
Design and Experimental Study of Potato-Soil Separation Device for Sticky Soils Condition

 ,
,
Abstract
:1. Introduction
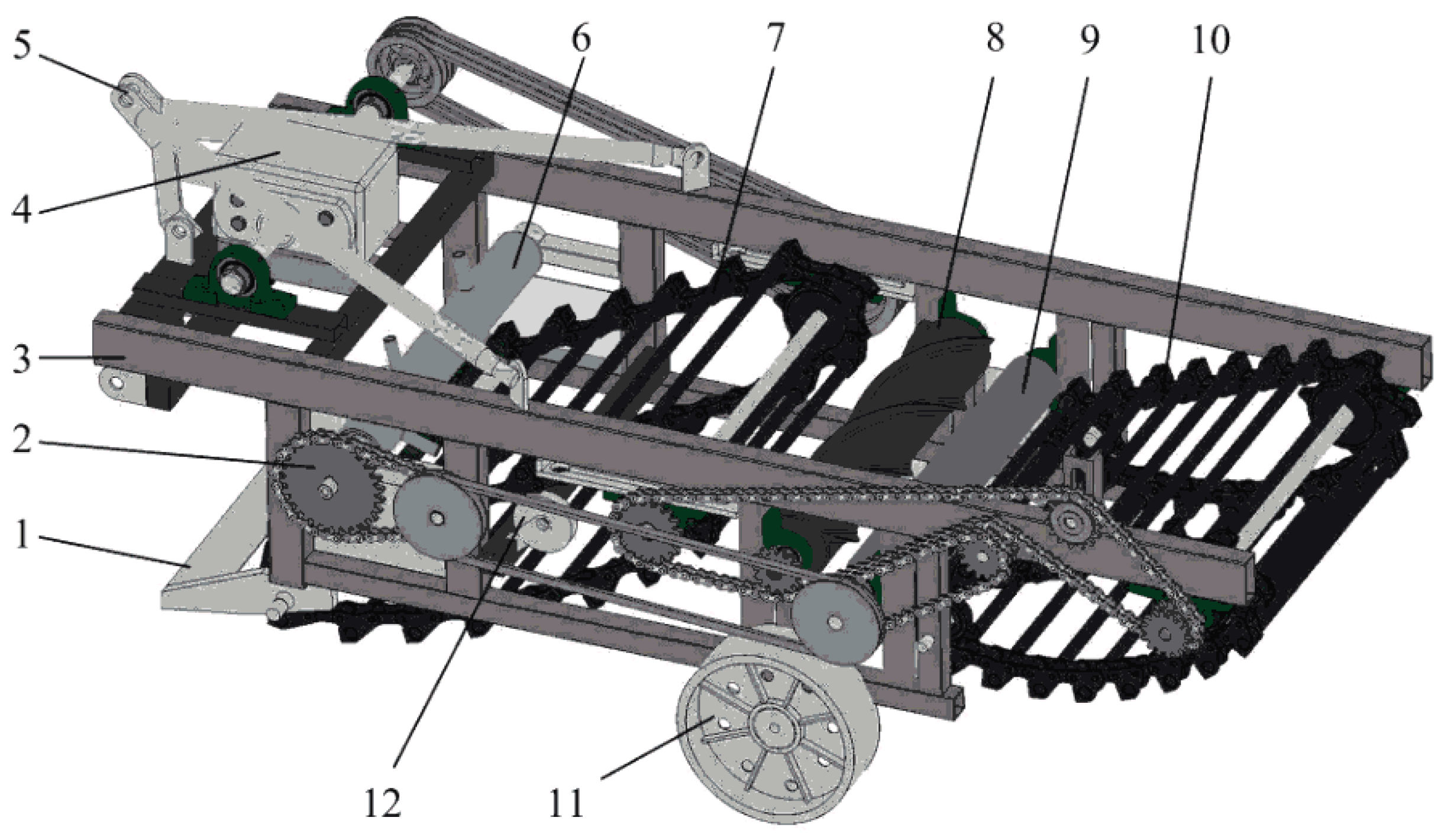
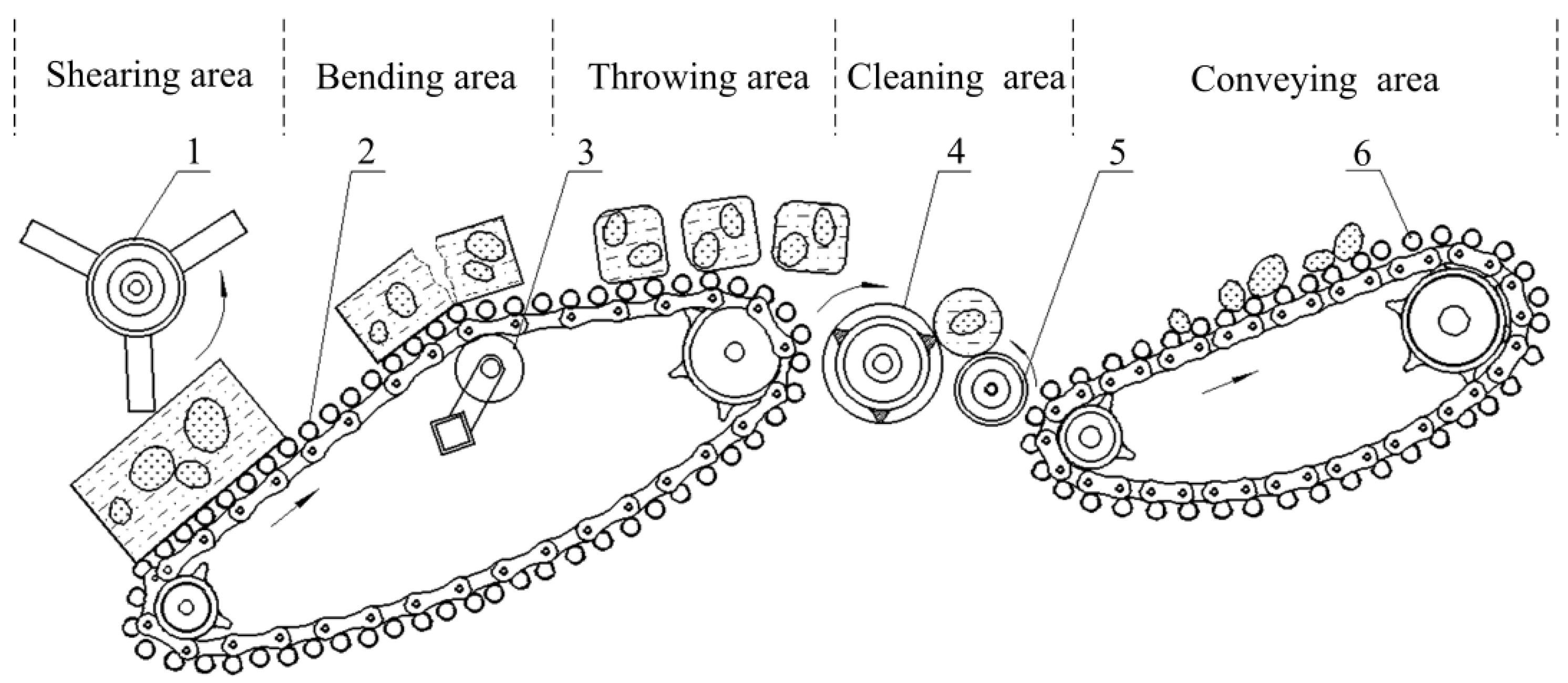
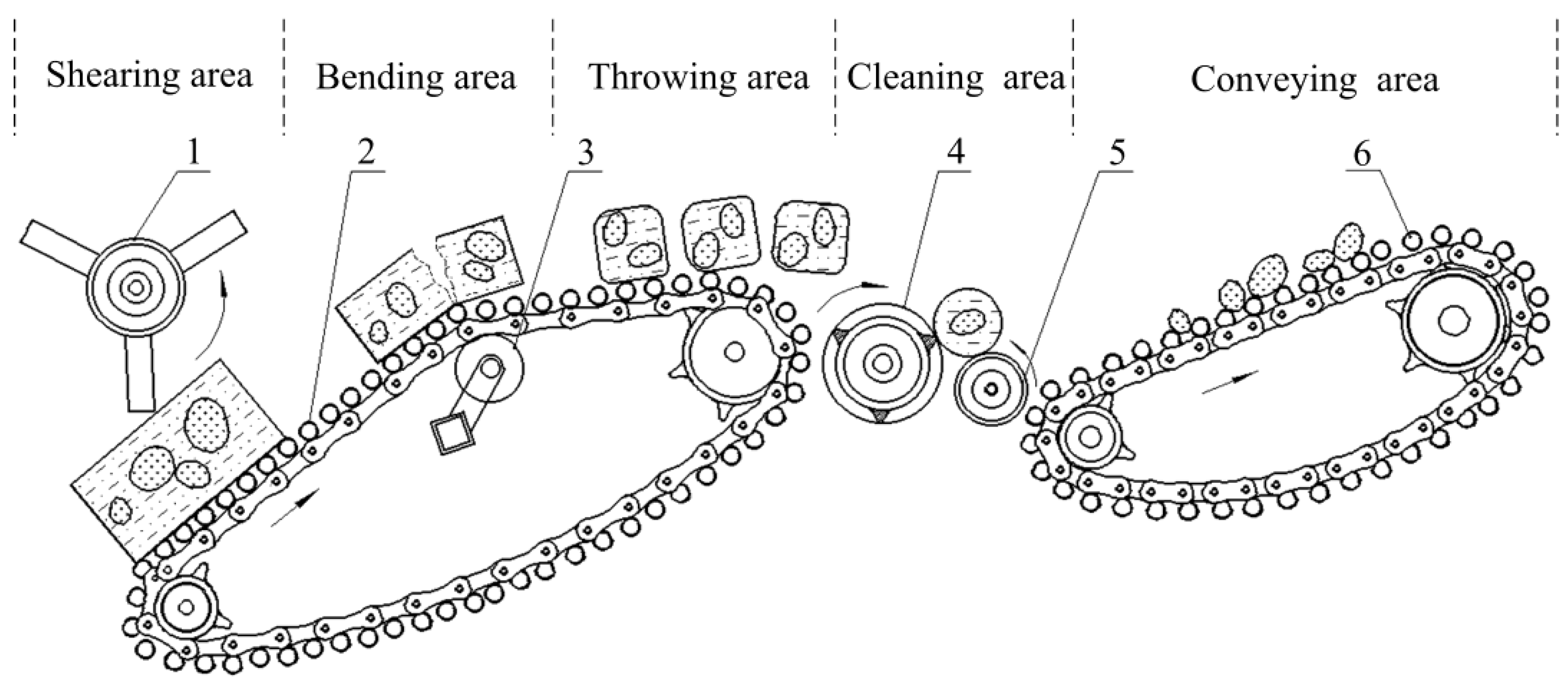
2. Structure and Working Principle
3. Key Component Parameter Design and Analysis
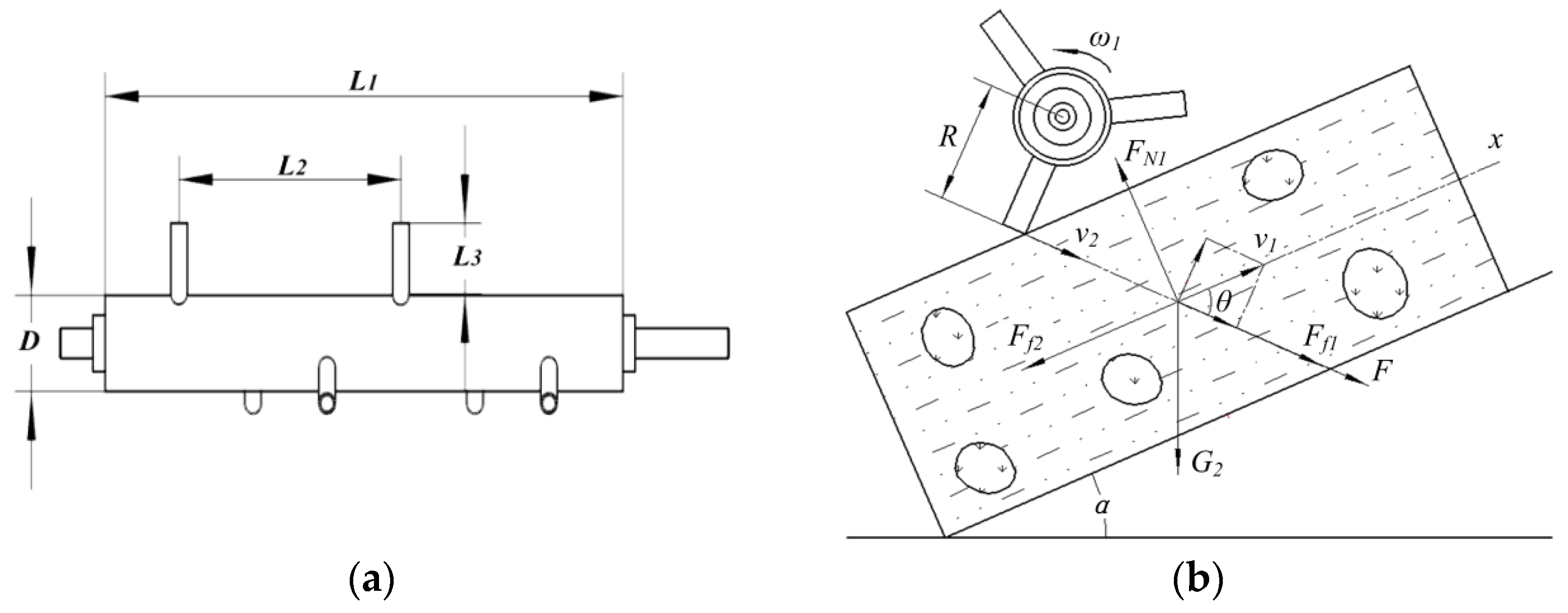
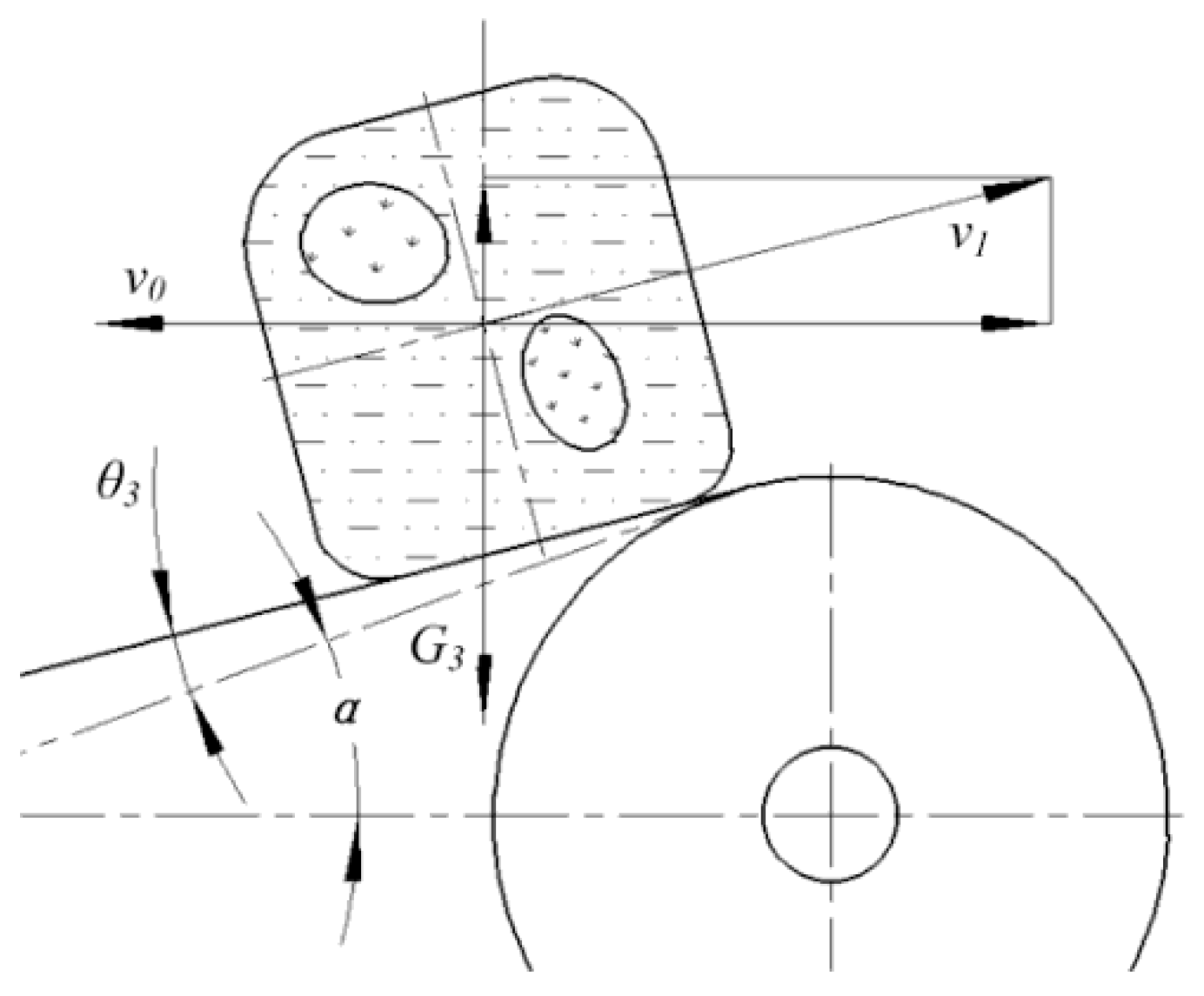
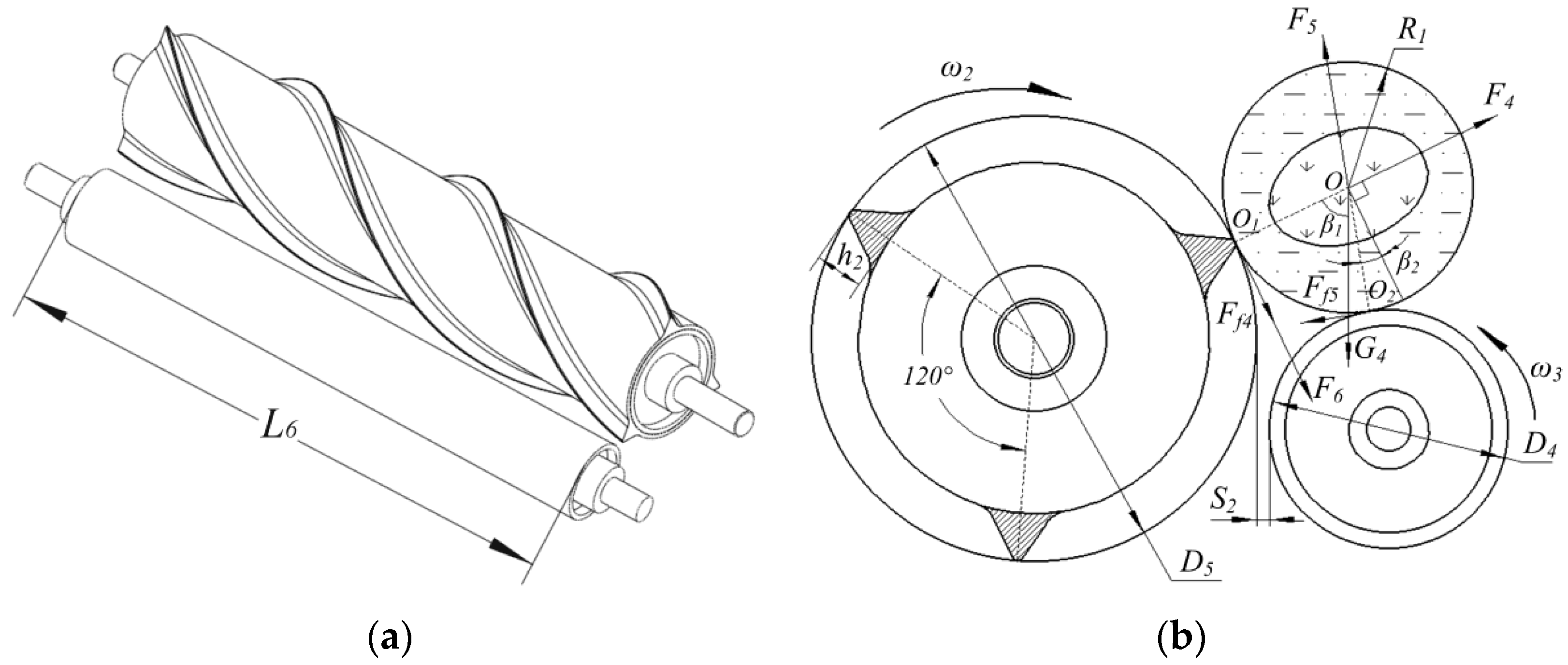
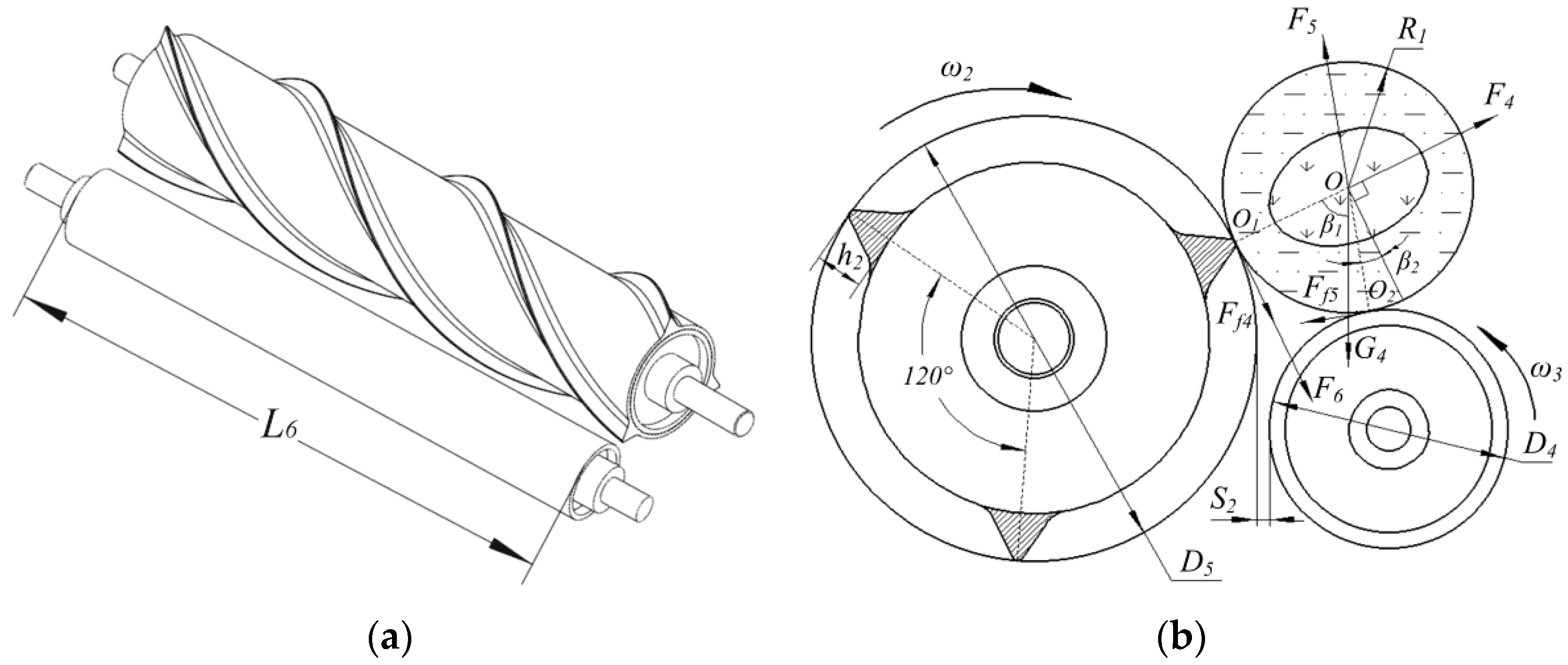
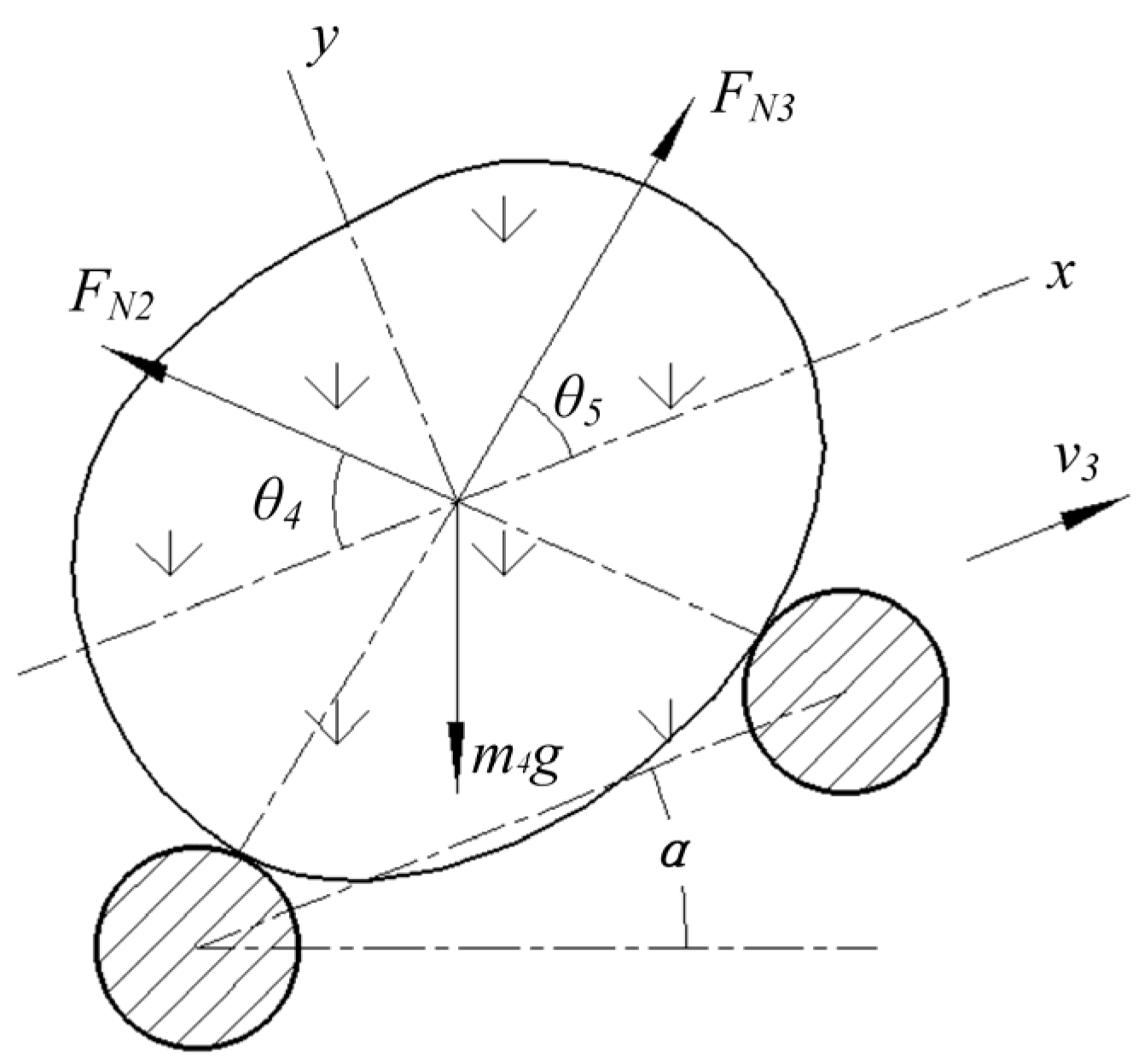
3.1. Parameters of Soil-Crushing Mechanism and Kinetic Analyses during Shearing Area
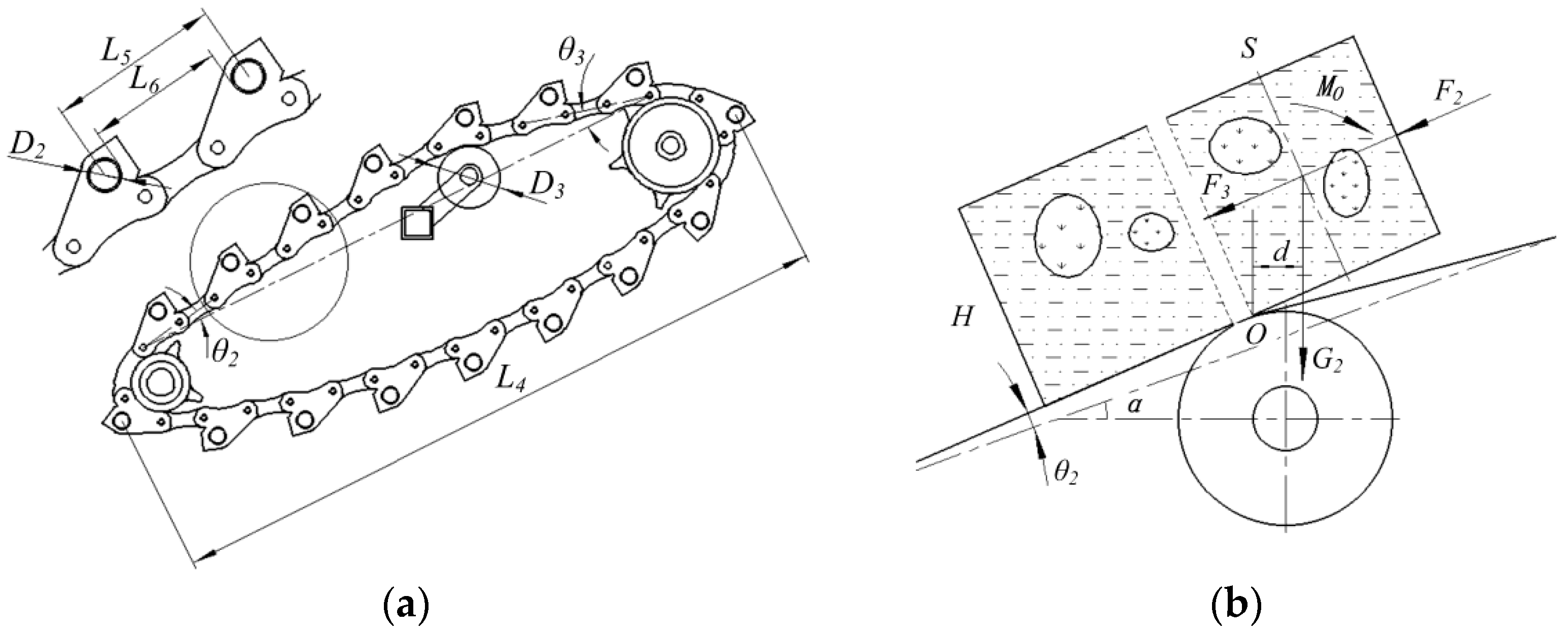
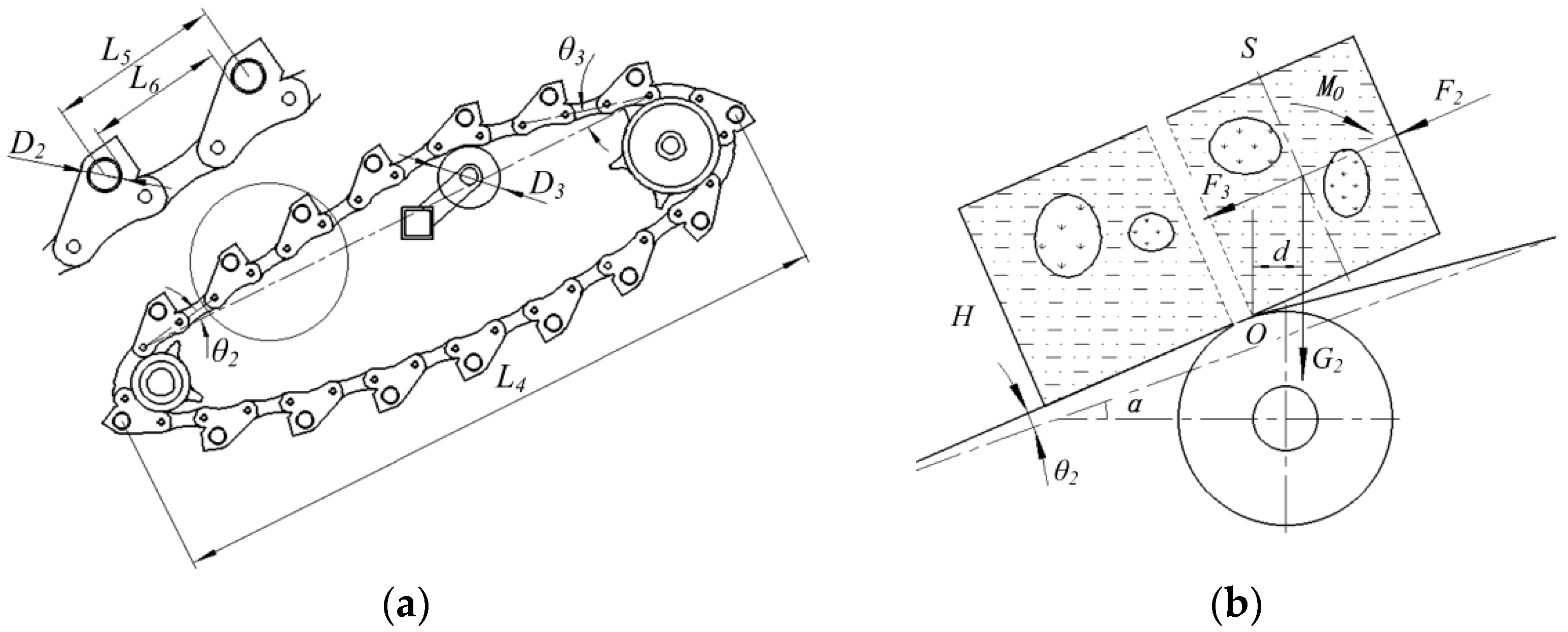
3.2. Parameters of First-Stage Lifting Chain and Kinetic Analyses during Bending Area
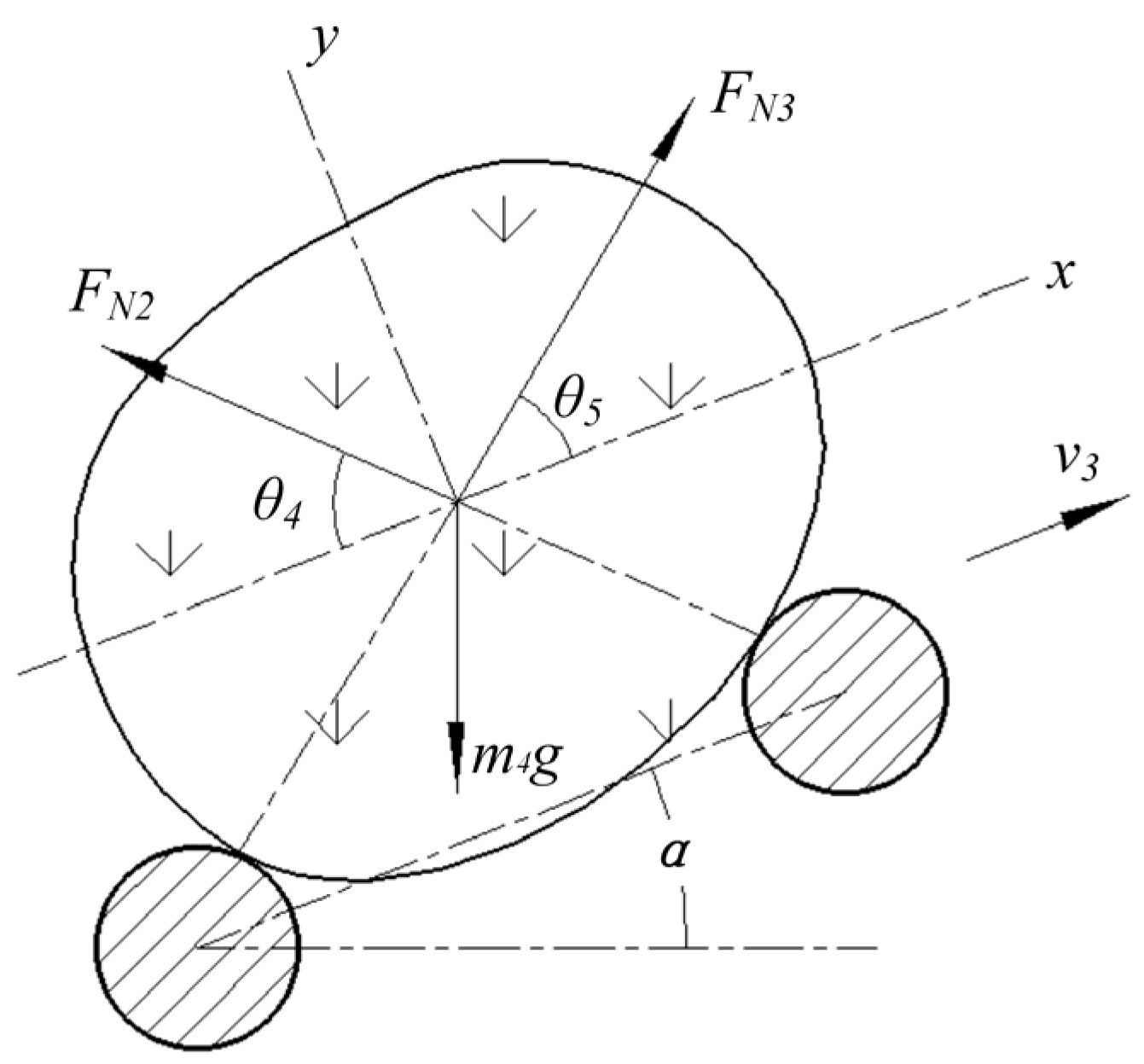
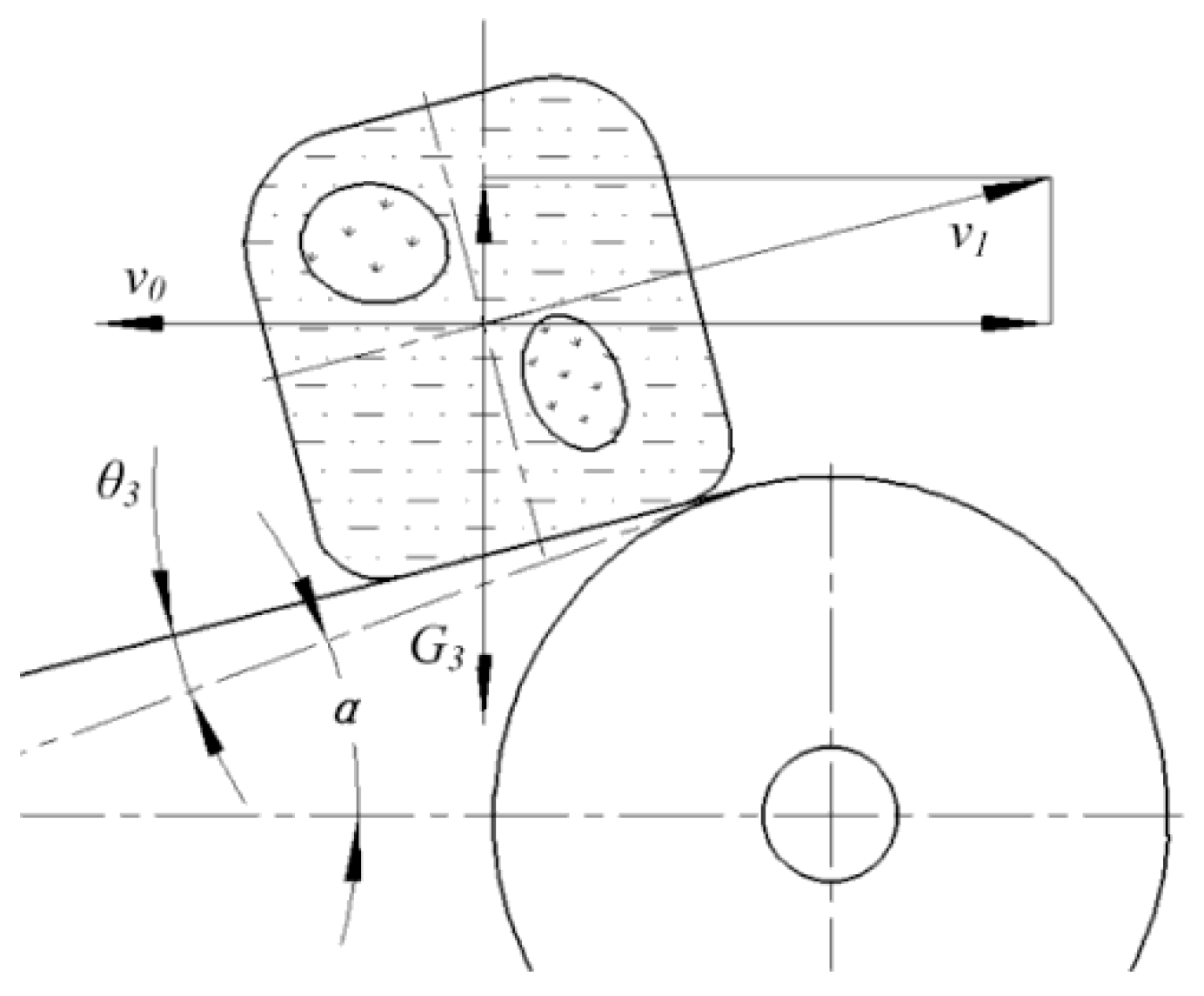
3.3. Kinetic Analyses during Throwing Area
3.4. Parameters of Debris-Cleaning Mechanism and Kinetic Analyses during Cleaning Area
3.5. Parameters of The Second-Stage Lifting Chain and Kinetic Analyses during the Conveying Area
4. Separation Device Performance Test
4.1. Test Materials and Equipment
4.2. Assessment Index
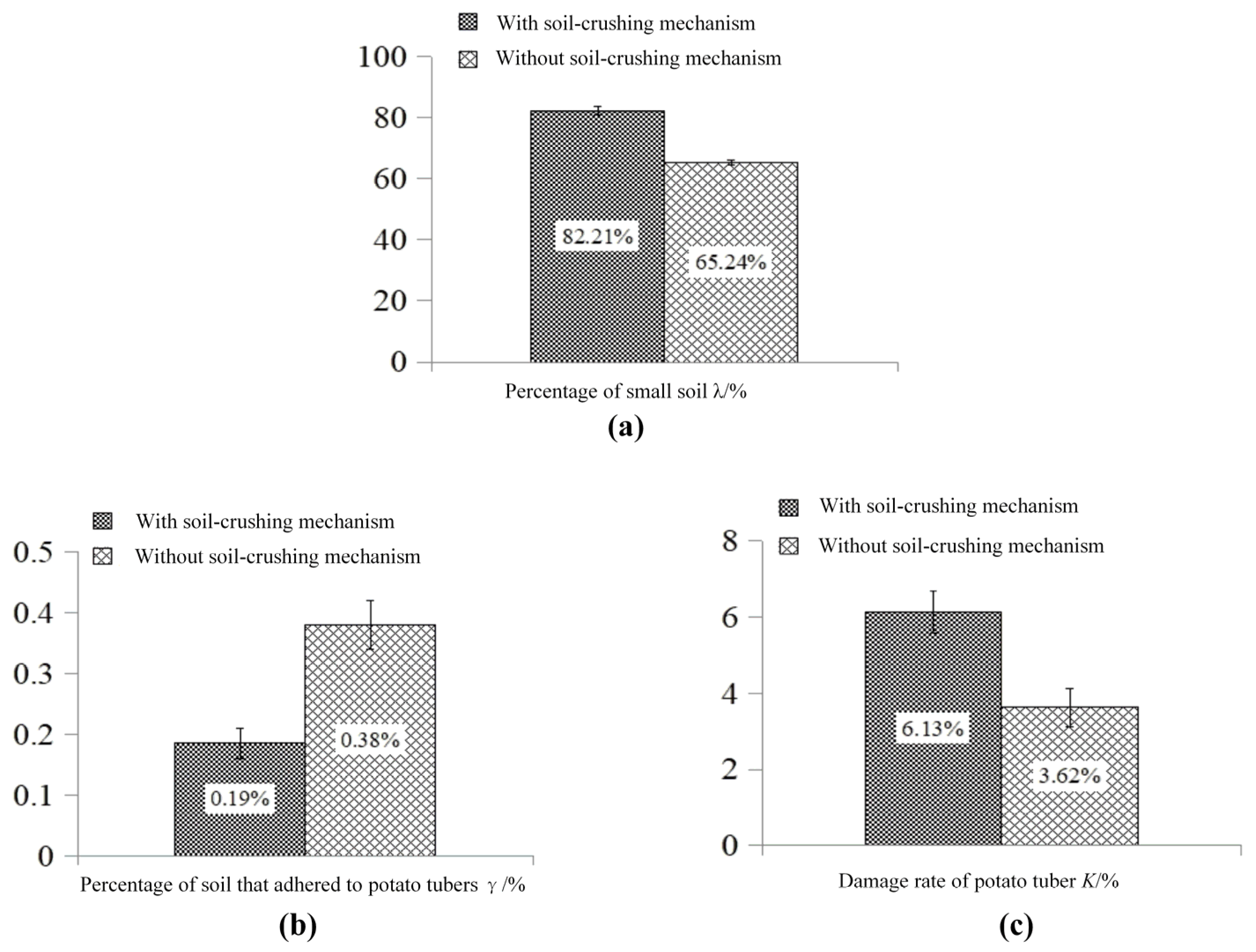
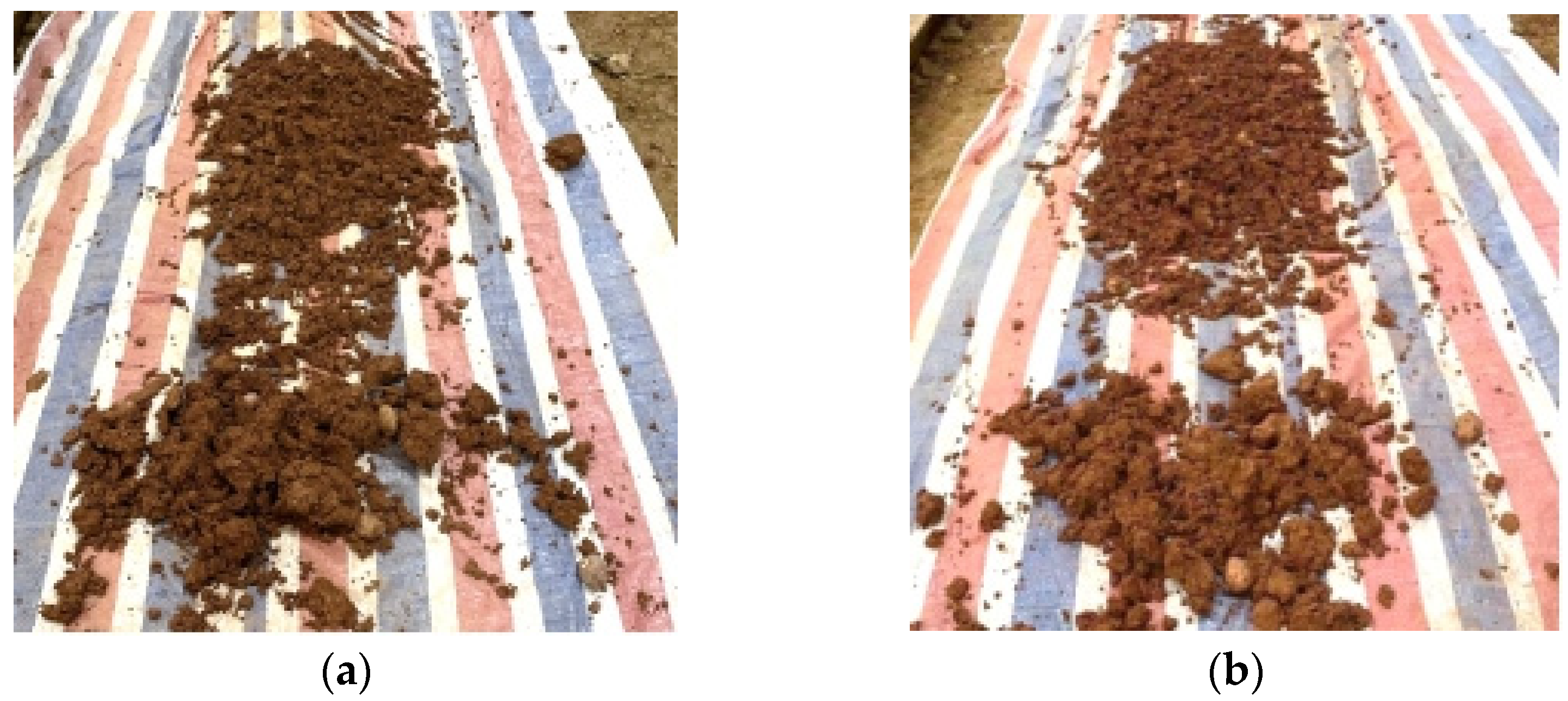
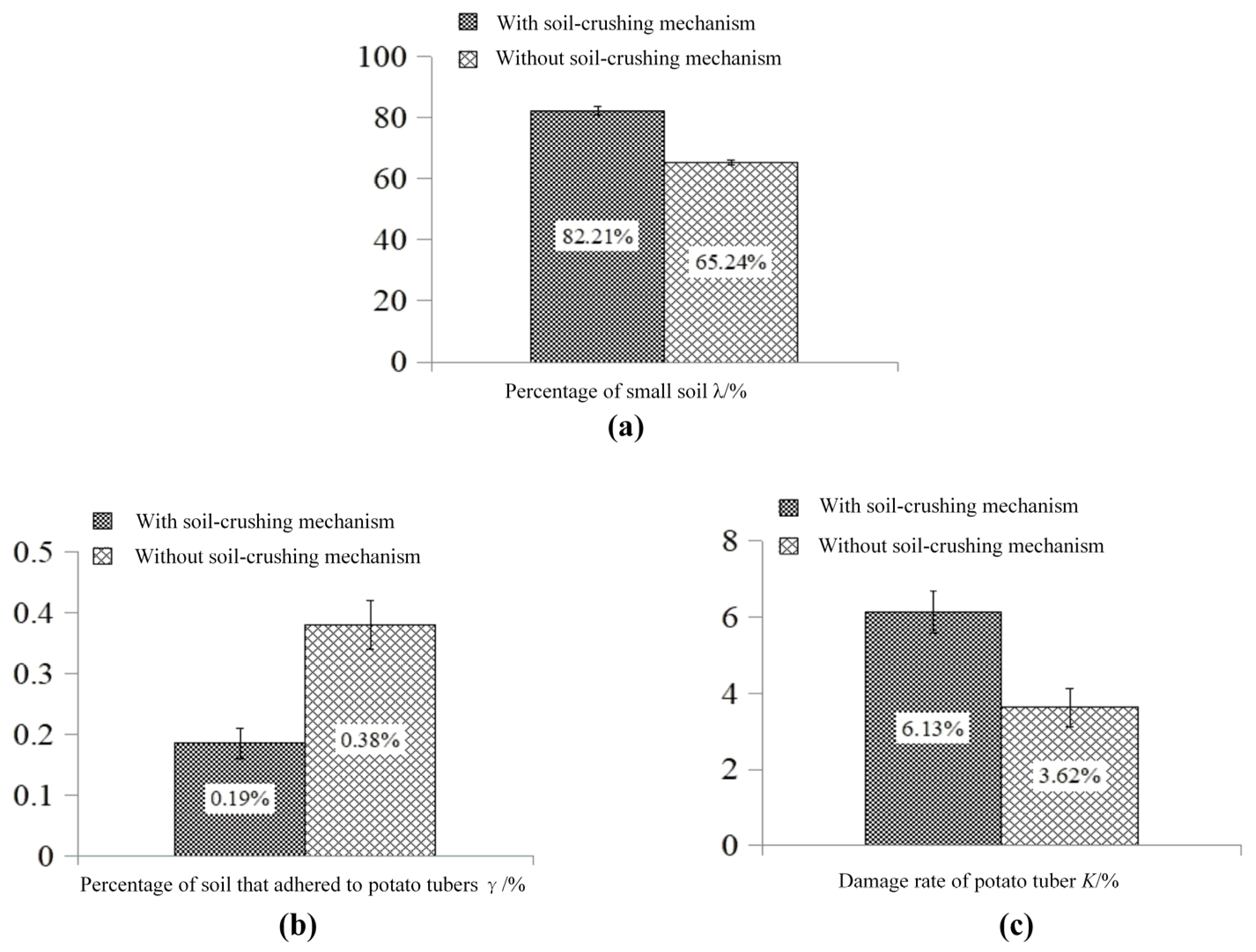
4.3. Testing Operation-Efficacy of Soil-Crushing Mechanism
4.3.1. Test Method
4.3.2. Test Result
4.4. Orthogonal Test
4.4.1. Test Method
- The moisture content of potato-soil mixture. In this study, to harvest winter potatoes in idle paddy fields of Southern China, a potato-soil separation device was developed. The main reason for affecting harvesting quality was soil exhibiting a high water capacity in idle paddy fields. Thus, to examine the effect of the different moisture content on the separation effect of potato-soil separation device, the potato-soil mixture involving three different moisture contents (i.e., 18%, 23%, and 28%) was prepared as described in Section 4.1. for the separation test.
