
Performance Improvement in a Wavy Twisted Rudder by Alignment of the Wave Peak


Abstract
1. Introduction
2. Materials and Methods
2.1. Target Ship and Propeller
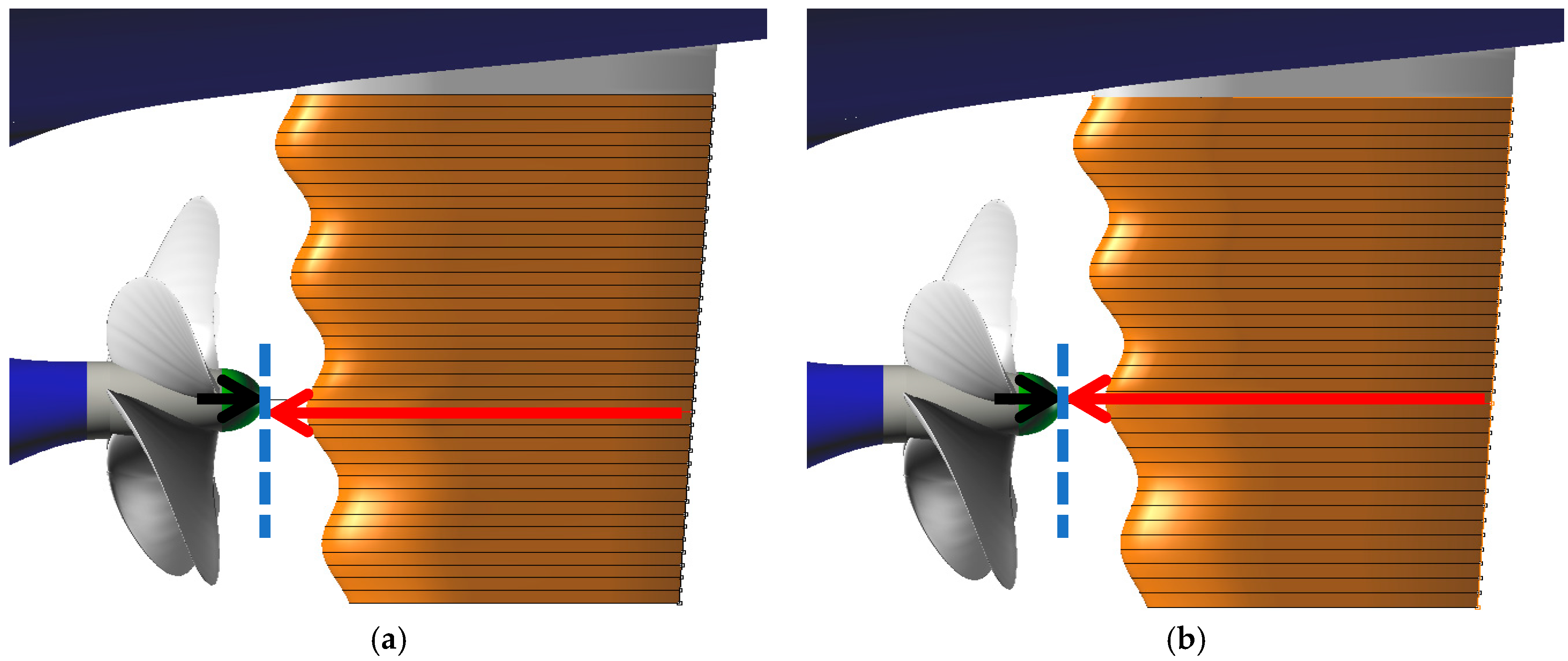
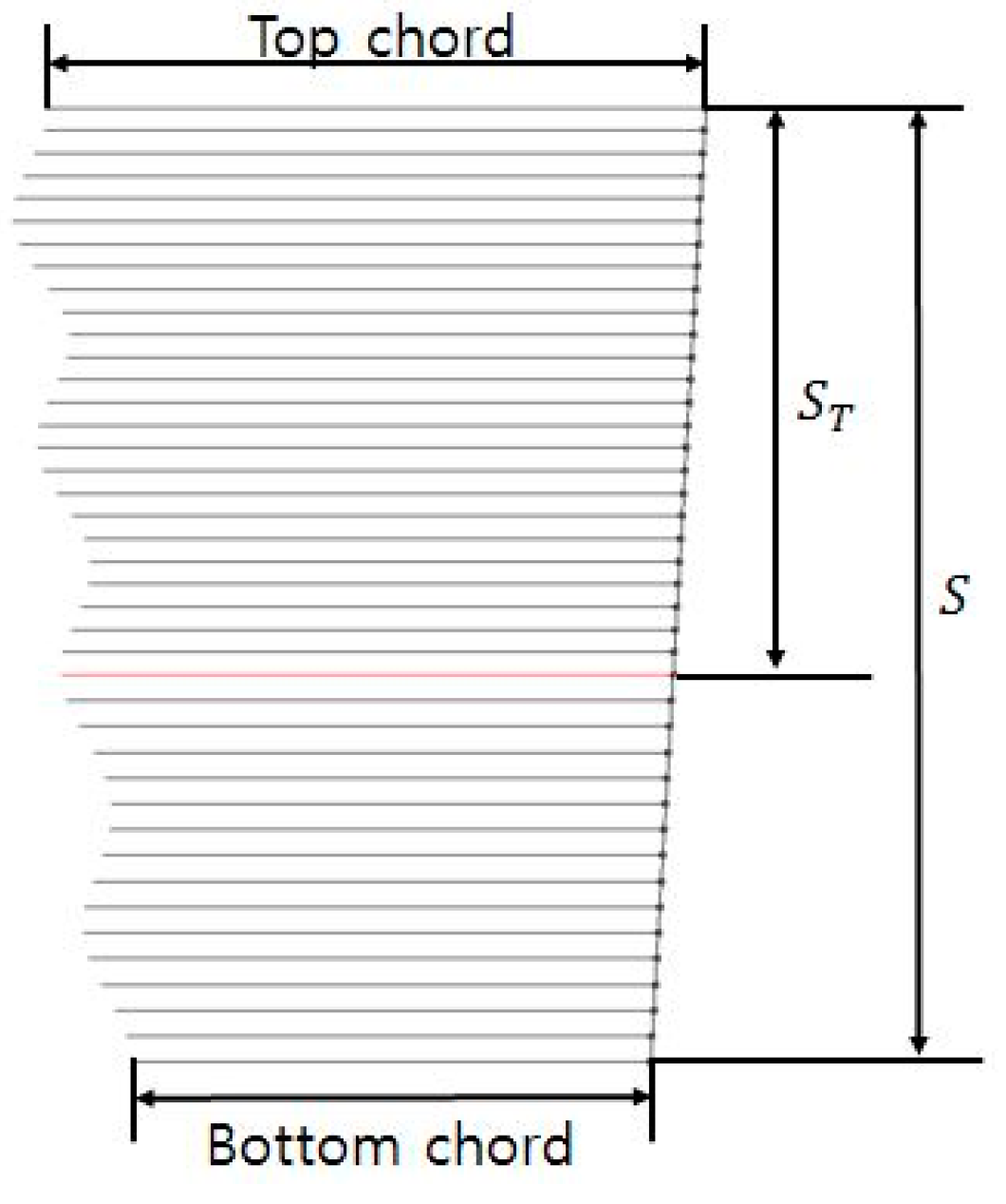
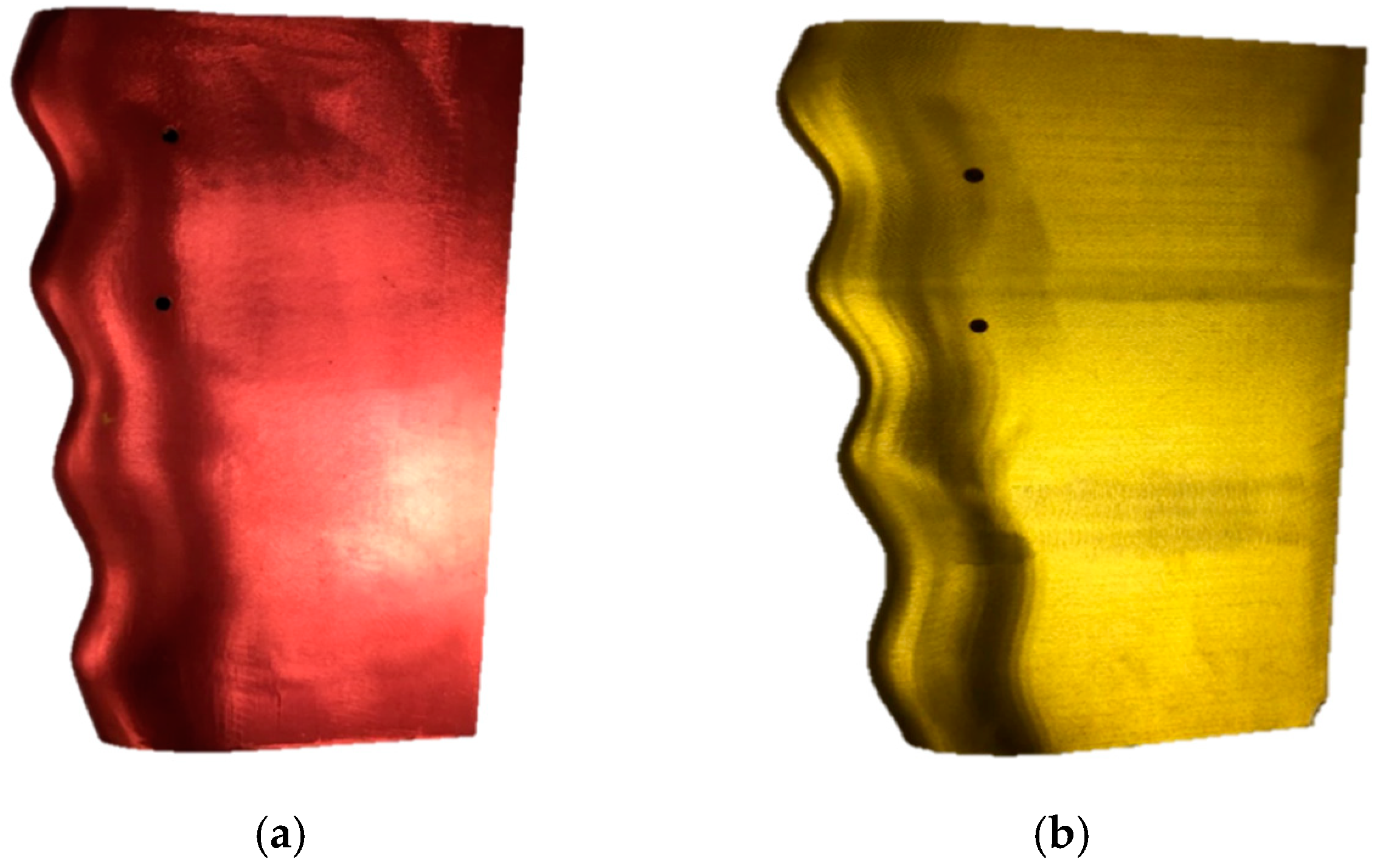
