
Influence of the Lubrication Oil Temperature on the Disengaging Dynamic Characteristics of a Cu-Based Wet Multi-Disc Clutch




Abstract
:1. Introduction
2. Numerical Model
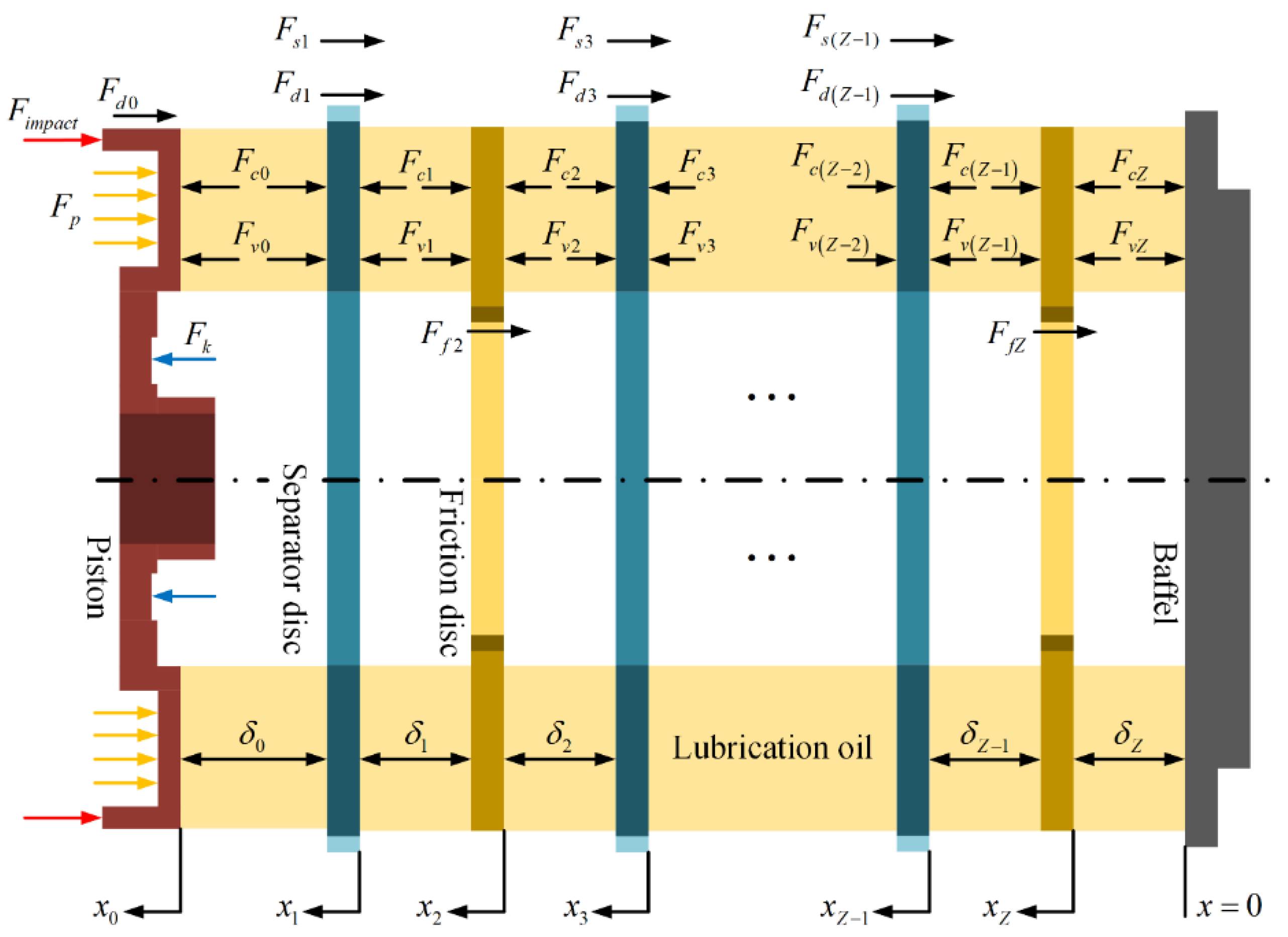
2.1. Axial Kinetic Model
2.2. Lubrication Model
2.3. Contact Model
2.4. Sliding Model
2.5. Thermal Model
2.6. Spline Resistance Model
2.7. Piston Impact Model
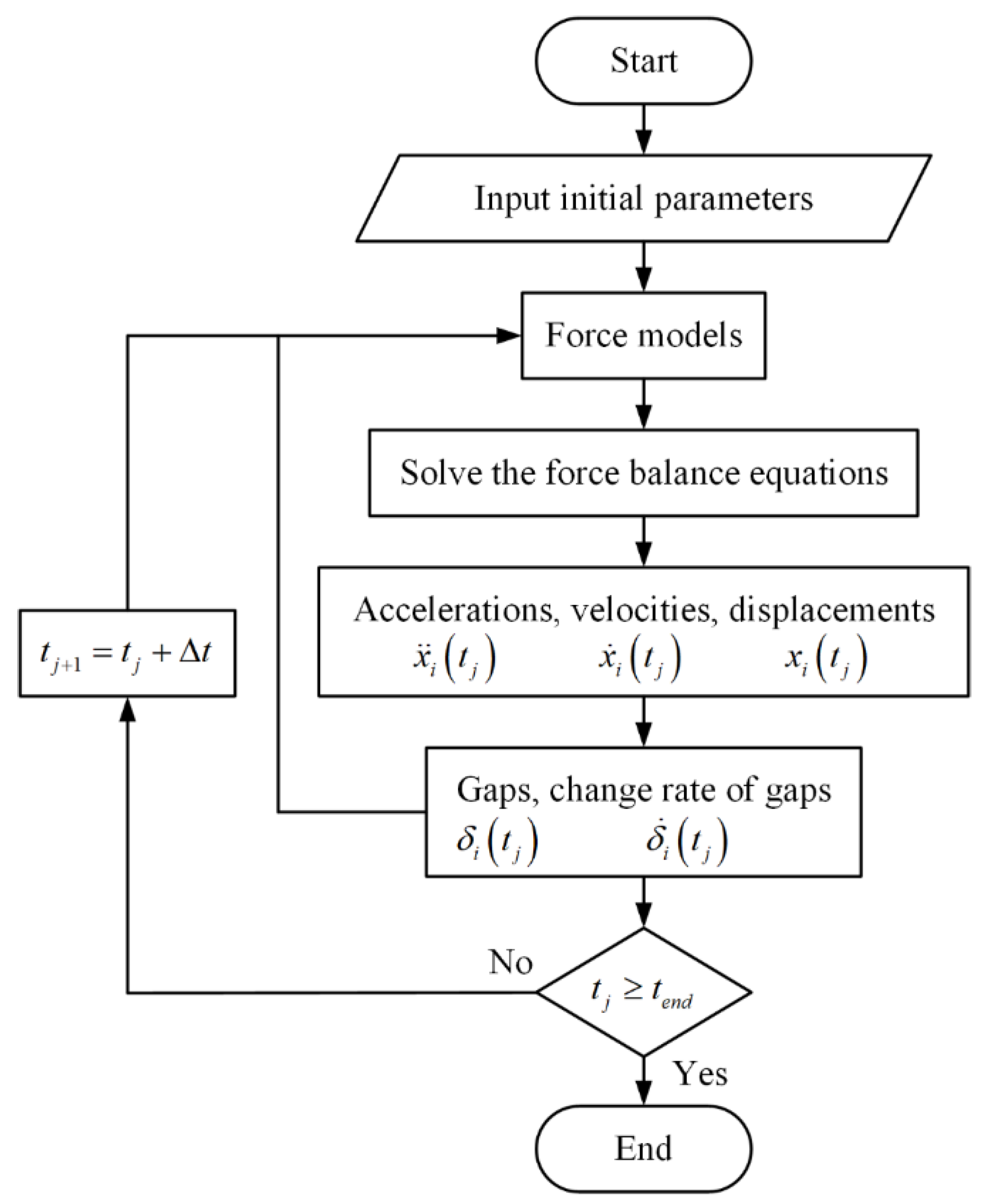
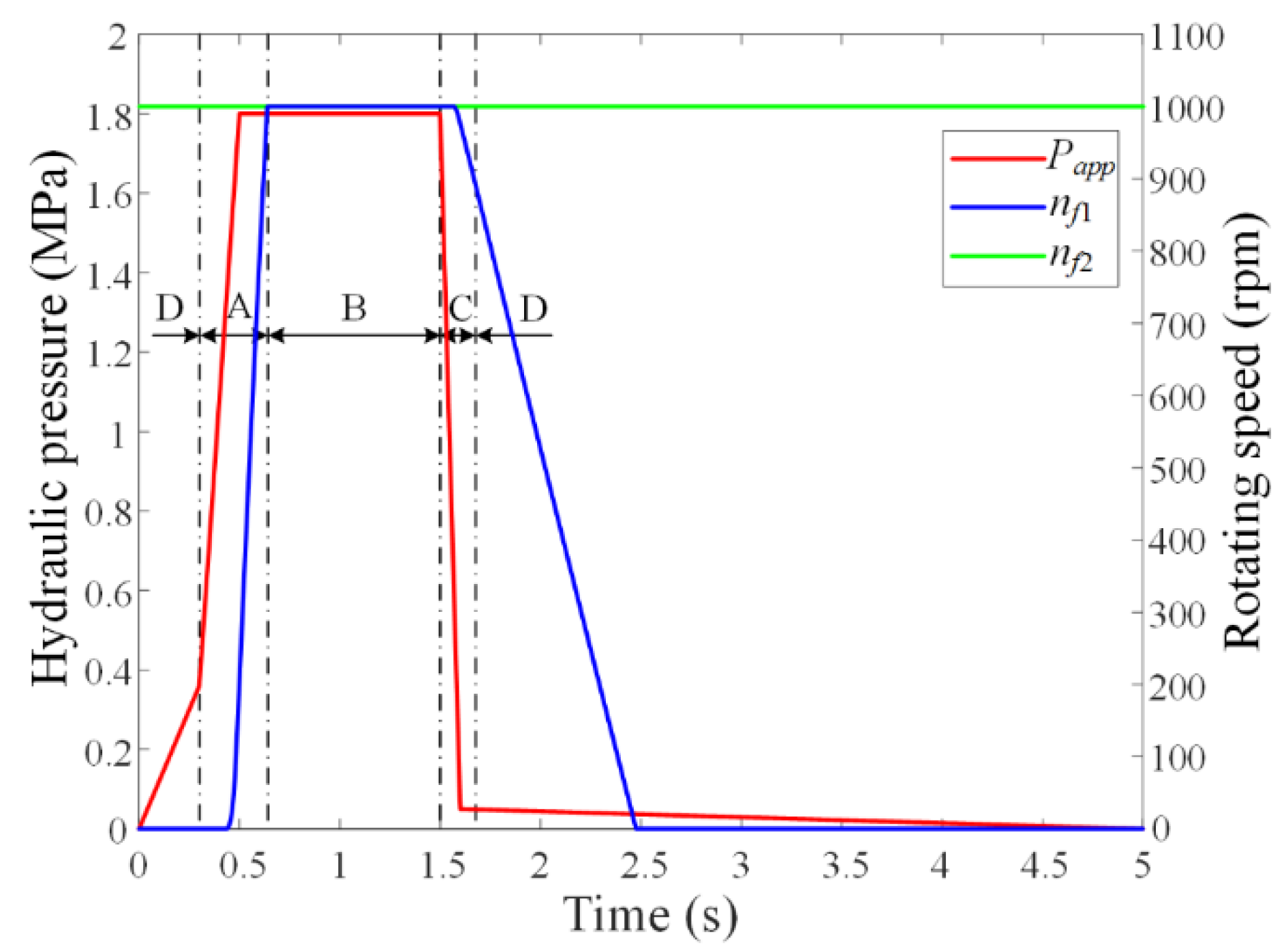