- The rotational speed of the soil-crushing mechanism. The rotational speed of the soil-crushing mechanism impacted the soil-crushing quality and the damage degree, as determined by the kinetic analysis of potato-soil mixture in the shearing area. The rotational speed of the soil-crushing mechanism was adopted as one of the orthogonal test factors to identify optimal running parameters of the soil-crushing mechanism. During the trial, three levels of the rotation speed of the soil-crushing mechanism were set to 70 r/min, 122 r/min, and 175 r/min, respectively. The linear velocity at the tip of the soil-crushing roller tooth was equated with that of the first-stage lifting chain at the rotation speed of the soil-crushing mechanism as 70 r/min.
- The inclination angle of lifting chain. The inclination angle of the first-stage lifting chain set in this separation device was equated with that of the second-stage lifting chain. Given the kinetic analysis, as previously described, the inclination angle of the lifting chain had effects on the force and motion state of potato-soil mixture in the shearing area, the bending area, the throwing area, and the conveying area to identify the optimal inclination angle of lifting chain, that was employed as one of the orthogonal test factors. During the trial, three levels of the inclination angle of lifting chain were set to 15°, 20°, and 25°, respectively.
- The linear velocity of second-stage lifting chain. The linear velocity of second-stage lifting chain impacted the force and motion state of potato-soil mixture, as determined by the kinetic analysis of potato-soil mixture in the conveying area. To identify optimal linear velocity of second-stage lifting chain, that acted as one of the orthogonal test factors. During the trial, three levels of the linear velocity of the second-stage lifting chain were set to 0.75 m/s, 0.99 m/s, and 1.23 m/s, respectively.
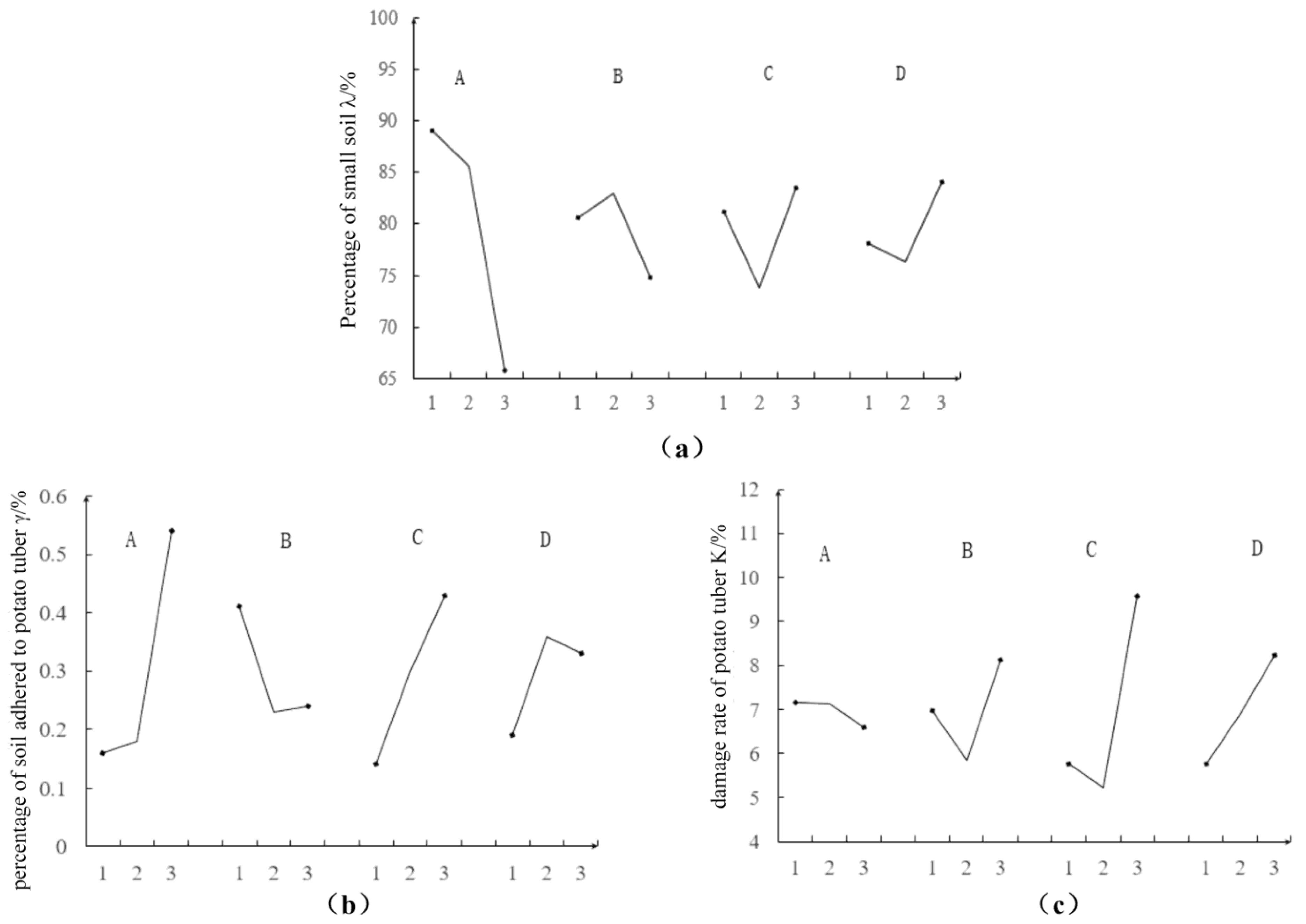
4.4.2. Analysis of Orthogonal Test Results
Range Analysis
Analysis of Variance
Regression Model
Parameter Optimization and Field Verification
