An Adaptive Model Predictive Voltage Control for LC-Filtered Voltage Source Inverters




Abstract
1. Introduction
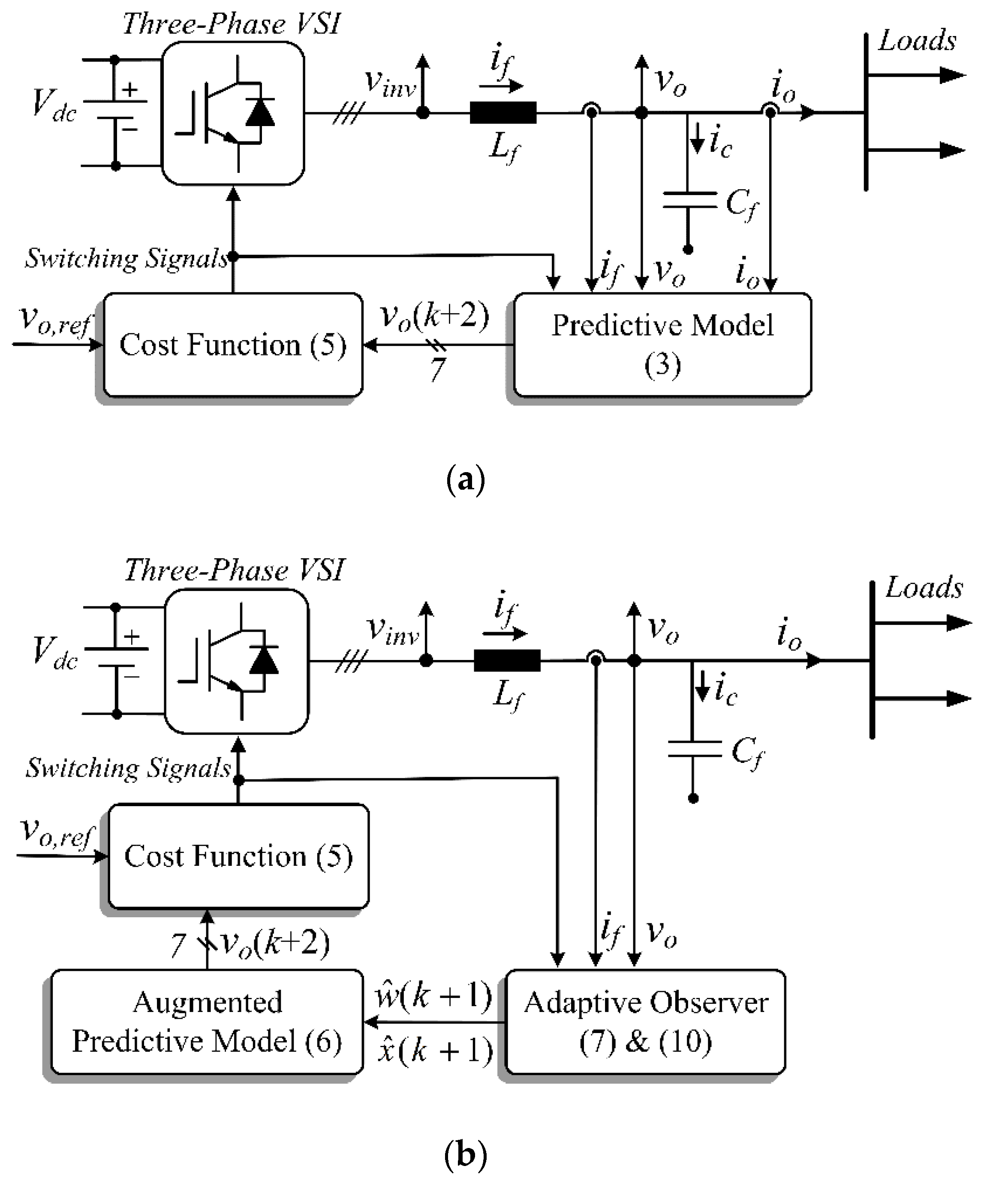
2. System Dynamics on an LC-Filtered VSI
3. Conventional Model Predictive Control (MPC)
4. Adaptive MPC
4.1. Augmented State-Space Model
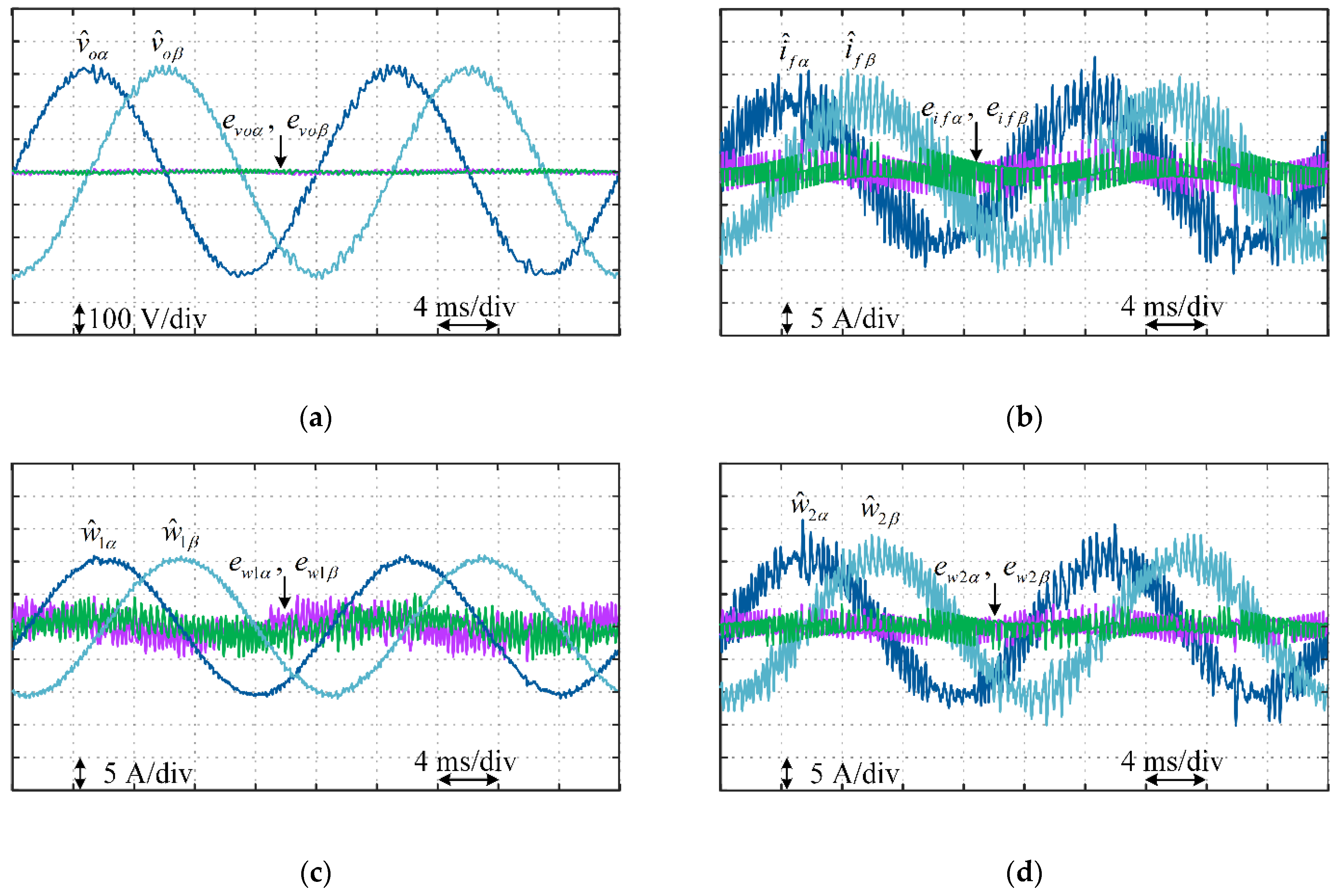
4.2. Adaptive Observer
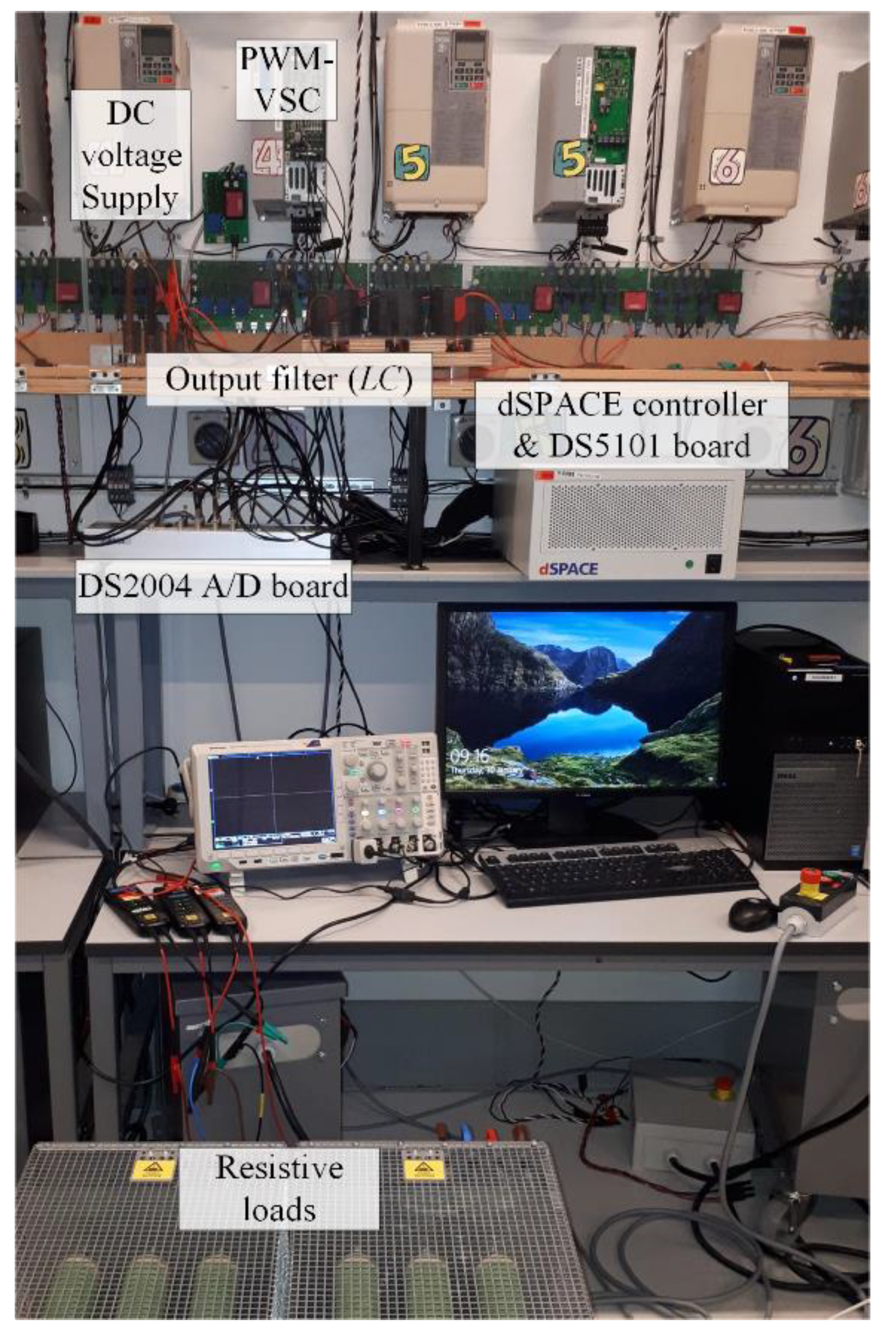
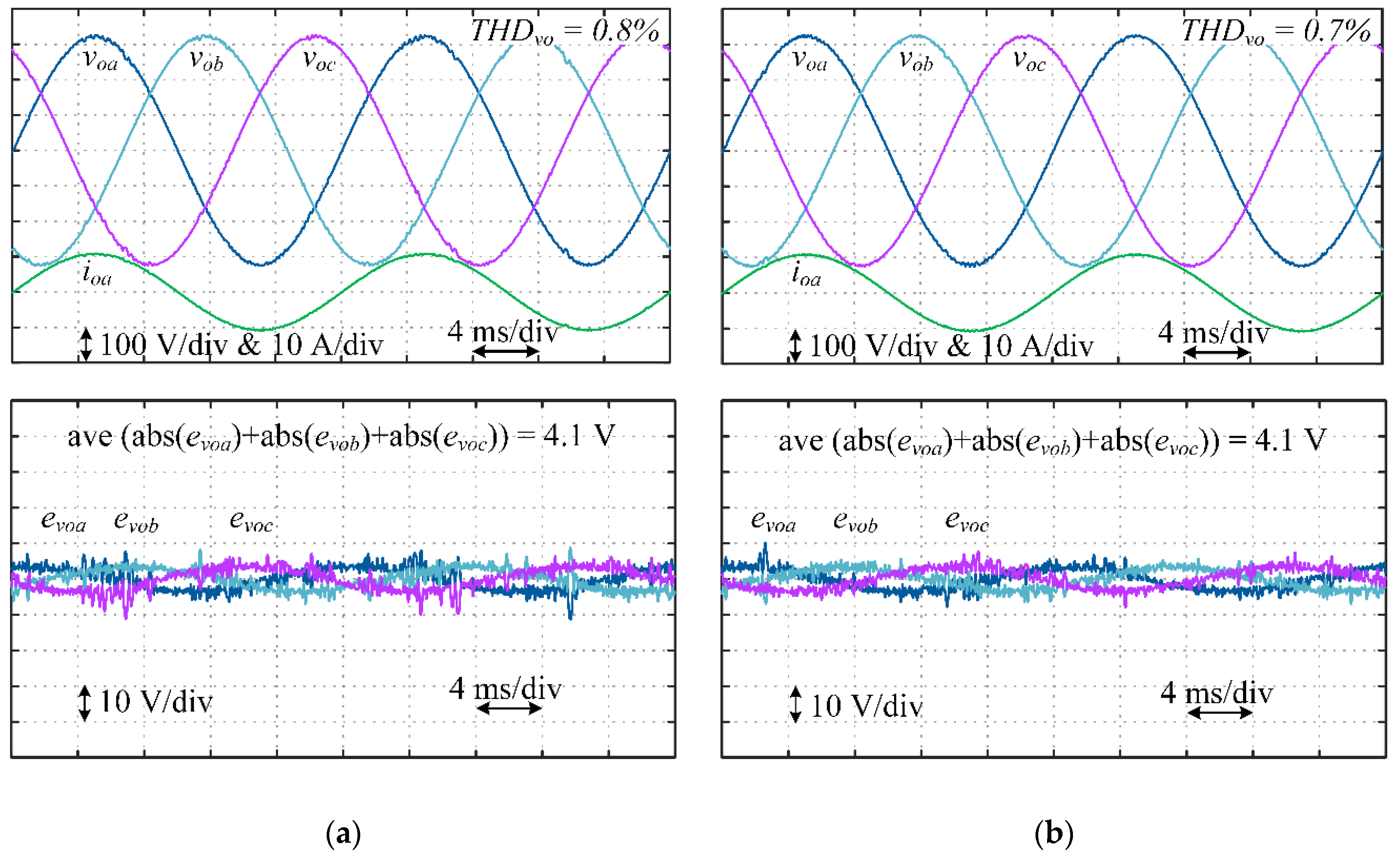
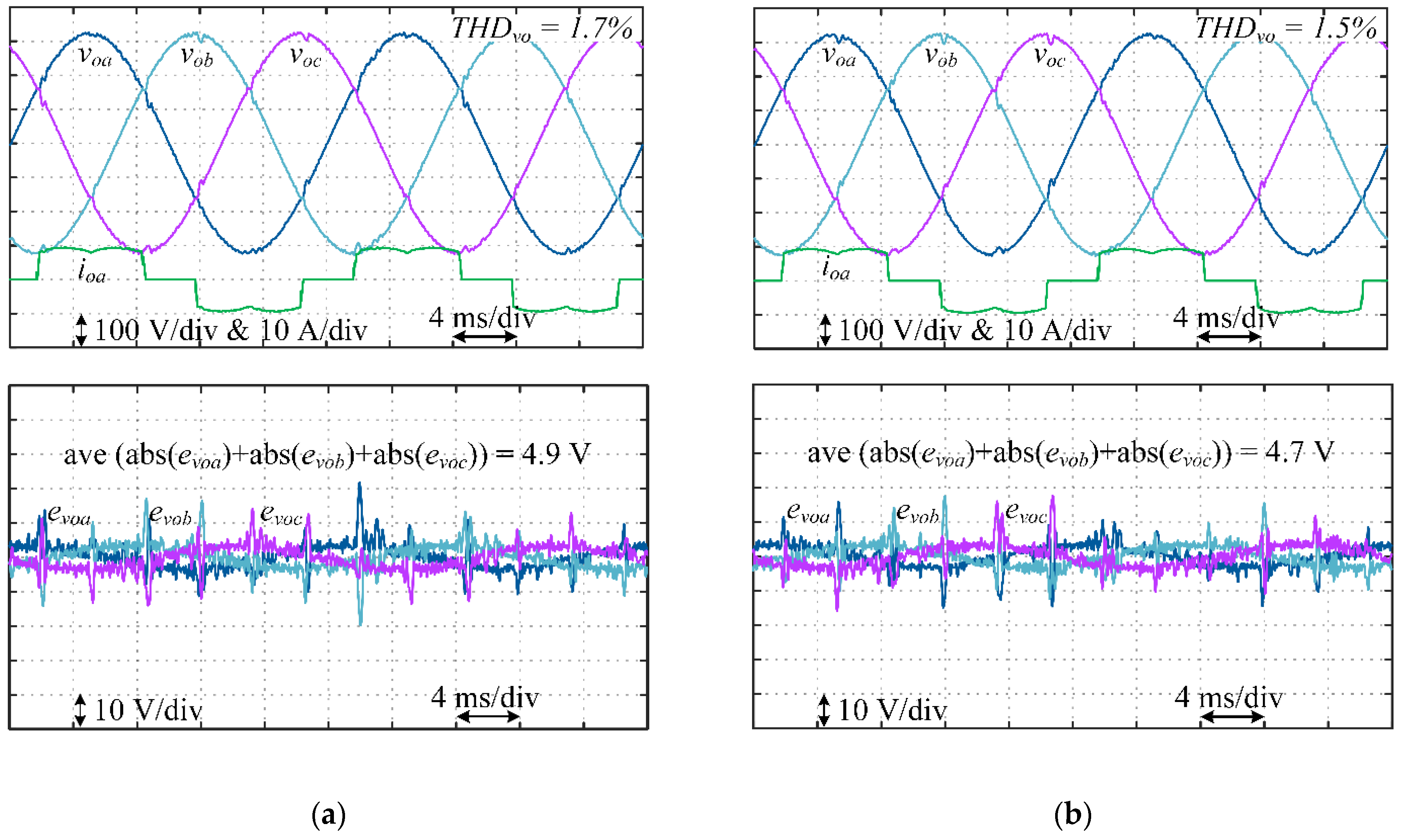
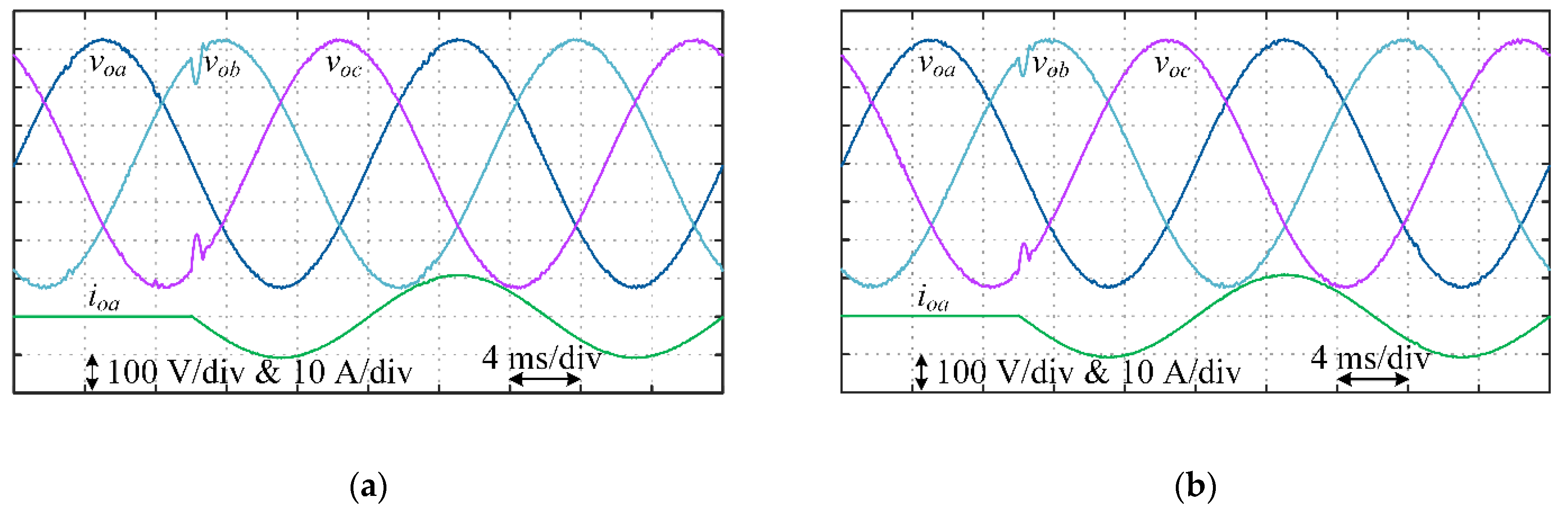
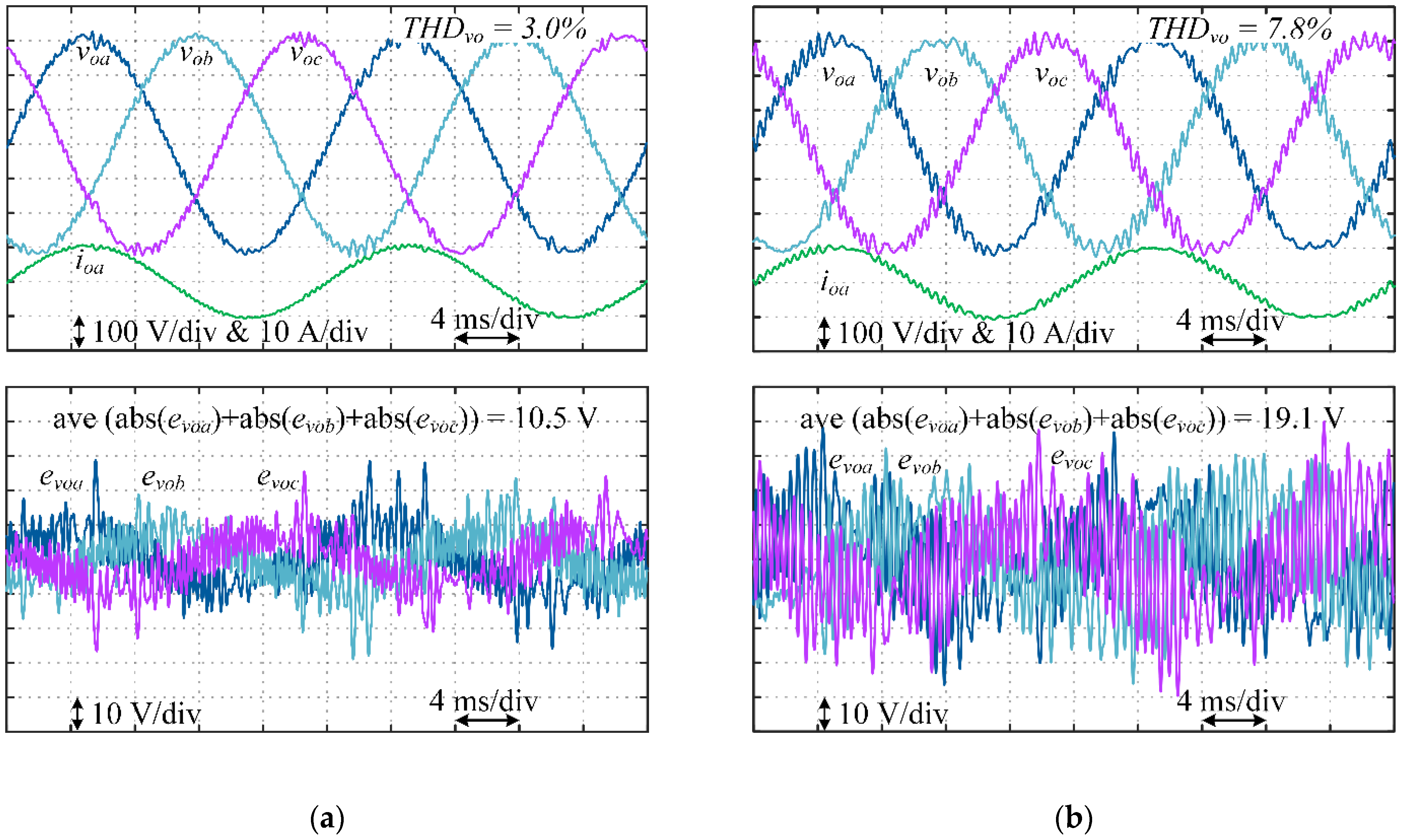
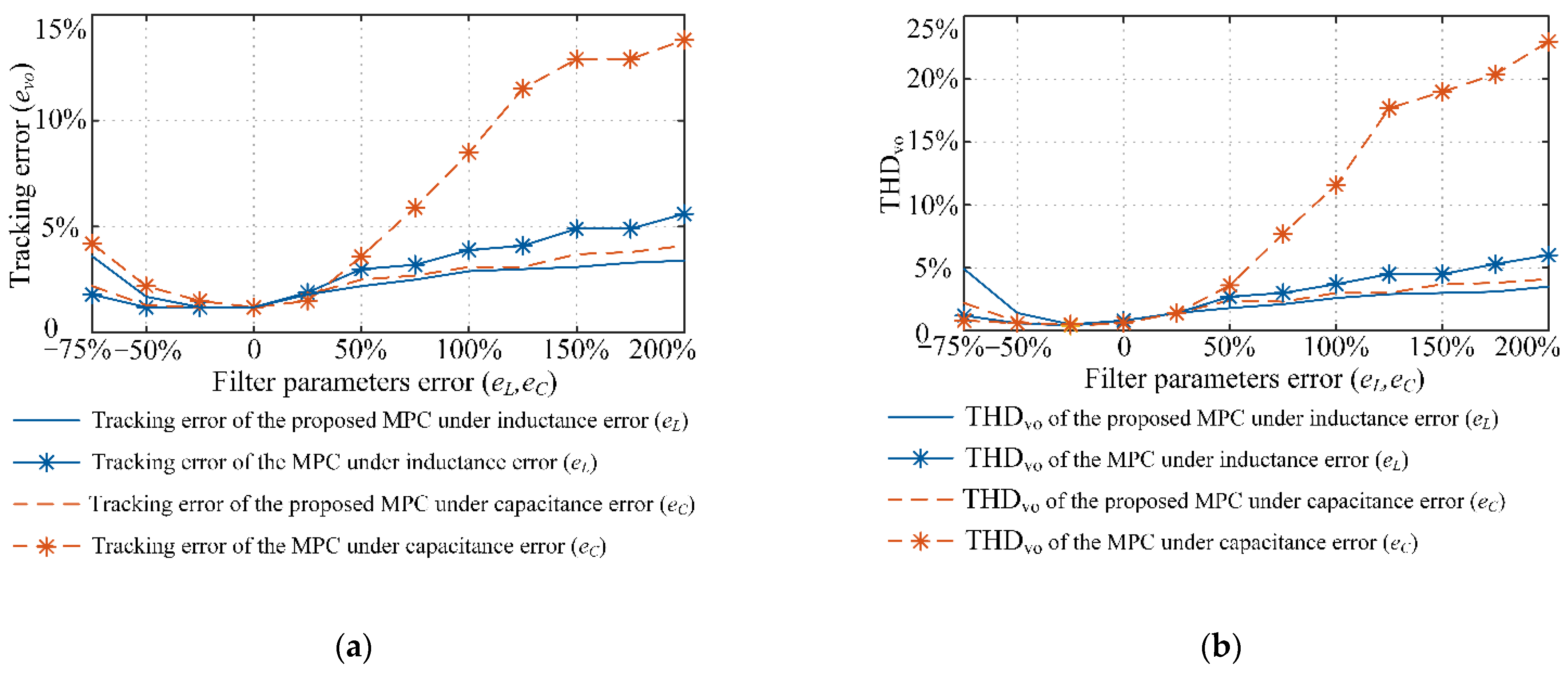
5. Simulation and Experimental Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| VSI | Voltage source inverter |
| LC | Inductor and capacitor filter |
| PI | Proportional-integral |
| PR | Proportional-resonant |
| MPC | Model predictive control |
| SMC | Sliding mode control |
| HC | Harmonic compensator |
| IAC | Indirect adaptive control |
| DAC | Direct adaptive control |
| PWM | Pulse-width modulation |
| THD | Total harmonic distortion |
References
- Zheng, C.; Dragicevic, T.; Blaabjerg, F. Current-Sensorless Finite-Set Model Predictive Control for LC-Filtered Voltage Source Inverters. IEEE Trans. Power Electron. 2019, 35, 1086–1095. [Google Scholar] [CrossRef]
