
A Review of Bioinspired Vibration Control Technology


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
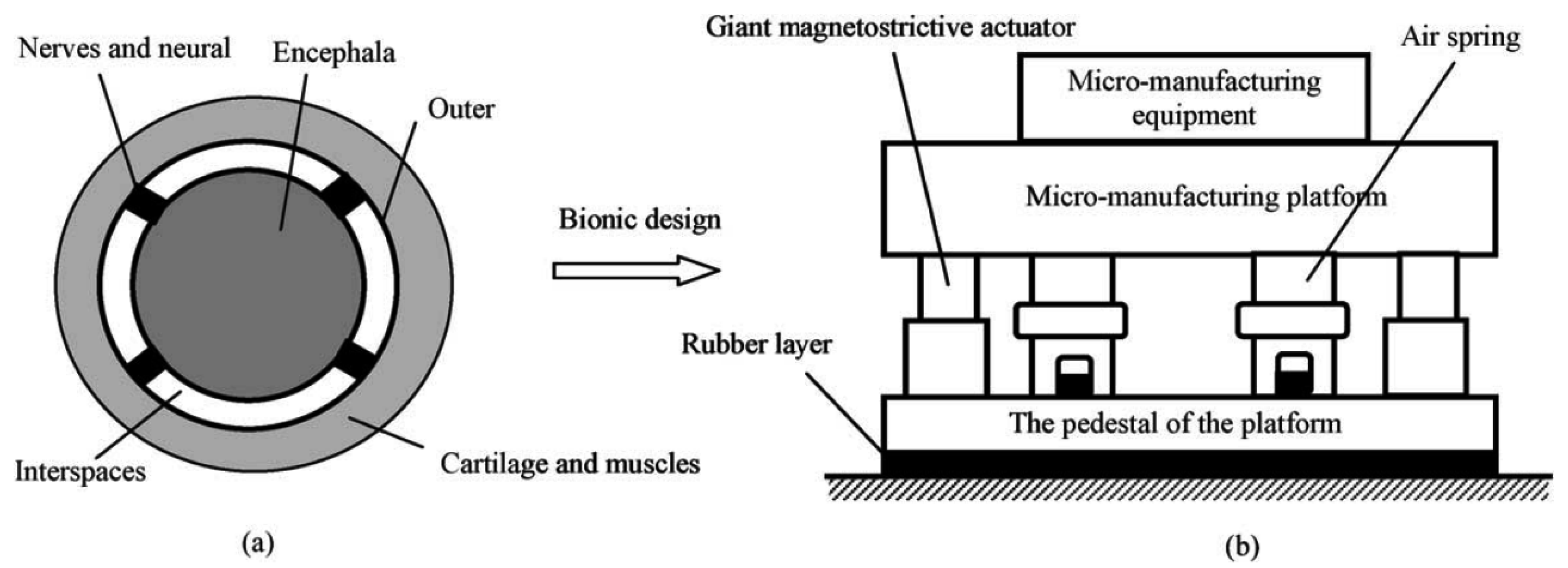
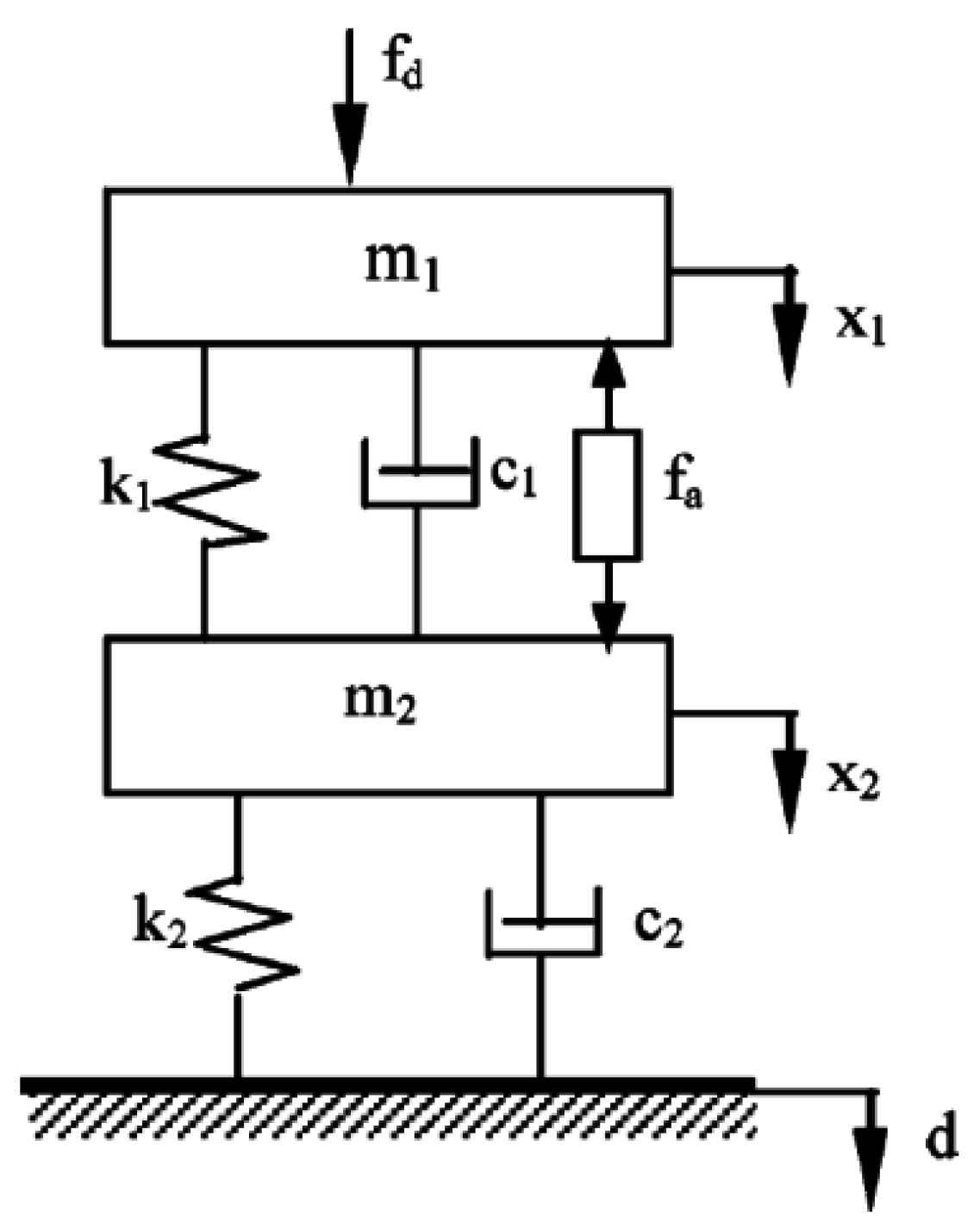
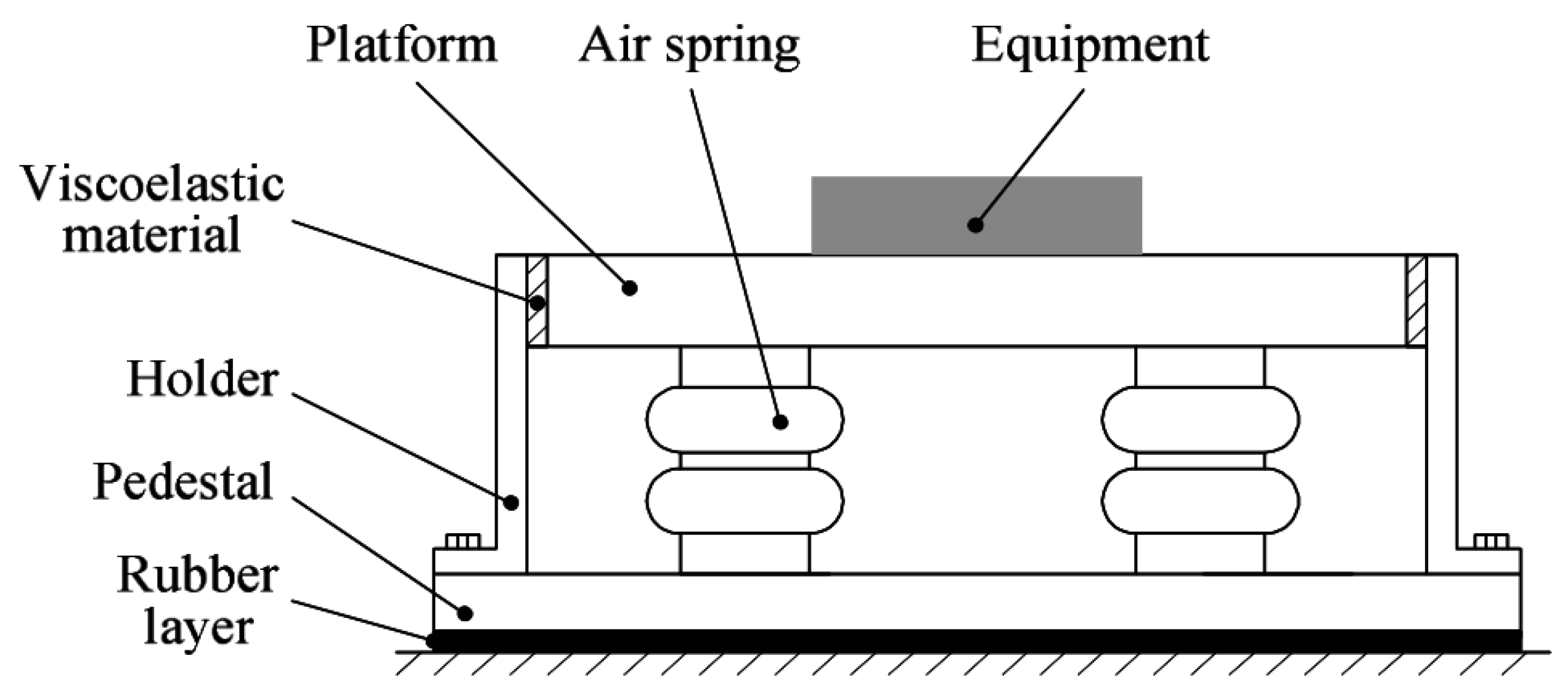
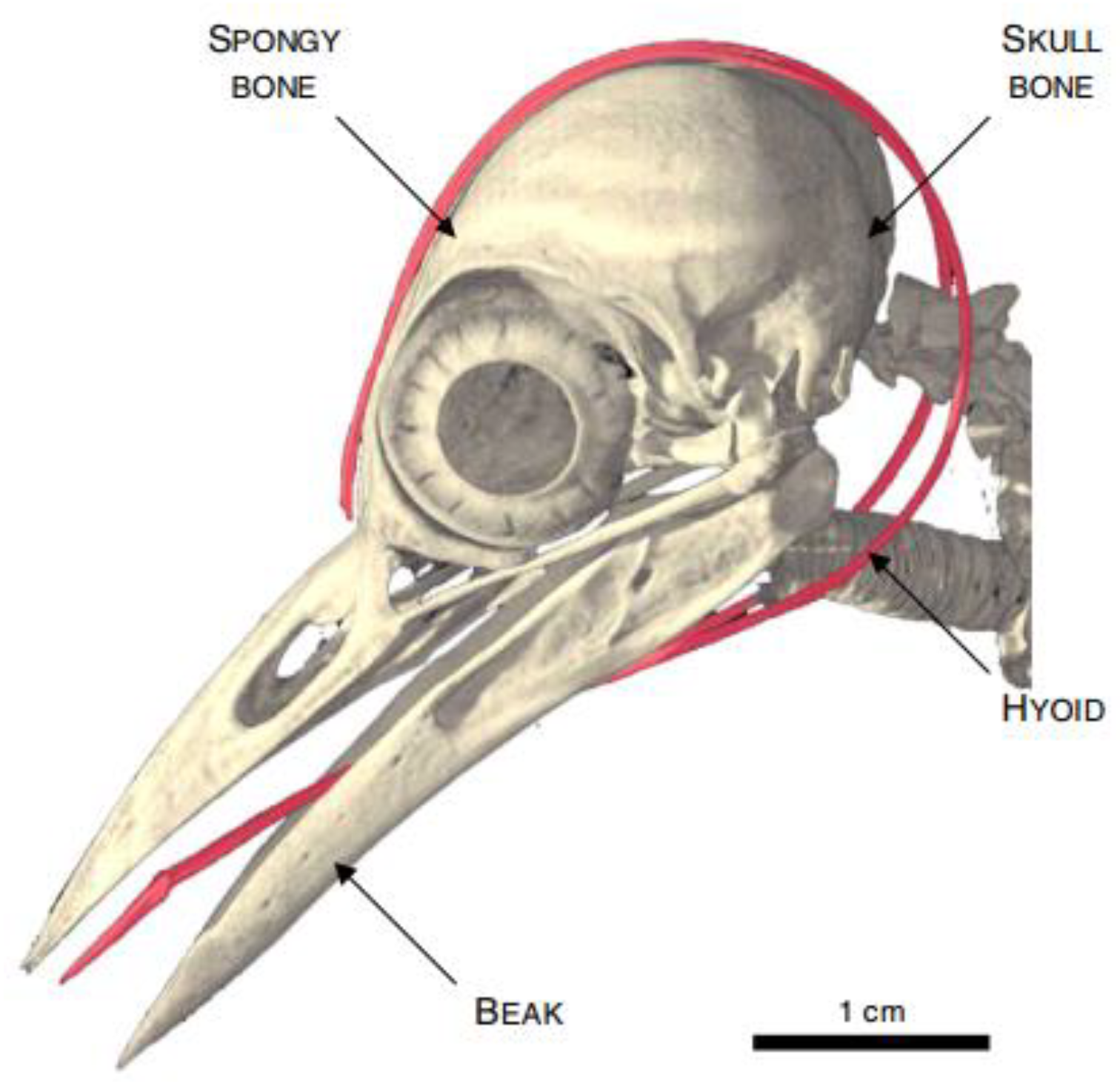
2. Bionic Devices Based on the Woodpecker’s Head
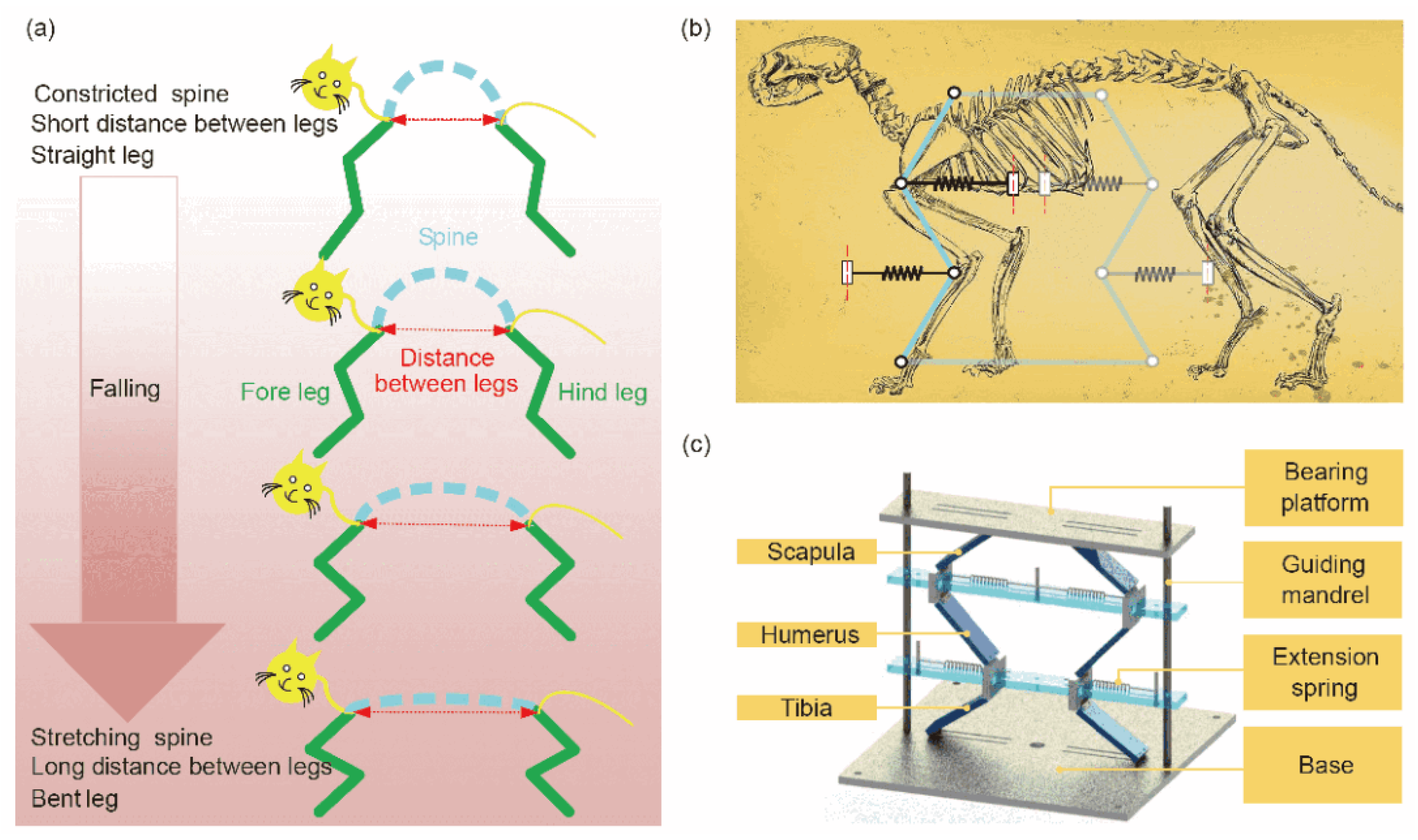
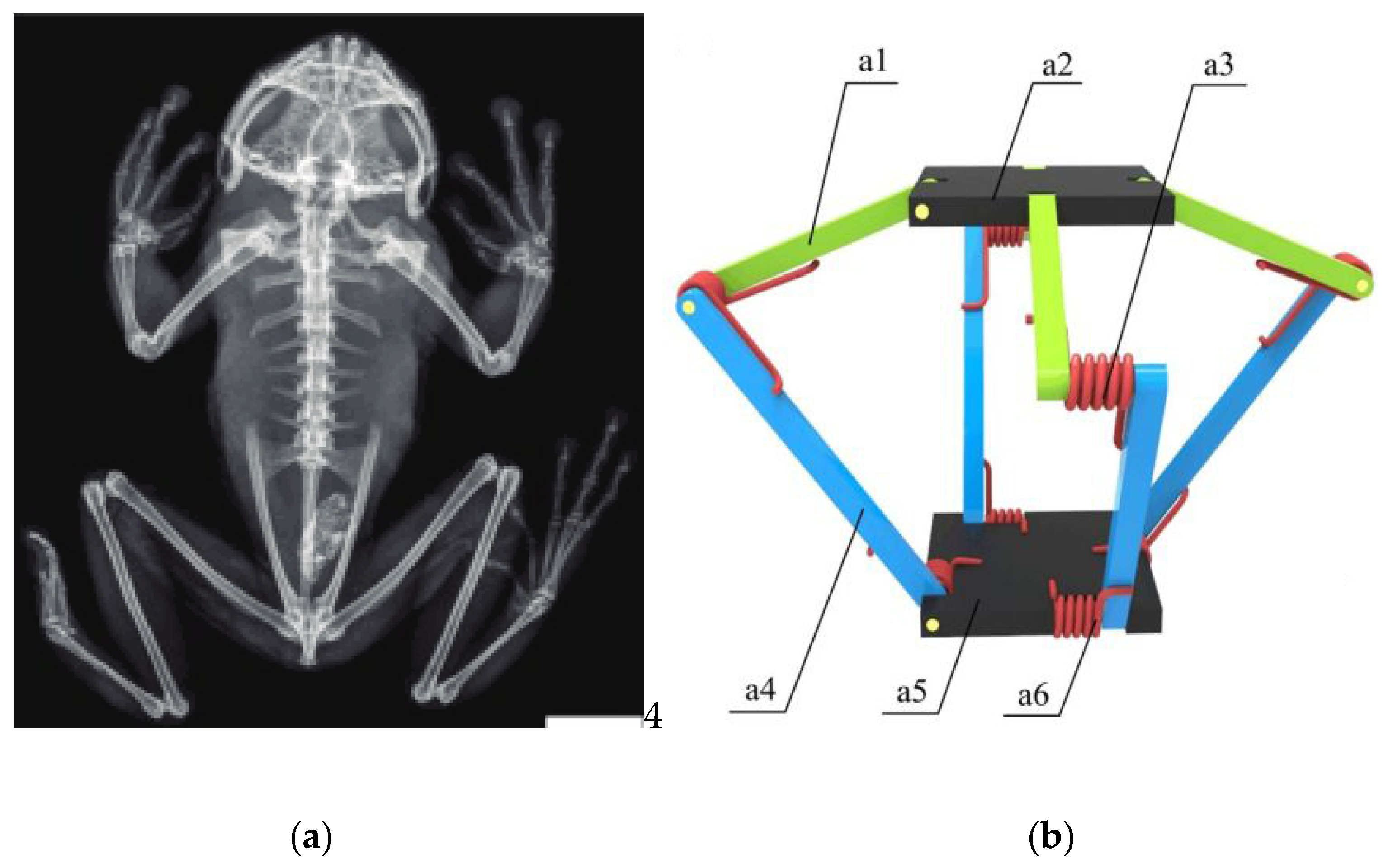
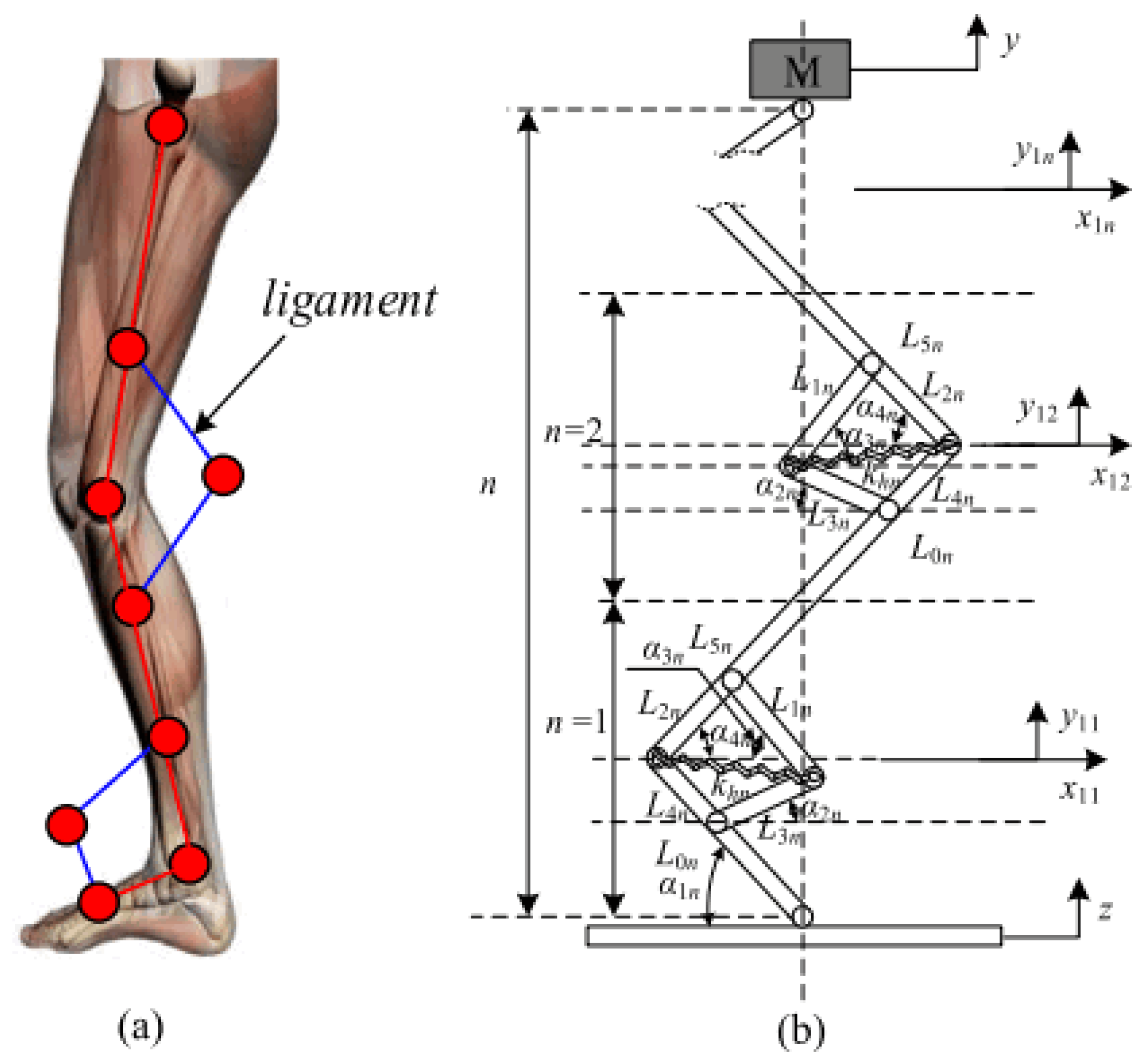
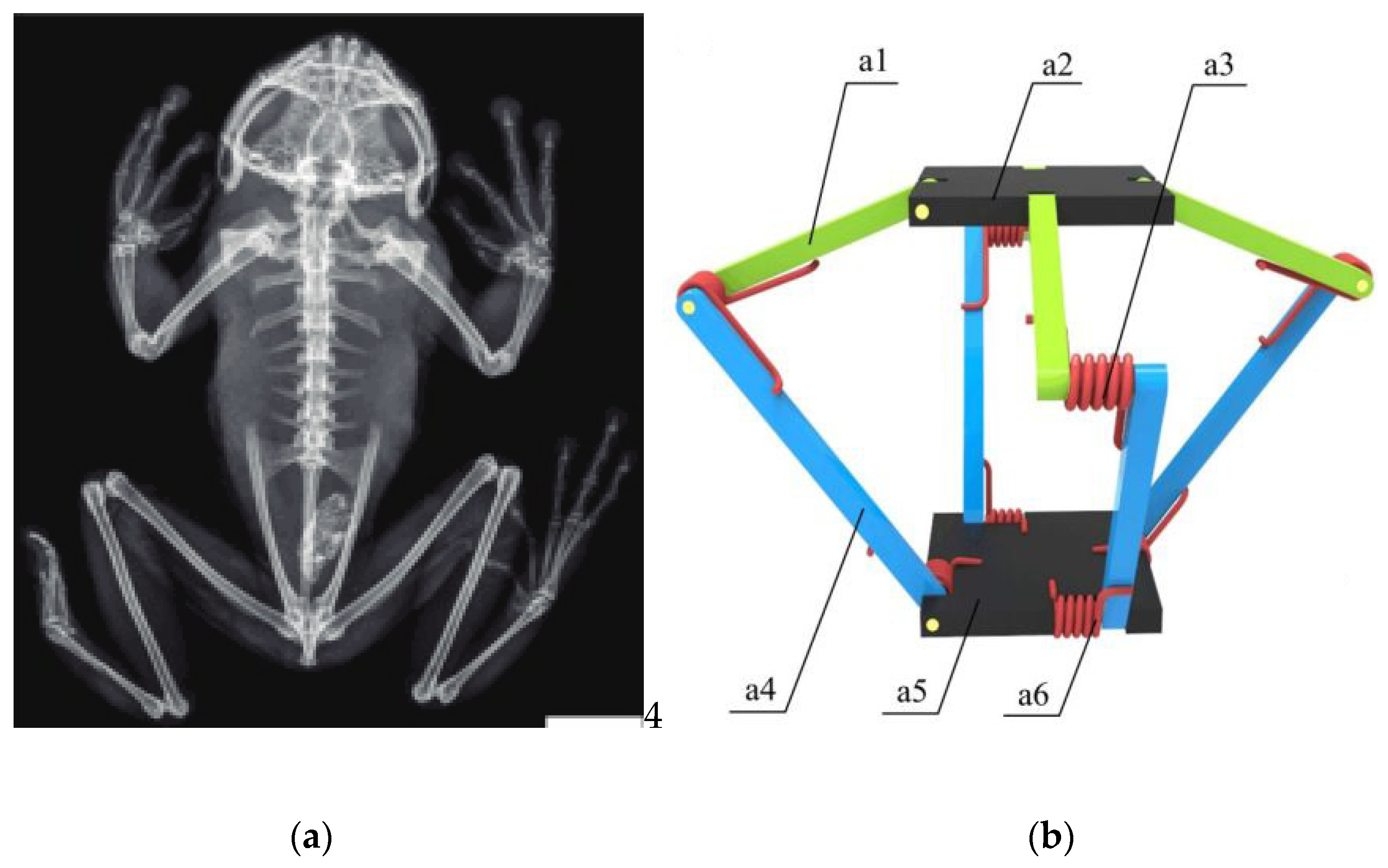
3. Bionic Devices Based on Animal Leg
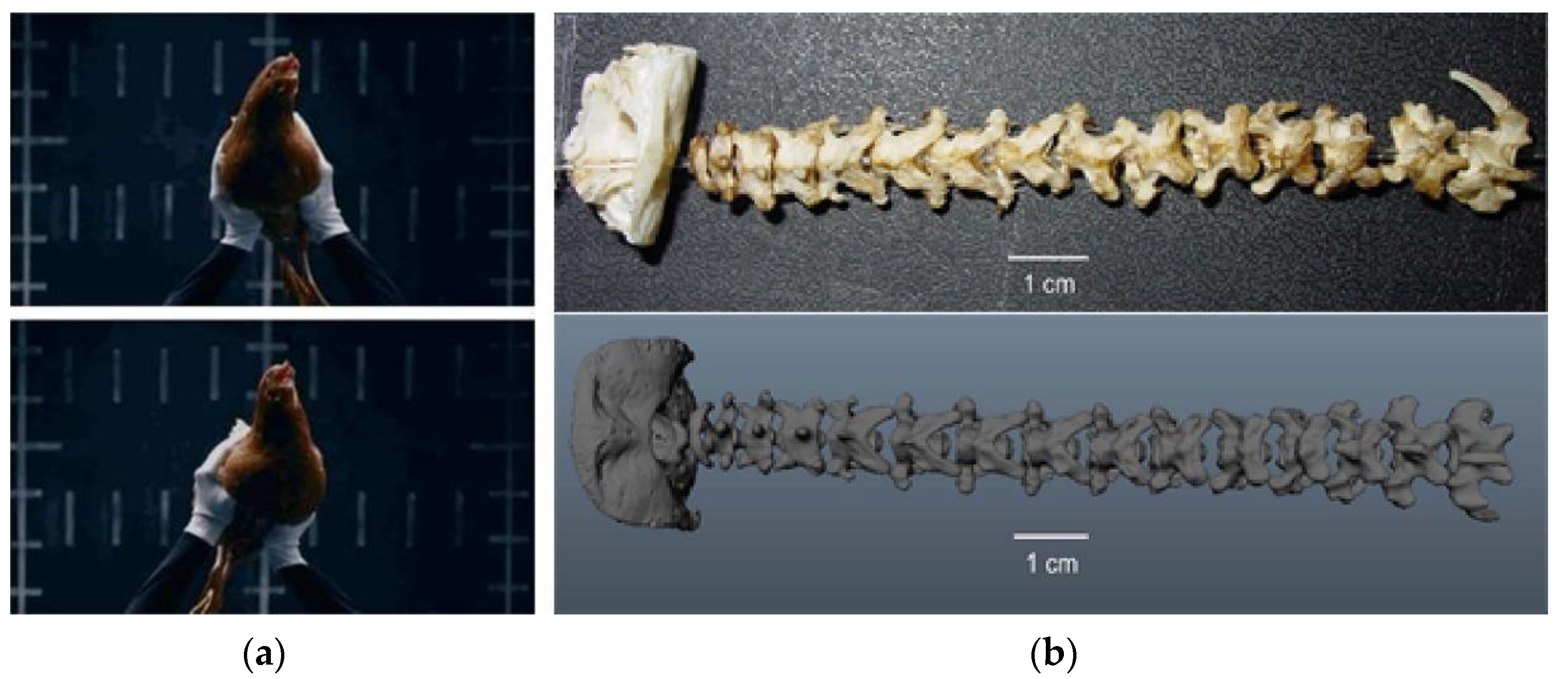
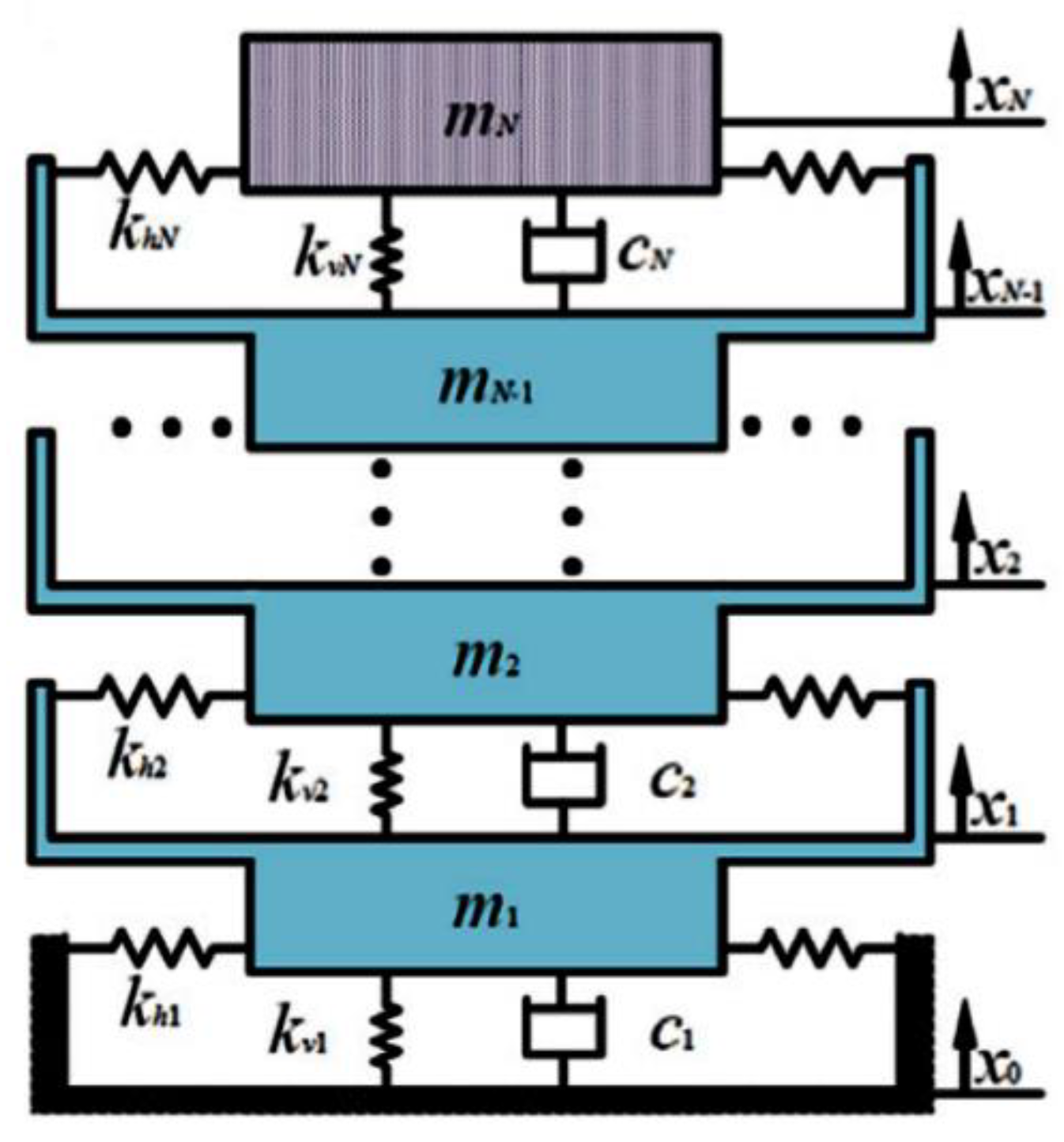
4. Other Bionic Vibration Control Devices
5. Challenges and Future Directions
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Maeda, S.; Taylor, M.D.; Anderson, L.C.; McLaughlin, J. Determination of hand-transmitted vibration risk on the human. Int. J. Ind. Ergon. 2019, 70, 28–37. [Google Scholar] [CrossRef]
- Bovenzi, M. Health effects of mechanical vibration. G. Ital. Med. Lav. Ergon. 2005, 27, 58–64. [Google Scholar]
- Johanning, E. Whole-body vibration-related health disorders in occupational medicine-An international comparison. Ergonomics 2015, 58, 1239–1252. [Google Scholar] [CrossRef]
- Vorobieva, V.V.; Shabanov, P.D. Tissue specific peculiarities of vibration-induced hypoxia of the rabbit heart, liver and kidney. Rev. Clin. Pharmacol. Drug Ther. 2016, 14, 46–62. [Google Scholar] [CrossRef]
- Lythgo, N.; Eser, P.; De Groot, P.; Galea, M. Whole-body vibration dosage alters leg blood flow. Clin. Physiol. Funct. Imaging 2010, 29, 53–59. [Google Scholar] [CrossRef]
- Bastos, M.D.G.A.; e Almeida Fagundes, A.; Arisawa, E.A.L.S. Acute effects of whole body vibration on heart rate variability in elderly people. J. Bodyw. Mov. Ther. 2017, 22, 618–621. [Google Scholar]
- Muhammad, B.B.; Wan, M.; Jia, F.; Wei-Hong, Z. Dynamic damping of machining vibration: A review. Int. J. Adv. Manuf. Technol. 2017, 89, 2935–2952. [Google Scholar] [CrossRef]
- Liu, L.; Ji, S.; Wang, Y.; Xu, C. Comprehensive Survey of Vibration Control Technology in Machining. Int. J. Hybrid Inf. Technol. 2015, 8, 307–316. [Google Scholar] [CrossRef]