5. Discussion and Conclusions
- (1)
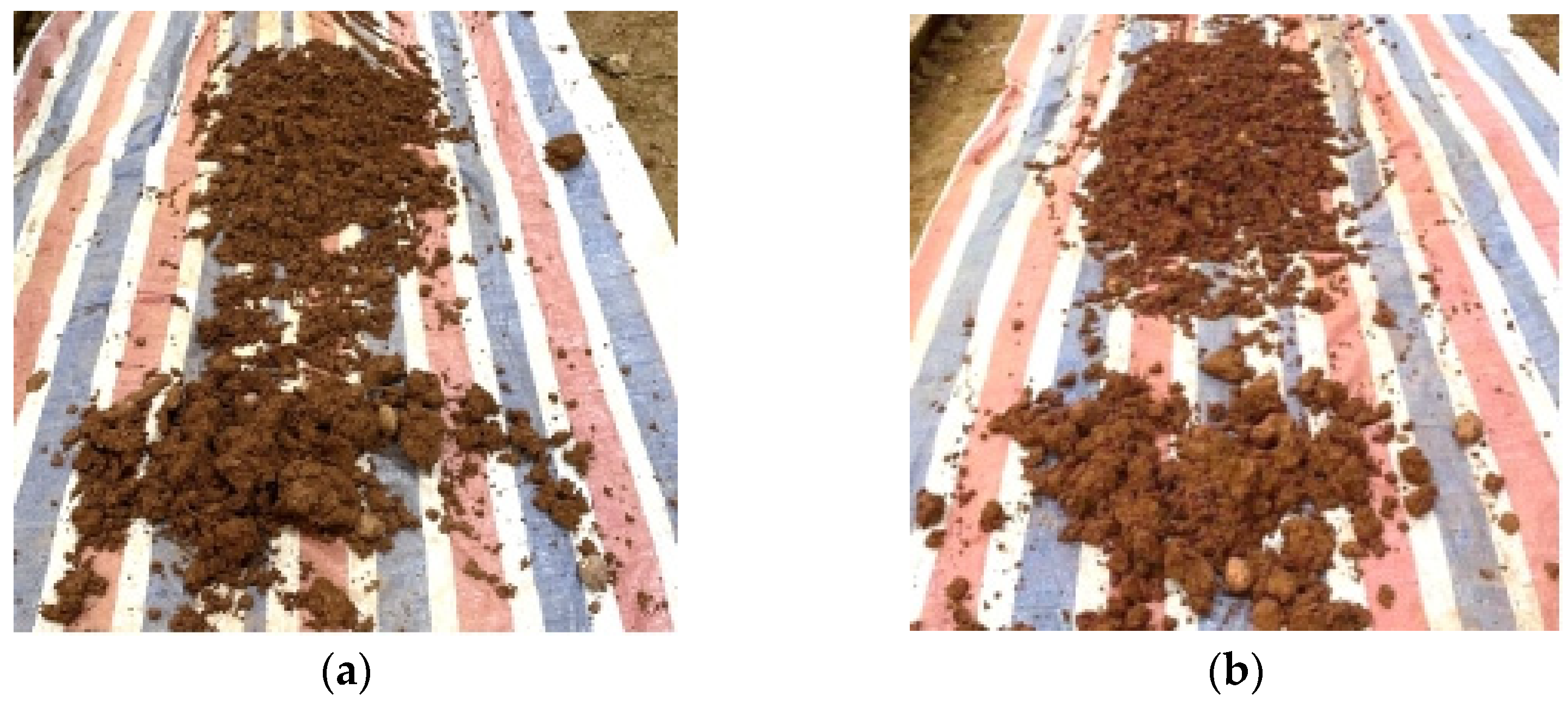
- The application of the soil-crushing mechanism with toothed roller improved the separation effect, whereas it caused more potato tuber damage.
- (2)
- The optimal run parameters of the potato-soil separation device included the rotational speed of the soil-crushing mechanism of 84.18 r/min; linear velocity of second-stage lifting chain of 0.75 m/s and inclination angle of lifting chain of 15.87°.
- (3)
- As revealed from the result of field experiments, the visible potato rate took up 94.31%, the damage rate of potato was 0.89%, which indicated that the new type of potato harvester proposed in this paper can meet the requirement of harvesting potato in winter idle paddy fields in south of China, and provide equipment support for potato harvest under sticky soils condition.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Jian, M.; Luo, Q.; Gao, M. Potato Development Trends, Regional Patterns and Yield Increase Potential in Southern Winter Cropping District. Chin. J. Agric. Resour. Reg. Plan. 2012, 3, 73–79. [Google Scholar]
- Jiang, L.; Ma, X.; Wu, T.; Chen, X.; Sun, G.; Tan, Y.; Lu, F.; Chen, G. Application Status and Research Prospect of Southern Winter Planting Potato Harvesting Machine. J. Agric. Mech. Res. 2016, 7, 163–268. [Google Scholar] [CrossRef]
- Al-Mallahi, A.; Kataoka, T.; Okamoto, H.; Shibata, Y. Detection of Potato Tubers Using An Ultraviolet Imaging-Based Machine Vision System. Biosyst. Eng. 2010, 105, 257–265. [Google Scholar] [CrossRef]
- Bentini, M.; Caprara, C.; Martelli, R. Harvesting Damage to Potato Tubers by Analysis of Impacts recorded with an Instrumented Sphere. Biosyst. Eng. 2006, 94, 75–85. [Google Scholar] [CrossRef]
- Bulgakov, V.; Ivanovs, S.; Adamchuk, V.; Ihnatiev, Y. Investigation of The Influence of The Parameters of The Experimental Spiral Potato Heap Separator on The Quality of Work. Agron. Res. 2017, 15, 44–54. [Google Scholar]
