
Interval Type-2 Fuzzy Logic Control-Based Frequency Control of Hybrid Power System Using DMGS of PI Controller


Abstract
:1. Introduction
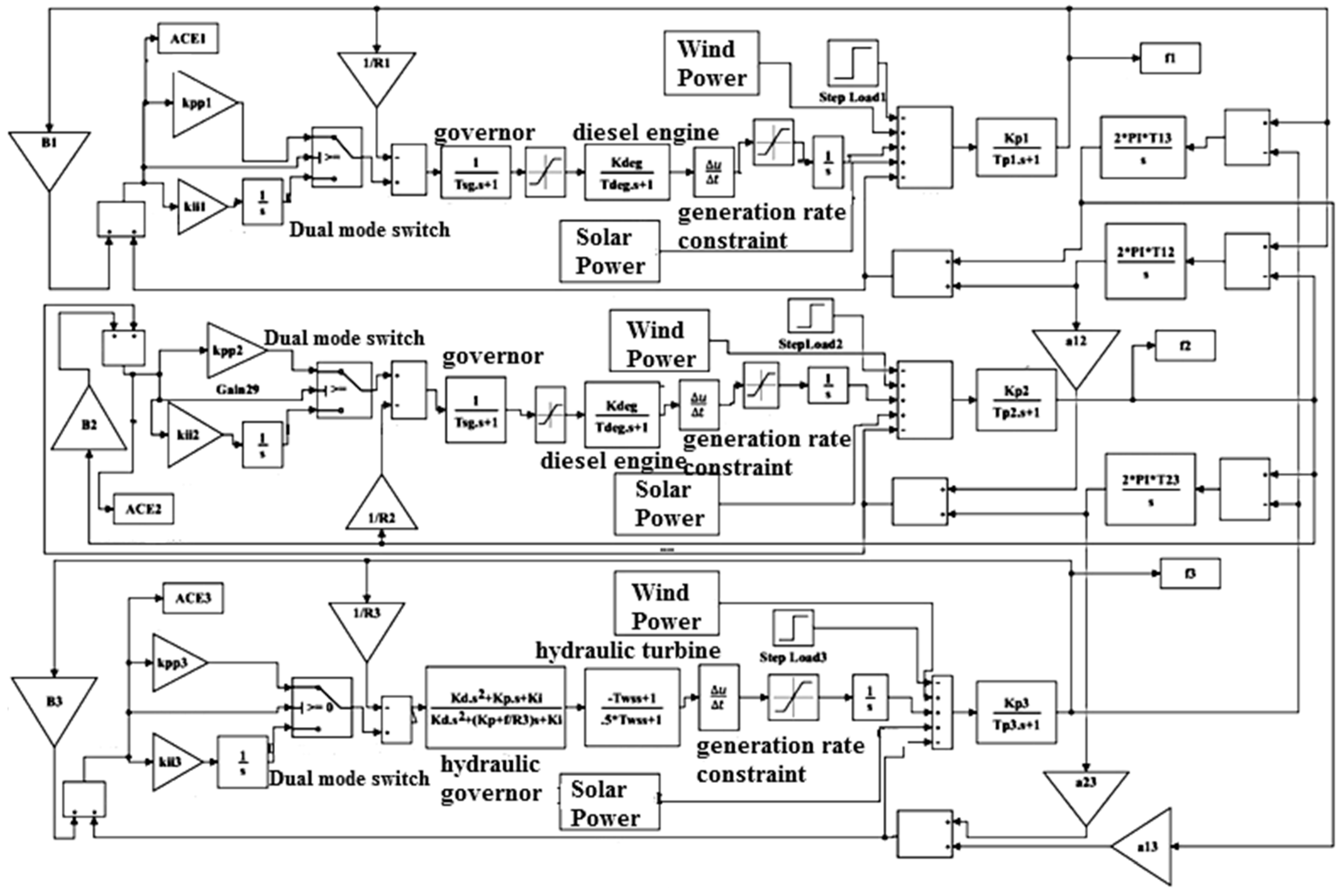
2. System Description and Modeling of Proposed Nonlinear Interconnected Power System
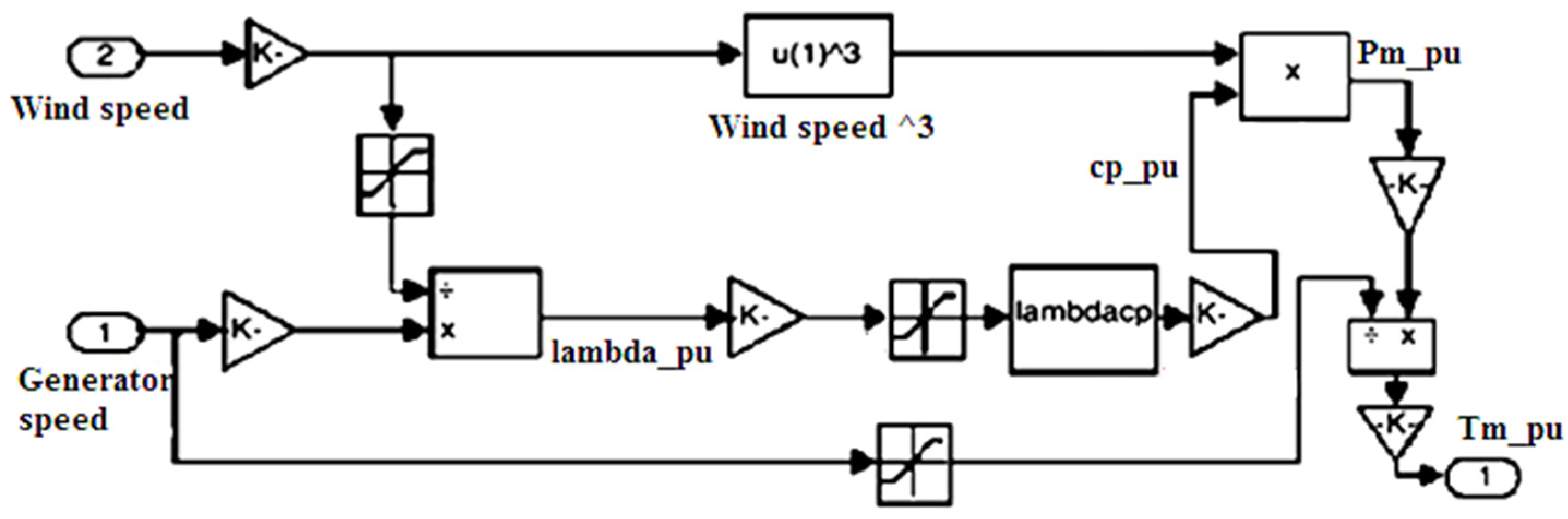
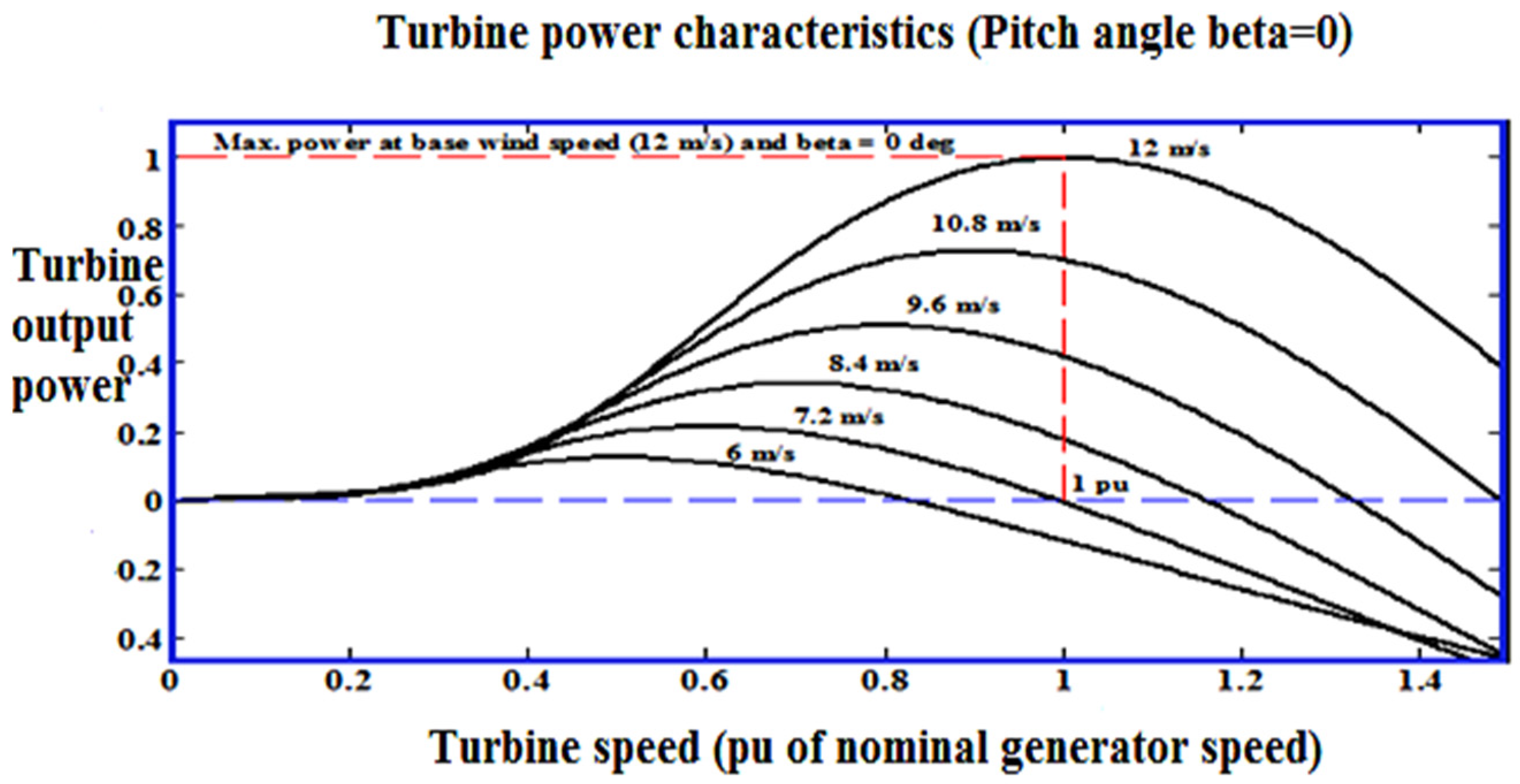
2.1. Wind Turbine Model
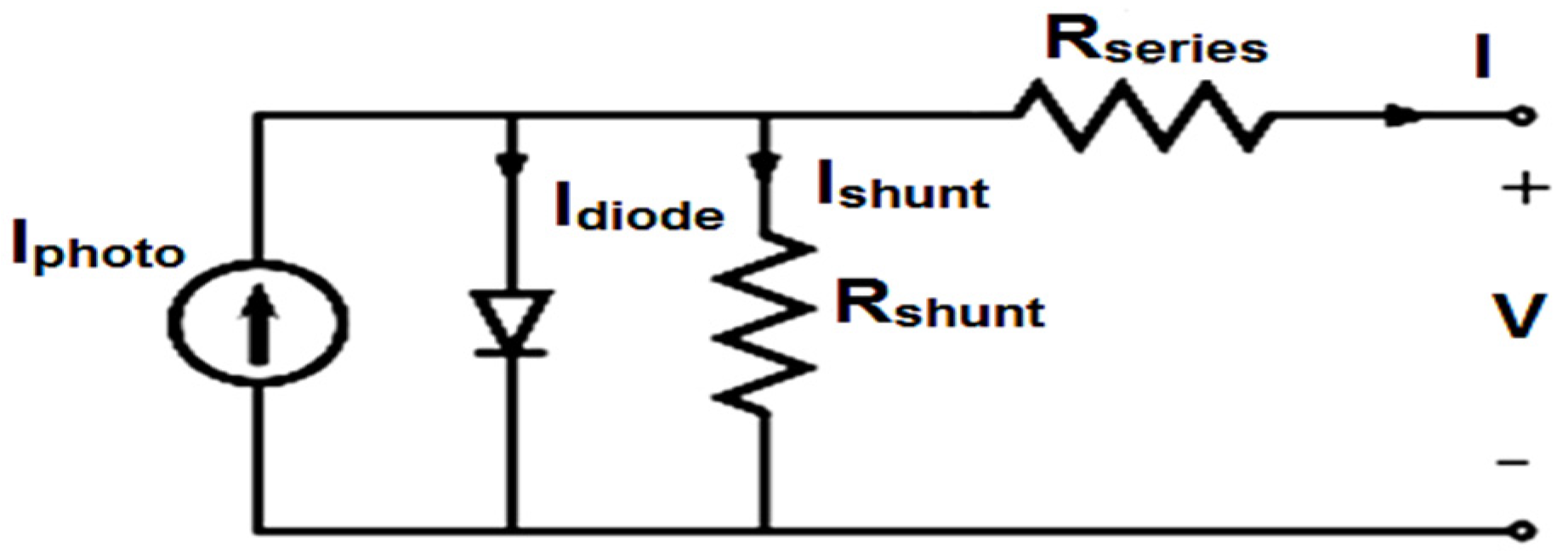
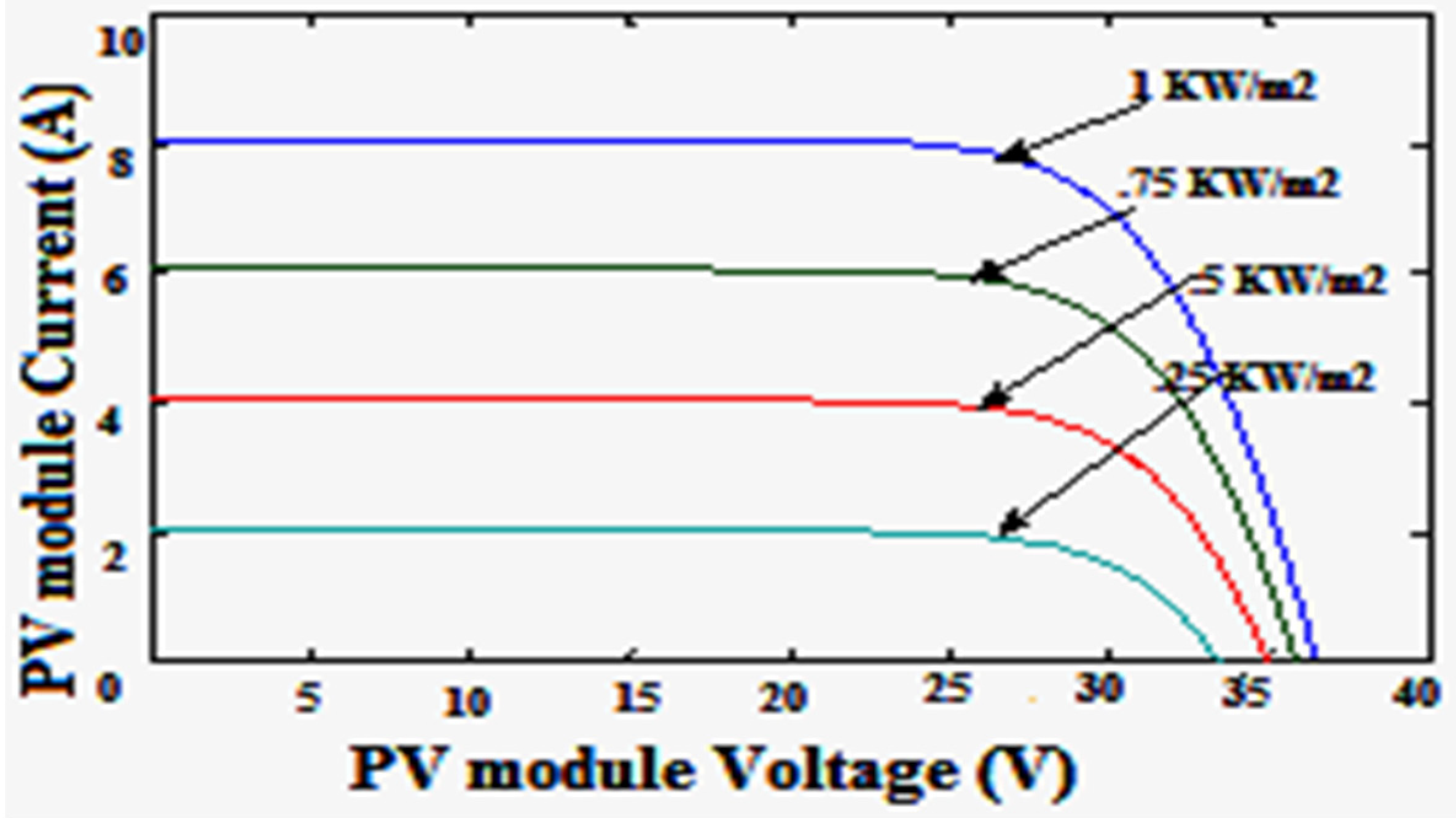
2.2. Photovoltaic Model
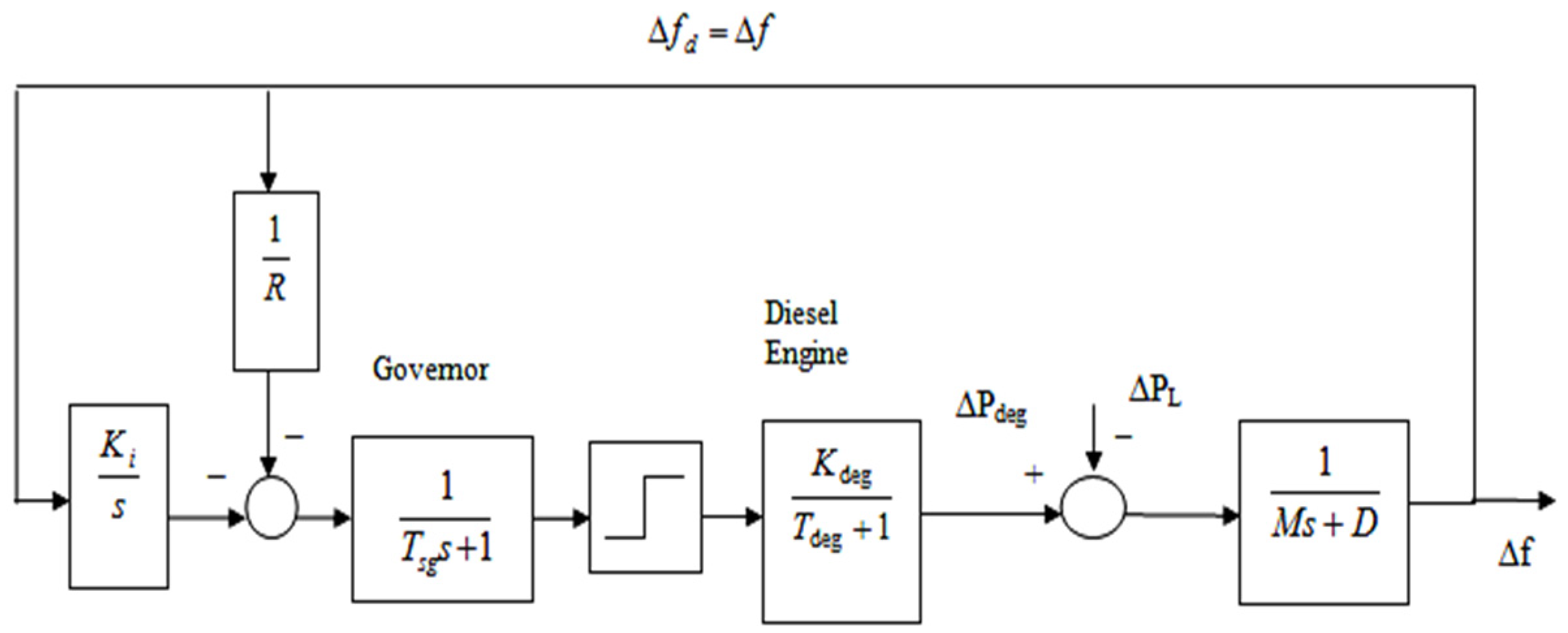
2.3. Diesel Engine Generator (DEG) Model
2.4. Hydro Model
3. IT2FLS and Its Application in the Proposed Test System
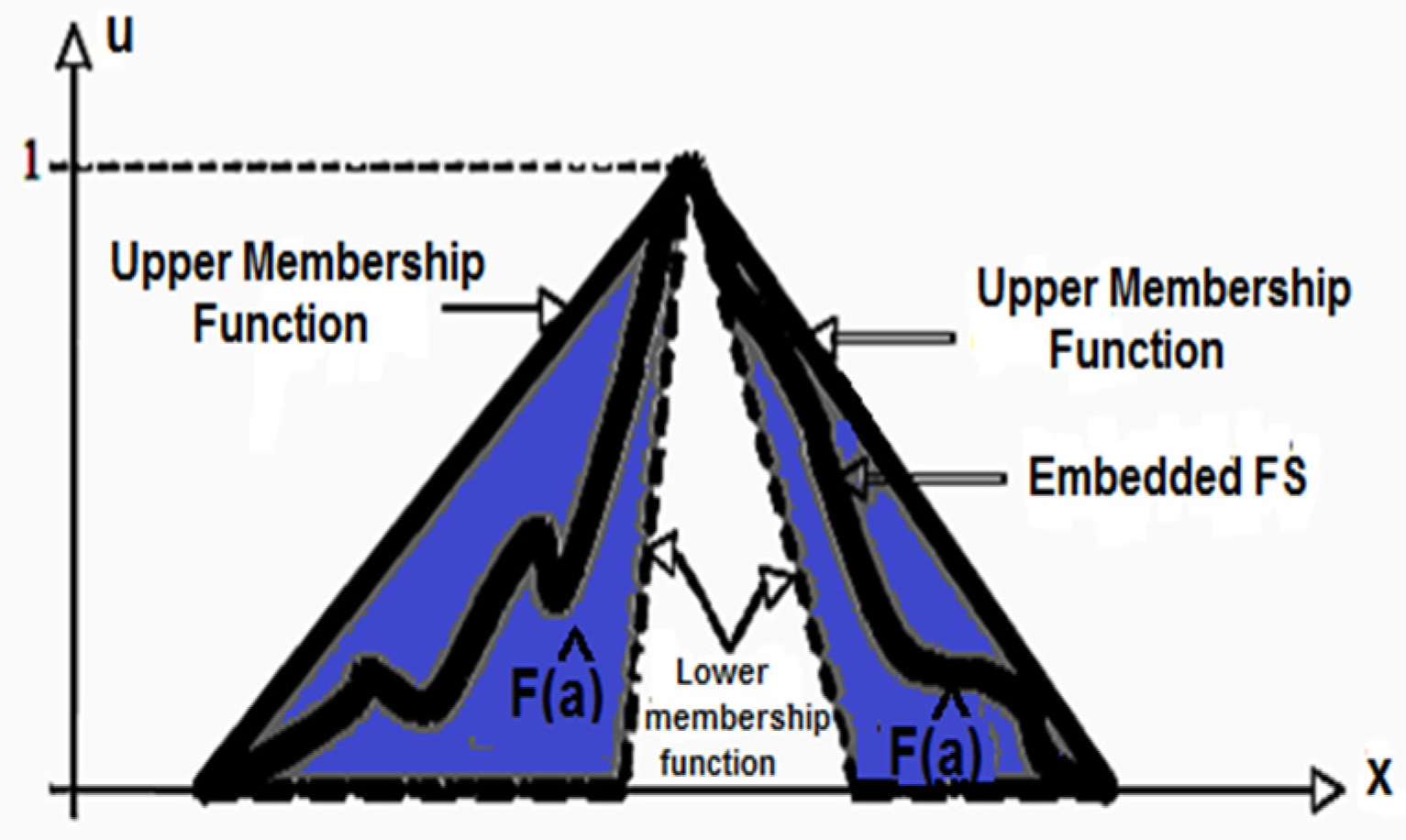
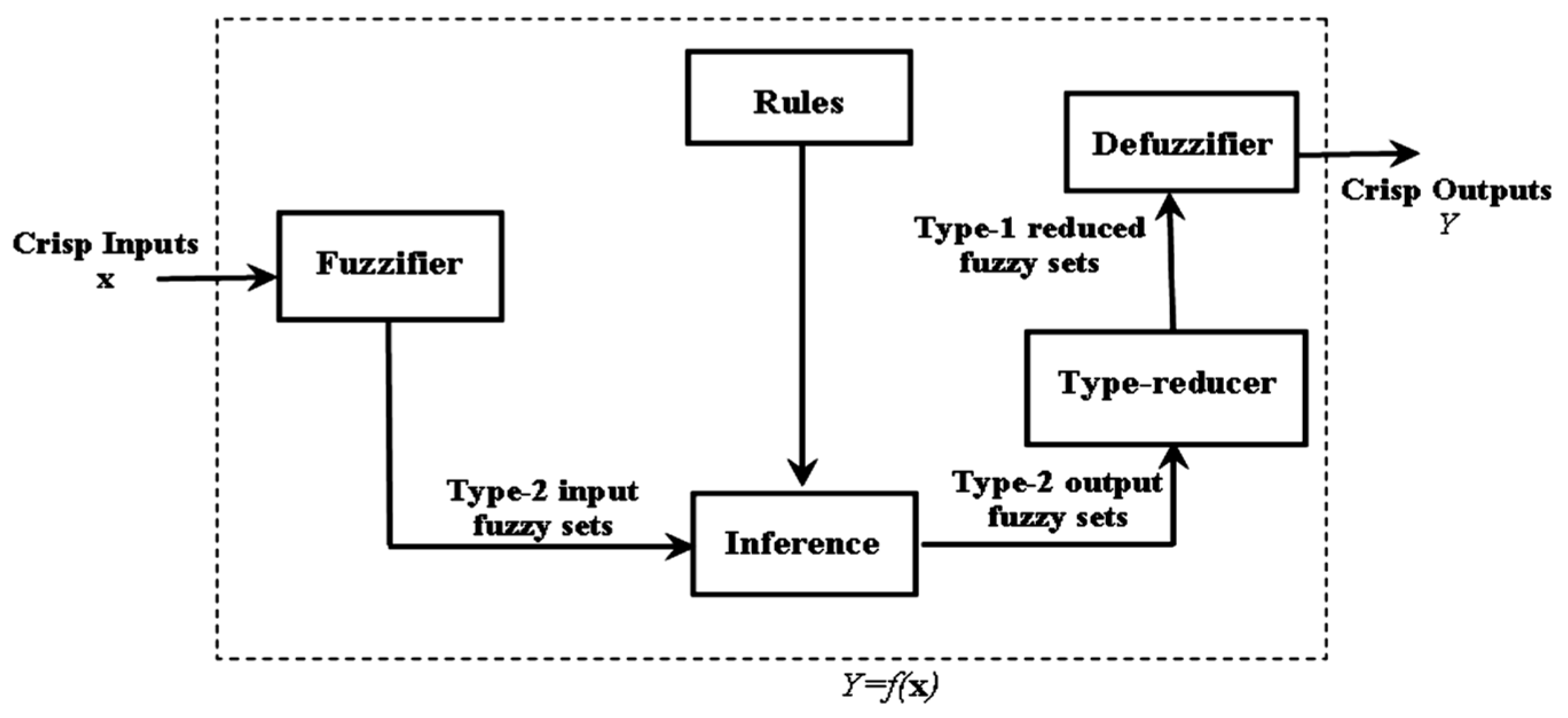
3.1. IT2FLSs and Interval Type-2 Fuzzy Logic Controller
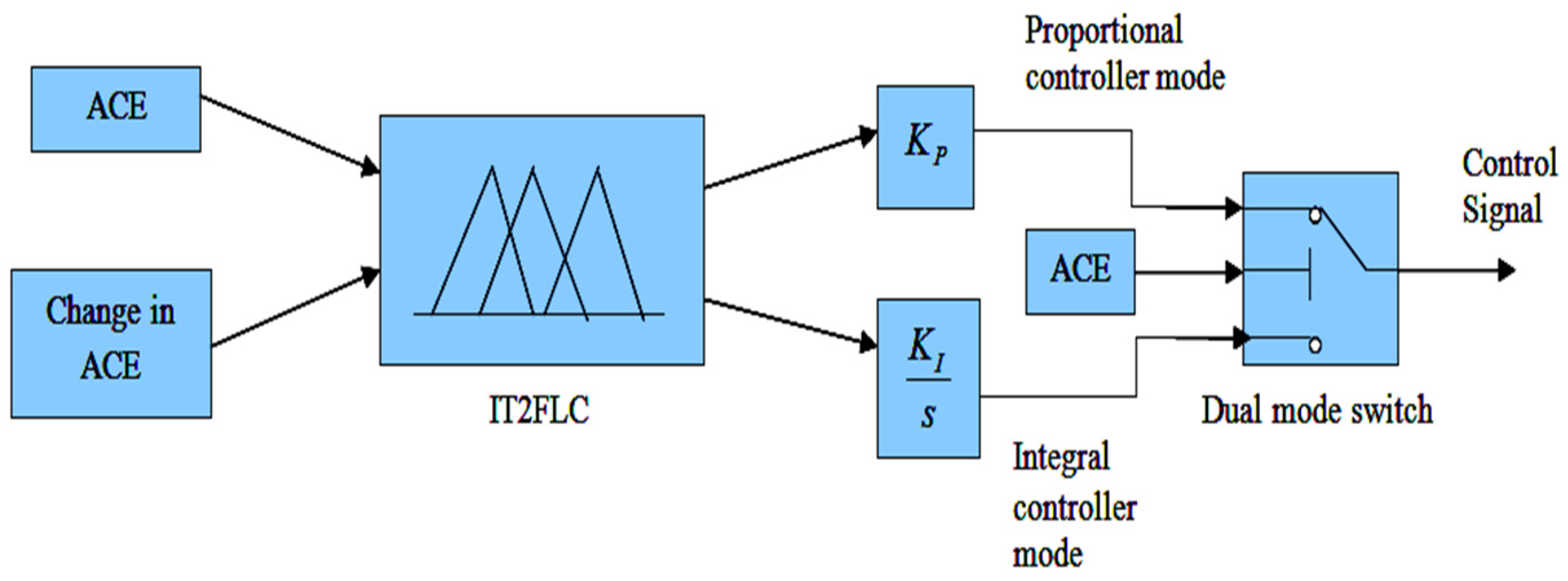
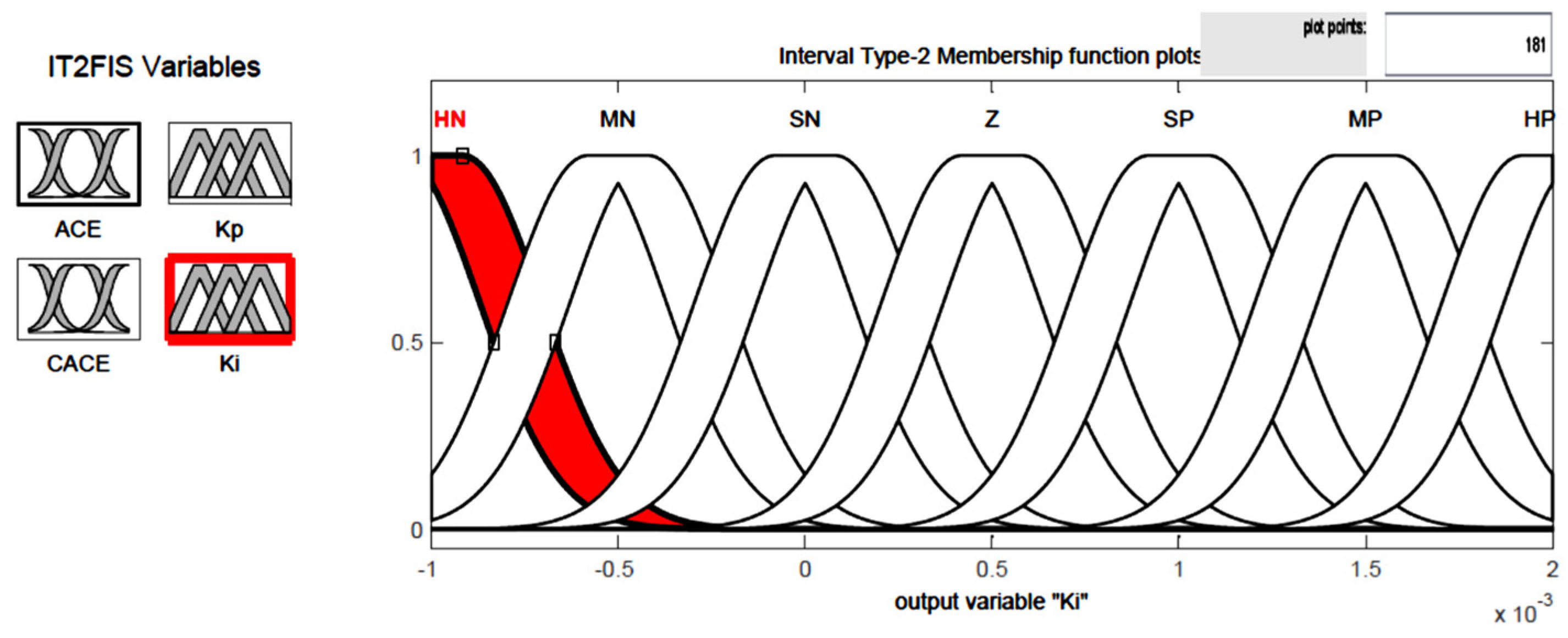
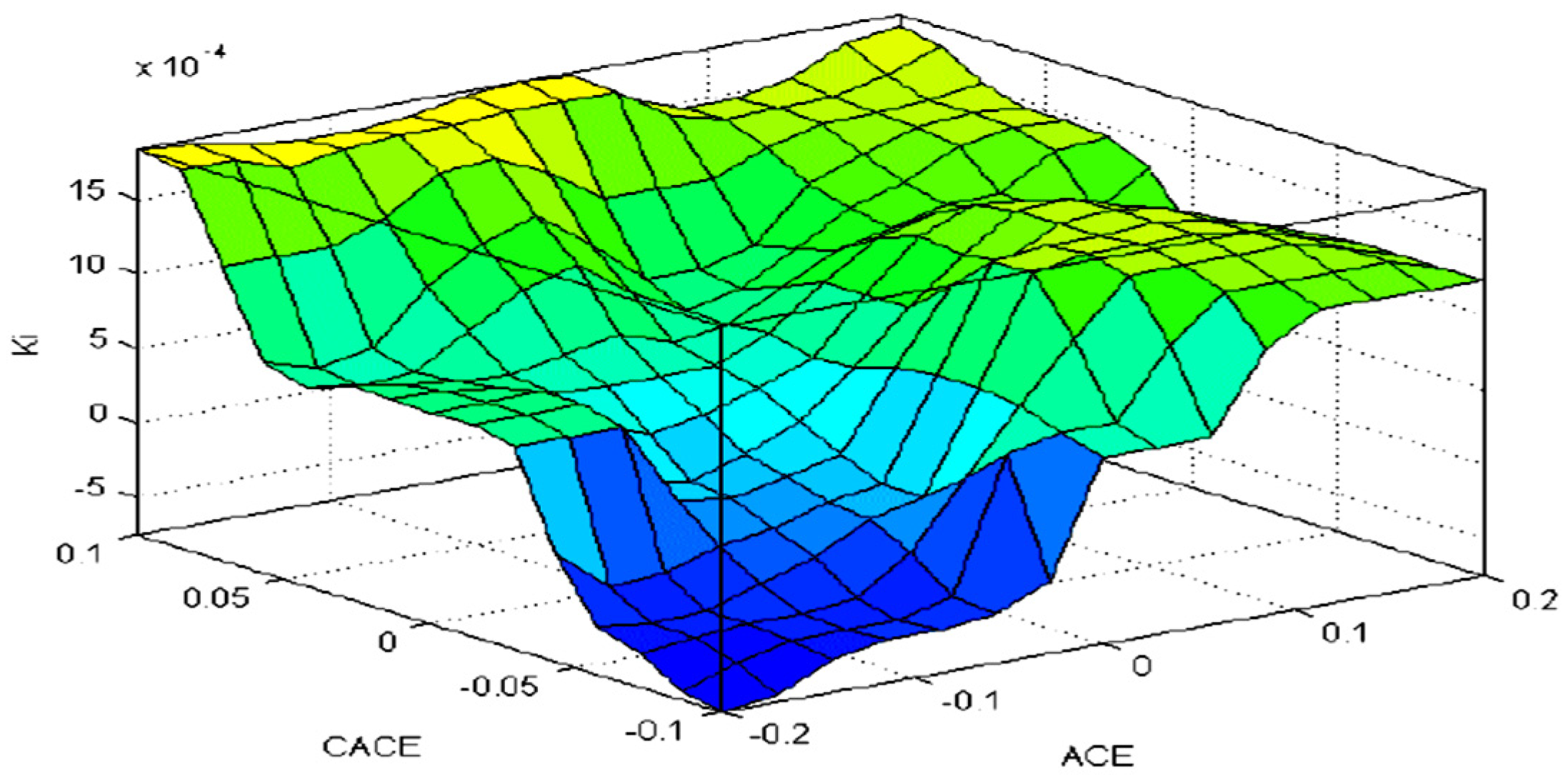
3.2. Type-2 Fuzzy Logic-Based Gain Scheduling of PI Controller for Proposed Test System
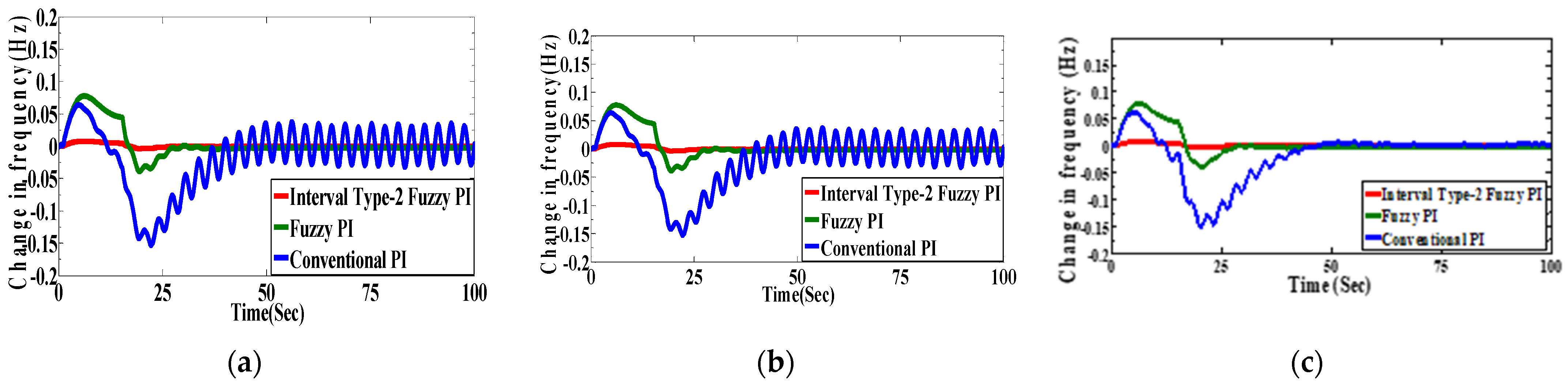
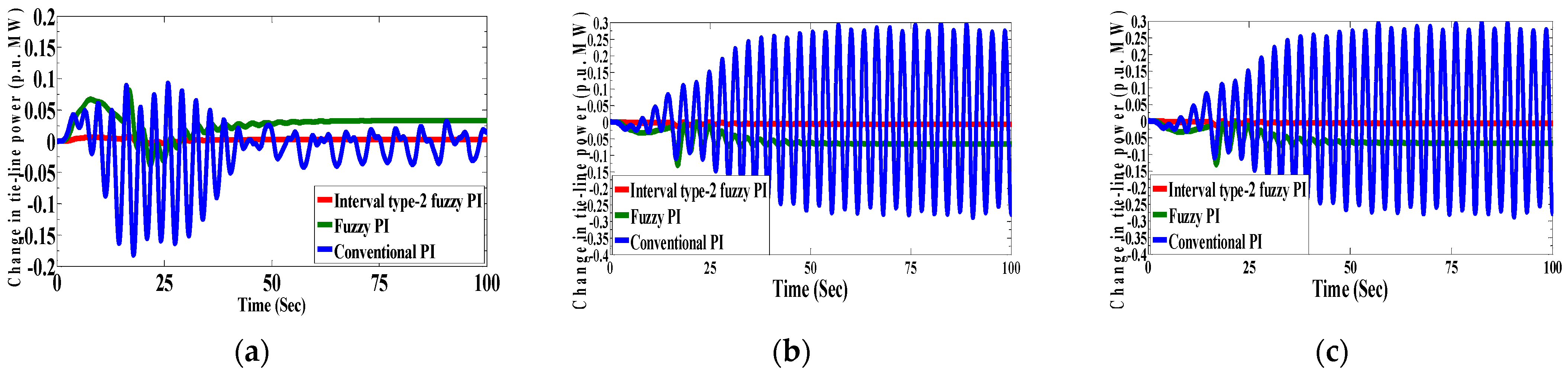
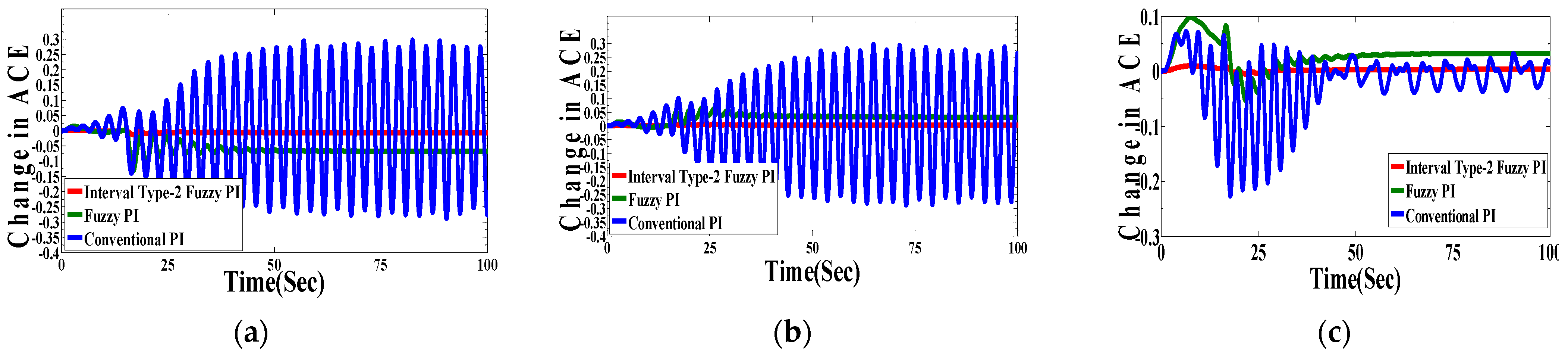
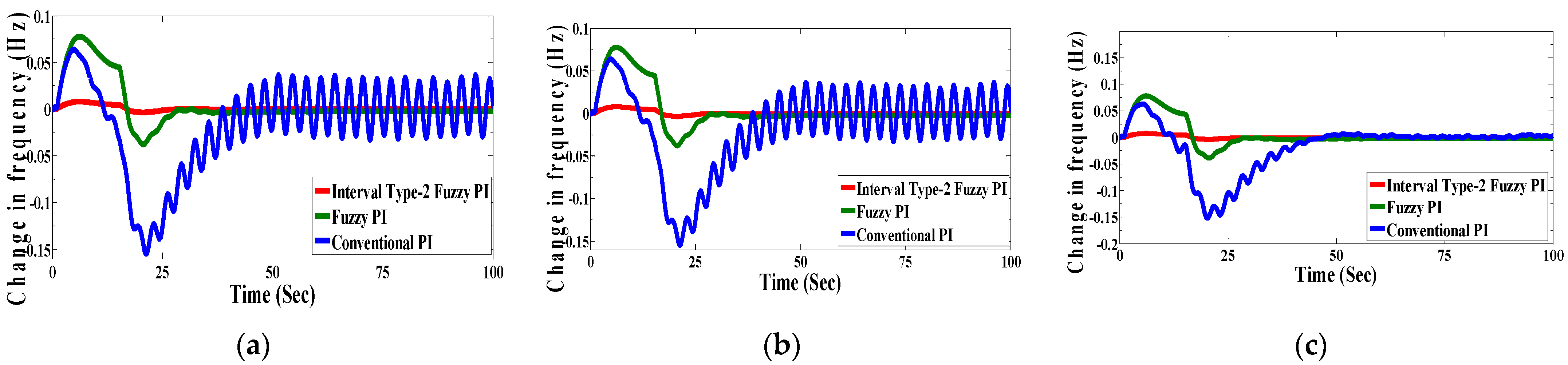
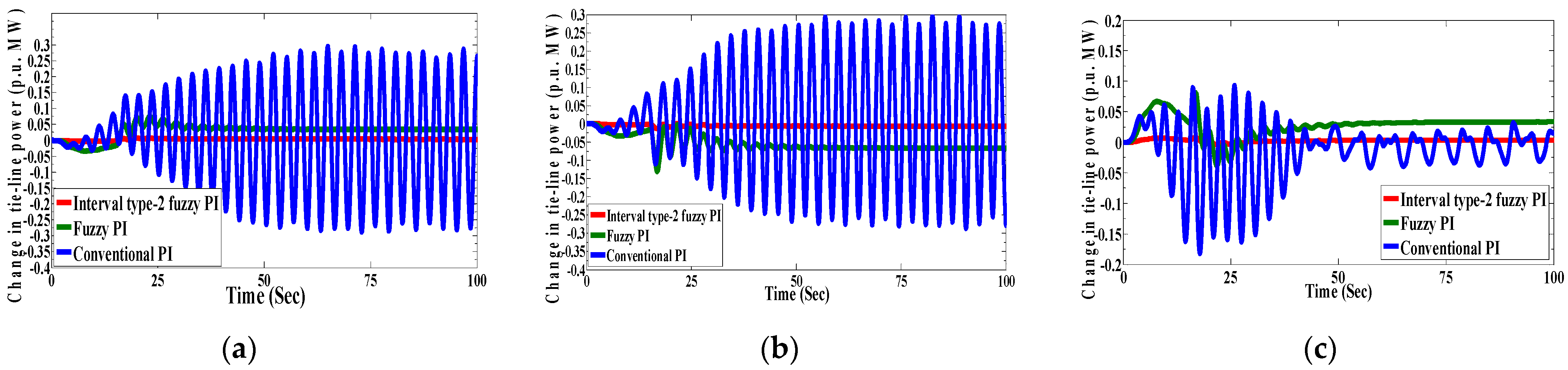
4. Results
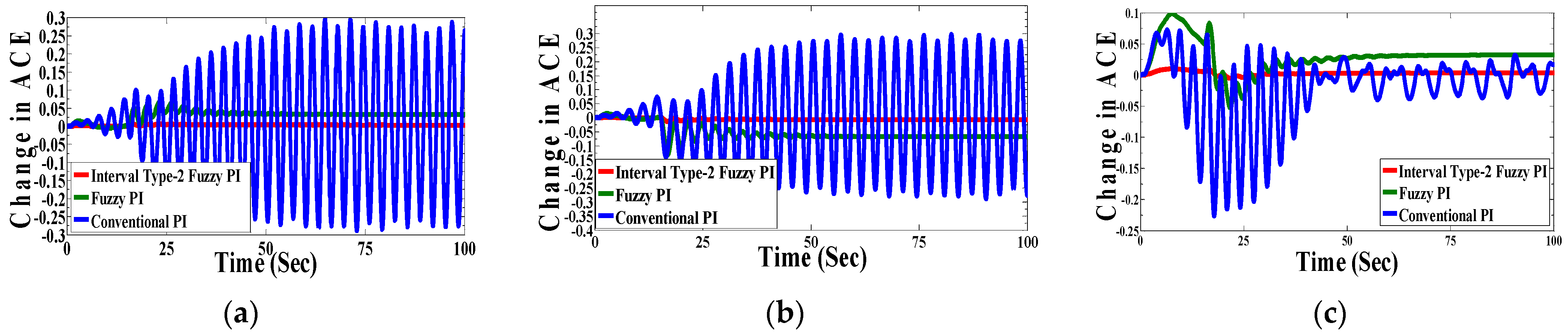
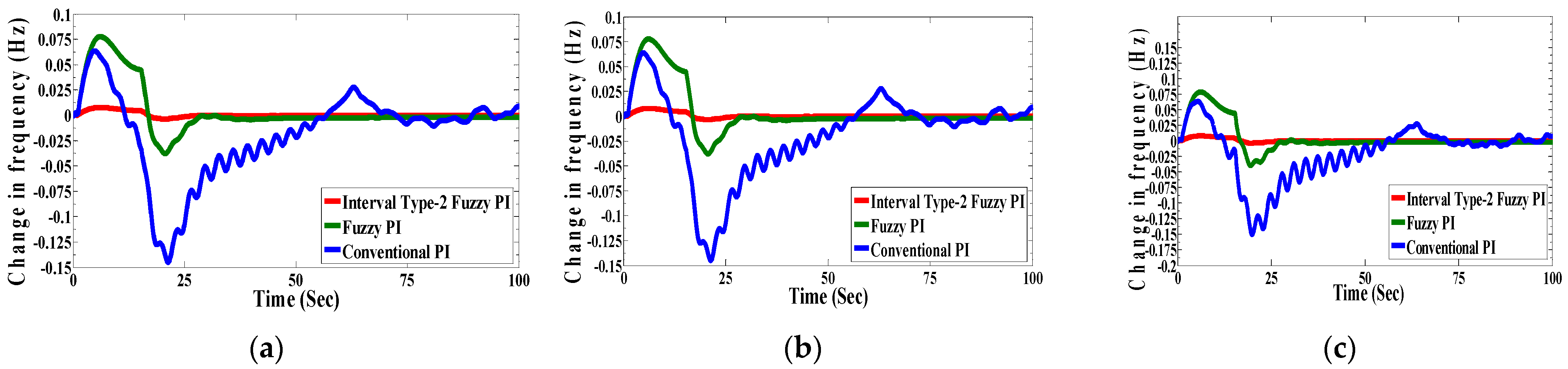
4.1. Condition 1
4.2. Condition 2
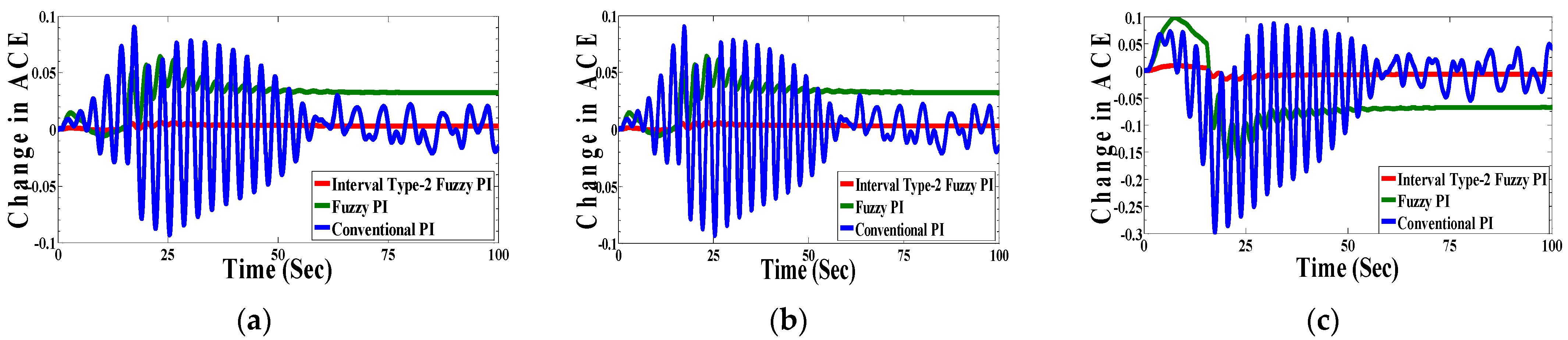
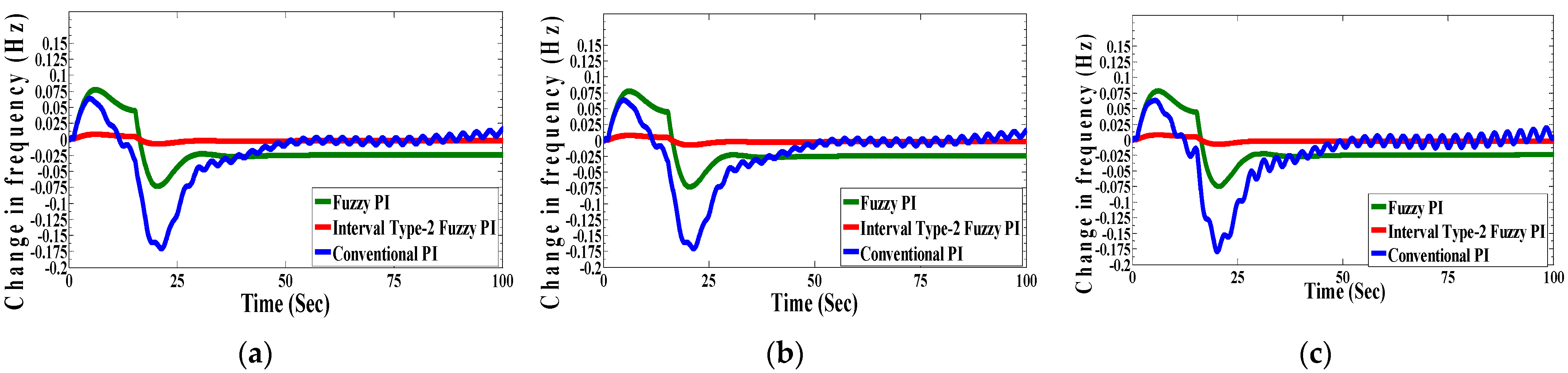
4.3. Condition 3
4.4. Condition 4
