
Aerial Tele-Manipulation with Passive Tool via Parallel Position/Force Control †

 , , ,
, , , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
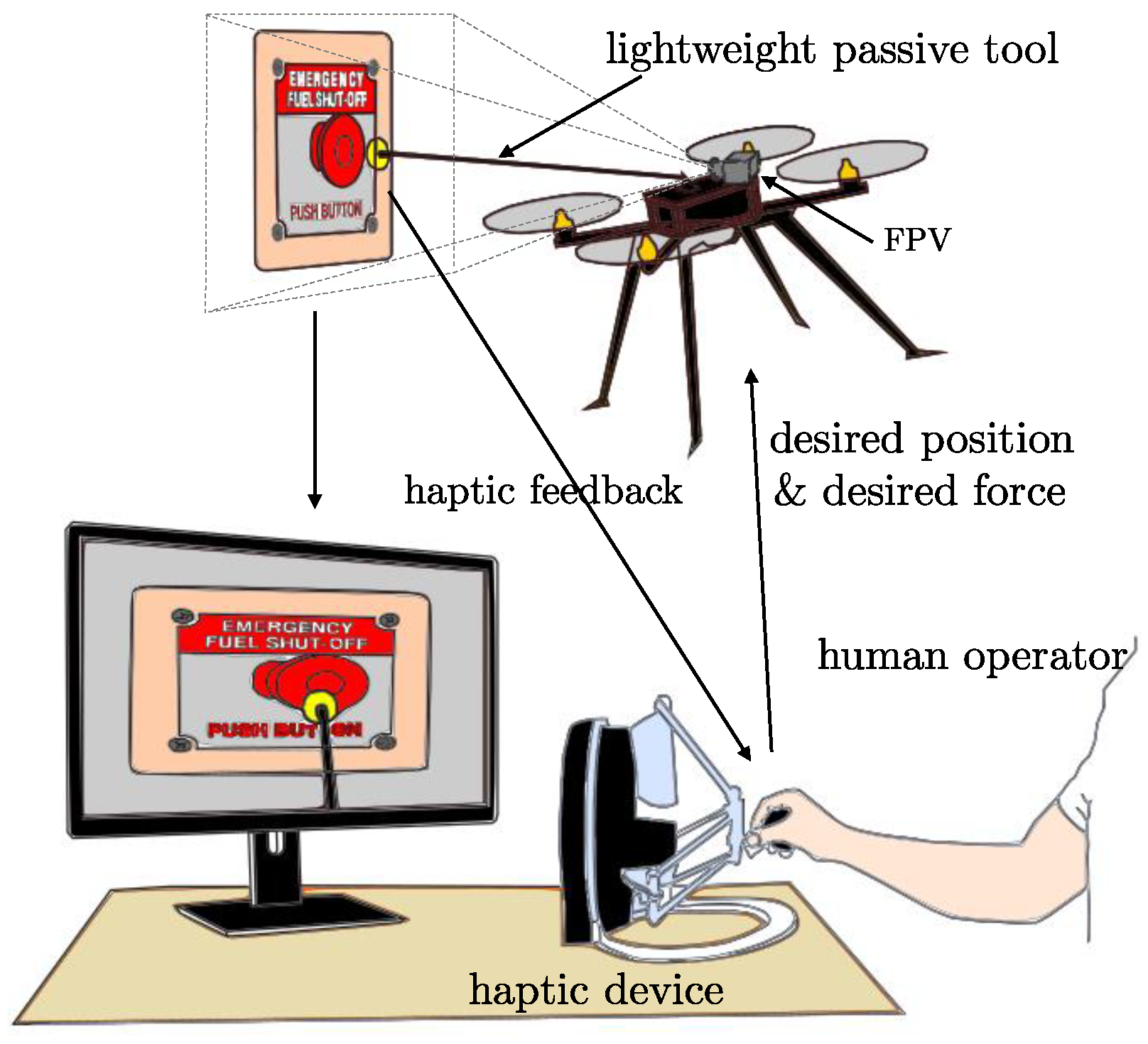
:1. Introduction
Related Works and Contribution
- (i)
- using active manipulators; and
- (ii)
- using passive tools;
- (1)
