
Quadrotor Attitude Control by Fractional-Order Fuzzy Particle Swarm Optimization-Based Active Disturbance Rejection Control

Abstract
:1. Introduction
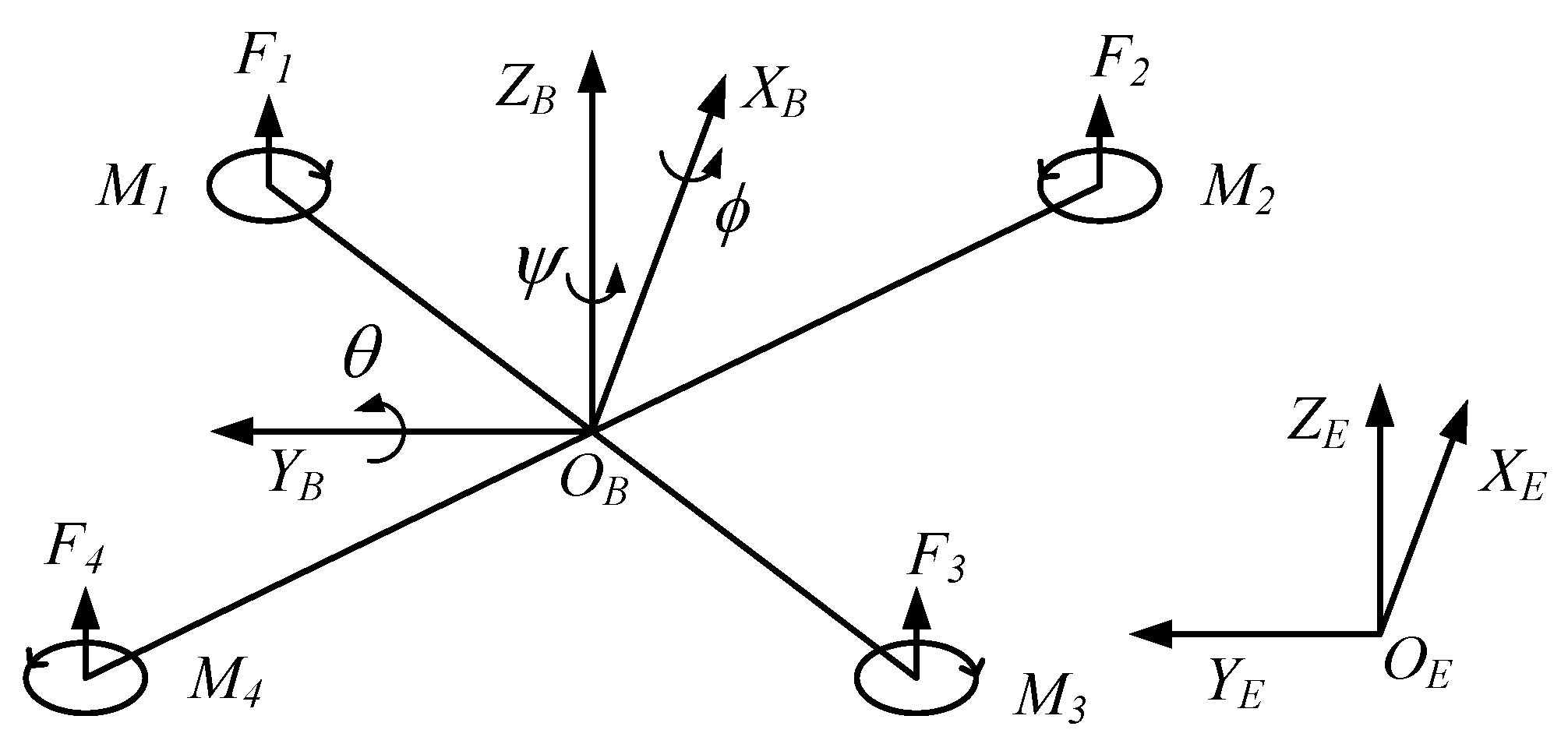
2. The Dynamic Model of Quadrotor Aircrafts
- The quadrotor aircraft is an ideal rigid body in flight, with constant mass and no deformation in any form;
- The mass of the quadrotor aircraft is uniformly and symmetrically distributed, and the origin of the body coordinate system always coincides with the center of gravity and center of mass of the aircraft;
- The aircraft flies at low speeds and small angles and ignores the influence of air resistance.