- To, S.S.; Wang, V.H.; Lee, W.B. Tool-Tip Vibration at High Frequencies. In Materials Characterisation and Mechanism of Micro-Cutting in Ultra-Precision Diamond Turning; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Yang, Y.; Xu, D.; Liu, Q. Milling vibration attenuation by eddy current damping. Int. J. Adv. Manuf. Technol. 2015, 81, 445–454. [Google Scholar] [CrossRef]
- Xu, Z.D.; Xu, F.H.; Chen, X. Intelligent Vibration Isolation and Mitigation of a Platform by Using MR and VE Devices. J. Aerosp. Eng. 2016, 29, 04016010. [Google Scholar] [CrossRef]
- Gu, Z.W.; Zhong, T.Y.; Zhang, M.B.; Zhang, K. Impact and Control of Environmental Vibration on Precision Instruments. Appl. Mech. Mater. 2011, 50–51, 120–124. [Google Scholar] [CrossRef]
- Chen, L.; Zhang, W. Adaptive vibration reduction of an axially moving string via a tensioner. Int. J. Mech. Sci. 2006, 48, 1409–1415. [Google Scholar] [CrossRef]
- Chen, Y.; Wu, H.; Zhai, J.; Chen, H.; Zhu, Q.; Han, Q. Vibration reduction of the blisk by damping hard coating and its intentional mistuning design. Aerosp. Sci. Technol. 2019, 84, 1049–1058. [Google Scholar] [CrossRef]
- Xiao, W.; Yu, S.; Liu, L.; Zhang, F. Vibration reduction design of extension housing for printed circuit board based on particle damping materials. Appl. Acoust. 2020, 168, 107434. [Google Scholar] [CrossRef]
- Fan, H.; Yang, L.; Tian, Y.; Wang, Z. Design of metastructures with quasi-zero dynamic stiffness for vibration isolation. Compos. Struct. 2020, 243, 112244. [Google Scholar] [CrossRef]
- Tian, J.; Feng, H.; Wang, J.; Liu, Y. Research on vibration isolation method of a novel power source. Energy Rep. 2020, 6, 3278–3290. [Google Scholar] [CrossRef]
- Chang, Y.; Zhou, J.; Wang, K.; Xu, D. A quasi-zero-stiffness dynamic vibration absorber. J. Sound Vib. 2021, 494, 115859. [Google Scholar] [CrossRef]
- Zhong, R.; Zong, Z.; Pai, P.F.; Ruan, X. Multi-stopband negative stiffness composite column design for vibration absorption. Thin-Walled Struct. 2019, 144, 106330. [Google Scholar] [CrossRef]
