
All Fiber Mach–Zehnder Interferometer Based on Intracavity Micro-Waveguide for a Magnetic Field Sensor



Abstract
:1. Introduction
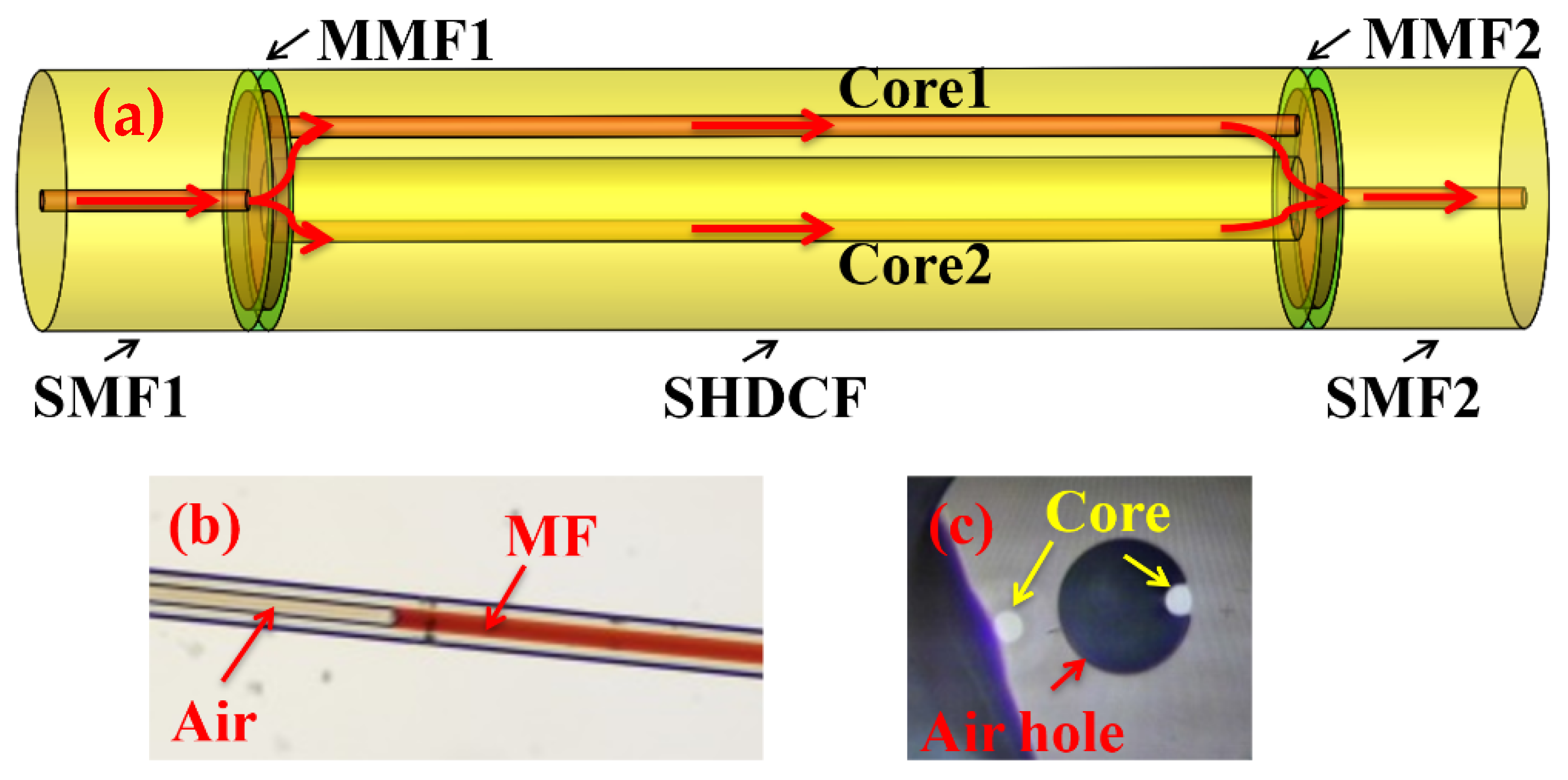
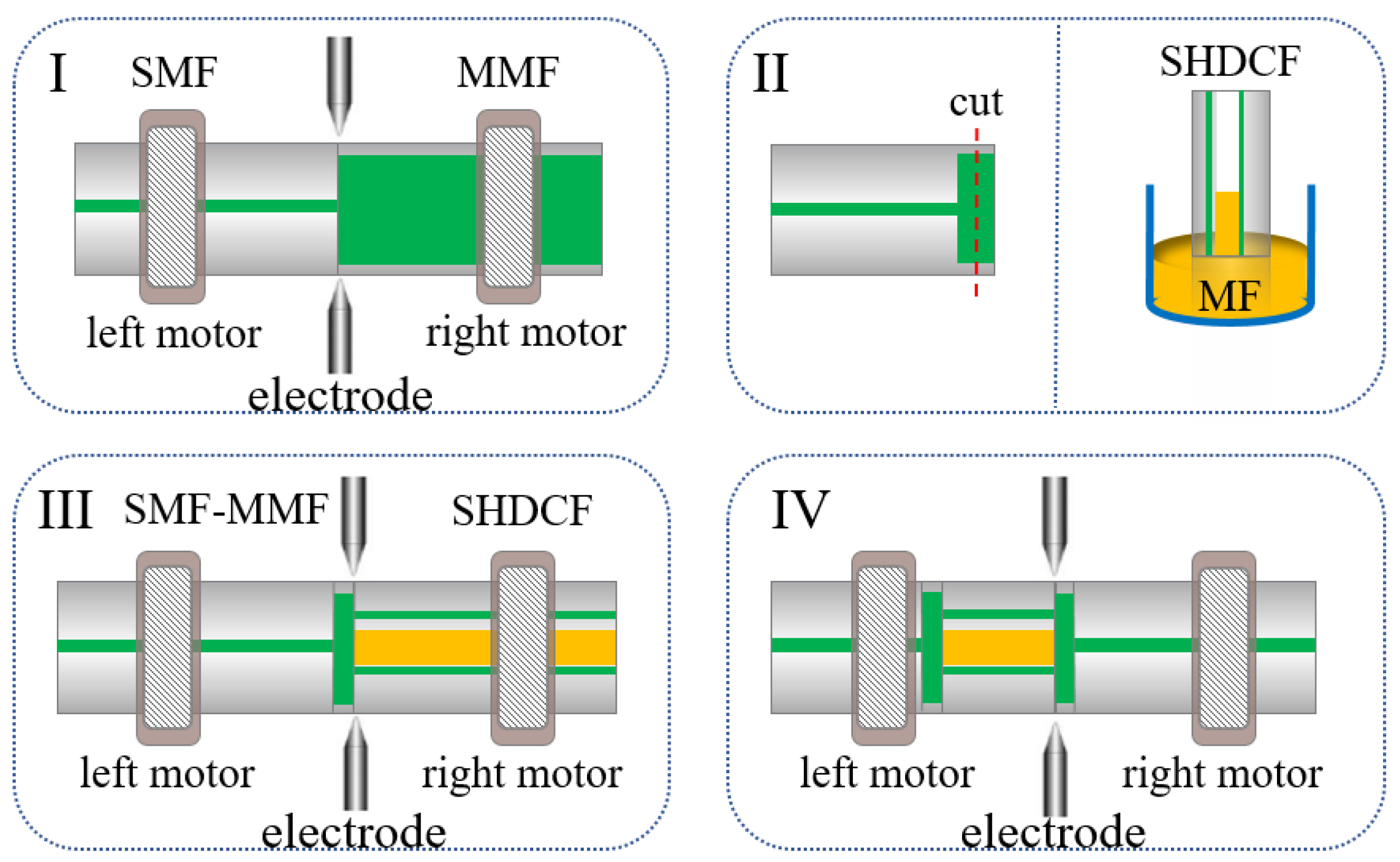
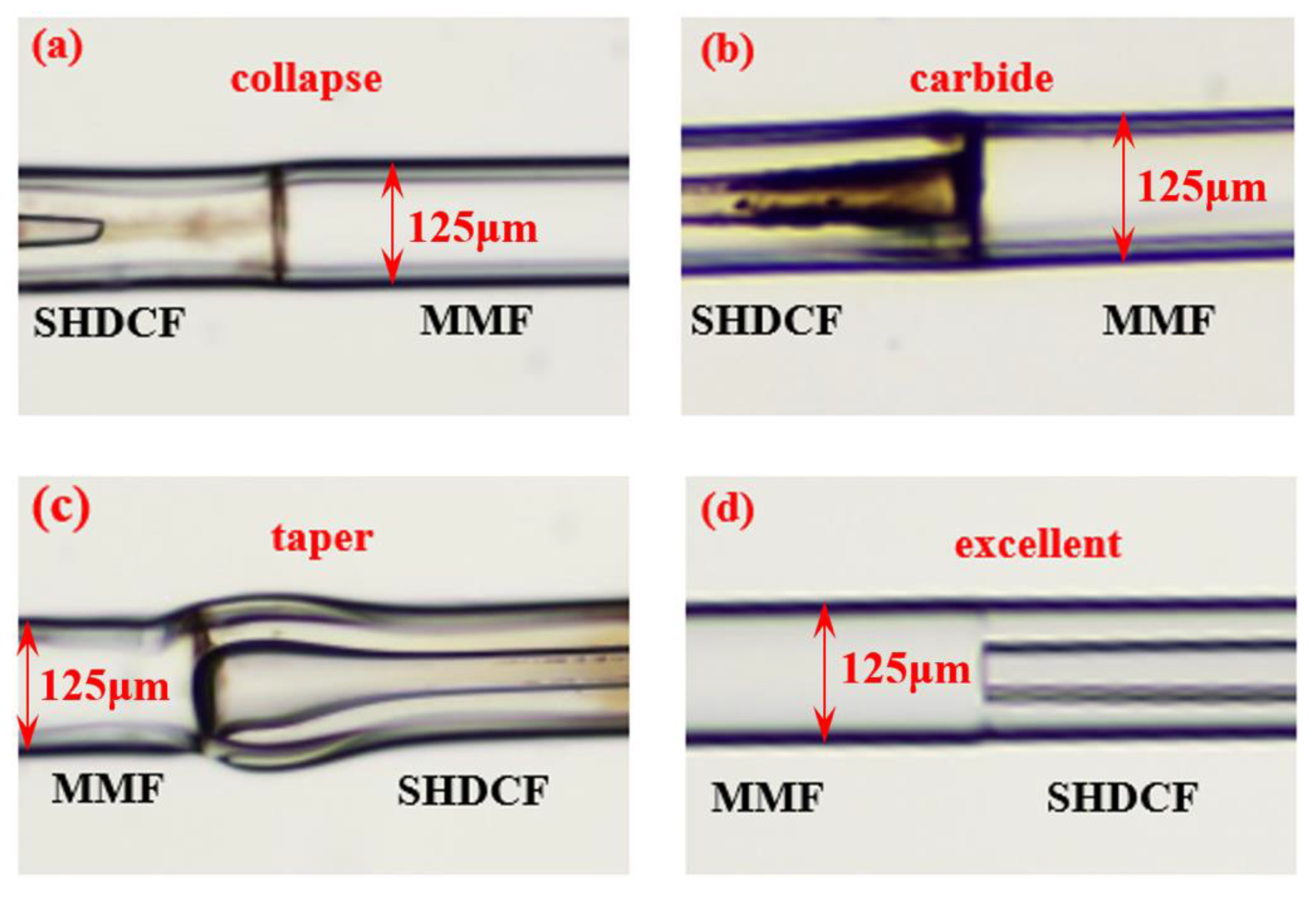
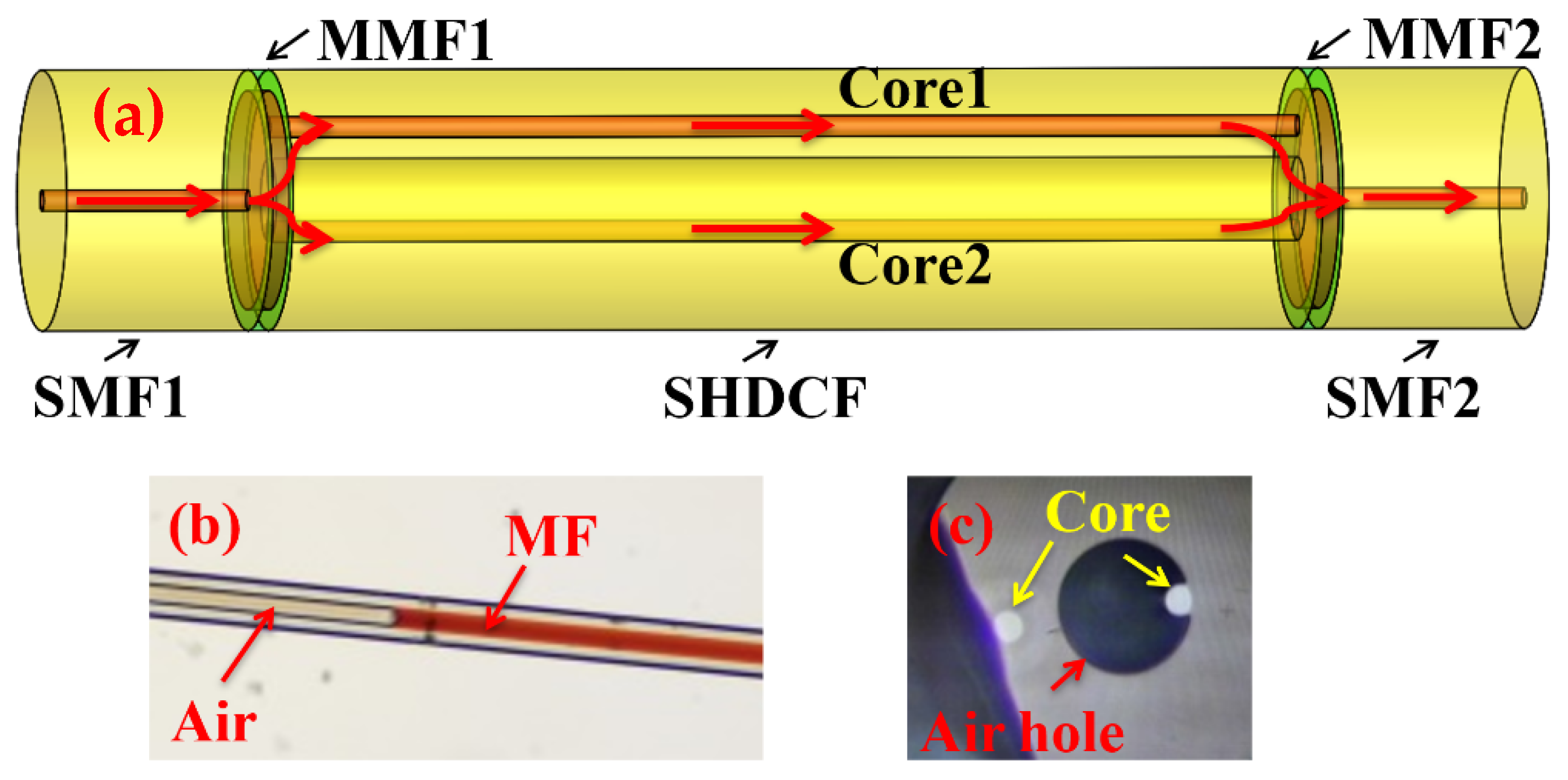
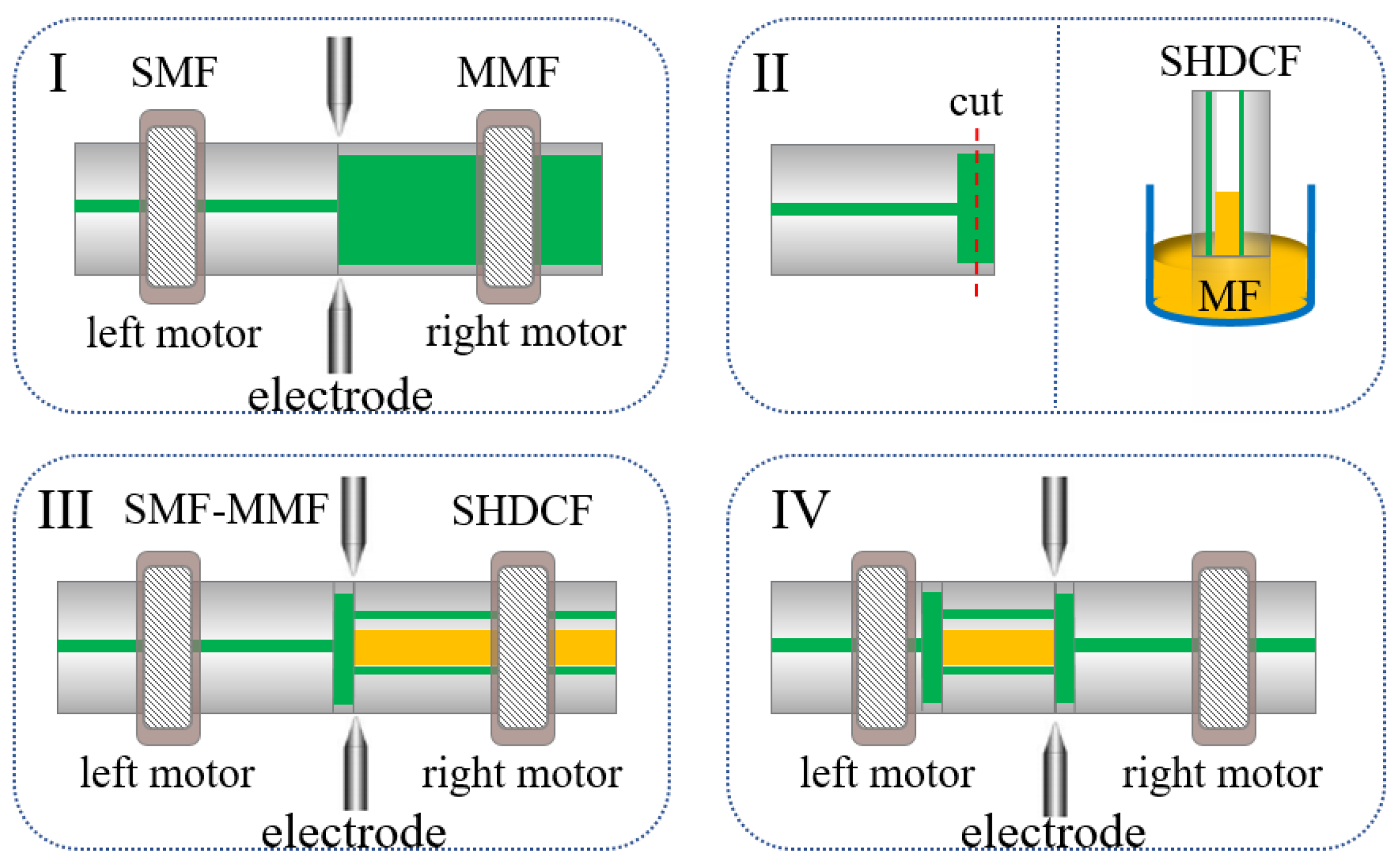
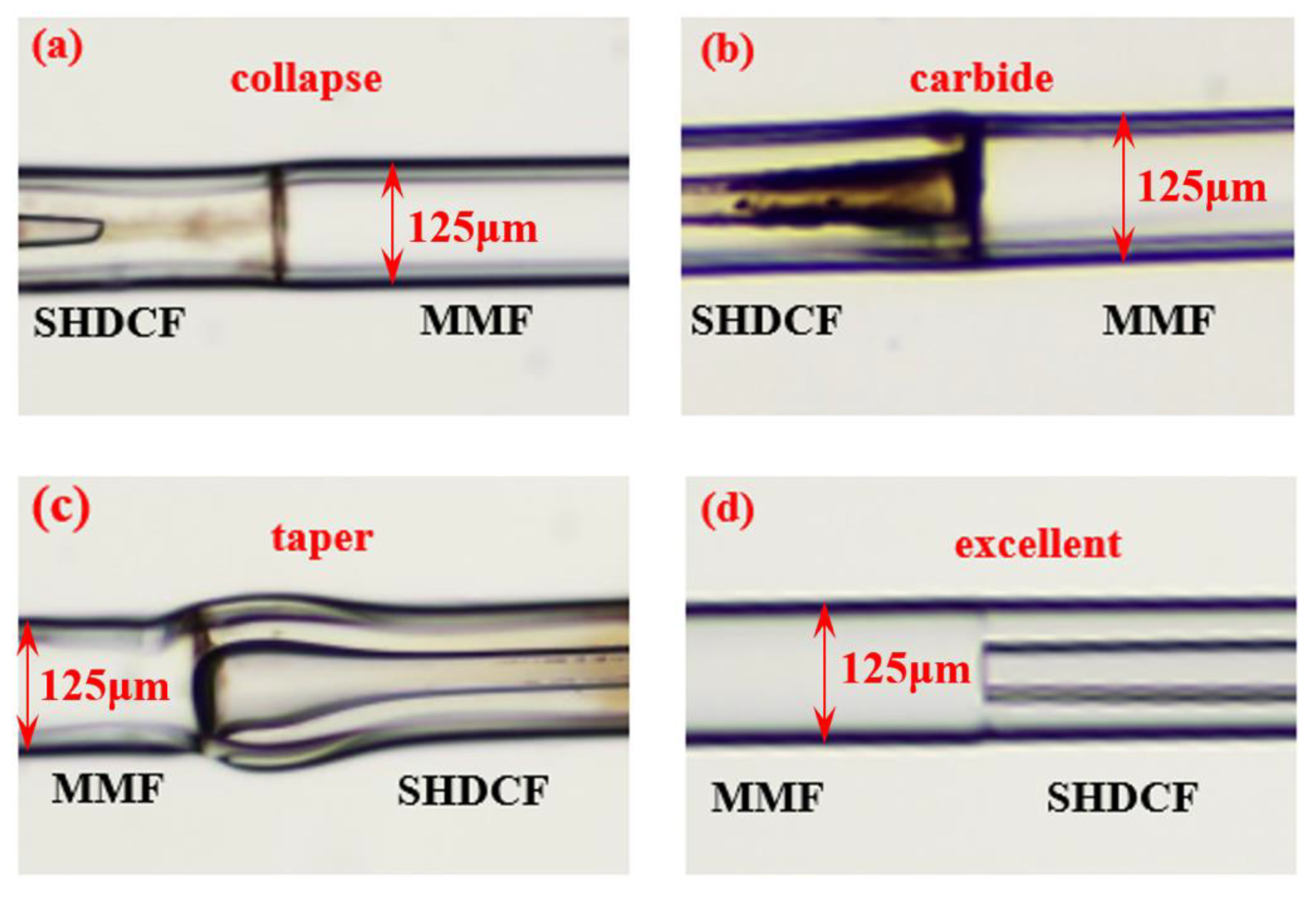
2. Principle and Preparation
3. Results
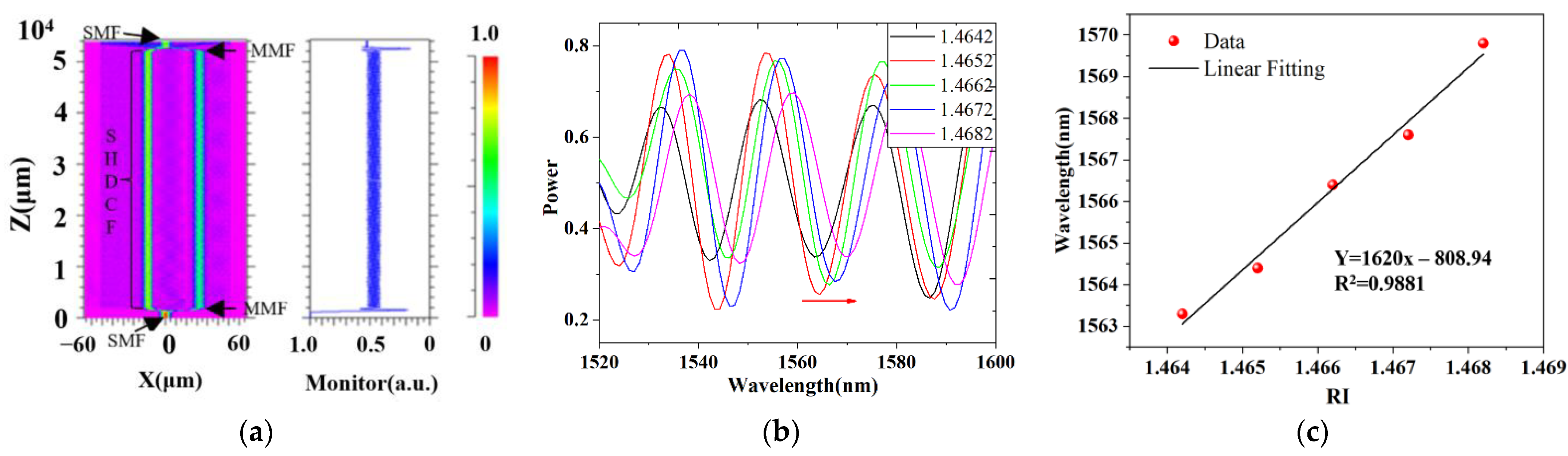
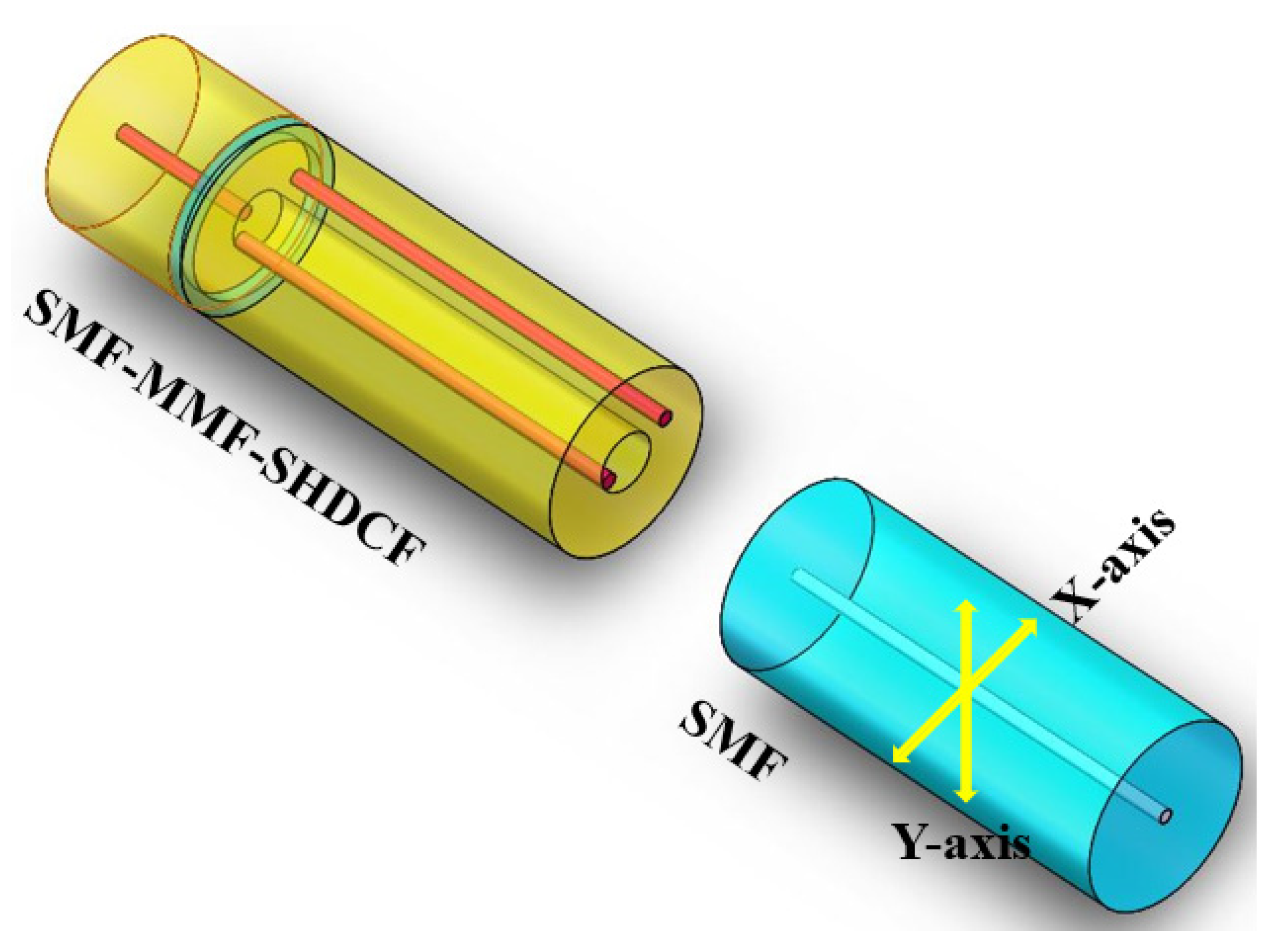
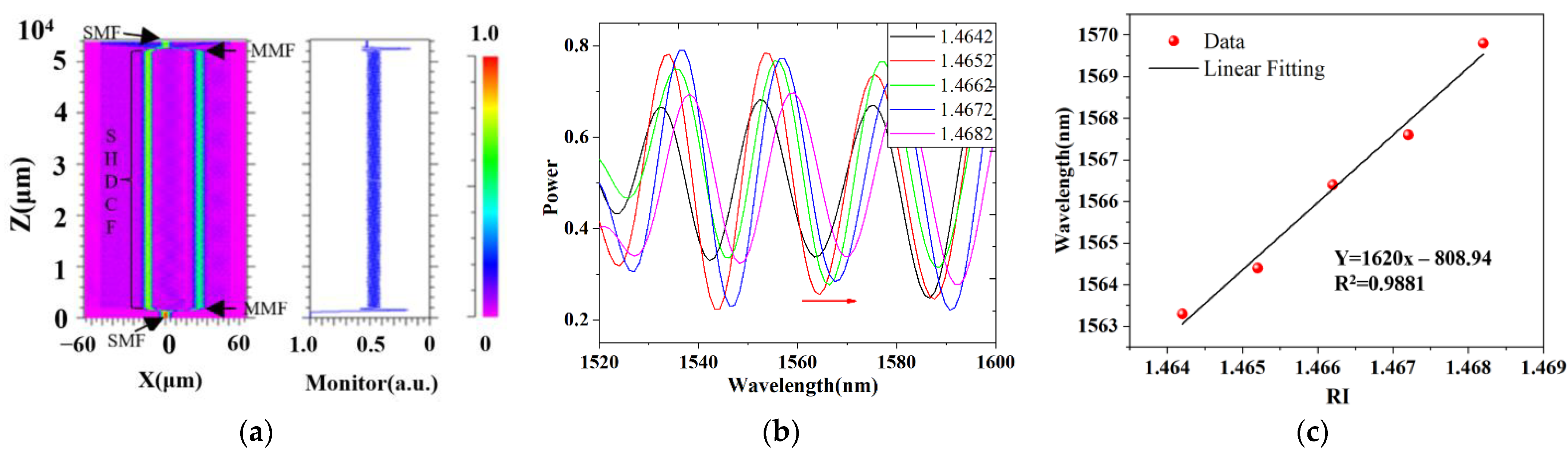
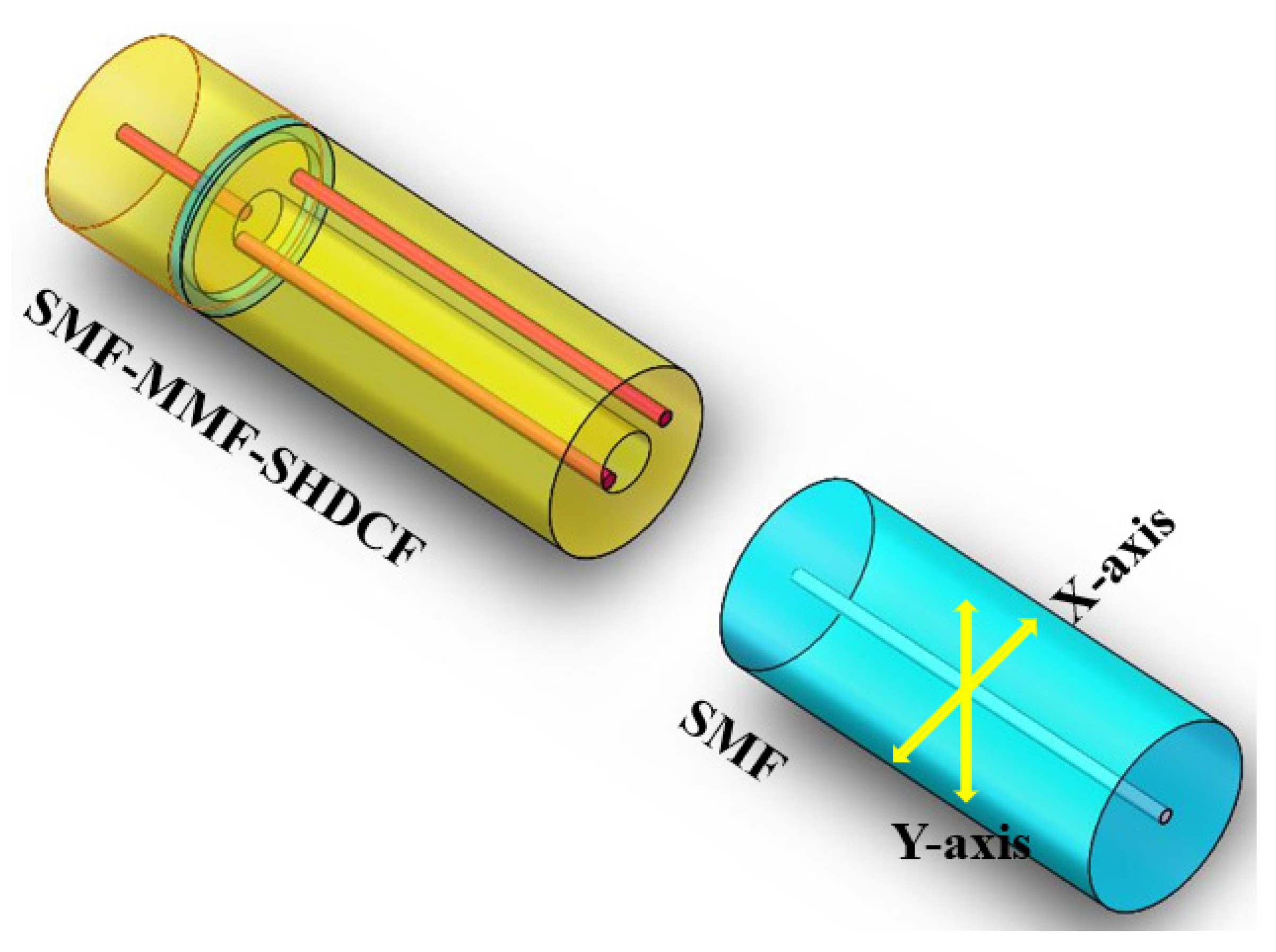
3.1. Simulation of Sensing Structure
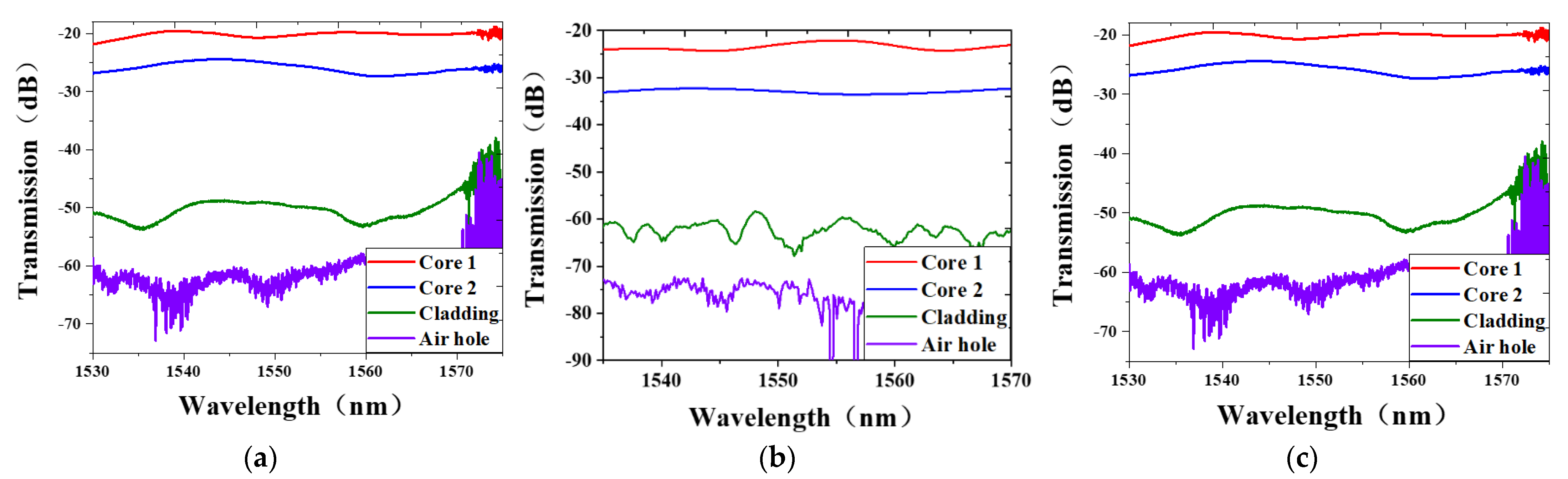
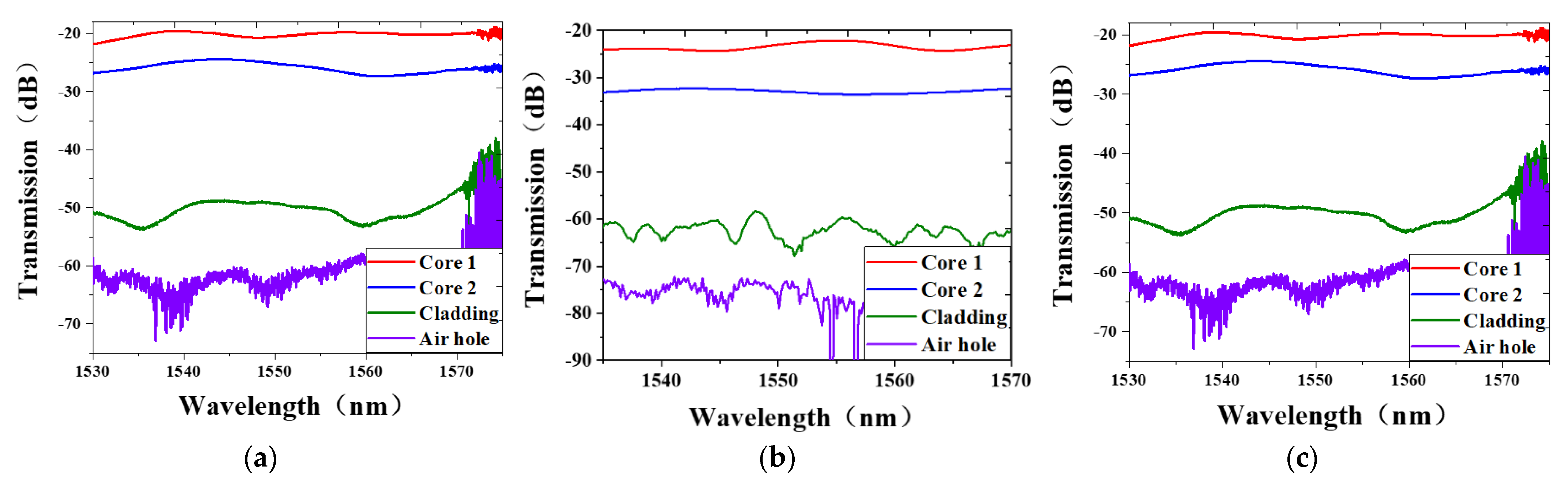
3.2. The Light Path Receiving Verification
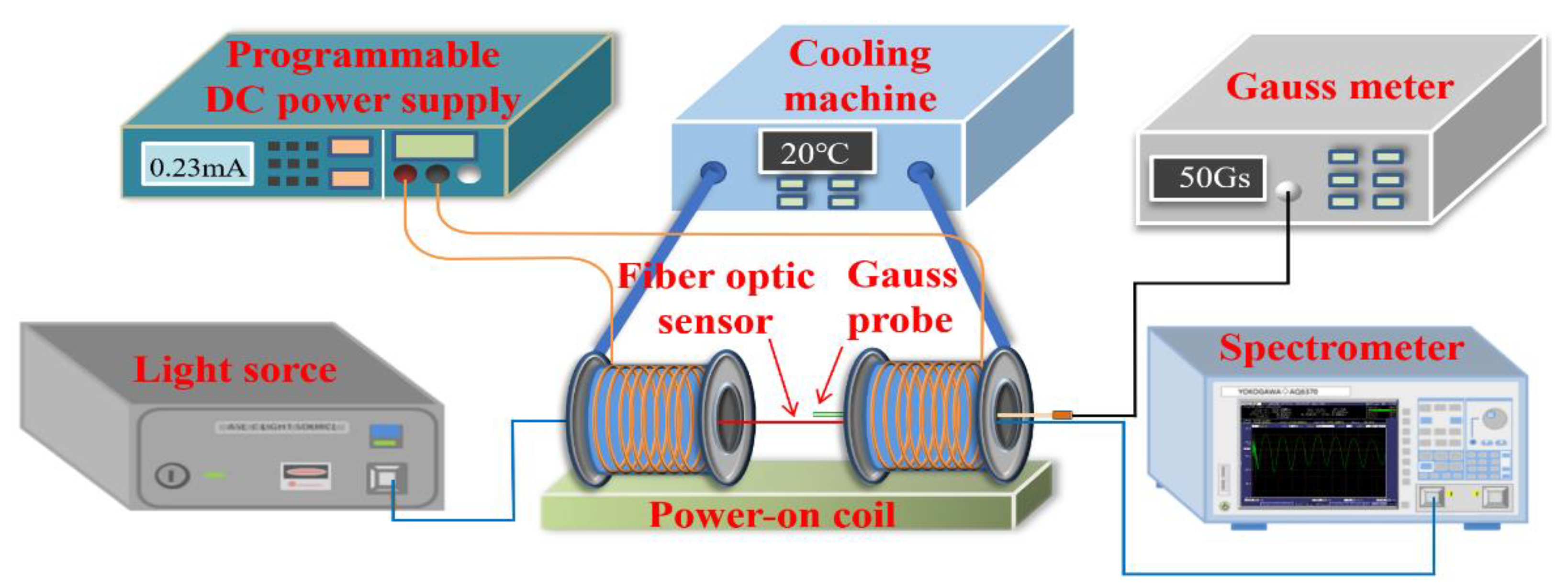
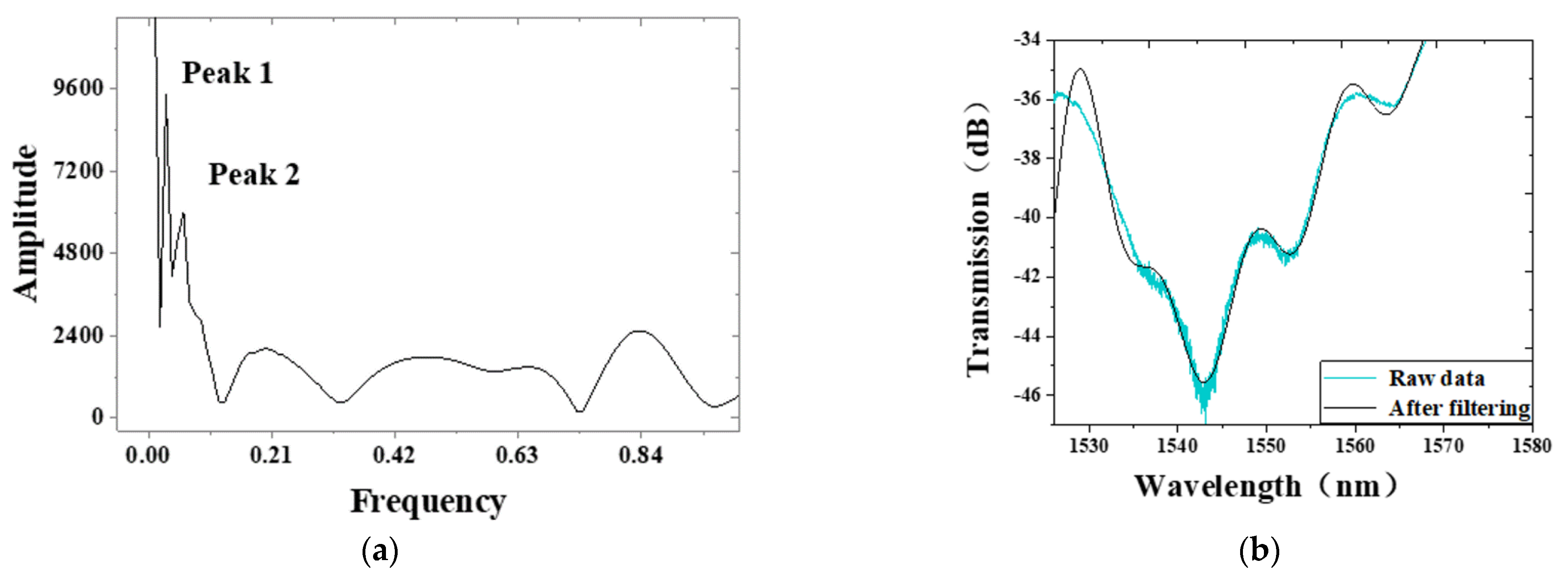
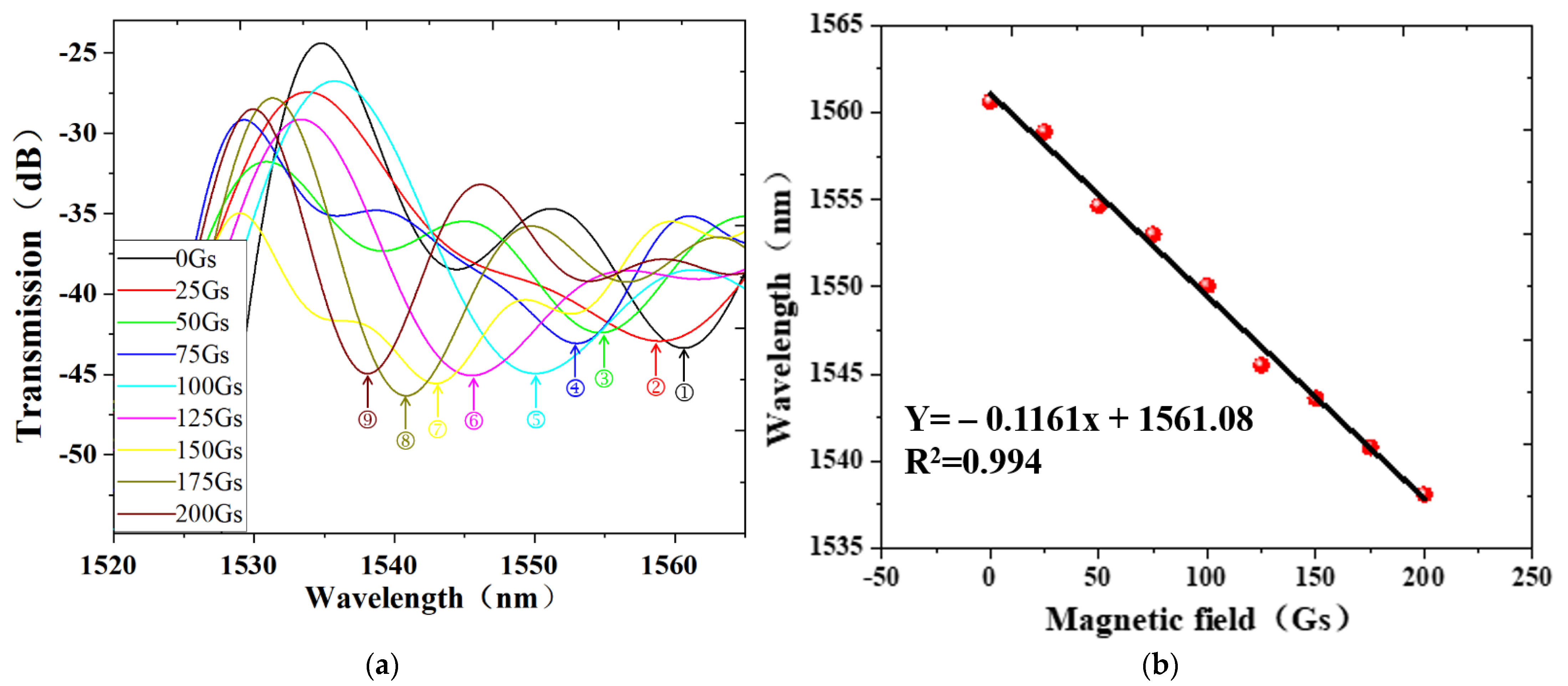
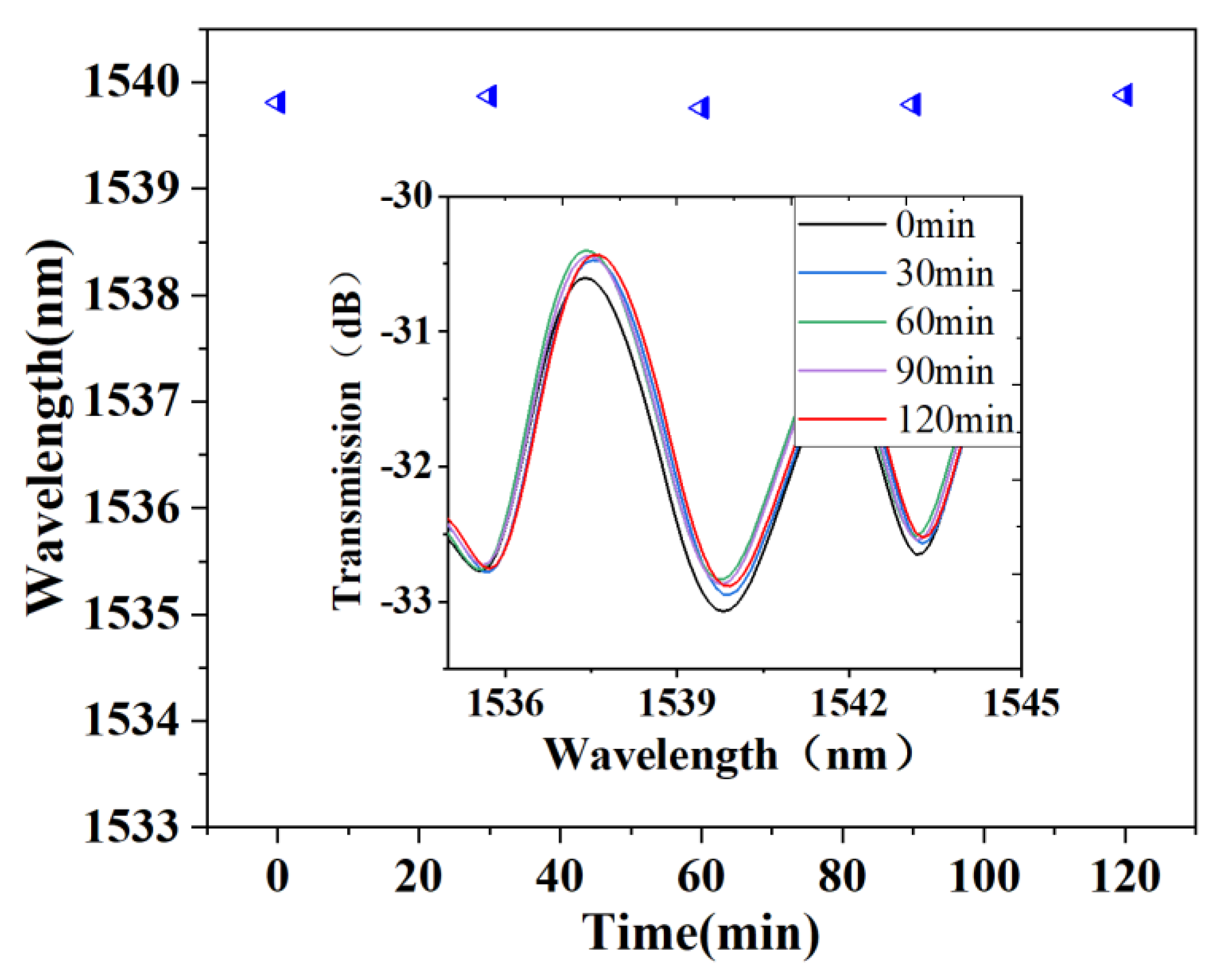
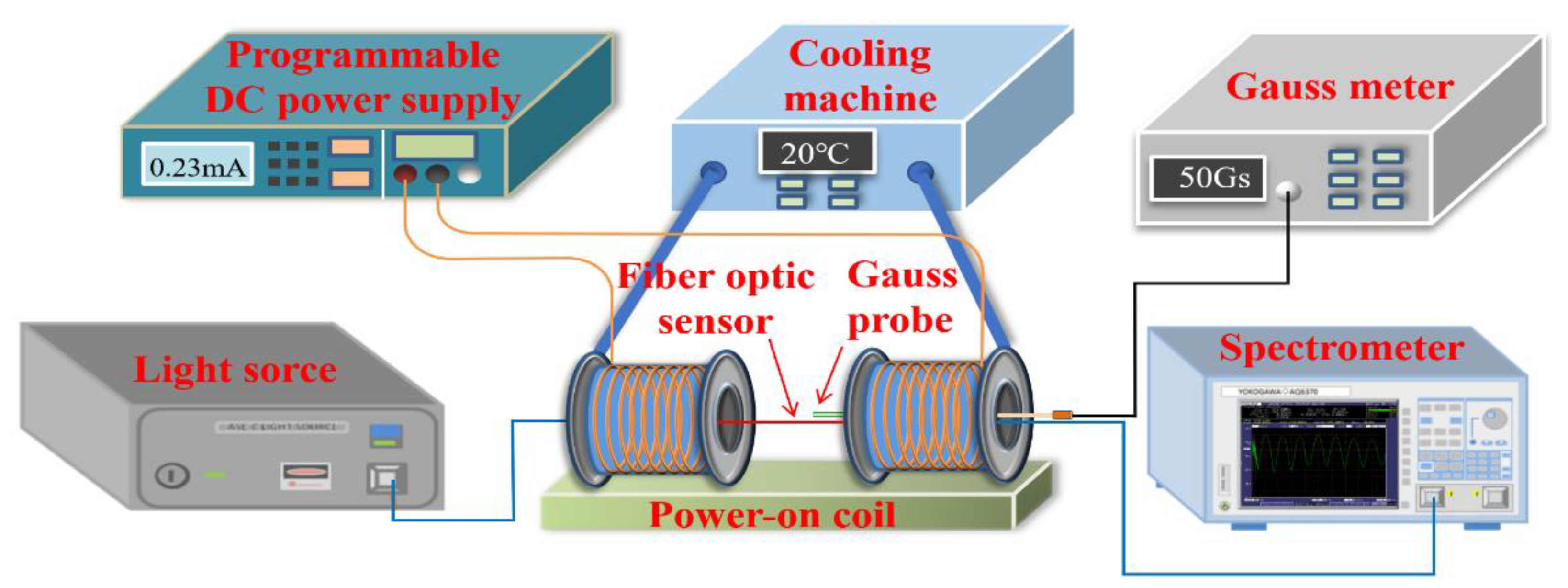
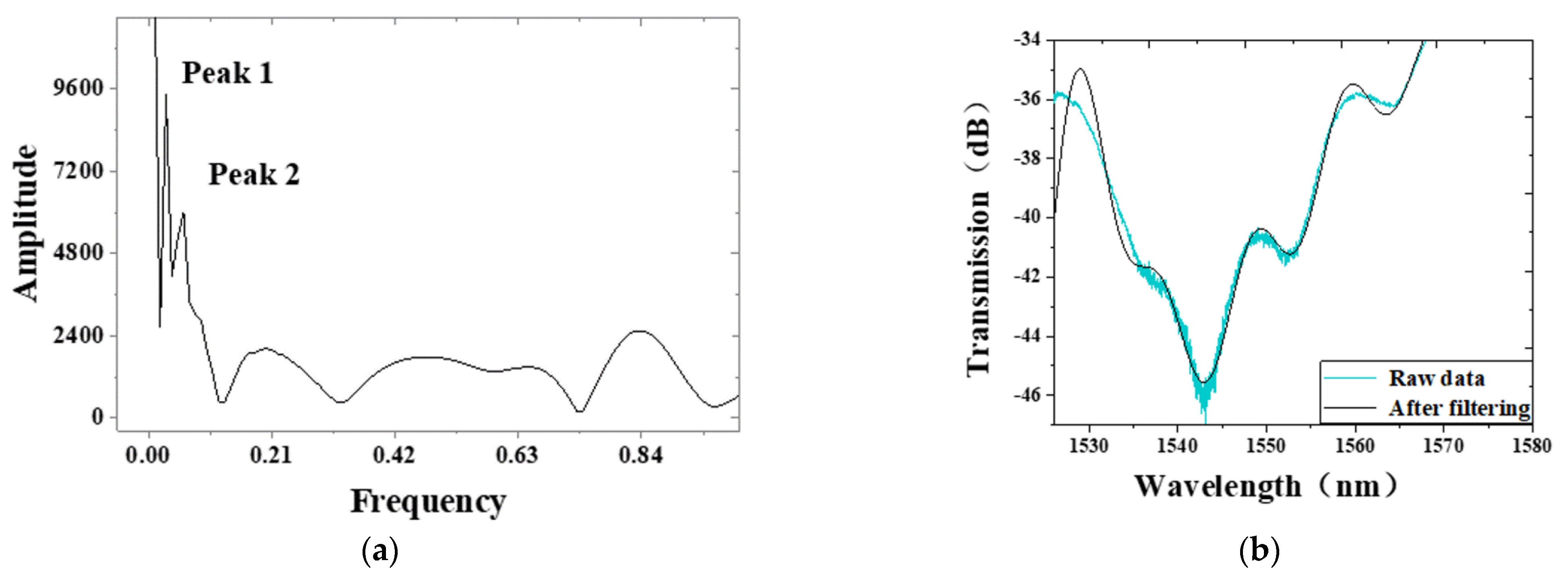
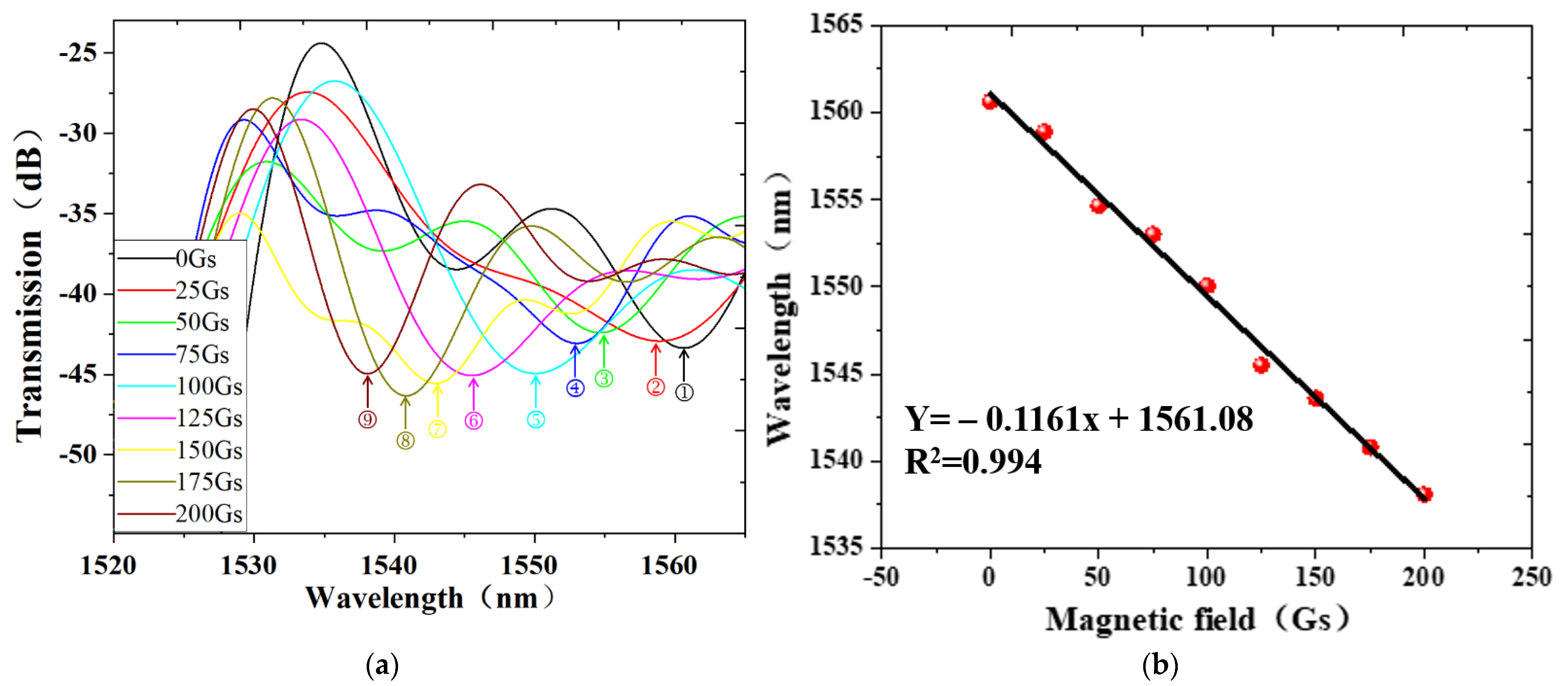
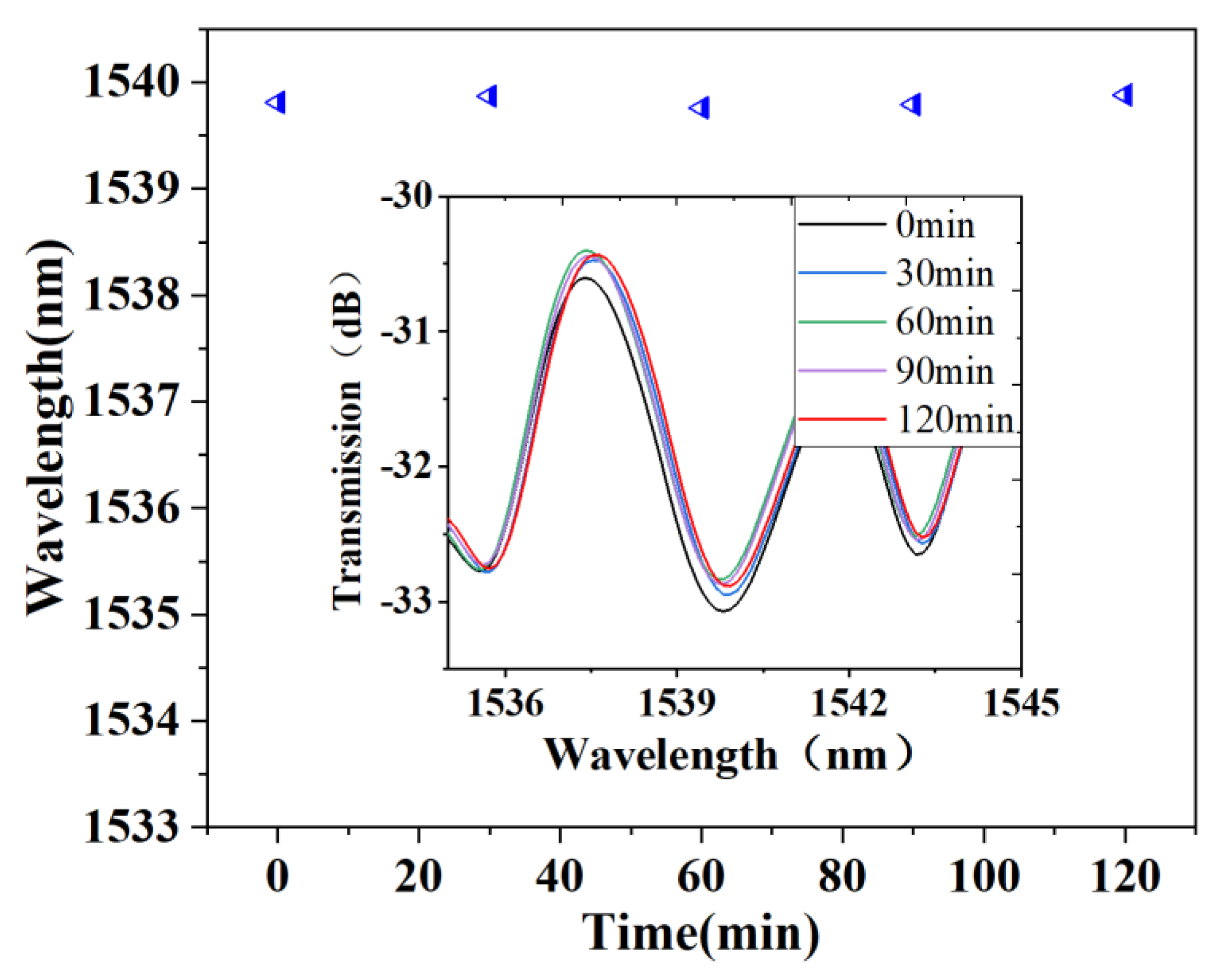