- Heydari, R.; Dragicevic, T.; Blaabjerg, F. High-Bandwidth Secondary Voltage and Frequency Control of VSC-Based AC Microgrid. IEEE Trans. Power Electron. 2019, 34, 11320–11331. [Google Scholar] [CrossRef]
- Alhasheem, M.; Blaabjerg, F.; Mattavelli, P.; Davari, P. Model Predictive Control of Grid Forming Converters with Enhanced Power Quality. Appl. Sci. 2020, 10, 6390. [Google Scholar] [CrossRef]
- He, J.; Chok, Y.C.; Zhang, X.; Li, Z.; Liu, Z. An Adaptive Dual-Loop Lyapunov-Based Control Scheme for a Single-Phase UPS Inverter. IEEE Trans. Power Electron. 2020, 35, 8886–8891. [Google Scholar] [CrossRef]
- Zou, Z.X.; Buticchi, G.; Liserre, M. Grid Identification and Adaptive Voltage Control in a Smart Transformer-Fed Grid. IEEE Trans. Power Electron. 2019, 34, 2327–2338. [Google Scholar] [CrossRef]
- Liao, Y.; Wang, X.; Blaabjerg, F. Passivity-Based Analysis and Design of Linear Voltage Controllers for Voltage-Source Converters. IEEE Open J. Ind. Electron. Soc. 2020, 1, 114–126. [Google Scholar] [CrossRef]
