
Model-Validation and Implementation of a Path-Following Algorithm in an Autonomous Underwater Vehicle †



Abstract
:1. Introduction
2. AUV Modeling and Simulation
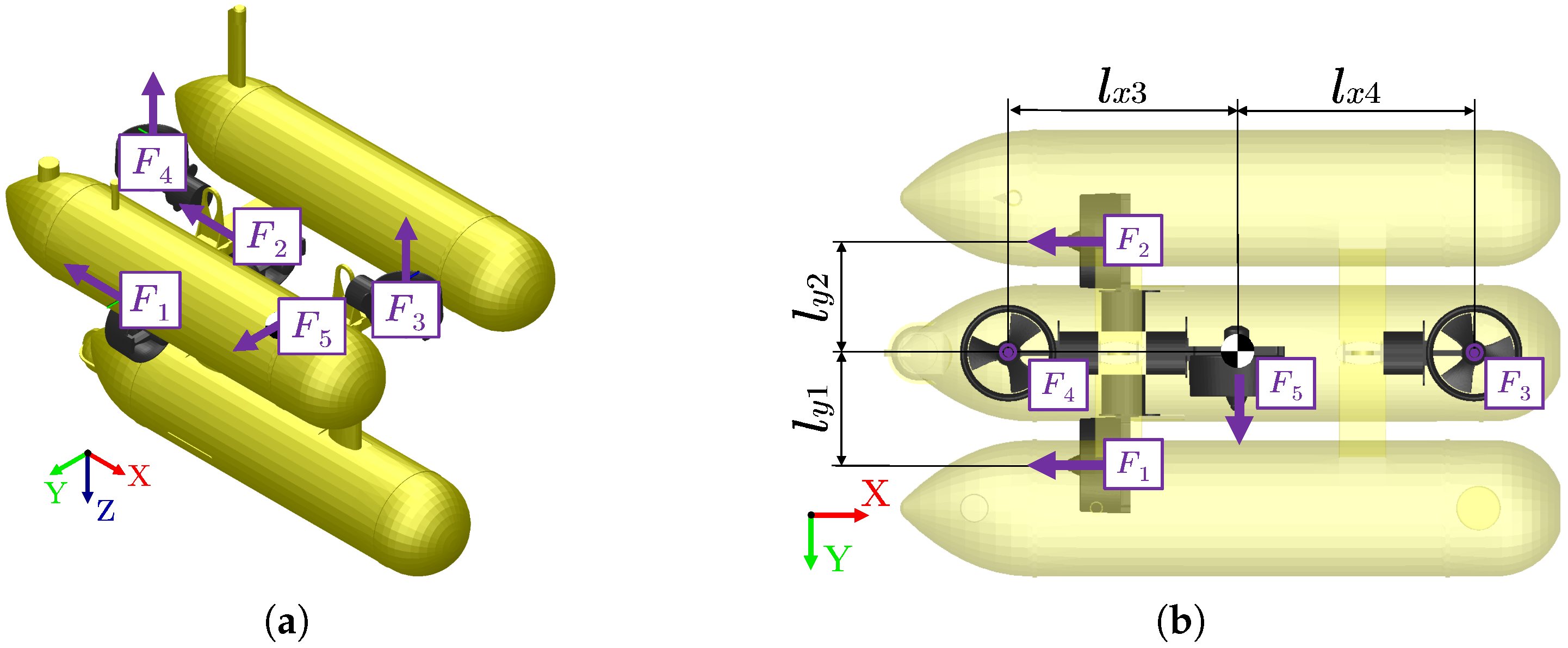
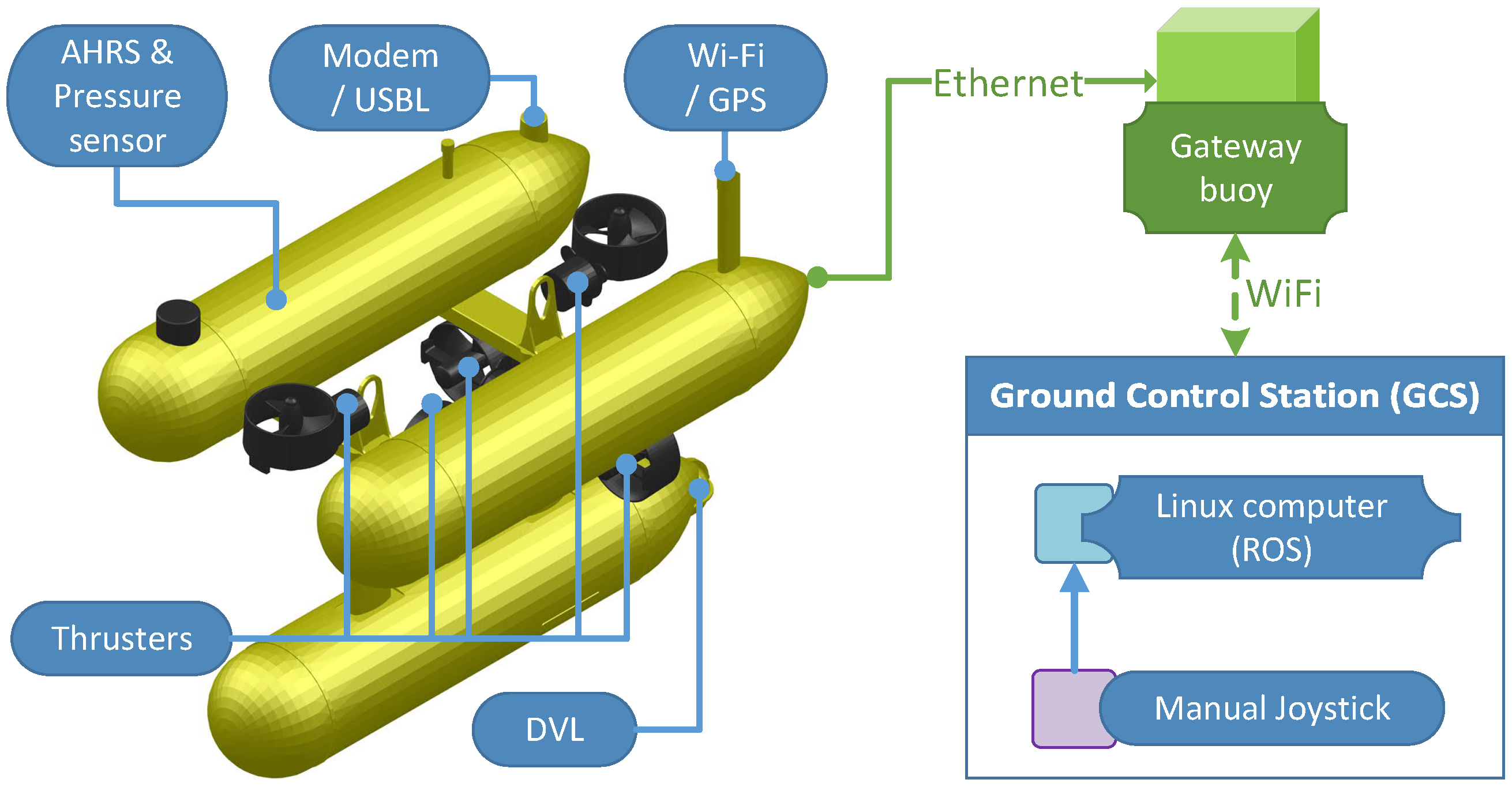
2.1. Overview of Girona500 AUV
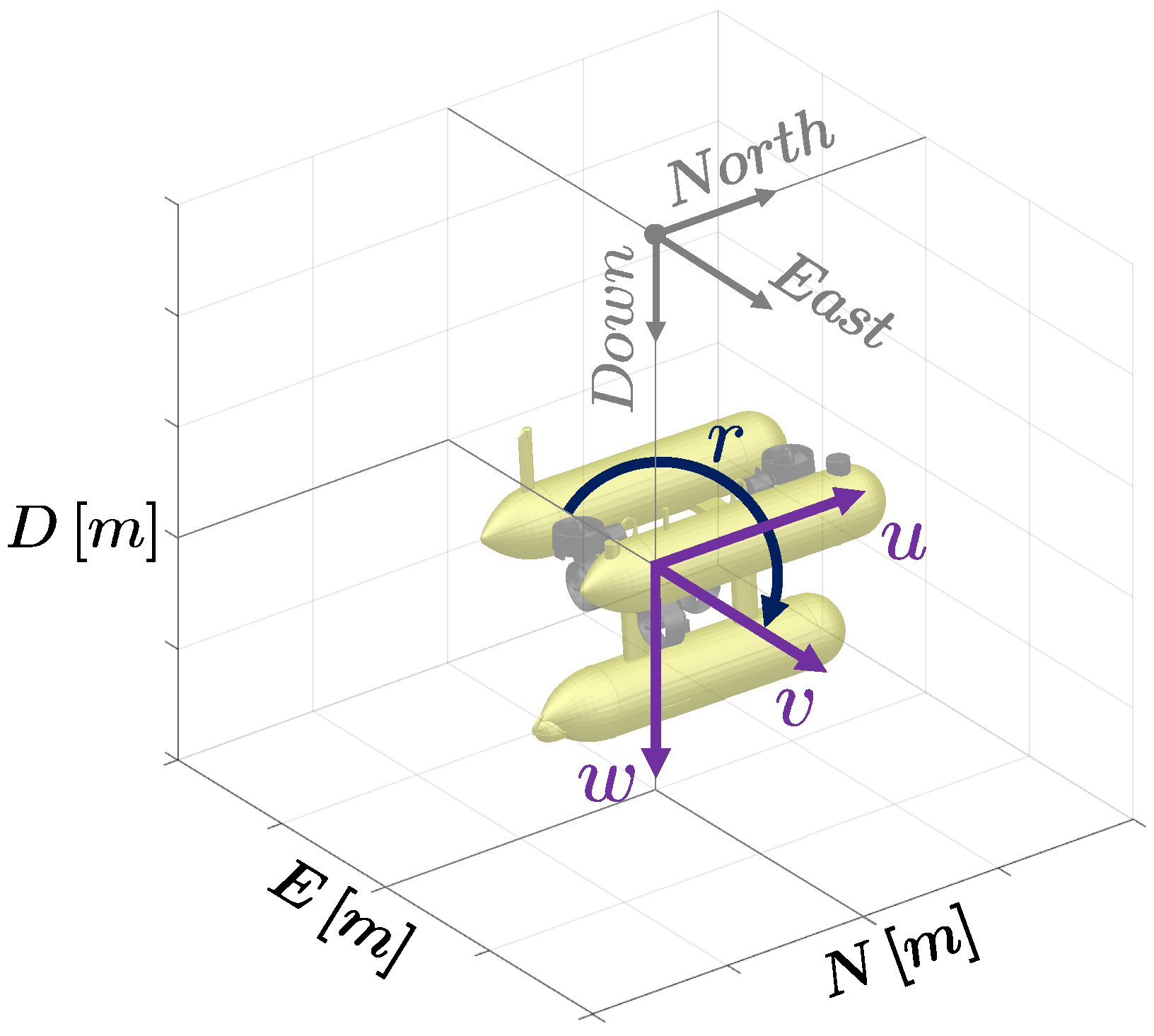
- indicate to the NED positions in earth-fixed coordinates,
- define the Euler angles in earth-fixed coordinates,
- are the linear velocities based on the body-fixed reference frame,
- denote the angular velocities based on the body-fixed reference frame.
2.2. AUV Modeling
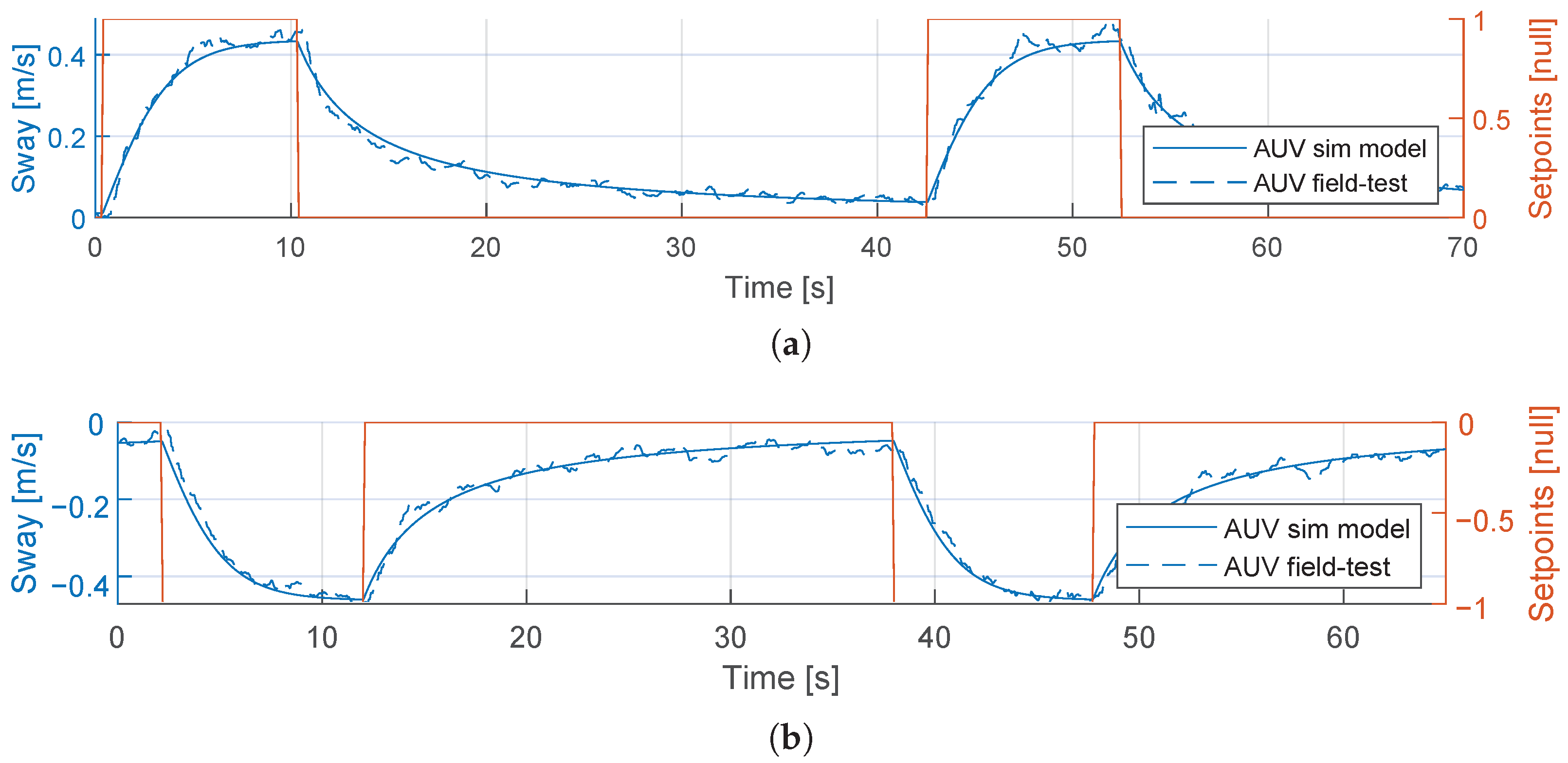
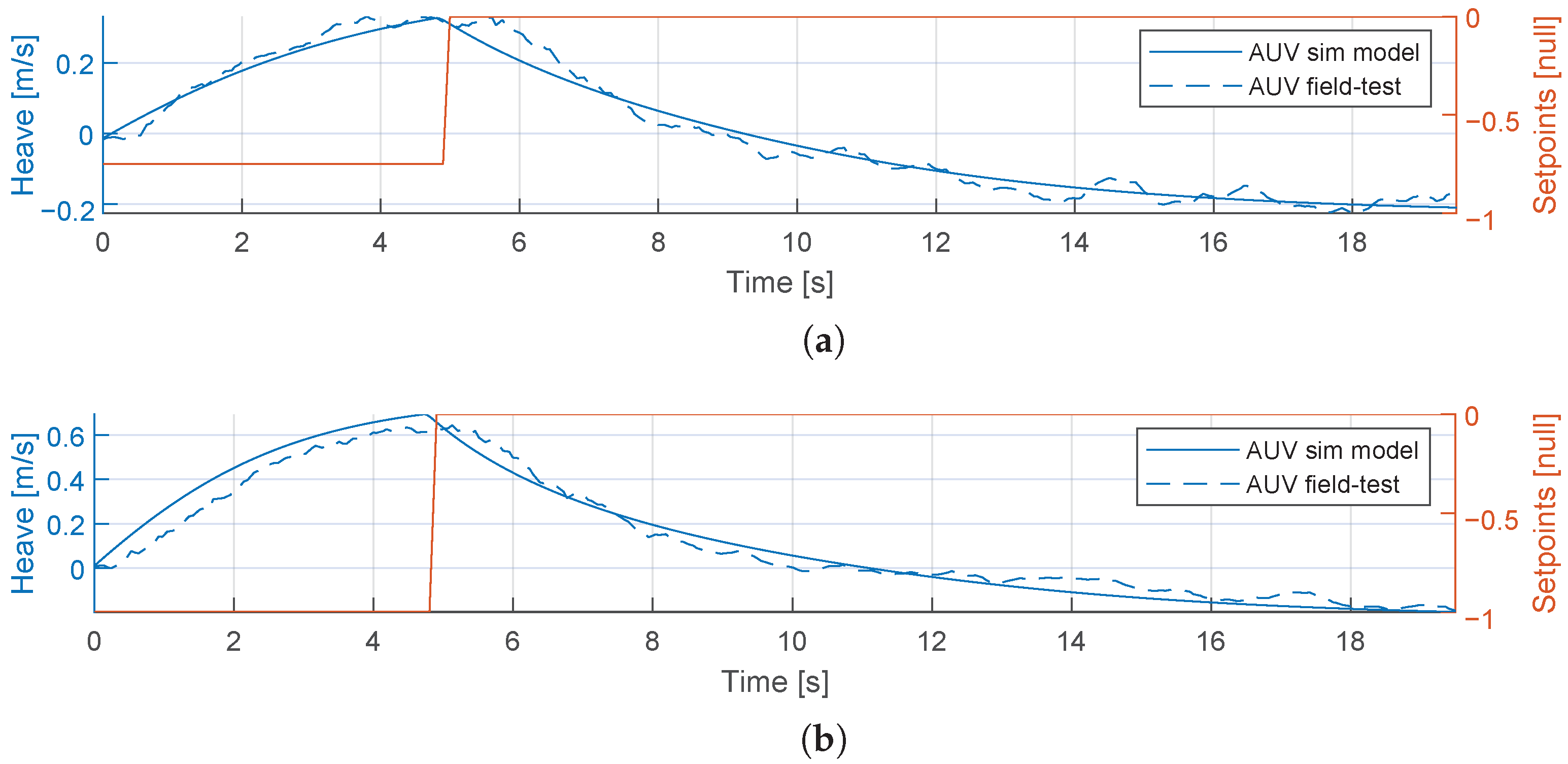
2.3. Model-Validation Using Parameter Estimation
3. GNC System with LOS-Based Model
3.1. AUV Guidance System
3.2. AUV Control System
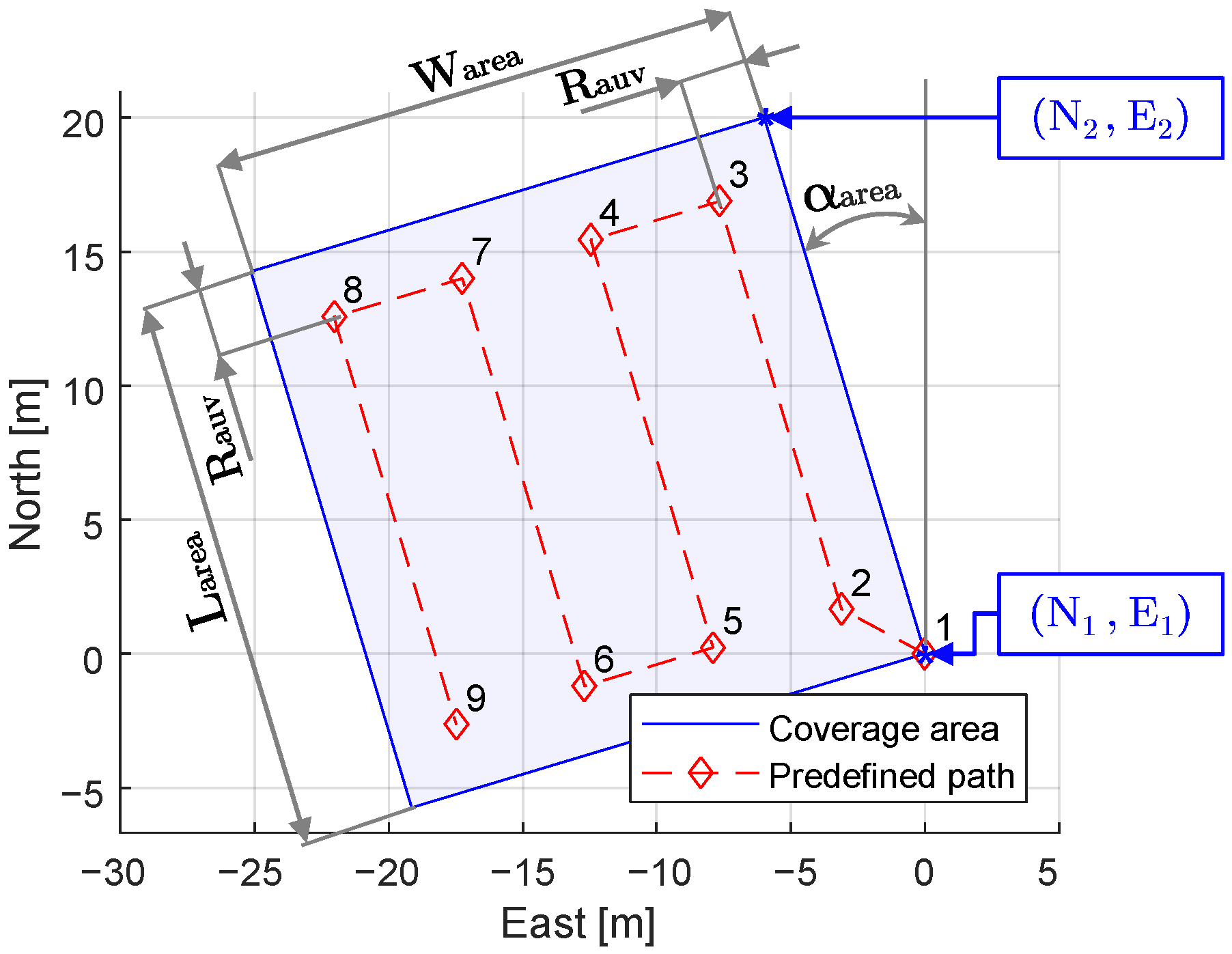
3.3. Coverage Path for the Path-Following Algorithm
3.4. Modular System for the Path-Following Algorithm
4. Experimental Validation
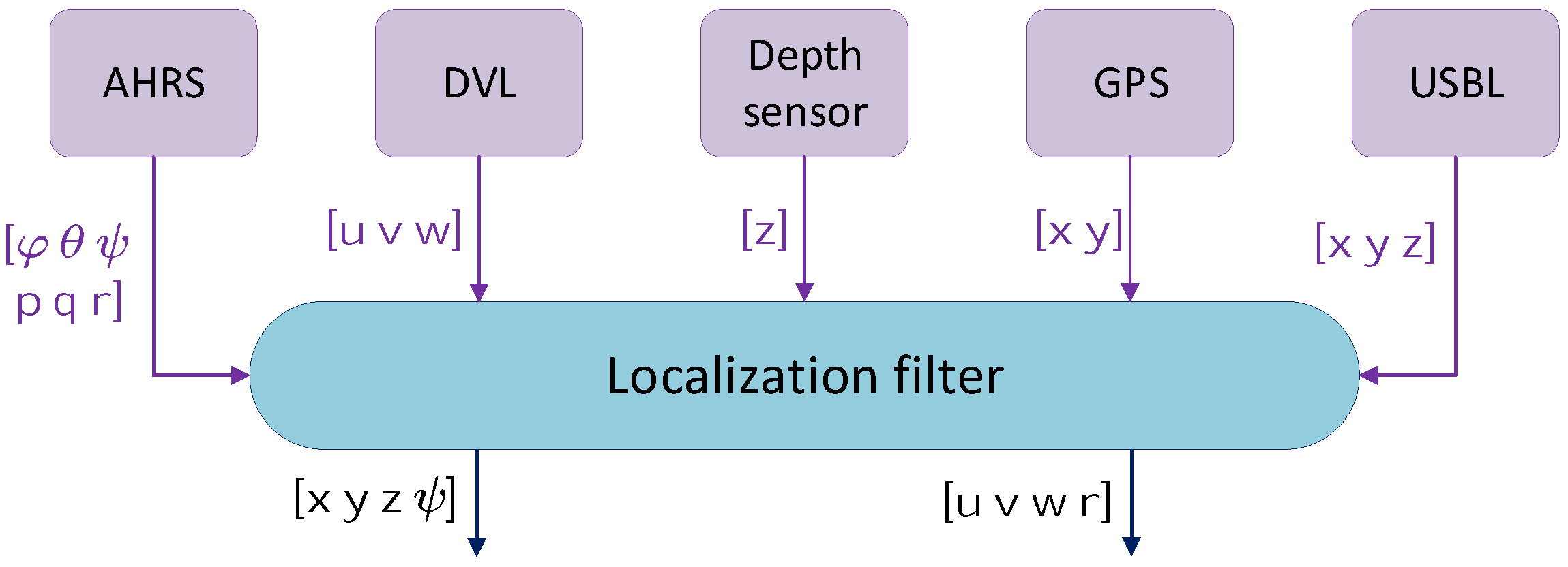
4.1. System Implementation
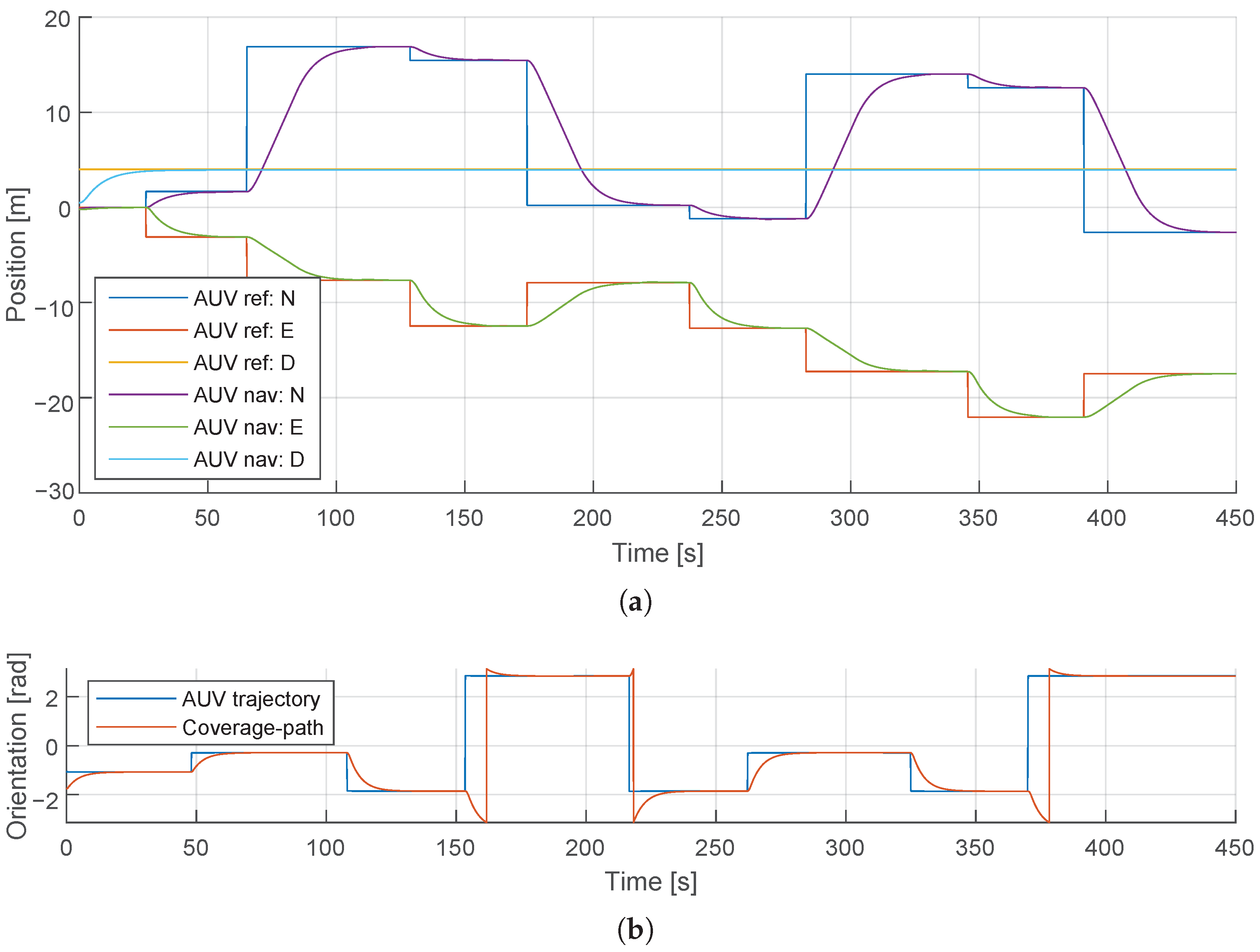
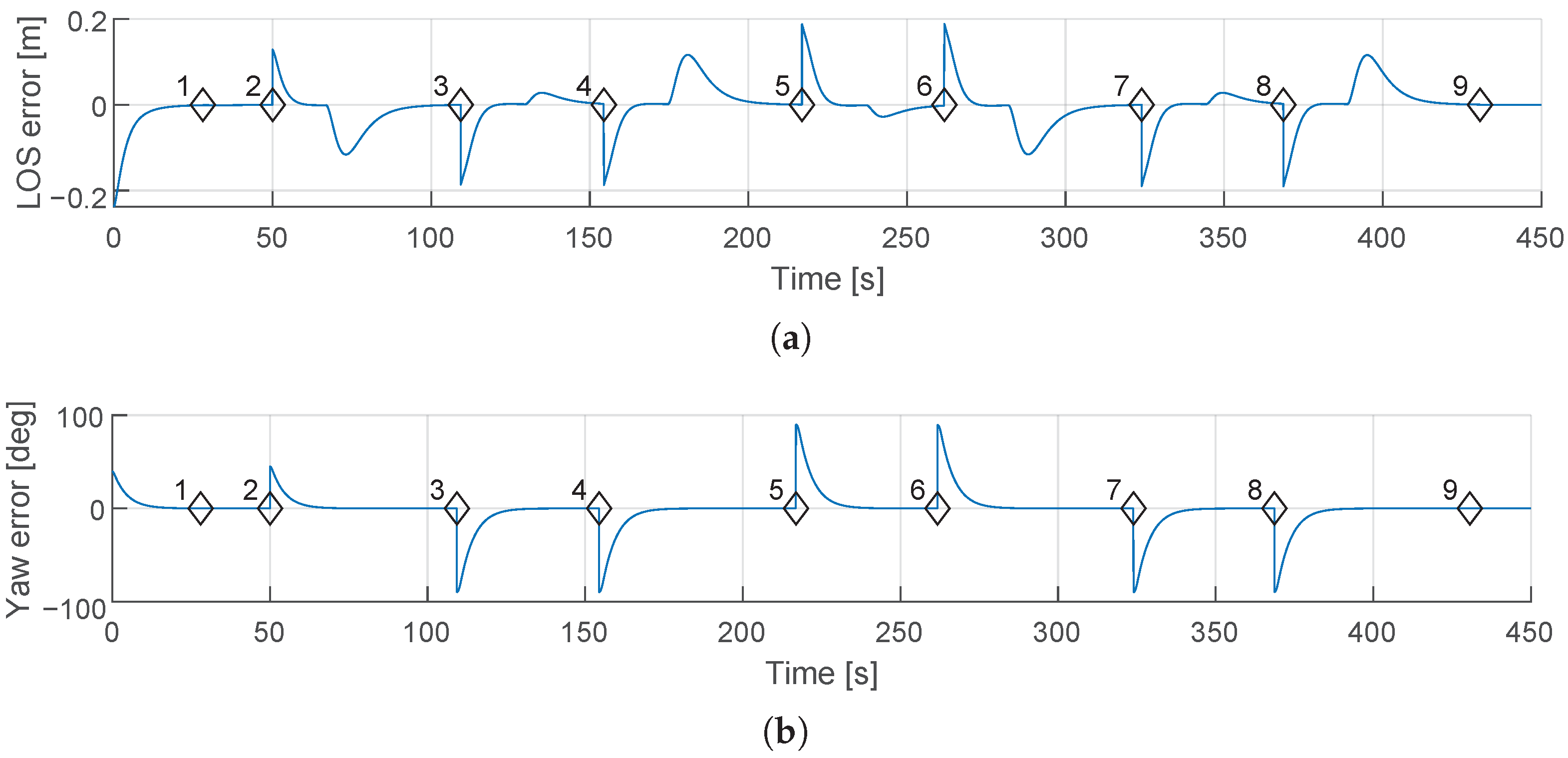
4.2. Simulation Results: Control Scenario I
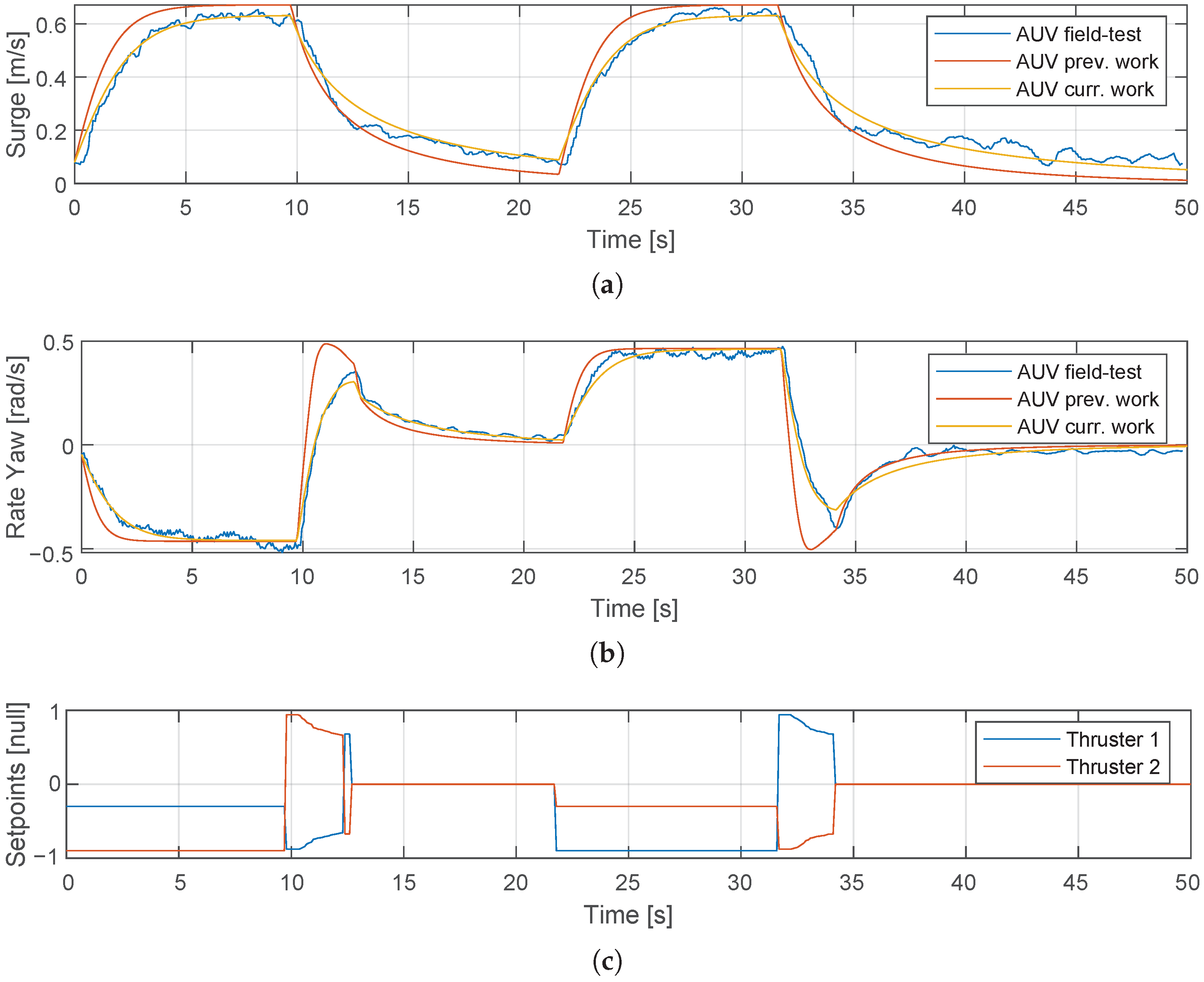
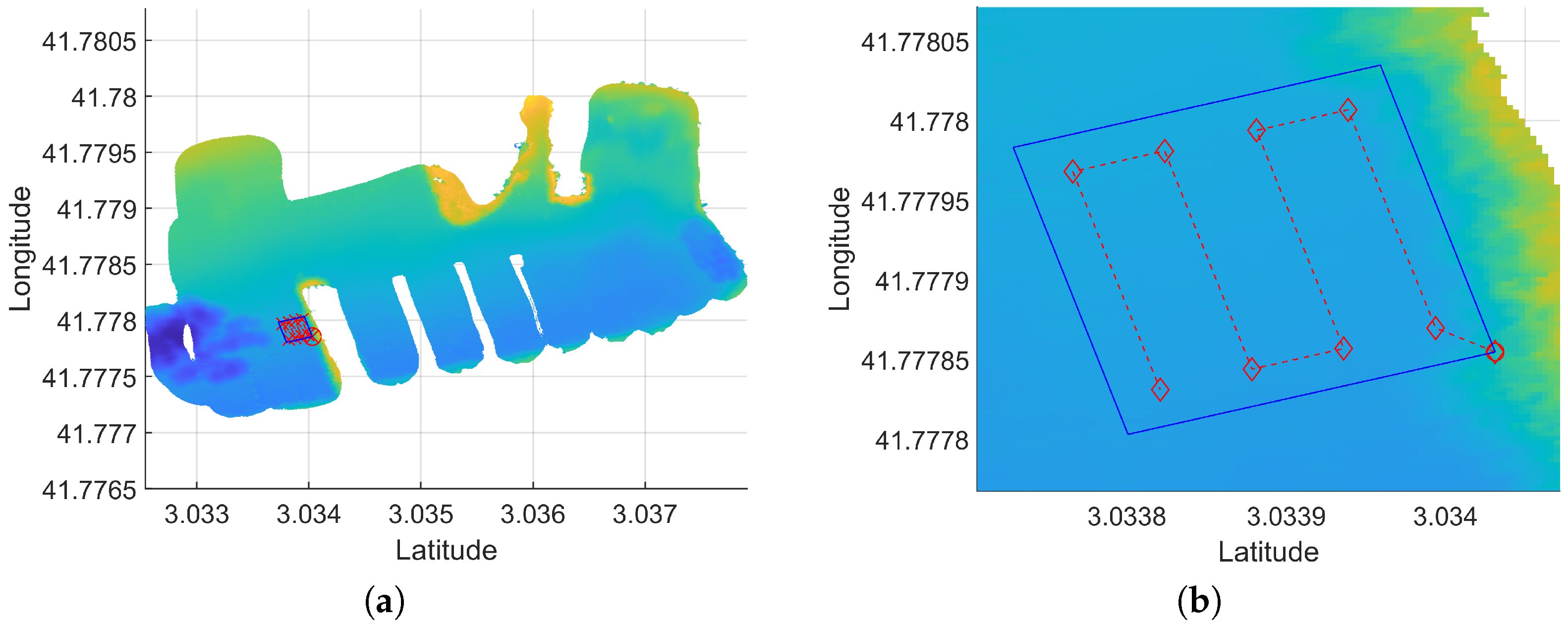
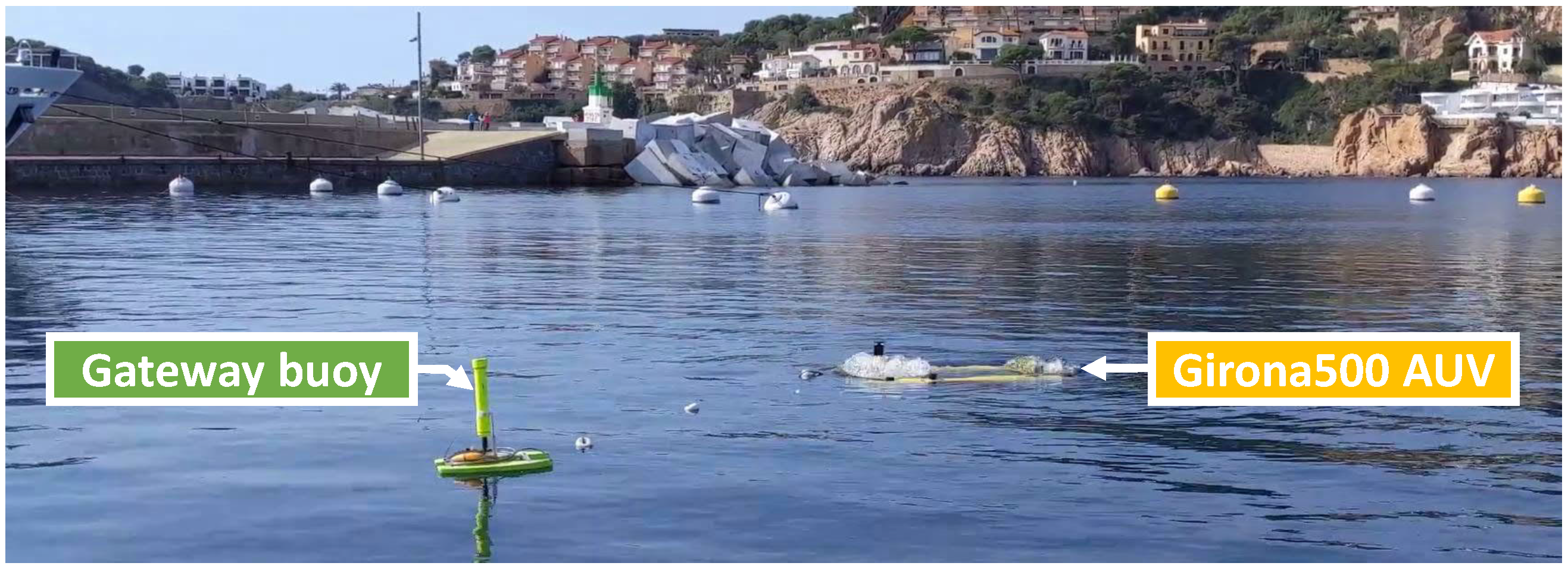
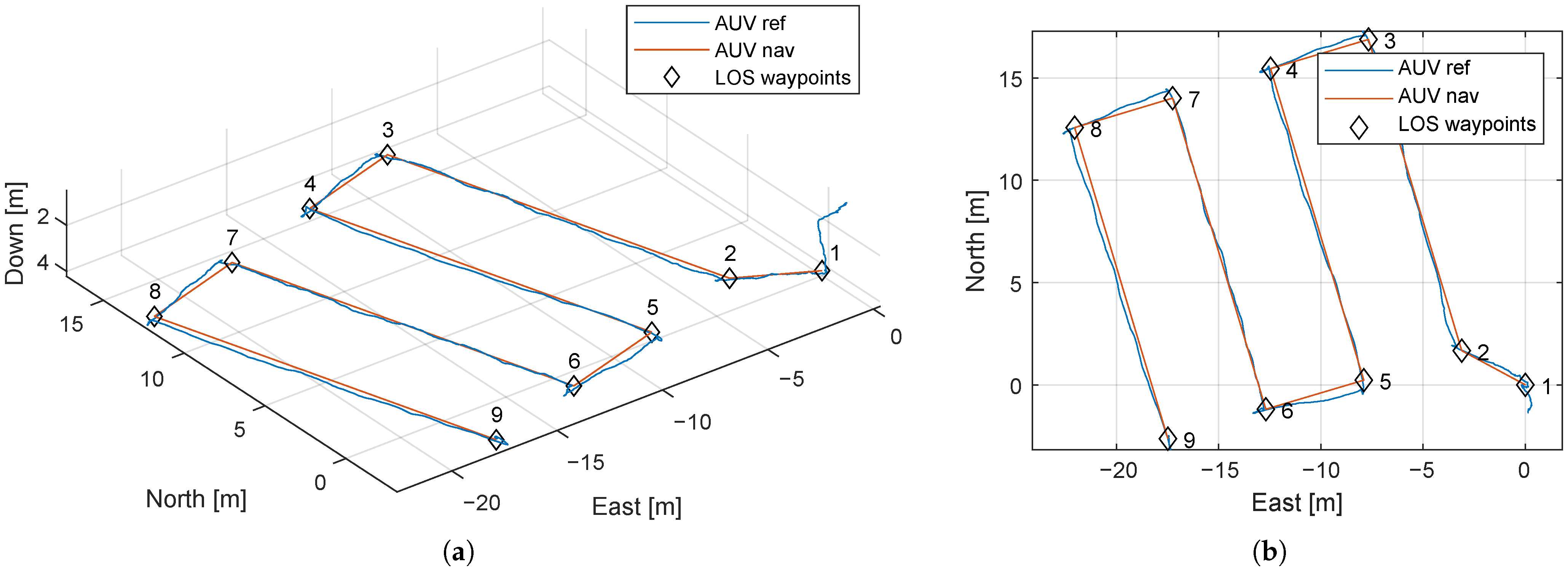
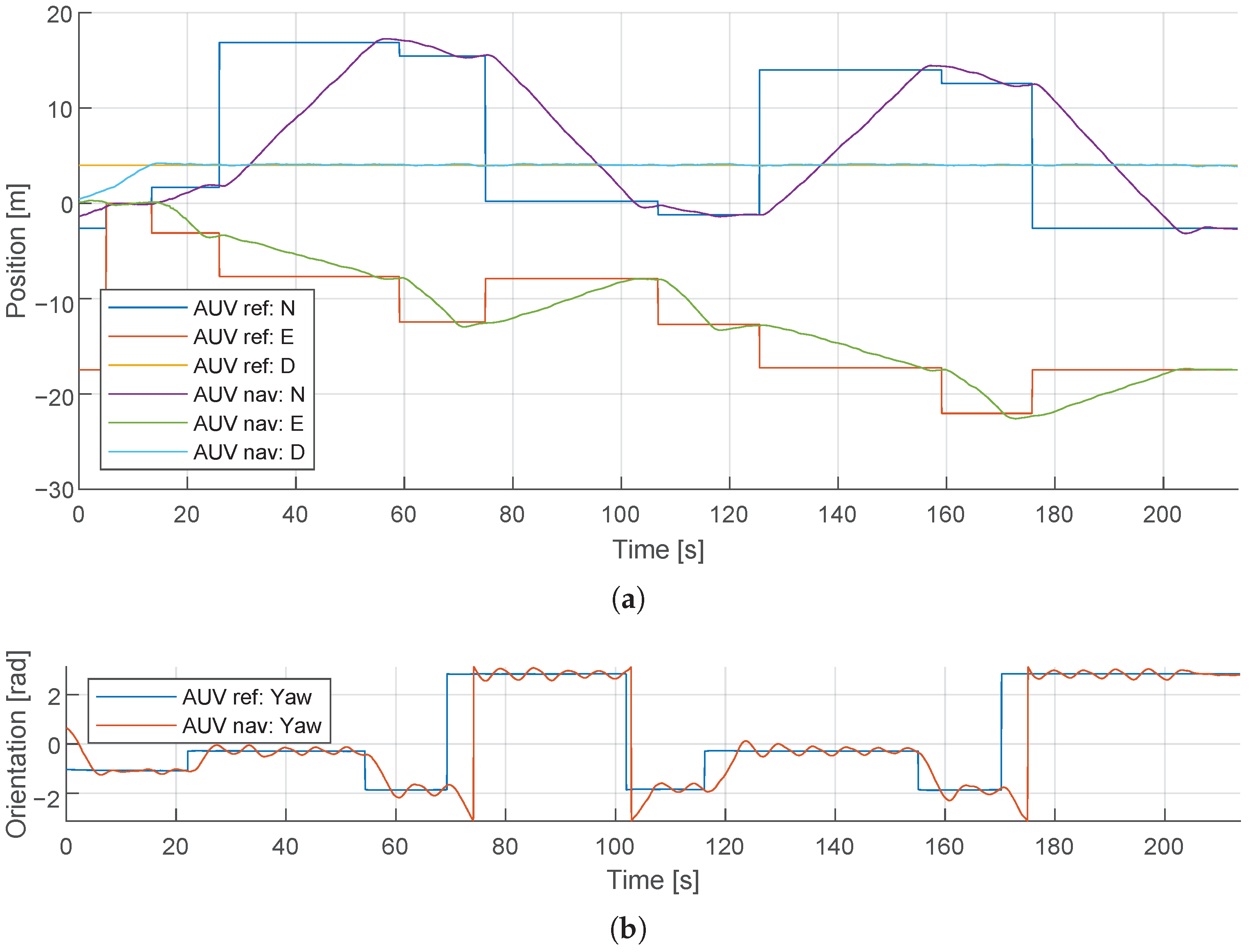
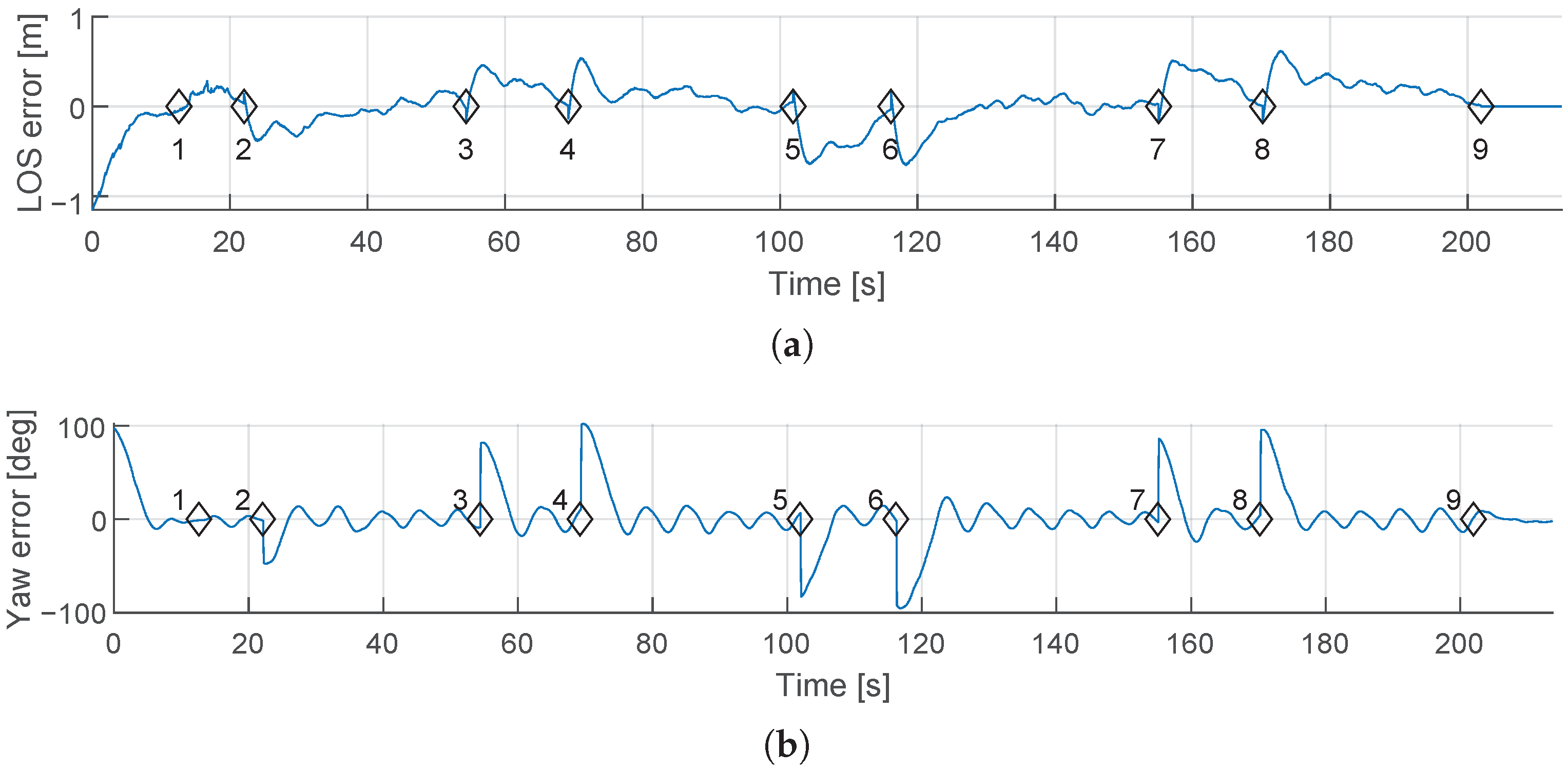
