
Coupled Numerical Method for Modeling Propped Fracture Behavior

Abstract
:Featured Application
Abstract
1. Introduction
2. Materials and Methods
2.1. Model Description
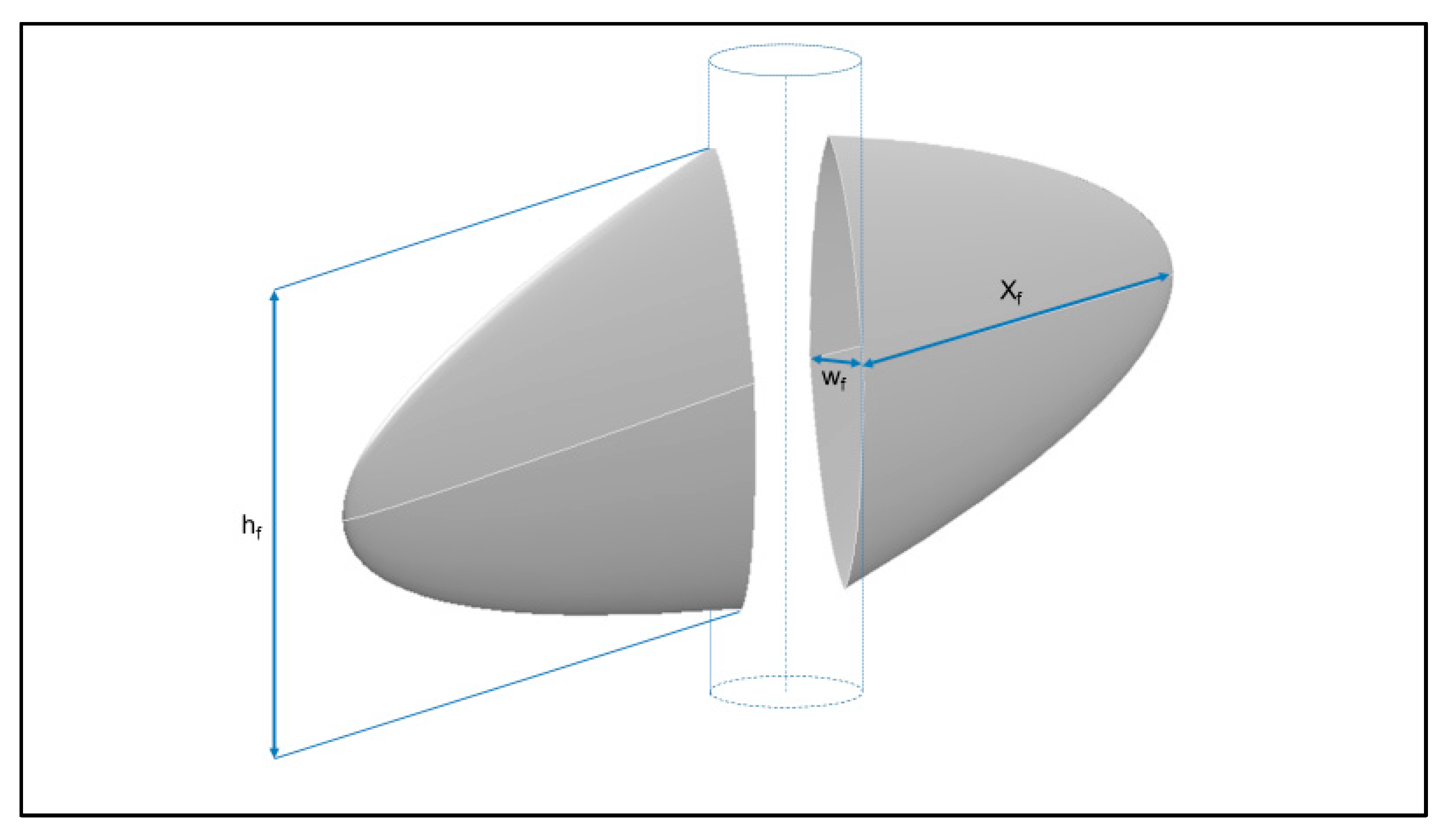
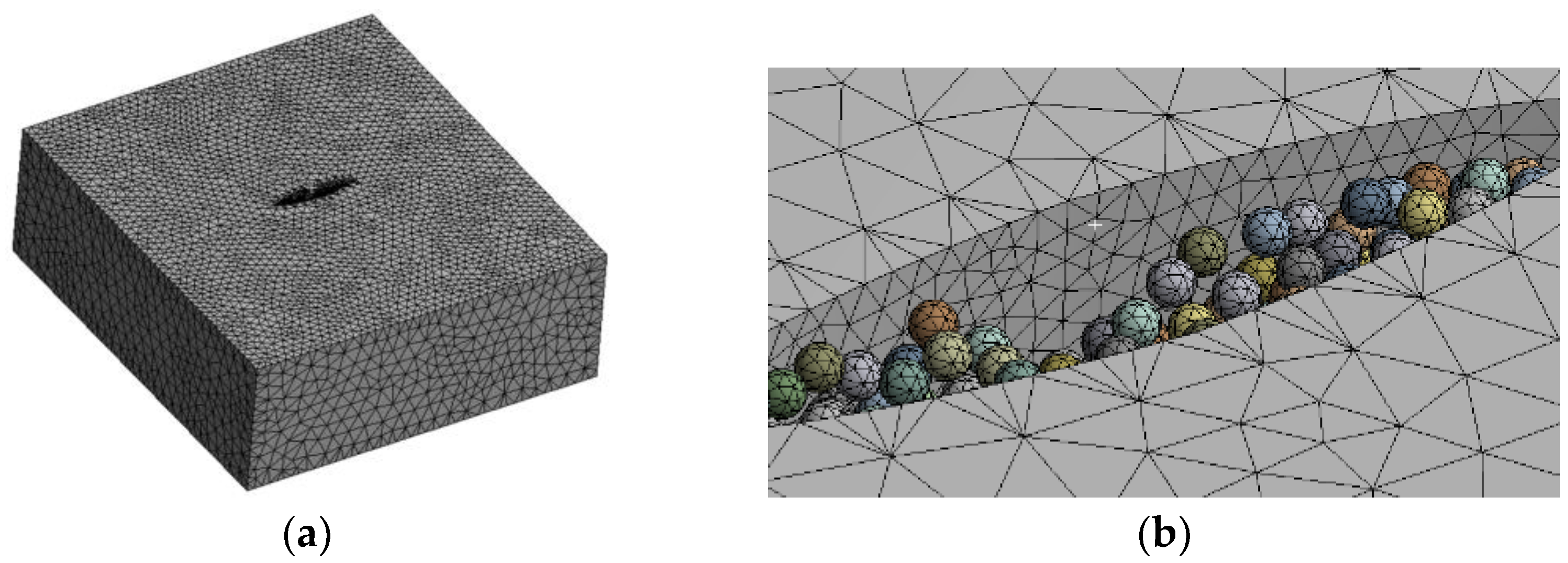
2.1.1. Geometry
2.1.2. Reservoir and Proppant
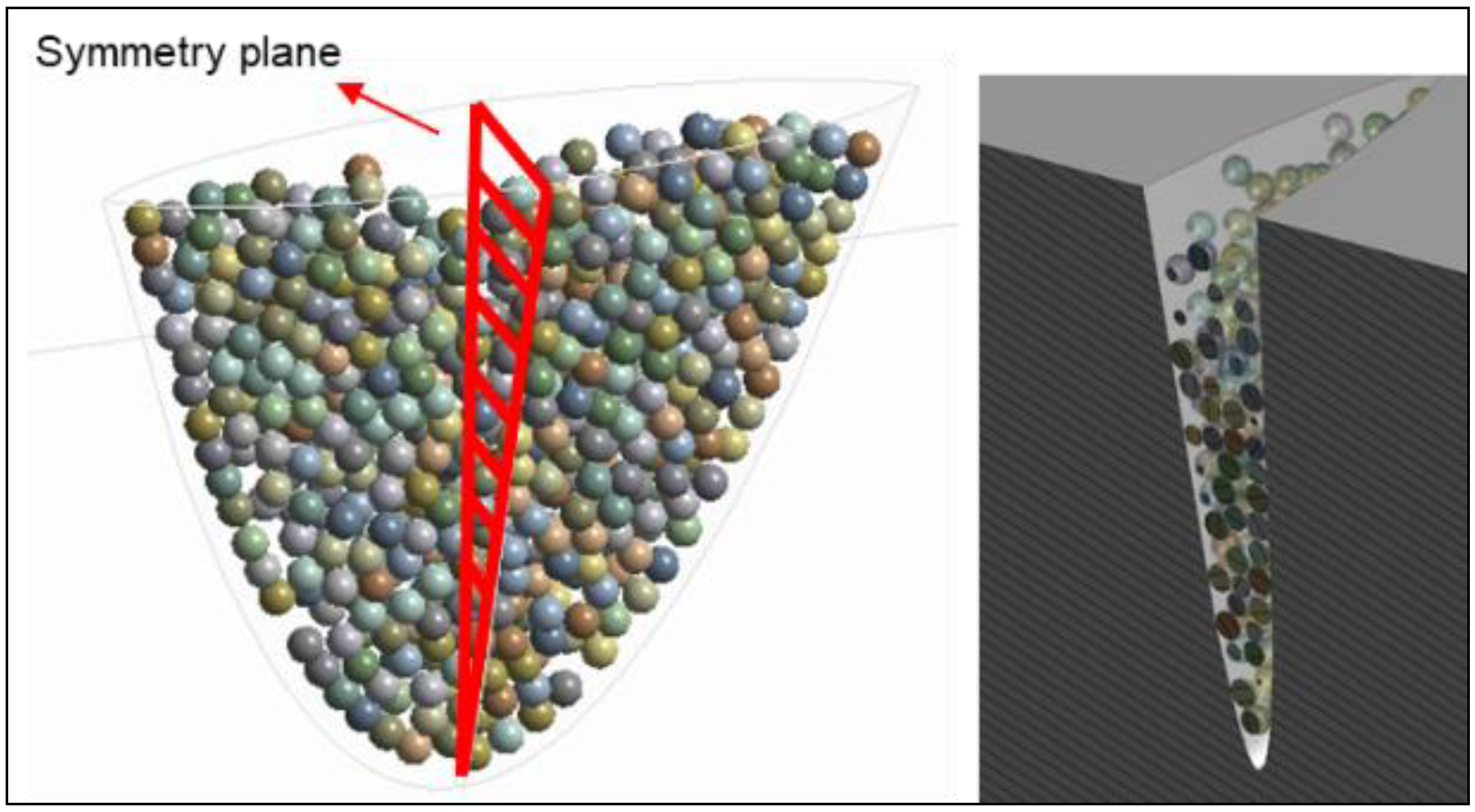