2.2. Design of Aligned Wavy Twisted Rudder
2.3. Computation Setup
2.3.1. Governing Equations
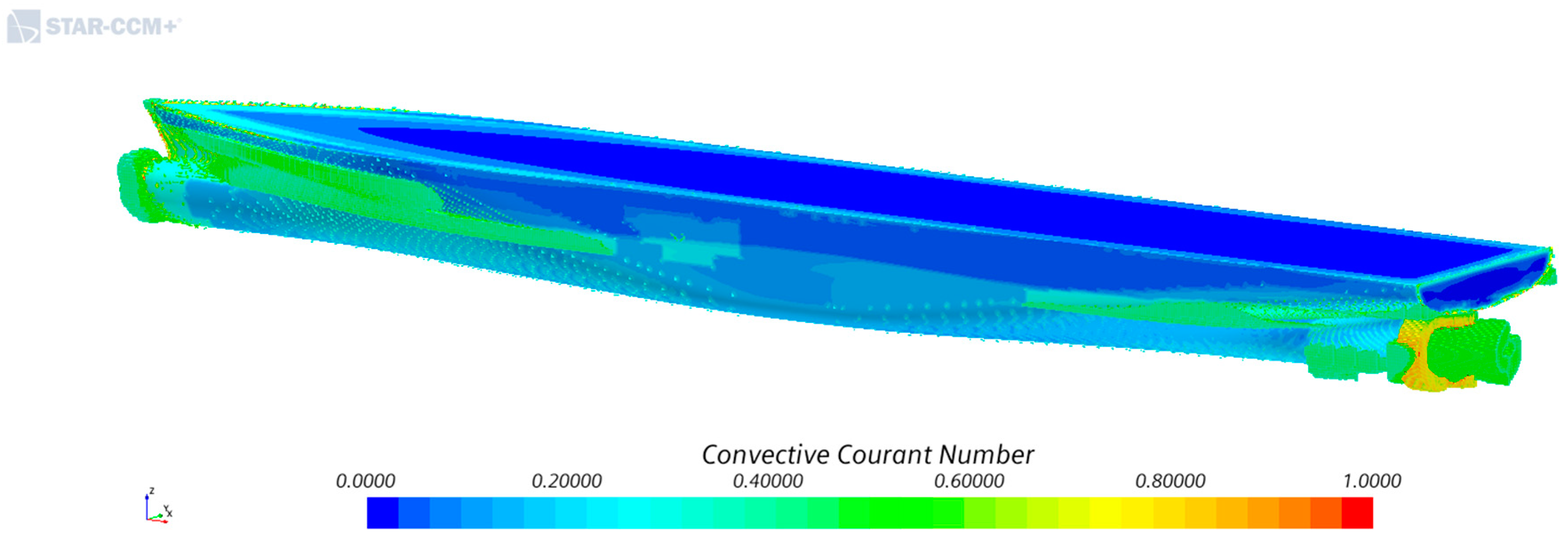
2.3.2. Numerical Method
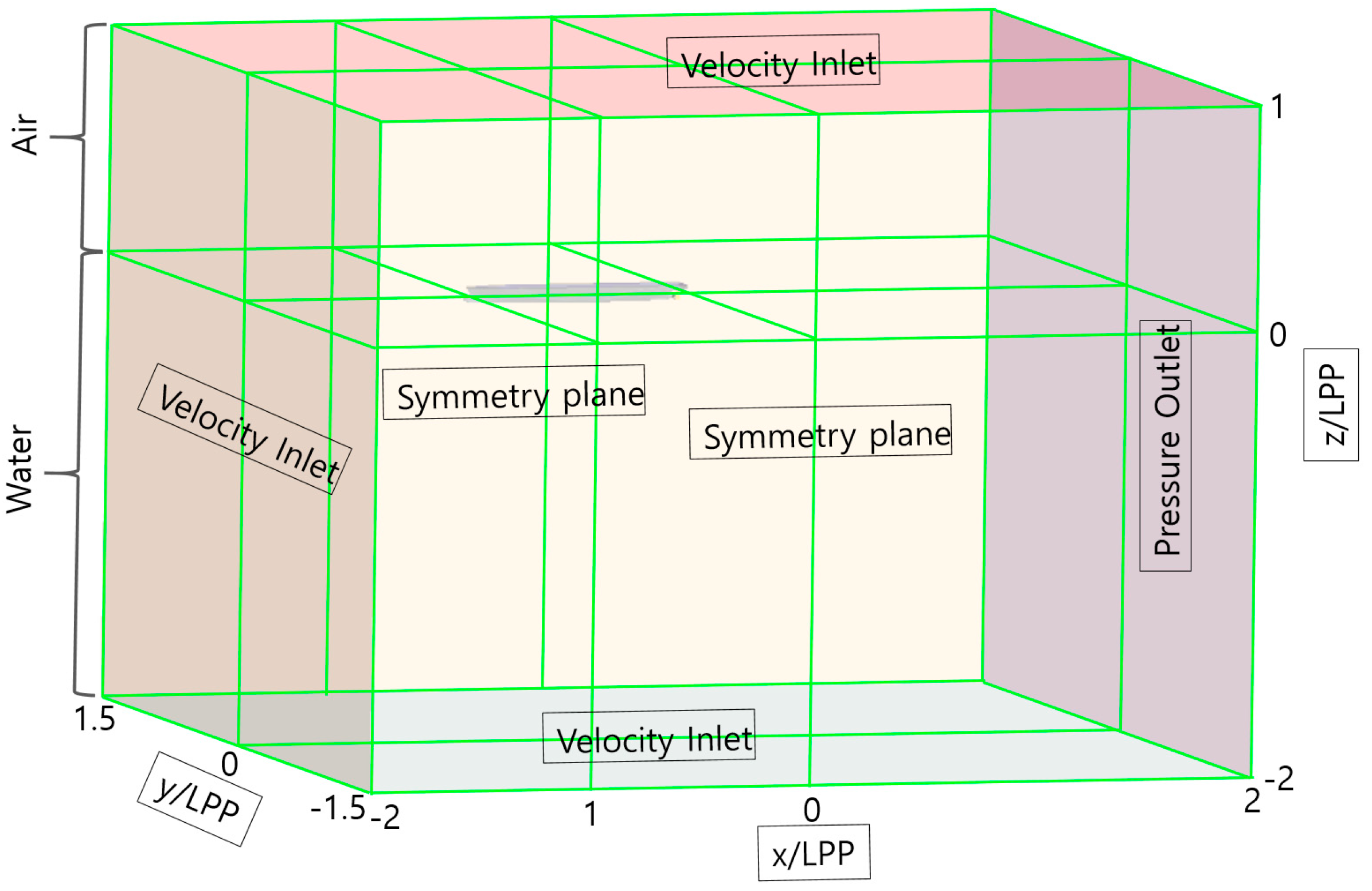
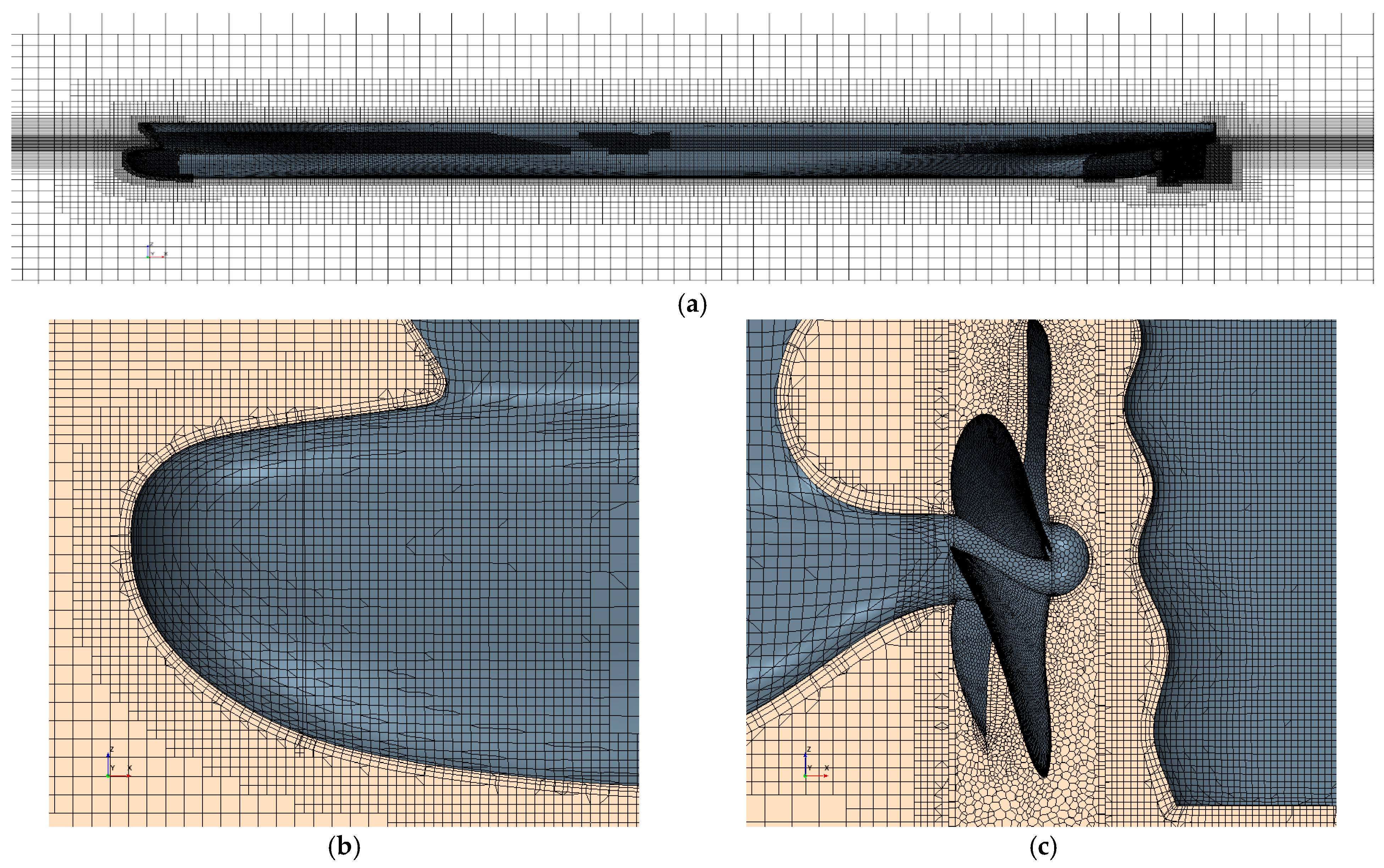
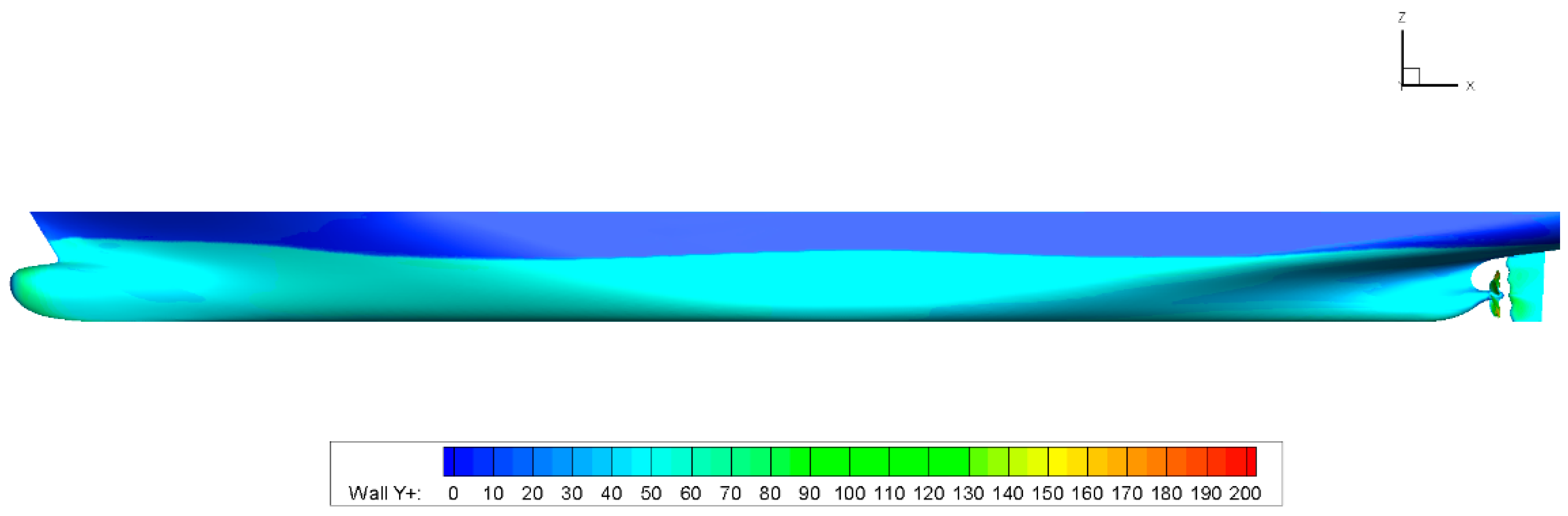