- Han, Y.; Fang, X.; Yang, P.; Wang, C.; Xu, L.; Guerrero, J.M. Stability Analysis of Digital-Controlled Single-Phase Inverter with Synchronous Reference Frame Voltage Control. IEEE Trans. Power Electron. 2018, 33, 6333–6350. [Google Scholar] [CrossRef]
- De Bosio, F.; De Souza Ribeiro, L.A.; Freijedo, F.D.; Pastorelli, M.; Guerrero, J.M. Effect of State Feedback Coupling and System Delays on the Transient Performance of Stand-Alone VSI with LC Output Filter. IEEE Trans. Ind. Electron. 2016, 63, 4909–4918. [Google Scholar] [CrossRef]
- Loh, P.C.; Holmes, D.G. Analysis of Multiloop Control Strategies for LC/CL/LCL-Filtered Voltage-Source and Current-Source Inverters. IEEE Trans. Ind. Appl. 2005, 41, 644–654. [Google Scholar] [CrossRef]
- Loh, P.C.; Newman, M.J.; Zmood, D.N.; Holmes, D.G. A Comparative Analysis of Multiloop Voltage Regulation Strategies for Single and Three-Phase UPS Systems. IEEE Trans. Power Electron. 2003, 18, 1176–1185. [Google Scholar]
- Cortes, P.; Ortiz, G.; Yuz, J.I.; Rodriguez, J.; Vazquez, S.; Franquelo, L.G. Model Predictive Control of an Inverter with Output LC Filter for UPS Applications. IEEE Trans. Ind. Electron. 2009, 56, 1875–1883. [Google Scholar] [CrossRef]