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, C.; Wu, Y.; Sun, Y.; Zhang, H.; Liu, Y.; Liu, Y.; Terzija, V. Continuous Under-Frequency Load Shedding Scheme for Power System Adaptive Frequency Control. IEEE Trans. Power Syst. 2020, 35, 950–961. [Google Scholar] [CrossRef]
- Jia, Y.; Dong, Z.Y.; Sun, C.; Meng, K. Cooperation-Based Distributed Economic MPC for Economic Load Dispatch and Load Frequency Control of Interconnected Power Systems. IEEE Trans. Power Syst. 2019, 34, 3964–3966. [Google Scholar] [CrossRef]
- Delavari, A.; Kamwa, I. Sparse and Resilient Hierarchical Direct Load Control for Primary Frequency Response Improvement and Inter-Area Oscillations Damping. IEEE Trans. Power Syst. 2018, 33, 5309–5318. [Google Scholar] [CrossRef]
- Gholamrezaie, V.; Dozein, M.G.; Monsef, H.; Wu, B. An Optimal Frequency Control Method Through a Dynamic Load Frequency Control (LFC) Model Incorporating Wind Farm. IEEE Syst. J. 2018, 12, 392–401. [Google Scholar] [CrossRef]
- Khooban, M.H.; Niknam, T.; Blaabjerg, F.; Dragicevic, T. A new load frequency control strategy for micro-grids with considering electrical vehicles. Electr. Power Syst. Res. 2017, 143, 585–598. [Google Scholar] [CrossRef] [Green Version]
- Syed, M.H.; Guillo-Sansano, E.; Mehrizi-Sani, A.; Burt, G.M. Load Frequency Control in Variable Inertia Systems. IEEE Trans. Power Syst. 2020, 35, 4904–4907. [Google Scholar] [CrossRef]
- Chen, X.; Zhao, C.; Li, N. Distributed Automatic Load Frequency Control With Optimality in Power Systems. IEEE Trans. Control. Netw. Syst. 2021, 8, 307–318. [Google Scholar] [CrossRef]
