Evaluation of a Passive Upper-Limb Exoskeleton Applied to Assist Farming Activities in Fruit Orchards


Abstract
1. Introduction
2. Materials and Methods
2.1. Experimental Design
- In the laboratory: Two common arm-lifting movements were simulated (fruit thinning and pesticide spraying) in the laboratory, and the participants were divided into groups A (25–40 yr.) and B (41–64 yr.) to compare the PULE effect in different age groups. Because this test was the first evaluation of the PULE, for safety reasons, the test movements were limited to simple short-term lifting exercises of the arms. The independent variables were the ages of groups A and B, two types of arm-related activities, namely, fruit thinning and pesticide spraying, and the use of the PULE (with PULE: ES, without PULE: W-ES). In this experimental design, the main muscle used to lift the upper limb and perform internal rotation was the AD muscle. Therefore, we measured electromyography (EMG) signals only for the AD. The dependent variables were the EMG of the AD, the lifting angle of the upper limb (θ), and the ratings of perceived exertion (RPE) of the upper limb. Additionally, the local perceived pressure (LPP) was rated for the ES condition. The experiment considered four conditions (the lifting movements of the fruit thinning and pesticide spraying activities, W-ES, and ES), which were implemented by each participant. Two forms of arm activity (fruit thinning and pesticide spraying) were selected, as they are commonly performed during orchard farming.
- In the orchard: After confirming that the PULE can effectively and safely assist arm lifting in the laboratory, the farmers then performed the real operation of pesticide spraying for the pomelo tree and fruit thinning for the jujube tree. The independent variables were the use of the PULE (with PULE: ES, without PULE: W-ES). The dependent variables were the RPE of the upper limb and the EMG of the AD, lateral deltoid (LD), and posterior deltoid (PD). Additionally, the LPP was rated for the ES condition. In this experimental design, pesticide spraying and fruit thinning are continuous complicated actions that include internal rotation, abduction, and external rotation. The main muscles used to lift the upper limbs and undergo internal rotation, abduction, and external rotation were the AD, LD, and PD. Therefore, we measured the EMG signals for the AD, LD, and PD.
2.2. Experimental Procedures
- In the laboratory: The participants were briefed about the experimental procedures and equipment when they entered the laboratory. Subsequently, EMG electrodes were placed over the AD of the participants. Following a detailed demonstration and explanation by the researchers, the participants practiced the relevant movements until they became proficient. The participants were allowed to rest for five minutes between each step to avoid fatigue. The experiment involved the following steps:
- In the orchard: The pomelo farmers and jujube farmers were briefed about the experimental procedures and equipment when they entered the orchards. Subsequently, EMG electrodes were placed over the AD, LD, and PD of the farmers after a systematic demonstration and clarification by the researchers. The experiment in the orchard involved the following steps:
2.3. Participants and Ethics Approval
- In the orchard: Group C consisted of four male participants whose task was to spray pesticide on the pomelo tree. Group D consisted of three male participants and one female participant whose task was to perform fruit thinning for the jujube tree. To initiate the experiment, permission was obtained from all participants. The average and standard deviation (SD) for groups A, B, C, and D in terms of age, weight, and height are listed in Table 1. None of the participants had any musculoskeletal disorders. The Ethics Committee of Kaohsiung Veterans General Hospital approved the experimental design, and the IRB No. is KSVGH20-CT6-10.
