
Structural Design, Simulation and Experiment of Quadruped Robot



Abstract
:1. Introduction
2. Structure Designs
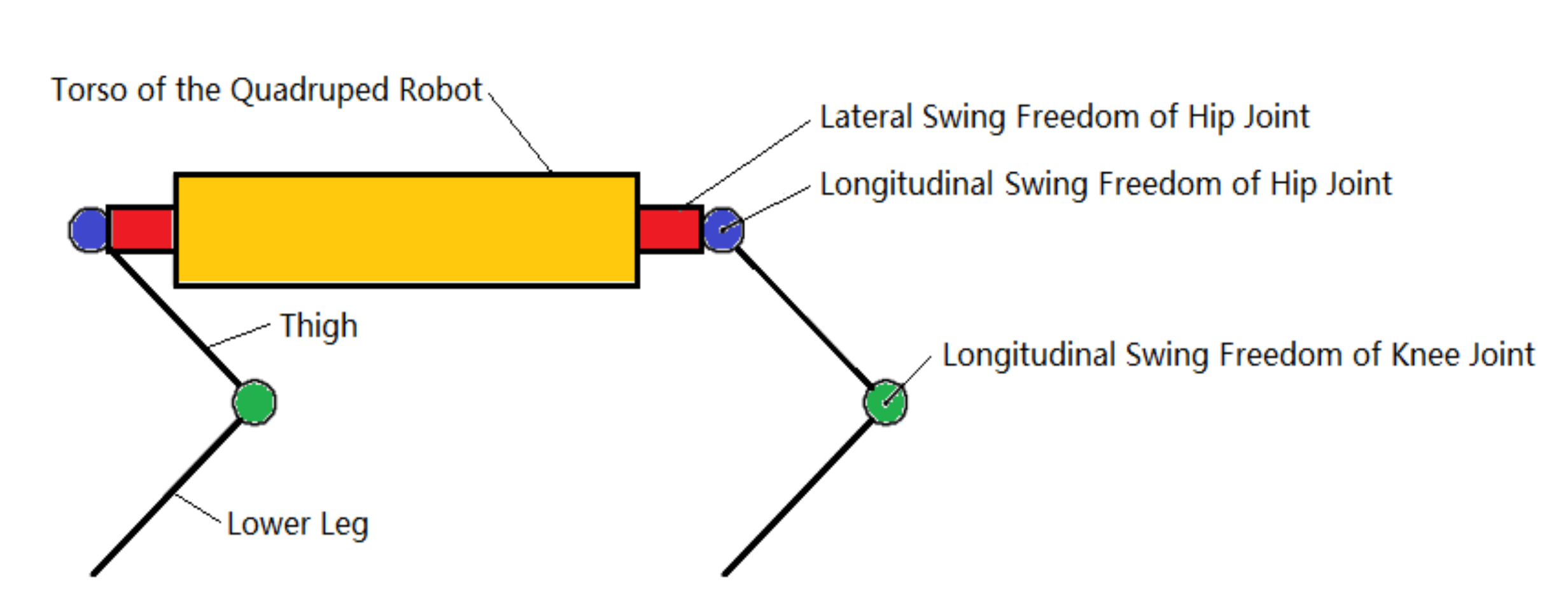
2.1. Topological Structure of the Quadruped Robot
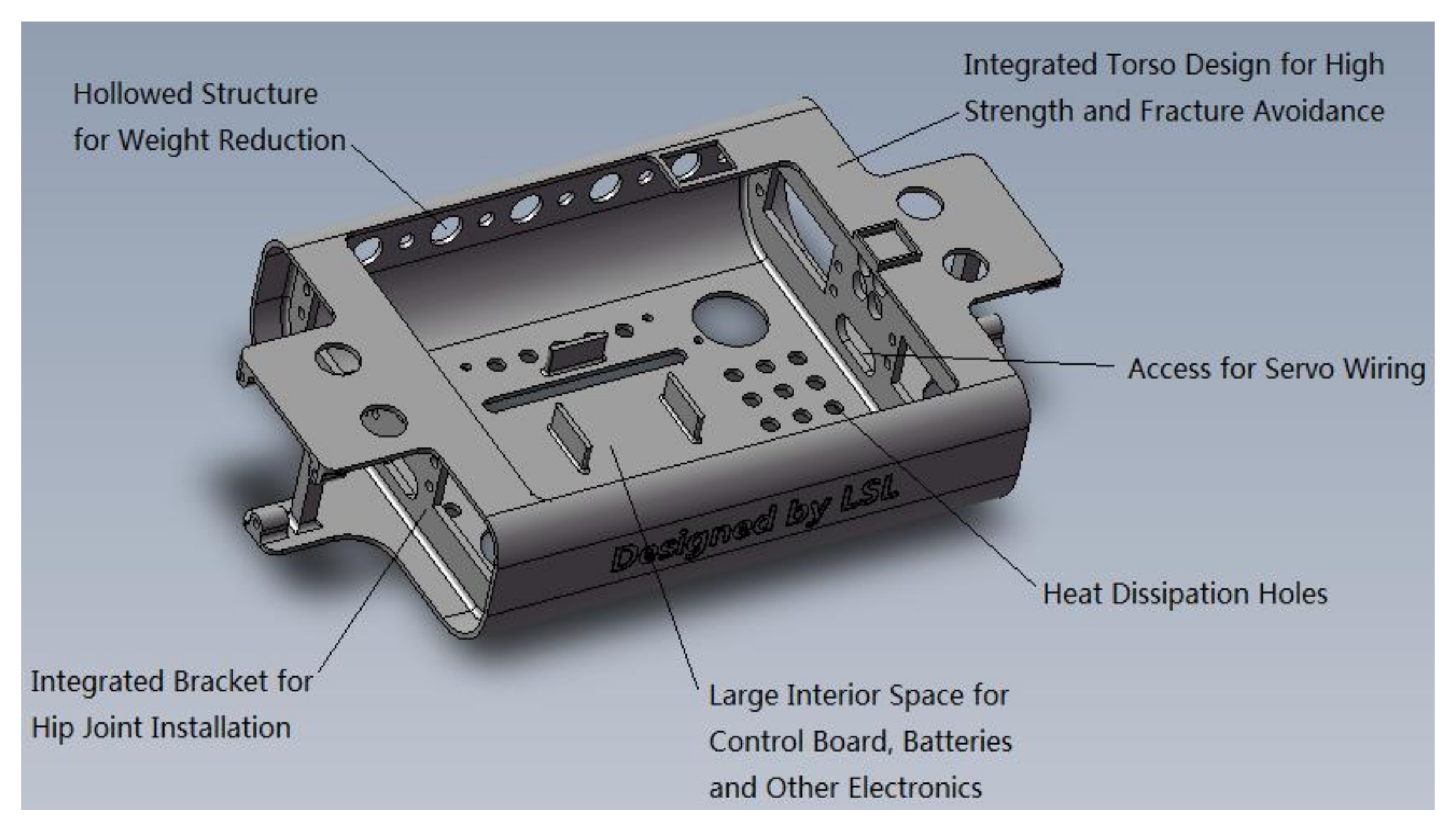
2.2. Torso Design
