
Space-Constrained Scheduling Optimization Method for Minimizing the Effects of Stacking of Trades


Abstract
:1. Introduction
2. Current State of Space-Constrained Scheduling
3. Space-Constrained Scheduling Optimization Method
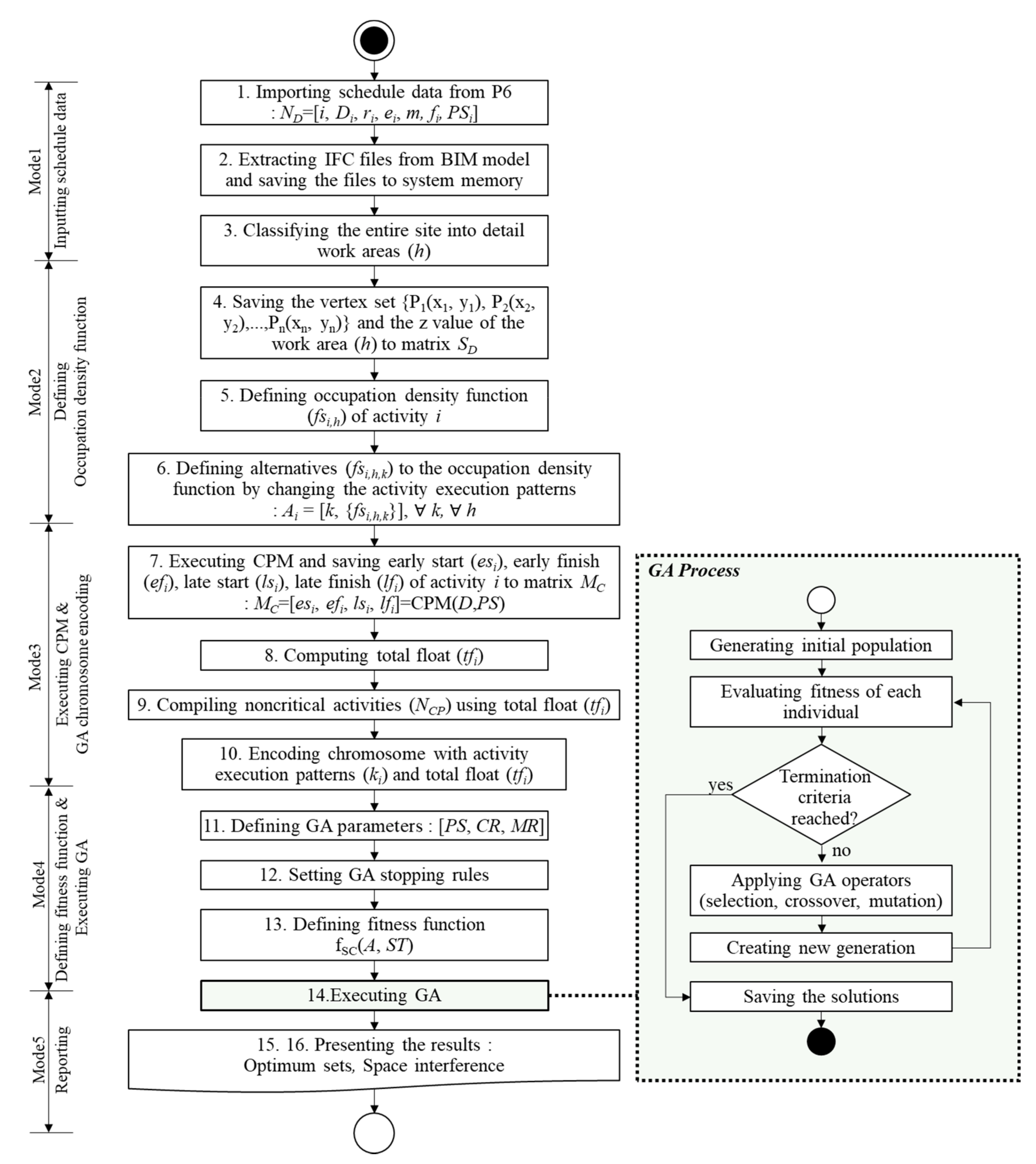
3.1. Method Overview
3.2. Importing Schedule Information from a Project Database
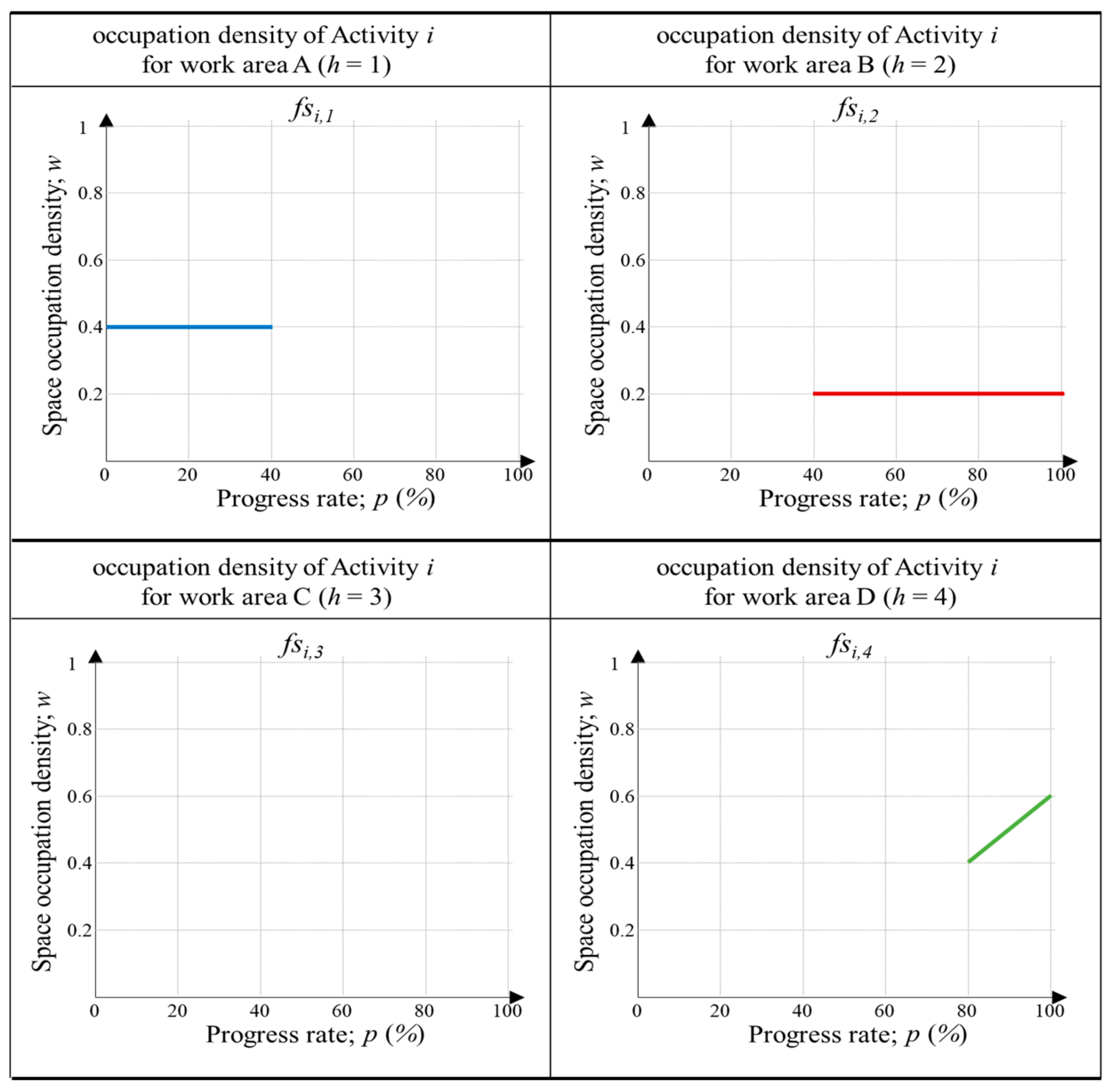
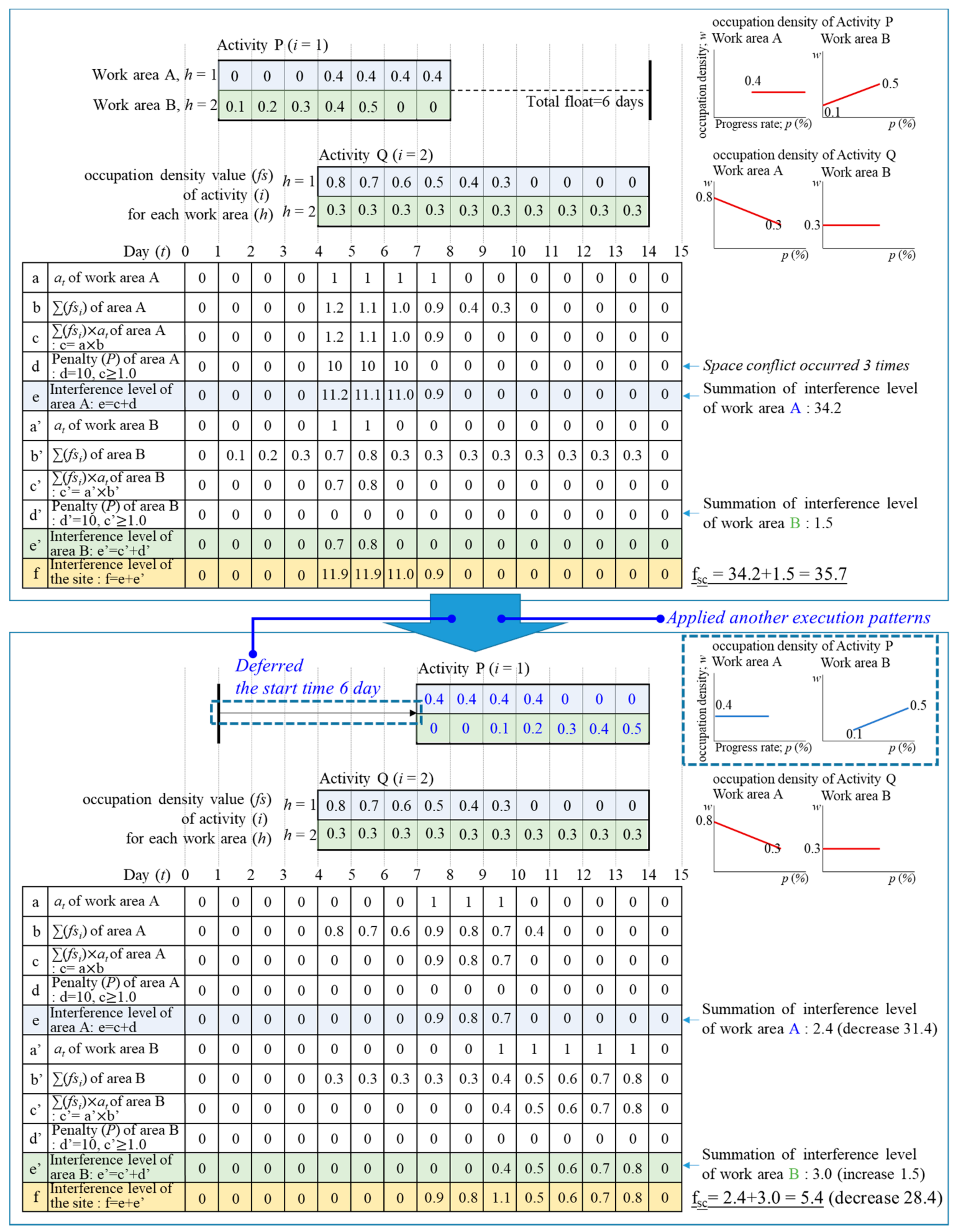
3.3. Defining the Occupation Density Function
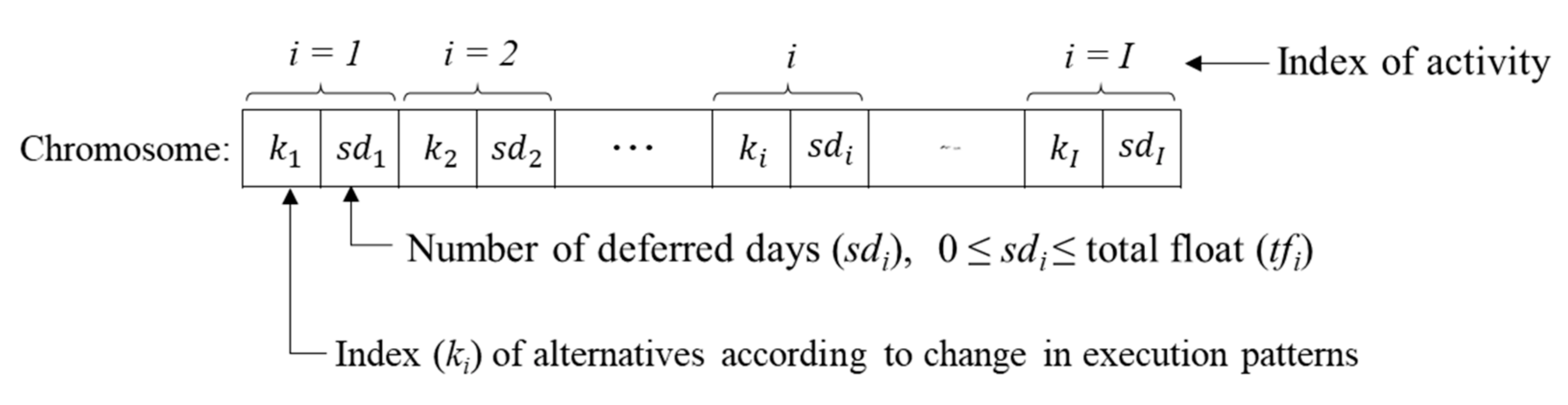
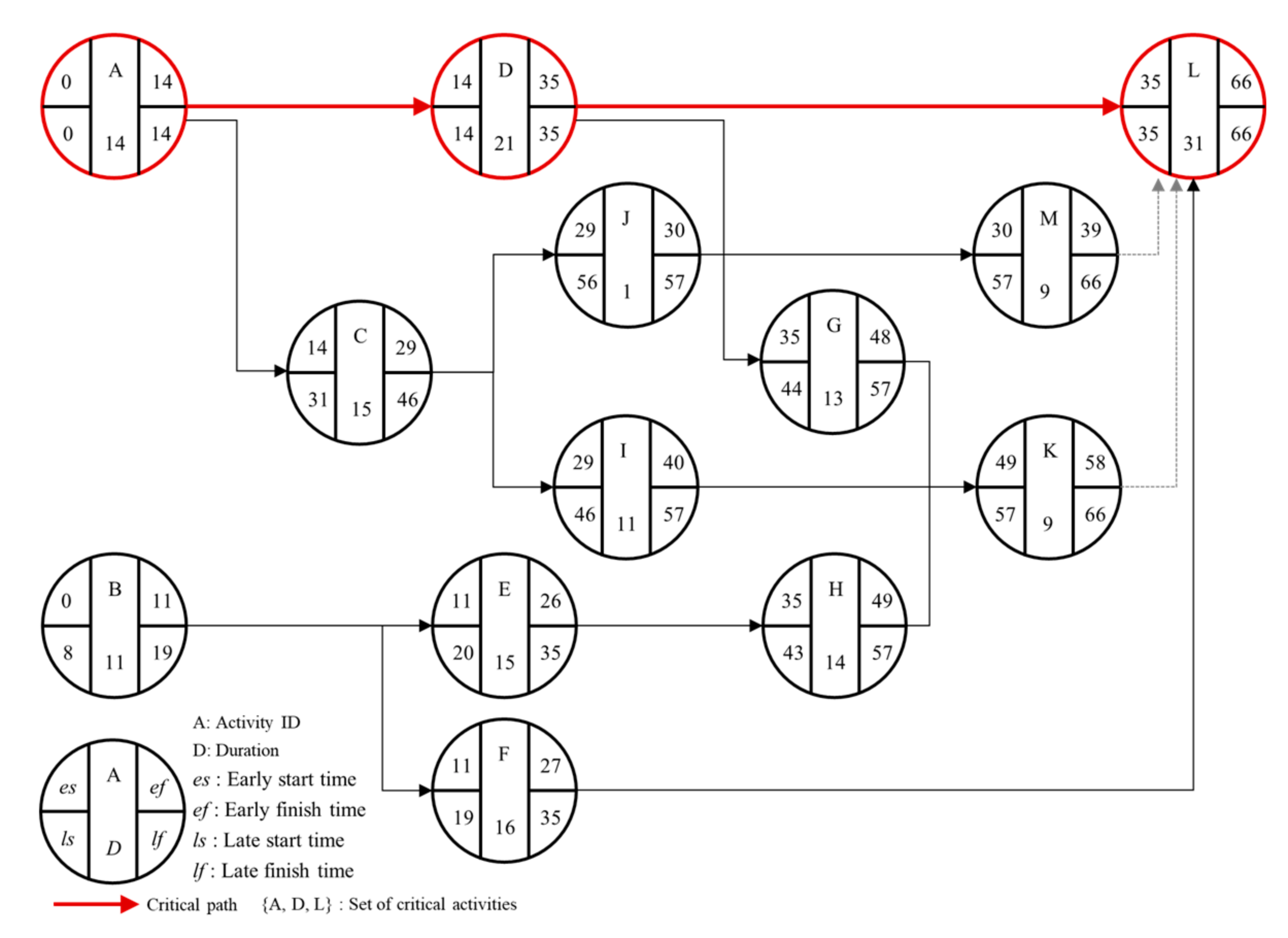
3.4. Executing CPM and GA Chromosome Encoding
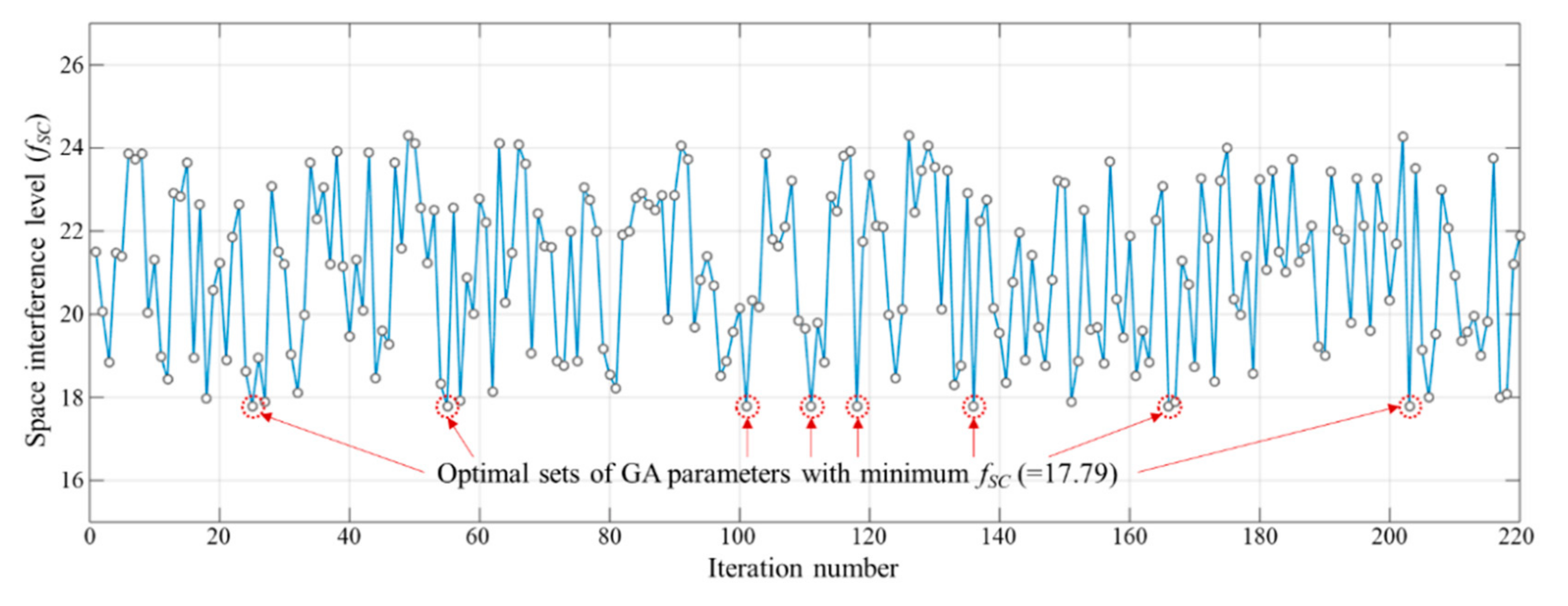
3.5. Defining the Objective Function and Executing GA
3.6. Output Near-Global Optimal Schedule
4. Method Verification
4.1. Verifying the Effectiveness of SSO
4.2. Verifying the Outperformance of SSO for Handling a Large Network
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Abbreviations
| A | The set of alternatives of activity execution pattern |
| at,h | The binary number that determines whether work area h occupied simultaneously by multiple activities at time t |
| CR | The crossover rate |
| Di | The duration of activity i |
| ei,h(p) | The work area occupied by equipment in work area h when the rate of progress for activity i is p |
| ei | The number of equipment per day for activity i |
| esi | The early start time of activity i |
| efi | The early finish time of activity i |
| fi | The required temporary facilities for activity i |
| fsi,h,k | The occupation density function for work area h when the execution pattern alternative for activity i is k |
| fi,h(p) | The area occupied by temporary facilities in work area h when the rate of progress for activity i is p |
| fSC(A, ST) | The objective function that computes the space interference level given a set of alternatives of activity execution pattern (A) and set of deferred start times (ST) |
