
Design and Experimental Validation of Power Electric Vehicle Emulator for Testing Electric Vehicle Supply Equipment (EVSE) with Vehicle-to-Grid (V2G) Capability

 , , and
, , and
Abstract
:1. Introduction
2. EV Emulator Needs
3. EV Emulator Design
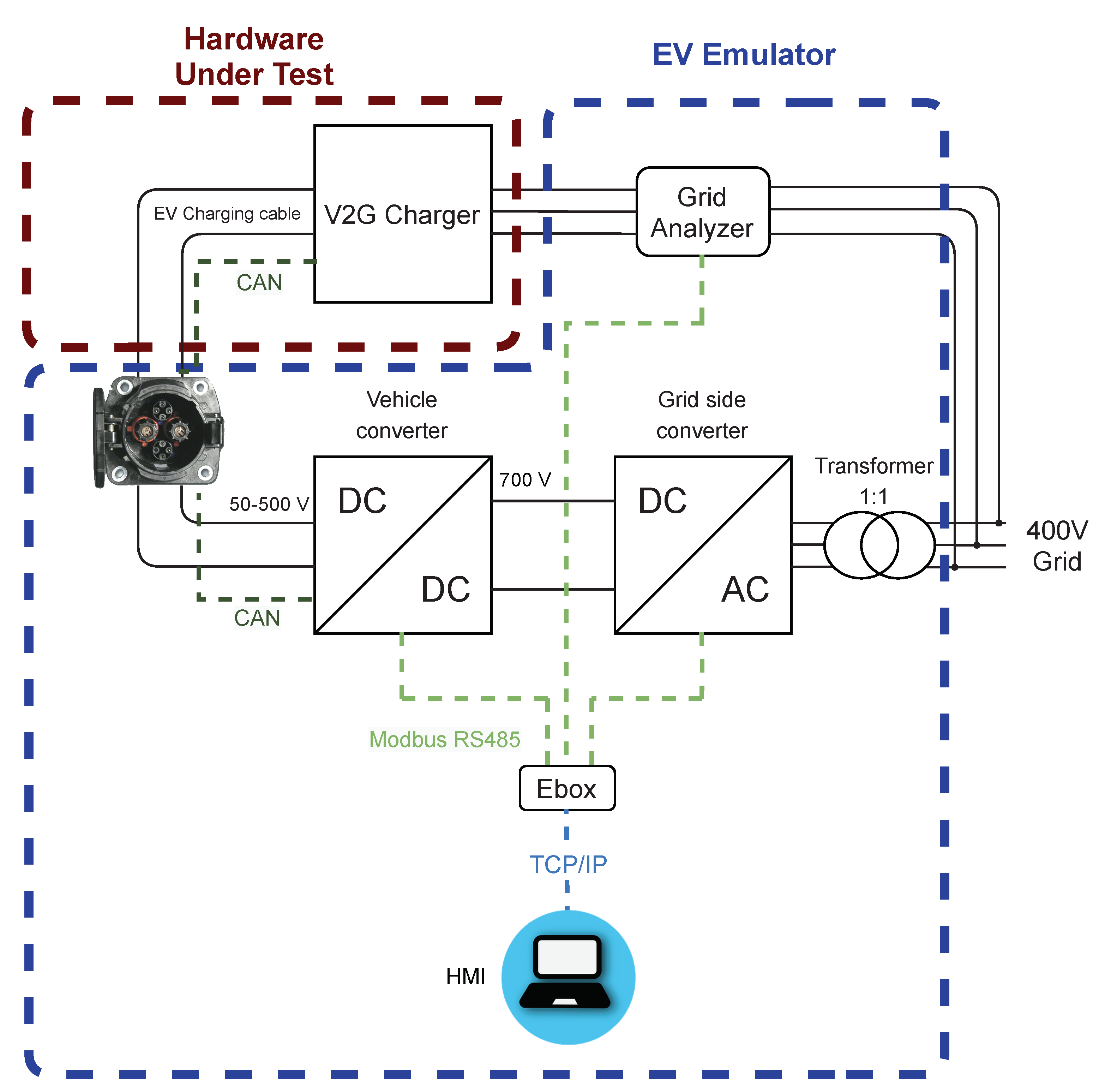
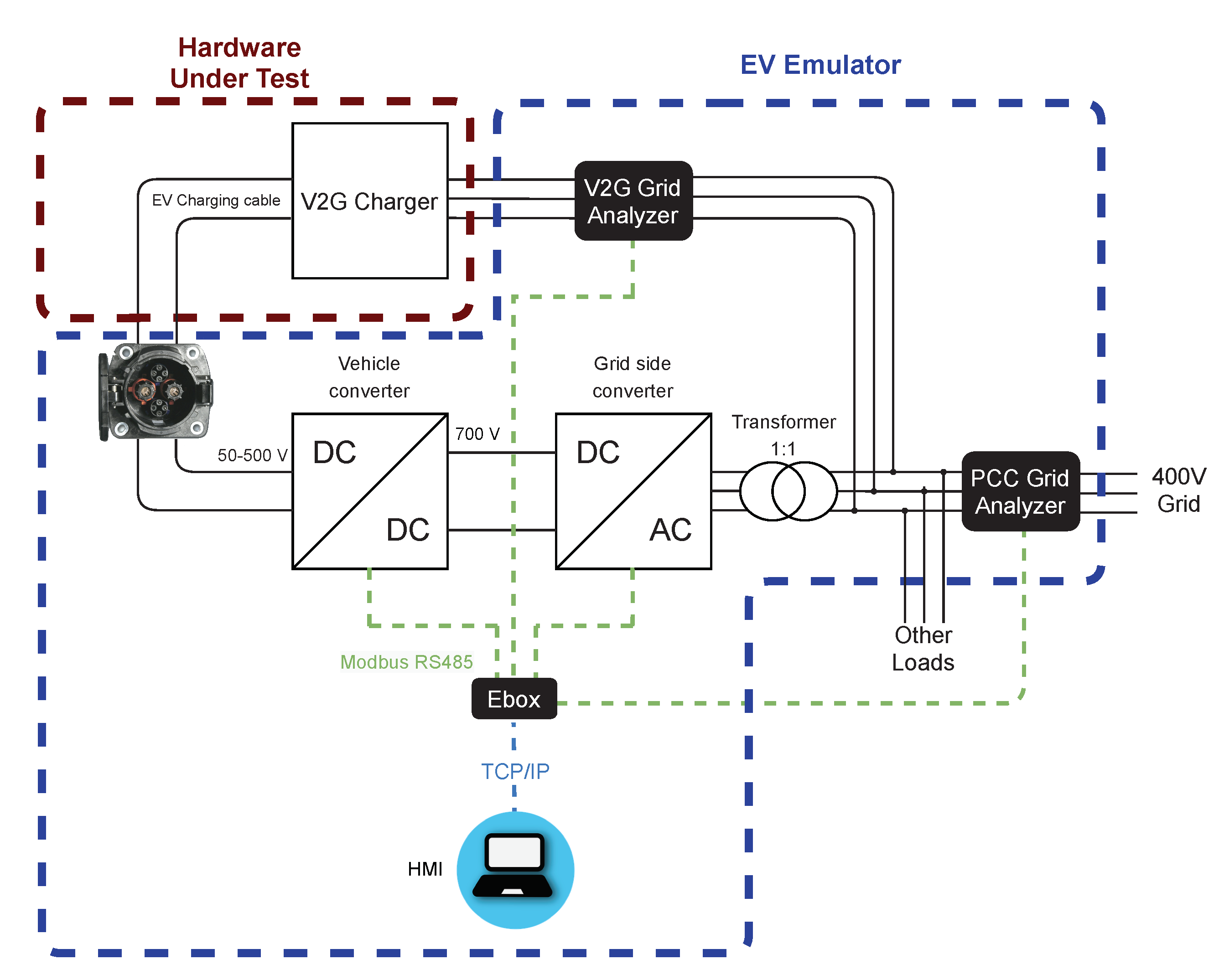
3.1. Overview
3.2. DC/DC Converter
3.2.1. Hardware Design
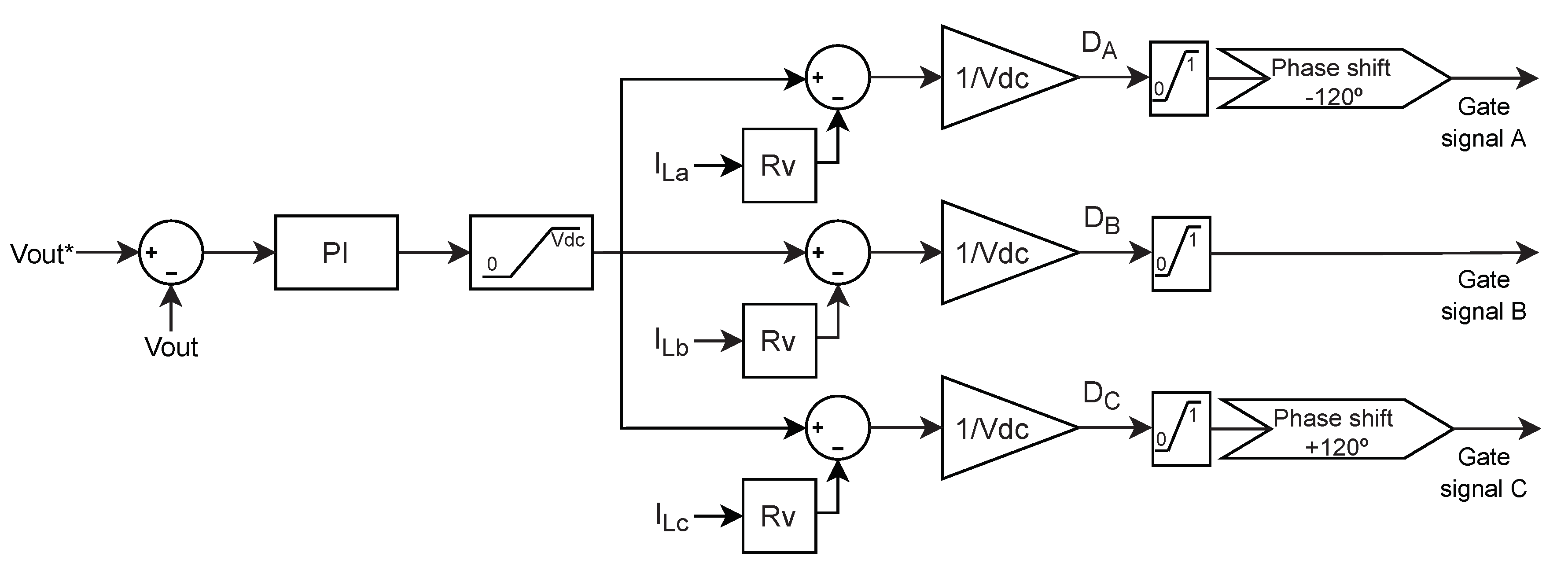
3.2.2. Control Design
3.3. AC/DC Converter
3.3.1. Hardware Design
3.3.2. Control Design
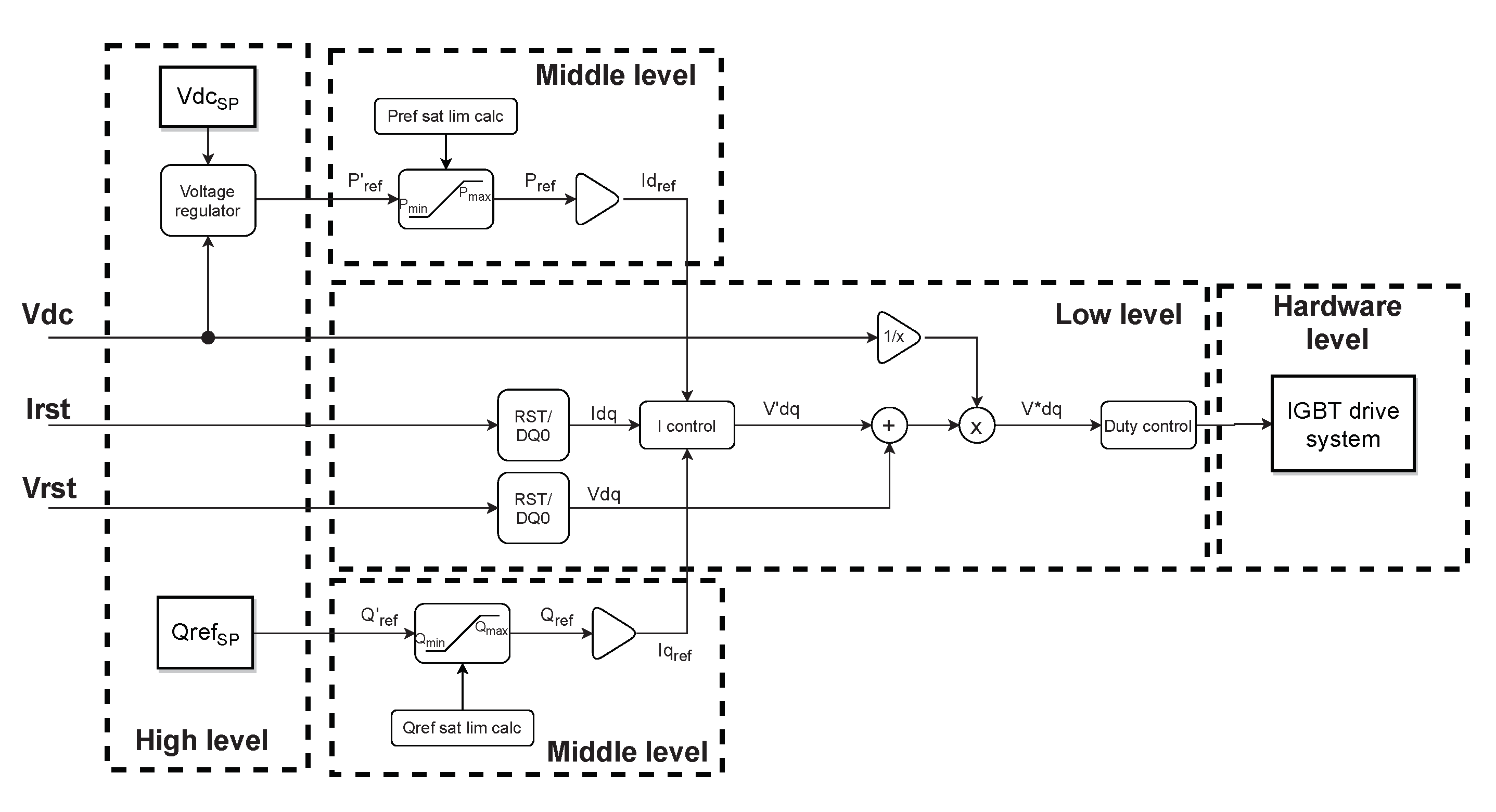