3.3. The Experimental Analysis
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Fotis, G.P.; Rapanakis, A.G.; Gonos, I.F.; Stathopulos, I.A. Measurement of the magnetic field radiating by electrostatic discharges during the verification of the ESD generators. Measurement 2006, 40, 428–436. [Google Scholar] [CrossRef]
- Zheng, J.; Dong, X.Y.; Zu, P.; Ji, J.H.; Su, H.B.; Shum, P.P. Intensity-modulated magnetic field sensor based on magnetic fluid and optical fiber gratings. Appl. Phys. Lett. 2015, 103, 183511. [Google Scholar] [CrossRef]
- Ying, Y.; Zhao, Y.; Lv, R.Q.; Li, J. Thermally modulated slow light in magnetic fluid photonic crystal. IEEE Photonics Technol. Lett. 2015, 27, 883–886. [Google Scholar] [CrossRef]
- Lopez, J.; Dante, A.; Carvalho, C.; Allil, R.; Werneck, M. Simulation and experimental study of FBG-based magnetic field sensors with Terfenol-D composites in different geometric shapes. Measurement 2021, 172, 108893. [Google Scholar] [CrossRef]
- Culshaw, B. Optical fiber sensor technologies: Opportunities and-perhaps-pitfalls. J. Lightwave Technol. 2004, 22, 39–50. [Google Scholar] [CrossRef]