- Sun, X.; Jing, X. Multi-direction vibration isolation with quasi-zero stiffness by employing geometrical nonlinearity. Mech. Syst. Signal Process. 2015, 62–63, 149–163. [Google Scholar] [CrossRef]
- Cheng, C.; Li, S.; Wang, Y.; Jiang, X. Force and displacement transmissibility of a quasi-zero stiffness vibration isolator with geometric nonlinear damping. Nonlinear Dyn. 2016, 87, 2267–2279. [Google Scholar] [CrossRef]
- Wang, K.; Zhou, J.; Chang, Y.; Ouyang, H.; Xu, D.; Yang, Y. A nonlinear ultra-low-frequency vibration isolator with dual quasi-zero-stiffness mechanism. Nonlinear Dyn. 2020, 101, 755–773. [Google Scholar] [CrossRef]
- Zheng, Z.; Yao, T.; Huang, P.; Chang, Z. Analysis of Energy Absorbing Device Based on Damped Dynamic Vibration Absorber. Trans. Can. Soc. Mech. Eng. 2016, 40, 457–467. [Google Scholar] [CrossRef]
- Saravanamurugan, S.; Alwarsamy, T.; Devarajan, K. Optimization of damped dynamic vibration absorber to control chatter in metal cutting process. J. Vib. Control 2015, 21, 949–958. [Google Scholar] [CrossRef]
- Lindell, H.; Berbyuk, V.; Josefsson, M.; Grétarsson, S.L. Nonlinear dynamic absorber to reduce vibration in hand-held impact machines. In Proceedings of the International Conference on Engineering Vibration, Ljubljana, Slovenia, 7–10 September 2015; Boltežar, M., Slavič, J., Wiercigroch, M., Eds.; EBook. Faculty for Mechanical Engineering: Ljubljana, Slovenia, 2015. [Google Scholar]
- Zhu, X.; Chen, Z.; Jiao, Y.; Zhu, X. Optimization method for distributed dynamic vibration absorbers applied in vibration reduction of damped thin plate structures. J. Vib. Shock. 2019, 38, 75–79. [Google Scholar]
- Sarah, G.; Hammoud, M.; Hallal, A.; Khachfe, H. Tremor Reduction at the Palm of a Parkinson’s Patient Using Dynamic Vibration Absorber. Bioengineering 2016, 3, 18. [Google Scholar]