- Gholami-Khesht, H.; Davari, P.; Blaabjerg, F. Adaptive Predictive-DPC for LCL-Filtered Grid Connected VSC with Reduced Number of Sensors. In Proceedings of the 2020 22nd European Conference on Power Electronics and Applications (EPE’20 ECCE Europe), Lyon, France, 7–11 September 2020. [Google Scholar]
- Bozorgi, A.M.; Gholami-Khesht, H.; Farasat, M.; Mehraeen, S.; Monfared, M. Model Predictive Direct Power Control of Three-Phase Grid-Connected Converters with Fuzzy-Based Duty Cycle Modulation. IEEE Trans. Ind. Appl. 2018, 54, 4875–4885. [Google Scholar] [CrossRef]
- Pilloni, A.; Pisano, A.; Usai, E. Robust Finite-Time Frequency and Voltage Restoration of Inverter-Based Microgrids via Sliding-Mode Cooperative Control. IEEE Trans. Ind. Electron. 2018, 65, 907–917. [Google Scholar] [CrossRef]
- Komurcugil, H. Rotating-Sliding-Line-Based Sliding-Mode Control for Single-Phase UPS Inverters. IEEE Trans. Ind. Electron. 2012, 59, 3719–3726. [Google Scholar] [CrossRef]
- Celani, F.; Macellari, M.; Schirone, L. Discrete-Time Control for DC–AC Converters Based on Sliding Mode Design. IET Power Electron. 2012, 5, 833–840. [Google Scholar]
- Kukrer, O.; Komurcugil, H.; Doganalp, A. A Three-Level Hysteresis Function Approach to the Sliding-Mode Control of Single-Phase UPS Inverters. IEEE Trans. Ind. Electron. 2009, 56, 3477–3486. [Google Scholar] [CrossRef]