2.3.3. Boundary Conditions and Grid System
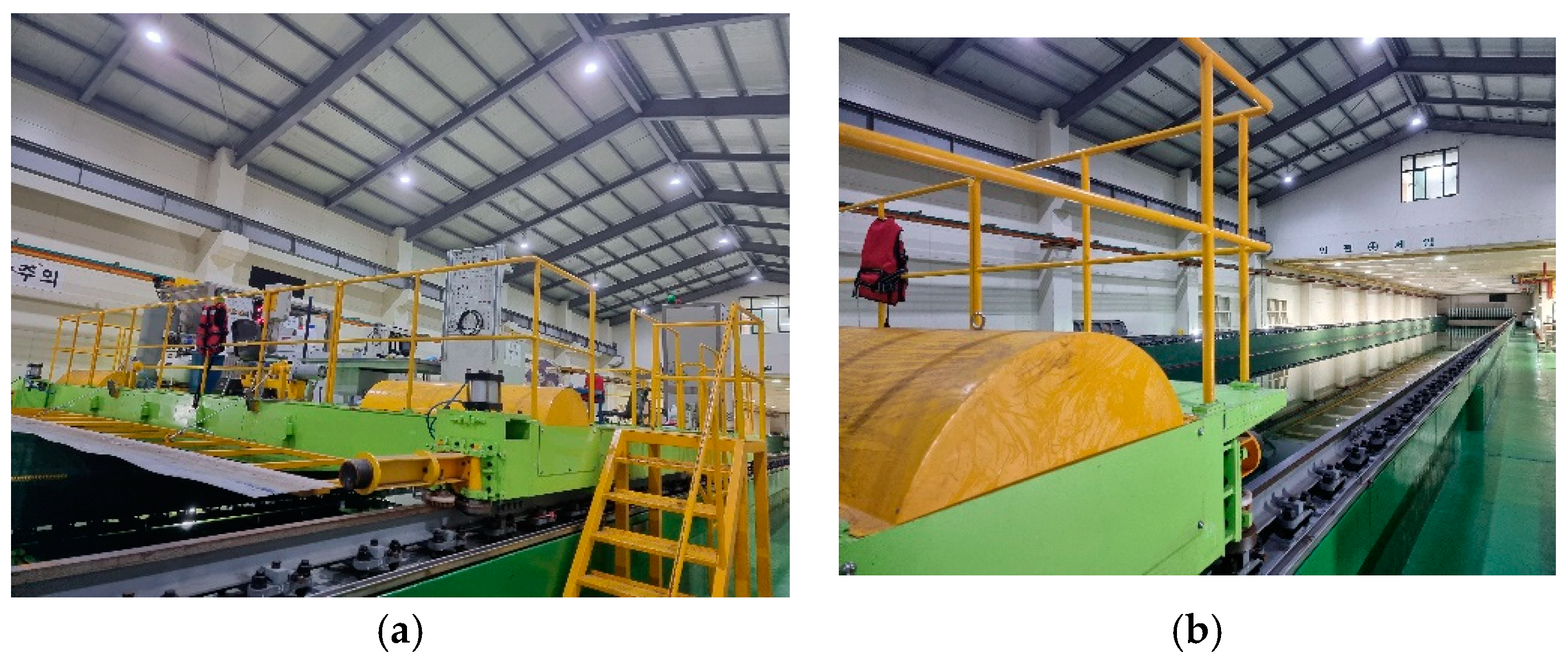
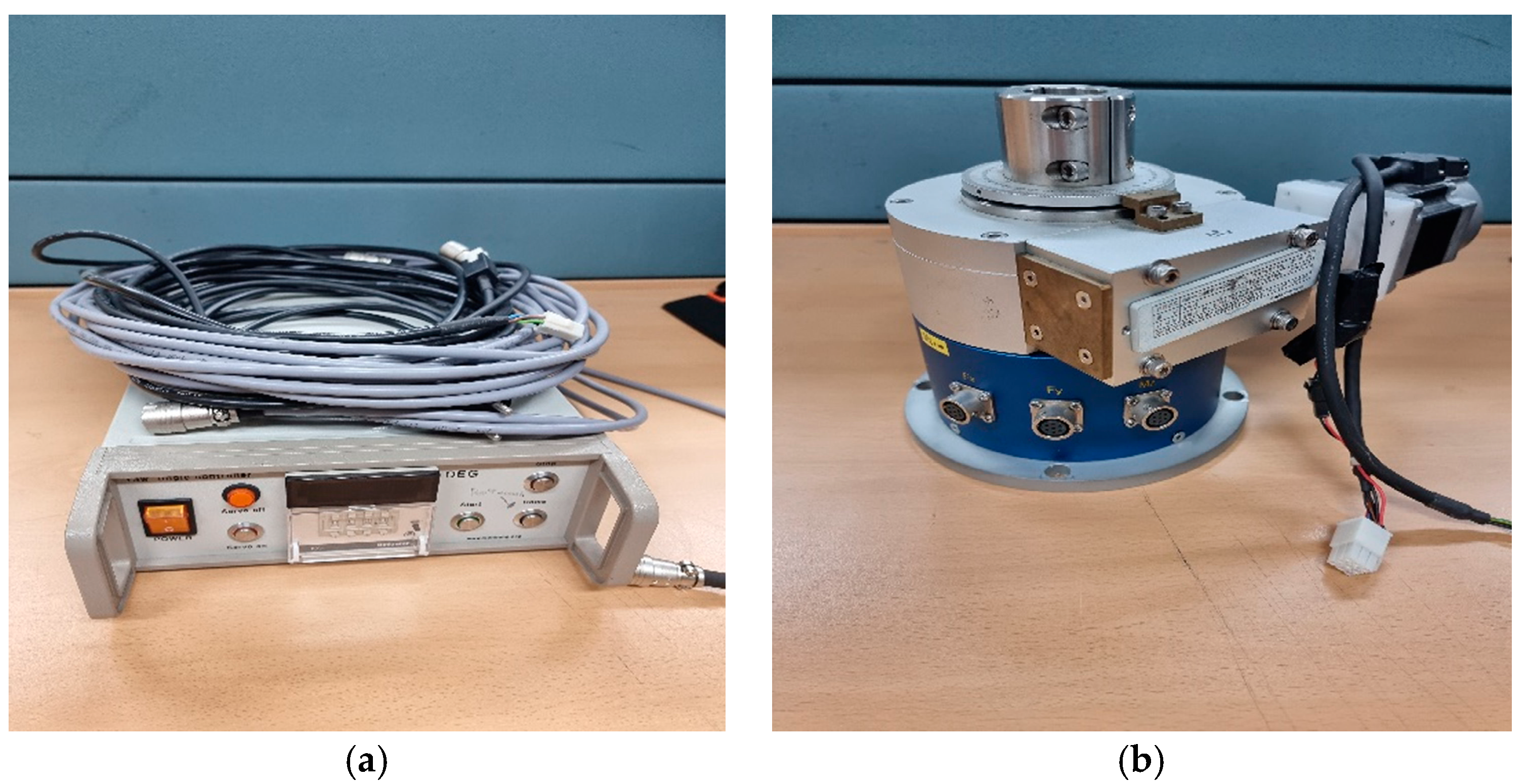
2.4. Experimental Setup
3. Results and Discussion
3.1. Resistance Results
3.2. Self-Propulsion Results
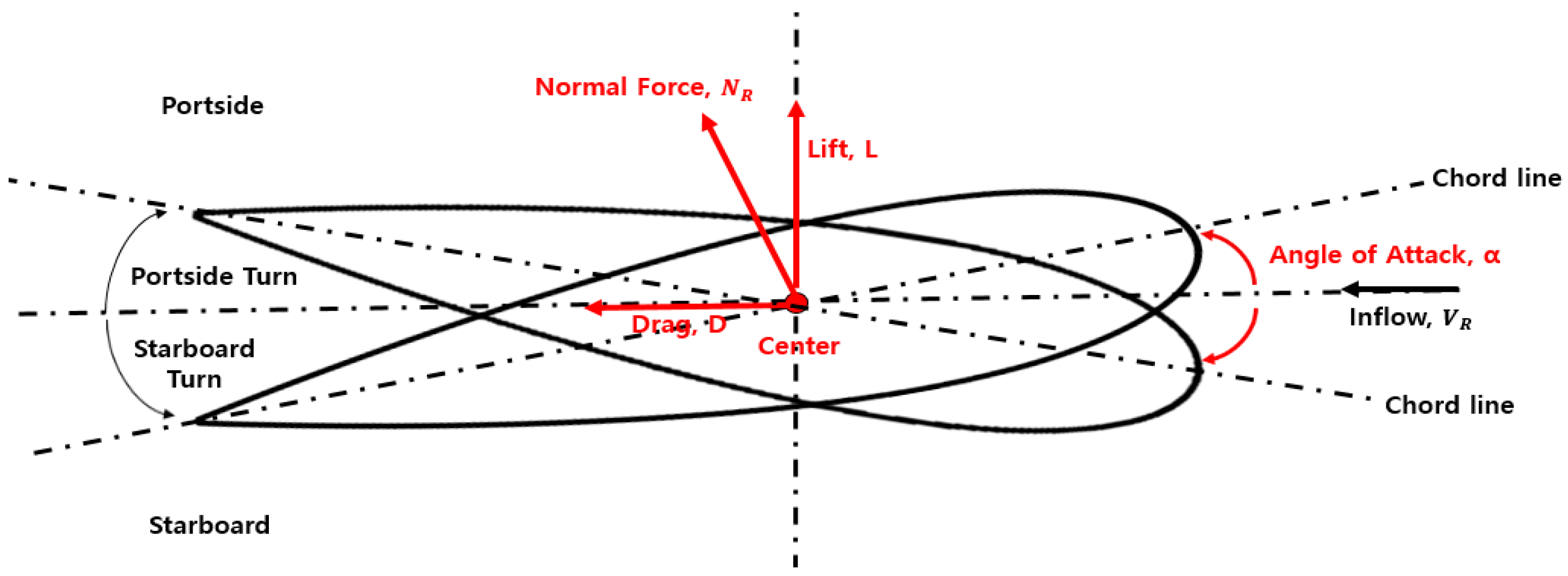
3.3. Rudder Force Results
3.3.1. Model Test Results
3.3.2. Comparison of Numerical and Experimental Rudder Force Results
4. Conclusions
- (1)
- In terms of the self-propulsion performance, the efficiency of the AWTR was superior to that of the WTR, although the gain was not large (+0.3%).