- Komatsuzaki, T.; Iwata, Y. Design of a Real-Time Adaptively Tuned Dynamic Vibration Absorber with a Variable Stiffness Property Using Magnetorheological Elastomer. Shock Vib. 2015, 2015, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Chen, Z.M.; Peng, W.; Jiang-hua, F.; Bao, C. Application of SA-PSO Algorithm in Parameter Optimization of Dynamic Vibration Absorber. IOP Conf. Ser. Earth Environ. Sci. 2019, 267, 042174. [Google Scholar]
- Lande, R.; Arnold, S.J. The measurement of selection on correlated characters. Evolution 1983, 37, 1210–1226. [Google Scholar] [CrossRef]
- Sterelny, K.; Griffiths, P.E. Sex and Death: An Introduction to Philosophy of Biology; University of Chicago Press: Chicago, IL, USA, 2012. [Google Scholar]
- May, P.R.; Fuster, J.M.; Haber, J.; Hirschman, A. Woodpecker drilling behavior: An endorsement of the rotational theory of impact brain injury. Arch. Neurol. 1979, 36, 370–373. [Google Scholar] [CrossRef]
- May, P.A.; Newman, P.; Fuster, J.; Hirschman, A. Woodpeckers and head injury. Lancet 1976, 307, 454–455. [Google Scholar] [CrossRef]
- Mei, D.; Yang, K.; Chen, Z. Design of an ultra-precision vibration isolation system by imitating the special organic texture of woodpecker’s brain. In Proceedings of the IEEE Conference on Robotics, Automation and Mechatronics, Singapore, 1–3 December 2004. [Google Scholar]
- Gibson, L.J. Woodpecker pecking: How woodpeckers avoid brain injury. J. Zool. 2006, 270, 462–465. [Google Scholar] [CrossRef]
- Bian, J.; Jing, X. Biomimetic design of woodpecker for shock and vibration protection. In Proceedings of the 2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014), Bali, Indonesia, 5–10 December 2014. [Google Scholar]
- Wang, L.; Lu, S.; Liu, X.; Niu, X.; Wang, C.; Ni, Y.; Fan, Y. Biomechanism of impact resistance in the woodpecker’s head and its application. Sci. China Life Sci. 2013, 56, 715–719. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yan, G.; Wang, S.; Zou, H.; Zhao, L.; Gao, Q.; Zhang, W. Bio-inspired polygonal skeleton structure for vibration isolation: Design, modelling, and experiment. Sci. China Technol. Sci. 2020, 63, 2617–2630. [Google Scholar] [CrossRef]
