
Bi-Objective Optimization for Industrial Robotics Workflow Resource Allocation in an Edge–Cloud Environment


Abstract
1. Introduction
- The edge–cloud architecture IRMS is architected to allow industrial robot-monitoring tasks to perform as workflows and can be allocated to computing resources in the edge–cloud environment.
- The Industrial Robot-Monitoring Workflow Assignment Problem (IRMWAP) is defined in terms of the characteristics of industrial robot-monitoring workflow task execution as an NP-hard bi-objective (latency and cost) optimization problem.
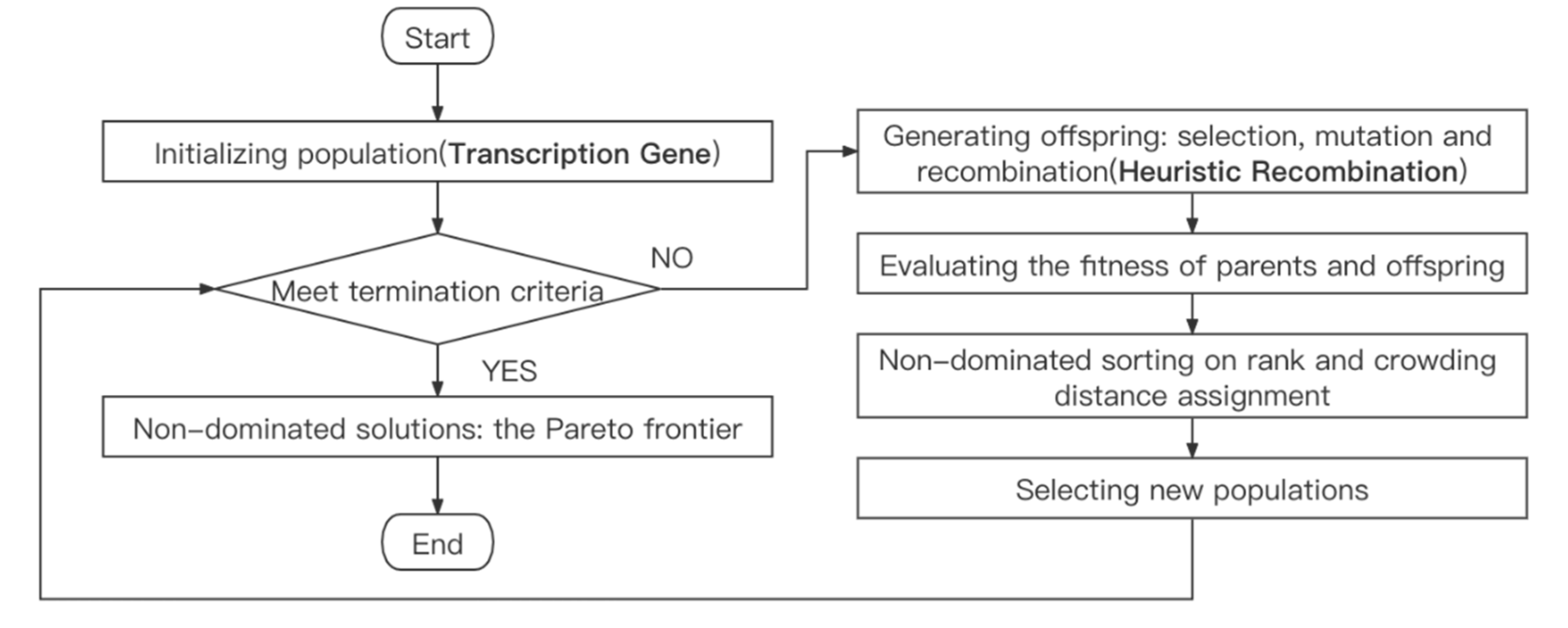
- The Improved NSGA2 based on Transcription Gene and Heuristic Recombination (INSGA2-TGHR) algorithm is proposed by means of improved genetic factors and recombination operators to provide a set of Pareto frontiers for the monitor with computing resource allocation schemes.