4.3. Experimental Results: Control Scenario II
5. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Fossen, T.; Ross, A. Nonlinear modelling, identification and control of UUVs. IEE Control Eng. Ser. 2006, 69, 13. [Google Scholar]
- Gertler, M. The DTMB Planar-Motion-Mechanism System; David W. Taylor Naval Ship Research and Development Center: Washington, DC, USA, 1967. [Google Scholar]
- Comstock, J.P. Principles of Naval Architecture; Society of Naval Architects and Marine Engineers: Jersey City, NJ, USA, 1967. [Google Scholar]
- Kepler, M.E.; Pawar, S.; Stilwell, D.J.; Brizzolara, S.; Neu, W.L. Assessment of AUV Hydrodynamic Coefficients from Analytic and Semi-Empirical Methods. In Proceedings of the OCEANS 2018 MTS/IEEE Charleston, Charleston, SC, USA, 22–25 October 2018; pp. 1–9. [Google Scholar]
- Beck, J.V.; Arnold, K.J. Parameter Estimation in Engineering and Science; John Wiley & Sons: Hoboken, NJ, USA, 1977. [Google Scholar]
- Ljung, L. System identification. In Signal Analysis and Prediction; Birkhäuser: Boston, MA, USA, 1999; pp. 163–173. [Google Scholar]
- Kim, J.; Kim, K.; Choi, H.S.; Seong, W.; Lee, K.Y. Estimation of hydrodynamic coefficients for an AUV using nonlinear observers. IEEE J. Ocean. Eng. 2002, 27, 830–840. [Google Scholar]
- Cardenas, P.; de Barros, E.A. Estimation of AUV hydrodynamic coefficients using analytical and system identification approaches. IEEE J. Ocean. Eng. 2019, 45, 1157–1176. [Google Scholar] [CrossRef]