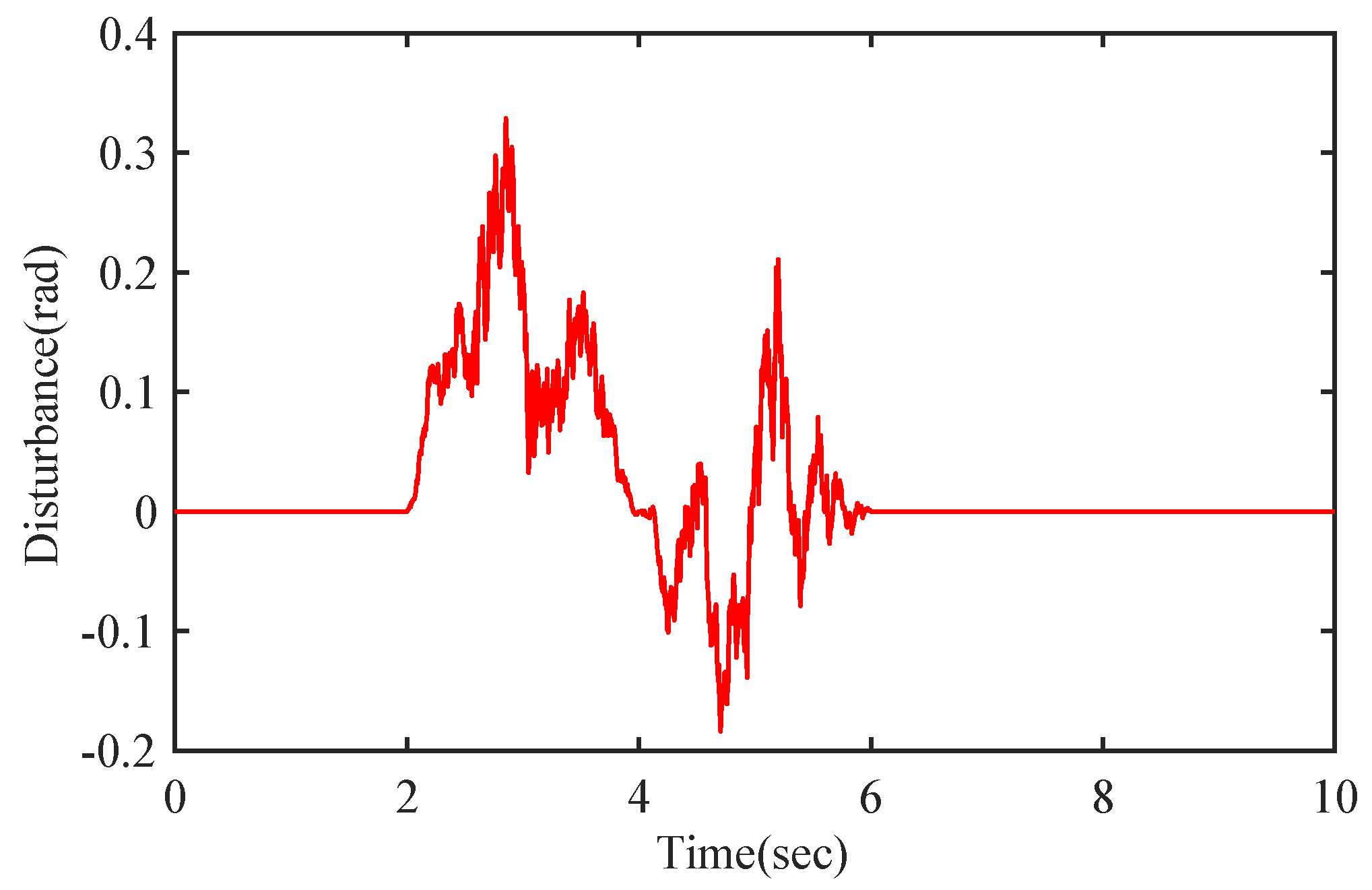
3. The Model of Turbulent Wind Field
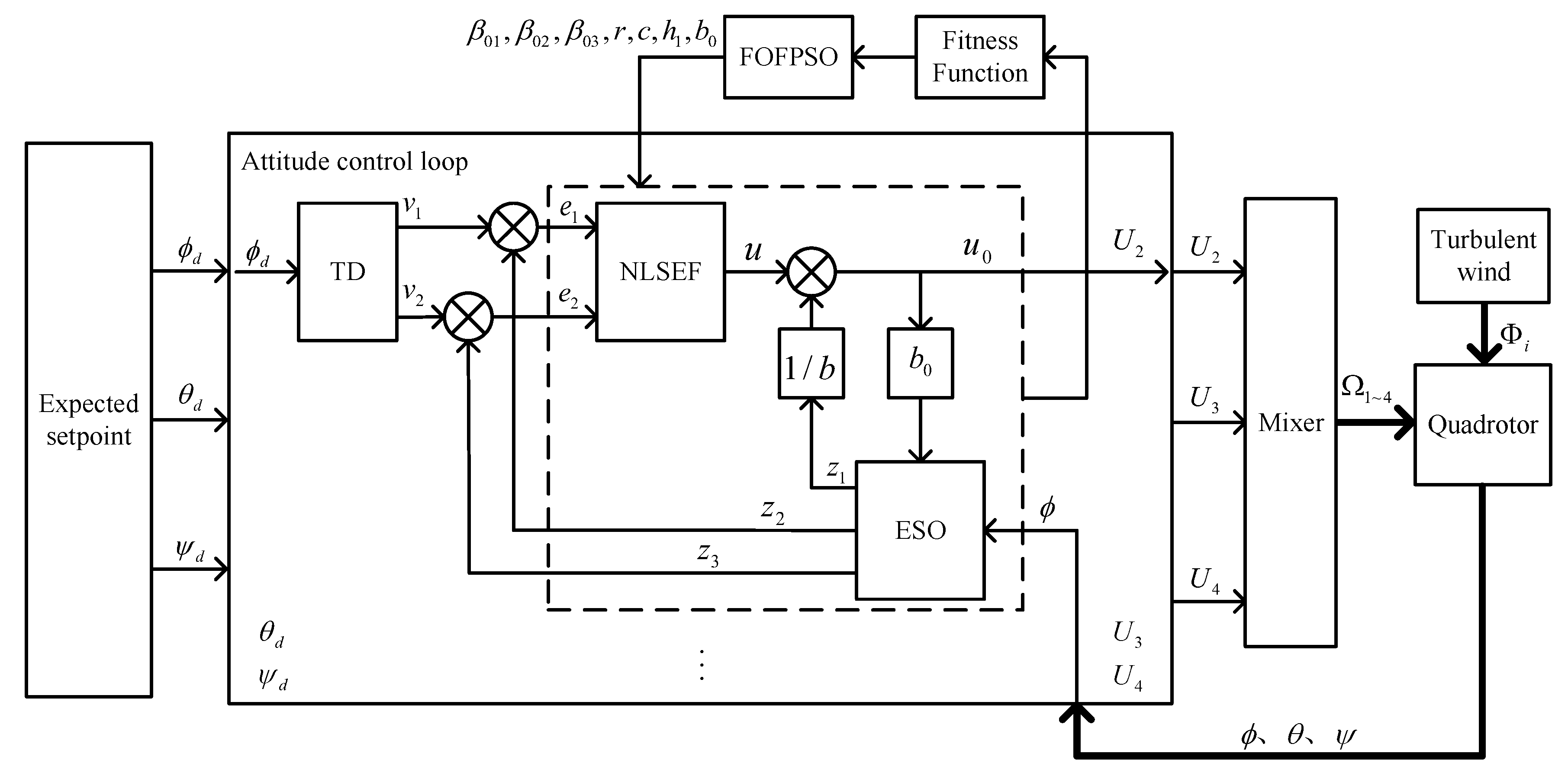
4. Design of Quadrotor Aircraft Control System Based on ADRC
4.1. Attitude Controller Structure
4.2. Tracking Differentiator (TD)
4.3. Extended State Observer (ESO)
4.4. Nonlinear State Error Feedback Control (NLSEF)
5. Particle Swarm Optimization Algorithm
5.1. Traditional Particle Swarm
5.2. Fitness Function
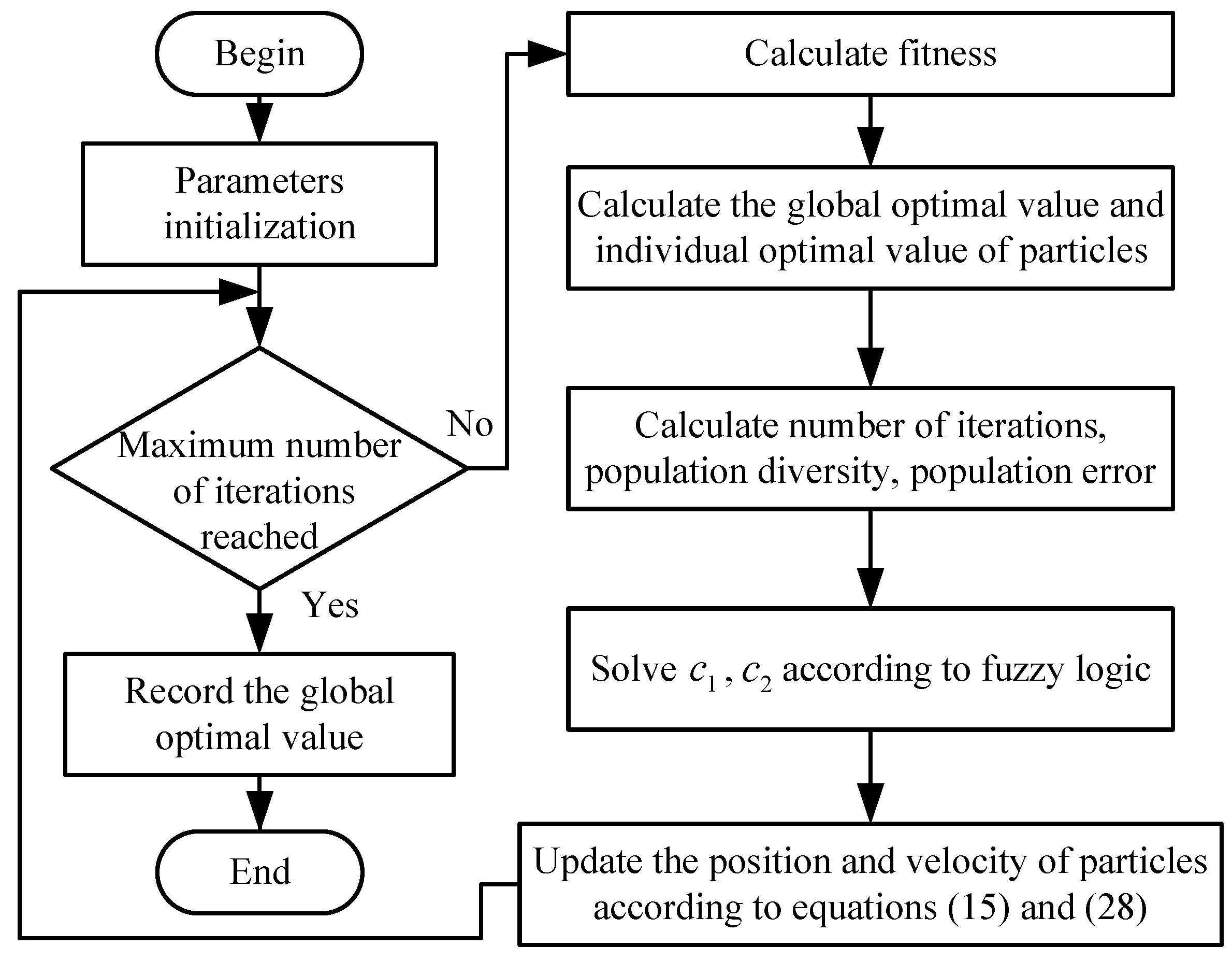
5.3. Improved Particle Swarm Optimization Algorithm
5.3.1. Fuzzy System
5.3.2. Fractional Order Particle Swarm Optimization
5.3.3. Fractional Order Fuzzy Particle Swarm
6. Experimental Analysis
6.1. Simulation Verification
6.1.1. Optimization Analysis of Controller Parameters
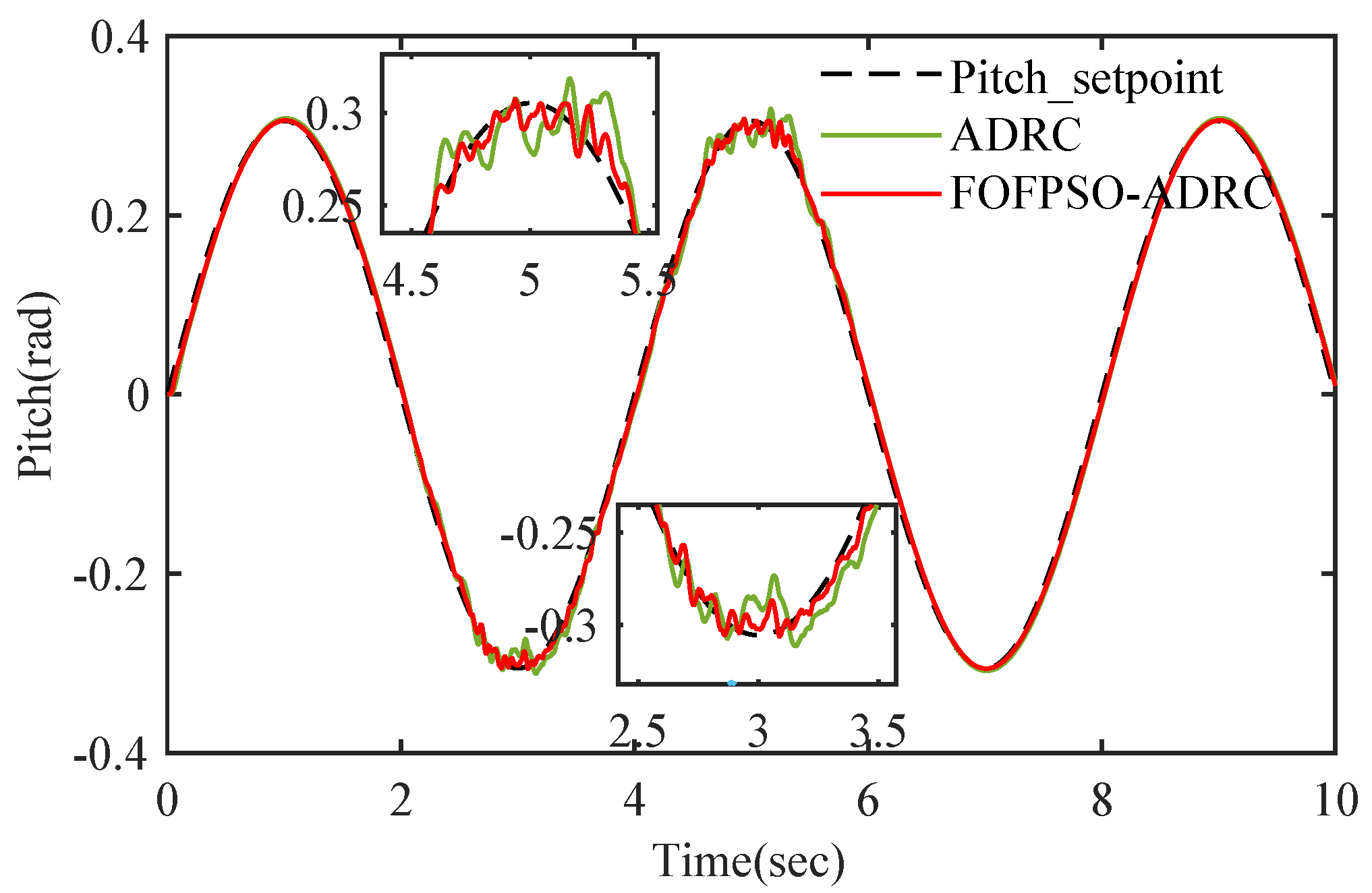
6.1.2. Controller Disturbance Rejection Performance Analysis
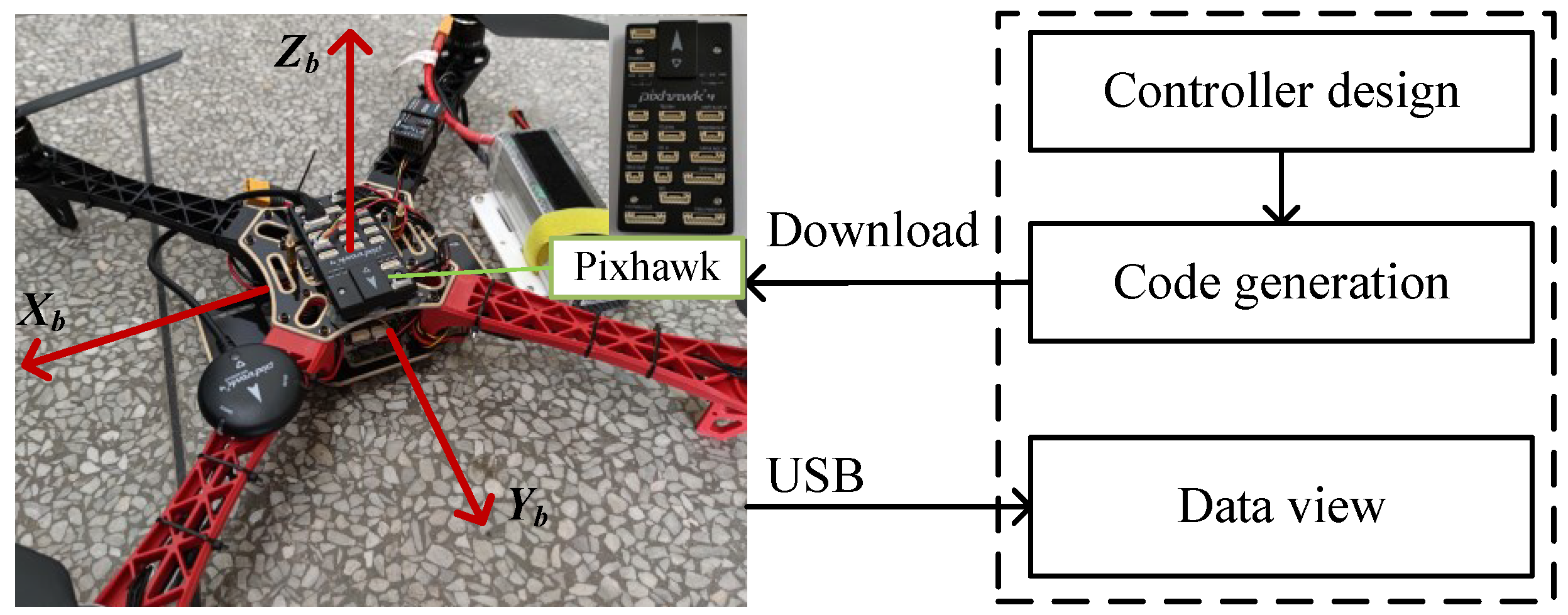
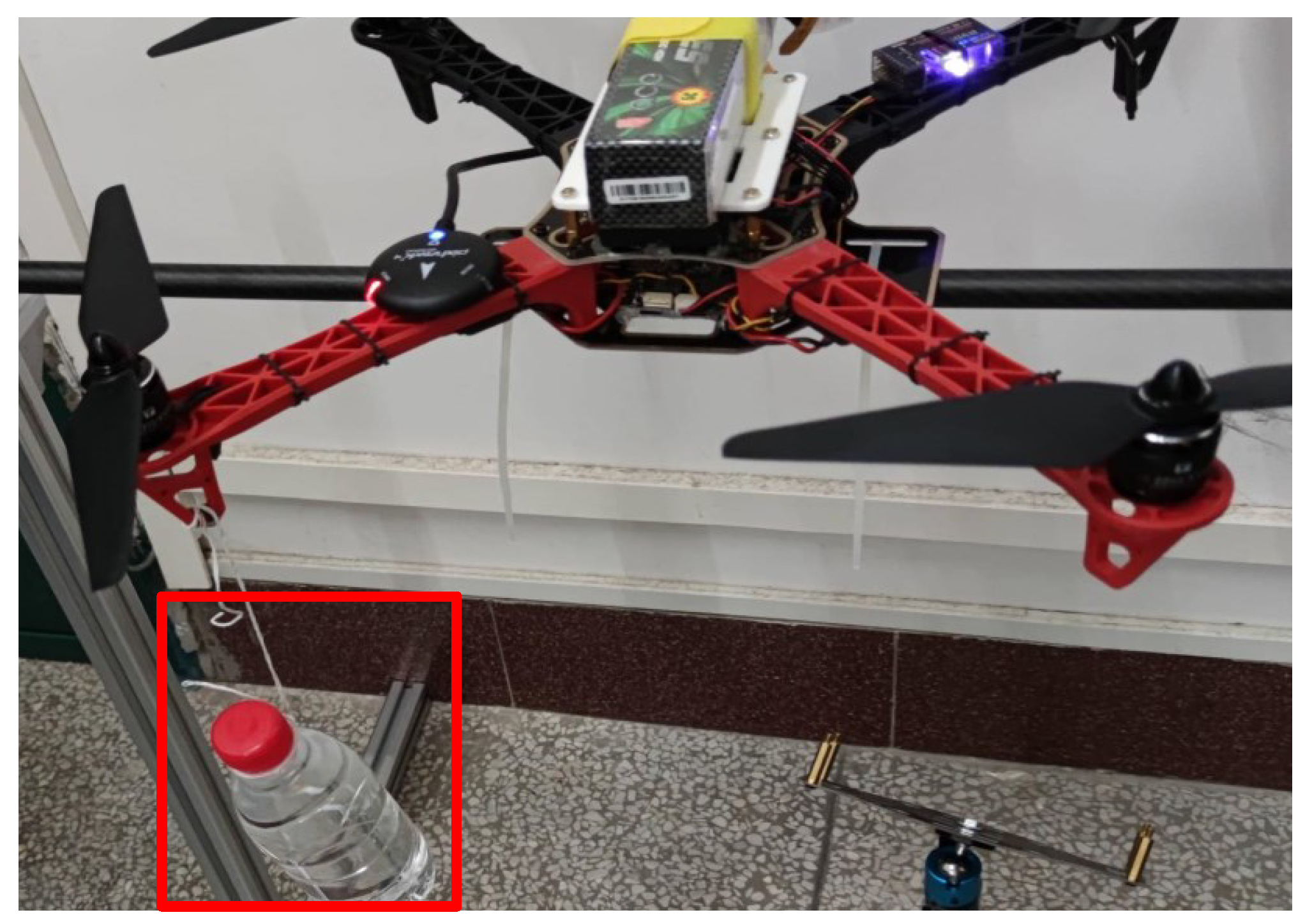
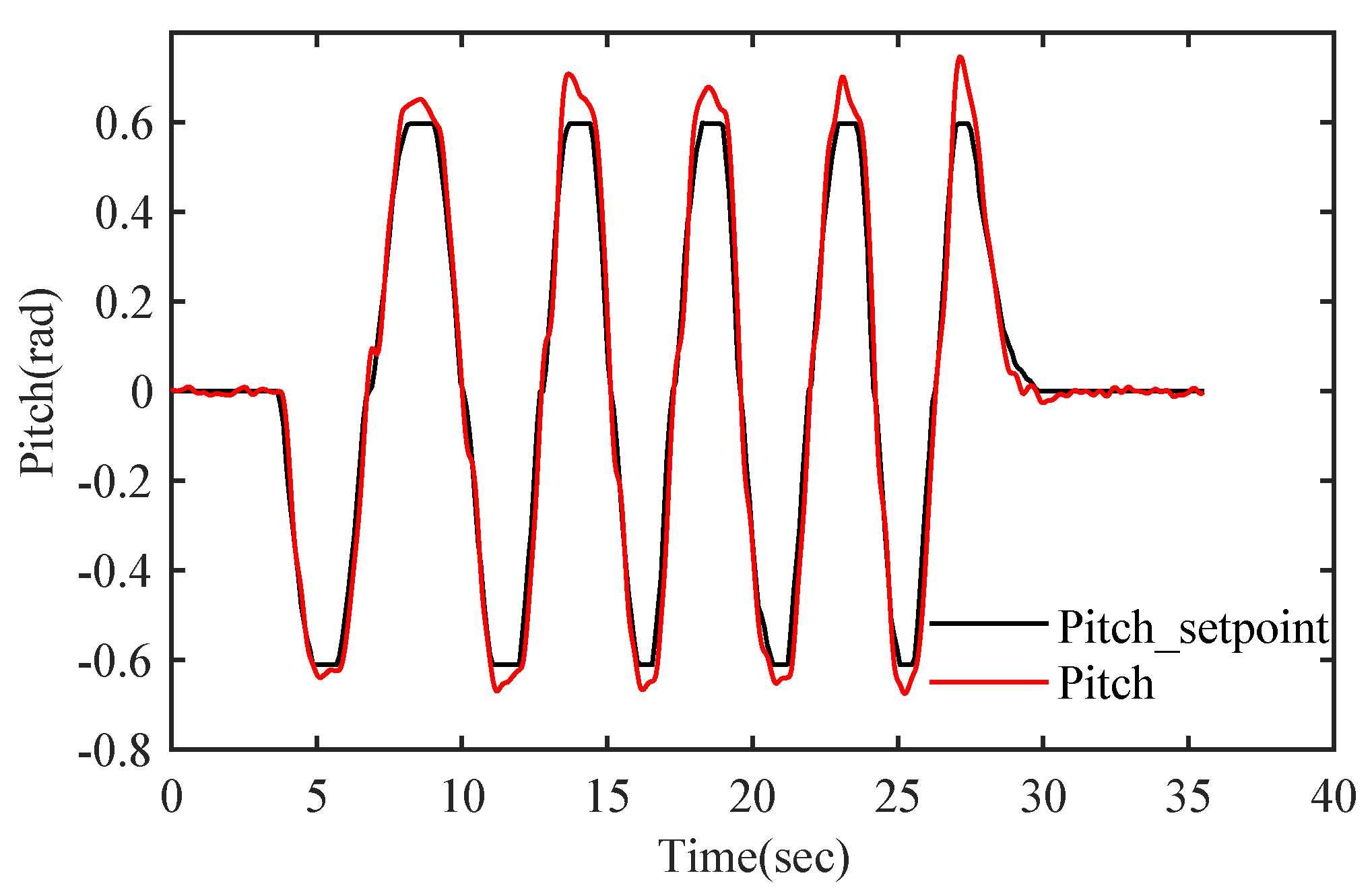
6.2. Verification of Aircraft Experimental Platform
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Pazooki, M.; Mazinan, A.H. Hybrid fuzzy-based sliding-mode control approach, optimized by genetic algorithm for quadrotor unmanned aerial vehicles. Complex Intell. Syst. 2018, 4, 79–93. [Google Scholar] [CrossRef] [Green Version]