2. Related Work
3. Edge–Cloud Collaborative Architecture
3.1. System Model and Assumptions
3.2. Application Motivating Example: Comprehensive Assessment Workflow for Industrial Robot Monitoring
4. Bi-Objective Optimization Allocation Problem Model and Algorithm
4.1. Industrial Robot-Monitoring Workflow Assignment Problem (IRMWAP) Formulation
4.2. Improved NSGA2 Based on Transcription Gene and Heuristic Recombination (INSGA2-TGHR)
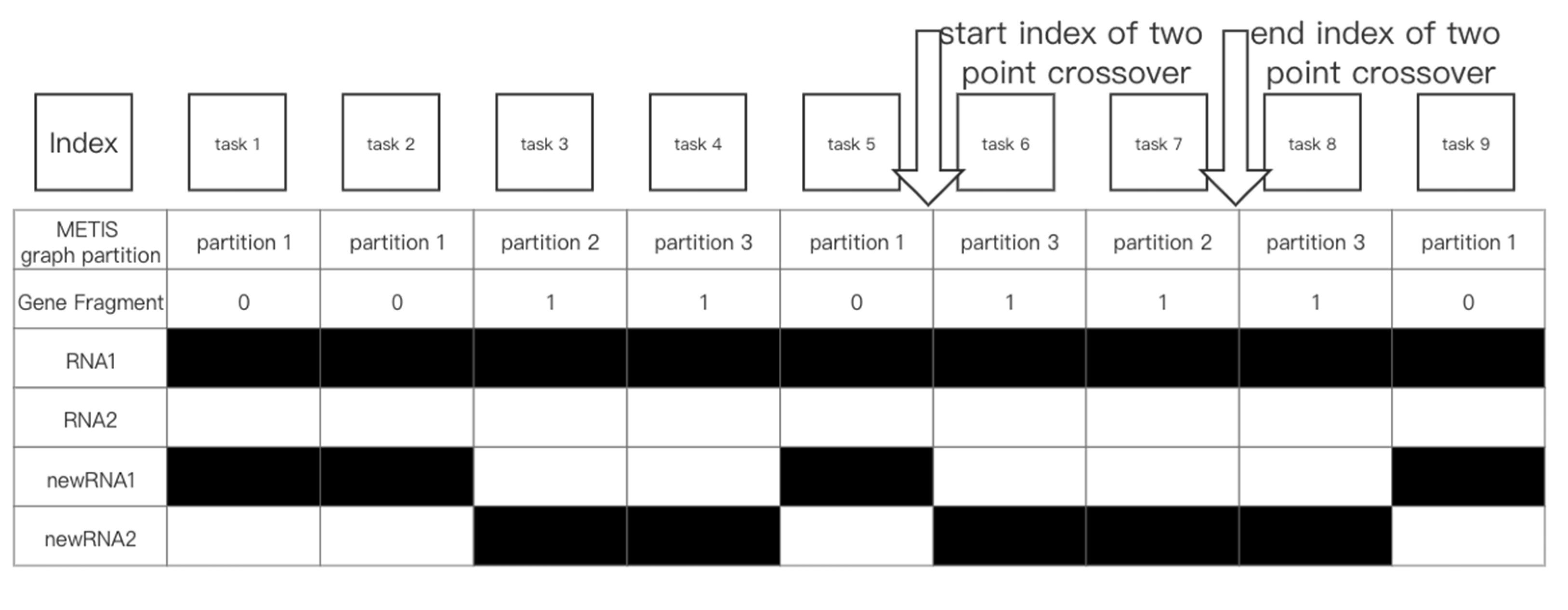
4.2.1. Genetic Factors: Transcription Gene
| Algorithm 1: Transcription |
 |
4.2.2. Mutation Operator
4.2.3. Crossover Operator: Heuristic Recombination
| Algorithm 2: Heuristic Double Point Recombination |
 |
4.2.4. Fitness Calculation
5. Experiments
5.1. Simulation Environment
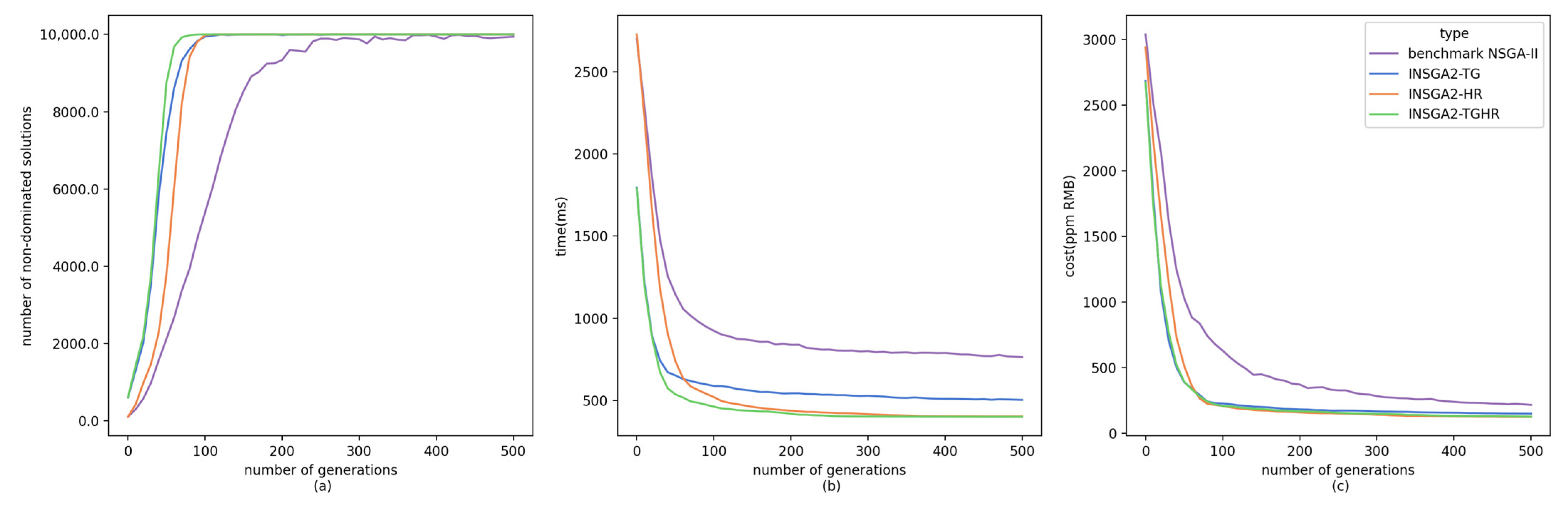
Impact of Evolution Generation
5.2. Impact of the Number of Resources
5.2.1. Impact of Local Resources
5.2.2. Impact of Edge Resources
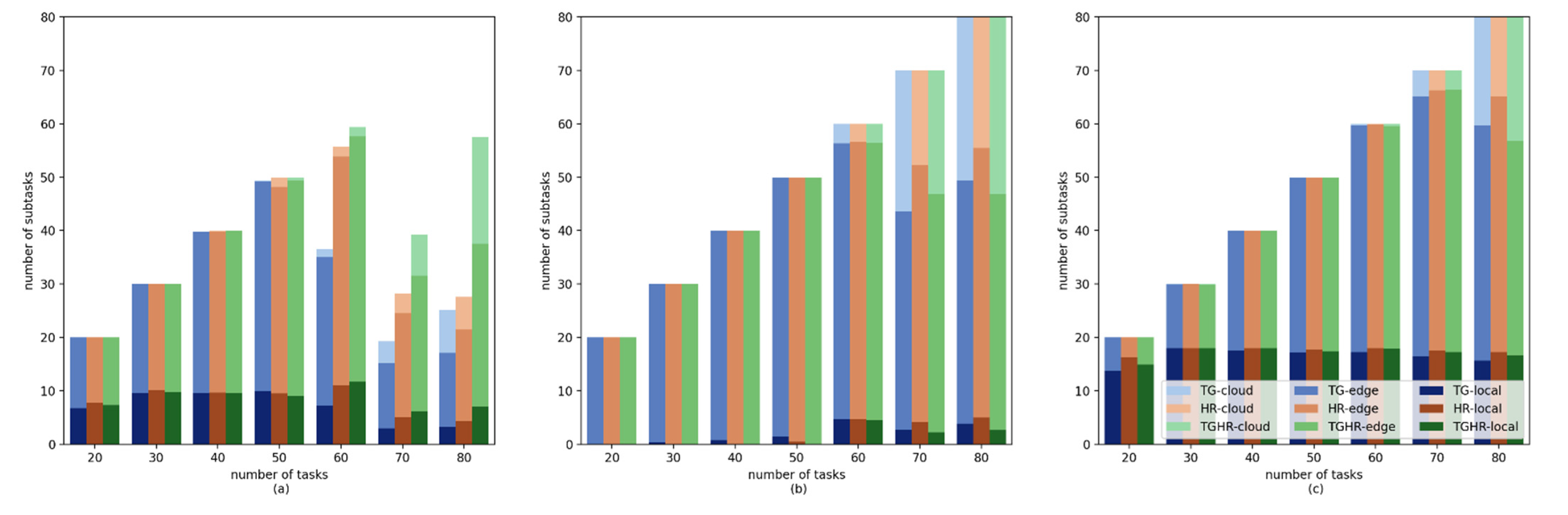
5.3. Impact of the Number of Subtasks
5.4. Impact of the Number of Task Instructions
5.5. Results and Discussions