- Xiahou, K.S.; Liu, Y.; Wu, Q.H. Robust Load Frequency Control of Power Systems Against Random Time-Delay Attacks. IEEE Trans. Smart Grid 2021, 21, 909–911. [Google Scholar] [CrossRef]
- De Carne, G.; Buticchi, G.; Liserre, M.; Vournas, C. Real-Time Primary Frequency Regulation Using Load Power Control by Smart Transformers. IEEE Trans. Smart Grid 2019, 10, 5630–5639. [Google Scholar] [CrossRef] [Green Version]
- Li, H.; Wang, X.; Xiao, J. Adaptive Event-Triggered Load Frequency Control for Interconnected Microgrids by Observer-Based Sliding Mode Control. IEEE Access 2019, 7, 68271–68280. [Google Scholar] [CrossRef]
- Veerasamy, V.; Wahab, N.I.A.; Ramachandran, R.; Othman, M.L.; Hizam, H.; Irudayaraj, A.X.R.; Guerrero, J.M.; Kumar, J.S. A Hankel Matrix Based Reduced Order Model for Stability Analysis of Hybrid Power System Using PSO-GSA Optimized Cascade PI-PD Controller for Automatic Load Frequency Control. IEEE Access 2020, 8, 71422–71446. [Google Scholar] [CrossRef]
- Rawat, S.; Jha, B.; Panda, M.K.; Rath, B.B. Load frequency control of a renewable hybrid power system with simple fuzzy logic controller. In Proceedings of the 2016 International Conference on Computing, Communication and Automation (ICCCA), Greater Noida, India, 29–30 April 2016; pp. 918–923. [Google Scholar] [CrossRef]
- Rawat, S.; Jha, B.; Panda, M.K. Operation and Control of a Hybrid Isolated Power System with Type-2 Fuzzy PID Controller. Iran. J. Sci. Technol. Trans. Electr. Eng. 2018, 42, 403–417. [Google Scholar] [CrossRef]