- Gholami-Khesht, H.; Monfared, M. Adaptive Predictive Voltage Control of Three-Phase PWM-VSCs in UPS Applications. In Proceedings of the 2016 International Siberian Conference on Control and Communications (SIBCON), Moscow, Russia, 12–14 May 2016; pp. 1–6. [Google Scholar]
- Kim, J.; Choi, H.h.; Jung, J.-W. MRAC-Based Voltage Controller for Three-Phase CVCF Inverters to Attenuate Parameter Uncertainties Under Critical Load Conditions. IEEE Trans. Power Electron. 2020, 35, 1002–1013. [Google Scholar] [CrossRef]
- Do, T.D.; Leu, V.Q.; Choi, Y.S.; Choi, H.H.; Jung, J.W. An Adaptive Voltage Control Strategy of Three-Phase Inverter for Stand-Alone Distributed Generation Systems. IEEE Trans. Ind. Electron. 2013, 60, 5660–5672. [Google Scholar] [CrossRef]
- Alhasheem, M.; Mattavelli, P.; Davari, P. Harmonics Mitigation and Non-ideal Voltage Compensation Utilising Active Power Filter based on Predictive Current Control. IET Power Electron. 2020, 13, 2782–2793. [Google Scholar] [CrossRef]
- Davari, P.; Yang, Y.; Zare, F.; Blaabjerg, F. Predictive Pulse-Pattern Current Modulation Scheme for Harmonic Reduction in Three-Phase Multidrive Systems. IEEE Trans. Ind. Electron. 2016, 63, 5932–5942. [Google Scholar] [CrossRef]