- Wang, S.F.; Chiang, C.C. A notched long-period fiber grating magnetic field sensor based on nanoparticle magnetic fluid. Appl. Sci. 2016, 6, 9. [Google Scholar] [CrossRef]
- Chen, X.; Zhu, X.Q.; Xu, Z.Y.; Lin, Y.C.; He, G.T. An inductance-based technique for the measurement of magnetic moment of the magnetorheological fluids. Measurement 2014, 47, 693–697. [Google Scholar] [CrossRef]
- Zhao, Y.; Wu, D.; Lv, R.Q.; Ying, Y. Tunable characteristics and mechanism analysis of the magnetic fluid refractive index with applied magnetic field. IEEE Trans. Magn. 2014, 50, 4600205. [Google Scholar] [CrossRef]
- Ying, Y.; Zhao, Y.; Lv, R.Q.; Hu, H.F. Magnetic field measurement using Surface Plasmon Resonance sensing technology combined with magnetic fluid photonic crystal. IEEE Trans. Instrum. Meas. 2016, 65, 170–176. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhang, Y.Y.; Lv, R.Q.; Wang, Q. Novel optical devices based on the tunable refractive index of magnetic fluid and their characteristics. J. Magn. Magn. Mater. 2011, 323, 2987–2996. [Google Scholar] [CrossRef]