- Ma, Z.; Xiao, M.; Xiao, Y.; Pang, Z.; Poor, H.V.; Vucetic, B. High-Reliability and Low-Latency Wireless Communication for Internet of Things: Challenges, Fundamentals, and Enabling Technologies. IEEE Internet Things J. 2019, 6, 7946–7970. [Google Scholar] [CrossRef]
- Dai, L.; Fang, Y.; Yang, Z.; Chen, P.; Li, Y. Protograph LDPC-Coded BICM-ID With Irregular CSK Mapping in Visible Light Communication Systems. IEEE Trans. Veh. Technol. 2021, 70, 11033–11038. [Google Scholar] [CrossRef]
- Krause, P.C.; Wasynczuk, O.; Sudhoff, S.D.; Pekarek, S.D. Analysis of Electric Machinery and Drive Systems; John Wiley & Sons: New York, NY, USA, 2013. [Google Scholar]
- Qi, C.; Ming, Z. Photovoltaic Module Simulink Model for a Stand-alone PV System. Phys. Procedia 2012, 24, 94–100. [Google Scholar] [CrossRef] [Green Version]
- Available online: http://www.solarelectricsupply.com/pdf/sharp/SESG-216U1F.pdf (accessed on 22 October 2021).
- Papathanassiou, S.A.; Papadopoulos, M.P. Dynamic characteristics of autonomous wind–diesel systems. Renew. Energy 2001, 23, 293–311. [Google Scholar] [CrossRef]
- Abdelaziz, A.Y.; Ali, E.S. Cuckoo Search algorithm based load frequency controller design for nonlinear intercon-nected power system. Int. J. Electr. Power Energy Syst. 2015, 73, 632–643. [Google Scholar] [CrossRef]
- Karnik, N.N.; Mendel, J.M. Operations on type-2 fuzzy sets. Fuzzy Sets Syst. 2001, 122, 327–348. Available online: http://www.sciencedirect.com/science/article/pii/S0165011400000798 (accessed on 22 October 2021). [CrossRef]
