
Variation in the Polarization Loss Factor in an Unmanned Aerial Vehicle Jamming Link Due to the Attitude Change


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
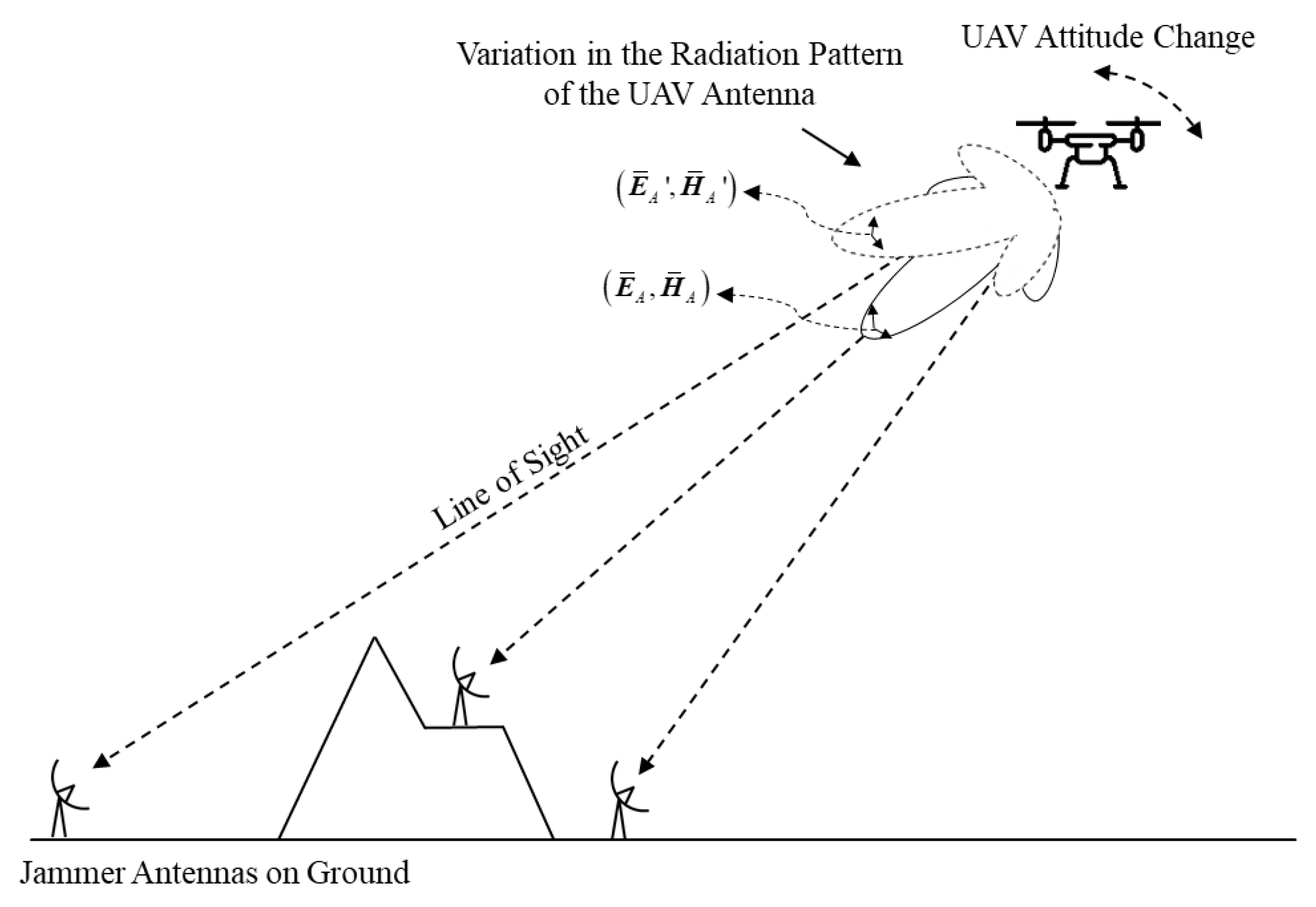
2. Variation in Jamming Power Reception Due to the Attitude Change
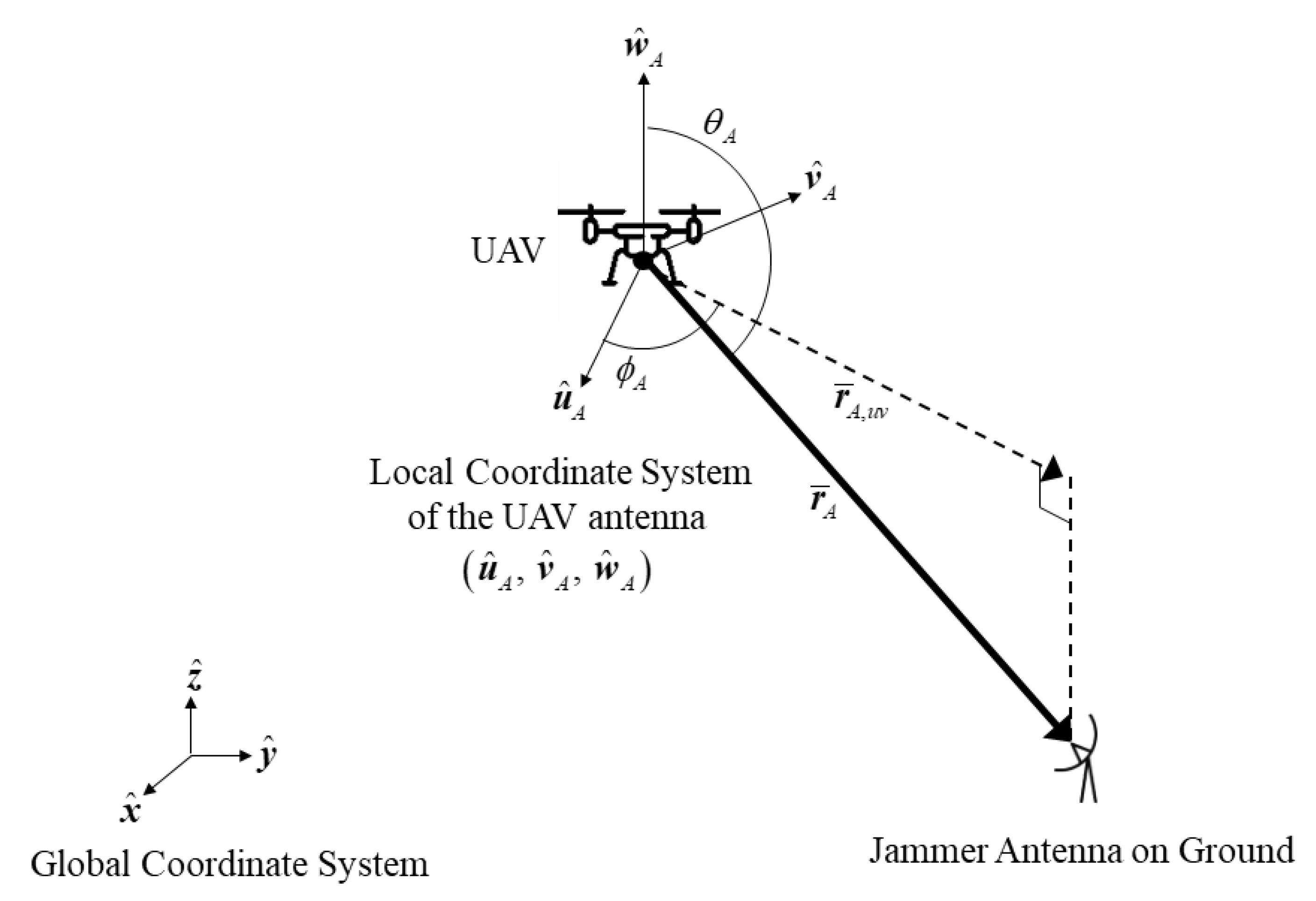
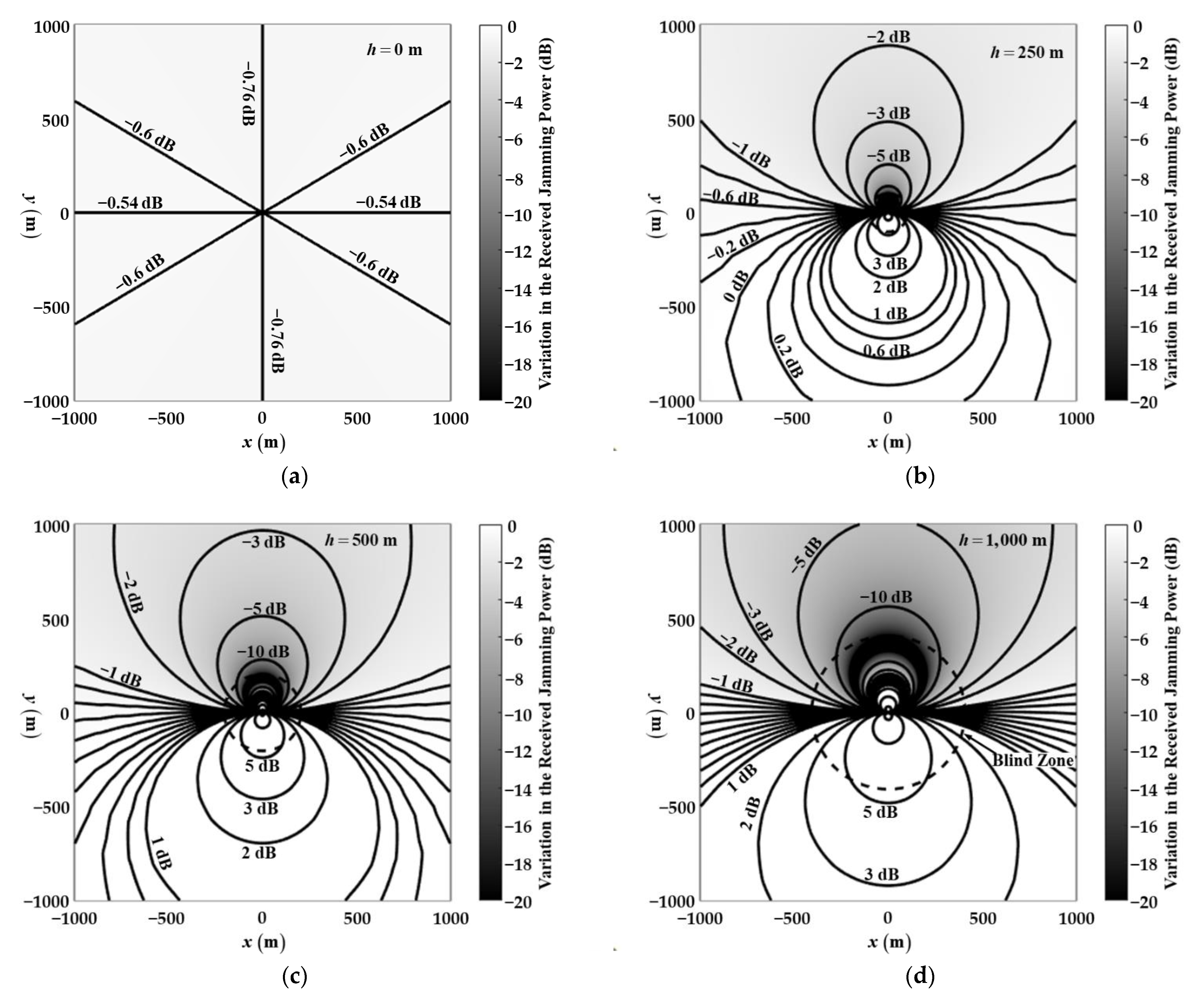
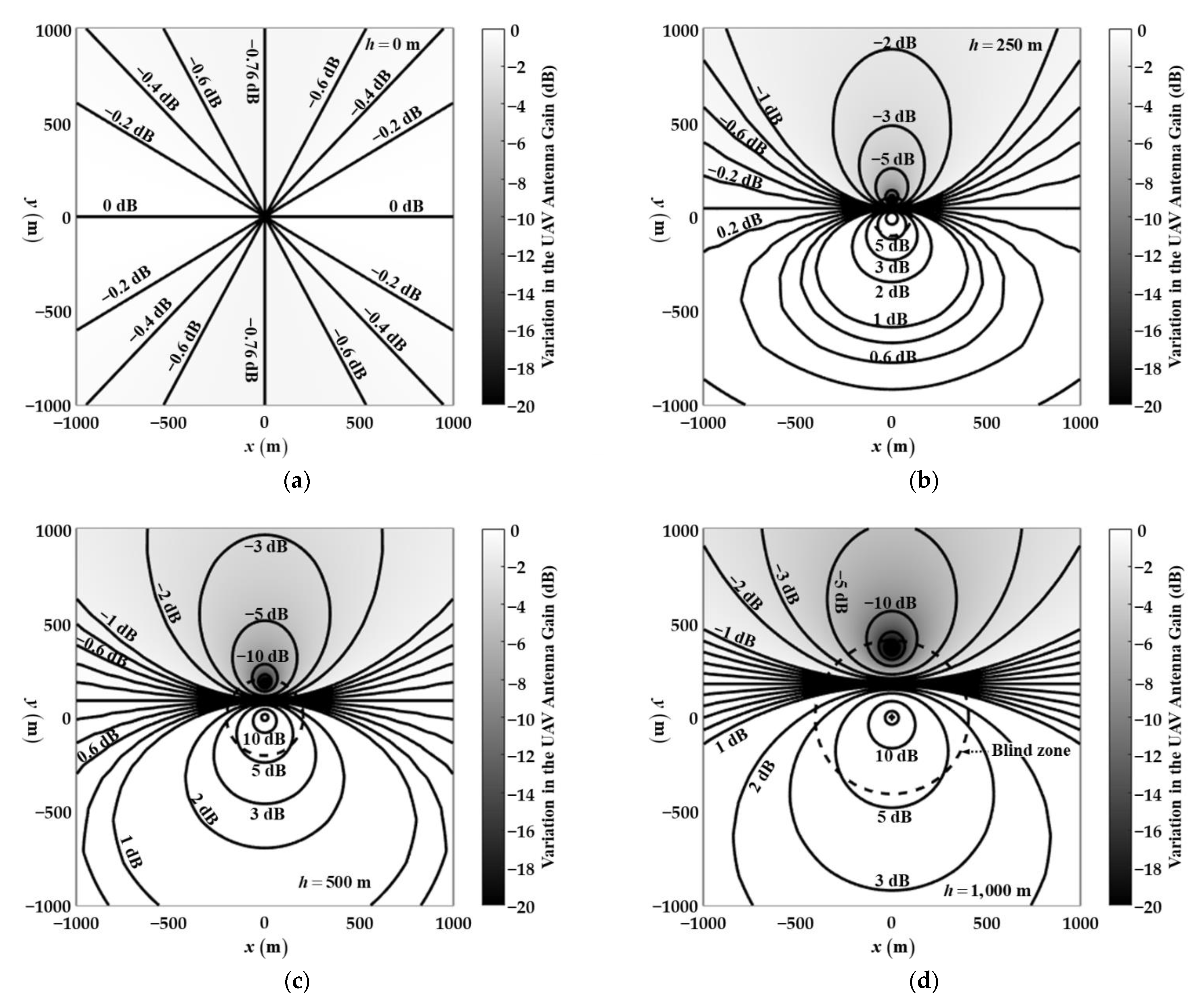
3. Analysis of the Received Jamming Power in the UAV Jamming Link Due to the Attitude Change
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hoffer, N.V.; Coopmans, C.; Jensen, A.M.; Chen, Y. A Survey and categorization of small low-cost unmanned aerial vehicle system identification. J. Intell. Robot. Syst. 2014, 74, 129–145. [Google Scholar] [CrossRef]
- Ding, W.; Gong, C.; Mosalam, K.M.; Soga, K. Development and application of the integrated sealant test apparatus for sealing gaskets in tunnel segmental joints. Tunn. Undergr. Space Technol. 2017, 63, 54–68. [Google Scholar] [CrossRef]