- the force control in [26] is based on a mapping that calculates the appropriate robot’s desired orientation to generate the desired force; in this work, we use a more efficient sensor-based closed-loop force control;
- (2)
- the force controller considers the limited friction of the end-effector and object surfaces, and utilizes the independently controlled yaw motion, which allows a wider range of feasible force commands by using the passive compliant spherical joint mechanism of the end-effector, enforcing the contact maintenance;
- (3)
- the stability analysis of the system is presented;
- (4)
- this work presents experimental results of tracking 3D force vectors applied to both stationary and moving objects.
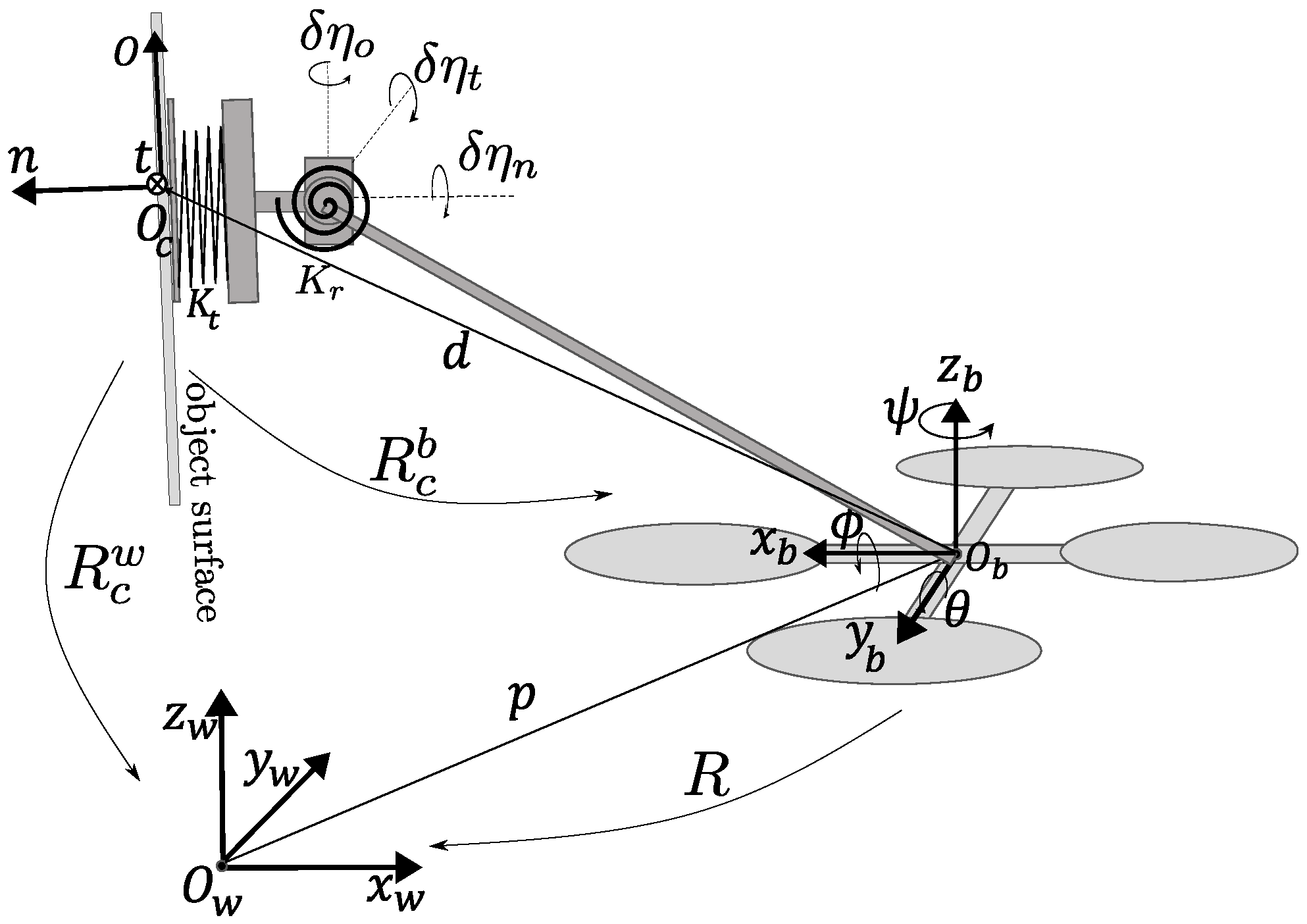
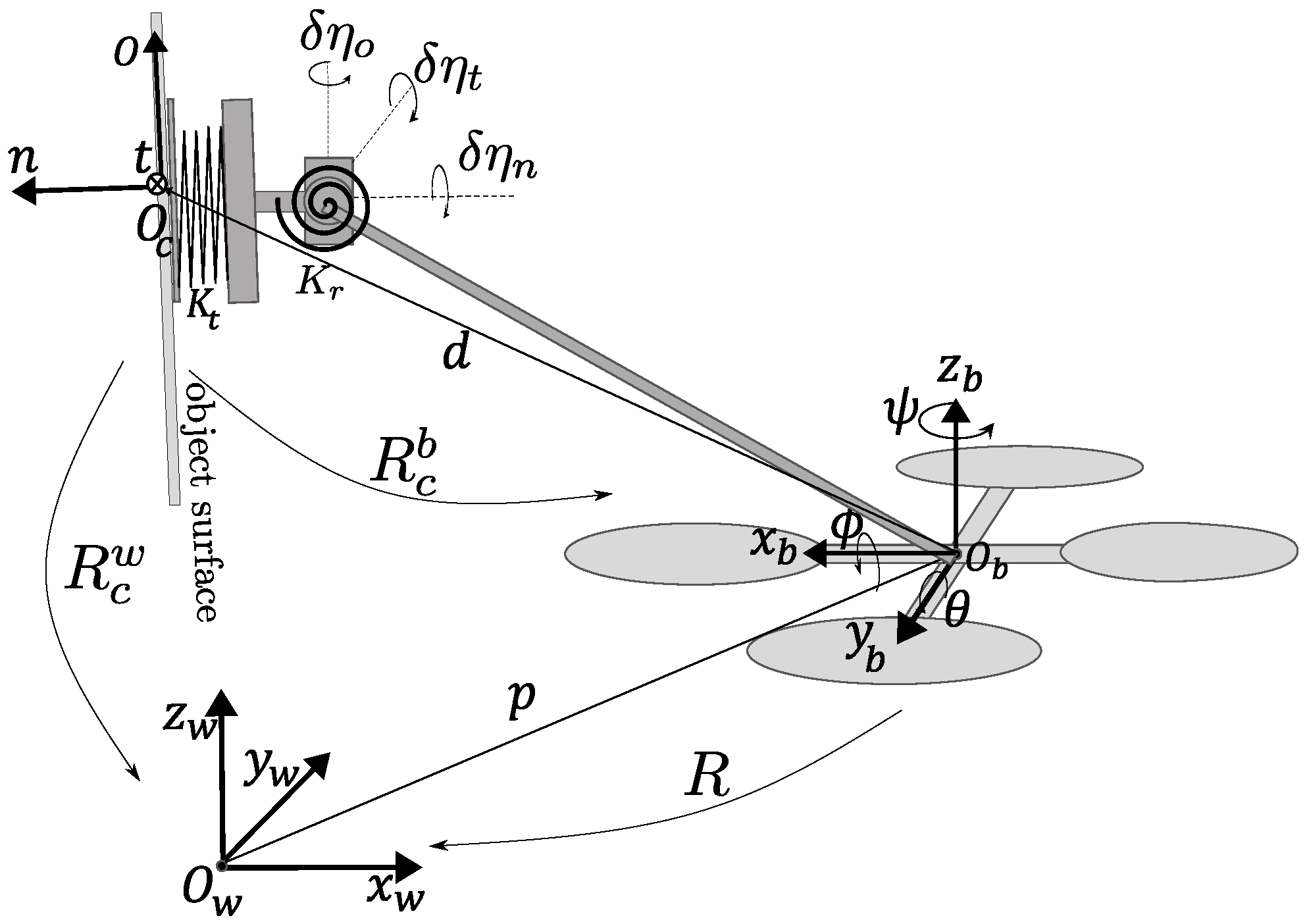
2. Dynamic Model
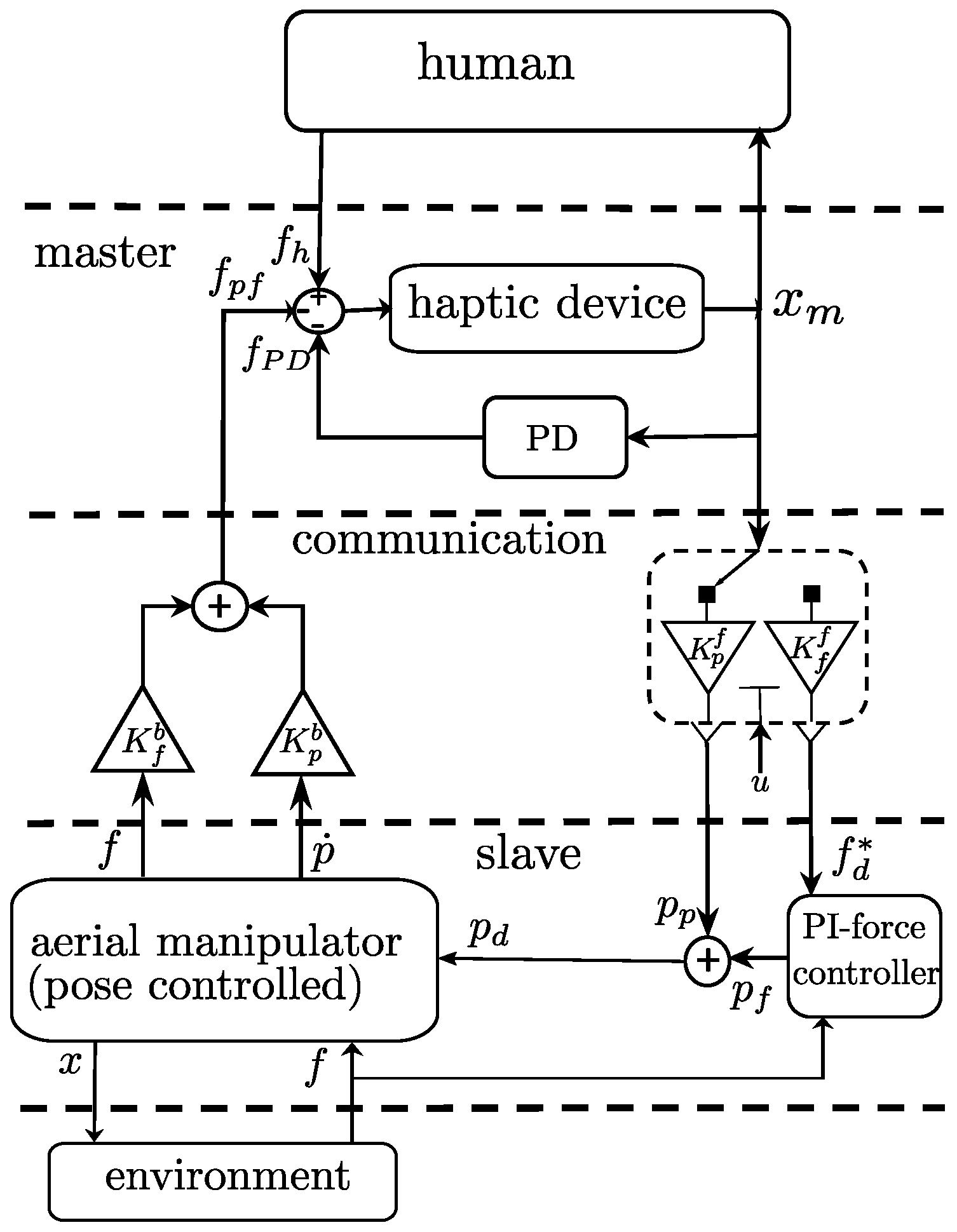
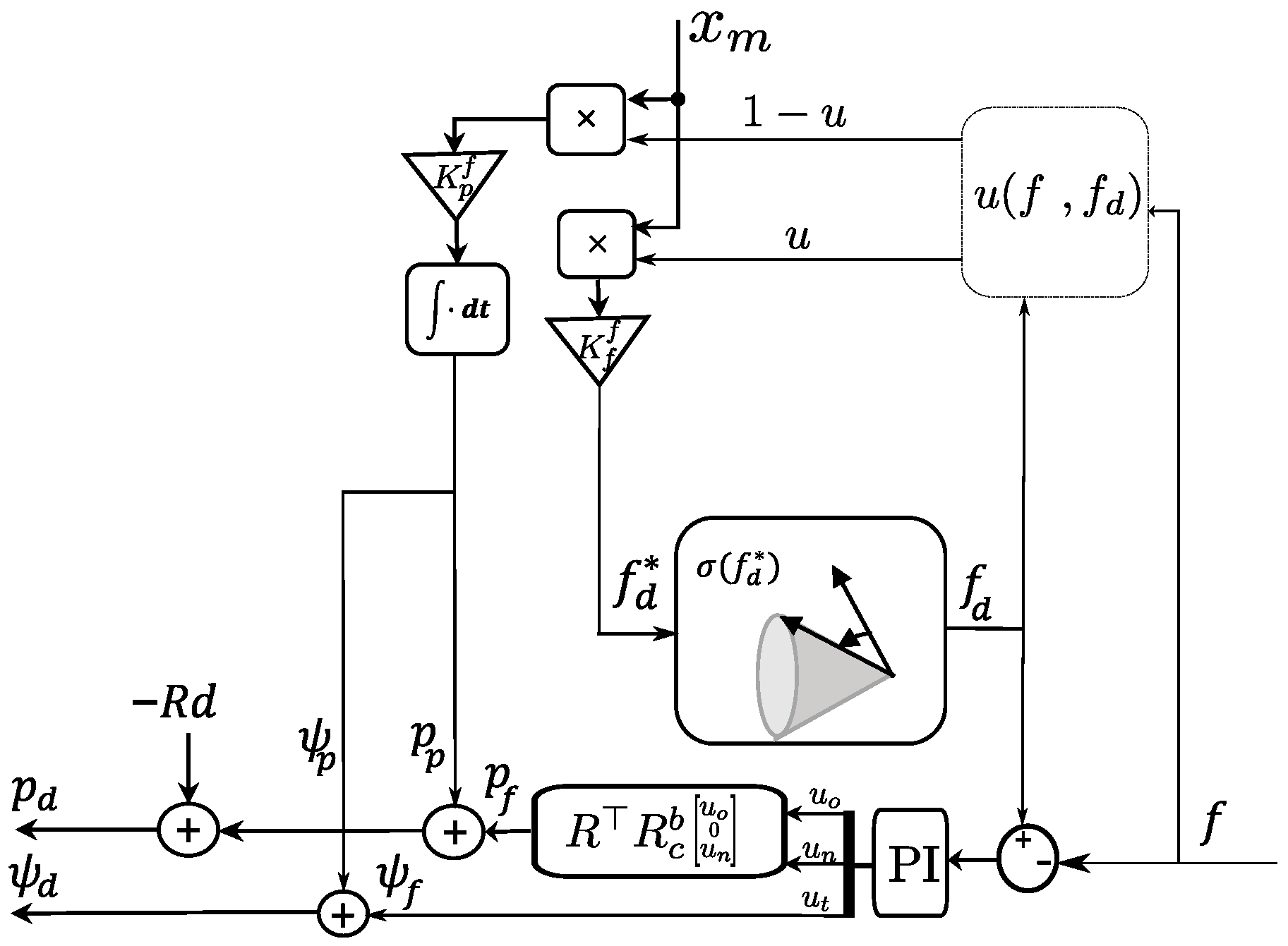
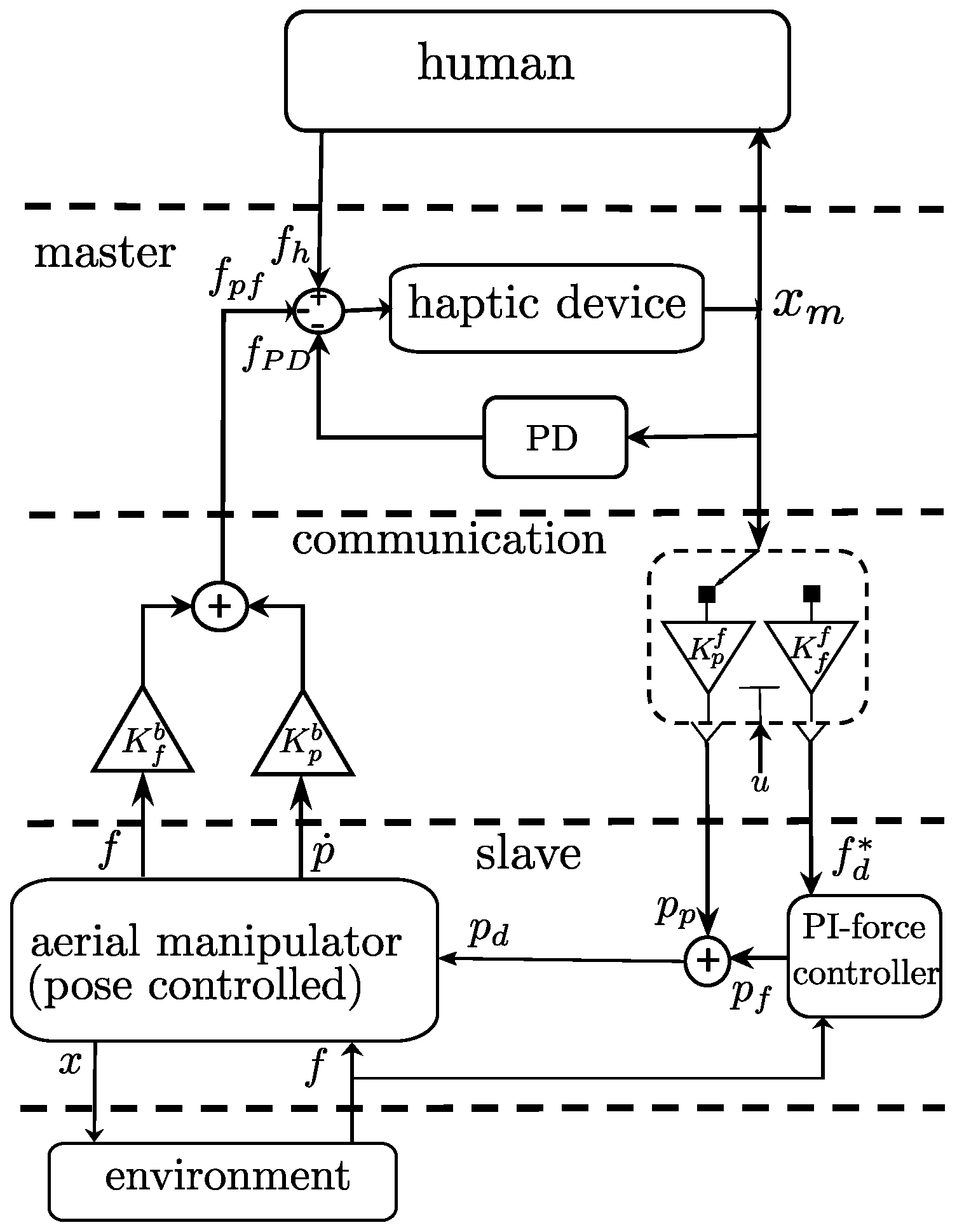
3. Control System
3.1. Position Control
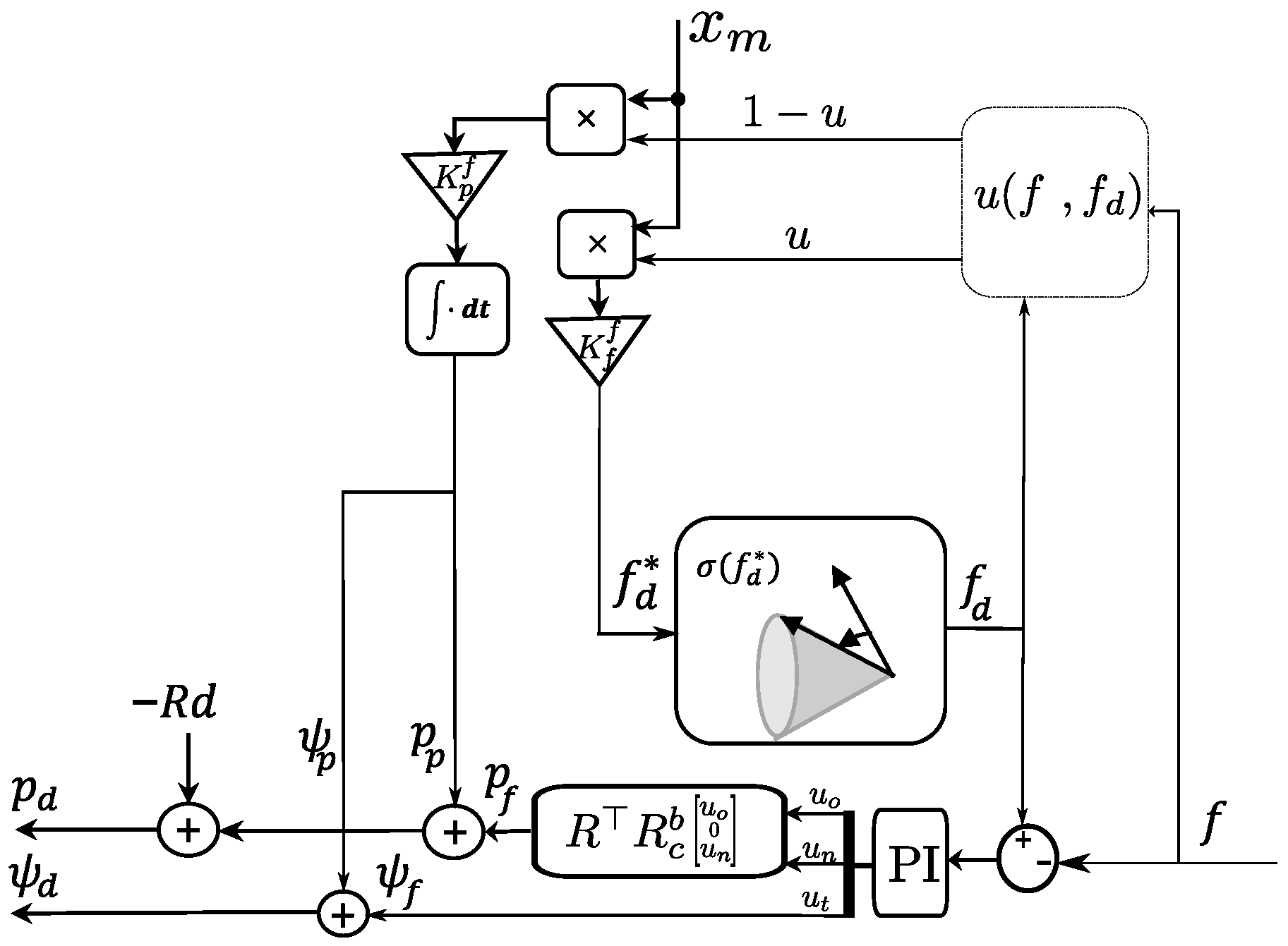