- Kai, C.; Yanyu, G.; Luqiang, Y.; Yuqing, Z. Design and Simulation Analysis of Vibrating Shovel Potato Harvester. J. Agric. Mech. Res. 2018, 10, 44–50. [Google Scholar] [CrossRef]
- Natenadze, N. The Design and Theoretical Justification of A Vibratory Digger Shovel. Mech. Agric. Conserv. Resour. 2016, 62, 9–11. [Google Scholar]
- Li, J.; Jiang, X.; Ma, Y.; Tong, J.; Hu, B. Bionic Design of a Potato Digging Shovel with Drag Reduction Based on the Discrete Element Method (DEM) in Clay Soil. Appl. Sci. 2020, 10, 7096. [Google Scholar] [CrossRef]
- Cui, G.; Ma, Y.; Yang, D.; Jia, J.; Li, Y. Research Situation of Bionic Resistance Reducing Technology about Potato Digging Shovel. Trans. Chin. Soc. Agric. Eng. 2019, 9, 19–22. [Google Scholar]
- Kalinin, A.; Teplinsky, I.; Ruzhev, V. Improvement of Digging Shares of Root Harvesting Machines Based on Rheological Model of Soil State. In Proceedings of the Engineering for Rural Development, Jelgava, Latvia, 26–28 May 2021; pp. 1051–1057. [Google Scholar]
- Salem, A.E.; Wang, H.; Gao, Y.; Zha, X.; Abdeen, M.A.; Zhang, G. Effect of Biomimetic Surface Geometry, Soil Texture, and Soil Moisture Content on the Drag Force of Soil-Touching Parts. Appl. Sci. 2021, 11, 8927. [Google Scholar] [CrossRef]
- Wei, Z.C.; Li, H.W.; Sun, C.Z.; Su, G.; Li, X. Experiments and Analysis of a Conveying Device for Soil Separation and Clod-Crushing for a Potato Harvester. Appl. Eng. Agric. 2019, 35, 987–996. [Google Scholar] [CrossRef]
- Arafa, G. Some Factors Affecting the Damage of Potato Tubers During Harvest. Misr J. Agric. Eng. 2019, 36, 753–772. [Google Scholar] [CrossRef]
- Ismail, Z.; Amine, E.; El-Shabrawy, T.; Faleih, H. Investigate A Simple Design for Sweet Potato Harvesting. Misr J. Agric. Eng. 2014, 31, 1331–1346. [Google Scholar] [CrossRef]
- Xie, S.; Wang, C.; Deng, W. Displacement Analysis of Potato Relative to Separation Sieve and Separation Sieve Performance Test. J. Agric. Sci. Technol. 2019, 21, 71–81. [Google Scholar] [CrossRef]
- Xie, S.; Wang, C.; Deng, W.; Li, X.; Qi, S. Separating Mechanism Analysis and Parameter Optimization Experiment of Swing Separation Sieve for Potato and Soil Mixture. Trans. Chin. Soc. Agric. Mach. 2017, 48, 156–164. [Google Scholar] [CrossRef]