| g | The number of evolved generation that was necessary for reaching an optimal solution |
| h | The index of a work area |
| i | The index of an activity |
| j | The index of a noncritical activity |
| Ki | The number of alternatives for the occupation density function of activity i |
| ki | The index of the alternatives of execution patterns for activity i |
| lsi | The late start times of activity i |
| lfi | The late finish times of activity i |
| mi | The required amount of material for activity i |
| mi,h(p) | The work area occupied by material in work area h when the rate of progress for activity i is p |
| MR | The mutation rate |
| ND | The matrix that stores the schedule information (i.e., activity index, activity duration, the number of laborers, the number of equipment, required amount of material, required temporary facilities, predecessor). |
| NCP | The set of noncritical activities |
| PSi | The predecessor of activity i |
| P | The rate of progress |
| PS | The population size |
| pi,t | The progress rate of activity i at time t |
| Pt,h | The penalty when the sum of the occupation density in work area h at time t is greater than 1 |
| ri,h(p) | The work area occupied by the labor in the work area h when the rate of progress for activity i is p |
| ri | The number of labors per day for activity i |
| sh | The area size of work area h |
| sti | The start time of noncritical activity i |
| sdi | The number of deferred days of start time for activity i |
| SS | The search range of the optimal solution |
| ST | The set of deferred start times |
| SD | The matrix that stores the vertex coordinates set and z value of the specific work area h |
| tfi | The total floats of activity i |
References