3.2. Force Control
3.3. Master Control and Haptic Feedback
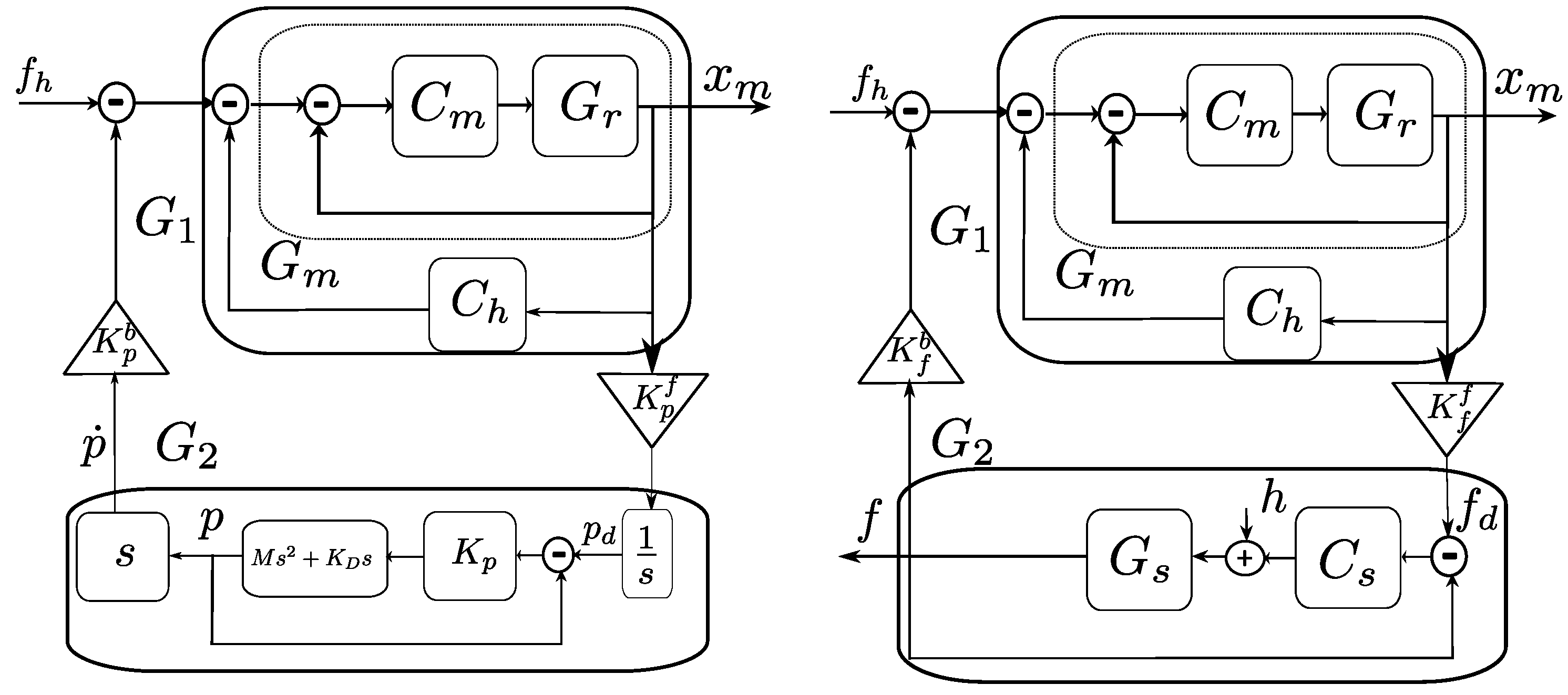
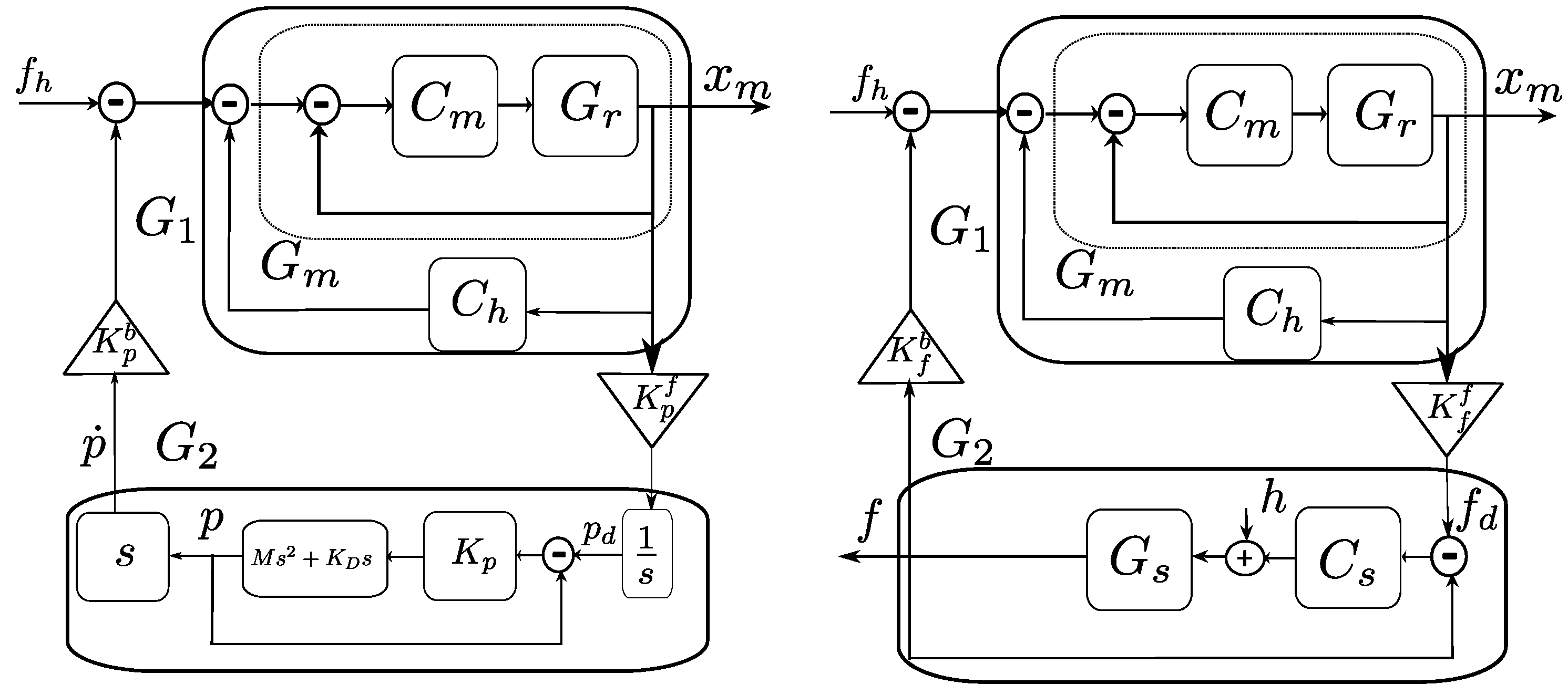
4. Stability Analysis
4.1. Rotational Stability
- M is symmetric positive definite and bounded as ; where are its minimum and maximum eigenvalues. Moreover, M is strictly diagonally dominant (SDD), that is ;