- High-level controller: the higher level control is in charge of generating the appropriate active and reactive power references provided to the low level layers of the controller. The purpose is to lead the system to the desired goal: on the one hand, to maintain the desired DC voltage level by regulating the active power output with the voltage regulator box; on the other hand, to adjust the system’s reactive power reference by means of providing the needed reactive power output.
- Middle-level controller: the middle-level controller is responsible for saturating the power references in order to guarantee that the system remains in its operation working range and does not exceed its limits. Therefore, safety features and operating constraints such as temperature and over-voltages are considered to evaluate whether the desired power objectives are reached or not. Finally, from the power references, the current references are set.
- Low-level controller: the low-level controller is divided into two parts: the current controller that determines the control actions needed to follow the control current references; and the duty control system, in charge of the converter’s modulation technique.
- Hardware-level controller: the hardware level controls the power converter’s drive system, translating the control signals to the physical pulses of the converter.
3.4. EBox
3.4.1. Hardware Design
3.4.2. Control Design
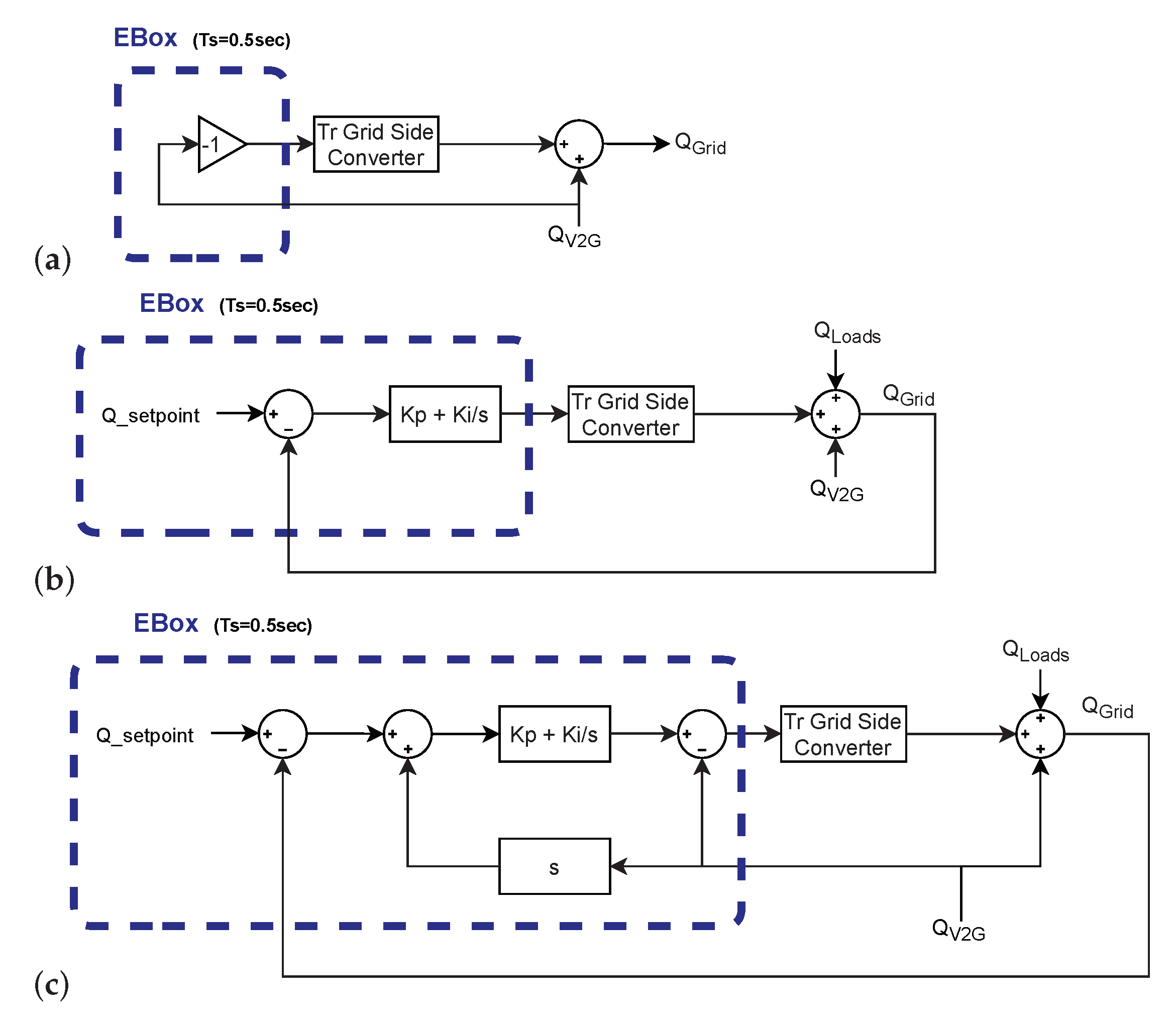
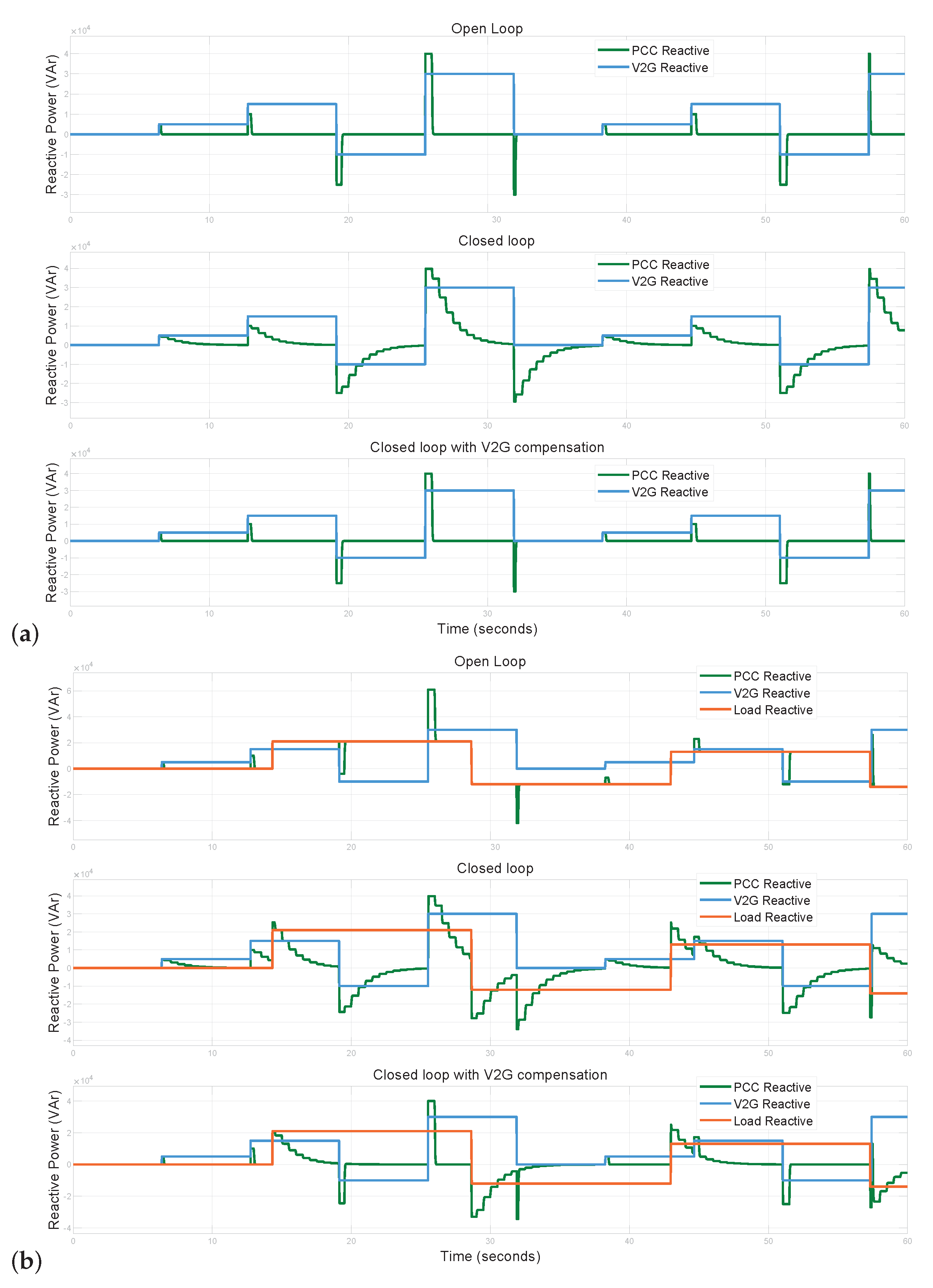
- V2G: in this case, the grid analyzer can only measure the power consumed or returned by V2G charger. The control algorithm implemented in this context is an open loop control, which is shown in Figure 10a. This control loop is easy to implement and has a very good time response. However, it is not possible to determine the reactive power at the PCC, and problems such as an incorrect calibration or installation of the EVE could even increase the power consumption in the facility.