- Roberge, V.; Tarbouchi, M.; Labonté, G. Fast Genetic Algorithm Path Planner for Fixed-Wing Military UAV Using GPU. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 2105–2117. [Google Scholar] [CrossRef]
- Jordan, S.; Moore, J.; Hovet, S.; Box, J.; Perry, J.; Kirsche, K.; Tse, Z.T.H. State-of-the-art technologies for UAV inspections. IET Radar Sonar Navig. 2018, 12, 151–164. [Google Scholar] [CrossRef]
- Yang, L.; Fan, J.; Liu, Y.; Li, E.; Peng, J.; Liang, Z. A review on state-of-the-art power line inspection techniques. IEEE Trans. Instrum. Meas. 2020, 69, 9350–9365. [Google Scholar] [CrossRef]
- Zhang, S.; Xue, X.; Chen, C.; Sun, Z.; Sun, T. Development of a low-cost quadrotor UAV based on ADRC for agricultural remote sensing. Int. J. Agric. Biol. Eng. 2019, 12, 82–87. [Google Scholar] [CrossRef]
- Emran, B.J.; Najjaran, H. A review of quadrotor: An underactuated mechanical system. Annu. Rev. Control 2018, 46, 165–180. [Google Scholar] [CrossRef]
- Moreno-Valenzuela, J.; Pérez-Alcocer, R.; Guerrero-Medina, M.; Dzul, A. Nonlinear PID-type controller for quadrotor trajectory tracking. IEEE/ASME Trans. Mechatron. 2018, 23, 2436–2447. [Google Scholar] [CrossRef]