- is skew-symmetric, or ;
- , where ;
- the rotational stiffness matrix is bounded as .
4.2. Force Control Stability
4.2.1. Force along n-Axis
4.2.2. Force along o-Axis
4.2.3. Force along t-Axis
4.3. Stability of Teleoperator in Contact Interaction
4.4. Stability of Teleoperator in Free Flight
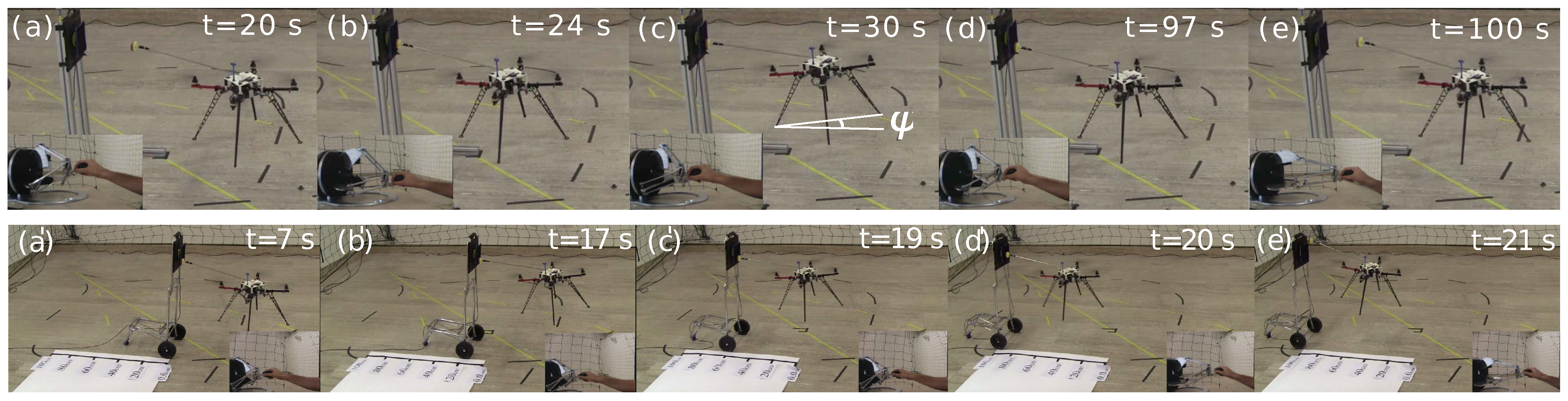