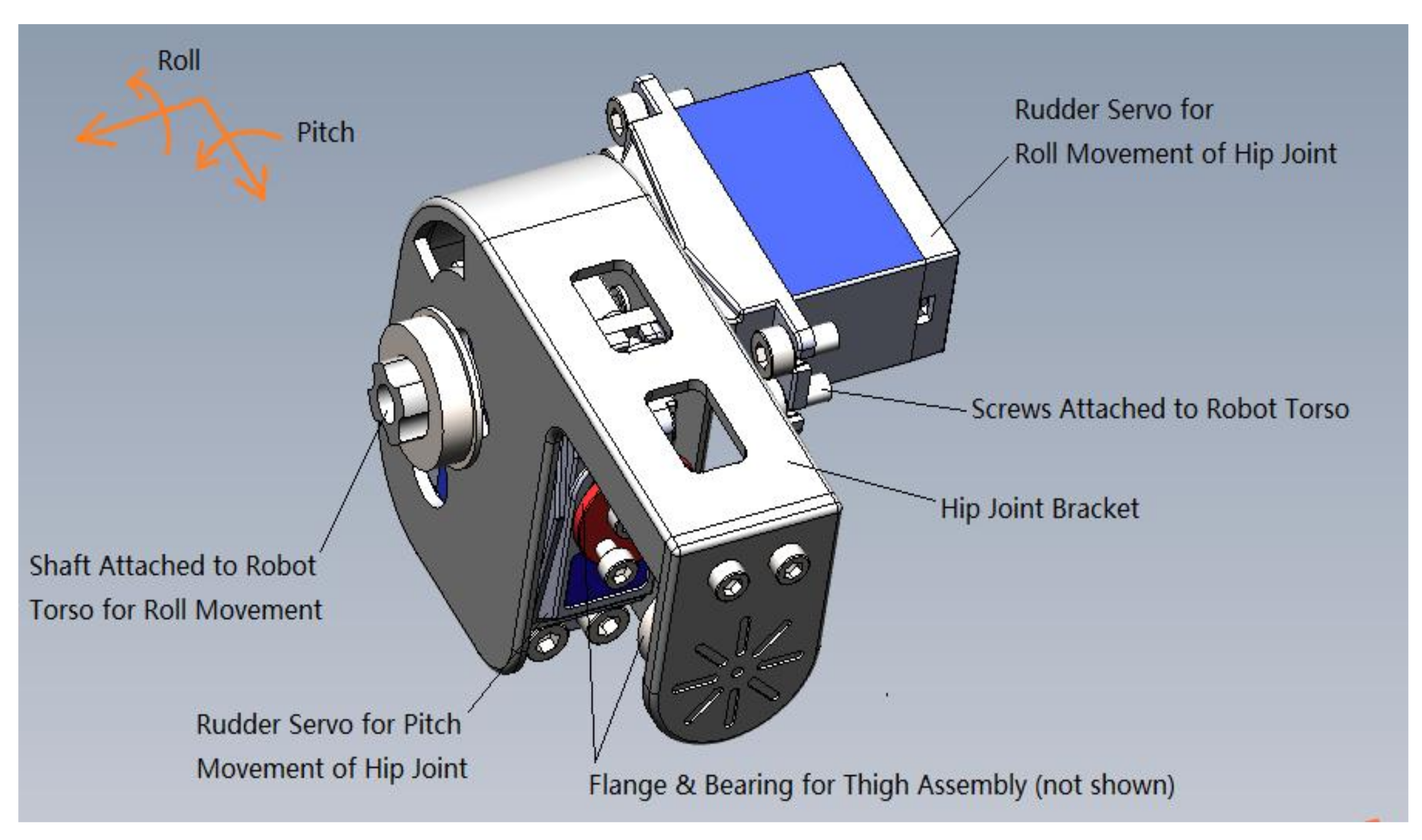
2.3. Hip Joint Design
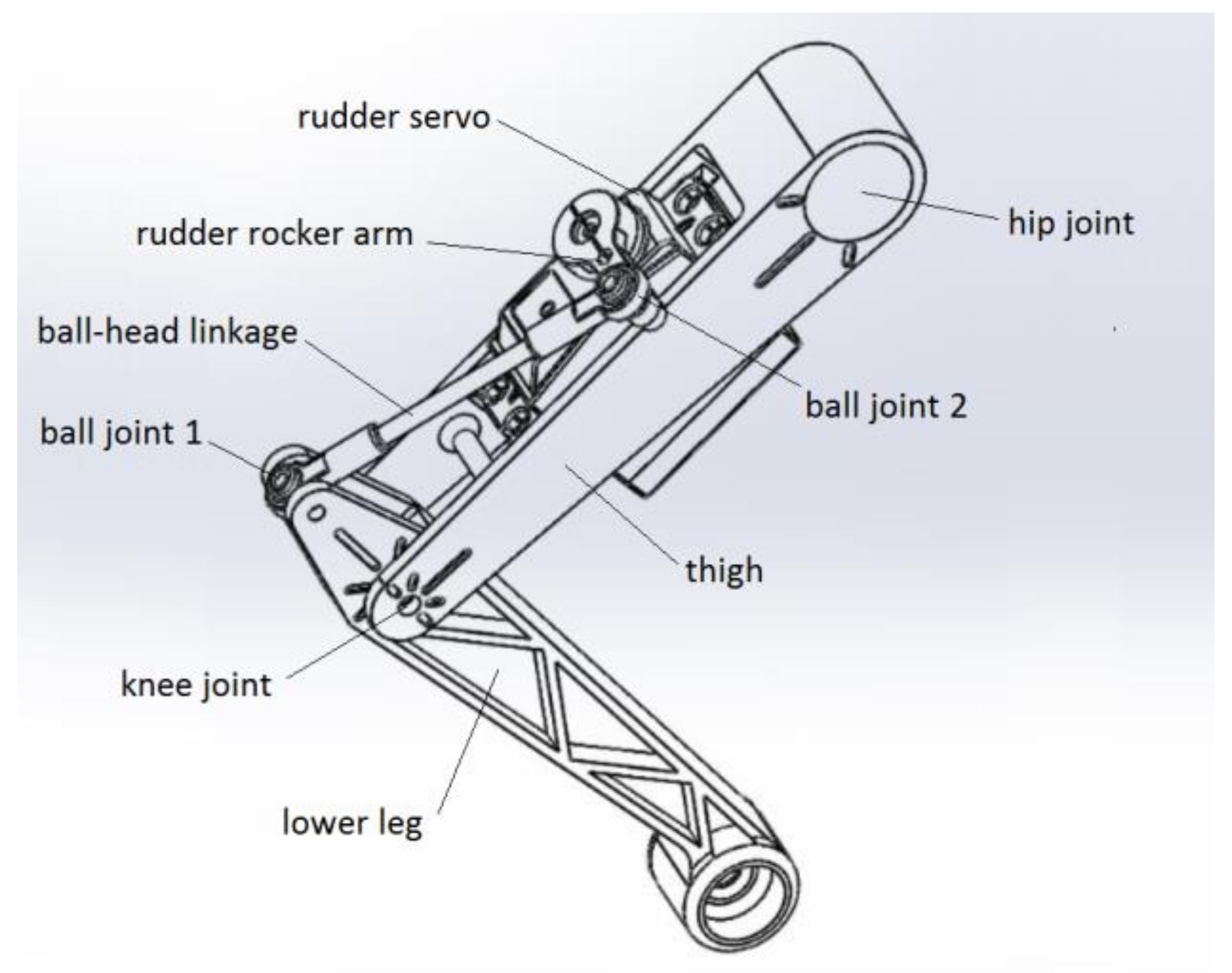
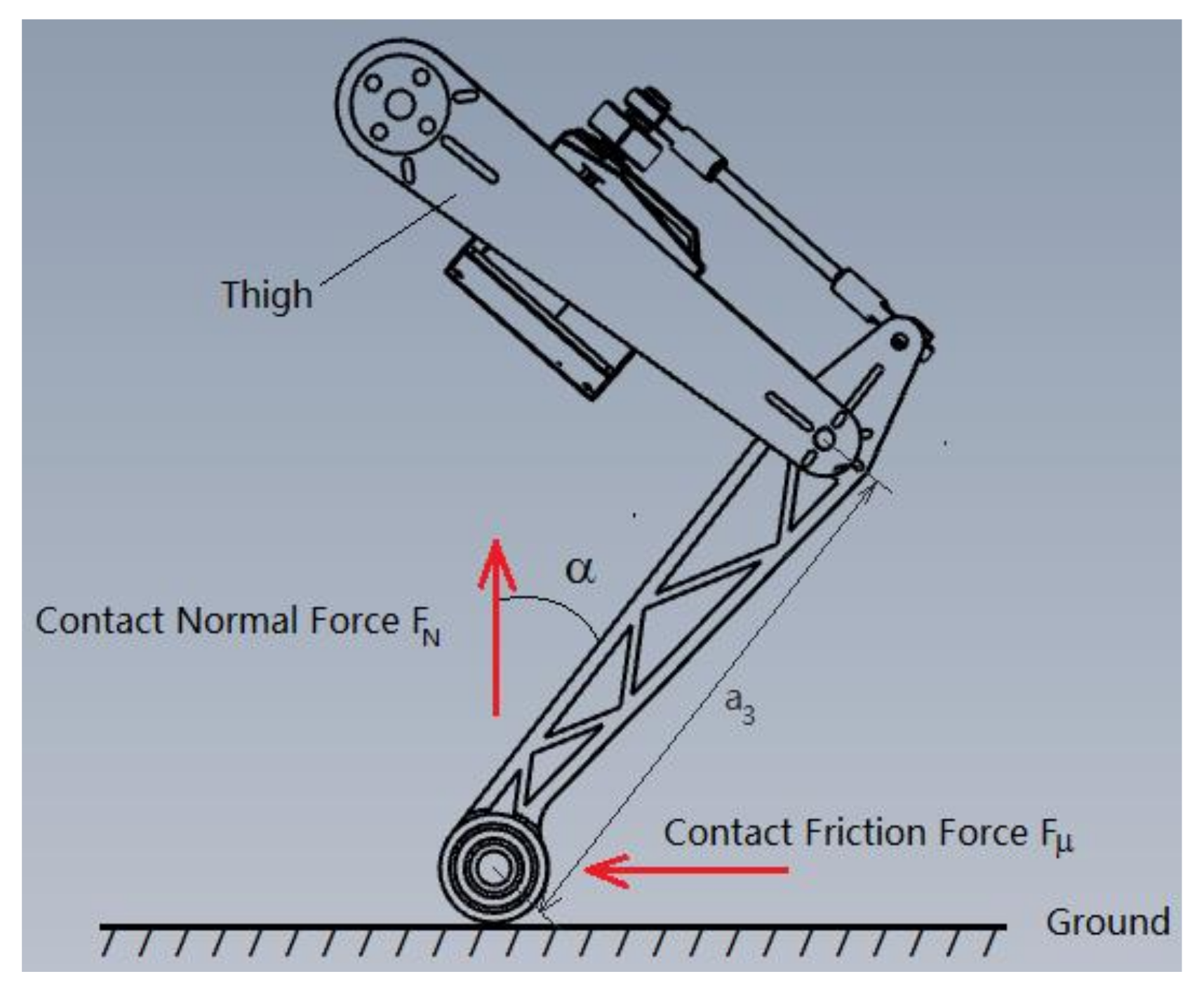
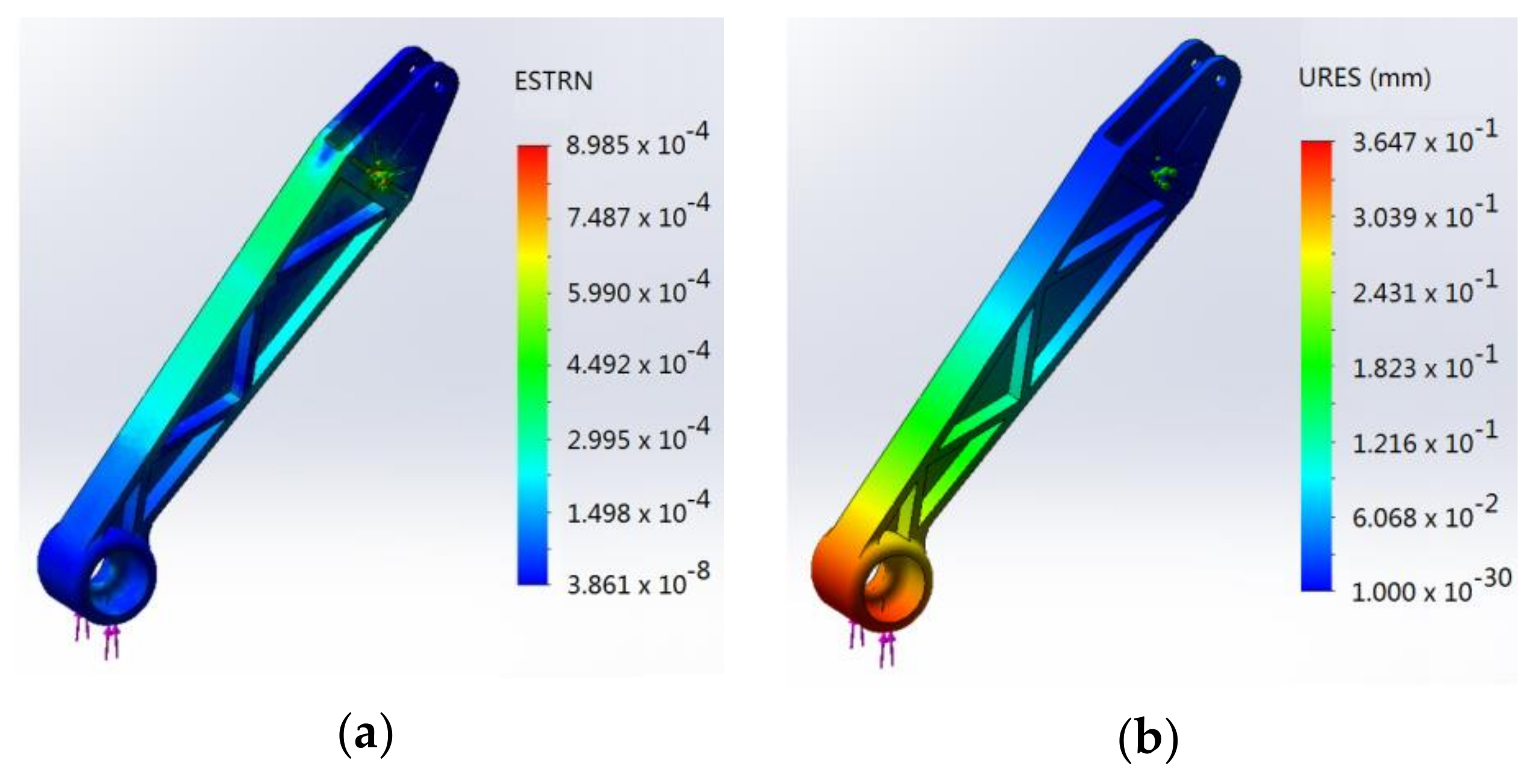
2.4. Leg Design
2.5. Selection of Actuators
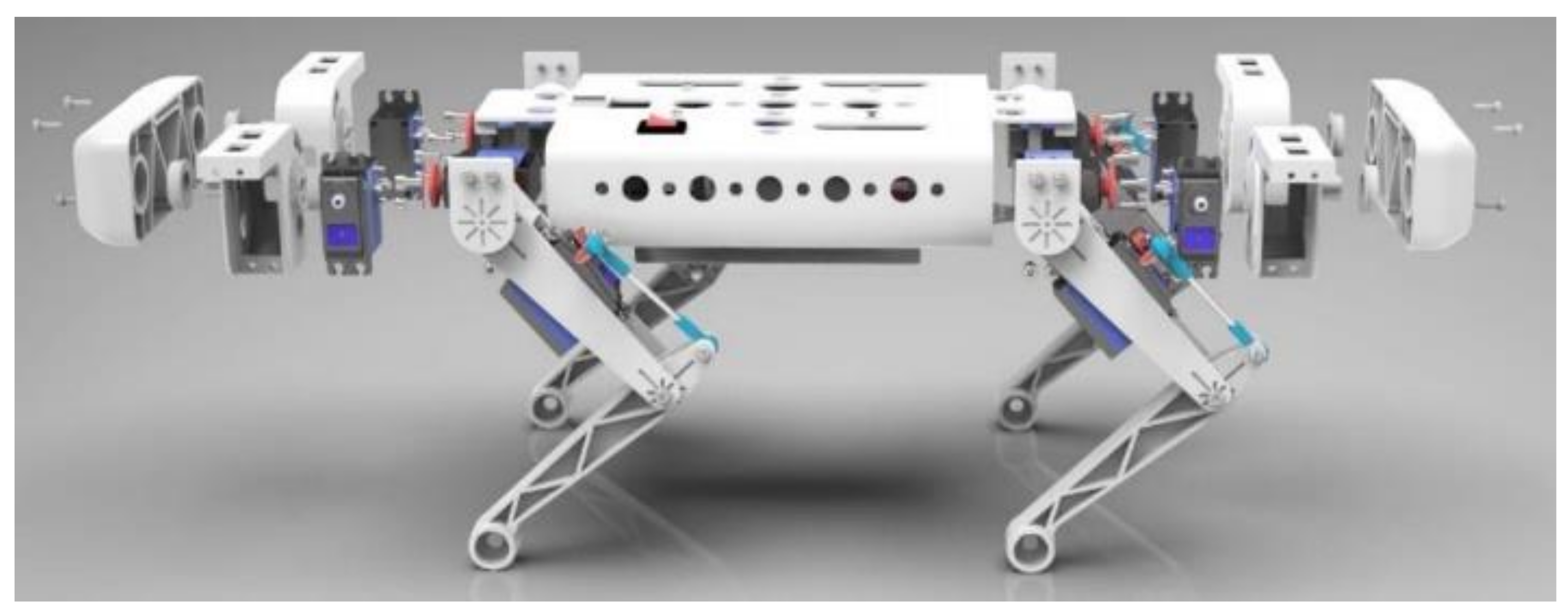
2.6. Overall Design
3. Forward and Inverse Kinematic Solving
3.1. Establishment of the DH Coordinate System
- = the distance from to along the axis;
- = the angle of rotation around the axis, from to ;
- = the distance along the axis, from to ;
- = the angle of rotation around the axis, from to .