- Tao, S.; Wu, C.; Hu, S.; Xu, F. Construction project scheduling under workspace interference. Comput.-Aided Civ. Infrastruct. Eng. 2020, 35, 923–946. [Google Scholar] [CrossRef]
- Akinci, B.; Fischer, M.; Kunz, J. Automated generation of work spaces required by construction activities. J. Constr. Eng. Manag. 2002, 128, 306–315. [Google Scholar] [CrossRef] [Green Version]
- Dawood, N.; Mallasi, Z. Construction workspace planning: Assignment and analysis utilizing 4D visualization technologies. Comput.-Aided Civ. Infrastruct. Eng. 2006, 21, 498–513. [Google Scholar] [CrossRef]
- Chavada, R.; Dawood, N.; Kassem, M. Construction workspace management: The development and application of a novel nD planning approach and tool. J. Inf. Technol. Constr. 2012, 17, 213–236. [Google Scholar]
- Moon, H.; Kim, H.; Kim, C.; Kang, L. Development of a schedule-workspace interference management system simultaneously considering the overlap level of parallel schedules and workspaces. Autom. Constr. 2014, 39, 93–105. [Google Scholar] [CrossRef]
- Kassem, M.; Dawood, N.; Chavada, R. Construction workspace management within an Industry Foundation Class-Compliant 4D tool. Autom. Constr. 2015, 52, 42–58. [Google Scholar] [CrossRef]
- Luo, X.; Li, H.; Wang, H.; Wu, Z.; Dai, F.; Cao, D. Vision-based detection and visualization of dynamic workspaces. Autom. Constr. 2019, 104, 1–13. [Google Scholar] [CrossRef]
- Rojas, E.M. Construction Productivity: A Practical Guide for Building and Electrical Contractors; J. Ross Publishing: Plantation, FL, USA, 2008; pp. 75–110. [Google Scholar]
- Serag, E.; Oloufa, A.; Malone, L.; Radwan, E. Model for quantifying the impact of change orders on project cost for US roadwork construction. J. Constr. Eng. Manag. 2010, 136, 1015–1027. [Google Scholar] [CrossRef]