- (2)
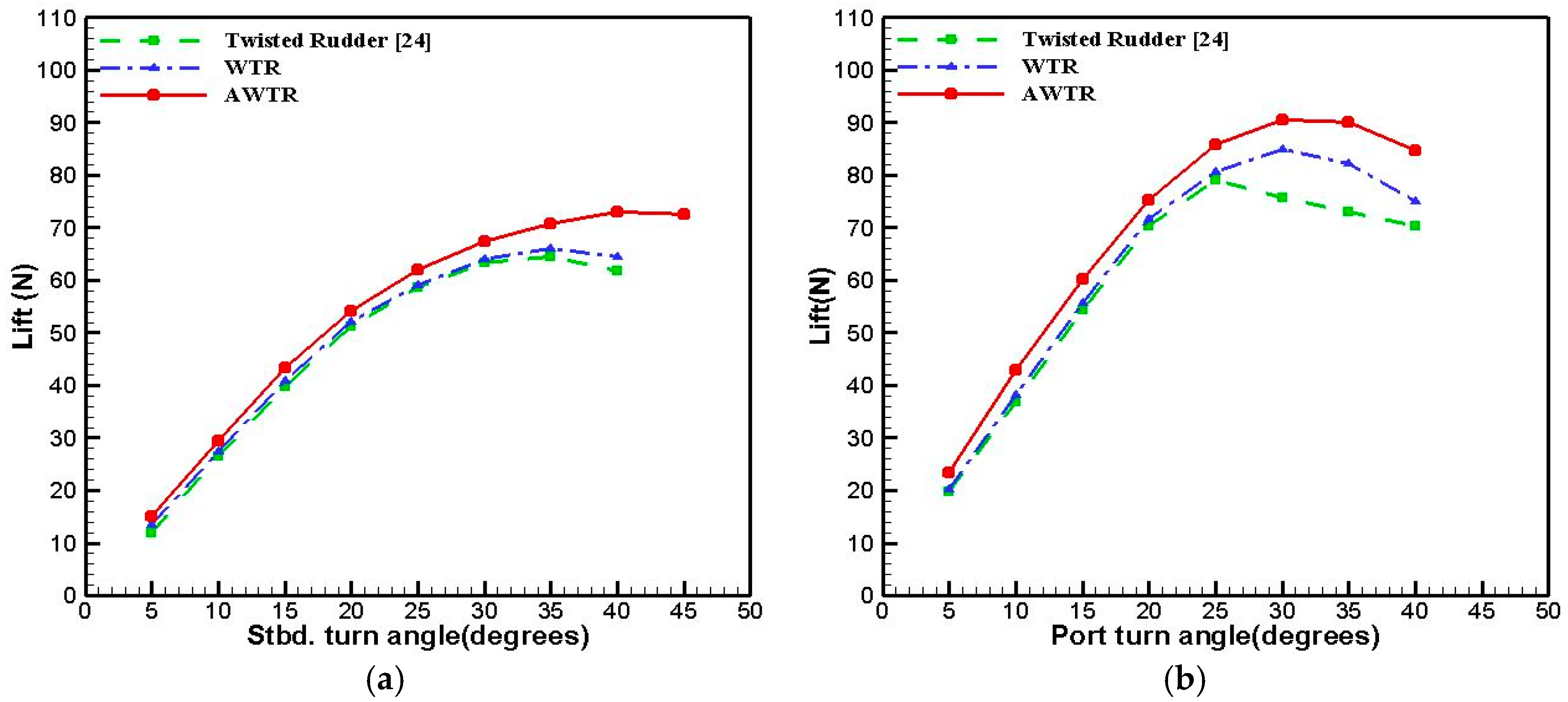
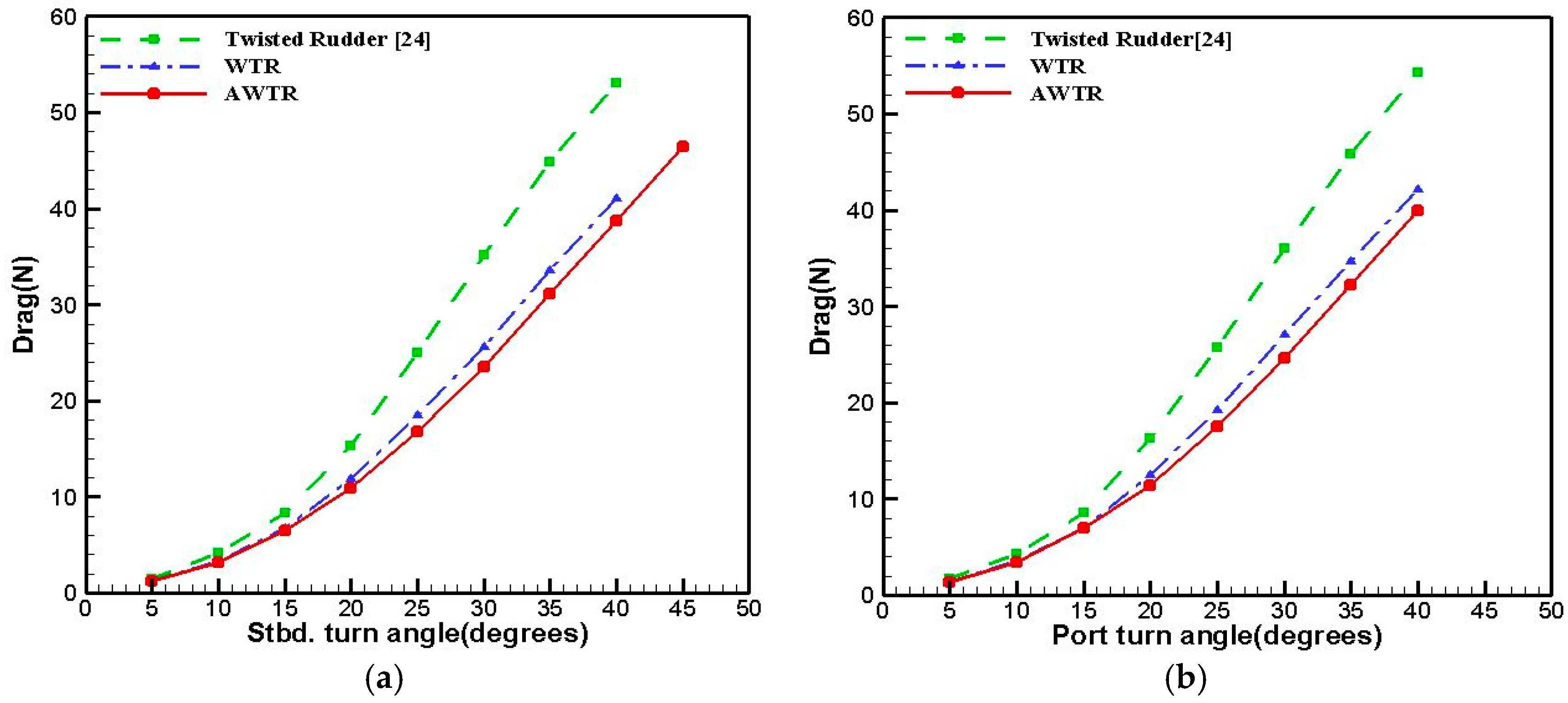
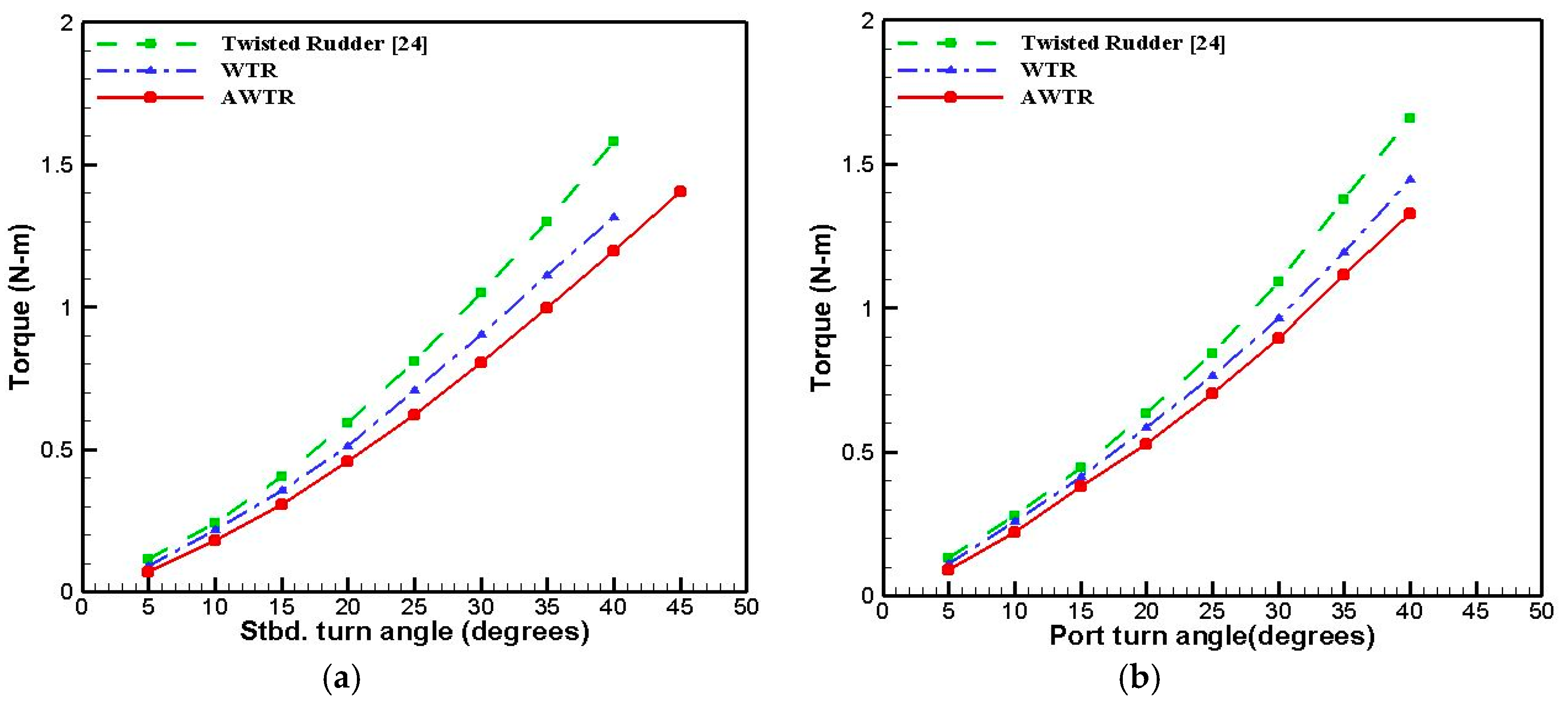
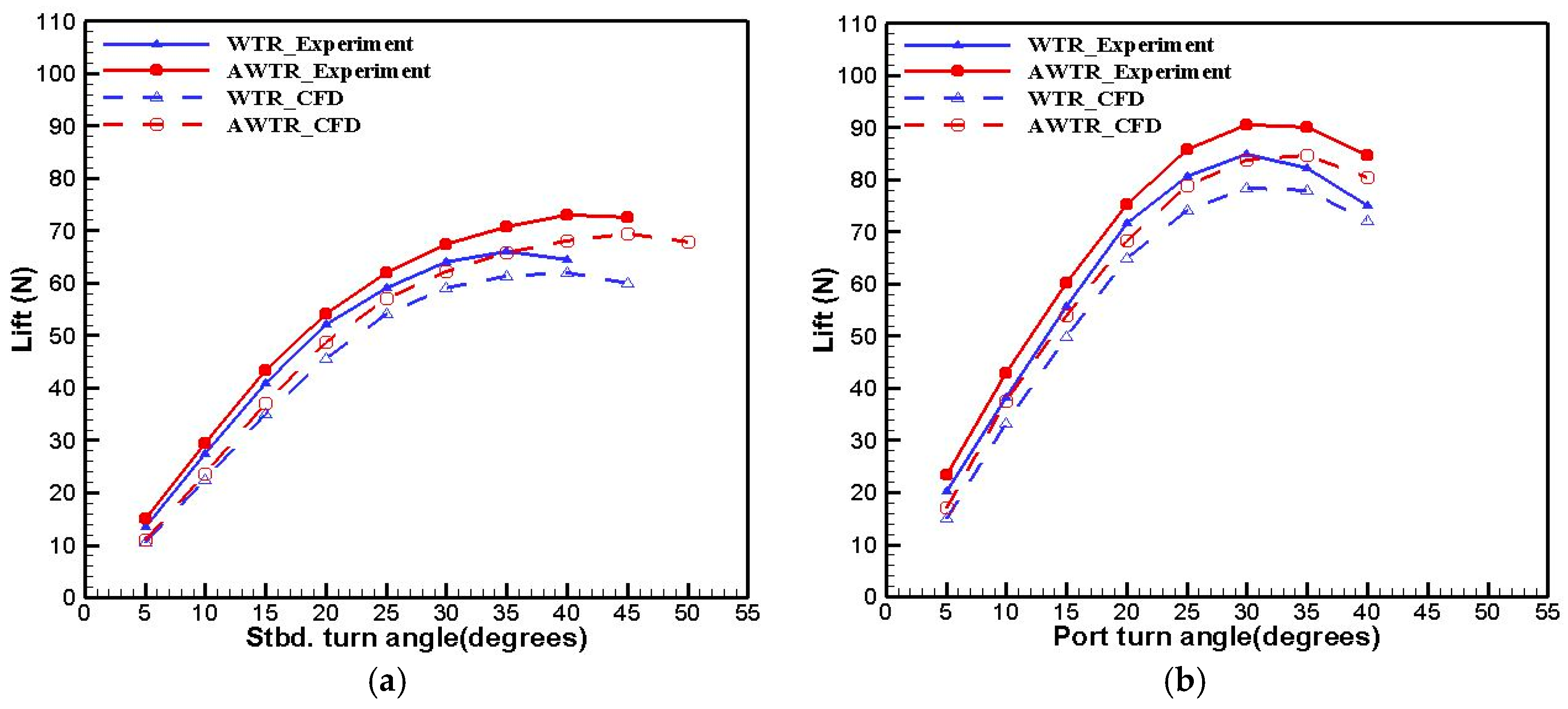
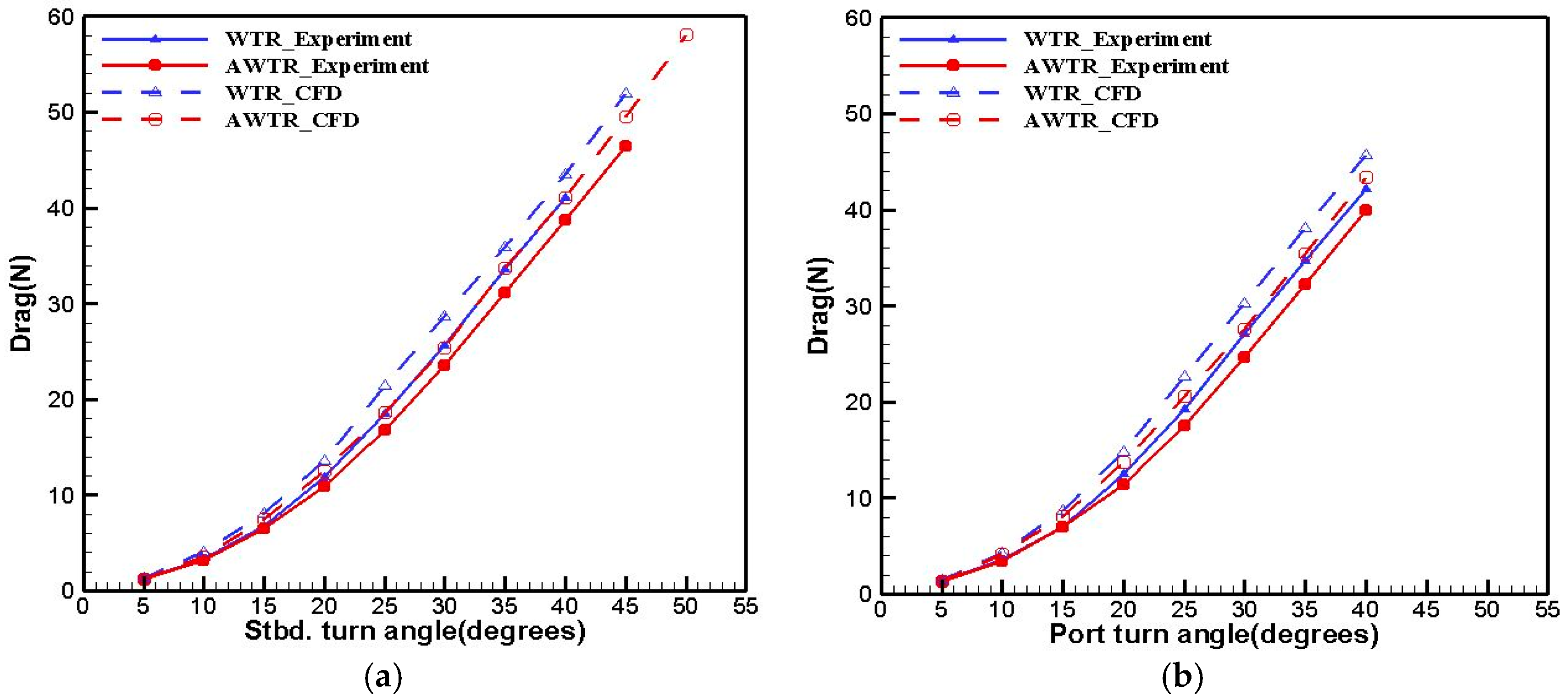
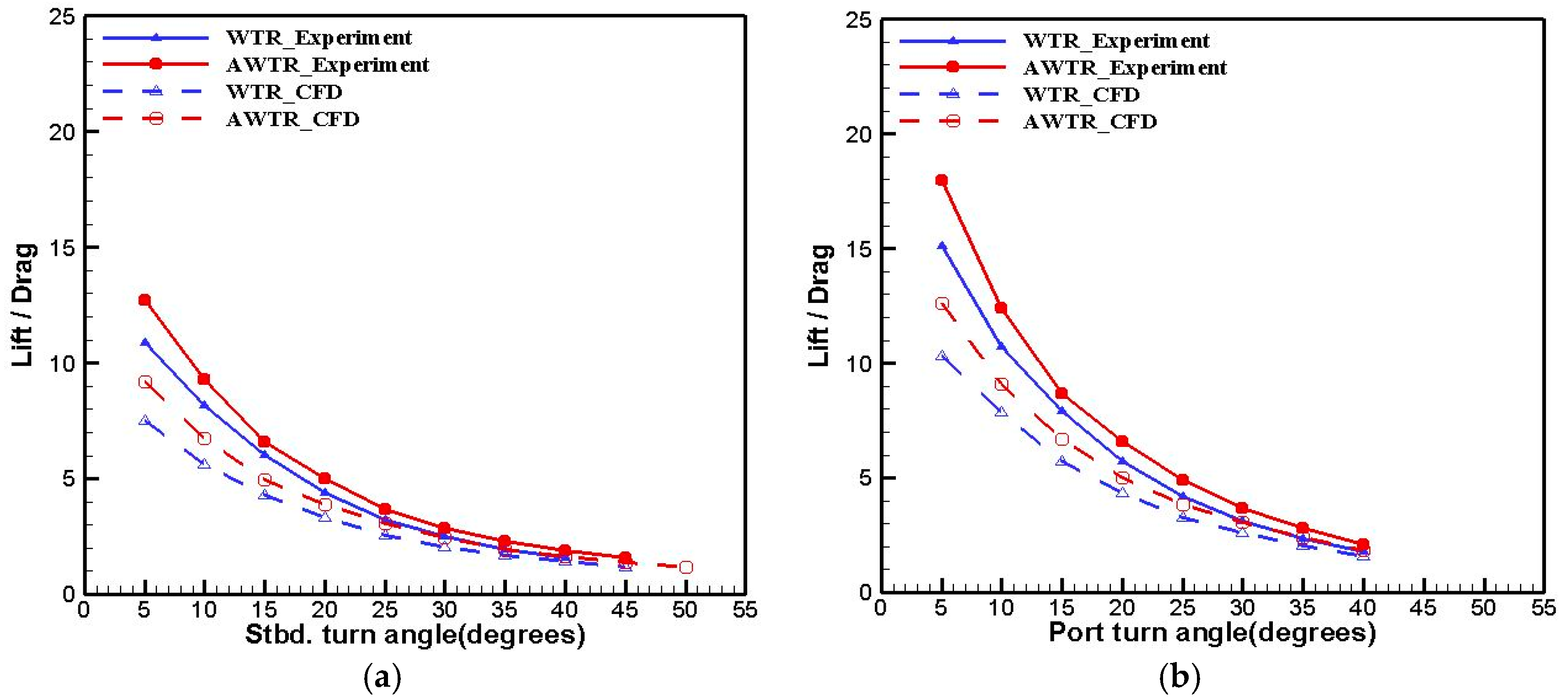
- Regarding the performance of the rudder force, the lift, drag, and torque of each rudder were computed and measured for rotation angles from 5° to 40° in increments of 5°, to both the portside and starboard. On the portside and starboard turns, the lift coefficient distribution of the AWTR was greater than that of the WTR in both the model test and the numerical analyses. The stall point of the AWTR was delayed by approximately 5° compared with the WTR on both turns.
