo, H.; Liu, J. A LSTM Algorithm Estimating Pseudo Measurements for Aiding INS during GNSS Signal Outages. Remote. Sens. 2020, 12, 256. [Google Scholar] [CrossRef]
- Simons-Morton, B.G.; Ouimet, M.C.; Wang, J.; Klauer, S.G.; Lee, S.E.; Dingus, T.A. Hard Braking Events Among Novice Teenage Drivers By Passenger Characteristics. In Proceedings of the International Driving Symposium on Human Factors in Driver Assessment, Training, and Vehicle Design, Santa Fe, NM, USA, 24–27 June 2009; Volume 2009, pp. 236–242. [Google Scholar] [CrossRef]
- Kok, M.; Hol, J.D.; Schön, T.B. Using Inertial Sensors for Position and Orientation Estimation. Found. Trends Signal Process. 2017, 11, 1–153. [Google Scholar] [CrossRef]
- VBOX Video HD2. Available online: https://www.vboxmotorsport.co.uk/index.php/en/products/video-loggers/vbox-video (accessed on 26 February 2020).
- Pietrzak, M. Vincenty · PyPI. Available online: https://pypi.org/project/vincenty/ (accessed on 12 April 2019).
- Onyekpe, U.; Palade, V.; Kanarachos, S.; Szkolnik, A. IO-VNBD: Inertial and Odometry Benchmark Dataset for Ground Vehicle Positioning. arXiv 2020, arXiv:2005.01701. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| IO-VNB Dataset | Features |
|---|---|
| V-Vta1a | Wet Road, Gravel Road, Country Road, Sloppy Roads, Round About (×3), Hard Brake on wet road, Tyre Pressure A |
| V-Vta2 | Round About (×2), A Road (A511, A5121, A444), Country Road, Hard Brake, Tyre Pressure A |
| V-Vta8 | Town Roads (Build-up), A-Roads (A511), Tyre Pressure A |
| V-Vta10 | Round About (×1), A—Road (A50), Tyre Pressure A |
| V-Vta16 | Round-About (×3), Hilly Road, Country Road, A-Road (A515), Tyre Pressure A |
| V-Vta17 | Hilly Road, Hard-Brake, Stationary (No Motion), Tyre Pressure A |
| V-Vta20 | Hilly Road, Approximate Straight-line travel, Tyre Pressure A |
| V-Vta21 | Hilly Road, Tyre Pressure A |
| V-Vta22 | Hilly Road, Hard Brake, Tyre Pressure A |
| V-Vta27 | Gravel Road, Several Hilly Road, Potholes, Country Road, A-Road (A515), Tyre Pressure A |
| V-Vta28 | Country Road, Hard Brake, Valley, A-Road (A515) |
| V-Vta29 | Hard Brake, Country Road, Hilly Road, Windy Road, Dirt Road, Wet Road, Reverse (×2), Bumps, Rain, B-Road (B5053), Country Road, U-Turn (×3), Windy Road, Valley, Tyre Pressure A |
| V-Vta30 | Rain, Wet Road, U-Turn (×2), A-Road (A53, A515), Inner Town Driving, B-Road (B5053), Tyre Pressure A |
| V-Vtb1 | Valley, rain, Wet-Road, Country Road, U-T urn (×2), Hard-Brake, Swift-Manoeuvre, A—Road (A6, A6020, A623, A515), B-Road (B6405), Round About (×3), day Time, Tyre Pressure A |