3. Numerical Simulation
4. Results and Discussion
4.1. Disengaging Duration
4.2. Disengaging Uniformity
4.3. Lubrication Status
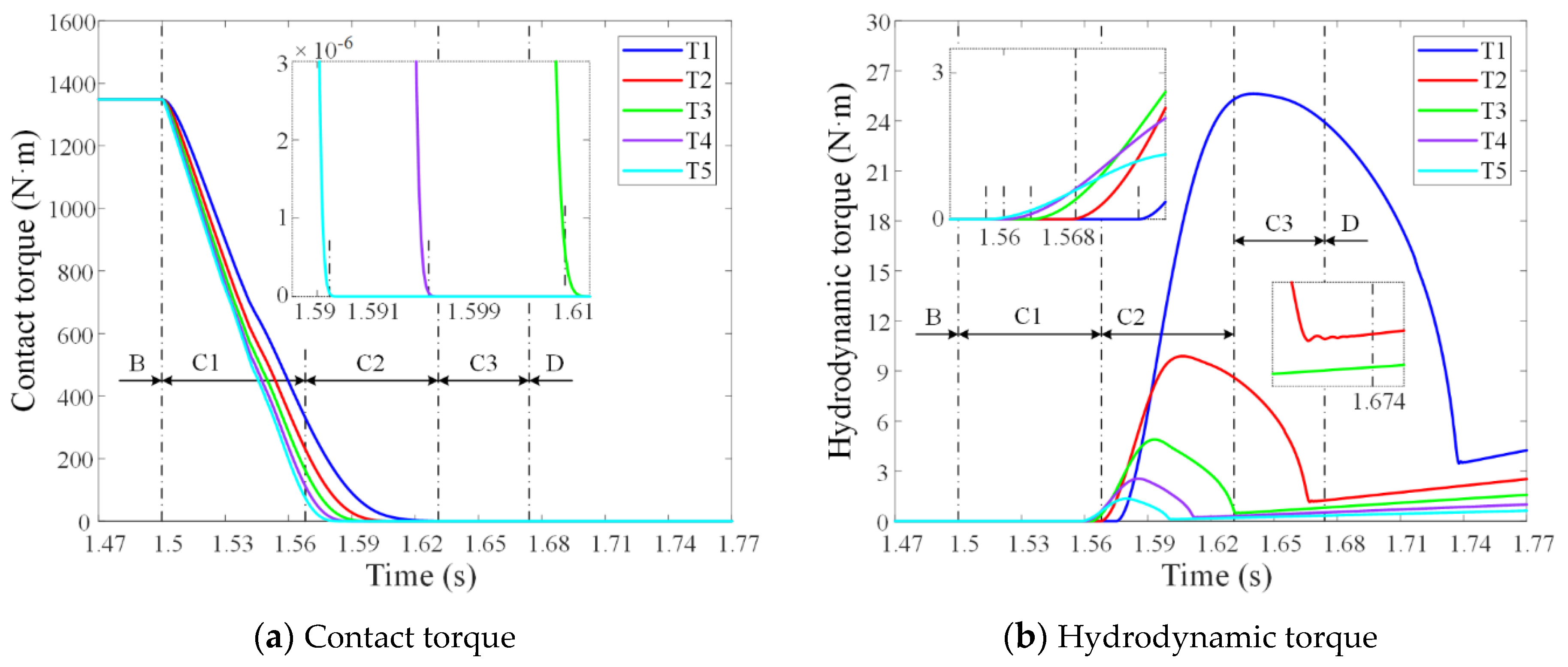
4.4. Friction Torque
5. Conclusions
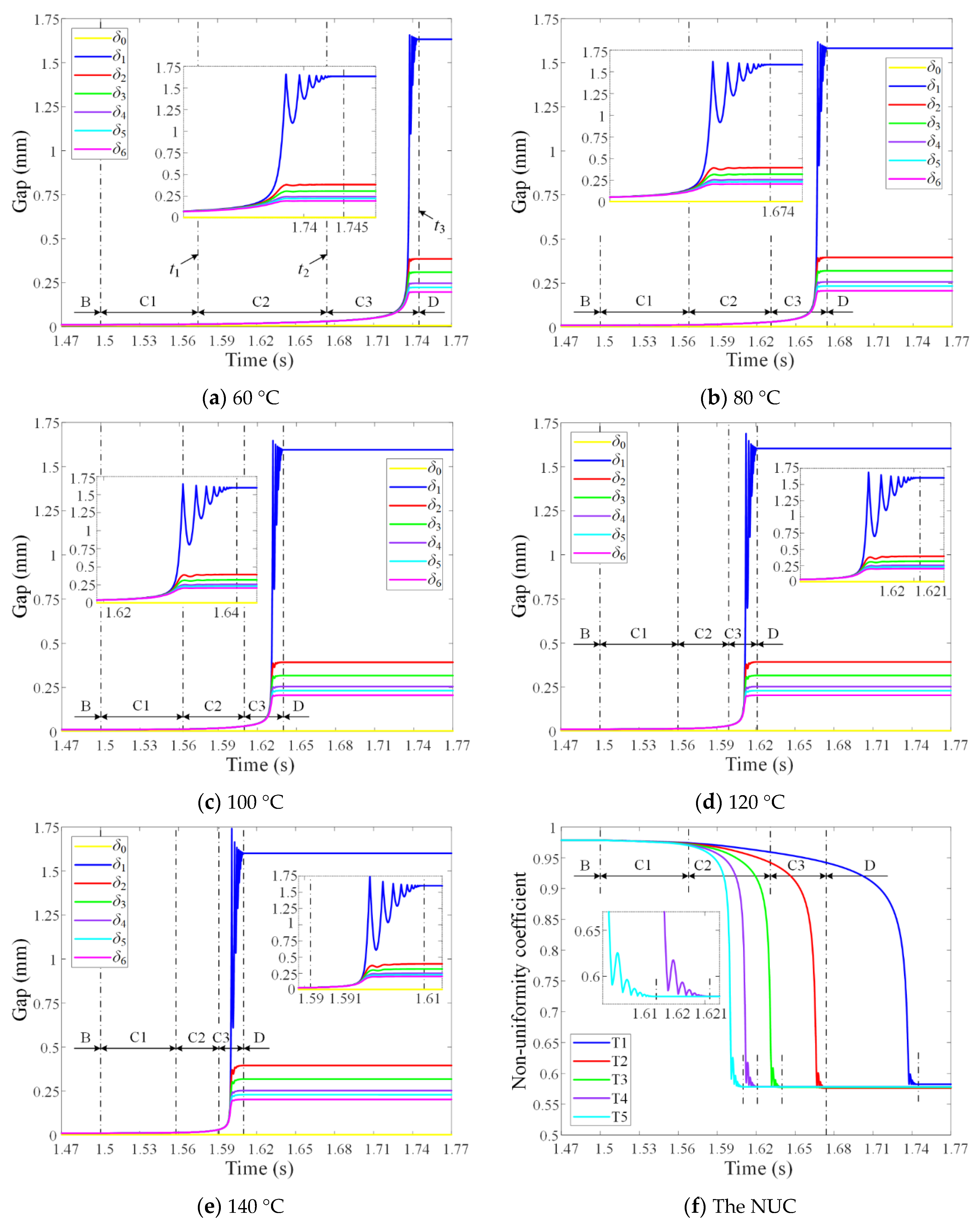
- The friction pair gaps first increased slowly, then increased rapidly, finally stabilized after fluctuation during the disengaging process. When the first friction pair gap stabilized, the disengaging process was completed. The increase of ATF temperature (from 60 °C to 140 °C) significantly shortened the disengaging duration (shortened by 55.1% from 0.245 s to 0.11 s), but its influence became weaker and weaker.
- The disengaged friction pair gaps decreased from the first friction pair to the sixth friction pair in sequence. With the increase of ATF temperature, the NUC first decreased then increased slightly, indicating that the disengaging uniformity first increased then decreased slightly. The disengaged friction pair gaps were distributed most uniformly when the ATF temperature was 80 °C.
- The disengaging process of a wet multi-disc clutch included the boundary, mixed, and hydrodynamic lubrication stages in sequence. The increase of ATF temperature accelerated the change of lubrication status between friction pairs, shortened the duration of the boundary lubrication stage slightly, and lessened the duration of the mixed and hydrodynamic lubrication stages significantly in the disengaging process.
- The contact torque decreased in the disengaging process, and the increase of ATF temperature significantly promoted its decrease (promoted by 91.2%). The hydrodynamic torque first increased sharply, then decreased significantly, and finally increased slowly after fluctuation during the disengaging process, and was dramatically reduced by the increase of ATF temperature (reduced by 94.7%).