- Najm, A.A.; Ibraheem, I.K. Nonlinear PID controller design for a 6-DOF UAV quadrotor system. Eng. Sci. Technol. 2019, 22, 1087–1097. [Google Scholar] [CrossRef]
- Miranda-Colorado, R.; Aguilar, L.T. Robust PID control of quadrotors with power reduction analysis. ISA Trans. 2020, 98, 47–62. [Google Scholar] [CrossRef] [PubMed]
- Okyere, E.; Bousbaine, A.; Poyi, G.T.; Joseph, A.K.; Andrade, J.M. Lqr controller design for quad-rotor helicopters. J. Eng. 2019, 17, 4003–4007. [Google Scholar] [CrossRef]
- Jian, P.; Changlong, L. UAV attitude control with LQR controller based on extended state observer. J. Syst. Simul. 2018, 30, 753–759. [Google Scholar]
- Razmi, H.; Afshinfar, S. Neural network-based adaptive sliding mode control design for position and attitude control of a quadrotor UAV. Aerosp. Sci. Technol. 2019, 91, 12–27. [Google Scholar] [CrossRef]
- Islam, M.; Okasha, M.; Sulaeman, E. A model predictive control (mpc) approach on unit quaternion orientation based quadrotor for trajectory tracking. Int. J. Control. Autom. Syst. 2019, 17, 2819–2832. [Google Scholar] [CrossRef]
- Eskandarpour, A.; Sharf, I. A constrained error-based MPC for path following of quadrotor with stability analysis. Nonlinear Dyn. 2020, 99, 899–918. [Google Scholar] [CrossRef]
