Piezoelectric Energy Harvesting for Flapping Wing Micro Air Vehicle and Flapping Wing Sensing Based on Flexible Polyvinylidene Fluoride


Abstract
1. Introduction
2. Modeling and Principle
3. Experiment
3.1. Flapping Wing Test Platform
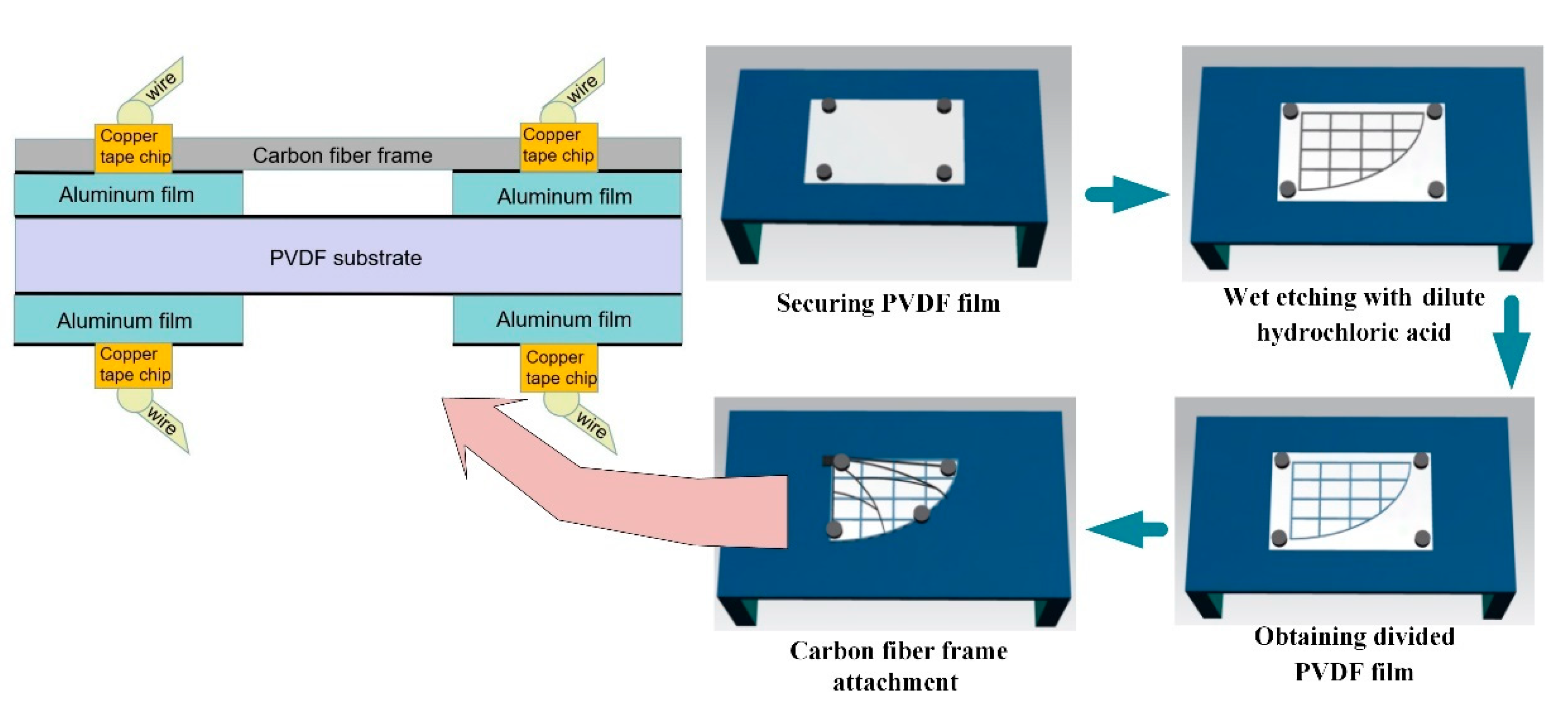
3.2. PVDF Wing Fabrication
- (a).
- A sheet of PVDF film was secured to a stable worktable with the use of magnets.
- (b).
- The PVDF film surface was marked with water according to the designed grid line layout, then used a fine brush with dilute hydrochloric acid carefully draw the grid line trace.
- (c).
- After a minute when the reaction finished, the PVDF film was sprinkled with sodium carbonate powder to neutralize extra dilute hydrochloric acid. Next, the PVDF film was washed with plasma water.
- (d).
