
Demodulation of EM Telemetry Data Using Fuzzy Wavelet Neural Network with Logistic Response


Abstract
:1. Introduction
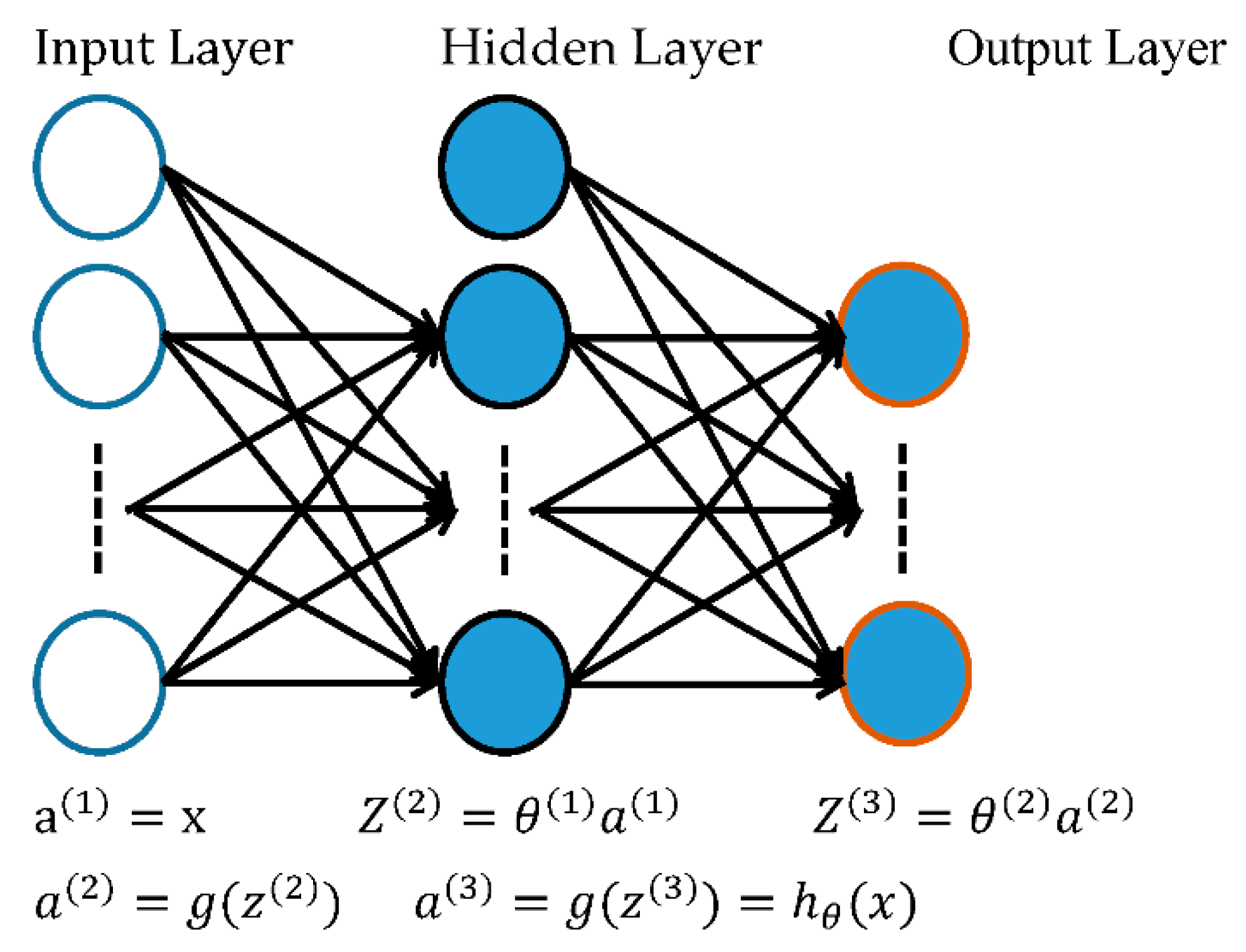
2. ANN Architecture
3. Methodology