- Wang, Y.; Jing, X.; Guo, Y. Nonlinear analysis of a bio-inspired vertically asymmetric isolation system under different structural constraints. Nonlinear Dyn. 2019, 95, 445–464. [Google Scholar] [CrossRef]
- Wang, Y.; Jing, X.; Dai, H.; Li, F.M. Subharmonics and ultra-subharmonics of a bio-inspired nonlinear isolation system. Int. J. Mech. Sci. 2019, 152, 167–184. [Google Scholar] [CrossRef]
- Liu, C.; Jing, X.; Li, F. Vibration isolation using a hybrid lever-type isolation system with an X-shape supporting structure. Int. J. Mech. Sci. 2015, 98, 169–177. [Google Scholar] [CrossRef]
- Zhang, C.L.; Mei, D.Q.; Chen, Z.C. Active vibration isolation of a micro-manufacturing platform based on a neural network. J. Mater. Process. Technol. 2002, 129, 634–639. [Google Scholar] [CrossRef]
- Li, G.; Zhang, C. Active vibration control of a isolation platform based on state space LQG. In Proceedings of the 2005 IEEE International Conference on Robotics and Biomimetics—ROBIO, Hong Kong, China, 5–9 July 2005. [Google Scholar]
- Lv, H.Q.; Tang, W.X.; Song, Q.H. Dynamic Analysis of Bionic Vibration Isolation Platform Based on Viscoelastic Materials. In Advanced Materials Research; Trans Tech Publications Ltd.: Stafa-Zurich, Switzerland, 2014. [Google Scholar]
- Yoon, S.; Park, S. A mechanical analysis of woodpecker drumming and its application to shock-absorbing systems. Bioinspir. Biomim. 2011, 6, 016003. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Schwab, I.R. Cure for a headache. Br. J. Ophthalmol. 2002, 86, 843. [Google Scholar] [CrossRef]
- Oda, J.; Sakamoto, J.; Sakano, K. Mechanical Evaluation of the Skeletal Structure and Tissue of the Woodpecker and Its Shock Absorbing System. JSME Int. J. Ser. A 2006, 49, 390–396. [Google Scholar] [CrossRef] [Green Version]
- Yoon, S.H.; Roh, J.E.; Kim, K.L. Woodpecker-inspired shock isolation by microgranular bed. J. Phys. D Appl. Phys. 2009, 42, 035501. [Google Scholar] [CrossRef]
- Wu, Z.; Jing, X.; Bian, J.; Li, F.; Allen, R. Vibration isolation by exploring bio-inspired structural nonlinearity. Bioinspir. Biomim. 2015, 10, 056015. [Google Scholar] [CrossRef]