| V-Vtb2 | Country Road, Wet Road, Dirt Road, Tyre Pressure A |
| V-Vtb3 | Reverse, Wet Road, Dirt Road, Gravel Road, Night-time, Tyre Pressure A |
| V-Vtb5 | Dirt Road, Country Road, Gravel Road, Hard Brake, Wet Road, B Road (B6405, B6012, B5056), Inner Town Driving, A-Road, Motorway (M42, M1), Rush hour(Traffic) Round-About (×6), A-Road (A5, A42, A38, A615, A6), Tyre Pressure A |
| V-Vw4 | Round-About (×77), Swift-Manoeuvres, Hard-Brake, Inner City Driving, Reverse, A-Road, Motorway (M5, M40, M42), Country Road, Successive Left-Right Turns, Daytime, U-Turn (×3), Tyre Pressure D |
| V-Vw5 | Successive Left-Right Turns, Daytime, Sharp Turn Left/Right, Tyre Pressure D |
| V-Vw14b | Motorway (M42), Night-time, Tyre Pressure D |
| V-Vw14c | Motorway (M42), Round About (×2), A-Road (A446), Night-time, Hard Brake, Tyre Pressure D |
| V-Vfa01 | A-Road (A444), Round About (×1), B–Road (B4116) Day Time, Hard Brake, Tyre Pressure A |
| V-Vfa02 | B-Road (B4116), Round About (×5), A Road (A42, A641), Motorway (M1, M62) High Rise Buildings, Hard Brake, Tyre Pressure C |
| V-Vfb01a | City Centre Driving, Round-About (×1), Wet Road, Ring Road, Night, Tyre Pressure C |
| V-Vfb01b | Motorway (M606), Round-About (×1), City Roads Traffic, Wet Road, Changes in Acceleration in Short Periods of Time, Night, Tyre Pressure C |
| V-Vfb02b | Round About (×1), Bumps, Successive Left Right Turns, Hard-Brake (×7), Zig-zag (×6), Night, Tyre Pressure D |
| Scenario | IO-VNB Data Subset | Total Time Driven, Distance Covered, Velocity and Acceleration |
|---|---|---|
| Motorway | V-Vw12 | 1.75 min, 2.64 km, 82.6–97.4 km/h, −0.06 to +0.07 g |
| Challenging Scenarios | IO-VNB Data Subset | Total Time Driven, Distance Covered, Velocity and Acceleration |
|---|---|---|
| Roundabout | V-Vta11 | 1.0 min, 0.92 km, 26.8–97.7 km/h, −0.45 to +0.15 g |
| V-Vfb02d | 1.5 min, 0.84 km, 0.0–57.3 km/h, −0.33 to +0.31 g | |
| Changes in acceleration | V-Vfb02e | 1.6 min, 1.52 km, 37.4–73.9 km/h, −0.24 to +0.19 g |
| V-Vta12 | 1.0 min, 1.27 km, 44.7–85.3 km/h, 0.44 to +0.13 g | |
| Hard Brake | V-Vw16b | 2.0 min, 1.99 km, 1.3–86.3 km/h, −0.75 to +0.29 g |
| V-Vw17 | 0.5 min, 0.54 km, 31.5–72.7 km/h, −0.8 to +0.19 g | |
| V-Vta9 | 0.4 min, 0.43 km, 48.9–87.7 km/h, −0.6 to +0.14 g | |
| Sharp Cornering and Successive left and right turns | V-Vw6 | 2.1 min, 1.08 km, 3.3–40.7 km/h, −0.34 to +0.26 g |
| V-Vw7 | 2.8 min, 1.23 km, 0.4–42.2 km/h, −0.37 to +0.37 g | |