3.2. Forward Kinematics Solving
3.3. Inverse Kinematic Solving
4. Gait Planning and Motion Analysis
4.1. Common Gait Patterns for Quadruped Robots
4.2. Footpath Planning
5. Dynamics and Simulation Based on ADAMS and MATLAB
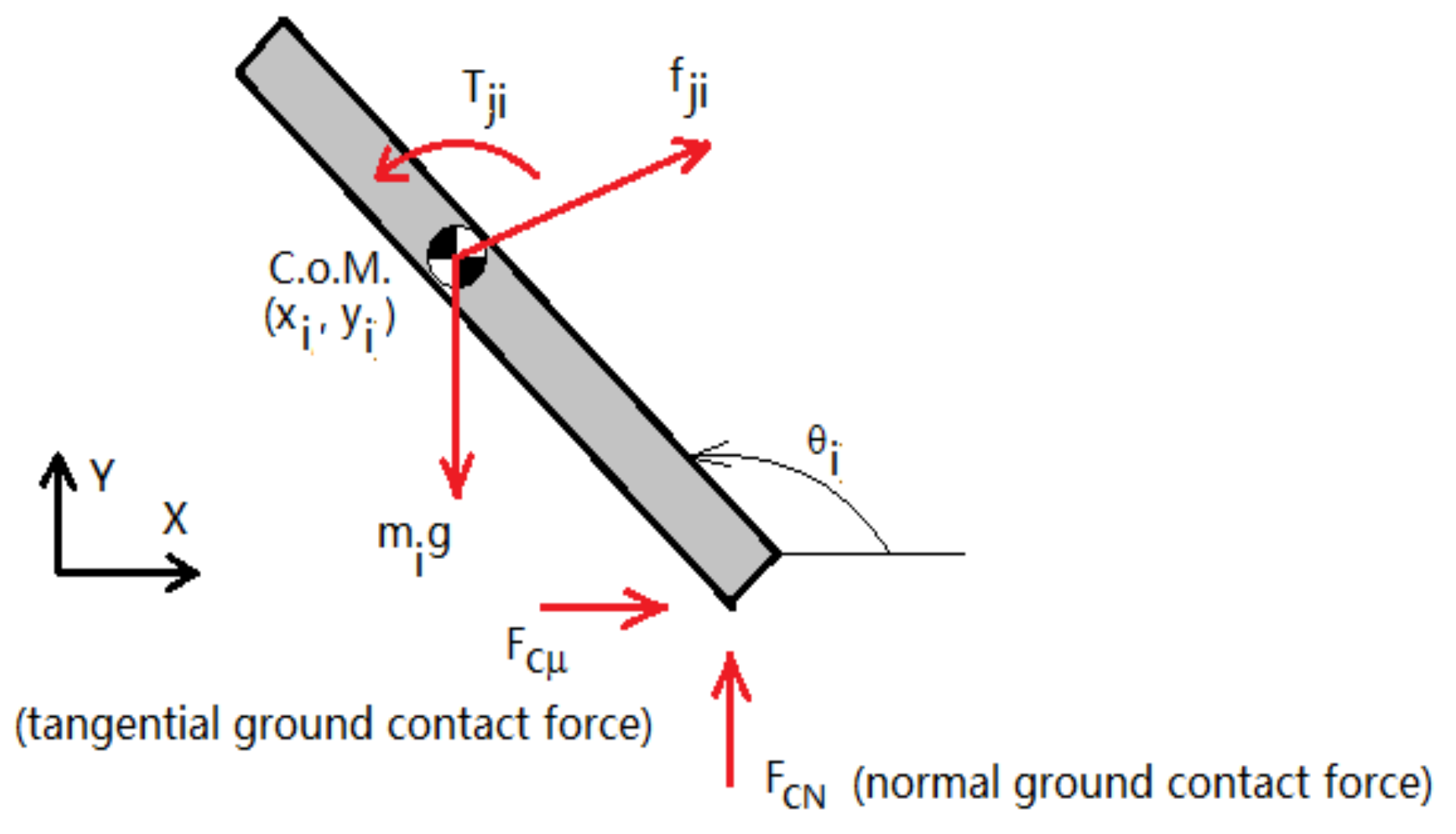
5.1. Dynamic Modeling
5.2. Virtual Prototyping
- (1)
- Deletion of parts that are not relevant to the simulation, such as control plates, bolts, nuts, etc.;
- (2)
- Appropriate reduction of part features, such as rounded corners, chamfers, hollowing, etc.;
- (3)
- Reducing the number of parts in the assembly by combining parts that can be considered as a whole into a single part using Boolean operations.
5.3. ADAMS and MATLAB Simulation
- (1)
- The gait function generates foot-end trajectory functions for the swing and support phases in a single cycle;
- (2)
- The inverse-kinematics function converts the pre-planned foot-end trajectory function into a function of the joint angles using the inverse kinematic solution.