2.4. Equipment
2.4.1. Exoskeleton
2.4.2. Surface EMG
2.4.3. Qualisys Motion Capture System
2.4.4. Perceived Exertion
2.4.5. The Torque Measurement
2.4.6. Data Analysis
3. Results
3.1. Muscle Activity
3.2. Kinematics
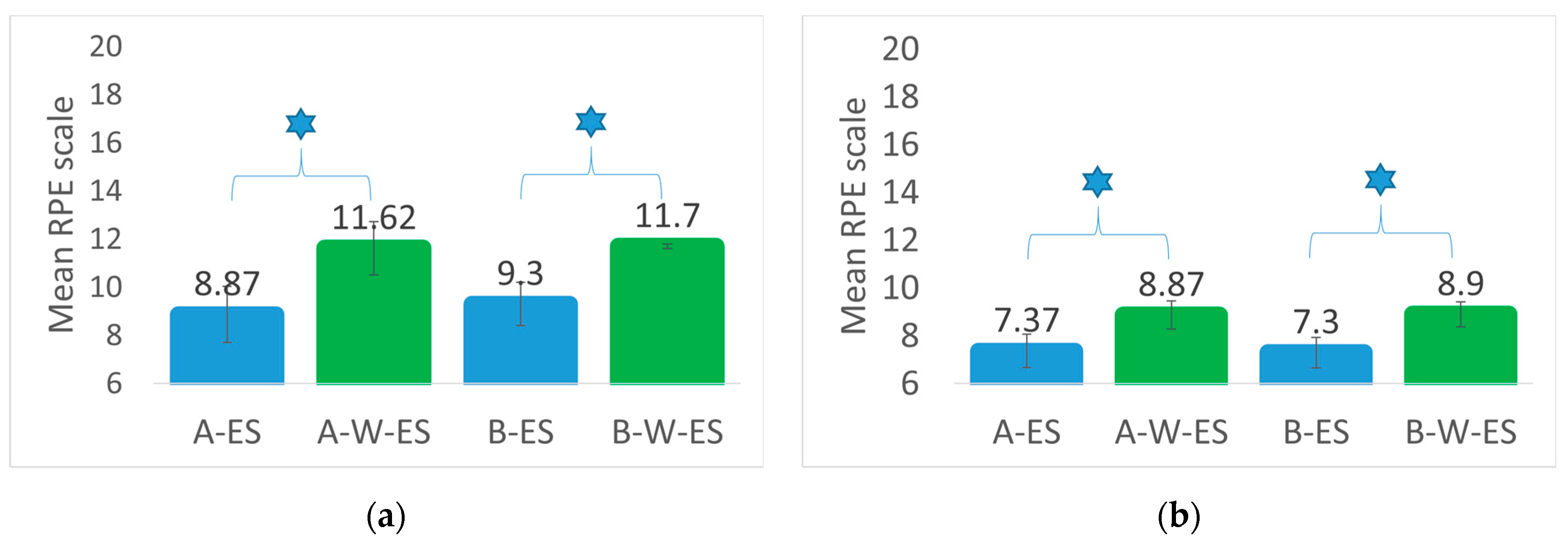
3.3. Borg 6–20 RPE Scale
3.4. LPP Scale
3.5. The Torque Measurement
4. Discussion
4.1. Muscle Activity
4.2. Kinematics and Perceived Exertion
4.3. The Torque Measurement
4.4. Limitations
5. Conclusions
6. Patents
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Survey Results of Income of Main Farmers in 2015. Available online: https://www.coa.gov.tw/ws.php?id=2505701 (accessed on 10 September 2020).
- The Most Important Workers in Farming and Animal Husbandry Are Classified by Gender and Age. Available online: https://www.stat.gov.tw/ct.asp?xItem=37583&CtNode=5017&mp=4 (accessed on 9 September 2020).
- Announcement Information of Kaohsiung District Agricultural Research and Extension Station. Available online: https://www.kdais.gov.tw/theme_data.php?theme=news&sub_theme=announcement&id=7525 (accessed on 11 September 2020).
- Shin, S.-J.; Yoo, W.-G.; Kim, T.-Y. Effects of different overhead work conditions on the neck and shoulder muscles. J. Phys. Ther. 2012, 24, 197–199. [Google Scholar] [CrossRef]
- Davis, K.G.; Kotowski, S.E. Understanding the ergonomic risk for musculoskeletal disorders in the United States agricultural sector. Am. J. Ind. Med. 2007, 50, 501–511. [Google Scholar] [CrossRef] [PubMed]
- Meyers, J.M.; A Miles, J.; Faucett, J.; Janowitz, I.; Tejeda, D.G.; Weber, E.; Smith, R.; Garcia, L. Priority Risk Factors for Back Injury in Agricultural Field Work. J. Agromed. 2002, 8, 39–54. [Google Scholar] [CrossRef]
- Bernard, C.; Tourne, M. Musculoskeletal disorders in agriculture. La Revue du Praticien 2007, 57, 45–50. [Google Scholar] [PubMed]
- Parent-Thirion, A.; Biletta, I.; Cabrita, J.; Vargas, O.; Vermeylen, G.; Wilczynska, A.; Wilkens, M. Book Eurofound: Sixth European Working Conditions Survey—Overview Report (2017 Update); Office of the European Union: Luxembourg, 2017. [Google Scholar]
- Ng, D.; McNee, C.; Kieser, J.; Farella, M. Neck and shoulder muscle activity during standardized work-related postural tasks. Appl. Ergon. 2014, 45, 556–563. [Google Scholar] [CrossRef] [PubMed]
- da Costa, B.R.; Vieira, E.R. Risk factors for work-related musculoskeletal disorders: A systematic review of recent longitudinal studies. Am. J. Ind. Med. 2009, 53, 285–323. [Google Scholar] [CrossRef]
- Jaffar, N.; Abdul-Tharim, A.H.; Mohd-Kamar, I.F.; Lop, N.S. A literature review of ergonomics risk factors in construction industry. In Proceedings of the 2nd International Building Control Conference, Penang, Malaysia, 11–12 July 2011; pp. 89–97. [Google Scholar]
- De Looze, M.P.; Bosch, T.; Krause, F.; Stadler, K.S.; O’Sullivan, L.W. Exoskeletons for industrial application and their potential effects on physical work load. Ergonomics 2016, 59, 671–681. [Google Scholar] [CrossRef]
- Matthew, R.P.; Mica, E.J.; Meinhold, W.; Loeza, J.A.; Tomizuka, M.; Bajcsy, R. Introduction and initial exploration of an active/passive exoskeleton framework for portable assistance. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 5351–5356. [Google Scholar]
- Romero, D.; Stahre, J.; Wuest, T.; Noran, O.; Bernus, P.; Fast-Berglund, Å.; Gorecky, D. Towards an operator 4.0 typology: A human-centric perspective on the fourth industrial revolution technologies. In Proceedings of the international Conference on Computers and industrial Engineering (CIE46), Tianjin, China, 29–31 October 2016; pp. 29–31. [Google Scholar]