| V-Vw8 | 2.7 min, 1.12 km, 0.0–46.4 km/h, −0.37 to +0.27 g |
| Number of Weighted Connections | Number of Trainable Parameters | ||||
|---|---|---|---|---|---|
| MLNN (2-Layer) | vRNN (2-Layer) | GRU (2-Layer) | LSTM (2-Layer) | IDNN (2-Layer) | |
| 8 | 33 | 65 | 185 | 245 | 65 |
| 16 | 97 | 225 | 657 | 873 | 161 |
| 32 | 321 | 833 | 2465 | 3281 | 449 |
| 64 | 1153 | 3201 | 9537 | 2705 | 1409 |
| 128 | 4353 | 12,545 | 37,505 | 49,985 | 4865 |
| 192 | 9601 | 28,033 | 83,905 | 111,841 | 10,369 |
| 256 | 16,897 | 49,665 | 148,737 | 198,273 | 17,921 |
| 320 | 26,241 | 77,441 | 232,001 | 309,281 | 27,521 |
| Number of Time Steps | Motorway (Rad/s) | Roundabout (Rad/s) | Quick Changes in Vehicle Acceleration (Rad/s) | Hard Brake (Rad/s) | Sharp Cornering (Rad/s) |
|---|---|---|---|---|---|
| 2 | 0.05 | 0.41 | 0.38 | 0.28 | 0.52 |
| 3 | 0.06 | 0.62 | 0.33 | 0.33 | 0.56 |
| 4 | 0.06 | 0.59 | 0.34 | 0.35 | 0.51 |
| 5 | 0.06 | 0.60 | 0.38 | 0.34 | 0.41 |
| 6 | 0.05 | 0.61 | 0.39 | 0.35 | 0.43 |
| 7 | 0.05 | 0.63 | 0.37 | 0.32 | 0.47 |
| 8 | 0.05 | 0.60 | 0.37 | 0.32 | 0.46 |
| 9 | 0.05 | 0.60 | 0.35 | 0.34 | 0.45 |
| 10 | 0.06 | 0.61 | 0.35 | 0.28 | 0.51 |
| 11 | 0.06 | 0.58 | 0.36 | 0.25 | 0.50 |
| 12 | 0.05 | 0.38 | 0.38 | 0.28 | 0.51 |
| 13 | 0.06 | 0.62 | 0.33 | 0.32 | 0.51 |
| 14 | 0.06 | 0.59 | 0.34 | 0.35 | 0.49 |
| NN | Number of Time Steps | Motorway (m) | Roundabout (m) | Quick Changes in Vehicle Acceleration (m) | Hard Brake (m) | Sharp Cornering (m) |
|---|---|---|---|---|---|---|
| IDNN | 2 | 651.41 | 702.17 | 571.99 | 648.57 | 425.56 |
| 4 | 616.60 | 655.22 | 546.76 | 580.01 | 373.03 | |
| 6 | 610.61 | 599.22 | 524.41 | 577.19 | 346.92 | |
| 8 | 592.27 | 595.09 | 474.55 | 557.50 | 292.78 | |
| 10 | 3.60 | 17.96 | 8.71 | 15.80 | 14.55 | |
| 12 | 3.23 | 19.52 | 8.62 | 19.36 | 14.43 | |
| 14 | 3.63 | 20.53 | 9.58 | 20.45 | 12.71 | |
| vRNN | 2 | 17.11 | 55.58 | 33.30 | 64.09 | 42.64 |
| 4 | 7.87 | 47.92 | 22.45 | 51.81 | 25.95 | |
| 6 | 7.28 | 29.10 | 16.56 | 25.28 | 22.58 | |
| 8 | 3.83 | 21.08 | 10.27 | 16.39 | 14.02 | |
| 10 | 3.60 | 17.96 | 8.71 | 15.80 | 14.55 | |
| 12 | 3.23 | 19.52 | 8.62 | 19.36 | 14.43 | |
| 14 | 3.63 | 20.53 | 9.58 | 20.45 | 12.71 | |
| GRU | 2 | 21.19 | 51.54 | 36.66 | 62.04 | 45.82 |
| 4 | 25.01 | 42.62 | 30.11 | 45.05 | 26.19 | |
| 6 | 20.24 | 33.72 | 24.64 | 23.87 | 22.20 | |
| 8 | 11.33 | 24.14 | 15.16 | 17.59 | 15.47 | |
| 10 | 3.60 | 17.96 | 8.71 | 15.80 | 14.55 | |
| 12 | 3.23 | 19.52 | 8.62 | 19.36 | 14.43 | |
| 14 | 3.63 | 20.53 | 9.58 | 20.45 | 12.71 | |