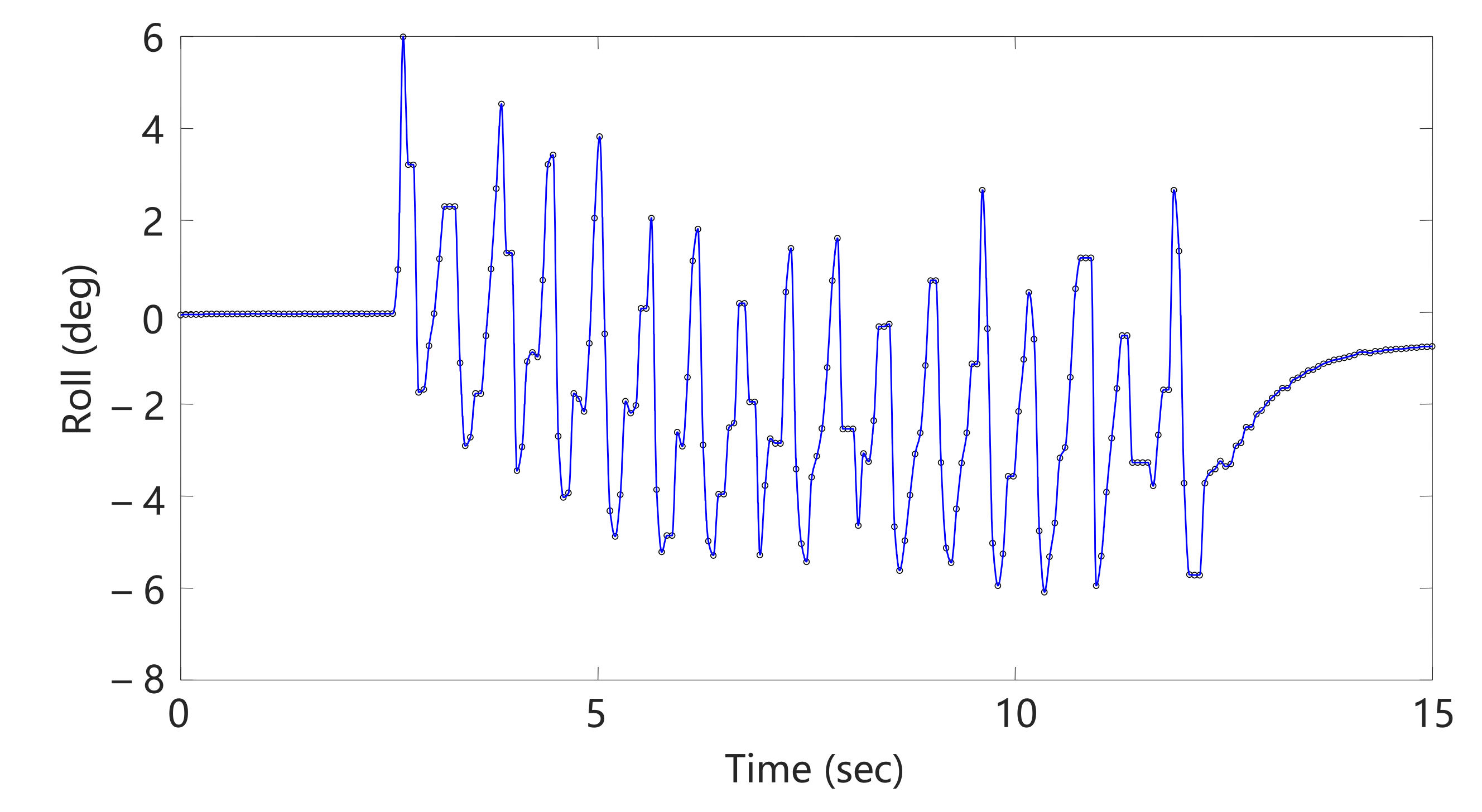
5.4. Analysis of Simulation Results
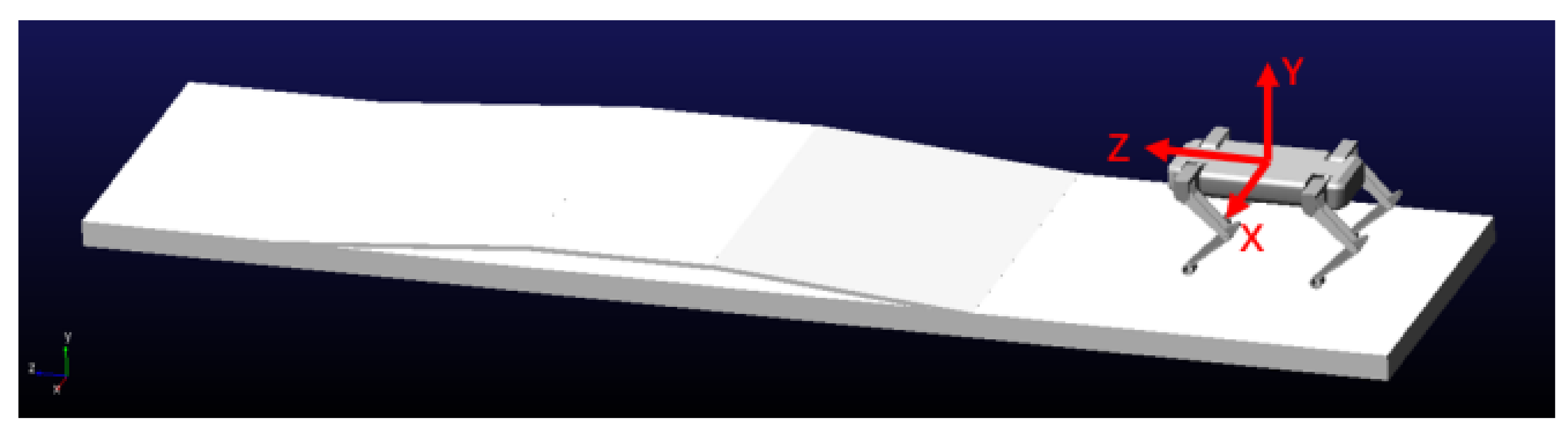
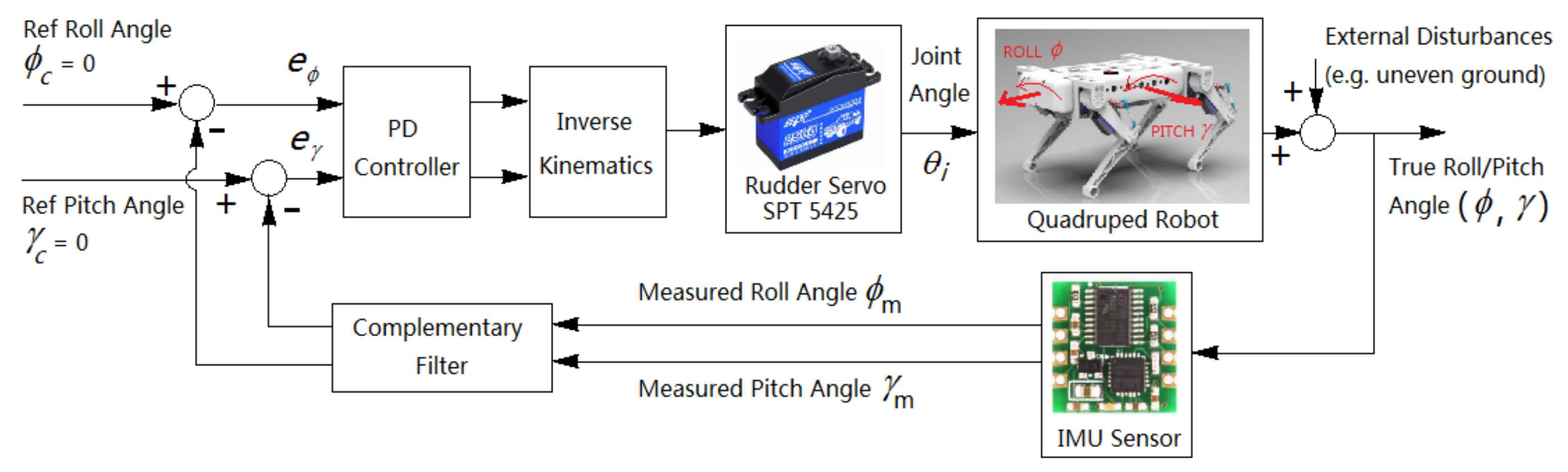
6. Physical Design and Experimental Validation
6.1. Description of the Prototype
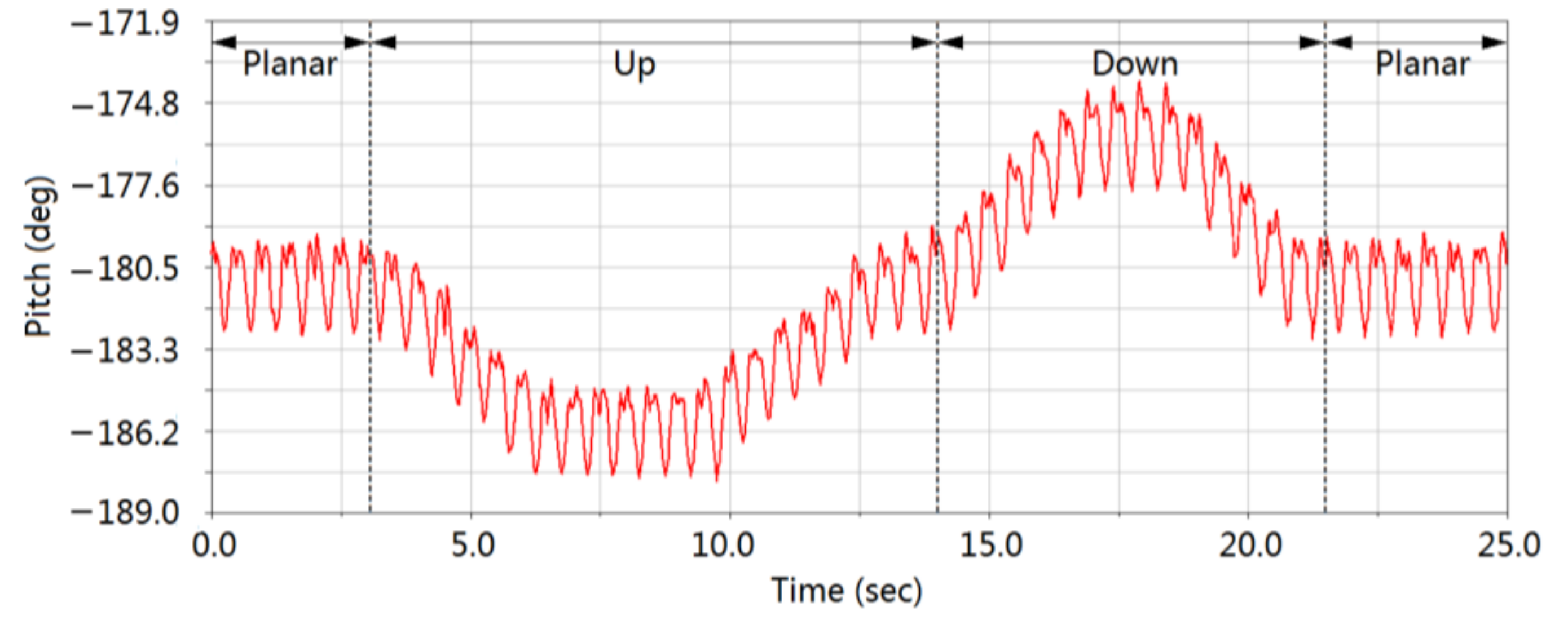
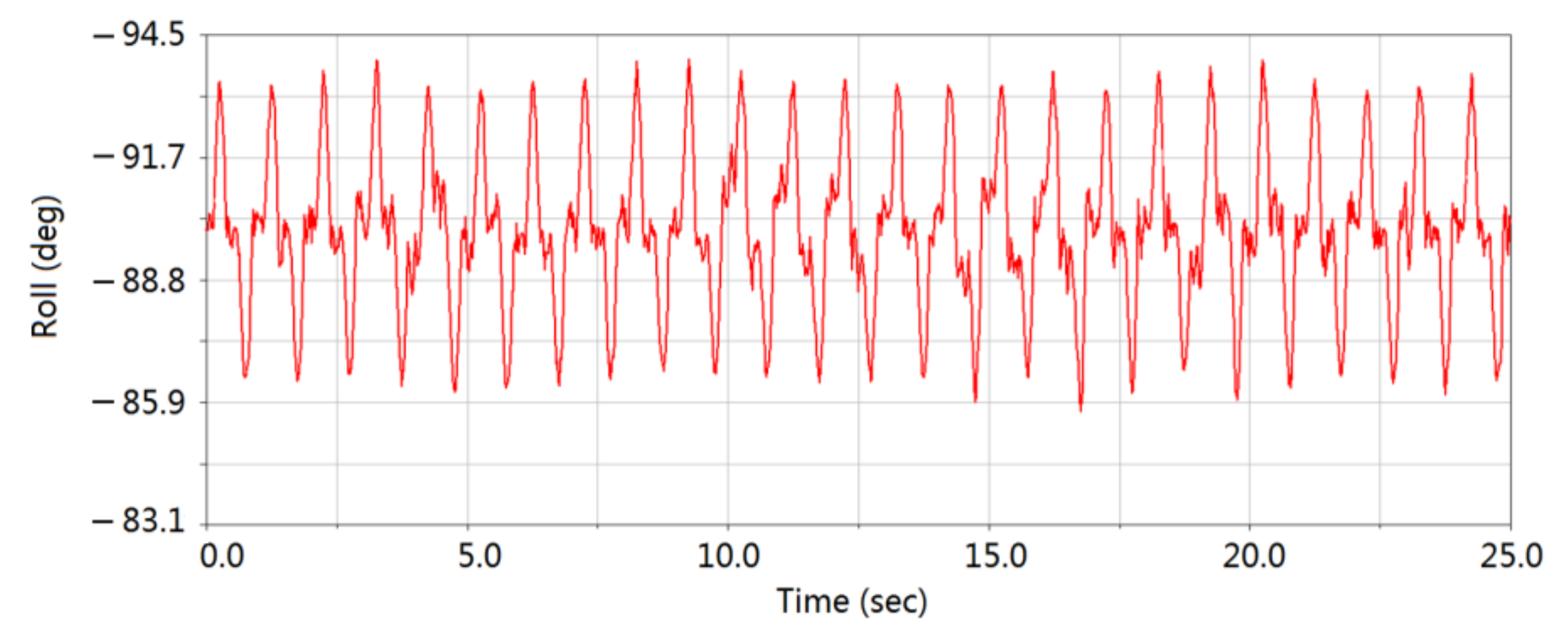
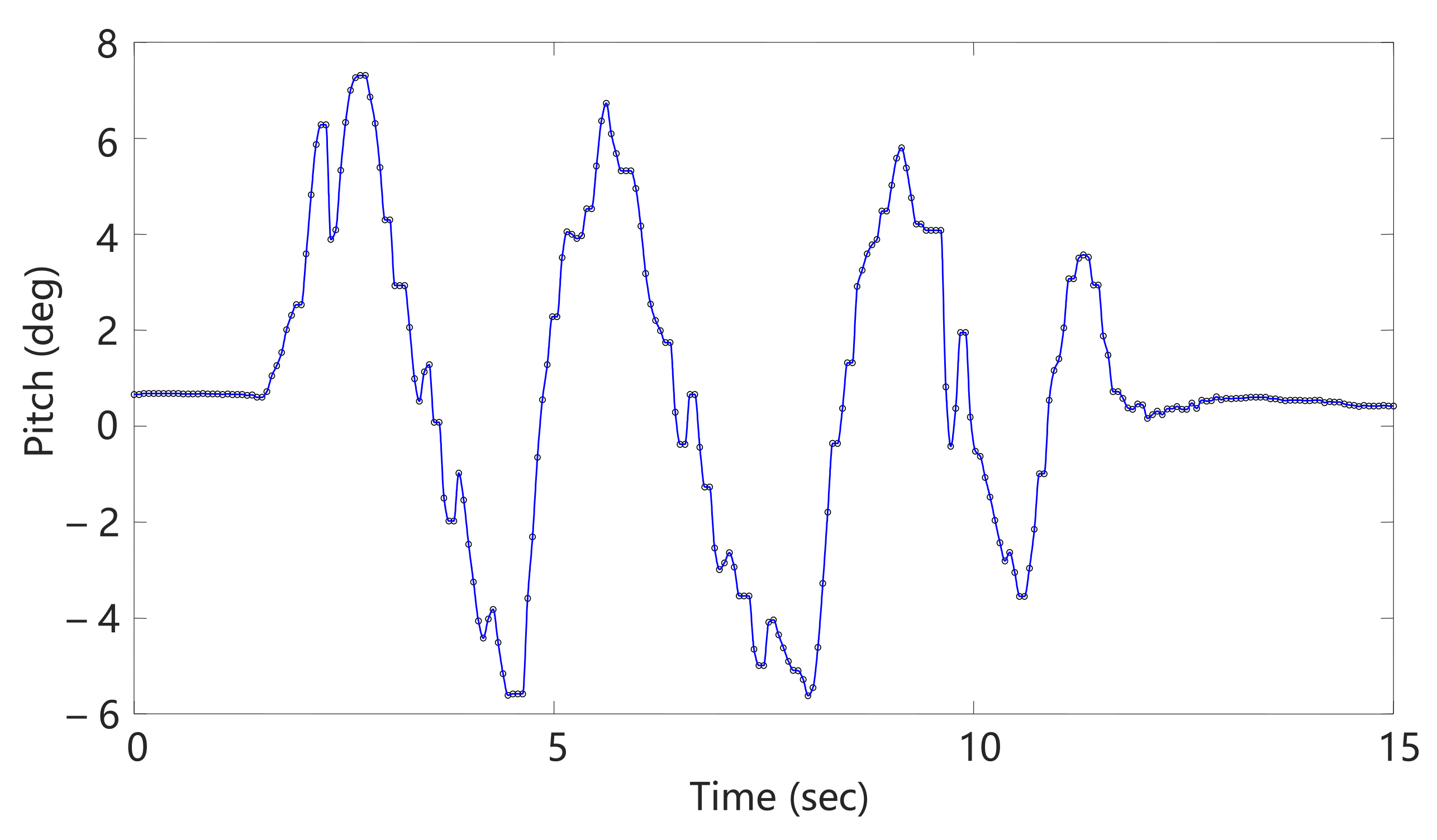
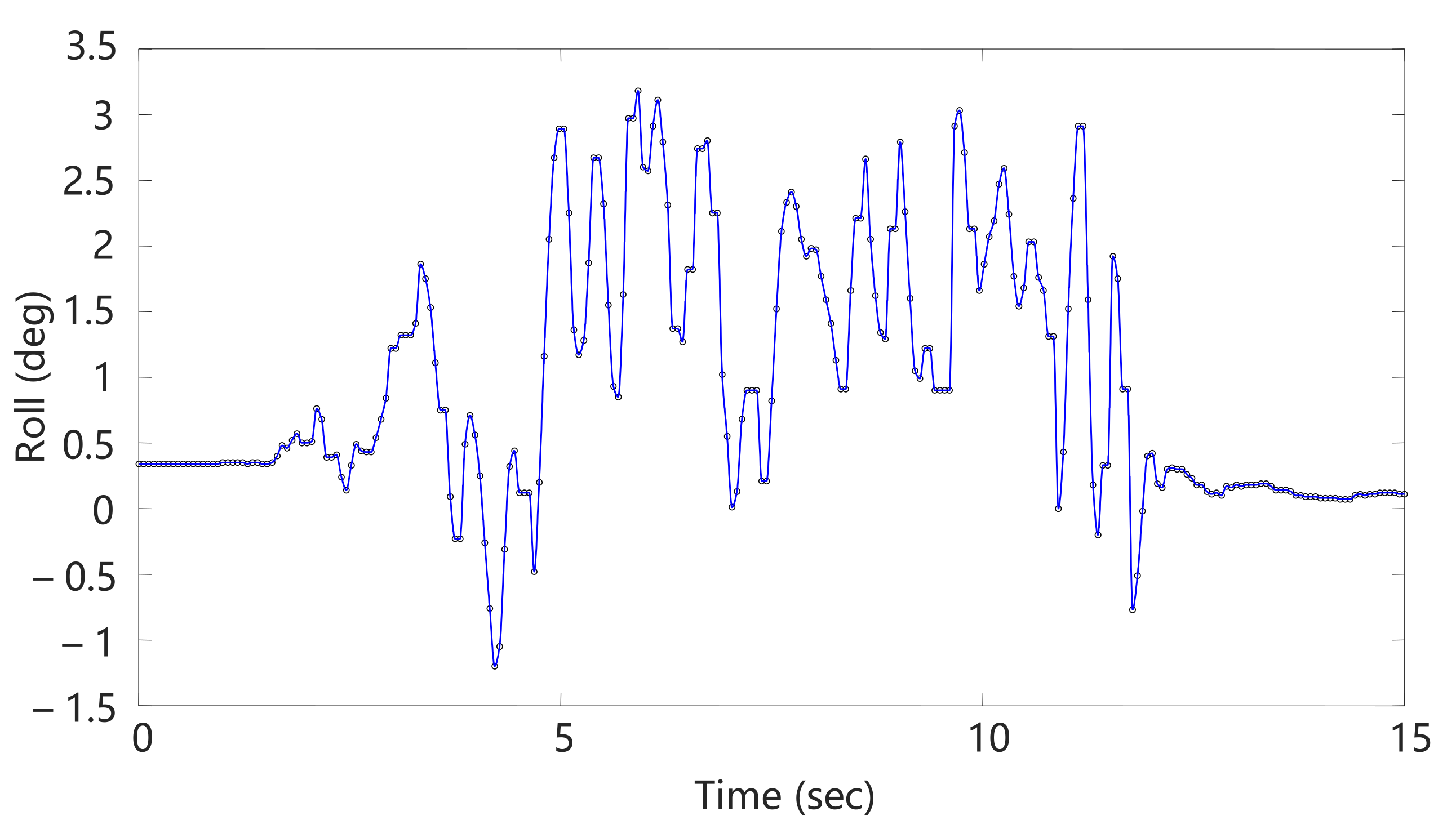
6.2. Diagonal Trot Gait Experiment
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhang, F.; Teng, S.; Wang, Y. Design of Bionic Goat Quadruped Robot Mechanism and Walking Gait Planning. Int. J. Agric. Biol. Eng. 2020, 13, 32–39. [Google Scholar] [CrossRef]
- Rajat, K.; Kanaiya, G.; Nikhil, K. Overview of Different Techniques Utilized in Designing of a Legged Robot. Glob. J. Enterp. Inf. Syst. 2017, 9, 1–6. [Google Scholar]
- Priyaranjan, B.; Mohanty, K. Development of Quadruped Walking Robots: A Review. Ain Shams Eng. J. 2021, 12, 2017–2031. [Google Scholar]
- Zhang, S.; Fan, M.; Li, Y. Generation of a Continuous Free Gait for Quadruped Robot over Rough Terrains. Adv. Robot. 2019, 33, 74–89. [Google Scholar] [CrossRef]
- Meng, X.; Wang, S.; Cao, Z. A Review of Quadruped Robots and Environment Perception. In Proceedings of the 35th Chinese Control Conference (CCC), Chengdu, China, 27–29 July 2016; pp. 6350–6356. [Google Scholar]
- Liu, H.; Zhang, X.; Fu, C.; Ma, H. Compliant Gait Generation for a Quadruped Bionic Robot Walking on Rough Terrains. Robot 2014, 36, 584–591. [Google Scholar]
- Srinivas, T. Valkyrie—Design and Development of Gaits for Quadruped Robot Using Particle Swarm Optimization. Appl. Sci. 2021, 11, 7458. [Google Scholar] [CrossRef]
- Raza, F. Balance Stability Augmentation for Wheel-Legged Biped Robot through Arm Acceleration Control. IEEE Access 2021, 9, 54022–54031. [Google Scholar] [CrossRef]
- Kim, J. Design and Control of a Open-Source, Low Cost, 3D Printed Dynamic Quadruped Robot. Appl. Sci. 2021, 11, 3762. [Google Scholar] [CrossRef]
- Li, Y.; Li, B.; Ruan, J.; Rong, X. Research of Mammal Bionic Quadruped Robots: A Review. In Proceedings of the 5th International Conference on Robotics, Automation and Mechatronics (RAM), Qingdao, China, 17–19 September 2011; pp. 166–171. [Google Scholar]
- Xing, B.; Feng, P.; Feng, X. Improved ZMP Crawling Gait Algorithm for Quadruped Robot Based on Intelligent Decision Making. Comput. Eng. Appl. 2019, 55, 206–257. [Google Scholar]
- Min, I.; Yoo, D.; Min, S. Body Trajectory Generation Using Quadratic Programming in Bipedal Robots. In Proceedings of the 20th International Conference on Control, Automation and Systems (ICCAS), Busan, Korea, 13–16 October 2020; pp. 251–257. [Google Scholar]