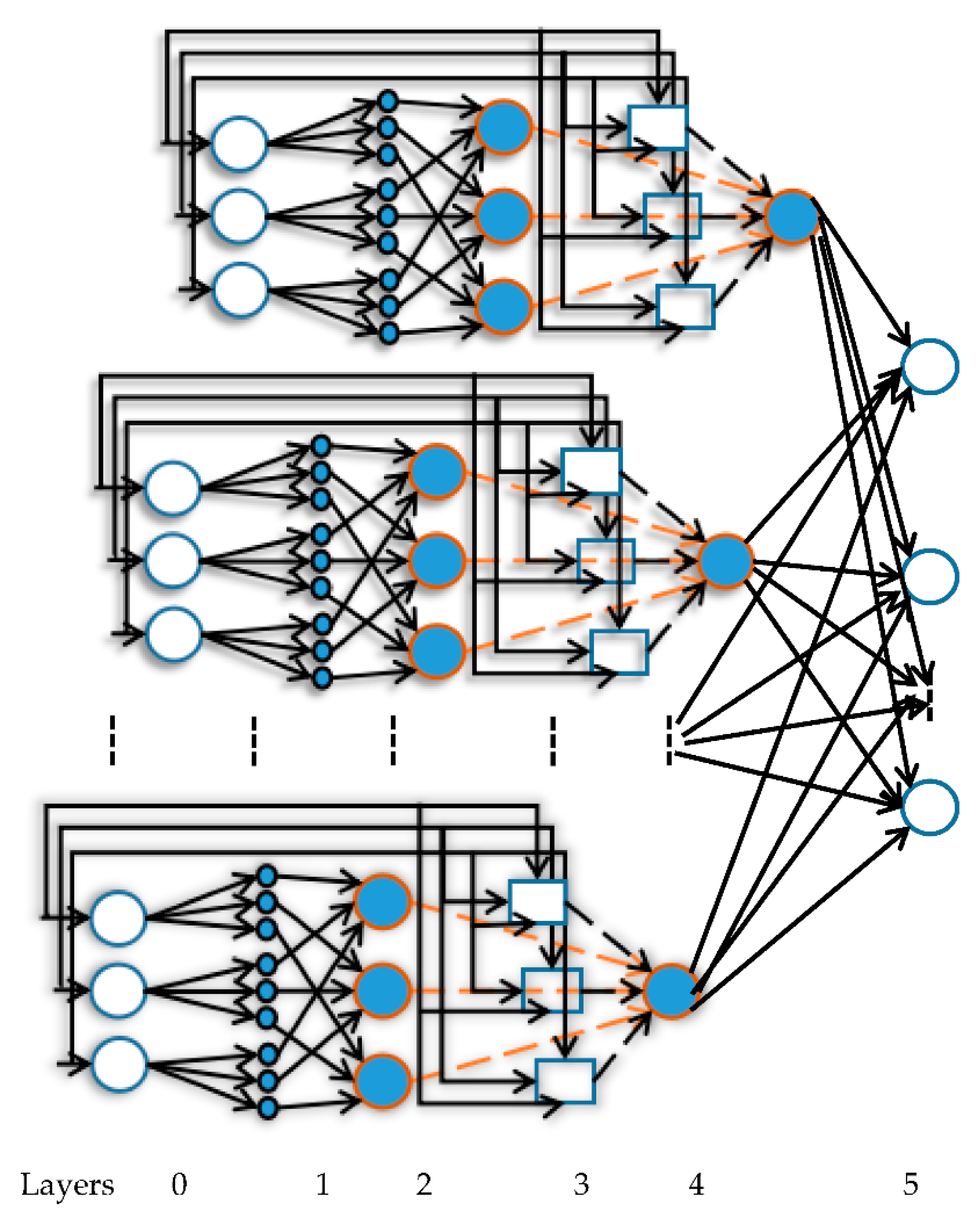
3.1. Structure of Fuzzy Wavelet Neural Networks
3.2. Theory
3.3. Defining the Input
3.4. Initializing of Parameters
3.5. Training a Fuzzy Wavelet Network with Backpropagation