6. Conclusions and Future Directions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Chen, Y.; Dong, F. Robot Machining: Recent Development and Future Research Issues. Int. J. Adv. Manuf. Technol. 2013, 66, 1489–1497. [Google Scholar] [CrossRef]
- Hou, Z.; Chen, J. Research Review of Remote Monitoring and Fault Diagnosis of Industrial Robots. Mach. Tool Hydraul. 2018, 46, 172–176, 168. [Google Scholar]
- Yang, H.; Sun, Z.; Jiang, G.; Zhao, F.; Lu, X.; Mei, X. Cloud-Manufacturing-Based Condition Monitoring Platform With 5G and Standard Information Model. IEEE Internet Things J. 2021, 8, 6940–6948. [Google Scholar] [CrossRef]
- Atmoko, R.A.; Yang, D. Online Monitoring & Controlling Industrial Arm Robot Using MQTT Protocol. In Proceedings of the 2018 IEEE International Conference on Robotics, Biomimetics, and Intelligent Computational Systems (Robionetics), Bandung, Indonesia, 8–10 August 2018; pp. 12–16. [Google Scholar] [CrossRef]
- Chen, W.; Yaguchi, Y.; Naruse, K.; Watanobe, Y.; Nakamura, K.; Ogawa, J. A Study of Robotic Cooperation in Cloud Robotics: Architecture and Challenges. IEEE Access 2018, 6, 36662–36682. [Google Scholar] [CrossRef]