- Han, B.; Wang, Q.; Jia, Y. Trot Gait Planning Method for Improving the Stability of Quadruped Robot. Beijing LigongDaxueXuebao/Trans. Beijing Inst. Technol. 2018, 38, 917–920. [Google Scholar]
- Gianluca, P. Maicol and Belfiore. Quadrupedal Robots’ Gaits Identification via Contact Forces Optimization. Appl. Sci. 2021, 11, 2102. [Google Scholar]
- Liu, Y.; Zhou, C.; Guo, J. Single-Step Emergency Stop Stability Control Strategy for Quadruped Robot. J. Nanjing Univ. Sci. Technol. 2020, 44, 259–265. [Google Scholar]
- Xu, J.; Ge, L.; Wang, J. ZMP Preview Control Based Compliance Control for a Walking Quadruped Robot. In Proceedings of the 2015 IEEE International Conference on Information and Automation, Lijiang, China, 8–10 August 2015; pp. 7–12. [Google Scholar]
- Zhang, D.; Zheng, W.; Yang, Y. CPG-Based Gait Control Method for Quadruped Robot Jumping Movement. In Proceedings of the 7th International Conference on Control, Automation and Robotics (ICCAR), Singapore, 23–26 April 2021; pp. 41–45. [Google Scholar]
- Liu, M. Local CPG Self Growing Network Model with Multiple Physical Properties. Appl. Sci. 2020, 10, 5497. [Google Scholar] [CrossRef]
- Zhang, D.; Zheng, W. Design and Gait Optimization of Quadruped Robot Based on Energy Conservation. In Proceedings of the 3rd International Conference on Control and Robots (ICCR), Tokyo, Japan, 26–29 December 2020; pp. 112–119. [Google Scholar]
- Shang, L.; Li, Z. Smooth Gait Transition Based on CPG Network for a Quadruped Robot. In Proceedings of the 2019 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Hong Kong, China, 8–12 July 2019; pp. 358–363. [Google Scholar]
- Takahiro, F. Autonomous Gait Transition and Galloping over Unperceived Obstacles of a Quadruped Robot with CPG Modulated by Vestibular Feedback. Robot. Auton. Syst. 2019, 111, 1–19. [Google Scholar]
- Liu, C.; Chen, Q.; Wang, D. CPG-Inspired Workspace Trajectory Generation and Adaptive Locomotion Control for Quadruped Robots. IEEE Trans. Syst. ManCybern. Part B: Cybern. 2011, 41, 867–880. [Google Scholar]
- Lu, G.; Chen, T.; Liu, Q. A Novel Multi-Configuration Quadruped Robot with Redundant DOFs and Its Application Scenario Analysis. In Proceedings of the 2021 International Conference on Computer, Control and Robotics (ICCCR), Shanghai, China, 8–10 January 2021; pp. 14–20. [Google Scholar]
- Gong, D. Bionic Quadruped Robot Dynamic Gait Control Strategy Based on Twenty Degrees of Freedom. IEEE/CAA J. Autom. Sin. 2018, 5, 382–388. [Google Scholar] [CrossRef]