- (3)
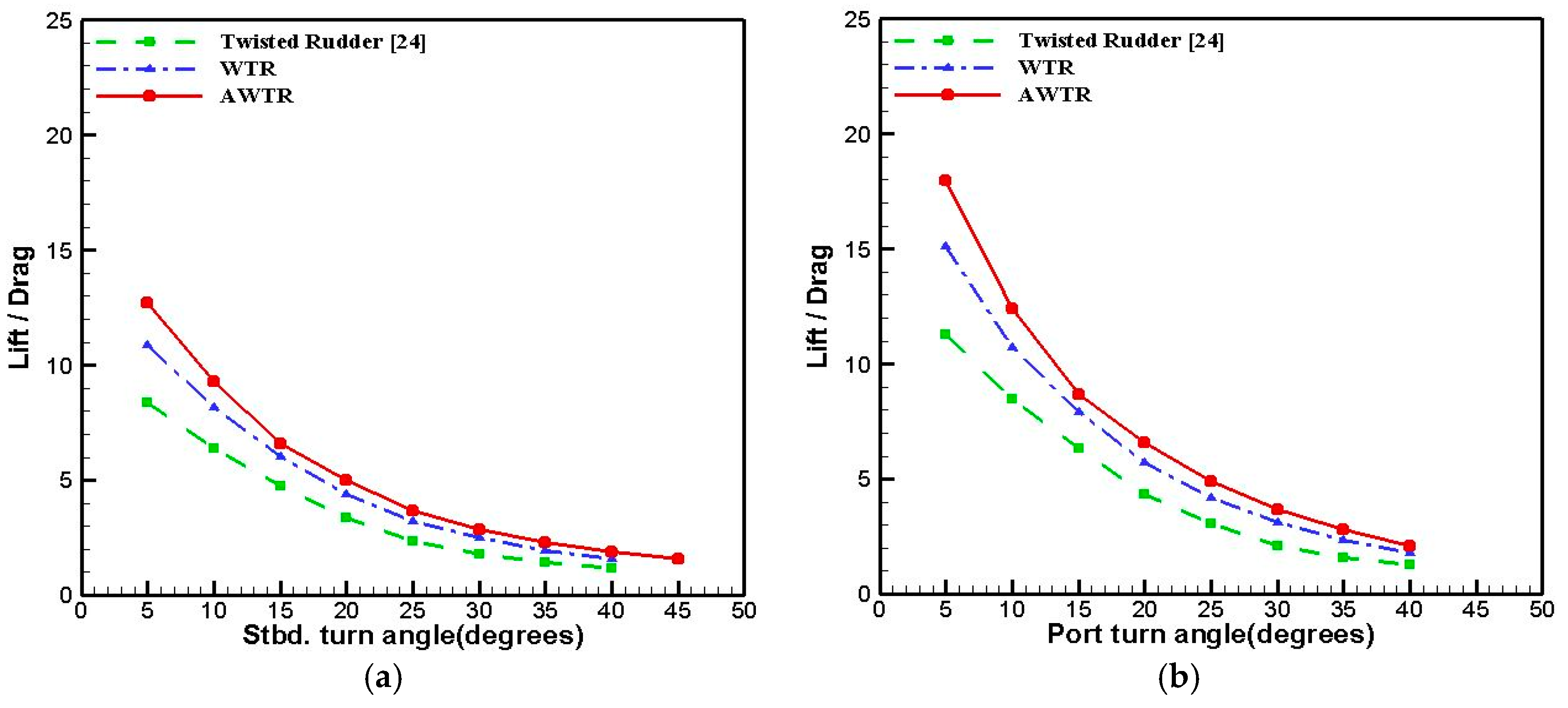
- The proposed AWTR was superior to the WTR and had the advantages of a high lift-to-drag ratio and normal force and drag, especially in the high-rudder-angle range.
- (4)
- The numerical computations were compared with the experimental results. Although discrepancies did exist between them, the trends in both methods were qualitatively consistent.
- (5)
- A simulation of the actual maneuverability of the ship (zig-zag, turning circle, stopping) equipped with the developed AWTR will be conducted in the near future.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| Symbol | Title | Definition | Unit |
| AWTR | Aligned wavy twisted rudder | ||
| WTR | Wavy twisted rudder | ||
| TR | Twisted rudder | ||
| LPP | Length between perpendiculars | m | |
| LWL | Length of waterline | m | |
| T | Draught | m | |
| AE/AO | Expanded area ratio of propeller | ||
| C | Chord length of propeller | m | |
| D | Propeller diameter of propeller | m | |
| R | Propeller radius | m | |
| P/D | Pitch-to-diameter ratio of propeller | ||
| S | Span length of rudder | mm | |
| Distance from top chord to center of propeller | mm | ||
| L | Rudder lift | ||
| D | Rudder drag | ||
| Normal force of rudder | |||
| Revolutions per seconds | |||
| Inflow | |||
| Angle of attack | |||
| subscript M, m | Value for model ship or model propeller | ||
| subscript S, s | Value for full-scale ship or full-scale propeller | Ds/Dm |
References
- Olson, C.R. Effects of Various Linkage Ratios on the Free-Stream Hydrodynamic Characteristics of an All-Movable Flapped Rudder; David, W. Taylor Model Basin: Washington, DC, USA, 1995. [Google Scholar]
- Kerwin, J.E.; Lewis, S.D.; Oppenheim, B.W. Experiments on Rudders with Small Flaps in Free-Stream and Behind a Propeller; Massachusetts Institute of Technology: Cambridge, MA, USA, 1974. [Google Scholar]
- Oppenheim, B.W. A Theoretical and Experimental Investigation of the Performance of Flapped Rudders. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 1974. [Google Scholar]
- Gim, O.S.; Lee, G.W.; Ahn, Y.K. Control Effect of Hydro-Kinetic Force of a Special Rudder Attached Flap. J. Navig. Port Res. 2008, 32, 771–776. [Google Scholar] [CrossRef]
- Kim, H.J.; Kim, S.H.; Kim, D.Y.; Kim, I.T.; Han, J.S. A Numerical Study on the Effects of Maneuverability of Ship with Low Forward Speed by Increasing Rudder Force. J. Soc. Nav. Archit. Korea 2016, 53, 217–227. [Google Scholar] [CrossRef][Green Version]
- Bertram, V. Practical Ship Hydrodynamic, 2nd ed.; Elsevier Butterworth-Heinemann: Oxford, UK, 2012; p. 284. [Google Scholar]
- Jun, H.C.; Kim, S.H.; Kim, H.J.; Park, H.P. Experimental Study on the Effect of Increasing Rudder Force on Turning Ability of Short Sea Shipping Ship. J. Korean Soc. Mar. Environ. Saf. 2012, 18, 591–596. [Google Scholar] [CrossRef]
- An, Y.S.; Lee, H.G.; Park, B.S.; Jang, C.S. Maneuverability of a DWT 8,000-Ton Oil/Chemical Tanker by Real Sea Trials-A Comparison between the Semi-Balanced Rudder and the Flap Rudder. J. Korean Soc. Fish. Ocean. Technol. 2015, 51, 257–264. [Google Scholar] [CrossRef]
- Liu, J.; Hekkenberg, R.; Zhao, B. RANS Study on Hydrodynamic Characteristics of Flapped Rudders. In International Conference on Offshore Mechanics and Arctic Engineering; American Society of Mechanical Engineers: New York, NY, USA, 2018; Volume 51333, p. V11BT12A002. [Google Scholar]
- Shin, Y.J.; Kim, M.C.; Lee, J.H.; Song, M.S. A Numerical and Experimental Study on the Performance of a Twisted Rudder with Wavy Configuration. Int. J. Nav. Archit. Ocean. Eng. 2019, 11, 131–142. [Google Scholar] [CrossRef]
- Tae, H.J.; Shin, Y.J.; Kim, B.J.; Kim, M.C. A Numerical Performance Study on Rudder with Wavy Configuration at High Angles of Attack. J. Soc. Nav. Archit. Korea 2017, 54, 18–25. [Google Scholar] [CrossRef][Green Version]
- Wei, Z.; New, T.H.; Cui, Y.D. An Experimental Study on Flow Separation Control of Hydrofoils with Leading-Edge Tubercles at Low Reynolds Number. Ocean Eng. 2015, 108, 336–349. [Google Scholar] [CrossRef]
- Fish, F.E.; Weber, P.W.; Murray, M.M.; Howle, L.E. The Tubercles on Humpback Whales' Flippers: Application of Bio-Inspired Technology. Integr. Comp. Biol. 2011, 51, 203–213. [Google Scholar] [CrossRef] [PubMed]
- Lin, Y.F.; Lam, K.; Zou, L.; Liu, Y. Numerical Study of Flows Past Airfoils with Wavy Surfaces. J. Fluids Struct. 2013, 36, 136–148. [Google Scholar] [CrossRef]
- Serson, D.; Meneghini, J.R. Numerical Study of Wings with Wavy Leading and Trailing Edges. Procedia Iutam 2015, 14, 563–569. [Google Scholar] [CrossRef]
- Skillen, A.; Revell, A.; Pinelli, A.; Piomelli, U.; Favier, J. Flow Over a Wing with Leading-Edge Undulations. AIAA J. 2015, 53, 464–472. [Google Scholar] [CrossRef]
- Jones, W.P.; Launder, B.E. The Prediction of Laminarization with a Two-Equation Model of Turbulence. Int. J. Heat Mass Transf. 1972, 15, 301–314. [Google Scholar] [CrossRef]
- Launder, B.E.; Sharma, B.I. Application of the Energy-Dissipation Model of Turbulence to the Calculation of Flow Near a Spinning Disc. Lett. Heat Mass Transf. 1974, 1, 131–137. [Google Scholar] [CrossRef]
- Shih, T.H.; Liou, W.W.; Shabbir, A.; Yang, Z.; Zhu, J. A New k-ϵ Eddy Viscosity Model for High Reynolds Number Turbulent Flows-Model Development and Validation. Comput. Fluids 1995, 24, 227–238. [Google Scholar] [CrossRef]
- Rodi, W. Experience with Two-Layer Models Combining the k-Epsilon Model with a One-Equation Model Near the Wall. In 29th Aerospace Sciences Meeting; AIAA ARC: Reston, VA, USA, 1991; p. 216. [Google Scholar]
- Simens. STAR CCM+ User Guide, Version 15.02.