- Liu, Y.X.; Li, X.G.; Zhang, Y.N.; Zhao, Y. Fiber-optic sensors based on Vernier effect. Measurement 2021, 167, 108451. [Google Scholar] [CrossRef]
- Zhang, J.Y.; Chen, F.Y.; Wang, R.H.; Qiao, X.G. Vector magnetic field measurement based on magnetic fluid and high-order cladding-mode Bragg grating. Opt. Laser Technol. 2021, 143, 107264. [Google Scholar] [CrossRef]
- Dai, J.X.; Yang, M.H.; Li, X.B.; Liu, H.L.; Tong, X.L. Magnetic field sensor based on magnetic fluid clad etched fiber Bragg grating. Opt. Fiber Technol. 2011, 17, 210–213. [Google Scholar] [CrossRef]
- Zhao, Y.; Wang, X.X.; Lv, R.Q.; Li, G.L.H.; Zheng, K.; Zhou, Y.F. Highly sensitive reflective Fabry-Perot magnetic field sensor using magnetic fluid based on Vernier effect. IEEE Trans. Instrum. Meas. 2021, 70, 7000808. [Google Scholar] [CrossRef]
- Xia, J.; Wang, F.Y.; Luo, H.; Wang, Q.; Xiong, S.D. A magnetic field sensor based on a magnetic fluid-filled FP-FBG structure. Sensors 2016, 16, 620. [Google Scholar] [CrossRef] [PubMed]