- Li, S.; Wang, Y.; Tan, J. Adaptive and robust control of quadrotor aircrafts with input saturation. Nonlinear Dyn. 2017, 89, 255–265. [Google Scholar] [CrossRef]
- Song, Z.; Wang, Y.; Liu, L.; Cheng, Z.; Yang, Y. Research on Attitude Control of Quadrotor UAV Based on Active Disturbance Rejection Control. In Proceedings of the 2020 Chinese Control And Decision Conference (CCDC), Hefei, China, 22–24 August 2020; pp. 5051–5056. [Google Scholar]
- Zhou, Z.; Huang, R.; Ou, X.; Wang, W.; Lei, X. Pd-adrc cascade control for quadrotor system. Syst. Eng. Electron. 2018, 40, 2055–2061. [Google Scholar]
- Zhao, L.; Dai, L.; Xia, Y.; Li, P. Attitude control for quadrotors subjected to wind disturbances via active disturbance rejection control and integral sliding mode control. Mech. Syst. Signal Process. 2019, 129, 531–545. [Google Scholar] [CrossRef]
- Lotufo, M.A.; Colangelo, L.; Perez-Montenegro, C.; Canuto, E.; Novara, C. UAV quadrotor attitude control: An ADRC-EMC combined approach. Control. Eng. Pract. 2019, 84, 13–22. [Google Scholar] [CrossRef]
- Shen, S.; Xu, J. Attitude Active Disturbance Rejection Control of the Quadrotor and Its Parameter Tuning. Int. J. Aerosp. Eng. 2020, 2020, 8876177. [Google Scholar] [CrossRef]