- The MathWorks, Inc. Simulink Design Optimization User’s Guide; The MathWorks, Inc.: Natick, MA, USA, 2009; Release 2020a. [Google Scholar]
- The MathWorks, Inc. System Identification Toolbox User’s Guide; The MathWorks, Inc.: Natick, MA, USA, 1988; Release 2020a. [Google Scholar]
- Villa, J.; Aaltonen, J.; Koskinen, K.T. Path-Following with LiDAR-based Obstacle Avoidance of an Unmanned Surface Vehicle in Harbor Conditions. IEEE/ASME Trans. Mechatron. 2020, 25, 1812–1820. [Google Scholar] [CrossRef]
- Villa, J.; Aaltonen, J.; Virta, S.; Koskinen, K.T. A Co-Operative Autonomous Offshore System for Target Detection Using Multi-Sensor Technology. Remote Sens. 2020, 12, 4106. [Google Scholar] [CrossRef]
- Fnadi, M.; Plumet, F.; Benamar, F. Nonlinear tire cornering stiffness observer for a double steering off-road mobile robot. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 7529–7534. [Google Scholar]
- Tang, S.; Ura, T.; Nakatani, T.; Thornton, B.; Jiang, T. Estimation of the hydrodynamic coefficients of the complex-shaped autonomous underwater vehicle TUNA-SAND. J. Mar. Sci. Technol. 2009, 14, 373–386. [Google Scholar] [CrossRef]