- Bozorgi, A.M.; Gholami-Khesht, H.; Farasat, M.; Mehraeen, S.; Monfared, M. Voltage Sensorless Improved Model Predictive Direct power Control for Three-Phase Grid-Connected Converters. In Proceedings of the 2017 IEEE Energy Conversion Congress and Exposition (ECCE), Cincinnati, OH, USA, 1–5 October 2017; pp. 4957–4963. [Google Scholar]
- Gholami-Khesht, H.; Monfared, M. Deadbeat Direct Power Control for Grid Connected Inverters Using a Full-Order Observer. In Proceedings of the 2015 4th International Conference on Electric Power and Energy Conversion Systems (EPECS), Sharjah, UAE, 24–26 November 2015; pp. 6–10. [Google Scholar]
- Lascu, C.; Argeseanu, A.; Blaabjerg, F. Supertwisting Sliding-Mode Direct Torque and Flux Control of Induction Machine Drives. IEEE Trans. Power Electron. 2020, 35, 5057–5065. [Google Scholar] [CrossRef]
- Vieira, R.P.; Martins, L.T.; Massing, J.R.; Stefanello, M. Sliding Mode Controller in a Multiloop Framework for a Grid-Connected VSI With LCL Filter. IEEE Trans. Ind. Electron. 2018, 65, 4714–4723. [Google Scholar] [CrossRef]