- Ottesen, J.L.; Martin, G.A. Bare facts and benefits of resource-loaded CPM schedules. J. Leg. Aff. Disput. Resolut. Eng. Constr. 2019, 11, 02519001. [Google Scholar] [CrossRef]
- Hanna, A.S.; Chang, C.K.; Lackney, J.A.; Sullivan, K.T. Overmanning impact on construction labor productivity. In Construction Research Congress 2005: Broadening Perspectives; ASCE: Reston, VA, USA, 2005; pp. 1–10. [Google Scholar]
- Thomas, H.R.; Riley, D.R.; Sinha, S.K. Fundamental principles for avoiding congested work areas-A case study. Pract. Period. Struct. Des. Constr. 2006, 11, 197–205. [Google Scholar] [CrossRef]
- Guo, S.J. Identification and resolution of work space conflicts in building construction. J. Constr. Eng. Manag. 2002, 128, 287–295. [Google Scholar] [CrossRef]
- Choi, B.; Lee, H.S.; Park, M.; Cho, Y.K.; Kim, H. Framework for work-space planning using four-dimensional BIM in construction projects. J. Constr. Eng. Manag. 2014, 140, 04014041. [Google Scholar] [CrossRef]
- Getuli, V.; Capone, P. Computational workspaces management: A workflow to integrate workspaces dynamic planning with 4D BIM. In Proceedings of the International Symposium on Automation and Robotics in Construction, Berlin, Germany, 20–25 July 2018. [Google Scholar]
- Dashti, M.S.; RezaZadeh, M.; Khanzadi, M.; Taghaddos, H. Integrated BIM-based simulation for automated time-space conflict management in construction projects. Autom. Constr. 2021, 132, 103957. [Google Scholar] [CrossRef]
- Mirzaei, A.; Nasirzadeh, F.; Parchami Jalal, M.; Zamani, Y. 4D-BIM dynamic time–space conflict detection and quantification system for building construction projects. J. Constr. Eng. Manag. 2018, 144, 04018056. [Google Scholar] [CrossRef]
- Lai, K.C.; Kang, S.C. Collision detection strategies for virtual construction simulation. Autom. Constr. 2009, 18, 724–736. [Google Scholar] [CrossRef]