- Pan, Y.; Zhang, H.; Zhou, Q. Numerical prediction of submarine hydrodynamic coefficients using CFD simulation. J. Hydrodyn. 2012, 24, 840–847. [Google Scholar] [CrossRef]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Fossen, T.I.; Pettersen, K.Y. On uniform semiglobal exponential stability (USGES) of proportional line-of-sight guidance laws. Automatica 2014, 50, 2912–2917. [Google Scholar] [CrossRef] [Green Version]
- Fossen, T.I.; Pettersen, K.Y.; Galeazzi, R. Line-of-sight path following for dubins paths with adaptive sideslip compensation of drift forces. IEEE Trans. Control Syst. Technol. 2014, 23, 820–827. [Google Scholar] [CrossRef] [Green Version]
- Moe, S.; Pettersen, K.Y.; Fossen, T.I.; Gravdahl, J.T. Line-of-sight curved path following for underactuated USVs and AUVs in the horizontal plane under the influence of ocean currents. In Proceedings of the 2016 24th Mediterranean Conference on Control and Automation (MED), Athens, Greece, 21–24 June 2016; pp. 38–45. [Google Scholar]
- Rout, R.; Subudhi, B. NARMAX self-tuning controller for line-of-sight-based waypoint tracking for an autonomous underwater vehicle. IEEE Trans. Control Syst. Technol. 2016, 25, 1529–1536. [Google Scholar] [CrossRef]
- Shen, C.; Shi, Y.; Buckham, B. Integrated path planning and tracking control of an AUV: A unified receding horizon optimization approach. IEEE/ASME Trans. Mechatron. 2016, 22, 1163–1173. [Google Scholar] [CrossRef]
- Liang, X.; Qu, X.; Wan, L.; Ma, Q. Three-dimensional path following of an underactuated AUV based on fuzzy backstepping sliding mode control. Int. J. Fuzzy Syst. 2018, 20, 640–649. [Google Scholar] [CrossRef]