- Spada, S.; Ghibaudo, L.; Gilotta, S.; Gastaldi, L.; Cavatorta, M.P. Investigation into the Applicability of a Passive Upper-limb Exoskeleton in Automotive Industry. In Proceedings of the 27th International Conference on Flexible Automation and Intelligent Manufacturing, Modena, Italy, 27–30 June 2017; pp. 1255–1262. [Google Scholar]
- Theurel, J.; Desbrosses, K.; Roux, T.; Savescu, A. Physiological consequences of using an upper limb exoskeleton during manual handling tasks. Appl. Ergon. 2018, 67, 211–217. [Google Scholar] [CrossRef]
- Huysamen, K.; Bosch, T.; Looze Md Stadler, K.S.; Graf, E.; O’Sullivan, L.W. Evaluation of a passive exoskeleton for static upper limb activities. Appl. Ergon. 2018, 70, 148–155. [Google Scholar] [CrossRef]
- Omoniyi, A.; Trask, C.; Milosavljevic, S.; Thamsuwan, O. Farmers’ perceptions of exoskeleton use on farms: Finding the right tool for the work (er). Int. J. Ind. Ergon. 2020, 80, 103036. [Google Scholar] [CrossRef]
- Wei, W.; Wang, W.; Qu, Z.; Gu, J.; Lin, X.; Yue, C. The effects of a passive exoskeleton on muscle activity and metabolic cost of energy. Adv. Robot. 2020, 34, 19–27. [Google Scholar] [CrossRef]
- Ippolito, D.; Constantinescu, C.; Rusu, C.A. Enhancement of human-centered workplace design and optimization with Exoskeleton technology. Procedia CIRP 2020, 91, 243–248. [Google Scholar] [CrossRef]
- Thamsuwan, O.; Milosavljevic, S.; Srinivasan, D.; Trask, C. Potential exoskeleton uses for reducing low back muscular activity during farm tasks. Am. J. Ind. Med. 2020, 63, 1017–1028. [Google Scholar] [CrossRef]
- Patent Announcement of People’s Republic of China. Available online: https://twpat3.tipo.gov.tw/tipotwoc/tipotwkm?@@175412089 (accessed on 15 September 2020).
- Hermens, H.J.; Freriks, B.; Disselhorst-Klug, C.; Rau, G. Development of recommendations for SEMG sensors and sensor placement procedures. J. Electromyogr. Kinesiol. 2000, 10, 361–374. [Google Scholar] [CrossRef]
- Altenburger, R.; Scherly, D.; Stadler, K.S. Design of a passive, iso-elastic upper limb exoskeleton for gravity compensation. Robomech. J. 2016, 3, 12. [Google Scholar] [CrossRef]
- De Luca, C.J. The use of surface electromyography in biomechanics. J. Appl. Biomech. 1997, 13, 135–163. [Google Scholar] [CrossRef]
- Rau, G.; Schulte, E.; Disselhorst-Klug, C. From cell to movement: To what answers does EMG really contribute? J. Electromyogr. Kinesiol. 2004, 14, 611–617. [Google Scholar] [CrossRef] [PubMed]
- Gallo, L.; Salis Gross, S.; Palla, S. Nocturnal masseter EMG activity of healthy subjects in a natural environment. J. Dent. Res. 1999, 78, 1436–1444. [Google Scholar] [CrossRef] [PubMed]
- Borg, G. Borg’s Perceived Exertion and Pain Scales; Human Kinetics: Champaign, IL, USA, 1998. [Google Scholar]
- Van der Grinten, M.P.; Smitt, P. Development of a practical method for measuring body part discomfort. Adv. Ind. Ergon. Saf. 1992, 4, 311–318. [Google Scholar]
- Huysamen, K.; de Looze, M.; Bosch, T.; Ortiz, J.; Toxiri, S.; O’Sullivan, L.W. Assessment of an active industrial exoskeleton to aid dynamic lifting and lowering manual handling tasks. Appl. Ergon. 2018, 68, 125–131. [Google Scholar] [CrossRef]
- Hoyos Rodriguez, D. Realistic Computer Aided Design: Model of an Exoskeleton. Master’s Thesis, University of Skövde, School of Engineering Science, Skövde, Sweden, 2019. [Google Scholar]
- A Brief Introduction to the Development and Current Situation of Japanese Fruit Cultivation Machinery. Available online: https://www.coa.gov.tw/ws.php?id=2508271 (accessed on 11 September 2020).