- Bansal, V.K. Use of GIS and topology in the identification and resolution of space conflicts. J. Comput. Civ. Eng. 2011, 25, 159–171. [Google Scholar] [CrossRef]
- Riley, D.R.; Sanvido, V.E. Space planning method for multistory building construction. J. Constr. Eng. Manag. 1997, 123, 171–180. [Google Scholar] [CrossRef]
- Lidbe, A.D.; Hainen, A.M.; Jones, S.L. Comparative study of simulated annealing, tabu search, and the genetic algorithm for calibration of the microsimulation model. Simulation 2017, 93, 21–33. [Google Scholar] [CrossRef]
- Zhang, C.; Ouyang, D.; Ning, J. An artificial bee colony approach for clustering. Expert Syst. Appl. 2010, 37, 4761–4767. [Google Scholar] [CrossRef]
- Said, G.A.E.N.A.; Mahmoud, A.M.; El-Horbaty, E.S.M. A comparative study of meta-heuristic algorithms for solving quadratic assignment problem. arXiv 2014, arXiv:1407.4863. [Google Scholar]
- Kim, C.; Kim, B.; Kim, H. 4D CAD model updating using image processing-based construction progress monitoring. Autom. Constr. 2013, 35, 44–52. [Google Scholar] [CrossRef]
- Mahami, H.; Nasirzadeh, F.; Hosseininaveh Ahmadabadian, A.; Nahavandi, S. Automated progress controlling and monitoring using daily site images and building information modelling. Buildings 2019, 9, 70. [Google Scholar] [CrossRef] [Green Version]
- Chen, X.; Zhu, Y.; Chen, H.; Ouyang, Y.; Luo, X.; Wu, X. BIM-based optimization of camera placement for indoor construction monitoring considering the construction schedule. Autom. Constr. 2021, 130, 103825. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Activity ID | Activity Index (i) | Predecessors (PSi) | Duration (Di) | Workers Num. (Unit Size) (ri) | Equip. Num. (Unit Size) (ei) | Material Qty. (Unit Size) (mi) | Temp. Facility Qty. (unit size) (fi) | Total Float (tfi) | Alt. Num. (ki) |
|---|---|---|---|---|---|---|---|---|---|
| A | 1 | - | 14 | 5 (4 m2) | 1 (10 m2) | - | 2 (8 m2) | 0 | 3 |