- Galceran, E.; Carreras, M. A survey on coverage path planning for robotics. Robot. Auton. Syst. 2013, 61, 1258–1276. [Google Scholar] [CrossRef] [Green Version]
- Choset, H.; Pignon, P. Coverage path planning: The boustrophedon cellular decomposition. In Field and Service Robotics; Springer: London, UK, 1998; pp. 203–209. [Google Scholar]
- Vidal, E.; Palomeras, N.; Carreras, M. Online 3D underwater exploration and coverage. In Proceedings of the 2018 IEEE/OES Autonomous Underwater Vehicle Workshop (AUV), Porto, Portugal, 6–9 November 2018; pp. 1–5. [Google Scholar]
- Hert, S.; Tiwari, S.; Lumelsky, V. A terrain-covering algorithm for an AUV. In Underwater Robots; Springer: Boston, MA, USA, 1996; pp. 17–45. [Google Scholar]
- Galceran, E.; Campos, R.; Palomeras, N.; Ribas, D.; Carreras, M.; Ridao, P. Coverage path planning with real-time replanning and surface reconstruction for inspection of three-dimensional underwater structures using autonomous underwater vehicles. J. Field Robot. 2015, 32, 952–983. [Google Scholar] [CrossRef] [Green Version]
- Villa, J.; Vallicrosa, G.; Aaltonen, J.; Ridao, P.; Koskinen, K.T. Model-based Guidance, Navigation and Control architecture for an Autonomous Underwater Vehicle. In Proceedings of the Global Oceans 2020: Singapore–US Gulf Coast, Biloxi, MS, USA, 5–30 October 2020; pp. 1–6. [Google Scholar]