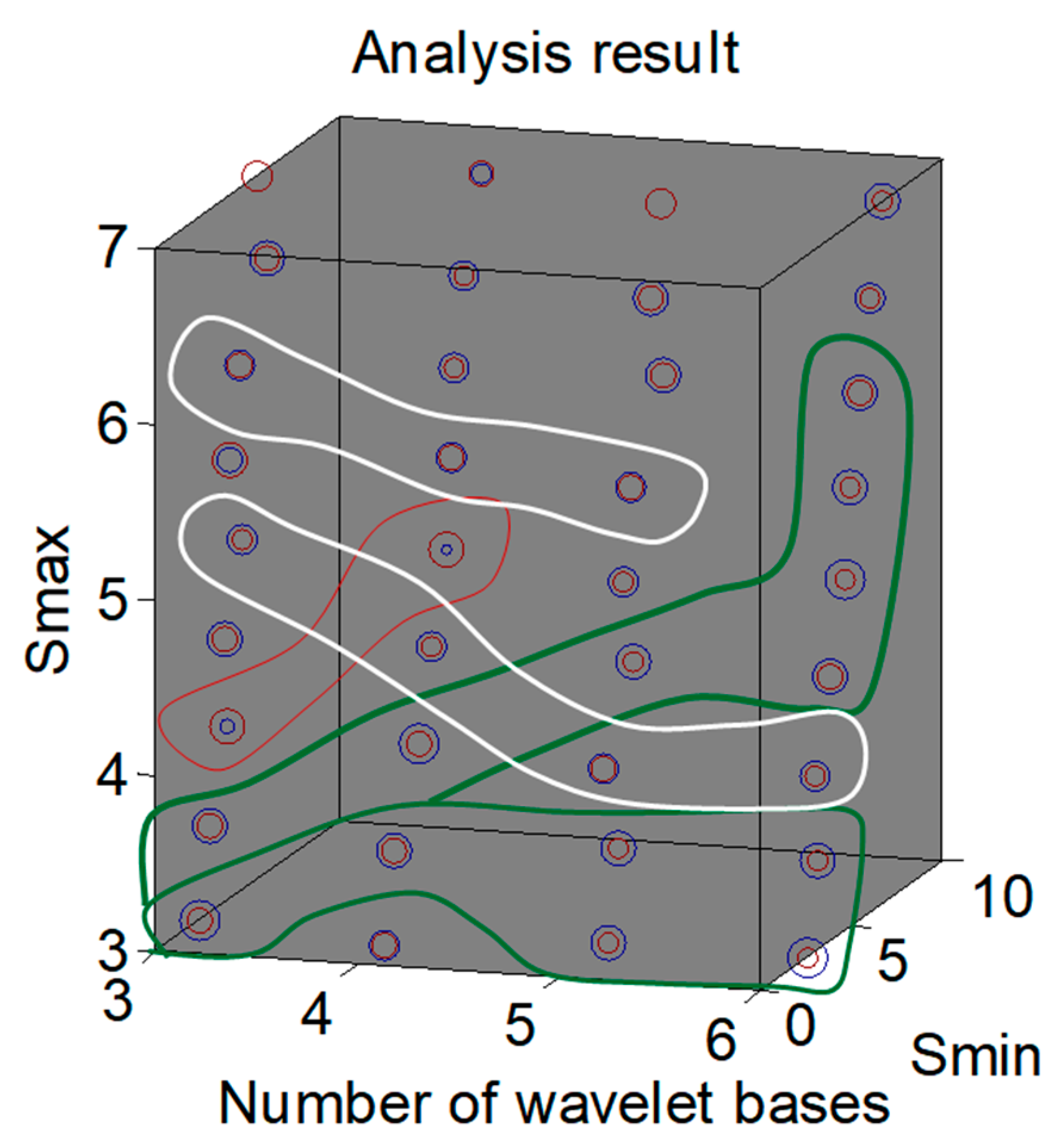
3.6. Estimating the Number of Wavelet Bases and the Pre-Selected Range for
4. Examples
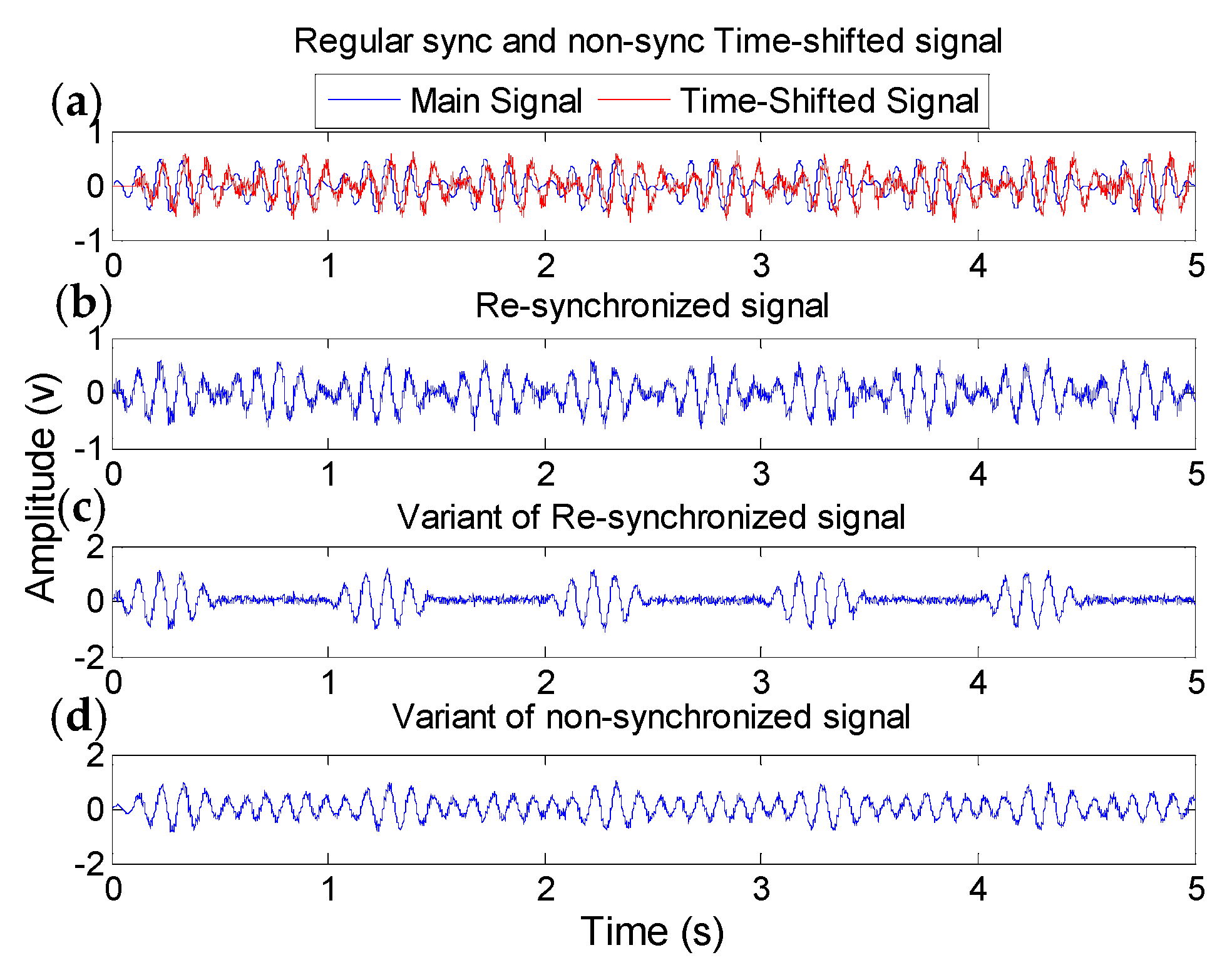
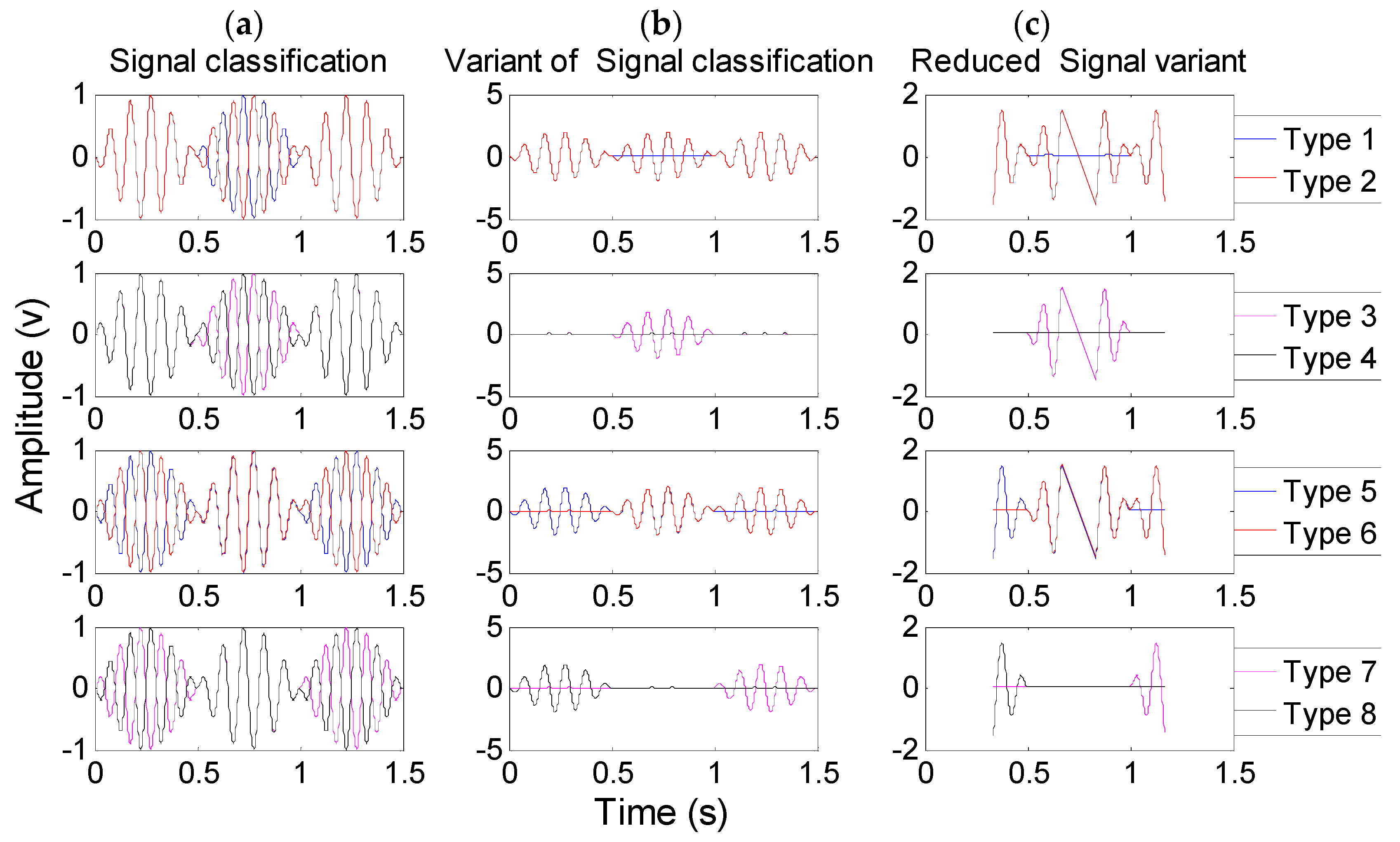