- Cai, Z.; Lou, J.; Zhao, J.; Wu, K.; Liu, N.; Wang, Y.X. Quadrotor trajectory tracking and obstacle avoidance by chaotic grey wolf optimization-based active disturbance rejection control. Mech. Syst. Signal Process. 2019, 128, 636–654. [Google Scholar] [CrossRef]
- He, H.; Duan, H. A multi-strategy pigeon-inspired optimization approach to active disturbance rejection control parameters tuning for vertical take-off and landing fixed-wing UAV. Chin. J. Aeronaut. 2021. [Google Scholar] [CrossRef]
- Zhou, X.; Gao, H.; Zhao, B.; Zhao, L. A GA-based parameters tuning method for an ADRC controller of ISP for aerial remote sensing applications. ISA Trans. 2018, 81, 318–328. [Google Scholar] [CrossRef]
- Beal, T.R. Digital simulation of atmospheric turbulence for Dryden and von Karman models. J. Guid. Control. Dyn. 1993, 16, 132–138. [Google Scholar] [CrossRef]
- Han, J. From PID to active disturbance rejection control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Guo, B.Z.; Zhao, Z.L. On the convergence of an extended state observer for nonlinear systems with uncertainty. Syst. Control. Lett. 2011, 60, 420–430. [Google Scholar] [CrossRef]