- Wei, Z.; Li, H.; Sun, C.; Li, X.; Liu, W.; Su, G.; Wang, F. Improvement of Potato Harvester with Two Segment of Vibration and Wave Separation. Trans. Chin. Soc. Agric. Eng. 2018, 34, 42–52. [Google Scholar] [CrossRef]
- Olt, J.; Adamchuk, V.; Korniushyn, V.; Melnik, V.; Kaletnik, H.; Ihnatiev, Y.; Ilves, R. Research into The Parameters of A Potato Harvester’s Potato Heap Distributor, And The Justification of Those Parameters. J. Agric. Sci. 2021, 32, 92–99. [Google Scholar] [CrossRef]
- Wei, Z.; Li, H.; Mao, Y.; Sun, C.; Li, X.; Liu, W.; Su, G. Experiment and Analysis of Potato-Soil Separation Based on Impact Recording Technology. Int. J. Agric. Biol. Eng. 2019, 12, 71–80. [Google Scholar] [CrossRef]
- Shi, L.; Wu, J.; Zhao, W.; Sun, W.; Wang, D.; Li, H.; Liu, Q. Design and Experiment on Potato Digger of Disc Ce-Grate Type. Trans. Chin. Soc. Agric. Eng. 2012, 28, 15–21. [Google Scholar] [CrossRef]
- Yang, R.; Yang, H.; Shang, S.; Ni, Z.; Liu, Z.; Guo, D. Design and Experiment of Vertical Circular Separating and Conveying Device for Potato Combine Harvester. Trans. Chin. Soc. Agric. Eng. 2018, 34, 10–18. [Google Scholar] [CrossRef]
- Zizeng, L.; Jinlin, J.; Changling, Z.; Qun, Y.; Xiuxu, S. Design and Experimental Study on The Conveying Chain Soil Cleaning Device of Potato Harvester. J. Agric. Mech. Res. 2016, 2, 123–127. [Google Scholar] [CrossRef]
- Kostenko, M.Y.; Ruzimurodov, A.; Byshov, D.; Golakhov, A.; Yakutin, N. Study of Soil Separation at A Potato Chain with A Cross Rotating Agitator. In IOP Conference Series: Earth and Environmental Science, January 2020; IOP Publishing: Bristol, UK, 2020; Volume 422, p. 012032. [Google Scholar] [CrossRef]
- Wu, J.; Li, H.; Sun, W.; Huang, X.; Sun, B. Design of Potato Digger in Poke Finger’s Wheel Type. Trans. Chin. Soc. Agric. Mach. 2010, 41, 76–79. [Google Scholar] [CrossRef]