- PCC: the grid analyzer is located at the point where the facility is connected to the grid. Figure 10b shows the control algorithm, which is a closed loop control with a PI regulator to ensure zero error in steady-state operation. The problem is that the time response of this control is minimum 5–10 times the time step, so loads with an abrupt change of power can be over the limits for a few seconds.
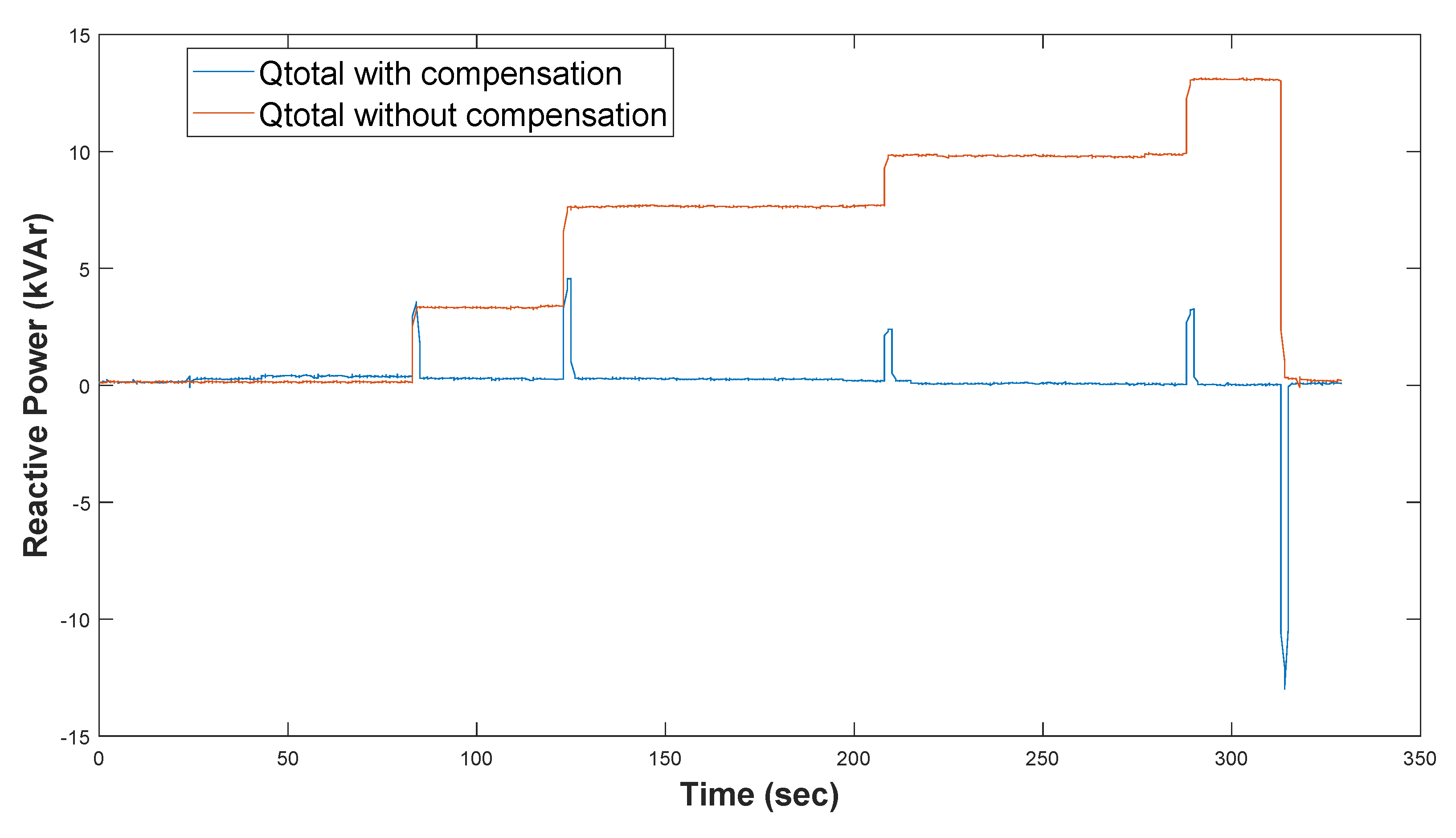
- V2G and PCC: the two grid analyzers are installed, one in the V2G charger and the other one in the PCC. The control algorithm is shown in Figure 10c, which is based on the previous closed loop control with a PI regulator. However, in this case, the reactive power of the charger is measured and directly compensated at the output of the regulator. In order to avoid the integration of the error produced by the charger, the derivative of this measure is compensated in the input of the regulator. In this way, the controller achieves a better time response capability. However, it has to be highlighted that the use of two grid analyzers increases close to 2% the final price of the solution.