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| ATF | lubrication oil | inner radius of friction pair (m) | |
| CFD | computational fluid dynamics | outer radius of friction pair (m) | |
| NUC | non-uniformity coefficient | temperature (°C) | |
| non-groove area ratio | linear velocity difference (m/s) | ||
| damping coefficient (N·s/m) | displacement (m) | ||
| thickness of friction material (m) | velocity (m/s) | ||
| recovery coefficient | acceleration (m/s2) | ||
| Young’s modulus (Pa) | number of friction pairs | ||
| nominal oil film thickness (m) | asperity radius (m) | ||
| film thickness ratio | gap (m) | ||
| thickness of friction disc (m) | angular speed difference (rad/s) | ||
| thickness of separator disc (m) | local relative indentation (m) | ||
| inertia of driven end (kg·m2) | initial indentation velocity (m/s) | ||
| stiffness of impact (N/m) | dynamic viscosity (Pa·s) | ||
| contact coefficient | coefficient of friction | ||
| weight of piston (kg) | spline friction coefficient | ||
| weight of separator disc (kg) | roughness (m) | ||
| weight of friction disc (kg) | pressure flow factor | ||
| resistance torque (N·m) | shear stress factors | ||
| impact coefficient | permeability (m2) | ||
| asperity density (/m2) | plastic deformation coefficient | ||
| applied pressure (Pa) | density (kg/m3) |
References
- Li, M.; Khonsari, M.M.; McCarthy, D.M.C.; Lundin, J. Parametric analysis for a paper-based wet clutch with groove consideration. Tribol. Int. 2014, 80, 222–233. [Google Scholar] [CrossRef]
- Bao, H.; Huang, W.; Lu, F. Investigation of engagement characteristics of a multi-disc wet friction clutch. Tribol. Int. 2021, 159, 106940. [Google Scholar] [CrossRef]
- Leister, R.; Najafi, A.F.; Gatti, D.; Kriegseis, J.; Frohnapfel, B. Non-dimensional characteristics of open wet clutches for advanced drag torque and aeration predictions. Tribol. Int. 2020, 152, 106442. [Google Scholar] [CrossRef]
- Yu, L.; Ma, B.; Chen, M.; Li, H.; Liu, J.; Zheng, L. Numerical and experimental studies on the characteristics of friction torque based on wet paper-based clutches. Tribol. Int. 2019, 131, 541–553. [Google Scholar] [CrossRef]
- Yu, L.; Ma, B.; Chen, M.; Xue, J.; Zhao, P. Variation mechanism of the friction torque in a Cu-based wet clutch affected by operating parameters. Tribol. Int. 2020, 147, 106169. [Google Scholar] [CrossRef]
- Wu, B.; Qin, D.; Hu, J.; Wang, X.; Wang, Y.; Lv, H. Analysis of influencing factors and changing laws on friction behavior of wet clutch. Tribol. Int. 2021, 162, 107125. [Google Scholar] [CrossRef]
- Wu, B.; Qin, D.; Hu, J.; Liu, Y. Experimental data mining research on factors influencing friction coefficient of wet clutch. J. Tribol. 2021, 143, 121802. [Google Scholar] [CrossRef]
- Wang, Y.; Li, Y.; Liu, Y.; Zhang, W. Modeling and experimental research on engaging characteristics of wet clutch. Ind. Lubr. Tribol. 2019, 71, 94–101. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, K.; Wu, X. Structural design and friction performance test of a new conical groove friction disks in wet clutch. Appl. Sci. 2021, 11, 7231. [Google Scholar] [CrossRef]
- Yu, L.; Ma, B.; Chen, M.; Li, H.Y.; Liu, J. Experimental study on the friction stability of paper-based clutches concerning groove patterns. Ind. Lubr. Tribol. 2020, 72, 541–548. [Google Scholar] [CrossRef]