- Lü, J.; Sun, H.; Dui, H.; Peng, M.; Yu, J. Design and Experiment on Conveyor Separation Device of Potato Digger Under Heavy Soil Condition. Trans. Chin. Soc. Agric. Mach. 2017, 48, 146–155. [Google Scholar] [CrossRef]
- Gao, G.; Xie, H. Numerical Analysis and Simulation of Potato Soil Separation Mechanism Based on EDEM. J. Agric. Mech. Res. 2019, 1, 15–21. [Google Scholar] [CrossRef]
- Zhang, Z.; Wang, H.; Li, Y.; Yang, X.; Ibrahim, I.; Zhang, Z. Design and Experiment of Multi-stage Separation Buffer Potato Harvester. Agric. Mech. J. 2021, 52, 96–109. [Google Scholar]
- Hevko, R.; Tkachenko, I.; Synii, S.; Flonts, I. Development of Design and Investigation of Operation Processes of Small-Sclale Root Crop and Potato Harvesters. INMATEH-Agric. Eng. 2016, 49, 53–60. [Google Scholar]
- McRae, D.; Hutchison, P.; Carruthers, J. Sieving Control and Horizontal Agitation of Potato Harvester Chains. Trans. ASAE 1986, 29, 366–0369. [Google Scholar] [CrossRef]
- Zhbanov, N.; Byshow, N.; Kostenko, N.; Rembalovich, G.; Kostenko, M. Improvement of The Working Bodies of The Harvesting Machines by Means of The Use of Composite Materials. In Proceedings of the BIO Web of Conferences, Voronezh, Russian Federation, 17–18 October 2019; EDP Sciences: Les Ulis, France, 2020; Volume 17, p. 00191. [Google Scholar] [CrossRef] [Green Version]
- Jia, H.; Ji, W.; Han, W.; Tan, H.; Ma, C. Optimization Experiment of Structure Parameters of Rototilling and Stubble Breaking Universal Blade. Trans. Chin. Soc. Agric. Mach. 2009, 40, 45–50. [Google Scholar]
- Jia, H.; Chen, Z.; Hong, G. Study on Working Principle of Rotary Tillage and Stubble Cutting and Design of Universal Knife Roller. Trans. Chin. Soc. Agric. Mach. 2000, 4, 29–32. [Google Scholar]
- Li, Y.; Wang, J.; Tang, J.; Wang, E.; Hu, Q. Optimum Planting Date and Cultivar Maturity to Optimize Potato Yield and Yield Stability in North China. Field Crop. Res. 2021, 269, 108179. [Google Scholar] [CrossRef]
- Xu, G.; Luo, W.; Li, H.; Xu, Y.; Ji, R.; Tang, H. Plastic Film and Rice Straw Mulching: Effects on Yield and Quality of Winter Potato and Control Efficiency of Weed. Chin. Agric. Sci. Bull. 2021, 37, 13–18. [Google Scholar]