| B | 2 | - | 11 | 3 (4 m2) | 1 (10 m2) | 23 (1 m2) | - | 8 | 2 |
| C | 3 | A | 15 | 2 (4 m2) | 1 (15 m2) | 15 (2 m2) | 1 (10 m2) | 17 | 2 |
| D | 4 | A | 21 | 2 (4 m2) | - | - | 2 (10 m2) | 0 | 1 |
| E | 5 | B | 15 | 5 (4 m2) | 1 (15 m2) | - | - | 9 | 4 |
| F | 6 | B | 16 | 3 (4 m2) | - | 15 (2 m2) | - | 8 | 2 |
| G | 7 | D,E | 13 | 3 (4 m2) | - | - | - | 9 | 1 |
| H | 8 | D,E,F | 14 | 5 (4 m2) | - | 5 (1 m2) | 1 (10 m2) | 8 | 2 |
| I | 9 | C | 11 | 3 (4 m2) | - | 8 (1 m2) | 2 (7 m2) | 17 | 2 |
| J | 10 | C | 1 | 1 (4 m2) | 2 (15 m2) | 20 (1 m2) | 1 (5 m2) | 27 | 1 |
| K | 11 | G,H,I | 9 | 3 (4 m2) | - | 5 (4 m2) | 1 (8 m2) | 8 | 2 |
| L | 12 | D,E,F | 31 | 3 (4 m2) | 1 (15 m2) | 15 (2 m2) | - | 0 | 2 |
| M | 13 | J | 9 | 2 (4 m2) | 3 (5 m2) | 8 (1 m2) | - | 27 | 3 |
| Activity ID (Index) | Index of Alt. (ki) | Occupation Density Function (fsi,h,k(p), p: Progress Rate) | ||
|---|---|---|---|---|
| Work Area A (h = 1) | Work Area B (h = 2) | Work Area C (h = 3) | ||
| A (i = 1) | 1 | fs1,1,1(p) = 0.4, 0 < p ≤ 0.7 | fs1,2,1(p) = 0.33p − 0.03, 0.7 < p ≤ 1 | fs1,3,1(p) = 0.3, 0 < p ≤ 0.7 |
| 2 | fs1,1,2(p) = 0.33p − 0.03, 0.7 < p ≤ 1 | fs1,2,2(p) = 0.3, 0 < p ≤ 0.7 | fs1,3,2(p) = 0.3, 0 < p ≤ 0.7 | |
| 3 | fs1,1,3(p) = −0.2p + 0.3, 0.5 < p ≤ 1 | fs1,2,3(p) = 0.1, 0 < p ≤ 1 | - | |
| B (i = 2) | 1 | fs2,1,1(p) = 0.2p + 0.1, 0 < p ≤ 0.5 | fs2,2,1(p) = −0.41(p − 0.3)2 + 0.4, 0 < p ≤ 0.5 | - |
| 2 | fs2,1,2(p) = −0.41(p − 0.3)2 + 0.4, 0 < p ≤ 0.5 | fs2,1,1(p) = 0.2p + 0.1, 0 < p ≤ 0.5 | - | |
| C (i = 3) | 1 | fs3,1,1(p) = 0.3, 0 < p ≤ 0.5 | fs3,2,1(p) = 0.8p, 0 < p ≤ 0.5 | fs3,3,1(p) = 1/2.5log(p + 1) + 0.2, 0 < p ≤ 0.8 |
| 2 | fs3,1,2(p) = 0.4p + 0.1, 0 < p ≤ 0.5 | fs3,2,2(p) = 0.1, 0.5 < p ≤ 1 | fs3,3,2(p) = 1/0.8log(p + 1) + 0.5, 0 < p ≤ 0.8 | |
| D (i = 4) | 1 | - | fs4,2,1(p) = 1.1p − 0.8, 0 < p ≤ 0.7 | fs4,3,1(p) = 0.2, 0.3 < p ≤ 0.7 |