4. Experimental Results
4.1. Test Description
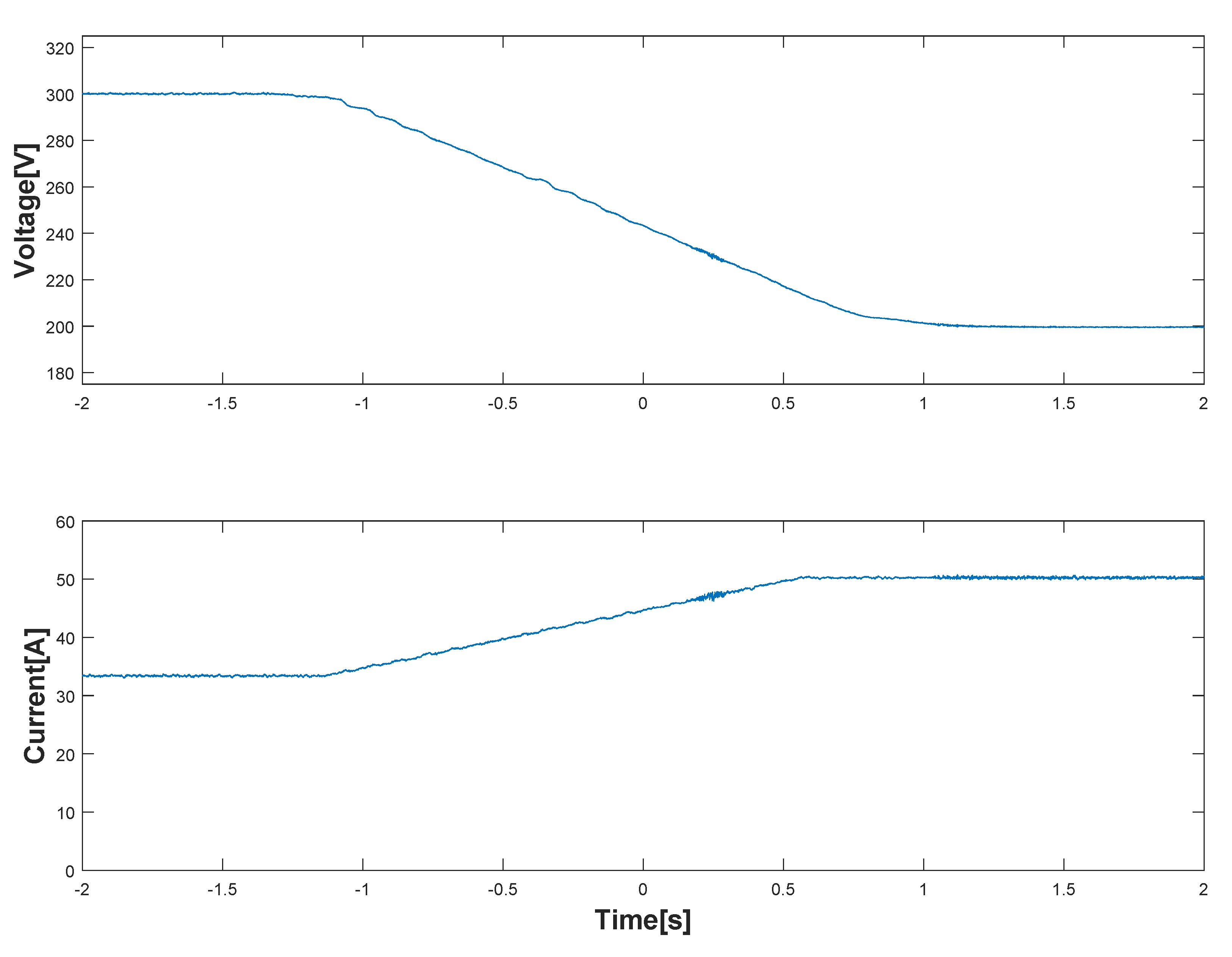
4.2. Manual Set-Point Adjustment
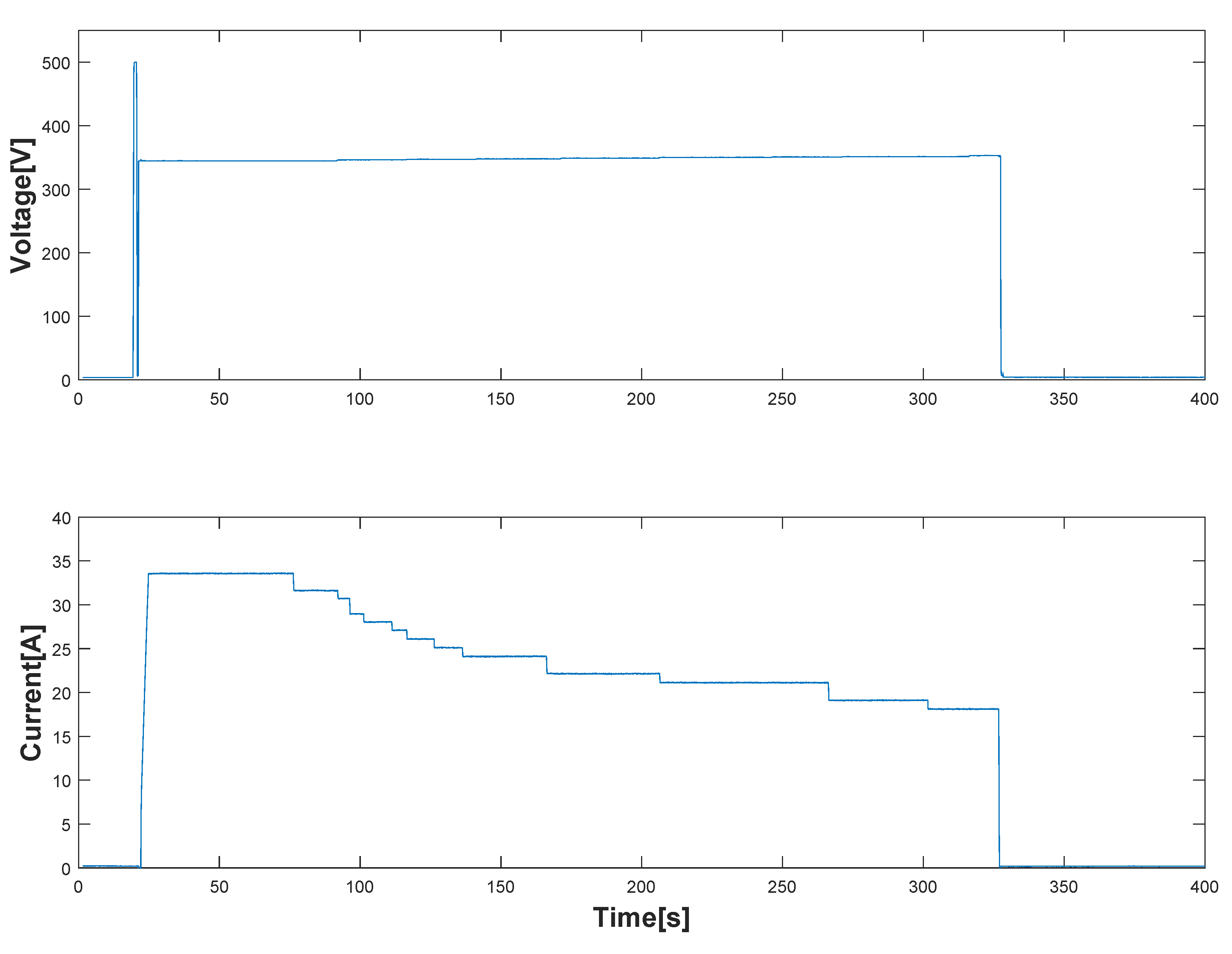
4.3. Load an EV Battery Profile
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Monti, A.; Ponci, F. Power Grids of the Future: Why Smart Means Complex. In Proceedings of the Complexity in Engineering (COMPENG ’10), Rome, Italy, 22–24 February 2010; pp. 7–11. [Google Scholar] [CrossRef]
- Vahedipour-Dahraie, M.; Rashidizaheh-Kermani, H.; Najafi, H.R.; Anvari-Moghaddam, A.; Guerrero, J.M. Coordination of EVs Participation for Load Frequency Control in Isolated Microgrids. Appl. Sci. 2017, 7, 539. [Google Scholar] [CrossRef] [Green Version]
- Habeeb, S.A.; Tostado-Véliz, M.; Hasanien, H.M.; Turky, R.A.; Meteab, W.K.; Jurado, F. DC Nanogrids for Integration of Demand Response and Electric Vehicle Charging Infrastructures: Appraisal, Optimal Scheduling and Analysis. Electronics 2021, 10, 2484. [Google Scholar] [CrossRef]
- IEA. Global EV Outlook 2021. Paris. 2021. Available online: https://www.iea.org/reports/global-ev-outlook-2021 (accessed on 14 October 2021).
- Jones, L.; Lucas-Healey, K.; Sturmberg, B.; Temby, H.; Islam, M. The A to Z of V2G: A Comprehensive Analysis of Vehicle-to-Grid Technology Worldwide. Realising Electric Vehicle to Grid Services Project. 2021. Available online: https://arena.gov.au/assets/2021/01/revs-the-a-to-z-of-v2g.pdf (accessed on 14 October 2021).
- Tostado-Véliz, M.; León-Japa, R.; Jurado, F. Optimal electrification of off-grid smart homes considering flexible demand and vehicle-to-home capabilities. Appl. Energy 2021, 298, 117184. [Google Scholar] [CrossRef]
- Odkhuu, N.; Lee, K.-B.; Ahmed, M.A.; Kim, Y.-C. Optimal Energy Management of V2B with RES and ESS for Peak Load Minimization. Appl. Sci. 2018, 8, 2125. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.; Zhang, Y.; Li, X.; Sun, B.; Liao, Q.; Tao, Y.; Wang, Z. Strategic integration of vehicle-to-home system with home distributed photovoltaic power generation in Shanghai. Appl. Energy 2018, 263, 114603. [Google Scholar] [CrossRef]
- Strasser, T.; Pröstl Andrén, F.; Lauss, G.; Bründlinger, R.; Brunner, H.; Moyo, C.; Seitl, C.; Rohjans, S.; Lehnhoff, S.; Palensky, P.; et al. Towards holistic power distribution system validation and testing—An overview and discussion of different possibilities. E I Elektrotechnik Inf. 2017, 134, 71–77. [Google Scholar] [CrossRef] [Green Version]