- Hu, G.; Tay, W.; Wen, Y. Cloud Robotics: Architecture, Challenges and Applications. IEEE Network 2012, 26, 21–28. [Google Scholar] [CrossRef]
- Kehoe, B.; Patil, S.; Abbeel, P.; Goldberg, K. A Survey of Research on Cloud Robotics and Automation. IEEE Trans. Automat. Sci. Eng. 2015, 12, 398–409. [Google Scholar] [CrossRef]
- Wan, J.; Tang, S.; Yan, H.; Li, D.; Wang, S.; Vasilakos, A.V. Cloud Robotics: Current Status and Open Issues. IEEE Access 2016, 4, 2797–2807. [Google Scholar] [CrossRef]
- O’Donovan, P.; Leahy, K.; Bruton, K.; O’Sullivan, D.T.J. An Industrial Big Data Pipeline for Data-Driven Analytics Maintenance Applications in Large-Scale Smart Manufacturing Facilities. J. Big Data 2015, 2, 25. [Google Scholar] [CrossRef]
- Cloud Edge Computing: Beyond the Data Center. OpenStack Is Open Source Software for Creating Private and Public Clouds. Available online: https://www.openstack.org/use-cases/edge-computing/cloud-edge-computing-beyond-the-data-center/?lang=en_US (accessed on 24 September 2021).