- Engelbrecht, A.P. Fundamentals of Computational Swarm Intelligence, 1st ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2006. [Google Scholar]
- Pires, E.S.; Machado, J.T.; de Moura Oliveira, P.B.; Cunha, J.B.; Mendes, L. Particle swarm optimization with fractional-order velocity. Nonlinear Dyn. 2010, 61, 295–301. [Google Scholar] [CrossRef] [Green Version]
- Zameer, A.; Muneeb, M.; Mirza, S.M.; Raja, M.A.Z. Fractional-order particle swarm based multi-objective PWR core loading pattern optimization. Ann. Nucl. Energy 2020, 135, 106982. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Symbol | Physical Meaning | Value | Unit |
|---|---|---|---|
| m | Total mass of quadrotors | 1.4 | |
| d | Rotor arm length | 0.225 | |
| X-axis moment of inertia | 0.0211 | ||
| X-axis moment of inertia | 0.0219 | ||
| X-axis moment of inertia | 0.0366 | ||
| Propeller pull coefficient | 1.022 | ||
| Torque coefficient | 1.401 |
| Parameter | Range of Value | Parameter | Range of Value |
|---|---|---|---|
| c | |||
| r |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| 81 | c | 225 | |
| 1695 | 210 | ||
| 6709 | 48 | ||
| r | 215 | 0.004 | |
| 20 |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| 250 | c | 5 | |
| 2000 | 200 | ||
| 3000 | 47.4 | ||