- Yang, J.; Sun, H.; Wu, D. SLIP Model-Based Foot-to-Ground Contact Sensation via Kalman Filter for Miniaturized Quadruped Robots. In Proceedings of the Intelligent Robotics and Applications: 12th International Conference, ICIRA 2019, Shenyang, China, 8–11 August 2019; p. 3. [Google Scholar]
- Hiroshi, T.; Masato, D.; Jun, U. Slip-Adaptive Walk of Quadruped Robot. Robot. Auton. Syst. 2005, 53, 124–141. [Google Scholar]
- Seo, J.; Kim, J. A SLIP-Based Robot Leg for Decoupled Spring-like Behavior: Design and Evaluation. Int. J. Control. Autom. Syst. 2019, 17, 2388–2399. [Google Scholar] [CrossRef]
- Chen, T.; Rong, X.; Li, Y.; Ding, C. A Compliant Control Method for Robust Trot Motion of Hydraulic Actuated Quadruped Robot. Int. J. Adv. Robot. Syst. 2018, 15, 1729881418813235. [Google Scholar] [CrossRef] [Green Version]
- Chen, G. Dynamic Balance and Trajectory Tracking Control of Quadruped Robots Based on Virtual Model Control. In Proceedings of the 39th Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020; pp. 3771–3776. [Google Scholar]
- Zhao, J. Fractional-Order Virtual Model Control for Trotting Motion of Quadruped Robot. In Proceedings of the Chinese Control And Decision Conference (CCDC) 2020, Hefei, China, 22–24 August 2020; pp. 4935–4942. [Google Scholar]
- Lin, G.; Jia, W.; Ma, S. Research and Analysis of Comprehensive Optimization Method for Energy Consumption and Trajectory Error of the Leg Structure Based on Virtual Model Control. In Proceedings of the 2021 IEEE International Conference on Mechatronics and Automation (ICMA), Takamatsu, Japan, 8–11 August 2021; pp. 1094–1099. [Google Scholar]
- Zhang, G. Torso Motion Control and Toe Trajectory Generation of a Trotting Quadruped Robot Based on Virtual Model Control. Adv. Robot. 2016, 30, 284–297. [Google Scholar] [CrossRef]
- Meng, J. A Dynamic Balancing Approach for a Quadruped Robot Supported by Diagonal Legs. Int. J. Adv. Robot. Syst. 2015, 12, 10. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Guo, Z.; Chen, D. Gait Control of Quadruped Robot Driven by Pneumatic Muscle Based on Kimura Oscillator and Virtual Model. Acta Armamentarii 2018, 39, 1411–1418. [Google Scholar]
- Corral, E.; Moreno, R.G.; García, M.G.; Castejón, C. Nonlinear Phenomena of Contact in Multibody Systems Dynamics: A Review. Nonlinear Dyn. 2021, 104, 1269–1295. [Google Scholar] [CrossRef]
- Corral, E.; Meneses, J.; Castejon, C.; Garcia-Prada, J. Forward and Inverse Dynamics of the Biped PASIBOT. Int. J. Adv. Robot. Syst. 2014, 11, 109. [Google Scholar] [CrossRef]