- Castillo, O.; Melin, P.; Kacprzyk, J.; Pedrycz, W. Type-2 Fuzzy Logic: Theory and Applications. In Proceedings of the2007 IEEE International Conference on Granular Computing (GRC 2007), Fremont, CA, USA, 2–4 November 2007; p. 145. [Google Scholar] [CrossRef]
- Sathya, M.R.; Ansari, M.M.T. Load frequency control using Bat inspired algorithm based dual-mode gain scheduling of PI controllers for interconnected power system. Int. J. Electr. Power Energy Syst. 2015, 64, 365–374. Available online: http://www.sciencedirect.com/science/article/pii/S0142061514004773 (accessed on 22 October 2021). [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Rating of each area | 0.1 MW |
| Base power | 0.1 MW |
| KP1, KP2, KP3 | 120 Hz/p.u. MW |
| TP1, TP2, TP3 | 20 sec |
| T12, T13, T23 | 0.545 p.u. |
| a12, a31, a23 | −1 |
| R1, R2, R3 | 2.4 Hz/p.u. MW |
| TW | 1 sec |
| Kd | 4.0 |
| Ki | 5.0 |
| KP | 1.0 |
| F | 50 Hz |
| Base Power | 0.1 MW |
| Case | Parameters | Controller | Settling Time (s) | Peak Time (s) | Maximum Overshoot |
|---|---|---|---|---|---|
| 1 | ∆f1 | PI | 68 | 6 | 0.056 |
| Fuzzy PI | 45 | 7.8 | 0.051 | ||
| IT-2 Fuzzy PI | 39 | 7 | 0.01 | ||
| ∆f2 | PI | 62 | 6 | 0.054 | |
| Fuzzy PI | 40 | 8 | 0.049 | ||
| IT-2 Fuzzy PI | 38 | 7.8 | 0.009 | ||
| ∆f3 | PI | 60 | 7 | 0.054 | |
| Fuzzy PI | 38 | 7.9 | 0.05 | ||
| IT-2 Fuzzy PI | 30 | 8 | 0.009 | ||
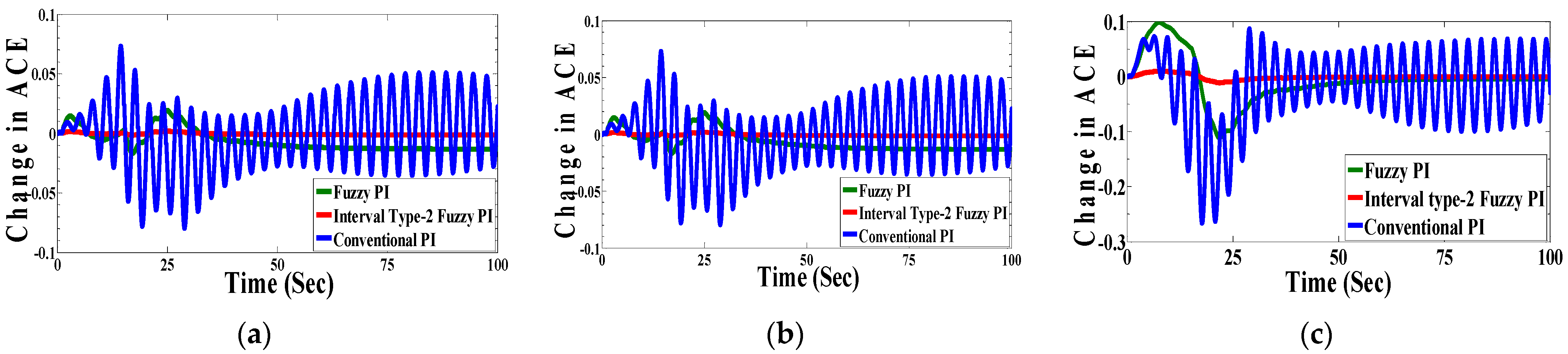
| ∆ACE1 | PI | >100 | 3 | 0.025 | |
| Fuzzy PI | 50 | 3.5 | 0.02 | ||