| E (i = 5) | 1 | fs5,1,1(p) = 0.4, 0 < p ≤ 0.4 | fs5,2,1(p) = 0.33p − 0.03, 0.2 < p ≤ 0.8 | fs5,3,1(p) = −2.5(p − 0.8)2 + 0.4, 0.8 < p ≤ 1 |
| 2 | fs5,1,2(p) = 0.33p − 0.03, 0.2 < p ≤ 0.8 | fs5,2,2(p) = 0.2, 0 < p ≤ 0.4 | fs5,3,2(p) = −5(p − 0.8)2 + 0.7, 0.8 < p ≤ 1 | |
| 3 | fs5,1,3(p) = 0.2, 0 < p ≤ 0.3 | fs5,2,3(p) = 0.14p + 0.16, 0.3 < p ≤ 1 | fs5,3,3(p) = 1/0.4log(p + 0.8) + 0.1, 0.2 < p ≤ 0.4 | |
| 4 | fs5,1,4(p) = 1/0.4log(p + 0.8) + 0.1, 0.2 < p ≤ 0.4 | fs5,2,4(p) = 0.14p + 0.16, 0.3 < p ≤ 1 | fs5,4,4(p) = 0.2, 0 < p ≤ 0.3 | |
| F (i = 6) | 1 | fs6,1,1(p) = 1/0.56log(p + 0.8) + 0.2, 0.2 < p ≤ 0.5 | fs6,2,1(p) = 0.2, 0 < p ≤ 0.5 | fs6,3,1(p) = 0.7(p − 0.4) − 0.7, 0.4 < p ≤ 1 |
| 2 | fs6,1,2(p) = 0.2, 0 < p ≤ 0.5 | fs6,2,2(p) = 1/0.5log(p + 0.8) + 0.2, 0.2 < p ≤ 0.5 | fs6,3,2(p) = 0.7(p − 0.4) − 0.6, 0.4 < p ≤ 1 | |
| G (i = 7) | 1 | fs7,1,1(p) = 0.2, 0 < p ≤ 1 | - | - |
| H (i=8) | 1 | - | fs8,2,1(p) = −0.5(p − 0.4)2 + 0.6, 0.4 < p ≤ 1 | fs8,3,1(p) = 0.1, 0 < p ≤ 0.5 |
| 2 | fs8,1,2(p) = 0.1, 0 < p ≤ 0.5 | fs8,2,2(p) = 0.2, 0.3 < p ≤ 0.7 | fs8,3,2(p) = −2.2(p − 0.7)2 + 0.6, 0.7 < p ≤ 1 | |
| I (i = 9) | 1 | fs9,1,1(p) = 0.14p + 0.4, 0 < p ≤ 0.7 | fs9,2,1(p) = −0.2p + 0.3, 0.5 < p ≤ 1 | - |
| 2 | fs9,1,2(p) = −0.2p + 0.3, 0.5 < p ≤ 1 | fs9,2,2(p) = 1.4p + 0.2, 0 < p ≤ 0.7 | - | |
| J (i = 10) | 1 | - | fs10,2,1(p) = 0.5, 0 < p ≤ 1 | fs10,3,1(p) = 0.4(p − 0.3)2 + 0.2, 0.3 < p ≤ 1 |
| K (i = 11) | 1 | - | - | fs11,3,1(p) = −0.2p + 0.4, 0 < p ≤ 1 |
| L (i = 12) | 1 | fs12,1,1(p) = 0.2p + 0.2, 0 < p ≤ 1 | fs12,2,1(p) = 0.8(p − 0.4) − 0.8, 0.4 < p ≤ 1 | fs12,3,1(p) = 1/0.4log(p + 0.8) + 0.1, 0.2 < p ≤ 0.4 |
| 2 | fs12,1,2(p) = 0.8(p − 0.4) − 0.8, 0.4 < p ≤ 1 | fs12,2,2(p) = 0.1p + 0.1, 0 < p ≤ 1 | fs12,3,2(p) = 1/0.4log(p + 0.8) + 0.1, 0.2 < p ≤ 0.4 | |