2.2. Discrete Element Modeling
Calibration Procedure
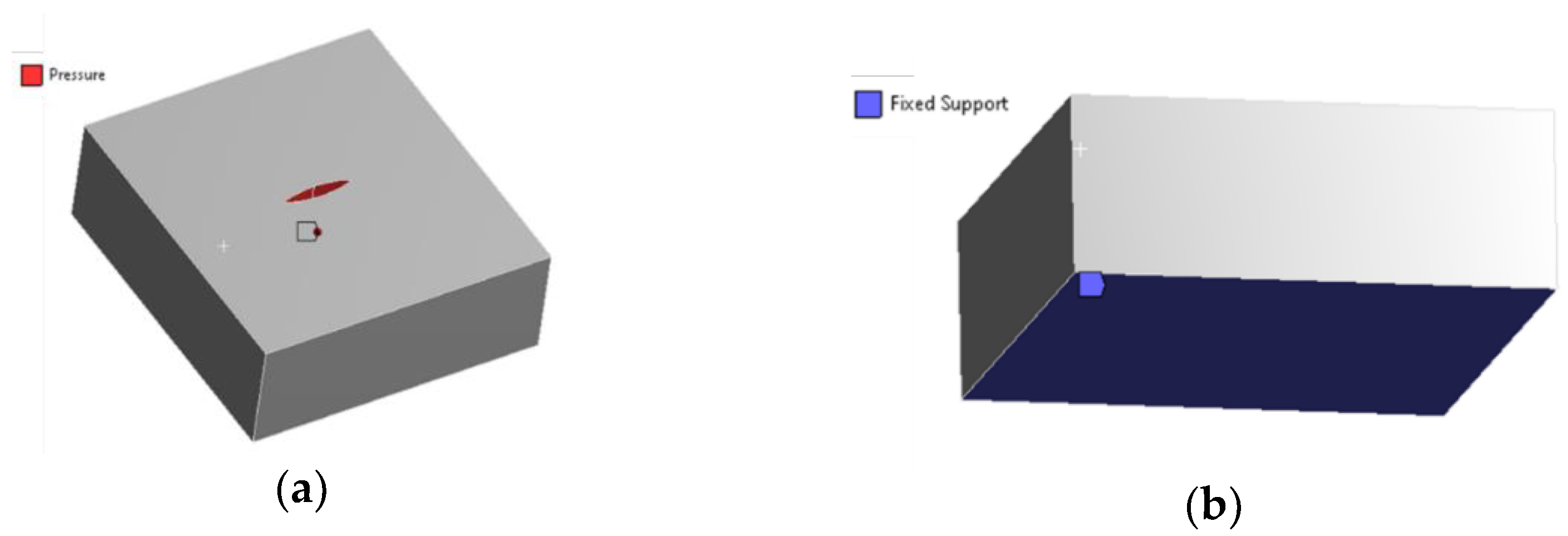
2.3. Finite Element Modeling
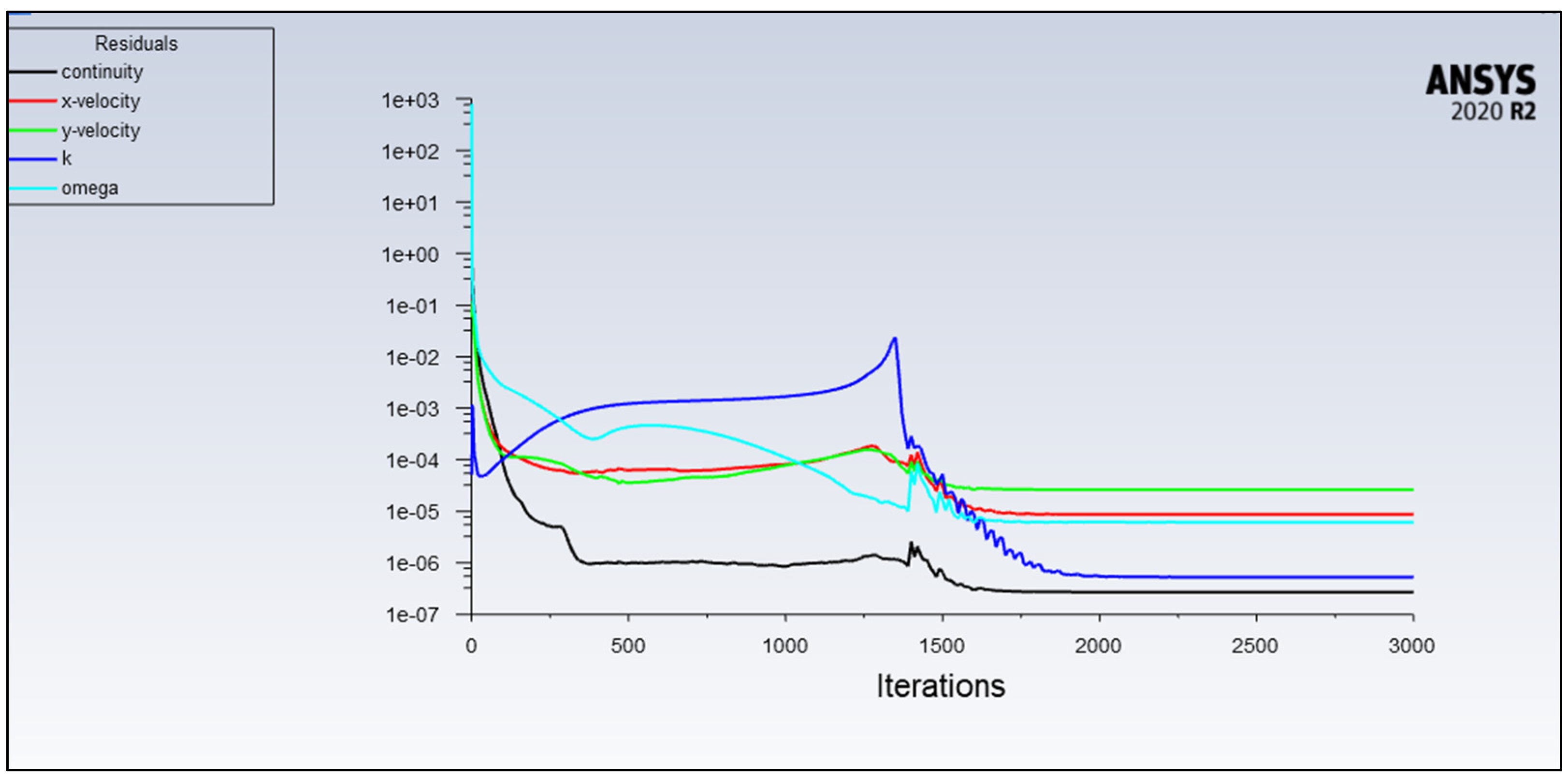