| IT-2 Fuzzy PI | 45 | 2 | 0.01 | ||
| ∆ACE2 | PI | >100 | 3 | 0.026 | |
| Fuzzy PI | 55 | 3.5 | 0.021 | ||
| IT-2 Fuzzy PI | 42 | 2.5 | 0.009 | ||
| ∆ACE3 | PI | 59 | 4.7 | 0.1 | |
| Fuzzy PI | 70 | 9.8 | 0.065 | ||
| IT-2 Fuzzy PI | 60 | 8 | 0.008 | ||
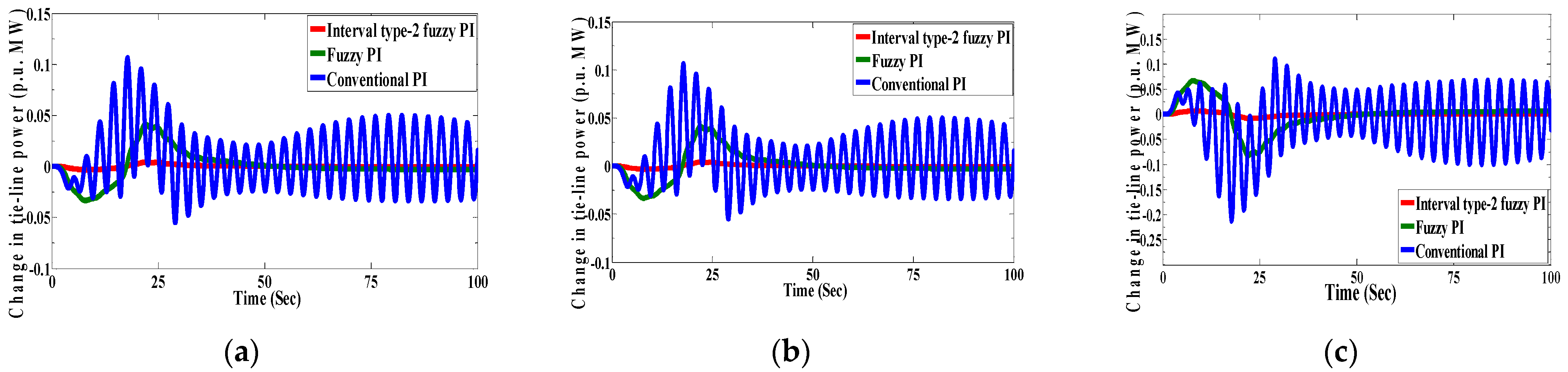
| ∆Ptie1 | PI | >100 | 10.5 | 0.01 | |
| Fuzzy PI | 60 | 20 | 0 | ||
| IT-2 Fuzzy PI | 52 | 15 | 0.008 | ||
| ∆Ptie2 | PI | >100 | 10.4 | 0.012 | |
| Fuzzy PI | 60.5 | 19 | 0 | ||
| IT-2 Fuzzy PI | 57 | 15 | 0.009 | ||
| ∆Ptie3 | PI | 60 | 4.8 | 0.04 | |
| Fuzzy PI | 55 | 10 | 0.065 | ||
| IT-2 Fuzzy PI | 52 | 7 | 0.01 | ||
| 2 | ∆f1 | PI | 65 | 6 | 0.06 |
| Fuzzy PI | 48 | 7.8 | 0.075 | ||
| IT-2 Fuzzy PI | 42 | 6 | 0.008 | ||
| ∆f2 | PI | 68 | 6 | 0.064 | |
| Fuzzy PI | 47.5 | 7.8 | 0.075 | ||
| IT-2 Fuzzy PI | 39 | 6 | 0.01 | ||
| ∆f3 | PI | 63 | 7 | 0.055 | |
| Fuzzy PI | 48 | 8 | 0.074 | ||
| IT-2 Fuzzy PI | 35 | 5.6 | 0.012 | ||
| ∆ACE1 | PI | >100 | 3 | 0.01 | |
| Fuzzy PI | 55 | 3.6 | 0.012 | ||
| IT-2 Fuzzy PI | 43 | 2 | 0.009 | ||
| ∆ACE2 | PI | >100 | 3 | 0.02 | |
| Fuzzy PI | 49 | 3.5 | 0.022 | ||
| IT-2 Fuzzy PI | 0.01 | ||||
| ∆ACE3 | PI | 59 | 4.7 | 0.058 | |
| Fuzzy PI | 68 | 9.8 | 0.1 | ||
| IT-2 Fuzzy PI | 48 | 6 | 0.013 | ||
| ∆Ptie1 | PI | >100 | 10.5 | 0.01 | |
| Fuzzy PI | 55 | 22.2 | 0.052 | ||
| IT-2 Fuzzy PI | 46 | 18 | 0.008 | ||
| ∆Ptie2 | PI | >100 | 10.4 | 0.01 | |
| Fuzzy PI | 66 | 20 | 0 | ||
| IT-2 Fuzzy PI | 50 | 15 | 0.007 | ||
| ∆Ptie3 | PI | 60 | 4.8 | 0.048 | |