- Guzman, R.; de Vicuna, L.G.; Castilla, M.; Miret, J.; Martin, H. Variable Structure Control in Natural Frame for Three-Phase Grid-Connected Inverters With LCL Filter. IEEE Trans. Power Electron. 2018, 33, 4512–4522. [Google Scholar] [CrossRef]
- Astrom, K.J.; Wittenmark, B. Adaptive Control, 2nd ed; Addison-Wesley: New York, USA, 1995. [Google Scholar]
- Abdel-Rady, I.M.Y.; El-Saadany, E.F. Adaptive Discrete-Time Grid-Voltage Sensorless Interfacing Scheme for Grid-Connected DG-Inverters Based on Neural-Network Identification and Deadbeat Current Regulation. IEEE Trans. Power Electron. 2008, 23, 308–321. [Google Scholar]
- Abdel-Rady, I.M.Y.; El-Saadany, E.F. An Improved Deadbeat Current Control Scheme With A Novel Adaptive Self-Tuning Load Model for a Three-Phase PWM Voltage-Source Inverter. IEEE Trans. Ind. Electron. 2007, 54, 747–759. [Google Scholar] [CrossRef]
- Karamanakos, P.; Geyer, T. Guidelines for the Design of Finite Control Set Model Predictive Controllers. IEEE Trans. Power Electron. 2020, 35, 7434–7450. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Voltage Source Inverter(VSI) and Inductor and Capacitor (LC) Filter | |
| Nominal power | 5 (kW) |
| Line voltage (rms) | 400 (V) |
| Output frequency (f) | 50 (Hz) |
| Inductor (Lf) | 4 (mH) |
| Capacitor (Cf) | 20 (µF) |