| r | 25 | 0.004 | |
| 20 |
| Algorithm | Max Deviation (Rad) | RMSE |
|---|---|---|
| ADRC | 0.0442 | 0.0111 |
| PSO-ADRC | 0.0425 | 0.0093 |
| AGAPSO-ADRC | 0.0384 | 0.0081 |
| FPSO-ADRC | 0.0249 | 0.0077 |
| FOFPSO-ADRC | 0.0210 | 0.0071 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Q.; Wei, Y.; Li, X. Quadrotor Attitude Control by Fractional-Order Fuzzy Particle Swarm Optimization-Based Active Disturbance Rejection Control. Appl. Sci. 2021, 11, 11583. https://doi.org/10.3390/app112411583
Zhang Q, Wei Y, Li X. Quadrotor Attitude Control by Fractional-Order Fuzzy Particle Swarm Optimization-Based Active Disturbance Rejection Control. Applied Sciences. 2021; 11(24):11583. https://doi.org/10.3390/app112411583
Chicago/Turabian StyleZhang, Qi, Yaoxing Wei, and Xiao Li. 2021. "Quadrotor Attitude Control by Fractional-Order Fuzzy Particle Swarm Optimization-Based Active Disturbance Rejection Control" Applied Sciences 11, no. 24: 11583. https://doi.org/10.3390/app112411583
APA StyleZhang, Q., Wei, Y., & Li, X. (2021). Quadrotor Attitude Control by Fractional-Order Fuzzy Particle Swarm Optimization-Based Active Disturbance Rejection Control. Applied Sciences, 11(24), 11583. https://doi.org/10.3390/app112411583