- Mylonas, E.; Tzanis, N.; Birbas, M.; Birbas, A. An Automatic Design Framework for Real-Time Power System Simulators Supporting Smart Grid Applications. Electronics 2020, 9, 299. [Google Scholar] [CrossRef] [Green Version]
- García-Martínez, E.; Sanz, J.F.; Muñoz-Cruzado, J.; Perié, J.M. A Review of PHIL Testing for Smart Grids—Selection Guide, Classification and Online Database Analysis. Electronics 2020, 9, 382. [Google Scholar] [CrossRef] [Green Version]
- Oettmeier, M.; Bartelt, R.; Heising, C.; Staudt, V.; Steimel, A.; Tietmeyer, S.; Bock, B.; Doerlemann, C. Machine emulator: Power-electronics based test equipment for testing high-power drive converters. In Proceedings of the 2010 International Conference on Optimization of Electrical and Electronic Equipment, Brasov, Romania, 20–22 May 2010; pp. 582–588. [Google Scholar] [CrossRef]
- Anil, D.; Sivraj, P. Electric Vehicle Charging Communication Test-bed following CHAdeMO. In Proceedings of the 2020 International Conference on Computing, Communication and Networking Technologies (ICCCNT), Kharagpur, India, 1–3 July 2020; pp. 1–7. [Google Scholar] [CrossRef]
- Jayawardana, I.; Ho, C.N.M.; Zhang, Y. A Comprehensive Study and Validation of a Power-HIL Testbed for Evaluating Grid-Connected EV Chargers. IEEE J. Emerg. Sel. Top. Power Electron. 2021. [Google Scholar] [CrossRef]
- De Herdt, L.; Shekhar, A.; Yu, Y.; Mouli, G.R.C.; Dong, J.; Bauer, P. Power Hardware-in-the-Loop Demonstrator for Electric Vehicle Charging in Distribution Grids. In Proceedings of the 2021 IEEE Transportation Electrification Conference & Expo (ITEC), Chicago, IL, USA, 21–25 June 2021; pp. 679–683. [Google Scholar] [CrossRef]
- Cabeza, T.; Sanz, J.F.; Calavia, M.; Acerete, R.; Cascante, S. Fast charging emulation system for electric vehicles. In Proceedings of the 2013 World Electric Vehicle Symposium and Exhibition (EVS27), Barcelona, Spain, 17–20 November 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Ledinger, S.; Reihs, D.; Stahleder, D.; Lehfuss, F. Test Device for Electric Vehicle Grid Integration. In Proceedings of the 2018 IEEE International Conference on Environment and Electrical Engineering and 2018 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Palermo, Italy, 12–15 June 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Popov, A.; Tybel, M.; Schugt, M. Power hardware-in-the-loop test bench for tests and verification of EV and EVSE charging systems. In Proceedings of the 2014 IEEE International Electric Vehicle Conference (IEVC), Florence, Italy, 17–19 December 2014; pp. 1–8. [Google Scholar] [CrossRef]
- CHAdeMO. Available online: https://www.chademo.com (accessed on 14 October 2021).