- Sun, X.; Jing, X.; Xu, J.; Cheng, L. Vibration isolation via a scissor-like structured platform. J. Sound Vib. 2014, 333, 2404–2420. [Google Scholar] [CrossRef]
- Wu, Z.; Jing, X.; Sun, B.; Li, F. A 6DOF passive vibration isolator using X-shape supporting structures. J. Sound Vib. 2016, 380, 90–111. [Google Scholar] [CrossRef]
- Dai, H.; Jing, X.; Wang, Y.; Yue, X.; Yuan, J. Post-capture vibration suppression of spacecraft via a bio-inspired isolation system. Mech. Syst. Signal Process. 2018, 105, 214–240. [Google Scholar] [CrossRef]
- Hu, F.; Jing, X. A 6-DOF passive vibration isolator based on Stewart structure with X-shaped legs. Nonlinear Dyn. 2018, 91, 157–185. [Google Scholar] [CrossRef]
- Ling, X.; Zhang, L.; Feng, X.; Sun, B.; Li, Q. A novel bio-inspired anti-vibration structure for operating hand-held jackhammers. Mech. Syst. Signal Process. 2019, 118, 317–339. [Google Scholar]
- Matsumoto, Y.; Griffin, M.J. Dynamic response of the standing human body exposed to vertical vibration: Influence of posture and vibration magnitude. J. Sound Vib. 1998, 212, 85–107. [Google Scholar] [CrossRef]
- Jiang, G.; Jing, X.; Guo, Y. A novel bio-inspired multi-joint anti-vibration structure and its nonlinear HSLDS properties. Mech. Syst. Signal Process. 2020, 138, 106552. [Google Scholar] [CrossRef]
- Wu, X.; Pei, B.; Pei, Y.; Wu, N.; Zhou, K.; Hao, Y.; Wang, W. Contributions of Limb Joints to Energy Absorption during Landing in Cats. Appl. Bionics Biomech. 2019, 2019, 1–13. [Google Scholar] [CrossRef]
- Zhang, Z.; Yu, H.; Yang, J.; Wang, L.; Yang, L. How cat lands: Insights into contribution of the forelimbs and hindlimbs to attenuating impact force. Chin. Sci. Bull. 2014, 59, 3325–3332. [Google Scholar] [CrossRef]
- Silva-Soares, T.; Mônico, A.T. Hind limb malformation in the tree frog Corythomantis greeningi (Anura: Hylidae). Phyllomedusa J. Herpetol. 2017, 16, 117–120. [Google Scholar] [CrossRef] [Green Version]
- Zeng, R.; Wen, G.; Ding, H.; Lu, Z.Q.; Chen, L.Q. A limb-inspired bionic quasi-zero stiffness vibration isolator. Acta Mech. Sin. 2021, 37, 1152–1167. [Google Scholar] [CrossRef]