- Pan, Y.; Er, M.J.; Li, X.; Yu, H.; Gouriveau, R. Machine Health Condition Prediction via Online Dynamic Fuzzy Neural Networks. Eng. Appl. Artif. Intell. 2014, 35, 105–113. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A Fast and Elitist Multiobjective Genetic Algorithm: NSGA-II. IEEE Trans. Evol. Computat. 2002, 6, 182–197. [Google Scholar] [CrossRef]
- Xuhong, M.; Zhizeng, L. The Design and Implement of Embedded Remote Control System in Industrial Robot. In Proceedings of the 2012 International Conference on Computer Science and Electronics Engineering, Hangzhou, China, 23–25 March 2012; pp. 332–335. [Google Scholar] [CrossRef]
- Yin, H.L.; Wang, Y.M.; Xiao, N.F.; Jiang, Y.R. Real-Time Remote Manipulation and Monitoring Architecture of an Industry Robot. In Proceedings of the 2008 IEEE International Joint Conference on Neural Networks (IEEE World Congress on Computational Intelligence), Hong Kong, China, 1–8 June 2008; pp. 1228–1234. [Google Scholar] [CrossRef]
- Chen, W.; Yaguchi, Y.; Naruse, K.; Watanobe, Y.; Nakamura, K. QoS-Aware Robotic Streaming Workflow Allocation in Cloud Robotics Systems. IEEE Trans. Serv. Comput. 2021, 14, 544–558. [Google Scholar] [CrossRef]
- Afrin, M.; Jin, J.; Rahman, A.; Tian, Y.-C.; Kulkarni, A. Multi-Objective Resource Allocation for Edge Cloud Based Robotic Workflow in Smart Factory. Future Gener. Comput. Syst. 2019, 97, 119–130. [Google Scholar] [CrossRef]
- Ghasemi-Falavarjani, S.; Nematbakhsh, M.; Shahgholi Ghahfarokhi, B. Context-Aware Multi-Objective Resource Allocation in Mobile Cloud. Comput. Electr. Eng. 2015, 44, 218–240. [Google Scholar] [CrossRef]
- Al-Tarawneh, M.A.B. Bi-Objective Optimization of Application Placement in Fog Computing Environments. J. Ambient. Intell. Hum. Comput. 2021. [Google Scholar] [CrossRef]
- Rahman, A.; Jin, J.; Cricenti, A.; Rahman, A.; Panda, M. Motion and Connectivity Aware Offloading in Cloud Robotics via Genetic Algorithm. In Proceedings of the GLOBECOM 2017-2017 IEEE Global Communications Conference, Singapore, 4–8 December 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Xie, Y.; Guo, Y.; Mi, Z.; Yang, Y.; Obaidat, M.S. Loosely Coupled Cloud Robotic Framework for QoS-Driven Resource Allocation-Based Web Service Composition. IEEE Syst. J. 2020, 14, 1245–1256. [Google Scholar] [CrossRef]
- Li, S.; Zheng, Z.; Chen, W.; Zheng, Z.; Wang, J. Latency-Aware Task Assignment and Scheduling in Collaborative Cloud Robotic Systems. In Proceedings of the 2018 IEEE 11th International Conference on Cloud Computing (CLOUD), San Francisco, CA, USA, 2–7 July 2018; pp. 65–72. [Google Scholar] [CrossRef]