- Lastly, the carbon fiber frame was attached to the PVDF film carefully with electrical insulation glue.
3.3. Measuring Device
4. Test and Analysis
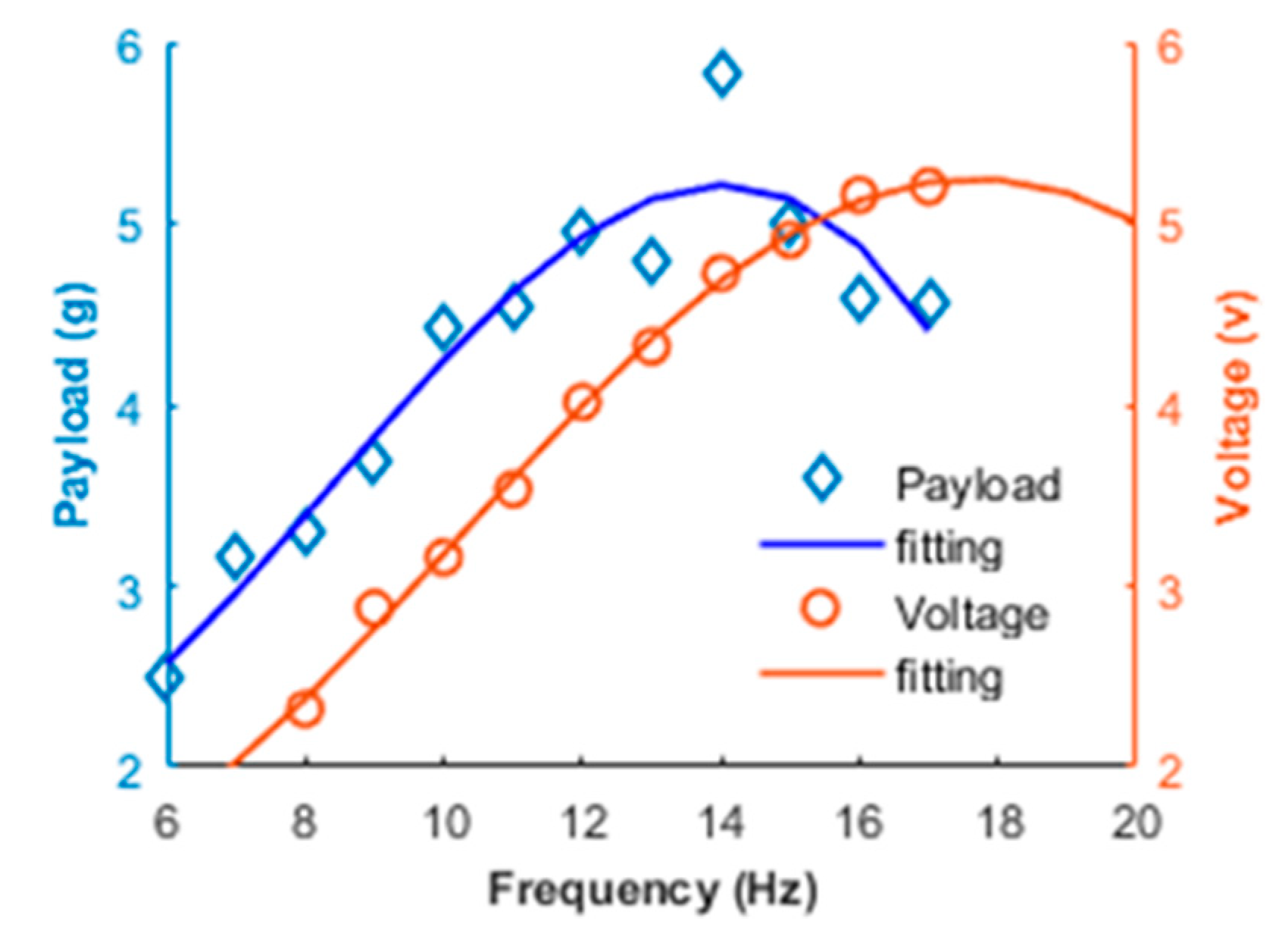
4.1. Lift and Voltage
4.2. Output Power
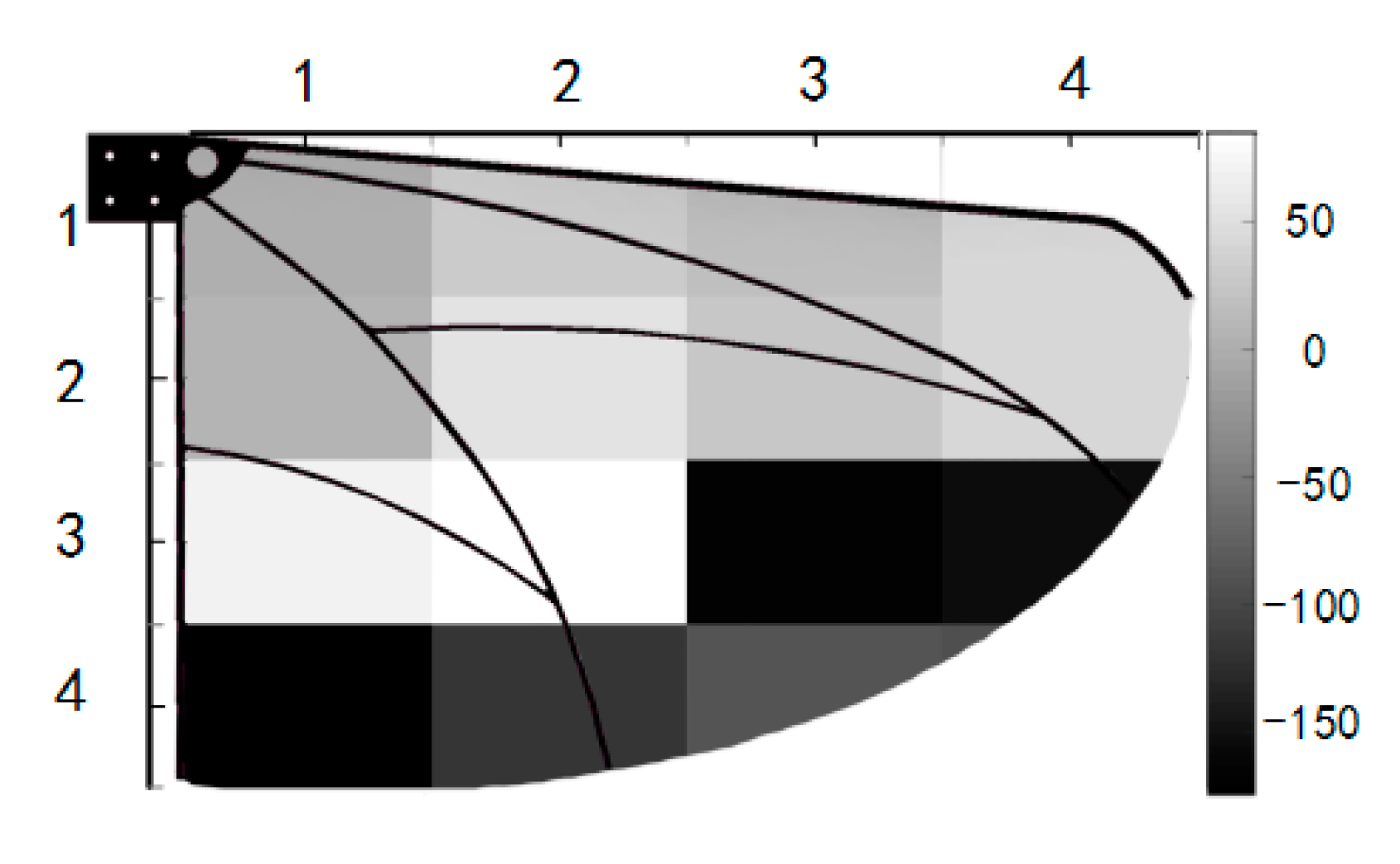
4.3. Segmentation Test
4.4. Energy Havesting
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hundley, R.O.; Gritton, E.C. Future Technology-Driven Revolutions in Military Operations, Results of a Workshop; No. RAND-DB-110-ARPA; RAND Corporation: Santa Monica, CA, USA, 1994. [Google Scholar]
- Ashley, S. Palm-size spy plane. Mech. Eng. 1998, 120, 74–78. [Google Scholar] [CrossRef]
- Wood, R.J. Liftoff of a 60mg flapping-wing MAV. In Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2007; pp. 1889–1894. [Google Scholar]
- Phan, H.V.; Park, H.C. Insect-inspired, tailless, hover-capable flapping-wing robots: Recent progress, challenges, and future directions. Prog. Aerosp. Sci. 2019, 111, 100573. [Google Scholar] [CrossRef]