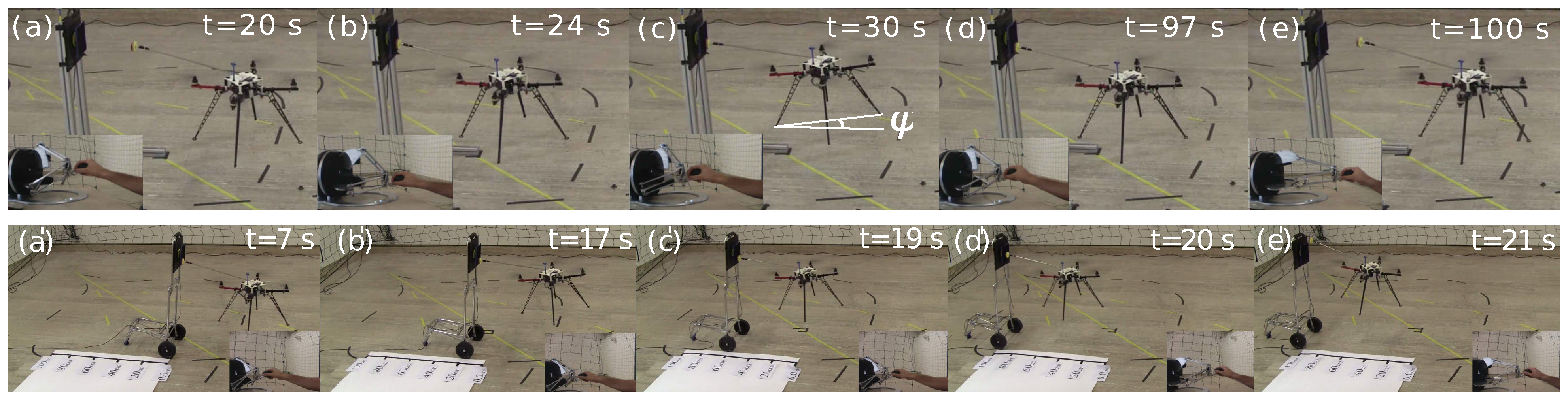
5. Experimental Results
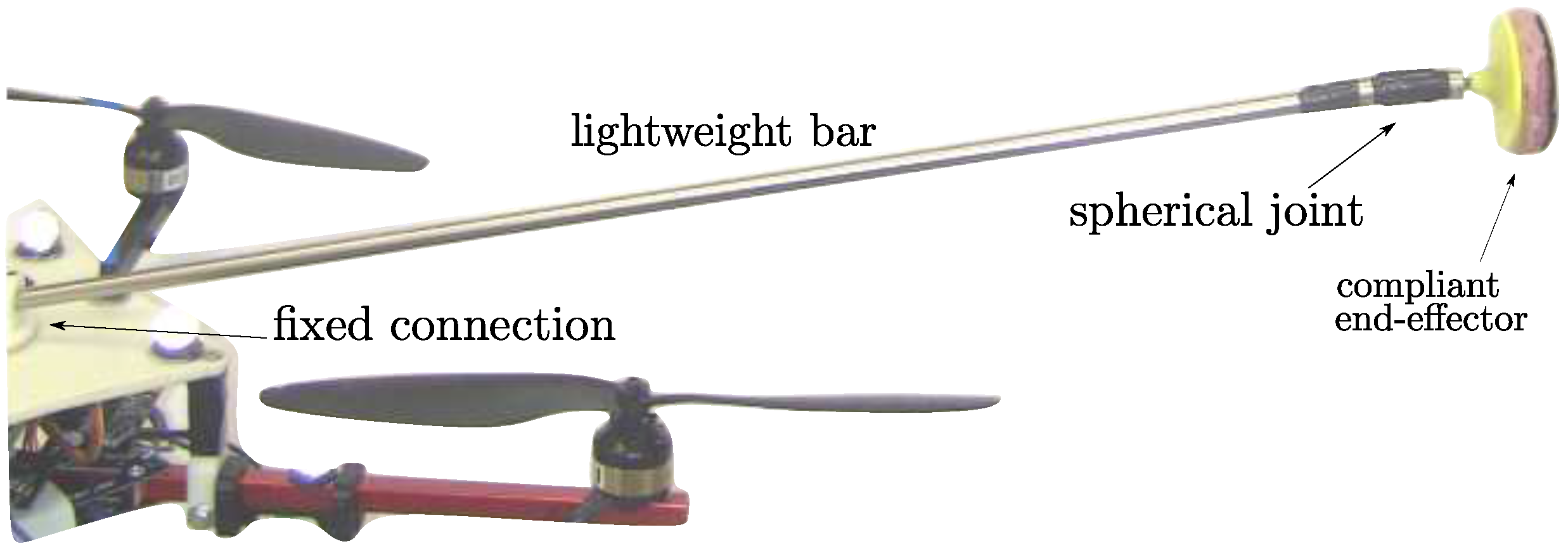
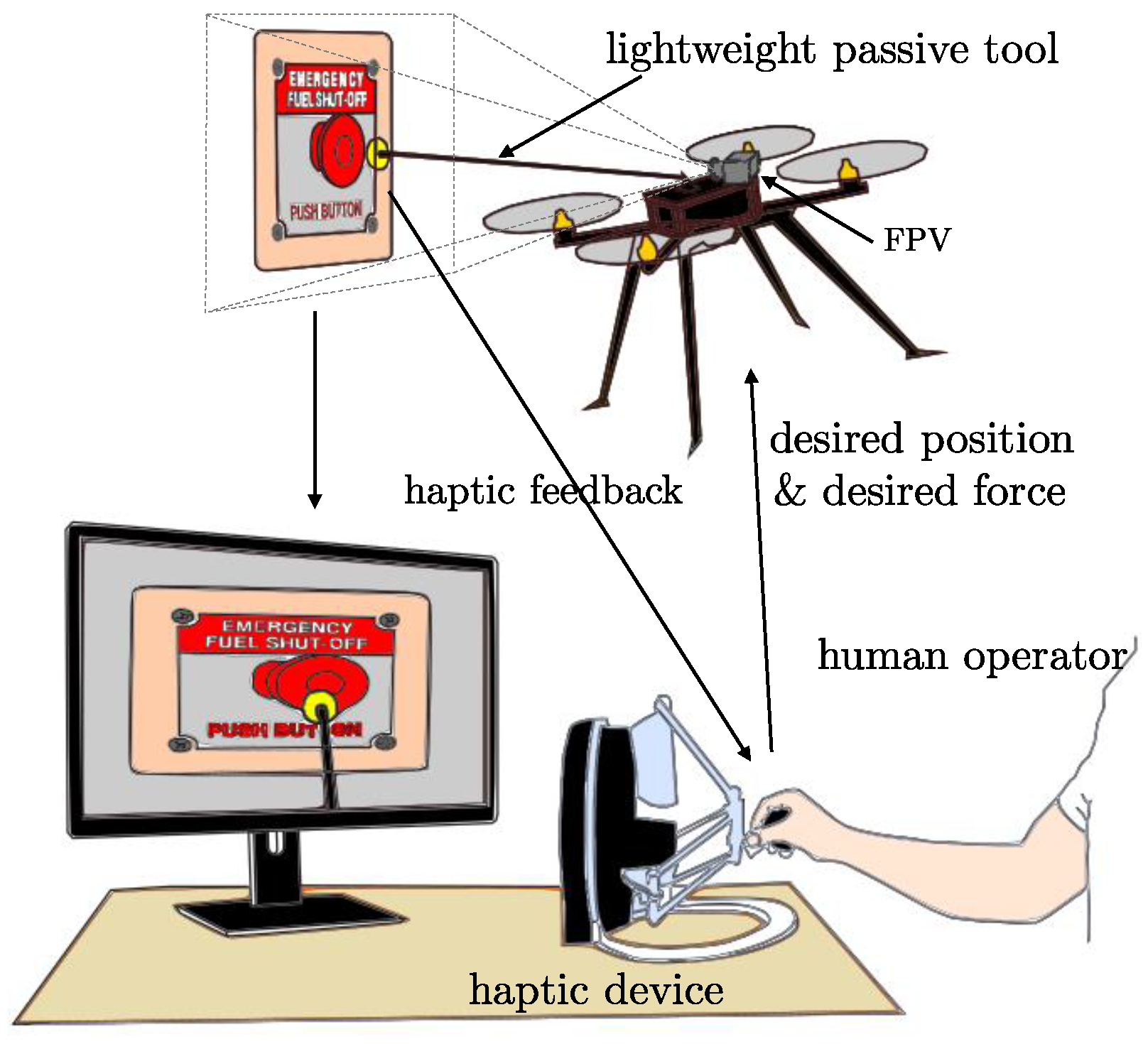
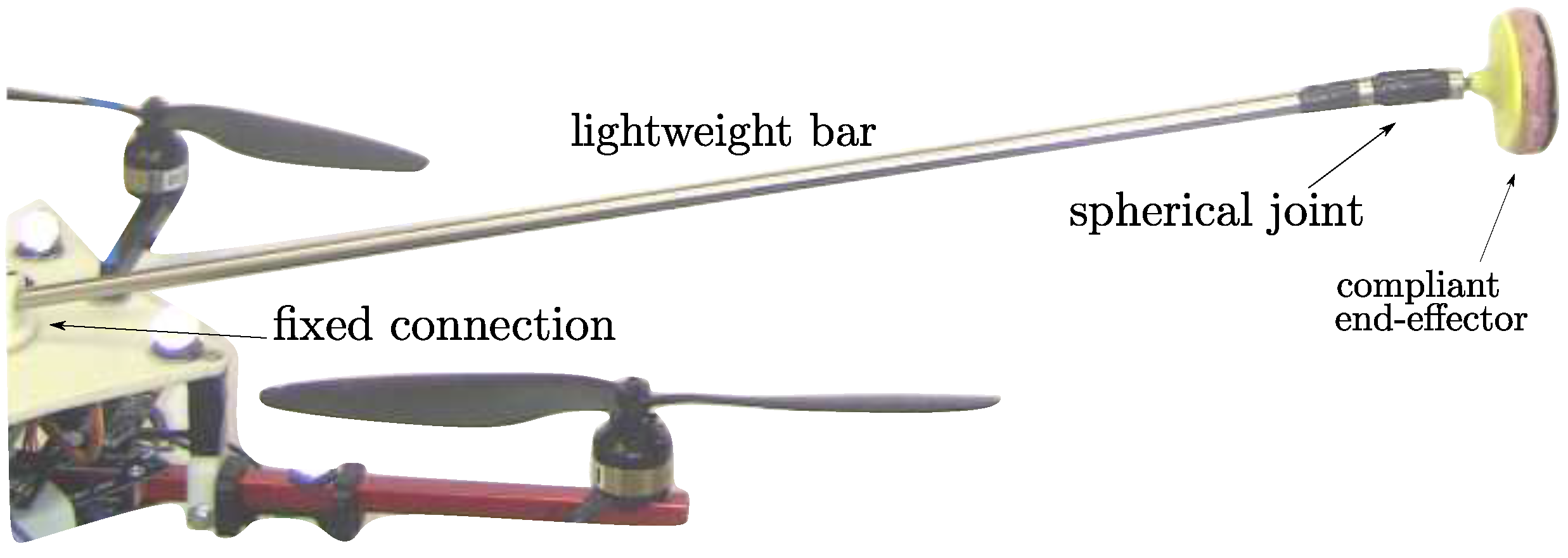
5.1. Experimental Setup
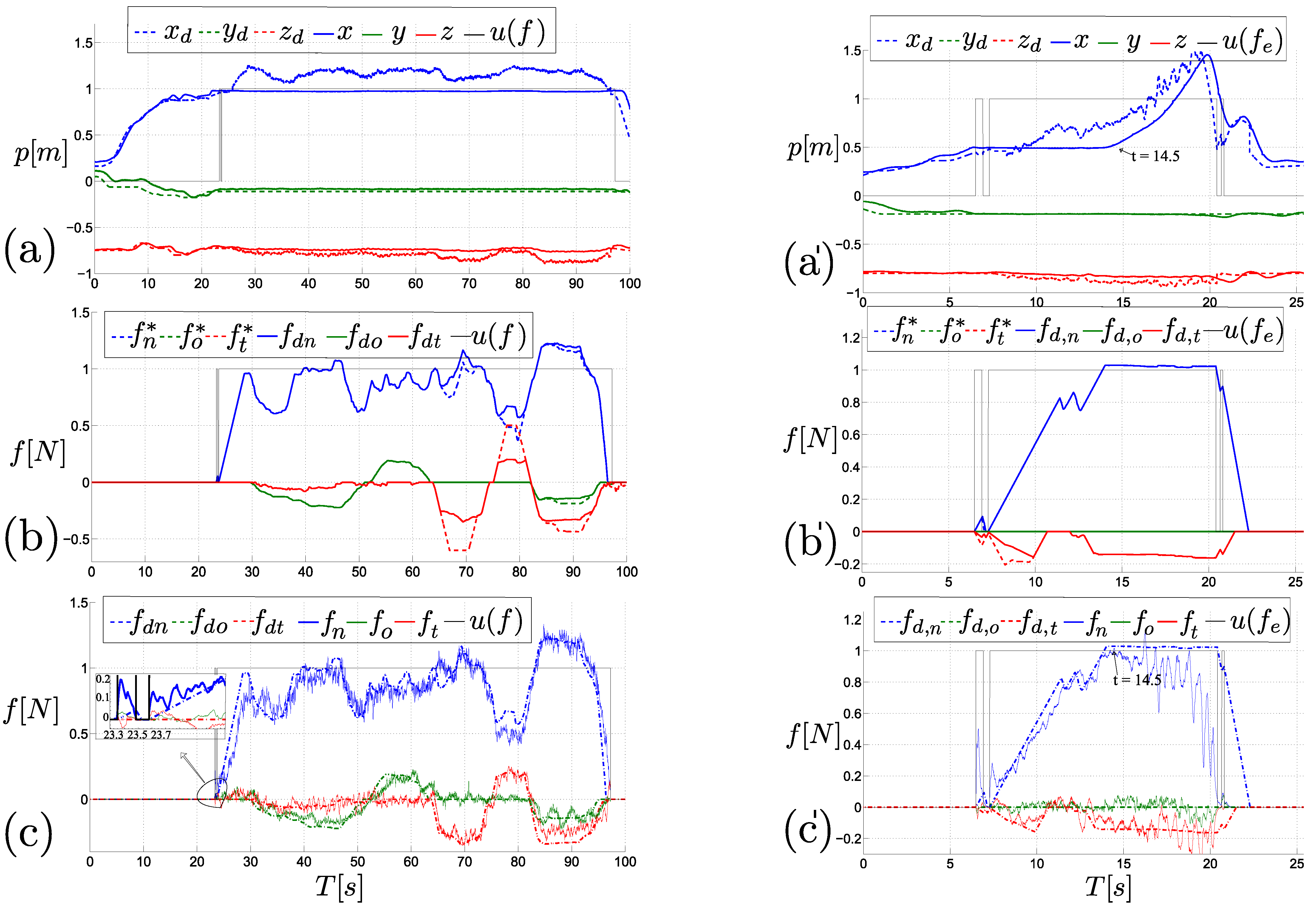
5.2. Results
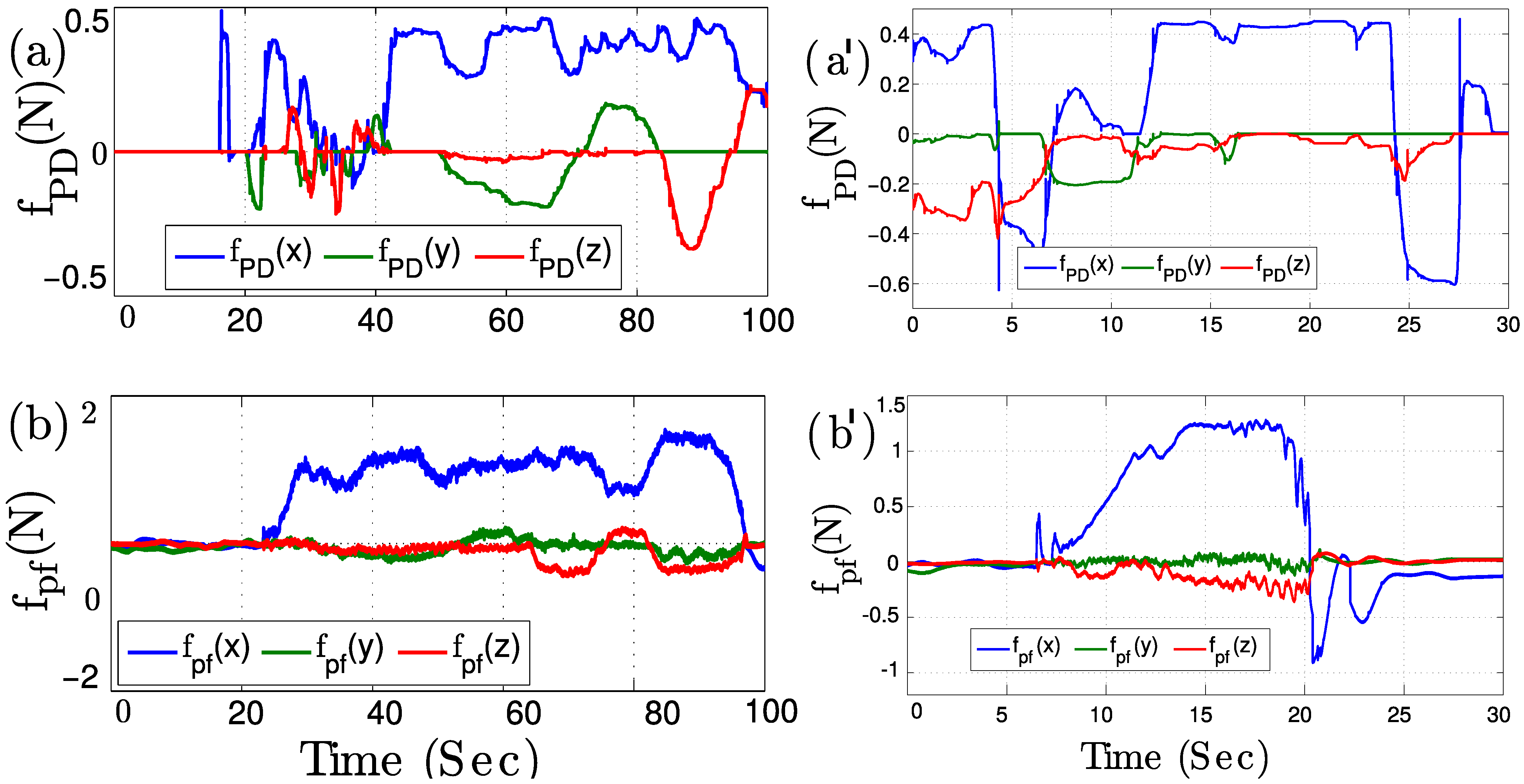