- Hirsch, M.; Mateos, C.; Zunino, A.; Majchrzak, T.A.; Grønli, T.-M.; Kaindl, H. A Task Execution Scheme for Dew Computing with State-of-the-Art Smartphones. Electronics 2021, 10, 2006. [Google Scholar] [CrossRef]
- Sanabria, P.; Tapia, T.F.; Neyem, A.; Benedetto, J.I.; Hirsch, M.; Mateos, C.; Zunino, A. New Heuristics for Scheduling and Distributing Jobs under Hybrid Dew Computing Environments. Wirel. Commun. Mobile Comput. 2021, 2021, 8899660. [Google Scholar] [CrossRef]
- Pallasch, C.; Wein, S.; Hoffmann, N.; Obdenbusch, M.; Buchner, T.; Waltl, J.; Brecher, C. Edge Powered Industrial Control: Concept for Combining Cloud and Automation Technologies. In Proceedings of the 2018 IEEE International Conference on Edge Computing (EDGE), San Francisco, CA, USA, 2–7 July 2018; pp. 130–134. [Google Scholar] [CrossRef]
- Hahn, P.M.; Kim, B.-J.; Guignard, M.; Smith, J.M.; Zhu, Y.-R. An Algorithm for the Generalized Quadratic Assignment Problem. Comput. Optim. Appl. 2008, 40, 351–372. [Google Scholar] [CrossRef][Green Version]
- Gurobi. The Fastest Solver—Gurobi. Available online: https://www.gurobi.com/ (accessed on 24 September 2021).
- Zitzler, E.; Laumanns, M.; Thiele, L. SPEA2: Improving the Strength Pareto Evolutionary Algorithm. TIK-Rep. 2001. [Google Scholar] [CrossRef]
- Knowles, J.; Corne, D. The Pareto Archived Evolution Strategy: A New Baseline Algorithm for Pareto Multiobjective Optimisation. In Proceedings of the Proceedings of the 1999 Congress on Evolutionary Computation-CEC99 (Cat. No. 99TH8406), Washington, DC, USA, 6–9 July 1999; pp. 98–105. [Google Scholar] [CrossRef]
- Coello Coello, C.A.; Lechuga, M.S. MOPSO: A Proposal for Multiple Objective Particle Swarm Optimization. In Proceedings of the Proceedings of the 2002 Congress on Evolutionary Computation, CEC’02 (Cat. No.02TH8600), Honolulu, HI, USA, 12–17 May 2002; Volume 2, pp. 1051–1056. [Google Scholar] [CrossRef]
- Karypis, G.; Kumar, V. A Fast and High Quality Multilevel Scheme for Partitioning Irregular Graphs. SIAM J. Sci. Comput. 1998, 20, 359–392. [Google Scholar] [CrossRef]
- He, S.; Lyu, X.; Ni, W.; Tian, H.; Liu, R.P.; Hossain, E. Virtual Service Placement for Edge Computing Under Finite Memory and Bandwidth. IEEE Trans. Commun. 2020, 68, 7702–7718. [Google Scholar] [CrossRef]
- Price Calculator. HUAWEI CLOUD. Available online: https://www.huaweicloud.com/pricing.html (accessed on 24 September 2021).
- Geatpy: The Genetic and Evolutionary Algorithm Toolbox with High Performance in Python. Available online: http://www.geatpy.com/ (accessed on 24 September 2021).