- Phan, H.V.; Park, H.C. Mimicking nature’s flyers: A review of insect-inspired flying robots. Curr. Opin. Insect Sci. 2020, 42, 70–75. [Google Scholar] [CrossRef] [PubMed]
- Pornsin-Sirirak, T.N.; Tai, Y.C.; Ho, C.M.; Keennon, M. Microbat: A palm-sized electrically powered ornithopter. In Proceedings of the NASA/JPL Workshop on Biomorphic Robotics, Simi Valley, CA, USA, 14–17 August 2001; Volume 14, p. 17. [Google Scholar]
- De Croon, G.C.; Groen, M.A.; De Wagter, C.; Remes, B.; Ruijsink, R.; van Oudheusden, B.W. Design, aerodynamics and autonomy of the DelFly. Bioinspir. Biomim. 2012, 7, 025003. [Google Scholar] [CrossRef] [PubMed]
- Keennon, M.; Klingebiel, K.; Won, H. Development of the nano hummingbird: A tailless flapping wing micro air vehicle. In Proceedings of the 50th AIAA Aerospace Sciences Meeting Including the New Horizons Forum & Aerospace Exposition, Nashville, Tennessee, 9–12 January 2012. [Google Scholar]
- BionicFlyingFox, Ultra-Lightweight Flying Object with Intelligent Kinematics. 2018. Available online: https://www.festo.com/bionics (accessed on 7 October 2020).