| LSTM | 2 | 32.97 | 54.21 | 34.74 | 60.78 | 37.53 |
| 4 | 18.20 | 41.62 | 26.73 | 51.94 | 28.21 | |
| 6 | 6.19 | 33.82 | 16.48 | 34.68 | 20.39 | |
| 8 | 4.12 | 21.75 | 11.49 | 16.18 | 13.8227 | |
| 10 | 3.60 | 17.96 | 8.71 | 15.80 | 14.55 | |
| 12 | 3.23 | 19.52 | 8.62 | 19.36 | 14.43 | |
| 14 | 3.63 | 20.53 | 9.58 | 20.45 | 12.71 |
| Parameters | Displacement Estimation | Orientation Estimation |
|---|---|---|
| Learning rate | 0.004 | 0.001 |
| Dropout | 10% | 10% |
| Sequence Length | See Table 3 | See Table 2 |
| Hidden layers | 2 | 2 |
| Hidden neurons | 32 per layer | 32 per layer |
| Batch Size | 256 | 256 |
| Epochs | 40 | 60 |
| IDNN (m) | INS DR (m) | IDNN (Rad/s) | INS DR (Rad/s) | ||
|---|---|---|---|---|---|
| CRSE | max | 3.23 | 30.11 | 0.05 | 0.21 |
| min | 0.84 | 1.63 | 0.02 | 0.08 | |
| μ | 1.93 | 15.01 | 0.04 | 0.13 | |
| σ | 0.84 | 9.12 | 0.01 | 0.03 | |
| CAE | max | 2.56 | 30.11 | 0.02 | 0.13 |
| min | 0.19 | 0.04 | 0.00 | 0.04 | |
| μ | 0.96 | 13.33 | 0.01 | 0.10 | |
| σ | 0.84 | 10.17 | 0.01 | 0.03 | |
| AEPS (/s) | max | 0.06 | 0.30 | 0.00 | 0.00 |
| min | 0.00 | 0.01 | 0.00 | 0.00 | |
| μ | 0.02 | 0.15 | 0.00 | 0.00 | |
| σ | 0.02 | 0.10 | 0.00 | 0.00 | |
| Total Distance Covered by vehicle | max | 268.40 | |||
| min | 234.47 | ||||
| μ | 251.29 | ||||
| Number of Sequences evaluated | 9 | ||||
| IDNN (m) | INS DR (m) | IDNN (Rad/s) | INS DR (Rad/s) | ||
|---|---|---|---|---|---|
| CRSE | max | 17.96 | 171.92 | 0.38 | 5.71 |
| min | 2.36 | 19.42 | 0.02 | 0.17 | |
| μ | 8.63 | 78.32 | 0.17 | 1.48 | |
| σ | 5.51 | 52.33 | 0.13 | 1.77 | |
| CAE | max | 16.80 | 171.92 | 0.05 | 2.14 |
| min | 0.5 | 19.42 | 0.00 | 0.03 | |
| μ | 5.47 | −57.60 | 0.01 | 0.62 | |
| σ | 5.35 | 54.20 | 0.02 | 0.76 | |
| AEPS (/s) | max | 0.34 | 1.76 | 0.01 | 0.08 |
| min | 0.00 | 0.23 | 0.00 | 0.00 | |
| μ | 0.10 | 0.89 | 0.00 | 0.02 | |
| σ | 0.10 | 0.49 | 0.00 | 0.03 | |
| Total Distance Covered by vehicle | max | 196.71 | |||
| min | 19.89 | ||||
| μ | 104.93 | ||||
| Number of Sequences evaluated | 11 | ||||
| IDNN (m) | INS DR (m) | IDNN (Rad/s) | INS DR (Rad/s) | ||
|---|---|---|---|---|---|
| CRSE | max | 8.62 | 79.05 | 0.33 | 0.67 |
| min | 2.37 | 17.72 | 0.03 | 0.15 | |
| μ | 5.30 | 38.92 | 0.16 | 0.28 | |
| σ | 2.19 | 16.72 | 0.10 | 0.13 | |
| CAE | max | 3.95 | 79.05 | 0.05 | 0.65 |
| min | 2.37 | 17.72 | 0.00 | 0.00 | |
| μ | 0.93 | 26.23 | 0.02 | 0.18 | |
| σ | 2.83 | 32.44 | 0.01 | 0.17 | |
| AEPS (/s) | max | 0.15 | 0.91 | 0.01 | 0.02 |
| min | 0.01 | 0.02 | 0.00 | 0.00 | |