| Fuzzy PI | 70 | 10 | 0.058 | ||
| IT-2 Fuzzy PI | 58 | 7.1 | 0.007 | ||
| 3 | ∆f1 | PI | 83 | 6 | 0.06 |
| Fuzzy PI | 48 | 7.8 | 0.075 | ||
| IT-2 Fuzzy PI | 34 | 5.2 | 0.012 | ||
| ∆f2 | PI | 83 | 6 | 0.061 | |
| Fuzzy PI | 46 | 7.8 | 0.076 | ||
| IT-2 Fuzzy PI | 35 | 6 | 0.01 | ||
| ∆f3 | PI | 96 | 7 | 0.06 | |
| Fuzzy PI | 46 | 7.9 | 0.08 | ||
| IT-2 Fuzzy PI | 38 | 6.4 | 0.009 | ||
| ∆ACE1 | PI | 73 | 2.7 | 0.0149 | |
| Fuzzy PI | 51 | 3.5 | 0.018 | ||
| IT-2 Fuzzy PI | 43 | 2.6 | 0.005 | ||
| ∆ACE2 | PI | 73 | 2.7 | 0.015 | |
| Fuzzy PI | 50 | 3.5 | 0.016 | ||
| IT-2 Fuzzy PI | 42 | 2.3 | 0.007 | ||
| ∆ACE3 | PI | 75 | 4.8 | 0.054 | |
| Fuzzy PI | 58 | 9.8 | 0.1 | ||
| IT-2 Fuzzy PI | 43 | 7 | 0.013 | ||
| ∆Ptie1 | PI | 73 | 6.5 | 0.015 | |
| Fuzzy PI | 47.3 | 22.2 | 0.05 | ||
| IT-2 Fuzzy PI | 34 | 14 | 0.011 | ||
| ∆Ptie2 | PI | 73 | 6.5 | 0.015 | |
| Fuzzy PI | 51.5 | 22.2 | 0.058 | ||
| IT-2 Fuzzy PI | 42 | 16 | 0.013 | ||
| ∆Ptie3 | PI | 75.4 | 4.8 | 0.049 | |
| Fuzzy PI | 62 | 10 | 0.054 | ||
| IT-2 Fuzzy PI | 53 | 7.4 | 0.008 | ||
| 4 | ∆f1 | PI | 72 | 6 | 0.061 |
| Fuzzy PI | 38 | 8 | 0.075 | ||
| IT-2 Fuzzy PI | 35 | 7.1 | 0.014 | ||
| ∆f2 | PI | 72 | 6 | 0.062 | |
| Fuzzy PI | 38 | 8 | 0.076 | ||
| IT-2 Fuzzy PI | 0.013 | ||||
| ∆f3 | PI | 69 | 7 | 0.065 | |
| Fuzzy PI | 40 | 8 | 0.075 | ||
| IT-2 Fuzzy PI | 37 | 6.2 | 0.016 | ||
| ∆ACE1 | PI | >100 | 2.6 | 0.014 | |
| Fuzzy PI | 82 | 3.5 | 0.018 | ||
| IT-2 Fuzzy PI | 60 | 2 | 0.007 | ||
| ∆ACE2 | PI | >100 | 2.6 | 0.013 | |