- Ansari, S.A.; Żbikowski, R.; Knowles, K. Aerodynamic modelling of insect-like flapping flight for micro air vehicles. Prog. Aerosp. Sci. 2006, 42, 129–172. [Google Scholar] [CrossRef]
- Kumar, V.; Michael, N. Opportunities and challenges with autonomous micro aerial vehicles. Int. J. Robot. Res. 2012, 31, 1279–1291. [Google Scholar] [CrossRef]
- Pines, D.J.; Bohorquez, F. Challenges Facing Future Micro-Air-Vehicle Development. J. Aircr. 2006, 43, 290–305. [Google Scholar] [CrossRef]
- Cox, A.; Monopoli, D.; Cveticanin, D.; Goldfarb, M.; Garcia, E. The Development of Elastodynamic Components for Piezoelectrically Actuated Flapping Micro-Air Vehicles. J. Intell. Mater. Syst. Struct. 2002, 13, 611–615. [Google Scholar] [CrossRef]
- Zhao, J.; Niu, J.; McCoul, D.; Leng, J.; Pei, Q. A rotary joint for a flapping wing actuated by dielectric elastomers: Design and experiment. Meccanica 2015, 50, 2815–2824. [Google Scholar] [CrossRef]
- Joshi, N.; Köhler, E.; Enoksson, P. MEMS Based Micro Aerial Vehicles. J. Phys. Conf. Ser. 2016, 757, 012035. [Google Scholar] [CrossRef]
- Furs, S.J.; Bunget, G.; Seelecke, S. Design and fabrication of a bat-inspired flapping-flight platform using shape memory alloy muscles and joints. Smart Mater. Struct. 2012, 22, 014011. [Google Scholar] [CrossRef]
- Bejgerowski, W.; Ananthanarayanan, A.; Mueller, D.; Gupta, S.K. Integrated Product and Process Design for a Flapping Wing Drive Mechanism. J. Mech. Des. 2009, 131, 061006. [Google Scholar] [CrossRef]
- Gerdes, J.; Holness, A.; Perez-Rosado, A.; Roberts, L.; Greisinger, A.; Barnett, E.; Kempny, J.; Lingam, D.; Yeh, C.H.; Bruck, H.A.; et al. Robo Raven: A flapping-wing air vehicle with highly compliant and independently controlled wings. Soft Robot 2014, 1, 275–288. [Google Scholar] [CrossRef]
- Perez-Rosado, A.; Griesinger, A.J.; Bruck, H.A.; Gupta, S.K. Performance characterization of multifunctional wings with integrated solar cells for miniature air vehicles. In Proceedings of the ASME 2014 International Design Engineering Technical and Computers and Information in Engineering Conference, Buffalo, NY, USA, 17–20 August 2014. [Google Scholar]
- Anton, S.R.; Inman, D.J. Vibration energy harvesting for unmanned aerial vehicles. In Active and Passive Smart Structures and Integrated Systems; International Society for Optics and Photonics: Bellingham, WA, USA, 2008; Volume 6928. [Google Scholar]
- Anton, S.R.; Inman, D.J. Performance modeling of unmanned aerial vehicles with on-board energy harvesting. Act. Passiv. Smart Struct. Integr. Syst. 2011, 7977, 12–27. [Google Scholar]
- Cha, Y.; Hong, J.; Lee, J.; Park, J.-M.; Kim, K. Flexible Piezoelectric Energy Harvesting from Mouse Click Motions. Sensors 2016, 16, 1045. [Google Scholar] [CrossRef]
- Han, Y.; Cao, Y.; Zhao, J.; Yin, Y.; Ye, L.; Wang, X.; You, Z. A Self-Powered Insole for Human Motion Recognition. Sensors 2016, 16, 1502. [Google Scholar] [CrossRef]