- Khuwaja, A.A.; Chen, Y.; Zhao, N.; Alouini, M.-S.; Dobbins, P. A survey of channel modeling for UAV communications. IEEE Commun. Surv. Tutor. 2018, 20, 2804–2821. [Google Scholar] [CrossRef] [Green Version]
- Eisenbeiss, H. A mini unmanned aerial vehicle (UAV): System overview and image acquisition. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2004, 36, 1–7. [Google Scholar]
- Sathyamoorthy, D. A review of security threats of unmanned aerial vehicles and mitigation steps. J. Def. Secur. 2015, 6, 81–97. [Google Scholar]
- Miasnikov, E. Threat of Terrorism Using Unmanned Aerial Vehicles: Technical Aspects; Center for Arms Control, Energy, and Environmental Studies, Moscow Institute of Physics and Technology: Moscow, Russia, 2005. [Google Scholar]
- Shi, X.; Yang, C.; Xie, W.; Liang, C.; Shi, Z.; Chen, J. Anti-drone system with multiple surveillance technologies: Architecture, implementation, and challenges. IEEE Commun. Mag. 2018, 56, 68–74. [Google Scholar] [CrossRef]
- Pärlin, K.; Alam, M.M.; le Moullec, Y. Jamming of UAV remote control systems using software defined radio. In Proceedings of the 2018 International Conference on Military Communications and Information Systems (ICMCIS), Warsaw, Poland, 22–23 May 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Chamola, V.; Kotesh, P.; Agarwal, A.; Naren; Gupta, N.; Guizani, M. A Comprehensive Review of Unmanned Aerial Vehicle Attacks and Neutralization Techniques. Ad Hoc Netw. 2021, 111, 102324. [Google Scholar] [CrossRef] [PubMed]
- De Martino, A. Introduction to Modern EW Systems; Artech House: Boston, MA, USA, 2018. [Google Scholar]
- Balanis, C.A. Antenna Theory: Analysis and Design; John Wiley & Sons: Hoboken, NJ, USA, 2015. [Google Scholar]
- Jędrusik, P. Efficiency of using active interference dedicated to medium range surveillance radar. In Proceedings of the Radioelectronic Systems Conference 2019, Jachranka, Poland, 11 February 2020; Volume 11442. [Google Scholar] [CrossRef] [Green Version]