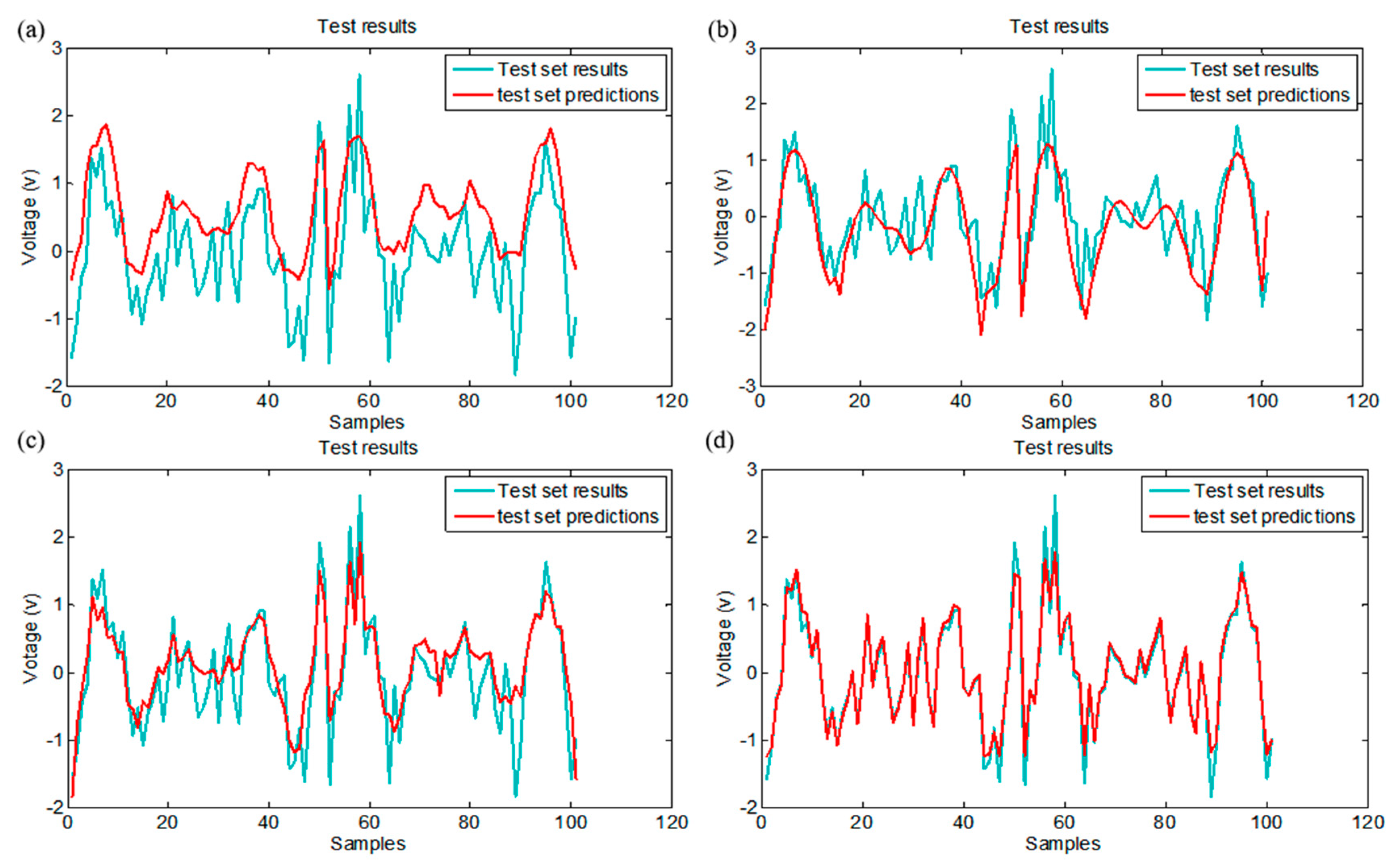
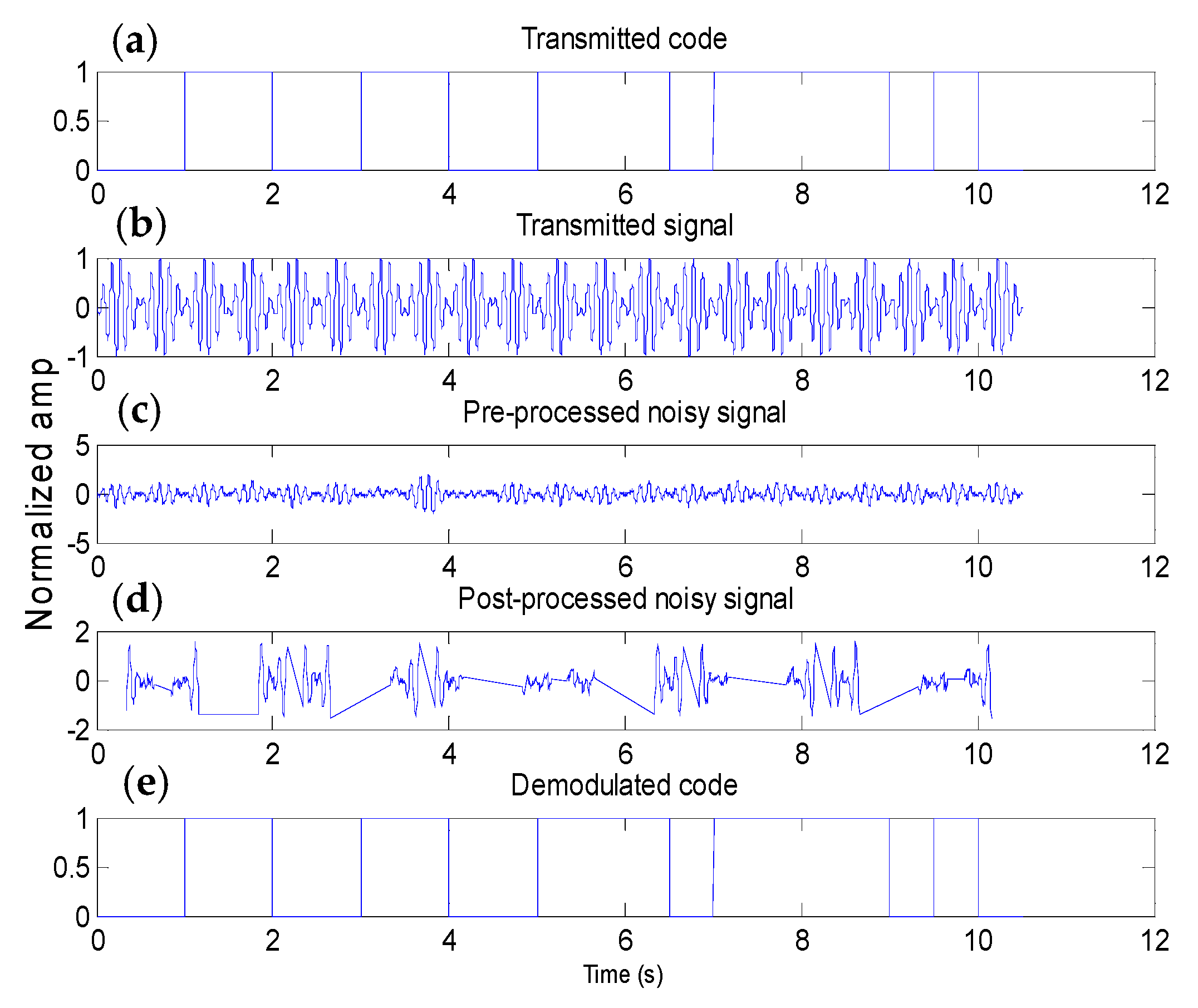
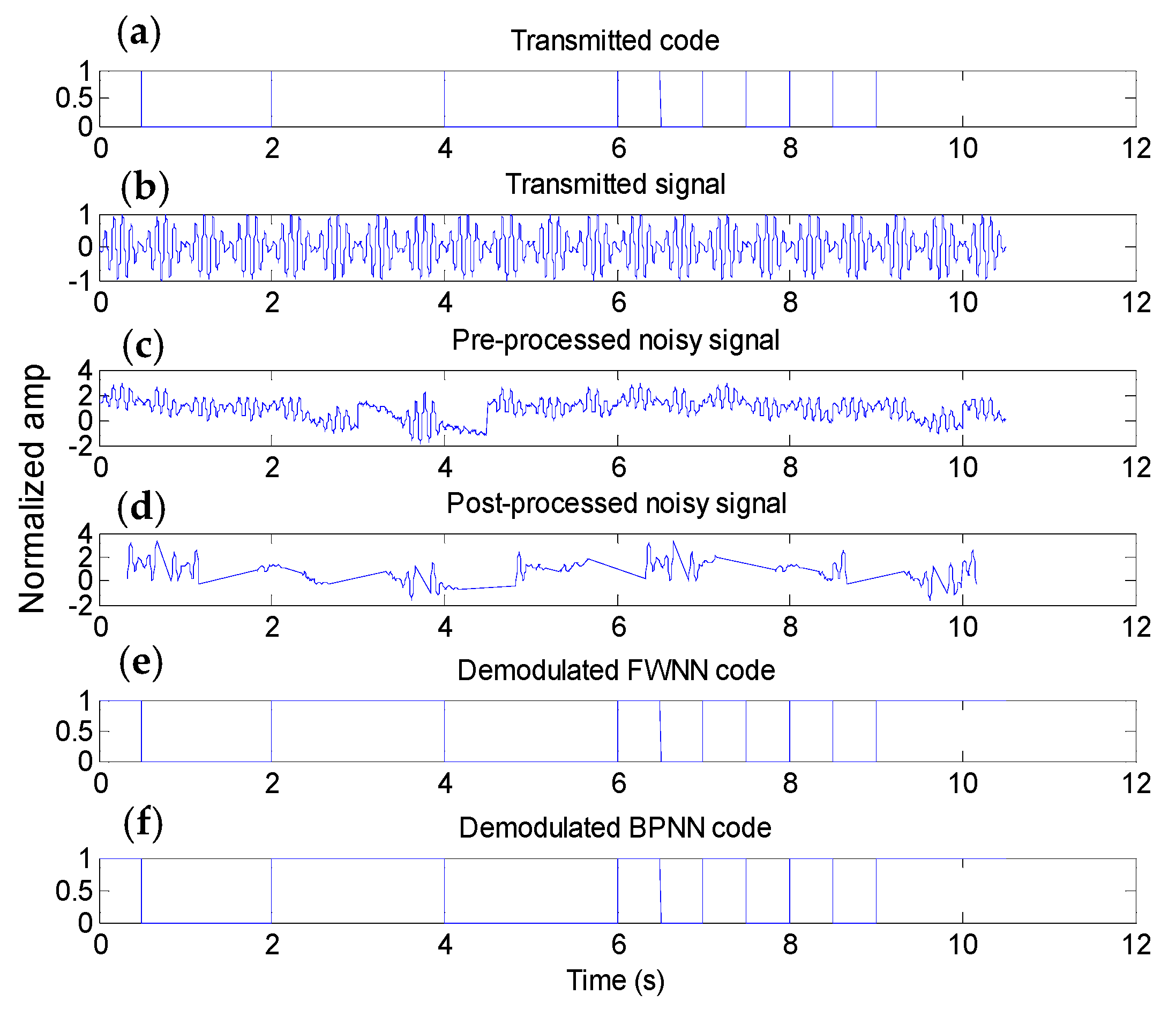
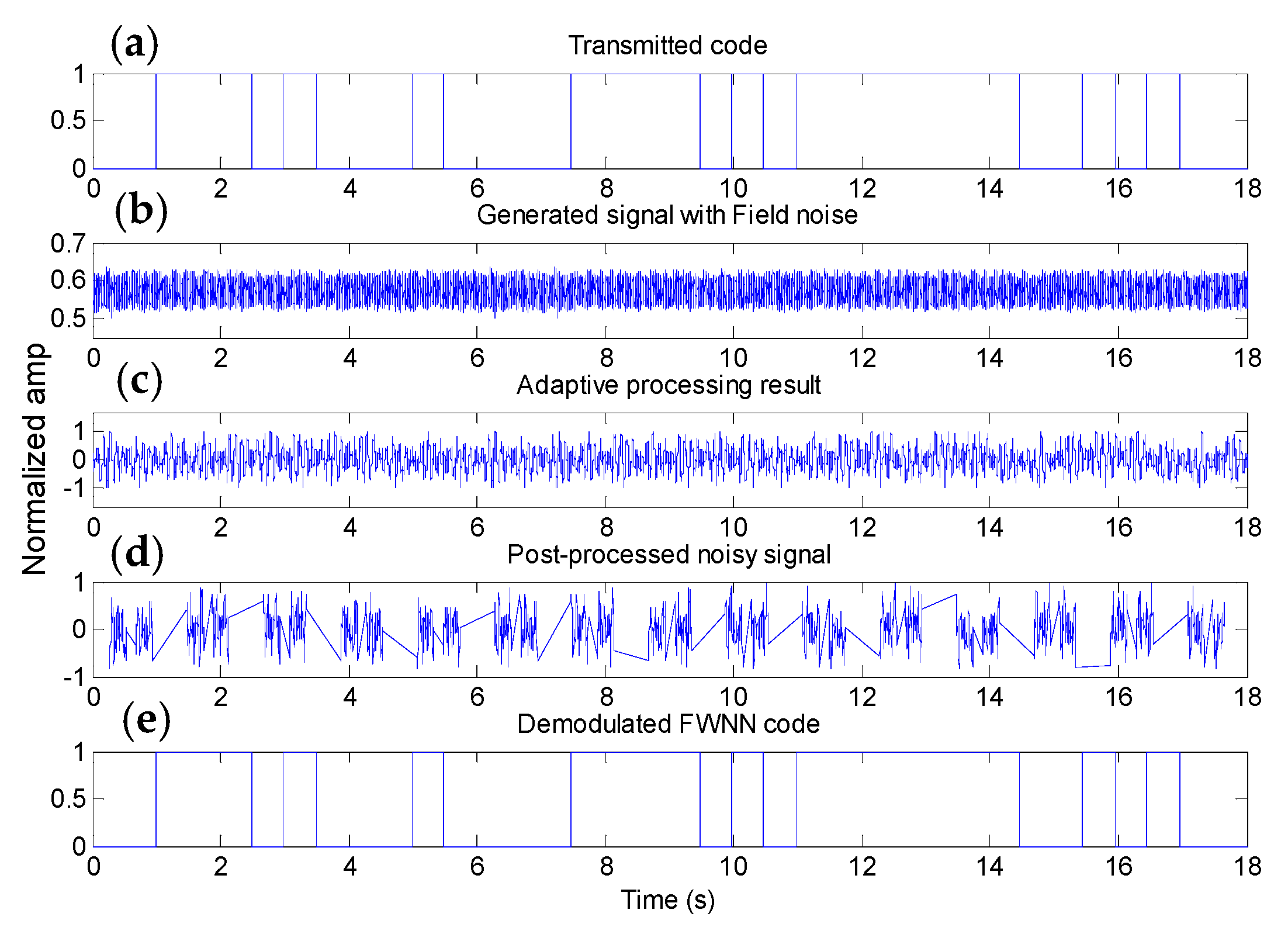
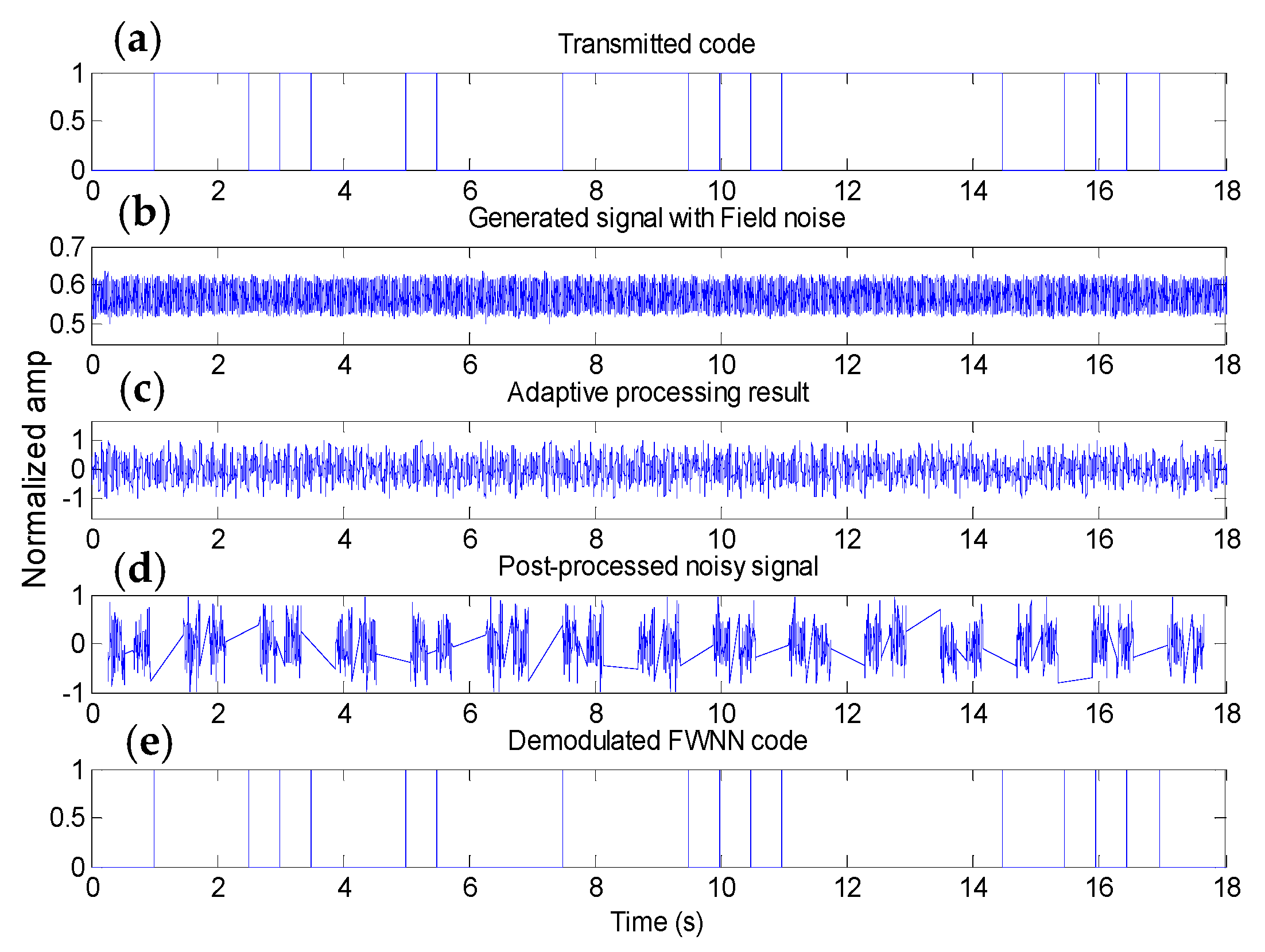
4.1. Comparison of the FWNN with BP Using Synthetic Data with Three Noise Variants
4.2. Comparison of the FWNN with BP Using Pseudo-Synthetic Data
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- IEEE. Fifty Years of Signal Processing: The IEEE Signal Processing Society and its Technologies, 1948–1998. Available online: https://signalprocessingsociety.org/our-story/society-history (accessed on 1 November 2020).