- Bao, L.F.; Dong, X.Y.; Zhang, S.Q.; Shen, C.Y.; Shum, P.P. Magnetic field sensor based on magnetic fluid-infiltrated phase-shifted fiber Bragg grating. IEEE Sens. J. 2018, 18, 4008–4012. [Google Scholar] [CrossRef]
- Zhang, J.Y.; Qiao, X.G.; Wang, R.H.; Chen, F.Y.; Bao, W.J. Highly sensitivity fiber-optic vector magnetometer based on two-mode fiber and magnetic fluid. IEEE Sens. J. 2019, 19, 2576–2580. [Google Scholar] [CrossRef]
- Zhou, X.; Li, X.G.; Li, S.G.; An, G.W.; Cheng, T.L. Magnetic field sensing based on SPR optical fiber sensor interacting with magnetic fluid. IEEE Trans. Instrum. Meas. 2019, 68, 234–239. [Google Scholar] [CrossRef]
- Zhao, Y.; Wang, X.X.; Lv, R.Q.; Zheng, H.K.; Zhou, Y.F.; Chen, M.Q. Reflective Highly Sensitive Fabry-Perot Magnetic Field Sensor Based on Magneto-Volume Effect of Magnetic Fluid. IEEE Trans. Instrum. Meas. 2021, 70, 9386132. [Google Scholar] [CrossRef]
- Yin, J.D.; Ruan, S.C.; Liu, T.G.; Jiang, J.F.; Wang, S.; Wei, H.F.; Yan, P.G. All-fiber-optic vector magnetometer based on nano-magnetic fluids filled double-clad photonic crystal fiber. Sens. Actuator B Chem. 2017, 238, 518–524. [Google Scholar] [CrossRef]