- Mpitziopoulos, A.; Gavalas, D. An effective defensive node against jamming attacks in sensor networks. Secur. Commun. Netw. 2009, 2, 145–163. [Google Scholar] [CrossRef]
- Surendra, L.; Shameem, S.; Susmitha, N.; Ram, T.S. Analysis of self-screening jammer parameters with radar equation. Int. J. Eng. Res. Appl. 2014, 4, 205–207. [Google Scholar]
- Park, S.R.; Nam, I.; Noh, S. Modeling and simulation for the investigation of radar responses to electronic attacks in electronic warfare environments. Secur. Commun. Netw. 2018, 2018, 3580536. [Google Scholar] [CrossRef]
- Díaz, E.O. 3D Motion of Rigid Bodies: A Foundation for Robot Dynamics Analysis; Springer: Berlin/Heidelberg, Germany, 2018; Volume 191. [Google Scholar]
- Study on Channel Model for Frequencies from 0.5 to 100 GHz. Document 3rd Generation Partnership Project(3GPP) Technical Report 38.901, Version 16.1.0. December 2019. Available online: portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3173 (accessed on 6 September 2021).



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, K.; Lee, C.; Kim, H.; Park, K.; Kim, K. Variation in the Polarization Loss Factor in an Unmanned Aerial Vehicle Jamming Link Due to the Attitude Change. Appl. Sci. 2021, 11, 10725. https://doi.org/10.3390/app112210725
Kim K, Lee C, Kim H, Park K, Kim K. Variation in the Polarization Loss Factor in an Unmanned Aerial Vehicle Jamming Link Due to the Attitude Change. Applied Sciences. 2021; 11(22):10725. https://doi.org/10.3390/app112210725
Chicago/Turabian StyleKim, Kiin, Chiho Lee, Hojun Kim, Kyungtae Park, and Kangwook Kim. 2021. "Variation in the Polarization Loss Factor in an Unmanned Aerial Vehicle Jamming Link Due to the Attitude Change" Applied Sciences 11, no. 22: 10725. https://doi.org/10.3390/app112210725
APA StyleKim, K., Lee, C., Kim, H., Park, K., & Kim, K. (2021). Variation in the Polarization Loss Factor in an Unmanned Aerial Vehicle Jamming Link Due to the Attitude Change. Applied Sciences, 11(22), 10725. https://doi.org/10.3390/app112210725