- Hamberg-van Reenen, H.H.; Van Der Beek, A.J.; Blatter, B.M.; Van Der Grinten, M.P.; Van Mechelen, W.; Bongers, P.M. Does musculoskeletal discomfort at work predict future musculoskeletal pain? J. Ergon. 2008, 51, 637–648. [Google Scholar] [CrossRef] [PubMed]
- The Characteristics of Human Limbs in Taiwan. Available online: https://www.ilosh.gov.tw/menu/1188/1201/ (accessed on 9 September 2020).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Participants | Age (y) | Weight (kg) | Height (mm) |
|---|---|---|---|
| Group A | 30.3 ± 5.38 | 70.0 ± 9.77 | 1707.5 ± 2.38 |
| Group B | 50.3 ± 9.02 | 78.4 ± 11.69 | 1668.0 ± 4.97 |
| Group C | 50.5 ± 6.38 | 76.0 ± 16.89 | 1702.5 ± 4.81 |
| Group D | 53.0 ± 11.97 | 73.0 ± 9.61 | 1660.0 ± 5.04 |
| Analysis | Independent Variable | Dependent Variable |
|---|---|---|
| 1 | A_W-ES_ thinning vs. A_ ES_ thinning | %Maximum voluntary contractions (%MVC) |
| 2 | A_W-ES_ spraying vs. A_ ES_ spraying | |
| 3 | B_W-ES_ thinning vs. B_ ES_ thinning | |
| 4 | B_W-ES_ spraying vs. B_ ES_ spraying | |
| 5 | A_W-ES_ thinning vs. A_ ES_ thinning | Ratings of perceived exertion (RPE) |
| 6 | A_W-ES_ spraying vs. A_ ES_ spraying | |
| 7 | B_W-ES_ thinning vs. B_ES_ thinning | |
| 8 | B_W-ES_ spraying vs. B_ ES_ spraying | |
| 9 | W-ES_ thinning vs. ES_ thinning | Lifting angle of the upper limb (θ) |
| 10 | W-ES_ spraying vs. ES_ spraying |
| Time | PULE | Mean ± SD | α Value |
|---|---|---|---|
| 0–10 (s) | ES | 100.88 ± 4.38 | 0.844 |
| W-ES | 101.23 ± 3.99 | ||
| 45–55 (s) | ES | 99.73 ± 4.71 | 0.899 |
| W-ES | 99.98 ± 4.29 | ||
| 80–90 (s) | ES | 98.95 ± 4.87 | 0.881 |
| W-ES | 98.87 ± 4.38 |
| Time | PULE | Mean ± SD | α Value |
|---|---|---|---|
| 0–10 (s) | ES | 101.68 ± 6.90 | 0.825 |
| W-ES | 101.77 ± 4.48 | ||
| 45–55 (s) | ES | 100.68 ± 7.01 | 0.6 |
| W-ES | 100.4 ± 4.08 | ||
| 80–90 (s) | ES | 100.19 ± 6.77 | 0.588 |
| W-ES | 99.73 ± 4.48 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, H.-M.; Le, D.K.L.; Lin, W.-C. Evaluation of a Passive Upper-Limb Exoskeleton Applied to Assist Farming Activities in Fruit Orchards. Appl. Sci. 2021, 11, 757. https://doi.org/10.3390/app11020757
Wang H-M, Le DKL, Lin W-C. Evaluation of a Passive Upper-Limb Exoskeleton Applied to Assist Farming Activities in Fruit Orchards. Applied Sciences. 2021; 11(2):757. https://doi.org/10.3390/app11020757
Chicago/Turabian StyleWang, Hsien-Min, Dang Khanh Linh Le, and Wei-Chih Lin. 2021. "Evaluation of a Passive Upper-Limb Exoskeleton Applied to Assist Farming Activities in Fruit Orchards" Applied Sciences 11, no. 2: 757. https://doi.org/10.3390/app11020757
APA StyleWang, H.-M., Le, D. K. L., & Lin, W.-C. (2021). Evaluation of a Passive Upper-Limb Exoskeleton Applied to Assist Farming Activities in Fruit Orchards. Applied Sciences, 11(2), 757. https://doi.org/10.3390/app11020757