- Li, X.G.; Zhou, X.; Zhao, Y.; Lv, R.Q. Multi-modes interferometer for magnetic field and temperature measurement using Photonic crystal fiber filled with magnetic fluid. Opt. Fiber Technol. 2018, 41, 1–6. [Google Scholar] [CrossRef]
- Li, L.C.; Xia, L.; Xie, Z.H.; Liu, D.M. All-fiber Mach-Zehnder interferometers for sensing applications. Opt. Express 2012, 20, 11109–11120. [Google Scholar] [CrossRef] [PubMed]
- Chen, Y.F.; Yang, S.Y.; Tse, W.S.; Horng, H.E.; Hong, C.Y.; Yang, H.C. Thermal effect on the field-dependent refractive index of the magnetic fluid film. Appl. Phys. Lett. 2003, 82, 3481–3483. [Google Scholar] [CrossRef]
- Qu, H.; Skorobogatiy, M. Resonant bio- and chemical sensors using low-refractive-index-contrast liquid-core Bragg fibers. Sens. Actuator B Chem. 2012, 161, 261–268. [Google Scholar] [CrossRef]
- Wu, Y.; Pei, L.; Jin, W.X.; Jiang, Y.C.; Yang, Y.G.; Shen, Y.; Jian, S.S. Highly sensitive curvature sensor based on asymmetrical twin core fiber and multimode fiber. Opt. Laser Technol. 