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Work | Solution Approach | Target Application | Workflow Scale Reduction | Communication Restrictions | Multi-Objective Optimization | Resource Type | ||
|---|---|---|---|---|---|---|---|---|
| Robot (Local) | Edge (Fog) | Cloud | ||||||
| [15] | Heuristic MILP | Cloud robotic | YES | YES | NO | YES | NO | YES |
| [16] | Augmented NSGA-II | Smart factory | No | NO | YES | YES | NO | YES |
| [17] | Benchmark NSGA-II | Mobile Computing Resource Allocation | No | No | YES | YES | NO | YES |
| [18] | Benchmark NSGA-II | Application placement | NO | NO | YES | YES | YES | YES |
| [19] | GA | Smart city | NO | NO | NO | YES | NO | YES |
| [20] | genetic-based ICA | Cloud robotic | NO | NO | NO | YES | YES | YES |
| [21] | Heuristic ILP | Cloud robotic | YES | YES | NO | YES | NO | YES |
| [22] | Heuristic devices sorting | Task scheduling in Dew | NO | YES | NO | YES | YES | YES |
| [23] | Heuristic scheduling algorithm | Task scheduling in Dew | NO | YES | NO | YES | YES | YES |
| This | INSGA2-TGHR | Industrial Robot Monitoring | YES | YES | YES | YES | YES | YES |
| Symbol | Definition and Description |
|---|---|
| Task i | |
| The before-and-after relationship between tasks i to j | |
| Compute node x | |
| Compute the network link between node x to y | |
| running on | |
| The execution instructions of | |
| The execution memory space of | |
| The workflow pattern of , including Sequence, Parallel Split, Synchronization, Exclusive Choice, Simple Merge | |
| The transfer data of | |
| The computing speed of , cloud center > edge server > monitor | |
| The latency between monitor and | |
| The computing cost of , edge server > cloud center > monitor = 0 | |
| The computing capacity of , cloud center > edge server > monitor | |
| The upload bandwidth of , cloud center > edge server > monitor | |
| The download bandwidth of , cloud center > edge server > monitor | |
| The communication latency of , monitor to cloud center > monitor to edge server | |
| The communication cost of , monitor to cloud center > monitor to edge server | |
| The communication capacity of , cloud center to edge server > monitor to cloud center > monitor to edge server |
| Params Type | Params Value | |
|---|---|---|
| workflow | Number of subtasks | 30–80 |
| instruction | 10–800 MI | |
| memory | 100–500 MB | |
| data dependency | 10–100 kB | |
| Local Monitor | CPU | 0.8 Ghz*1 |
| memory | 1 GB | |
| bandwidth | 400 Mbps | |
| Edge Server 1 | CPU | 3.0 Ghz*4 |
| memory | 8 GB | |
| bandwidth | 2 Gbps | |
| cost | 2 RMB/h | |
| Cloud Server 1 | CPU | 3.0 Ghz*8 |
| memory | 16 GB | |
| bandwidth | 4 Gbps | |
| cost | 2 RMB/h | |
| Local to Edge | cost | 0.25 RMB/GB |
| Latency | 10 ms | |
| Edge to Cloud | cost | 0.75 RMB/GB |
| Latency | 30 ms | |
| Local to Cloud | cost | 1 RMB/GB |
| Latency | 40 ms | |
| Algorithm | Initial Population | Mutation and Crossover Operator |
|---|---|---|
| Benchmark NSGA-II | random | simulated binary and polynomial mutation |
| INSGA2-TG | TG | simulated binary and polynomial mutation |
| INSGA2-HR | random | Swap and HR |
| INSGA2-TGHR | TG | Swap and HR |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, X.; Wu, X.; Hu, Q. Bi-Objective Optimization for Industrial Robotics Workflow Resource Allocation in an Edge–Cloud Environment. Appl. Sci. 2021, 11, 10066. https://doi.org/10.3390/app112110066
Xie X, Wu X, Hu Q. Bi-Objective Optimization for Industrial Robotics Workflow Resource Allocation in an Edge–Cloud Environment. Applied Sciences. 2021; 11(21):10066. https://doi.org/10.3390/app112110066
Chicago/Turabian StyleXie, Xingju, Xiaojun Wu, and Qiao Hu. 2021. "Bi-Objective Optimization for Industrial Robotics Workflow Resource Allocation in an Edge–Cloud Environment" Applied Sciences 11, no. 21: 10066. https://doi.org/10.3390/app112110066
APA StyleXie, X., Wu, X., & Hu, Q. (2021). Bi-Objective Optimization for Industrial Robotics Workflow Resource Allocation in an Edge–Cloud Environment. Applied Sciences, 11(21), 10066. https://doi.org/10.3390/app112110066