- Ribas, D.; Palomeras, N.; Ridao, P.; Carreras, M.; Mallios, A. Girona 500 auv: From survey to intervention. IEEE/ASME Trans. Mechatron. 2011, 17, 46–53. [Google Scholar] [CrossRef]
- Quigley, M.; Conley, K.; Gerkey, B.; Faust, J.; Foote, T.; Leibs, J.; Wheeler, R.; Ng, A.Y. ROS: An open-source Robot Operating System. In Proceedings of the ICRA Workshop on Open Source Software; Kobe, Japan, 2009; Volume 3, p. 5. Available online: http://robotics.stanford.edu/~ang/papers/icraoss09-ROS.pdf (accessed on 1 December 2021).
- Iqua Robotics. COLA2 Wiki. Available online: https://bitbucket.org/iquarobotics/cola2_wiki/src/master/README.md (accessed on 1 December 2021).
- Palomeras, N.; Carrera, A.; Hurtós, N.; Karras, G.C.; Bechlioulis, C.P.; Cashmore, M.; Magazzeni, D.; Long, D.; Fox, M.; Kyriakopoulos, K.J.; et al. Toward persistent autonomous intervention in a subsea panel. Auton. Robot. 2016, 40, 1279–1306. [Google Scholar] [CrossRef]
- Sagatun, S.I.; Fossen, T.I. Lagrangian formulation of underwater vehicles’ dynamics. In Proceedings of the Conference Proceedings 1991 IEEE International Conference on Systems, Man, and Cybernetics, Charlottesville, VA, USA, 13–16 October 1991; pp. 1029–1034. [Google Scholar]
- Fossen, T.I. Guidance and Control of Ocean Vehicles. Doctor’s Thesis, University of Trondheim, Trondheim, Norway, 1999.
- Antonelli, G.; Antonelli, G. Underwater Robots; Springer International Publishing: Cham, Switzerland, 2014; Volume 3. [Google Scholar]