- Suh, A.E. Noise Cancellation in Electromagnetic Measurement While Drilling Using Spectral Subtraction. Master’s Thesis, California Polytechnic State University, San Luis Obispo, CA, USA, 2004. [Google Scholar]
- Lu, C.D.; Du, H.B.; Wang, J.H.; Zhang, C.A. Design of EM-MWD Signal Receiver Circuit Based on STM32. Chin. J. Eng. Geophys. 2015, 12, 423–427. [Google Scholar]
- Long, L.; Chen, Q.; Liu, F. Research on eliminating interference signal algorithm of EM-MWD. Chin. J. Sci. Instrum. 2014, 35, 2144–2152. [Google Scholar]
- Whitacre, T.P. A Neural Network Receiver for EM-MWD Communication. Master’s Thesis, California Polytechnic State University, San Luis Obispo, CA, USA, 2011. [Google Scholar]
- Li, F.K.; Yang, Z.Q.; Fan, Y.H.; Hao, C.; Zhu, G.; Jin, Y.; Fang, J.; Li, T. Multiple Combinational Algorithm to Adaptively Track and Detect Measurement While Drilling Electromagnetic Wave Signal. In Proceedings of the 12th International Symposium on Antennas, Propagation and EM Theory (ISAPE), Hangzhou, China, 3–6 December 2018; pp. 1–5. Available online: https://ieeexplore.ieee.xilesou.top/abstract/document/8634120 (accessed on 13 January 2020).
- Abiodun, O.I.; Jantan, A.; Omolara, A.E.; Dada, K.V.; Mohamed, N.A.; Arshad, H. State-of-the-art in artificial neural network applications: A survey. Heliyon 2018, 4, e00938. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, H.; Zhang, Z.; Liu, Z. Application of Artificial Neural Networks for Catalysis: A Review. Catalysts 2017, 7, 306. [Google Scholar] [CrossRef]
- Farhad, E. Extremely Low Frequency (Elf) Signal Processing for Electric Borehole Telemetry. Ph.D. Thesis, Oklahoma State University, Stillwater, OK, USA, 1992. [Google Scholar]
- Fernandes, M.A.C.; Neto, A.D.D.; Bezerra, J.B. A Neural Network Model Applied to the Detection of Digital Signals; IEEE: New York, NY, USA, 1998; pp. 279–283. [Google Scholar] [CrossRef]
- White, M.A. Adaptive Signaling for Sub-Surface Telemetry Systems. Ph.D. Thesis, California Polytechnic, San Luis Obispo, CA, USA, 2004. [Google Scholar]
- Fayemi, O.; Di, Q.; Zhen, Q.; Wang, Y.L. Adaptive Processing for EM Telemetry Signal Recovery: Field Data from Sichuan Province. Energies 2020, 13, 5873. [Google Scholar] [CrossRef]
- Al-Allaf, O.; Abdulqader, S. Nonlinear Autoregressive neural network for estimation soil temperature: A comparison of different optimization neural network algorithms. Ubiquitous Comput. Commun. J. (UBICC) 2011, 6, 43–51. [Google Scholar]
- Haykin, S. Neural Networks: A Comprehensive Foundation, 2nd ed.; Pearson Prentice Hall Inc.: Delhi, India, 2005. [Google Scholar]
- Ho, W.C.D.; Zhang, P.-A.; Xu, J. Fuzzy wavelet networks for function learning. IEEE Trans. Fuzzy Syst. 2001, 9, 200–211. [Google Scholar] [CrossRef]
- Alexandridis, A.K.; Zapranis, A.D. Wavelet neural networks: A practical guide. Neural Netw. 2013, 42, 1–27. [Google Scholar] [CrossRef]
- Asadi, S.; Abdullah, R.; Safaei, M.; Nazir, S. An Integrated SEM-Neural Network Approach for Predicting Determinants of Adoption of Wearable Healthcare Devices. Mob. Inf. Syst. 2019, 2019, 8026042. [Google Scholar] [CrossRef]
- Zhang, Q. Using wavelet network in nonparametric estimation. IEEE Trans. Neural Netw. 1997, 8, 227–236. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Q.; Benveniste, A. Wavelet networks. IEEE Trans. Neural Netw. 1992, 3, 889–898. [Google Scholar] [CrossRef]
- Zhang, J.; Walter, G.; Miao, Y.; Lee, W.N.W. Wavelet neural networks for function learning. IEEE Trans. Signal. Process. 1995, 43, 1485–1497. [Google Scholar] [CrossRef]
- Li, S.-T.; Chen, S.-C. Function approximation using robust wavelet neural networks. In Proceedings of the 14th IEEE International Conference on Tools with Artificial Intelligence (ICTAI 2002), Washington, DC, USA, 4–6 November 2002. [Google Scholar] [CrossRef] [Green Version]
- Huang, Z.; Wu, R.; Yi, X.; Liu, H.; Cai, J.; Niu, G.; Huang, M.; Ying, G. A Novel Model with GA Evolving FWNN for Effluent Quality and Biogas Production Forecast in a Full-Scale Anaerobic Wastewater Treatment Process. Complexity 2019, 2019, 2468189. [Google Scholar] [CrossRef]
- Billings, S.A.; Wei, H.L. A new class of wavelet networks for nonlinear system identification. IEEE Trans. Neural Netw. 2005, 16, 862–874. [Google Scholar] [CrossRef] [Green Version]
- Alonge, F.; D’Ippolito, F.; Mantione, S.; Raimondi, F.M. A new method for optimal synthesis of wavelet-based neural networks suitable for identification purposes. In Proceedings of the 14th IFAC World Congress, Beijing, China, 5–9 July 1999; pp. 445–450. [Google Scholar]