- Dunlap, K.; Mowrer, O.H. Head movements and eye functions of birds. J. Comp. Psychol. 1930, 11, 99–113. [Google Scholar] [CrossRef] [Green Version]
- Troje, N.F.; Frost, B.J. Head-bobbing in pigeons: How stable is the hold phase? J. Exp. Biol. 2000, 203 Pt 5, 935. [Google Scholar] [CrossRef] [PubMed]
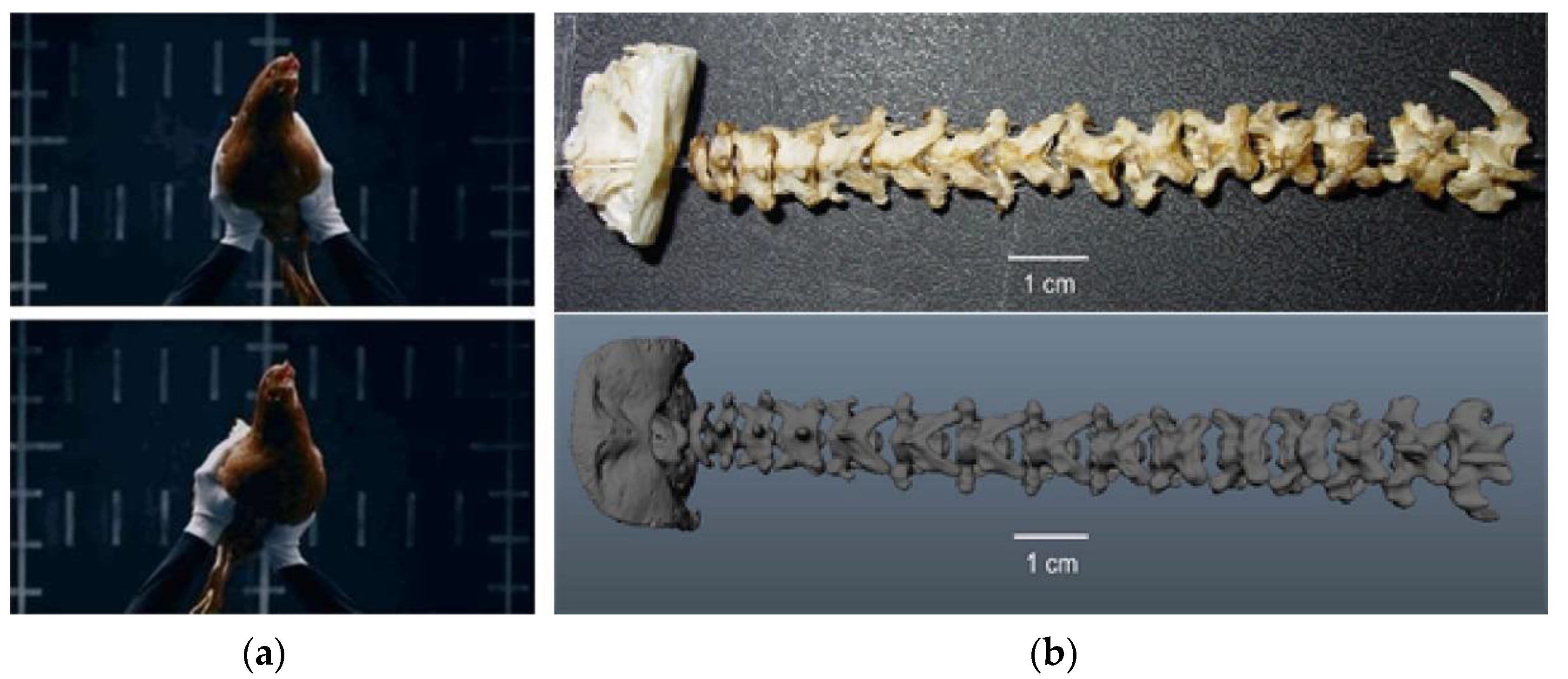
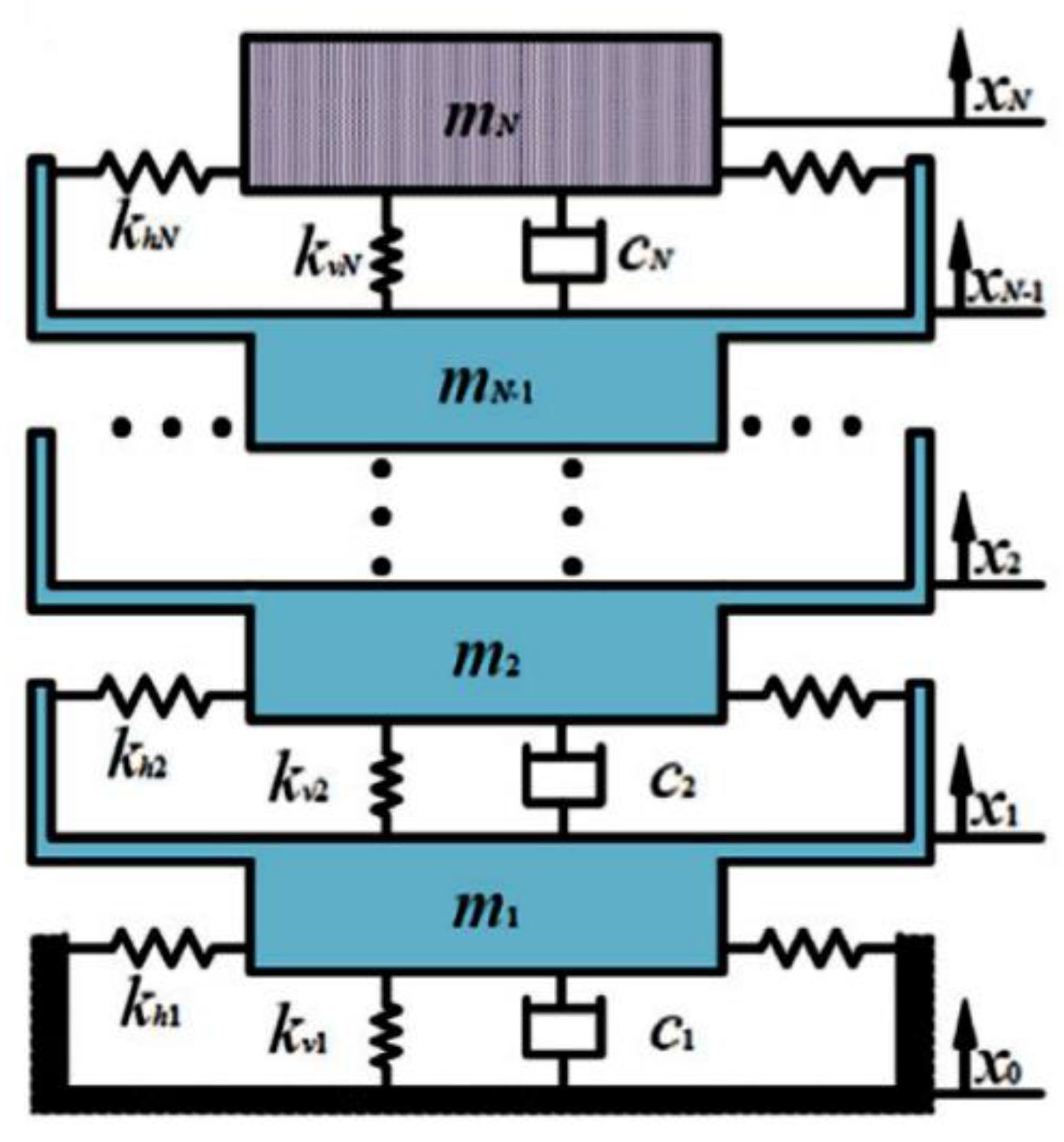
- Deng, T.; Wen, G.; Ding, H.; Lu, Z.Q.; Chen, L.Q. A bio-inspired isolator based on characteristics of quasi-zero stiffness and bird multi-layer neck. Mech. Syst. Signal Process. 2020, 145, 106967. [Google Scholar] [CrossRef]
- Krings, M.; Nyakatura, J.A.; Fischer, M.S.; Wagner, H. The Cervical Spine of the American Barn Owl (Tyto furcata pratincola): I. Anatomy of the Vertebrae and Regionalization in Their S-Shaped Arrangement. PLoS ONE 2014, 9, e91653. [Google Scholar] [CrossRef] [Green Version]
- Smeathers, J.E. Measurement of transmissibility for the human spine during walking and running. Clin. Biomech. 1989, 4, 34–40. [Google Scholar] [CrossRef]
- Paddan, G.S.; Griffin, M.J. The Transmission Of Translational Floor Vibration To The Heads Of Standing Subjects. J. Sound Vib. 1993, 160, 503–521. [Google Scholar] [CrossRef]
- Collins, S.H.; Adamczyk, P.G.; Kuo, A.D. Dynamic arm swinging in human walking. Proc. R. Soc. B Biol. Sci. 2009, 276. [Google Scholar] [CrossRef] [Green Version]
- Ortega, J.D.; Fehlman, L.A.; Farley, C.T. Effects of aging and arm swing on the metabolic cost of stability in human walking. J. Biomech. 2008, 41, 3303–3308. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Feng, X.; Jing, X. Human body inspired vibration isolation: Beneficial nonlinear stiffness, nonlinear damping & nonlinear inertia. Mech. Syst. Signal Process. 2019, 117, 786–812. [Google Scholar]
- Coermann, R.R. The mechanical impedance of the human body in sitting and standing position at low frequencies. Hum. Factors 1962, 4, 227. [Google Scholar] [CrossRef]
- Feng, X.; Jing, X.; Xu, Z.; Guo, Y. Bio-inspired anti-vibration with nonlinear inertia coupling. Mech. Syst. Signal Process. 2019, 124, 562–595. [Google Scholar] [CrossRef]