- Iqua Robotics. COLA2 Simulation. Available online: https://bitbucket.org/iquarobotics/cola2_wiki/src/master/cola2_sim.md (accessed on 1 December 2021).
- Healey, A.J.; Lienard, D. Multivariable sliding mode control for autonomous diving and steering of unmanned underwater vehicles. IEEE J. Ocean. Eng. 1993, 18, 327–339. [Google Scholar] [CrossRef] [Green Version]
- The MathWorks, Inc. Simulink Control Design User’s Guide; The MathWorks, Inc.: Natick, MA, USA, 2004; Release 2020a. [Google Scholar]
- Lumelsky, V.J.; Mukhopadhyay, S.; Sun, K. Dynamic path planning in sensor-based terrain acquisition. IEEE Trans. Robot. Autom. 1990, 6, 462–472. [Google Scholar] [CrossRef]
- Acar, E.U.; Choset, H.; Rizzi, A.A.; Atkar, P.N.; Hull, D. Morse decompositions for coverage tasks. Int. J. Robot. Res. 2002, 21, 331–344. [Google Scholar] [CrossRef]
- The MathWorks, Inc. ROS Toolbox User’s Guide; The MathWorks, Inc.: Natick, MA, USA, 2019; Release 2020a. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| m | 180.00 |
| ∇ | 0.1837 |
| 40.70 | |
| 0.2432 | |
| 0.2432 |
| Parameter | Previous Work | Current Work |
|---|---|---|
| −40.0 | −21.750 | |
| −90.0 | −250.184 | |
| −163.0 | −216.423 | |
| −40.0 | −6.192 | |
| −90.0 | −580.969 | |
| −600.0 | −485.538 | |
| −40.0 | −92.657 | |
| −90.0 | −471.215 | |
| −600.0 | −189.788 | |
| −10.0 | −15.560 | |