- Li, X.; Wang, Z.; Xu, L.; Liu, J. Combined Construction of Wavelet Neural Networks for Nonlinear System Modeling. IFAC Proc. Vol. 1999, 32, 5153–5158. [Google Scholar] [CrossRef]
- Chen, J.; Bruns, D.D. WaveARX Neural Network Development for System Identification Using a Systematic Design Synthesis. Ind. Eng. Chem. Res. 1995, 34, 4420–4435. [Google Scholar] [CrossRef]
- Narendra, K.; Parthasarathy, K. Adaptive identification and control of dynamical systems using neural networks. In Proceedings of the 28th IEEE Conference on Decision and Control, Tampa, FL, USA, 13–15 December 1989. [Google Scholar] [CrossRef]
- Jang, J.; Sun, C.-T.; Mizutani, E. Neuro-Fuzzy and Soft Computing-A Computational Approach to Learning and Machine Intelligence [Book Review]. IEEE Trans. Autom. Control 1997, 42, 1482–1484. [Google Scholar] [CrossRef]
- Gorodnichy, D.O. Associative neural networks as means for low-resolution video-based recognition. In Proceedings of the 2005 IEEE International Joint Conference on Neural Networks, Montreal, QC, Canada, 31 July–4 August 2005. NRC 48217. [Google Scholar] [CrossRef] [Green Version]
- Oussar, Y.; Dreyfus, G. Initialization by selection for wavelet network training. Neurocomputing 2000, 34, 131–143. [Google Scholar] [CrossRef] [Green Version]
- Oussar, Y.; Rivals, I.; Personnaz, L.; Dreyfus, G. Training wavelet networks for nonlinear dynamic input–output modeling. Neurocomputing 1998, 20, 173–188. [Google Scholar] [CrossRef] [Green Version]
- Linhares, L.L.S.; Fontes, A.I.R.; Martins, A.M.; Araújo, F.; Silveira, L.F.Q. Fuzzy Wavelet Neural Network Using a Correntropy Criterion for Nonlinear System Identification. Math. Probl. Eng. 2015, 2015, 1–12. [Google Scholar] [CrossRef]
- Davanipoor, M.; Zekri, M.; Sheikholeslam, F. Fuzzy Wavelet Neural Network with an Accelerated Hybrid Learning Algorithm. IEEE Trans. Fuzzy Syst. 2011, 20, 463–470. [Google Scholar] [CrossRef]
- Fang, Y.; Chow, T.W.S. Wavelets based neural network for function approximation. In International Symposium on Neural Networks; Springer: Berlin/Heidelberg, Germany, 2006; Volume 3971, pp. 80–85. [Google Scholar] [CrossRef]
- Postalcioglu, S.; Becerikli, Y. Wavelet networks for nonlinear system modeling. Neural Comput. Appl. 2006, 16, 433–441. [Google Scholar] [CrossRef]
- Zhang, Z. Learning algorithm of wavelet network based on sampling theory. Neurocomputing 2007, 71, 244–269. [Google Scholar] [CrossRef]
- Davanipour, M.; Zekri, M.; Sheikholeslam, F.; Poor, M.D. The preference of Fuzzy Wavelet Neural Network to ANFIS in identification of nonlinear dynamic plants with fast local variation. In Proceedings of the 2010 18th Iranian Conference on Electrical Engineering, Isfahan, Iran, 11–13 May 2010; pp. 605–609. [Google Scholar] [CrossRef]
- Sam, L. Seafood-SIMIT. 2020. Available online: https://github.com/Seafood-SIMIT/fwnn-matlab/tree/master/code (accessed on 12 July 2020).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Time (s) | % Accuracy | |||||
|---|---|---|---|---|---|---|---|
| Noise Characteristic | SNR-15 | SNR 1 | SNR-10 | SNR-15 | SNR-1 | SNR-10 | |
| FWNN | AWGN | 0.45 | 0.38 | 0.34 | 93.1 | 100 | 100 |
| Red and blue | 0.42 | 0.42 | 0.44 | 100 | 100 | 100 | |
| Pink and violet | 0.40 | 0.39 | 0.32 | 100 | 98 | 100 | |
| BP | AWGN | 0.12 | 0.19 | 0.15 | 87.5 | 95 | 100 |
| Red and blue | 0.21 | 0.21 | 0.23 | 98.8 | 97.5 | 100 | |
| Pink and violet | 0.15 | 0.15 | 0.14 | 97.5 | 100 | 100 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fayemi, O.; Di, Q.; Zhen, Q.; Liang, P. Demodulation of EM Telemetry Data Using Fuzzy Wavelet Neural Network with Logistic Response. Appl. Sci. 2021, 11, 10877. https://doi.org/10.3390/app112210877
Fayemi O, Di Q, Zhen Q, Liang P. Demodulation of EM Telemetry Data Using Fuzzy Wavelet Neural Network with Logistic Response. Applied Sciences. 2021; 11(22):10877. https://doi.org/10.3390/app112210877
Chicago/Turabian StyleFayemi, Olalekan, Qingyun Di, Qihui Zhen, and Pengfei Liang. 2021. "Demodulation of EM Telemetry Data Using Fuzzy Wavelet Neural Network with Logistic Response" Applied Sciences 11, no. 22: 10877. https://doi.org/10.3390/app112210877
APA StyleFayemi, O., Di, Q., Zhen, Q., & Liang, P. (2021). Demodulation of EM Telemetry Data Using Fuzzy Wavelet Neural Network with Logistic Response. Applied Sciences, 11(22), 10877. https://doi.org/10.3390/app112210877