- Abo Sabah, S.H.; Kueh, A.B.H.; Al-Fasih, M.Y. Comparative low-velocity impact behavior of bio-inspired and conventional sandwich composite beams. Compos. Sci. Technol. 2017, 149, 64–74. [Google Scholar] [CrossRef]
- Gierke, H.E.V.; Keidel, W.D.; Oestreicher, H.L. Principles and Practice of Bionics; Technivision Services: London, UK, 1970. [Google Scholar]
- Donaldson, N.; Brindley, G.S. The Historical Foundations of Bionics. Engineering 2016, 1–37. [Google Scholar] [CrossRef]
- Nachtigall, W.; Wisser, A. Bionics by Examples; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar]
- Barthlott, W.; Rafiqpoor, M.D.; Erdelen, W.R. Bionics and Biodiversity-Bio-inspired Technical Innovation for a Sustainable Future. In Biomimetic Research for Architecture and Building Construction: Biological Design and Integrative Structures; Knippers, J., Nickel, K.G., Speck, T., Knippers, J., Nickel, K.G., Speck, T., Eds.; Springer International Publishing: Cham, Switzerland, 2016; pp. 11–55. [Google Scholar]
- Cohen, Y.H.; Reich, Y. Biomimetic Design Method for Innovation and Sustainability; Springer: Berlin/Heidelberg, Germany, 2016; Volume 10. [Google Scholar]








Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, X.; Chen, T.; Zhang, J.; Su, B.; Cong, Q.; Tian, W. A Review of Bioinspired Vibration Control Technology. Appl. Sci. 2021, 11, 10584. https://doi.org/10.3390/app112210584
Shi X, Chen T, Zhang J, Su B, Cong Q, Tian W. A Review of Bioinspired Vibration Control Technology. Applied Sciences. 2021; 11(22):10584. https://doi.org/10.3390/app112210584
Chicago/Turabian StyleShi, Xiaojie, Tingkun Chen, Jinhua Zhang, Bo Su, Qian Cong, and Weijun Tian. 2021. "A Review of Bioinspired Vibration Control Technology" Applied Sciences 11, no. 22: 10584. https://doi.org/10.3390/app112210584
APA StyleShi, X., Chen, T., Zhang, J., Su, B., Cong, Q., & Tian, W. (2021). A Review of Bioinspired Vibration Control Technology. Applied Sciences, 11(22), 10584. https://doi.org/10.3390/app112210584