| M (i =13) | 1 | fs13,1,1(p) = 0.4, 0 < p ≤ 0.3 | fs13,2,1(p) = −0.3p + 0.6, 0 < p ≤ 1 | - |
| 2 | fs13,1,2(p) = 0.5, 0 < p ≤ 1 | fs13,2,2(p) = 0.4(p − 0.3)2 + 0.2, 0.3 < p ≤ 1 | - | |
| 3 | fs13,1,3(p) = −0.3p + 0.4, 0 < p ≤ 1 | fs13,2,2(p) = 0.2, 0 < p ≤ 0.3 | - | |
| Activity ID | A | B | C | D | E | F | G | H | I | J | K | L | M |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| i | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 |
| Solution (ki, sdi) | (3, 0) | (1, 0) | (2, 0) | (1, 0) | (1, 4) | (2, 8) | (1, 1) | (2, 0) | (1, 13) | (1, 0) | (1, 2) | (1, 0) | (3, 1) |
| Execution pattern Alt. (ki) | 3 | 1 | 2 | 1 | 1 | 2 | 1 | 2 | 1 | 1 | 1 | 1 | 3 |
| Deferred start time (sdi) | 0 | 0 | 0 | 0 | 4 | 8 | 1 | 0 | 13 | 0 | 2 | 0 | 1 |
| Exceeded occupation allowance | Does not occur | ||||||||||||
| Space interference level (fSC) | 17.79 (8.62 on A work area; 5.77 on B work area; 3.40 on C work area) | ||||||||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gwak, H.-S.; Shin, W.-S.; Park, Y.-J. Space-Constrained Scheduling Optimization Method for Minimizing the Effects of Stacking of Trades. Appl. Sci. 2021, 11, 11047. https://doi.org/10.3390/app112211047
Gwak H-S, Shin W-S, Park Y-J. Space-Constrained Scheduling Optimization Method for Minimizing the Effects of Stacking of Trades. Applied Sciences. 2021; 11(22):11047. https://doi.org/10.3390/app112211047
Chicago/Turabian StyleGwak, Han-Seong, Won-Sang Shin, and Young-Jun Park. 2021. "Space-Constrained Scheduling Optimization Method for Minimizing the Effects of Stacking of Trades" Applied Sciences 11, no. 22: 11047. https://doi.org/10.3390/app112211047
APA StyleGwak, H.-S., Shin, W.-S., & Park, Y.-J. (2021). Space-Constrained Scheduling Optimization Method for Minimizing the Effects of Stacking of Trades. Applied Sciences, 11(22), 11047. https://doi.org/10.3390/app112211047