- Proto, A.; Penhaker, M.; Bibbo, D.; Vala, D.; Conforto, S.; Schmid, M. Measurements of Generated Energy/Electrical Quantities from Locomotion Activities Using Piezoelectric Wearable Sensors for Body Motion Energy Harvesting. Sensors 2016, 16, 524. [Google Scholar] [CrossRef]
- Yang, L.-J.; Hsu, C.-K.; Ho, J.-Y.; Feng, C.-K. Flapping Wings with PVDF Sensors to Modify the Aerodynamic Forces of a Micro Aerial Vehicle. Sens. Actuators A Phys. 2007, 139, 95–103. [Google Scholar] [CrossRef]
- Yang, L.J.; Feng, C.K.; Hsu, C.K.; Ho, J.Y.; Feng, G.H.; Shih, H.M. A flapping mav micro aerial vehicle with pvdf-parylene composite skin. J. Aeronaut. Astronaut. Aviat. 2007, 39, 195–201. [Google Scholar]
- Tian, F.B.; Luo, H.; Song, J.; Lu, X.Y. Force production and asymmetric deformation of a flexible flapping wing in forward flight. J. Fluids Struct. 2013, 36, 149–161. [Google Scholar] [CrossRef]
- Hassanalian, M.; Throneberry, G.; Abdelkefi, A. Wing shape and dynamic twist design of bio-inspired nano air vehicles for forward flight purposes. Aerosp. Sci. Technol. 2017, 68, 518–529. [Google Scholar] [CrossRef]
- Meng, X.; Sun, M. Wing kinematics, aerodynamic forces and vortex-wake structures in fruit-flies in forward flight. J. Bionic Eng. 2016, 13, 478–490. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Row | 1 | 2 | 3 | 4 | |
|---|---|---|---|---|---|
| Column | |||||
| 1 | 1 | 0.824 | 0.677 | 0.412 | |
| 2 | 1 | 1 | 1 | 0.913 | |
| 3 | 1 | 1 | 1 | 0.741 | |
| 4 | 0.882 | 0.967 | 0.708 | ||
| Row | 1 | 2 | 3 | 4 | |
|---|---|---|---|---|---|
| Column | |||||
| 1 | 30.13 | 20.69 | 9.86 | 4.89 | |
| 2 | 6.11 | 3.14 | 3.39 | 1.13 | |
| 3 | 1.59 | 2.5 | 0.70 | 0.84 | |
| 4 | 1.36 | 1.07 | 0.79 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Q.; Li, Q.; Fang, Z.; Zhou, X.; Wang, R.; Zuo, C. Piezoelectric Energy Harvesting for Flapping Wing Micro Air Vehicle and Flapping Wing Sensing Based on Flexible Polyvinylidene Fluoride. Appl. Sci. 2021, 11, 1166. https://doi.org/10.3390/app11031166
Liu Q, Li Q, Fang Z, Zhou X, Wang R, Zuo C. Piezoelectric Energy Harvesting for Flapping Wing Micro Air Vehicle and Flapping Wing Sensing Based on Flexible Polyvinylidene Fluoride. Applied Sciences. 2021; 11(3):1166. https://doi.org/10.3390/app11031166
Chicago/Turabian StyleLiu, Qiang, Qiang Li, Zhifei Fang, Xiaoqin Zhou, Rongqi Wang, and Chengming Zuo. 2021. "Piezoelectric Energy Harvesting for Flapping Wing Micro Air Vehicle and Flapping Wing Sensing Based on Flexible Polyvinylidene Fluoride" Applied Sciences 11, no. 3: 1166. https://doi.org/10.3390/app11031166
APA StyleLiu, Q., Li, Q., Fang, Z., Zhou, X., Wang, R., & Zuo, C. (2021). Piezoelectric Energy Harvesting for Flapping Wing Micro Air Vehicle and Flapping Wing Sensing Based on Flexible Polyvinylidene Fluoride. Applied Sciences, 11(3), 1166. https://doi.org/10.3390/app11031166