| μ | 0.05 | 0.43 | 0.00 | 0.00 | |
| σ | 0.03 | 0.25 | 0.00 | 0.00 | |
| Total Distance Covered | max | 220.08 | |||
| min | 137.72 | ||||
| μ | 168.62 | ||||
| Number of Sequences evaluated | 13 | ||||
| IDNN (m) | INS DR (m) | IDNN (Rad/s) | INS DR (Rad/s) | ||
|---|---|---|---|---|---|
| CRSE | max | 15.80 | 133.12 | 0.25 | 1.89 |
| min | 1.15 | 5.74 | 0.03 | 0.06 | |
| μ | 6.82 | 41.07 | 0.09 | 0.37 | |
| σ | 4.23 | 33.75 | 0.08 | 0.48 | |
| CAE | max | 14.75 | 133.12 | 0.05 | 1.17 |
| min | 0.08 | 1.37 | 0.00 | 0.01 | |
| μ | 0.44 | 26.50 | 0.02 | 0.21 | |
| σ | 3.89 | 34.70 | 0.01 | 0.33 | |
| AEPS (/s) | max | 0.21 | 1.97 | 0.00 | 0.01 |
| min | 0.01 | 0.01 | 0.00 | 0.00 | |
| μ | 0.06 | 0.47 | 0.00 | 0.00 | |
| σ | 0.06 | 0.43 | 0.00 | 0.00 | |
| Total Distance Covered | max | 258.79 | |||
| min | 73.39 | ||||
| μ | 188.48 | ||||
| Number of Sequences evaluated | 17 | ||||
| IDNN (m) | INS DR (m) | IDNN (Rad/s) | INS DR (Rad/s) | ||
|---|---|---|---|---|---|
| CRSE | max | 12.71 | 92.06 | 0.41 | 4.29 |
| min | 1.43 | 5.20 | 0.06 | 0.19 | |
| μ | 6.77 | 39.35 | 0.19 | 1.99 | |
| σ | 2.83 | 26.91 | 0.09 | 1.42 | |
| CAE | max | 8.49 | 92.06 | 0.13 | 3.47 |
| min | 0.10 | 2.02 | 0.00 | 0.01 | |
| μ | 0.01 | 11.34 | −0.01 | −0.07 | |
| σ | 2.29 | 28.84 | 0.04 | 2.03 | |
| AEPS (/s) | max | 0.25 | 0.94 | 0.02 | 0.16 |
| min | 0.00 | 0.00 | 0.00 | 0.00 | |
| μ | 0.06 | 0.38 | 0.00 | 0.02 | |
| σ | 0.07 | 0.30 | 0.00 | 0.04 | |
| Total Distance Covered | max | 109 | |||
| min | 21 | ||||
| μ | 75 | ||||
| Number of Sequences evaluated | 40 | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Onyekpe, U.; Palade, V.; Kanarachos, S. Learning to Localise Automated Vehicles in Challenging Environments Using Inertial Navigation Systems (INS). Appl. Sci. 2021, 11, 1270. https://doi.org/10.3390/app11031270
Onyekpe U, Palade V, Kanarachos S. Learning to Localise Automated Vehicles in Challenging Environments Using Inertial Navigation Systems (INS). Applied Sciences. 2021; 11(3):1270. https://doi.org/10.3390/app11031270
Chicago/Turabian StyleOnyekpe, Uche, Vasile Palade, and Stratis Kanarachos. 2021. "Learning to Localise Automated Vehicles in Challenging Environments Using Inertial Navigation Systems (INS)" Applied Sciences 11, no. 3: 1270. https://doi.org/10.3390/app11031270
APA StyleOnyekpe, U., Palade, V., & Kanarachos, S. (2021). Learning to Localise Automated Vehicles in Challenging Environments Using Inertial Navigation Systems (INS). Applied Sciences, 11(3), 1270. https://doi.org/10.3390/app11031270