| 0.0 | −44.297 | |
| −80.0 | −69.364 |
| Controller | |||
|---|---|---|---|
| North | 151.366 | 0.0106 | 1081.310 |
| East | 151.366 | 0.0106 | 1081.310 |
| Down | 151.366 | 0.0106 | 1081.310 |
| Yaw | 63.425 | 0.0037 | 271.85 |
| LOS | 0.0333 | 0.0 | 0.0 |
| Vehicle | RMSE | MAE | SD |
|---|---|---|---|
| Girona500 AUV | 0.2346 | 0.1525 | 0.2345 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Villa, J.; Vallicrosa, G.; Aaltonen, J.; Ridao, P.; Koskinen, K.T. Model-Validation and Implementation of a Path-Following Algorithm in an Autonomous Underwater Vehicle. Appl. Sci. 2021, 11, 11891. https://doi.org/10.3390/app112411891
Villa J, Vallicrosa G, Aaltonen J, Ridao P, Koskinen KT. Model-Validation and Implementation of a Path-Following Algorithm in an Autonomous Underwater Vehicle. Applied Sciences. 2021; 11(24):11891. https://doi.org/10.3390/app112411891
Chicago/Turabian StyleVilla, Jose, Guillem Vallicrosa, Jussi Aaltonen, Pere Ridao, and Kari T. Koskinen. 2021. "Model-Validation and Implementation of a Path-Following Algorithm in an Autonomous Underwater Vehicle" Applied Sciences 11, no. 24: 11891. https://doi.org/10.3390/app112411891
APA StyleVilla, J., Vallicrosa, G., Aaltonen, J., Ridao, P., & Koskinen, K. T. (2021). Model-Validation and Implementation of a Path-Following Algorithm in an Autonomous Underwater Vehicle. Applied Sciences, 11(24), 11891. https://doi.org/10.3390/app112411891