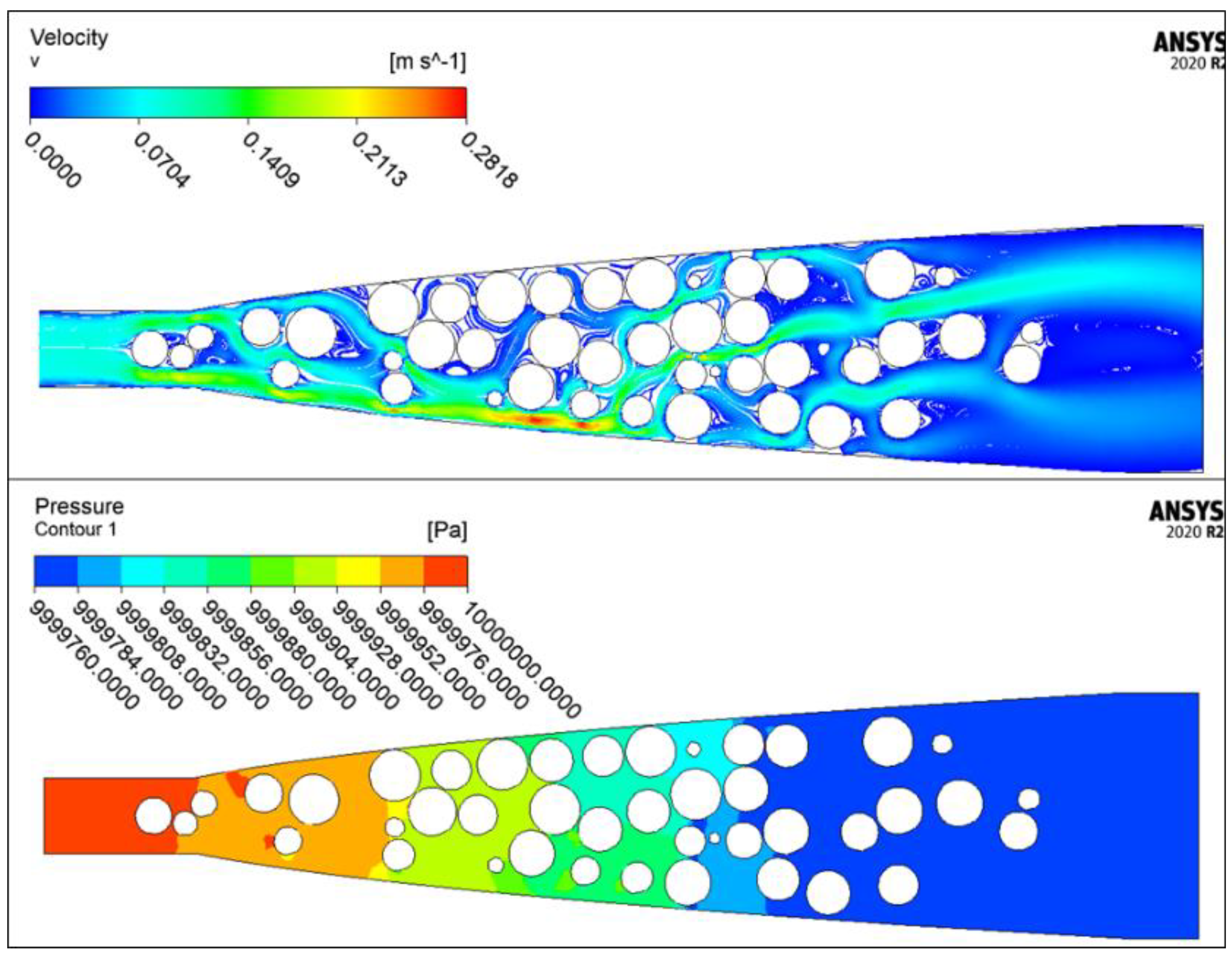
2.4. Computational Fluid Dynamics
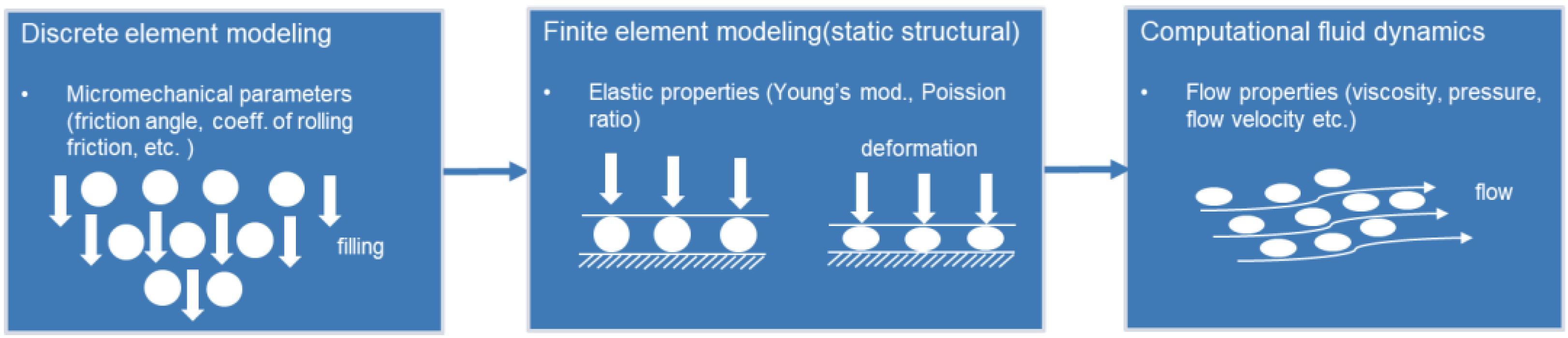
2.5. The One-Way Coupling Method