| Fuzzy PI | 82 | 3.5 | 0.016 | ||
| IT-2 Fuzzy PI | 60 | 2 | 0.007 | ||
| ∆ACE3 | PI | >100 | 4.8 | 0.058 | |
| Fuzzy PI | 70 | 10 | 0.1 | ||
| IT-2 Fuzzy PI | 64 | 9 | 0.011 | ||
| ∆Ptie1 | PI | >100 | 6.5 | 0.015 | |
| Fuzzy PI | 72 | 28.8 | 0.04 | ||
| IT-2 Fuzzy PI | 65 | 23 | 0.01 | ||
| ∆Ptie2 | PI | >100 | 6.5 | 0.014 | |
| Fuzzy PI | 72 | 28.8 | 0.038 | ||
| IT-2 Fuzzy PI | 65 | 23 | 0.009 | ||
| ∆Ptie3 | PI | >100 | 4.7 | 0.048 | |
| Fuzzy PI | 75 | 10 | 0.058 | ||
| IT-2 Fuzzy PI | 67 | 6 | 0.008 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rawat, S.; Jha, B.; Panda, M.K.; Kanti, J. Interval Type-2 Fuzzy Logic Control-Based Frequency Control of Hybrid Power System Using DMGS of PI Controller. Appl. Sci. 2021, 11, 10217. https://doi.org/10.3390/app112110217
Rawat S, Jha B, Panda MK, Kanti J. Interval Type-2 Fuzzy Logic Control-Based Frequency Control of Hybrid Power System Using DMGS of PI Controller. Applied Sciences. 2021; 11(21):10217. https://doi.org/10.3390/app112110217
Chicago/Turabian StyleRawat, Swati, Bhola Jha, Manoj Kumar Panda, and Jyotshana Kanti. 2021. "Interval Type-2 Fuzzy Logic Control-Based Frequency Control of Hybrid Power System Using DMGS of PI Controller" Applied Sciences 11, no. 21: 10217. https://doi.org/10.3390/app112110217
APA StyleRawat, S., Jha, B., Panda, M. K., & Kanti, J. (2021). Interval Type-2 Fuzzy Logic Control-Based Frequency Control of Hybrid Power System Using DMGS of PI Controller. Applied Sciences, 11(21), 10217. https://doi.org/10.3390/app112110217