- Bao, H.; Zhang, C.; Hou, X.; Lu, F. Wear characteristics of different groove-shaped friction pairs of a friction clutch. Appl. Sci. 2021, 11, 284. [Google Scholar] [CrossRef]
- Marklund, P.; Mäki, R.; Larsson, R.; Höglund, E.; Khonsari, M.M.; Jang, J. Thermal influence on torque transfer of wet clutches in limited slip differential applications. Tribol. Int. 2007, 40, 876–884. [Google Scholar] [CrossRef]
- Meng, Q.; Tian, Z.; Zhao, C. Non-uniform contact characteristics of the friction disc during the initial period of a braking process. J. Mech. Sci. Technol. 2018, 32, 1261–1268. [Google Scholar] [CrossRef]
- Bao, H.; Kong, W.; Hou, X.; Zhu, R. Analysis on temperature field of friction pair of aviation friction clutch based on different groove shapes of friction disk. J. Mech. Sci. Technol. 2021, 35, 3735–3742. [Google Scholar] [CrossRef]
- Zhao, E.H.; Ma, B.; Li, H.Y. Wear and lubrication behaviors of Cu-based friction pairs with asperity contacts: Numerical and experimental studies. Tribol. Lett. 2017, 65, 69. [Google Scholar] [CrossRef]
- Ma, B.; Yu, L.; Chen, M.; Li, H.Y.; Zheng, L.J. Numerical and experimental studies on the thermal characteristics of the clutch hydraulic system with provision for oil flow. Ind. Lubr. Tribol. 2019, 71, 733–740. [Google Scholar] [CrossRef]
- Wu, P.; Zhou, X.; Yang, C.; Lv, H.; Lin, T.; Wu, X. Parametric analysis of the drag torque model of wet multi-plate friction clutch with groove consideration. Ind. Lubr. Tribol. 2018, 70, 1268–1281. [Google Scholar] [CrossRef]
- Iqbal, S.; Al-Bender, F.; Pluymers, B.; Desmet, W. Model for predicting drag torque in open multi-disks wet clutches. ASME J. Fluid Eng. 2014, 136, 021103. [Google Scholar] [CrossRef]
- Hu, J.; Hou, S.; Wei, C. Drag torque modeling at high circumferential speed in open wet clutches considering plate wobble and mechanical contact. Tribol. Int. 2018, 124, 102–116. [Google Scholar] [CrossRef]
- Neupert, T.; Bartel, D. High-resolution 3D CFD multiphase simulation of the flow and the drag torque of wet clutch discs considering free surfaces. Tribol. Int. 2019, 129, 283–296. [Google Scholar] [CrossRef]
- Neupert, T.; Bartel, D. Measurement of pressure distribution and hydrodynamic axial forces of wet clutch discs. Tribol. Int. 2021, 163, 107172. [Google Scholar] [CrossRef]
- Cui, J.; Hou, P.; Zhang, B.; Zhao, X. Investigation of flow between deformed disks in hydro-viscous drive. Tribol. Int. 2018, 121, 287–301. [Google Scholar] [CrossRef]
- Cui, J.; Xie, F.; Li, H.; Zhao, X. Influences of deformed film gaps on dynamic torque behavior of hydroviscous drive. Tribol. Trans. 2021, 64, 477–500. [Google Scholar] [CrossRef]
- Wang, P.; Katopodes, N.; Fujii, Y. Statistical modeling of plate clearance distribution for wet clutch drag analysis. SAE Int. J. Passeng. Cars-Mech. Syst. 2018, 11, 76–88. [Google Scholar] [CrossRef]
- Fu, Y.; Liu, Y.; Cui, L.; Xu, X. Dynamic analysis and control strategy of wet clutches during torque phase of gear shift. J. Mech. Sci. Technol. 2016, 30, 1479–1496. [Google Scholar] [CrossRef]
- Patir, N.; Cheng, H.S. Application of average flow model lubrication between rough sliding surfaces. J. Lubr. Technol. 1979, 101, 220–229. [Google Scholar] [CrossRef]