2017, 92, 74–79. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Pei, L.; Wang, J.S.; Ruan, Z.L.; Zheng, J.J.; Li, J.; Ning, T.G. Magnetic field and temperature dual-parameter sensor based on magnetic fluid materials filled photonic crystal fiber. Opt. Express 2020, 28, 1456–1471. [Google Scholar] [CrossRef] [PubMed]
- Zhang, R.; Zhang, S.L.; Li, Y.Q.; Zhao, Y.L.; Jia, Z.X.; Yao, J.L.; Li, Y.X. Mach-Zehnder interferometer cascaded with FBG for simultaneous measurement of magnetic field and temperature. IEEE Sens. J. 2019, 19, 4079–4083. [Google Scholar] [CrossRef]
- Ding, X.Z.; Yang, H.Z.; Qiao, X.G.; Zhang, P.; Tian, O.; Rong, Q.Z.; Nazal, N.A.M.; Lim, K.S.; Ahmad, H. Mach-Zehnder interferometric magnetic field sensor based on a photonic crystal fiber and magnetic fluid. Appl. Opt. 2018, 57, 2050–2056. [Google Scholar] [CrossRef] [PubMed]
- Chen, H.Z.; Shao, H.; Zhang, X.; Hao, Y.X.; Rong, Q.Z. Highly sensitive magnetic field sensor using tapered Mach-Zehnder interferometer. Opt. Lasers Eng. 2018, 107, 78–82. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Core Diameter | Cladding Diameter | Core Refractive Index | Cladding Refractive Index |
|---|---|---|---|---|
| Value | 9 μm | 125 μm | 1.4682 | 1.4627 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, M.; Liu, Q.; Zhao, Y. All Fiber Mach–Zehnder Interferometer Based on Intracavity Micro-Waveguide for a Magnetic Field Sensor. Appl. Sci. 2021, 11, 11569. https://doi.org/10.3390/app112311569
Chen M, Liu Q, Zhao Y. All Fiber Mach–Zehnder Interferometer Based on Intracavity Micro-Waveguide for a Magnetic Field Sensor. Applied Sciences. 2021; 11(23):11569. https://doi.org/10.3390/app112311569
Chicago/Turabian StyleChen, Maoqing, Qifeng Liu, and Yong Zhao. 2021. "All Fiber Mach–Zehnder Interferometer Based on Intracavity Micro-Waveguide for a Magnetic Field Sensor" Applied Sciences 11, no. 23: 11569. https://doi.org/10.3390/app112311569
APA StyleChen, M., Liu, Q., & Zhao, Y. (2021). All Fiber Mach–Zehnder Interferometer Based on Intracavity Micro-Waveguide for a Magnetic Field Sensor. Applied Sciences, 11(23), 11569. https://doi.org/10.3390/app112311569