- Hoyt, D.; Taylor, C. Gait and the Energetics of Locomotion in Horses. Nature 1981, 292, 239–240. [Google Scholar] [CrossRef]
- Lei, J.; Wang, F. Energy Consumption Analysis of Quadruped Robot with Trot Gait. Appl. Mech. Mater. 2013, 271, 1531–1535. [Google Scholar] [CrossRef]
- Gao, F.; Lei, J.; Xu, G. Trot Gait and Energy Consumption Simulation of a Quadruped Robot. J. Beijing Univ. Aeronaut. Astronaut. 2007, 33, 719–722. [Google Scholar]
- Chenkun, Q.; Feng, G.; Xianchao, Z.; Qiao, S.; Xinghua, T.; Xianbao, C. Dynamic Model Based Ground Reaction Force Estimation for a Quadruped Robot Without Force Sensor. In Proceedings of the 34th Chinese Control Conference (CCC), Hangzhou, China, 28–30 July 2015; pp. 6084–6089. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Weight | Size (L×W × H) | Operation Voltage | Max Signal Frequency | Range of Rotation | Max Speed | Max Torque |
|---|---|---|---|---|---|---|---|
| SPT-5425 | 57 g | 40.5 × 20 × 40.5 mm | 4.8 V 6 V | 330 Hz | 10–180° | 0.22 s/60° (@4.8 V) 0.18 s/60° (@6 V) | 24 kg·cm (@4.8 V) 26 kg·cm(@6 V) |
| Length | Width | Height | Foot Distance | Thigh Length | Calf Length | Freedom |
|---|---|---|---|---|---|---|
| 390 mm | 230 mm | 180 mm | 190 mm | 110 mm | 110 mm | 12 |
| Linkage | ||||||
|---|---|---|---|---|---|---|
| Value | Value | |||||
| 1 | 0 | 0 | 0 | 0 | 0 | |
| 2 | 0 | 0 | 0 | 90° | ||
| 3 | 110 | −90° | 0 | −90° | ||
| 4 | 113 | 0 | 0 | 0 | / | |
| Normal Force | Stiffness | Force Exponential | Damping | Penetration Depth | Friction | Static Coefficient | Dynamic Coefficient | Friction Transition Velocity | Stiction Transition Velocity |
|---|---|---|---|---|---|---|---|---|---|
| Impact | 2855 N/m | 1.1 | 10 N·s/mm | 0.57 mm | Coulomb | 0.8 | 0.75 | 0.1 | 10 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, Y.; Li, S.; Guo, M.; Yang, Y.; Xia, D.; Luo, X. Structural Design, Simulation and Experiment of Quadruped Robot. Appl. Sci. 2021, 11, 10705. https://doi.org/10.3390/app112210705
Shi Y, Li S, Guo M, Yang Y, Xia D, Luo X. Structural Design, Simulation and Experiment of Quadruped Robot. Applied Sciences. 2021; 11(22):10705. https://doi.org/10.3390/app112210705
Chicago/Turabian StyleShi, Yunde, Shilin Li, Mingqiu Guo, Yuan Yang, Dan Xia, and Xiang Luo. 2021. "Structural Design, Simulation and Experiment of Quadruped Robot" Applied Sciences 11, no. 22: 10705. https://doi.org/10.3390/app112210705
APA StyleShi, Y., Li, S., Guo, M., Yang, Y., Xia, D., & Luo, X. (2021). Structural Design, Simulation and Experiment of Quadruped Robot. Applied Sciences, 11(22), 10705. https://doi.org/10.3390/app112210705