- Berger, E.J.; Sadeghi, F.; Krousgrill, C.M. Analytical and numerical modeling of engagement of rough, permeable, grooved wet clutches. J. Tribol. 1997, 119, 143–148. [Google Scholar] [CrossRef]
- Zhao, E.H.; Ma, B.; Li, H.Y. Numerical and experimental studies on tribological behaviors of Cu-based friction pairs from hydrodynamic to boundary lubrication. Tribol. Trans. 2018, 61, 347–356. [Google Scholar] [CrossRef]
- Houpert, L. New results of traction force calculations in elastohydrodynamic contacts. J. Tribol. 1985, 107, 241–245. [Google Scholar] [CrossRef]
- Yu, L.; Ma, B.; Chen, M.; Li, H.; Zhang, H.; Liu, J. Thermodynamic differences of different friction pairs in a multidisc clutch caused by spline friction: Numerical simulation and experimental verification. Tribol. Trans. 2019, 62, 724–736. [Google Scholar] [CrossRef]
- Chen, M.; Zhang, B.; Feng, Y.; Wang, L.; Wang, H. Numerical and experimental studies of the attenuation characteristics of friction torque in a wet multidisc clutch. Appl. Sci. 2021, 11, 814. [Google Scholar] [CrossRef]
- Lankarani, H.M.; Nikravesh, P.E. A contact force model with hysteresis damping for impact analysis of multibody systems. J. Mech. Des. 1990, 112, 369–376. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value | Parameter | Value |
|---|---|---|---|---|---|
| 0.68 | /(kg) | 3 | /(m) | 8 × 10−4 | |
| /(N·s/m) | 0.0714 | /(kg) | 0.45 | 0.1 | |
| /(m) | 6 × 10−4 | /(kg) | 0.6 | /(m) | 8.4 × 10−6 |
| /(Pa) | 4.84 × 109 | /(N·m) | 240 | /(m2) | 2 × 10−12 |
| /(m) | 2 × 10−3 | /(m−2) | 7 × 107 | 1.2332 | |
| /(m) | 3.2 × 10−3 | /(m) | 0.086 | /(kg/m3) | 875 |
| /(kg·m2) | 2 | /(m) | 0.124 |
| Number | T1 | T2 | T3 | T4 | T5 |
|---|---|---|---|---|---|
| T/(°C) | 60 | 80 | 100 | 120 | 140 |
| δ1/(mm) | 1.6330 | 1.5822 | 1.5950 | 1.6034 | 1.6006 |
| δ2/(mm) | 0.3852 | 0.3962 | 0.3926 | 0.3926 | 0.3956 |
| δ3/(mm) | 0.3094 | 0.3200 | 0.3173 | 0.3162 | 0.3179 |
| δ4/(mm) | 0.2467 | 0.2572 | 0.2548 | 0.2527 | 0.2526 |
| δ5/(mm) | 0.2237 | 0.2338 | 0.2321 | 0.2298 | 0.2293 |
| δ6/(mm) | 0.1968 | 0.2069 | 0.2057 | 0.2035 | 0.2025 |
| NUC | 0.5825 | 0.5761 | 0.5774 | 0.5784 | 0.5782 |
| t1/(s) | 1.575 | 1.568 | 1.563 | 1.560 | 1.558 |
| t2/(s) | 1.674 | 1.631 | 1.610 | 1.599 | 1.591 |
| t3/(s) | 1.745 | 1.674 | 1.640 | 1.621 | 1.610 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, L.; Ma, B.; Chen, M.; Yu, L.; Wang, Q. Influence of the Lubrication Oil Temperature on the Disengaging Dynamic Characteristics of a Cu-Based Wet Multi-Disc Clutch. Appl. Sci. 2021, 11, 11299. https://doi.org/10.3390/app112311299
Zheng L, Ma B, Chen M, Yu L, Wang Q. Influence of the Lubrication Oil Temperature on the Disengaging Dynamic Characteristics of a Cu-Based Wet Multi-Disc Clutch. Applied Sciences. 2021; 11(23):11299. https://doi.org/10.3390/app112311299
Chicago/Turabian StyleZheng, Liangjie, Biao Ma, Man Chen, Liang Yu, and Qian Wang. 2021. "Influence of the Lubrication Oil Temperature on the Disengaging Dynamic Characteristics of a Cu-Based Wet Multi-Disc Clutch" Applied Sciences 11, no. 23: 11299. https://doi.org/10.3390/app112311299
APA StyleZheng, L., Ma, B., Chen, M., Yu, L., & Wang, Q. (2021). Influence of the Lubrication Oil Temperature on the Disengaging Dynamic Characteristics of a Cu-Based Wet Multi-Disc Clutch. Applied Sciences, 11(23), 11299. https://doi.org/10.3390/app112311299