- Wang, L.; Qin, Z.; Slangen, T.; Bauer, P.; van Wijk, T. Grid Impact of Electric Vehicle Fast Charging Stations: Trends, Standards, Issues and Mitigation Measures—An Overview. IEEE Open J. Power Electron. 2021, 2, 56–74. [Google Scholar] [CrossRef]
- Krasselt, P.; Boßle, J.; Suriyah, M.R.; Leibfried, T. DC-Electric Vehicle Supply Equipment Operation Strategies for Enhanced Utility Grid Voltage Stability. World Electr. Veh. J. 2015, 7, 530–539. [Google Scholar] [CrossRef] [Green Version]
- Andolšek, A.; Nemček, M.P.; Gómez, A.; Zocchi, A.; Bruna, J.; Oliván, M.A. Flexibility and optimization services validation in a microgrid. In Proceedings of the 2018 CIRED Ljubljana Workshop, Ljubljana, Slovenia, 7–8 June 2018. [Google Scholar] [CrossRef]
- Azani, H.; Massoud, A.; Benbrahim, L.; Williams, B.W.; Holiday, D. An LCL filter-based grid-interfaced three-phase voltage source inverter: Performance evaluation and stability analysis. In Proceedings of the 2014 IET International Conference on Power Electronics, Machines and Drives (PEMD 2014), Manchester, UK, 8–10 April 2014. [Google Scholar] [CrossRef]
- Muñoz-Cruzado, J.; Villegas-Núñez, J.; Vite-Frías, J.A.; Carrasco-Solís, J.M.; Galván-Díez, E. New Low-Distortion Q–f Droop Plus Correlation Anti-Islanding Detection Method for Power Converters in Distributed Generation Systems. IEEE Trans. Ind. Electron. 2015, 62, 5072–5081. [Google Scholar] [CrossRef]
- Muñoz-Cruzado-Alba, J.; Villegas-Núñez, J.; Vite-Frías, J.A.; Carrasco Solís, J.M. A New Fast Peak Current Controller for Transient Voltage Faults for Power Converters. Energies 2016, 9, 1. [Google Scholar] [CrossRef] [Green Version]
- Martinenas, S.; Marinelli, M.; Andersen, P.B.; Træholt, C. Implementation and demonstration of grid frequency support by V2G enabled electric vehicle. In Proceedings of the 2014 49th International Universities Power Engineering Conference (UPEC), Cluj-Napoca, Romania, 2–5 September 2014. [Google Scholar] [CrossRef] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Standard | CHAdeMO | GB/T | CCS Type 1 | CCS Type 2 | Tesla | ChaoJi |
|---|---|---|---|---|---|---|
| Maximum Voltage (V) | 1000 | 750 | 600 | 900 | 500 | 1500 |
| Maximum Current (A) | 400 | 250 | 400 | 400 | 631 | 600 |
| Maximum Power (kW) | 400 | 185 | 200 | 350 | 250 | 900 |
| Communication Protocol | CAN | CAN | PLC | PLC | CAN | CAN |
| V2X Function | Yes | No | No | No | Unknown | Yes |
| Start year | 2009 | 2013 | 2014 | 2013 | 2012 | 2020 |
| EV Emulator | |
|---|---|
| Nominal Power | 50 kW |
| Efficiency | >96% |
| Internal DC-link voltage | 700 V |
| Switching frequency | 20 kHz |
| Control frequency | 20 kHz |
| Input | |
| Nominal RMS phase voltage | 230 V |
| Nominal RMS phase current | 80 A |
| I ripple | 1% Inom |
| Nominal frequency | 50 Hz |
| Output | |
| Output voltage range | 50–500 V |
| Output current range | −100 A to 100 A |
| Maximum voltage ripple | <2% Vmax |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
García-Martínez, E.; Muñoz-Cruzado-Alba, J.; Sanz-Osorio, J.F.; Perié, J.M. Design and Experimental Validation of Power Electric Vehicle Emulator for Testing Electric Vehicle Supply Equipment (EVSE) with Vehicle-to-Grid (V2G) Capability. Appl. Sci. 2021, 11, 11496. https://doi.org/10.3390/app112311496
García-Martínez E, Muñoz-Cruzado-Alba J, Sanz-Osorio JF, Perié JM. Design and Experimental Validation of Power Electric Vehicle Emulator for Testing Electric Vehicle Supply Equipment (EVSE) with Vehicle-to-Grid (V2G) Capability. Applied Sciences. 2021; 11(23):11496. https://doi.org/10.3390/app112311496
Chicago/Turabian StyleGarcía-Martínez, Eduardo, Jesús Muñoz-Cruzado-Alba, José F. Sanz-Osorio, and Juan Manuel Perié. 2021. "Design and Experimental Validation of Power Electric Vehicle Emulator for Testing Electric Vehicle Supply Equipment (EVSE) with Vehicle-to-Grid (V2G) Capability" Applied Sciences 11, no. 23: 11496. https://doi.org/10.3390/app112311496
APA StyleGarcía-Martínez, E., Muñoz-Cruzado-Alba, J., Sanz-Osorio, J. F., & Perié, J. M. (2021). Design and Experimental Validation of Power Electric Vehicle Emulator for Testing Electric Vehicle Supply Equipment (EVSE) with Vehicle-to-Grid (V2G) Capability. Applied Sciences, 11(23), 11496. https://doi.org/10.3390/app112311496