- Muzaferija, S.; Peric, M. Computation of Free Surface Flows using Interface Tracking and Interface Capturing Methods. In Nonlinear Water Wave Interaction; Mahrenholtz, O., Markewicz, M., Eds.; WIT Press: Southampton, UK, 1999. [Google Scholar]
- Park, I.R.; Kim, K.S.; Kim, J.; Van, S.H. Numerical Simulation of Free Surface Flow Using a Refined HRIC VOF Method. J. Soc. Nav. Archit. Korea 2010, 47, 279–290. [Google Scholar] [CrossRef][Green Version]
- Casalone, P.; Dell’Edera, O.; Fenu, B.; Giorgi, G.; Sirigu, S.A.; Mattiazzo, G. Unsteady RANS CFD Simulations of Sailboat’s Hull and Comparison with Full-Scale Test. J. Mar. Sci. Eng. 2020, 8, 394. [Google Scholar] [CrossRef]
- Shin, Y.J. A Study on the Analysis of Interactions and Optimal Design of Energy Saving Devices by Ship Types. Ph.D. Thesis, Pusan National University, Busan, Korea, 2019. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Real Ship | Model Ship | |
|---|---|---|
| Length PP (m) | 230.00 | 5.82 |
| Length WL (m) | 232.50 | 5.89 |
| Breadth (m) | 32.20 | 0.82 |
| Depth (m) | 19.00 | 0.48 |
| Design draught (m) | 10.80 | 0.27 |
| Block coefficient | 0.651 | 0.651 |
| Design speed (m/s) | 12.346 m/s | 1.964 m/s |
| Froude number | 0.259 | |
| Scale ratio | 39.5 | |
| Real Ship | Model Ship | |
|---|---|---|
| Diameter (m) | 7.90 | 0.2 |
| Number of blades | 5 | |
| (P/D) mean | 0.950 | |
| / | 0.800 | |
| Skew (°) | 32 | |
| Hub ratio | 0.180 | |
| Section profile | NACA66 (a = 0.8 mean line camber) | |
| Scale ratio | 39.5 | |
| Wavy Twisted Rudder | Aligned Wavy Twisted Rudder | |
|---|---|---|
| Profile type | NACA 0018 | |
| Top chord (mm) | 152.32 | 154.59 |
| Bottom chord (mm) | 120.10 | 122.43 |
| Mean chord (mm) | 136.21 | 138.51 |
| Span (mm) | 248.50 | 251.71 |
| Aspect ratio | 1.82 | 1.82 |
| Resistance | Self-Propulsion | Rudder Force | |
|---|---|---|---|
| Governing equation | RANS | ||
| Velocity–pressure coupling | SIMPLE method | ||
| Turbulence model | K-ε turbulence model | ||
| Flow | Unsteady | ||
| Body motion | DFBI (Dynamic Fluid–Body Interaction motion) | n/a | |
| Rotating motion | n/a | RBM method (sliding mesh) | |
| Time step | 0.002 s | 5° rotation of propeller | |
| Total physical time | 30 s | 200 revolutions of the propeller (approximately 19 s) | |
| Inlet/Bottom/Top | Velocity inlet with defined volume fraction, flow speed = 1.964 m/s, turbulence intensity 0.01, viscosity ratio 10 |
| Outlet | Pressure outlet with relative pressure = hydrostatic pressure |
| Side | Wall with slip condition |
| Hull | Wall with no slip condition |
| Resistance | Self-Propulsion | Rudder Force | |
|---|---|---|---|
| Fluid region minimum mesh size | 0.005625 m | ||
| Propeller region minimum mesh size | n/a | 0.0014062 5 m | |
| Fluid region no. of grids | 2.50 × 106 | 2.85 × 106 | |
| Propeller region no. of grids | n/a | 3.20 × 105 | |
| Total no. of grids | 2.50 × 106 | 3.17 × 106 | |
| Test Case | Measurement Speed Range (Knots) | Draught Condition | Appendage |
|---|---|---|---|
| Resistance | 23, 24, 25 | Design draught | WTR, AWTR |
| Self-propulsion | 23, 24, 25 | Design draught | WTR, AWTR |
| Rudder force | 24 | Design draught | WTR, AWTR |
| Knots | Case | Diff. (%) | ||
|---|---|---|---|---|
| 23 | Model test | 3.610 | 3.616 | 0.16 |
| 24 | Model test | 3.894 | 3.900 | 0.15 |
| CFD | 3.857 | 3.864 | 0.18 | |
| Diff. (%) | 0.96 | 0.85 | - | |
| 25 | Model test | 4.257 | 4.264 | 0.16 |
| Knots | Case | nM (RPS) | QM (Nm) | 2πnMQM (W) | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| WTR | AWTR | Diff. (%) | WTR | AWTR | Diff. (%) | WTR | AWTR | Diff. (%) | ||
| 23 | Model test | 10.334 | 10.314 | −0.19 | 1.048 | 1.047 | −0.10 | 68.047 | 67.851 | −0.29 |
| 24 | Model test | 10.882 | 10.875 | −0.09 | 1.166 | 1.163 | −0.26 | 79.724 | 79.445 | −0.35 |
| CFD | 10.866 | 10.831 | −0.32 | 1.182 | 1.182 | 0.00 | 80.699 | 80.439 | −0.32 | |
| Diff. (%) | 0.147 | 0.379 | - | −1.354 | −1.607 | - | −1.235 | −1.235 | - | |
| 25 | Model test | 11.480 | 11.453 | −0.24 | 1.290 | 1.289 | −0.08 | 93.049 | 92.758 | −0.31 |
| Rudder | Starboard Turn Angle Range | Portside Turn Angle Range | Model Ship Speed (m/s) |
|---|---|---|---|
| Twisted rudder | 5–40°, every 5° | 5–40°, every 5° | 1.964 |
| Wavy twisted rudder (WTR) | 5–40°, every 5° | 5–40°, every 5° | |
| Aligned wavy twisted rudder (AWTR) | 5–45°, every 5° | 5–40°, every 5° |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shin, Y.-J.; Kim, M.-C.; Kang, J.-G.; Kim, J.-W. Performance Improvement in a Wavy Twisted Rudder by Alignment of the Wave Peak. Appl. Sci. 2021, 11, 9634. https://doi.org/10.3390/app11209634
Shin Y-J, Kim M-C, Kang J-G, Kim J-W. Performance Improvement in a Wavy Twisted Rudder by Alignment of the Wave Peak. Applied Sciences. 2021; 11(20):9634. https://doi.org/10.3390/app11209634
Chicago/Turabian StyleShin, Yong-Jin, Moon-Chan Kim, Jin-Gu Kang, and Jin-Wook Kim. 2021. "Performance Improvement in a Wavy Twisted Rudder by Alignment of the Wave Peak" Applied Sciences 11, no. 20: 9634. https://doi.org/10.3390/app11209634
APA StyleShin, Y.-J., Kim, M.-C., Kang, J.-G., & Kim, J.-W. (2021). Performance Improvement in a Wavy Twisted Rudder by Alignment of the Wave Peak. Applied Sciences, 11(20), 9634. https://doi.org/10.3390/app11209634