- Zhou, J.; Yang, S.; Li, M.; Chen, Z.; Zhou, J.; Gao, Z.; Chen, J. Design and Experiment of A Self-Propelled Crawler-Potato Harvester for Hilly and Mountainous Areas. INMATEH-Agric. Eng. 2021, 64, 151–158. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Moisture Content /% | Volume /cm3 | Soil Mass /kg | Potato Mass /g | Root Mass /g |
|---|---|---|---|---|
| 18 | 30,000 | 35.85 (18% moisture content) | 613 | 10 |
| 23 | 30,000 | 38.18 (23% moisture content) | 613 | 10 |
| 28 | 30,000 | 40.83 (28% moisture content) | 613 | 10 |
| Levels | Factors | |||
|---|---|---|---|---|
| A | B | C | D | |
| Moisture Content /% | Rotational Speed of Soil-Crushing Mechanism /r·min−1 | Linear Velocity of Second-Stage Lifting Chain /m·s−1 | Inclination Angle of Lifting Chain /° | |
| 1 2 3 | 18 23 28 | 70 122 175 | 0.75 0.96 1.23 | 15 20 25 |
| Experimental Number | Experimental Factor | Assessment Index | ||||||
|---|---|---|---|---|---|---|---|---|
| A | B | C | D | Percentage of Small Soil λ/% | Percentage of Soil Adhered to Potato Tuber γ/% | Damage Rate of Potato Tuber K/% | ||
| 1 | 18 | 70 | 0.75 | 15 | 90.46 | 0.02 | 5.1 | |
| 2 | 18 | 122 | 0.96 | 20 | 83.79 | 0.17 | 4.2 | |
| 3 | 18 | 175 | 1.23 | 25 | 92.92 | 0.28 | 12.18 | |
| 4 | 23 | 70 | 0.96 | 25 | 83.67 | 0.34 | 6.67 | |
| 5 | 23 | 122 | 1.23 | 15 | 89.61 | 0.15 | 7.40 | |
| 6 | 23 | 175 | 0.75 | 20 | 77.44 | 0.04 | 7.35 | |
| 7 | 28 | 70 | 1.23 | 20 | 67.86 | 0.86 | 9.1 | |
| 8 | 28 | 122 | 0.75 | 25 | 75.44 | 0.36 | 5.88 | |
| 9 | 28 | 175 | 0.96 | 15 | 54.08 | 0.40 | 4.82 | |
| λ/% | K1 | 89.06 | 80.66 | 81.11 | 78.05 | |||
| K2 | 85.55 | 82.95 | 73.85 | 76.36 | ||||
| K3 | 65.79 | 74.81 | 83.46 | 84.01 | ||||
| R | 23.26 | 8.13 | 9.62 | 7.65 | ||||
| Optimal Lever | A1 | B2 | C3 | D3 | ||||
| Sequences | A>C>B>D | |||||||
| γ/% | K1 | 0.16 | 0.41 | 0.14 | 0.19 | |||
| K2 | 0.18 | 0.23 | 0.30 | 0.36 | ||||
| K3 | 0.54 | 0.24 | 0.43 | 0.33 | ||||
| R | 0.38 | 0.18 | 0.29 | 0.17 | ||||
| Optimal Lever | A1 | B2 | C1 | D1 | ||||
| Sequences | A>C>B>D | |||||||