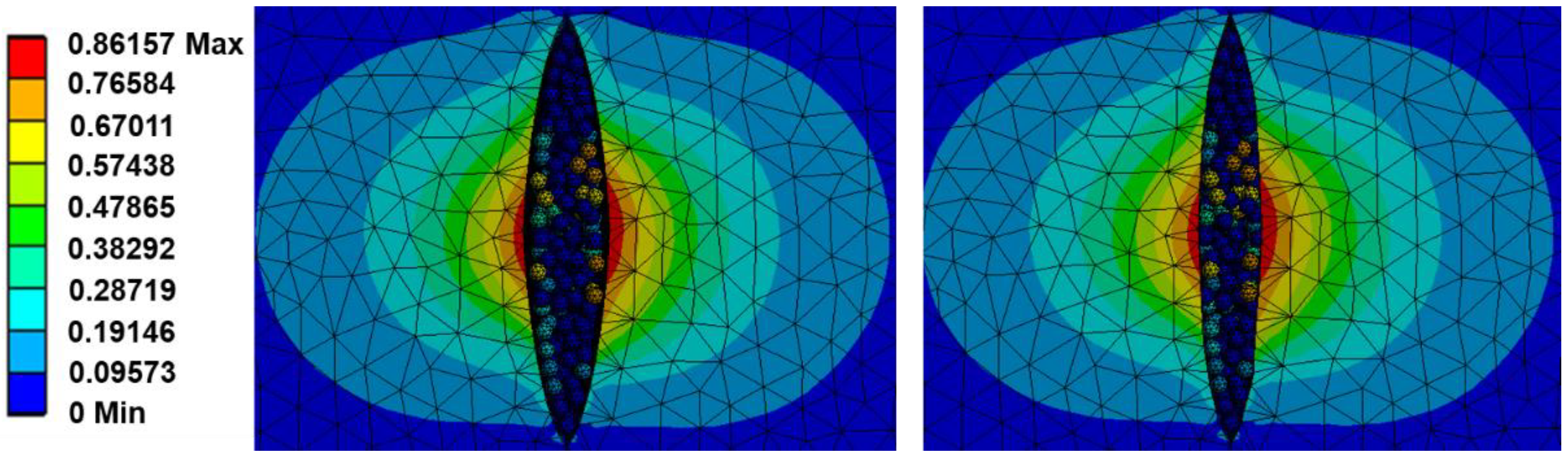
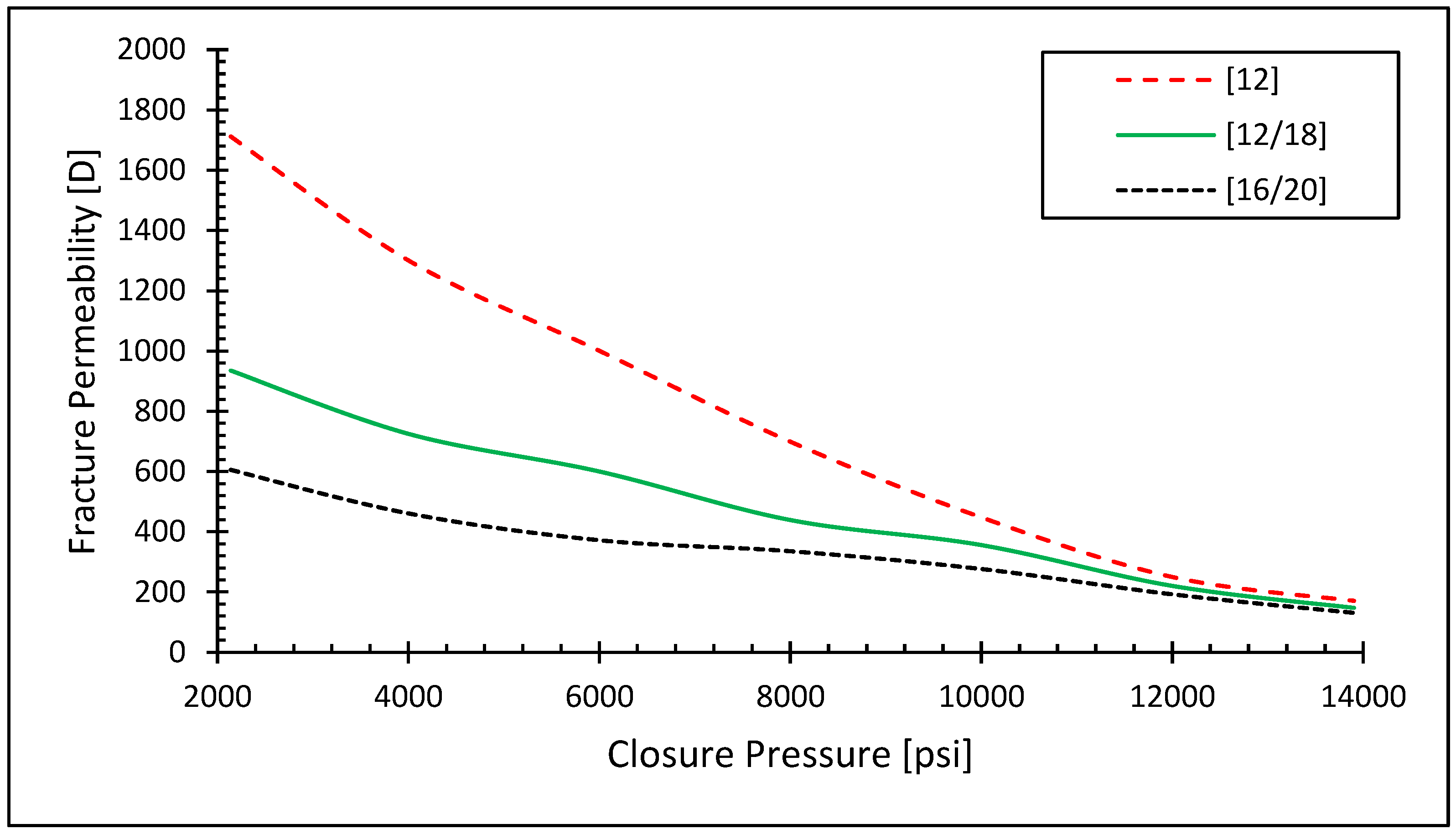
3. Results
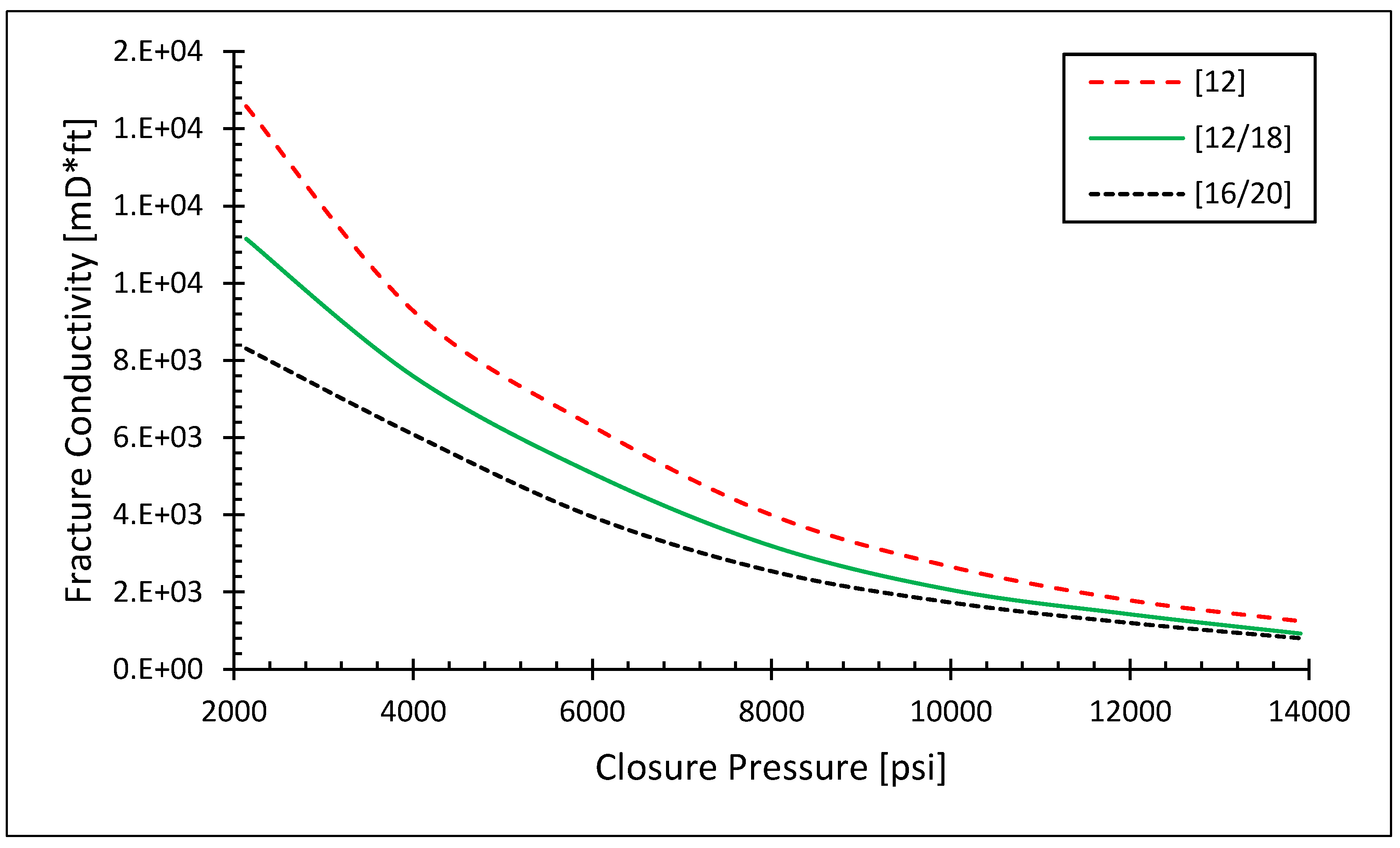
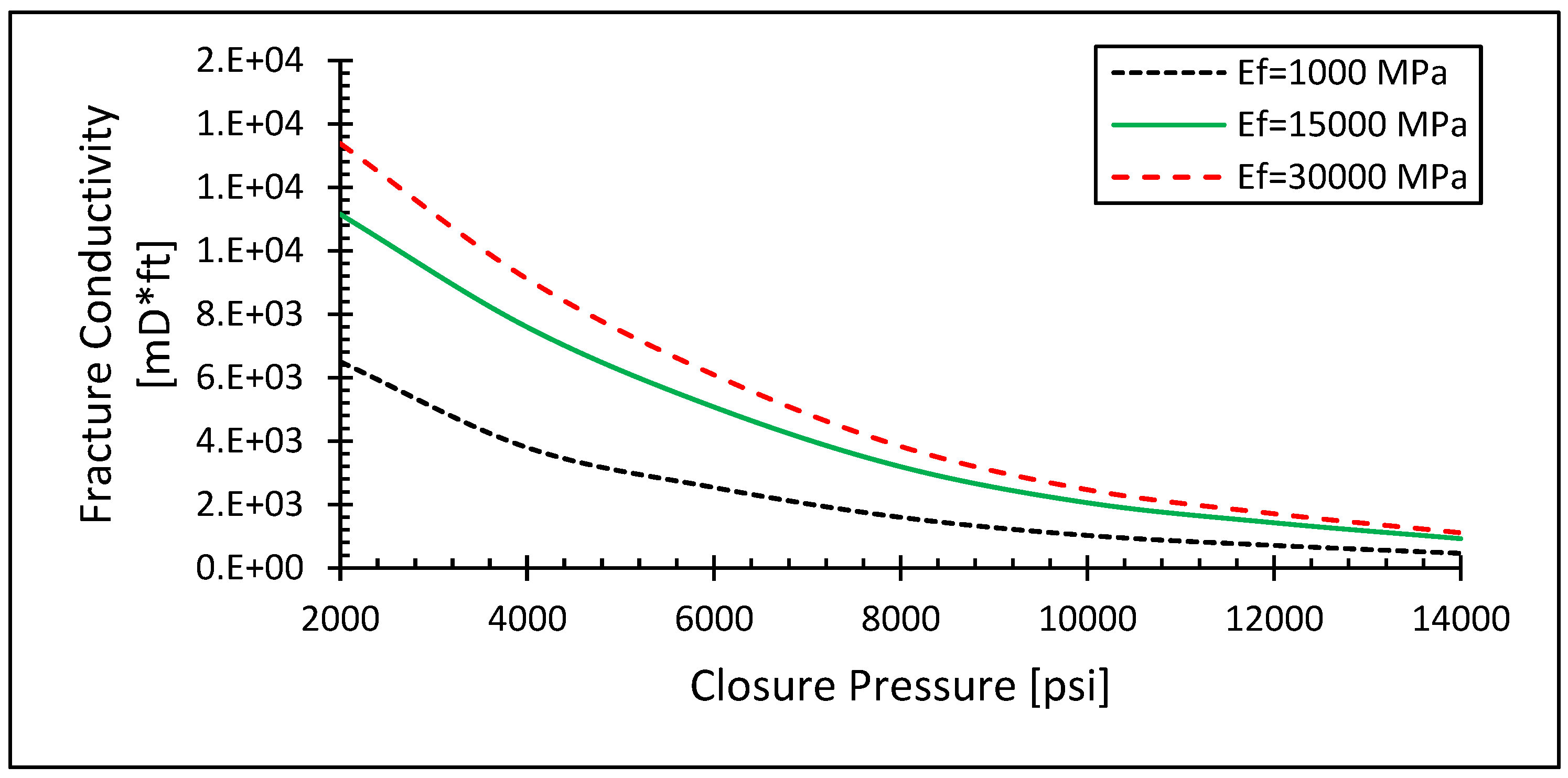
Sensitivity Analysis
- Closure pressure (Pc) 2139–13,904 psi;
- Young’s modulus of the formation (Ef) 1–30 GPa;
- Proppant diameter (Dp) 1–1.74 mm.
4. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Denney, D. Thirty Years of Gas-Shale Fracturing: What Have We Learned? J. Pet. Technol. 2010, 62, 88–90. [Google Scholar] [CrossRef]
- Economides, M.; Nolte, K. Reservoir Stimulation, 3rd ed.; John Wiley and Sons: Hoboken, NJ, USA, 2000. [Google Scholar]
- Barree, R.; Conway, M. Experimental and Numerical Modeling of Convective Proppant Transport (includes associated papers 31036 and 31068). J. Pet. Technol. 1995, 47, 216–222. [Google Scholar] [CrossRef]
- Liang, F.; Sayed, M.; Al-Muntasheri, G.; Chang, F.F. Overview of Existing Proppant Technologies and Challenges. Presented at the SPE Middle East Oil and Gas Show and Conference, Manama, Bahrain, 15–18 March 2009. [Google Scholar] [CrossRef]
- Huitt, J.L.; Mcglothlin, B.B. The Propping of Fractures in Formations Susceptible to Propping-sand Embedment. Presented at the Drilling and Production Practice, New York, NY, USA, 1 January 1958. SPE-58-115-MS. [Google Scholar]
- Volk, L.J.; Raible, C.J.; Carroll, H.B.; Spears, J.S. Embedment of High Strength Proppant into Low-Permeability Reservoir Rock. Presented at the SPE/DOE Low Permeability Gas Reservoirs Symposium, Denver, CO, USA, 27–29 May 1981. [Google Scholar] [CrossRef]
- Lacy, L.L.; Rickards, A.R.; Ali, S.A. Embedment and Fracture Conductivity in Soft Formations Associated with HEC, Borate and Water-Based Fracture Designs. Presented at the SPE Annual Technical Conference and Exhibition, San Antonio, TX, USA, 5–8 October 1997. [Google Scholar] [CrossRef]
- Lacy, L.L.; Rickards, A.R.; Bilden, D. Fracture Width and Embedment Testing in Soft Reservoir Sandstone. SPE Drill. Complet. 1998, 13, 25–29. [Google Scholar] [CrossRef]
- Guo, J.; Liu, Y. Modeling of Proppant Embedment: Elastic Deformation and Creep Deformation. Presented at the SPE International Production and Operations Conference & Exhibition, Doha, Qatar, 14–16 May 2012. [Google Scholar] [CrossRef]
- Lehman, L.V.; Parker, M.A.; Blauch, M.E.; Haynes, R.; Blackmon, A. Proppant Conductivity—What Counts and Why. Presented at the SPE Mid-Continent Operations Symposium, Oklahoma City, OK, USA, 28–31 March 1999. [Google Scholar] [CrossRef]
- Fredd, C.; McConnell, S.; Boney, C.; England, K. Experimental Study of Hydraulic Fracture Conductivity Demonstrates the Benefits of Using Proppants. Presented at the SPE Rocky Mountain Regional/Low-Permeability Reservoirs Symposium and Exhibition, Denver, CO, USA, 12–15 March 2000. [Google Scholar] [CrossRef]
- Barree, R.; Cox, S.; Barree, V.; Conway, M. Realistic Assessment of Proppant Pack Conductivity for Material Selection. Presented at the SPE Annual Technical Conference and Exhibition, Denver, CO, USA, 5–8 October 2003. [Google Scholar] [CrossRef]
- Weaver, J.D.; Rickman, R.D.; Luo, H. Fracture-Conductivity Loss Due to Geochemical Interactions between Manmade Proppants and Formations. Presented at the SPE Eastern Regional/AAPG Eastern Section Joint Meeting, Pittsburgh, PA, USA, 11–15 October 2008. [Google Scholar] [CrossRef]
- McDaniel, G.A.; Abbott, J.; Mueller, F.A.; Mokhtar, A.; Pavlova, S.; Nevvonen, O.; Parias, T.; Alary, J.A. Changing the Shape of Fracturing: New Proppant Improves Fracture Conductivity. Presented at the SPE Eastern Regional/AAPG Eastern Section Joint Meeting, Pittsburgh, PA, USA, 11–15 October 2008. [Google Scholar] [CrossRef]
- Cooke, C.J. Conductivity of Fracture Proppants in Multiple Layers. J. Pet. Technol. 1973, 25, 1101–1107. [Google Scholar] [CrossRef]
- Roodhart, L.; Kulper, T.; Davies, D.R.K. Proppant-Pack and Formation Impairment during Gas-Well Hydraulic Fracturing. SPE Prod. Eng. 1988, 3, 438–444. [Google Scholar] [CrossRef]
- Peard, N.; Macaluso, M.; Griffin, M.; Andress, R.; Callanan, M. Improved Fracturing Techniques Increase Productivity in the AWP (Olmos) Field. Presented at the SPE Production Operations Symposium, Oklahoma City, OK, USA, 7–9 April 1991. [Google Scholar] [CrossRef]
- Milton-Tayler, D.; Stephenson, C.; Asgian, M. Factors Affecting the Stability of Proppant in Propped Fractures: Results of a Laboratory Study. Presented at the SPE Annual Technical Conference and Exhibition, Washington, DC, USA, 4–7 October 1992. [Google Scholar] [CrossRef]
- Li, K.; Gao, Y.; Lyu, Y.; Wang, M. New Mathematical Models for Calculating Proppant Embedment and Fracture Conductivity. SPE J. 2015, 20, 496–507. [Google Scholar] [CrossRef]
- Sun, J.; Hu, K.; Wong, J.; Hall, B.; Schechter, D. Investigating the Effect of Improved Fracture Conductivity on Production Performance of Hydraulic Fractured Wells through Field Case Studies and Numerical Simulations. Presented at the SPE Hydrocarbon Economics and Evaluation Symposium, Houston, TX, USA, 19–20 May 2014. [Google Scholar] [CrossRef]
- Fan, M.; Han, Y.; McClure, J.; Chen, C. Hydraulic Fracture Conductivity as a Function of Proppant Concentration under Various Effective Stresses: From Partial Monolayer to Multilayer Proppants. Presented at the SPE/AAPG/SEG Unconventional Resources Technology Conference, Austin, TX, USA, 24–26 July 2017. [Google Scholar] [CrossRef]
- Zhang, F.; Zhu, H.; Zhou, H.; Guo, J.; Huang, B. Discrete-Element-Method/Computational-Fluid-Dynamics Coupling Simulation of Proppant Embedment and Fracture Conductivity After Hydraulic Fracturing. SPE J. 2017, 22, 632–644. [Google Scholar] [CrossRef]
- Fan, M.; McClure, J.; Han, Y.; Ripepi, N.; Westman, E.; Gu, M.; Chen, C. Using an Experiment/Simulation-Integrated Approach to Investigate Fracture-Conductivity Evolution and Non-Darcy Flow in a Proppant-Supported Hydraulic Fracture. SPE J. 2019, 24, 1912–1928. [Google Scholar] [CrossRef]
- Zhu, H.; Shen, J.; Zhang, F. A fracture conductivity model for channel fracturing and its implementation with Discrete Element Method. J. Pet. Sci. Eng. 2018, 172, 149–161. [Google Scholar] [CrossRef] [Green Version]