| DC-link voltage (Vdc) | 700 (V) |
| Sampling time (TS) | 25 (µs) |
| Linear Load | |
| Three-phase resistive load | 30 (Ω) |
| Nonlinear Load | |
| Three-phase diode-bridge rectifier | |
| Resistive load | 60 (Ω) |
| Control Parameters | |
| λSW | 0.5 |
| Observer Poles | 0.03, 0.05, 0.35, 0.95 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gholami-Khesht, H.; Davari, P.; Blaabjerg, F. An Adaptive Model Predictive Voltage Control for LC-Filtered Voltage Source Inverters. Appl. Sci. 2021, 11, 704. https://doi.org/10.3390/app11020704
Gholami-Khesht H, Davari P, Blaabjerg F. An Adaptive Model Predictive Voltage Control for LC-Filtered Voltage Source Inverters. Applied Sciences. 2021; 11(2):704. https://doi.org/10.3390/app11020704
Chicago/Turabian StyleGholami-Khesht, Hosein, Pooya Davari, and Frede Blaabjerg. 2021. "An Adaptive Model Predictive Voltage Control for LC-Filtered Voltage Source Inverters" Applied Sciences 11, no. 2: 704. https://doi.org/10.3390/app11020704
APA StyleGholami-Khesht, H., Davari, P., & Blaabjerg, F. (2021). An Adaptive Model Predictive Voltage Control for LC-Filtered Voltage Source Inverters. Applied Sciences, 11(2), 704. https://doi.org/10.3390/app11020704