| K/% | K1 | 7.16 | 6.96 | 5.77 | 5.77 | |||
| K2 | 7.14 | 5.83 | 5.23 | 6.88 | ||||
| K3 | 6.60 | 8.12 | 9.56 | 8.24 | ||||
| R | 0.56 | 2.29 | 4.33 | 2.47 | ||||
| Optimal Lever | A3 | B2 | C2 | D1 | ||||
| Sequences | C>D>B>A | |||||||
| Dependent Variable | Variance Source | Sum of Square | Degree of Freedom | Mean Square | F Value | P Value |
|---|---|---|---|---|---|---|
| Percentage of small soil λ/% | A | 887.378 | 2 | 443.689 | 9.164 | * |
| B | 105.587 | 2 | 52.794 | 1.090 | △ | |
| C | 150.807 | 2 | 75.404 | 1.557 | △ | |
| Residual | 96.838 | 2 | 48.419 | |||
| Cor Total | 1240.610 | 8 | ||||
| Percentage of soil adhered to potato tuber γ/% | A | 0.279 | 2 | 0.140 | 5.899 | ⊙ |
| B | 0.060 | 2 | 0.030 | 1.275 | △ | |
| C | 0.127 | 2 | 0.063 | 2.678 | △ | |
| Residual | 0.047 | 2 | 0.024 | |||
| Cor Total | 0.514 | 8 | ||||
| Damage rate of potato tuber K/% | B | 7.867 | 2 | 3.933 | 12.990 | * |
| C | 31.426 | 2 | 15.713 | 51.892 | ** | |
| D | 9.183 | 2 | 4.591 | 15.163 | * | |
| Residual | 0.606 | 2 | 0.303 | * | ||
| Cor Total | 49.081 | 8 | △ |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, B.; Huang, T.; Qiu, X.; Zuo, T.; Wang, X.; Xie, F. Design and Experimental Study of Potato-Soil Separation Device for Sticky Soils Condition. Appl. Sci. 2021, 11, 10959. https://doi.org/10.3390/app112210959
Wu B, Huang T, Qiu X, Zuo T, Wang X, Xie F. Design and Experimental Study of Potato-Soil Separation Device for Sticky Soils Condition. Applied Sciences. 2021; 11(22):10959. https://doi.org/10.3390/app112210959
Chicago/Turabian StyleWu, Bei, Tianci Huang, Xuanxuan Qiu, Tianlin Zuo, Xiushan Wang, and Fangping Xie. 2021. "Design and Experimental Study of Potato-Soil Separation Device for Sticky Soils Condition" Applied Sciences 11, no. 22: 10959. https://doi.org/10.3390/app112210959
APA StyleWu, B., Huang, T., Qiu, X., Zuo, T., Wang, X., & Xie, F. (2021). Design and Experimental Study of Potato-Soil Separation Device for Sticky Soils Condition. Applied Sciences, 11(22), 10959. https://doi.org/10.3390/app112210959