- Zhang, F.; Dontsov, E. Modeling hydraulic fracture propagation and proppant transport in a two-layer formation with stress drop. Eng. Fract. Mech. 2018, 199, 705–720. [Google Scholar] [CrossRef]
- Zheltov, A.K. Formation of Vertical Fractures by Means of Highly Viscous Liquid. In Proceedings of the 4th World Petroleum Congress, Rome, Italy, 3 June 1955. [Google Scholar]
- Perkins, T.K.; Kern, L.R. Widths of Hydraulic Fractures. J. Pet. Technol. 1961, 13, 937–949. [Google Scholar] [CrossRef]
- Economides, M.J.; Tony, M. Modern Fracturing: Enhancing Natural Gas Production; ET Publishing: Houston, TX, USA, 2007; p. 96. [Google Scholar]
- Malkowski, P.; Ostrowski, L. The Methodology for the Young Modulus Derivation for Rocks and Its Value. In Proceedings of the ISRM European Rock Mechanics Symposium-EUROCK 2017, Ostrava, Czech Republic, 20–22 June 2017. [Google Scholar]
- Chen, M.; Zhang, S.; Liu, M.; Ma, X.; Zou, Y.; Zhou, T.; Li, N.; Li, S. Calculation method of proppant embedment depth in hydraulic fracturing. Pet. Explor. Dev. 2018, 45, 159–166. [Google Scholar] [CrossRef]
- Hubbert, M.K.; Willis, D.G. Mechanics of Hydraulic Fracturing. Trans. AIME 1957, 210, 153–168. [Google Scholar] [CrossRef]
- Alvaro, C.; Jimenez, J.R. Estimation of Moduli and Densities of Rock Constituents through Global Inversion of Wire-line Data. In Proceedings of the 2003 SEG Annual Meeting, Dallas, TX, USA, October 2003. [Google Scholar] [CrossRef]
- Cinco-Ley, H.; Samaniego-V., F.; Dominguez, N. Transient Pressure Behavior for a Well with a Finite-Conductivity Vertical Fracture. Soc. Pet. Eng. J. 1978, 18, 253–264. [Google Scholar] [CrossRef] [Green Version]
- Palisch, T.T.; Duenckel, R.J.; Bazan, L.W.; Heidt, J.H.; Turk, G.A. Determining Realistic Fracture Conductivity and Understanding its Impact on Well Performance-Theory and Field Examples. In Proceedings of the SPE Hydraulic Fracturing Technology Conference, College Station, TX, USA, 29–31 January 2007. [Google Scholar] [CrossRef]
- Liang, F.; Sayed, M.; Al-Muntasheri, G.A.; Chang, F.F.; Li, L. A comprehensive review on proppant technologies. Petroleum 2015, 2, 26–39. [Google Scholar] [CrossRef] [Green Version]
- Cundall, P.A.; Strack, O.D.L. A discrete numerical model for granular assemblies. Geotechnique 1979, 29, 47–65. [Google Scholar] [CrossRef]
- Ketterhagen, W.R.; Curtis, J.S.; Wassgren, C.R.; Kong, A.; Narayan, P.J.; Hancock, B.C. Granular segregation in discharging cylindrical hoppers: A discrete element and experimental study. Chem. Eng. Sci. 2007, 62, 6423–6439. [Google Scholar] [CrossRef]
- Oldal, I.; Keppler, I.; Csizmadia, B.; Fenyvesi, L. Outflow properties of silos: The effect of arching. Adv. Powder Technology. 2012, 23, 290–297. [Google Scholar] [CrossRef]
- Keppler, I. Failure analysis of pebble bed reactors during earthquake by discrete element method. Nucl. Eng. Des. 2013, 258, 102–106. [Google Scholar] [CrossRef]
- Šmilauer, V.; Chareyre, B. Yade dem formulation. In Yade Documentation, 1st ed.; Šmilauer, V., Ed.; The Yade Project: Lowestoft, UK, 2010. [Google Scholar]
- Park, J.; Kang, N. Applications of fiber models based on discrete element method to string vibration. J. Mech. Sci. Technol. 2009, 23, 372–380. [Google Scholar] [CrossRef]
- Bagi, K. Fundaments of the Discrete Element Method, 1st ed.; Budapest University of Technology and Economics: Hungary, Budapest, 2012; p. 73. [Google Scholar]
- Keppler, I.; Safranyik, F.; Oldal, I. Shear test as calibration experiment for DEM simulations: A sensitivity study. Eng. Comput. 2016, 33. [Google Scholar] [CrossRef]
- Varga, A.; Lengyel, T.; Safranyik, F. Determination of micromechanical parameters of proppant particles. IJIRAE Int. J. Res. Adv. Eng. 2020, VII, 15–21. [Google Scholar]
- Turner, M.J.; Clough, R.W.; Martin, H.C.; Topp, L.J. Stiffness and Deflection Analysis of Complex Structures. J. Aeronaut. Sci. 1956, 23, 805–823. [Google Scholar] [CrossRef]
- John, D.A. Computational Fluid Dynamics, the Basics with Applications International Editions, 1st ed.; McGraw-Hill Inc.: New York, NY, USA, 1995; pp. 60–75. [Google Scholar]
- Bathe, K.J.; Saunders, H. Finite Element Procedures in Engineering Analysis. J. Press. Vessel. Technol. 1984, 106, 421–422. [Google Scholar] [CrossRef]
- Renkes, I.; Anschutz, D.; Sutter, K.; Rickards, A. Long Term Conductivity vs. Point Specific Conductivity. In Proceedings of the SPE Hydraulic Fracturing Technology Conference and Exhibition, The Woodlands, TX, USA, 24–26 January 2017. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Proppant | Silo |
|---|---|---|
| Poisson-ratio, ν [-] | 0.25 | 0.3 |
| Young modulus, E [Pa] | 5 × 1010 | - |
| Density, ρe [kg/m3] | 5100 | 5100 |
| Friction angle, φ [°] | 10 | 1 |
| Coeff. of rolling friction, f [m] | 0.0001 | 0 |
| Proppant Diameter [mm] | Nodes | Elements |
|---|---|---|
| 1 | 379,043 | 187,117 |
| 1.37 | 195,523 | 100,071 |
| 1.74 | 173,006 | 93,518 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lengyel, T.; Varga, A.; Safranyik, F.; Jobbik, A. Coupled Numerical Method for Modeling Propped Fracture Behavior. Appl. Sci. 2021, 11, 9681. https://doi.org/10.3390/app11209681
Lengyel T, Varga A, Safranyik F, Jobbik A. Coupled Numerical Method for Modeling Propped Fracture Behavior. Applied Sciences. 2021; 11(20):9681. https://doi.org/10.3390/app11209681
Chicago/Turabian StyleLengyel, Tamás, Attila Varga, Ferenc Safranyik, and Anita Jobbik. 2021. "Coupled Numerical Method for Modeling Propped Fracture Behavior" Applied Sciences 11, no. 20: 9681. https://doi.org/10.3390/app11209681
APA StyleLengyel, T., Varga, A., Safranyik, F., & Jobbik, A. (2021). Coupled Numerical Method for Modeling Propped Fracture Behavior. Applied Sciences, 11(20), 9681. https://doi.org/10.3390/app11209681