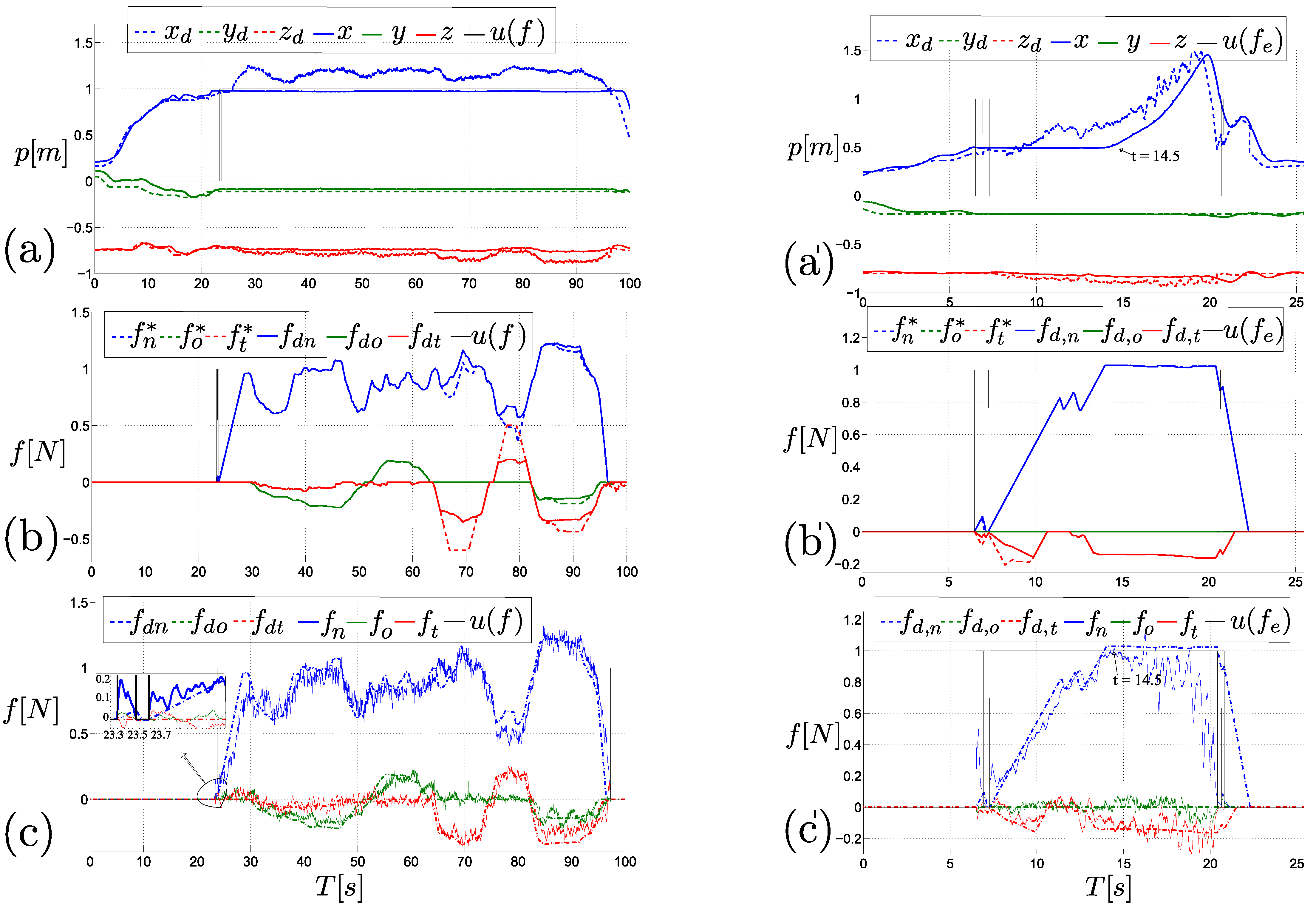
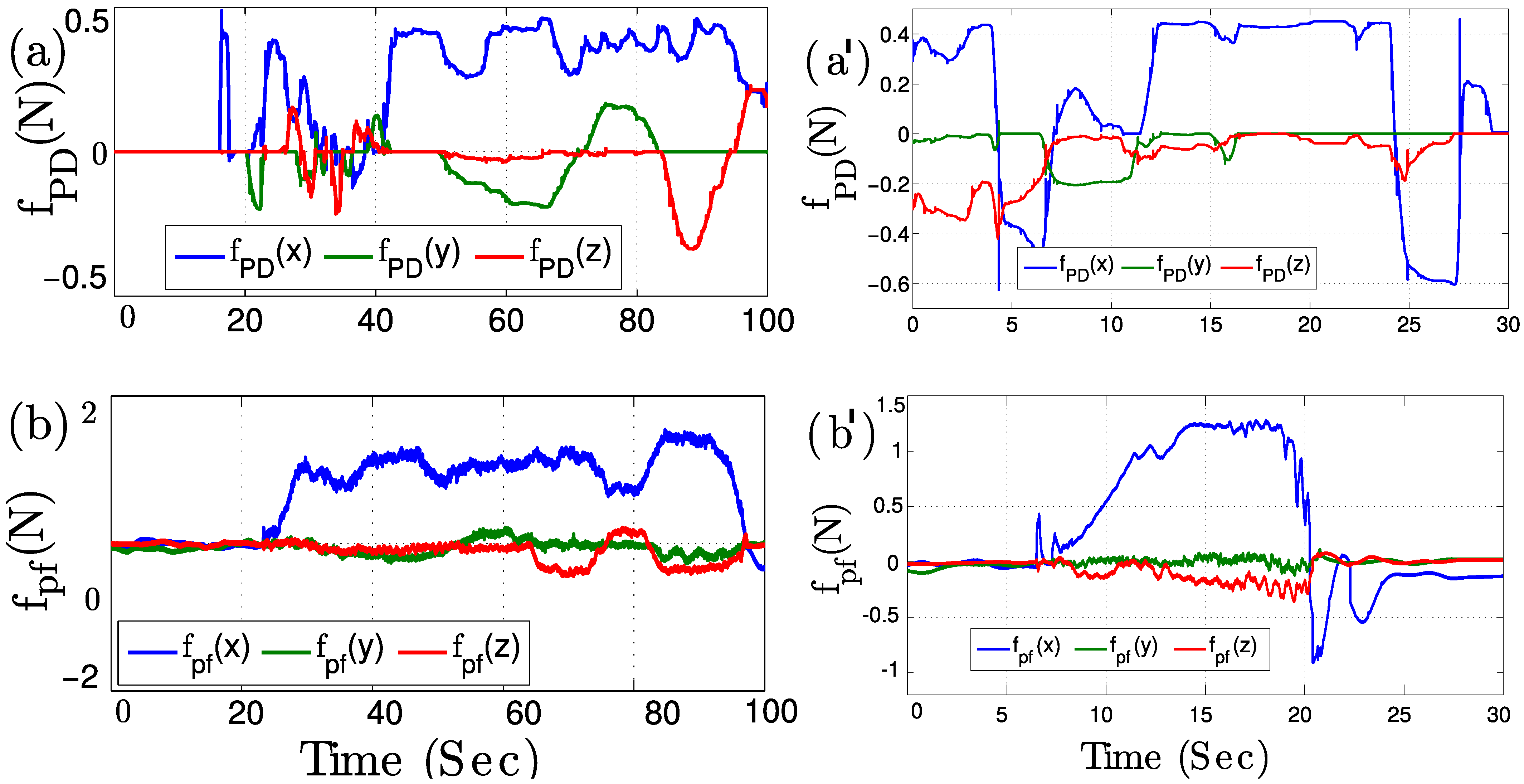
5.2.1. Stationary Object Experiment
5.2.2. Movable Object Experiment
5.3. Discussion
6. Conclusions and Future Works
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tognon, M.; Chavez, H.A.T.; Gasparin, E.; Sablé, Q.; Bicego, D.; Mallet, A.; Lany, M.; Santi, G.; Revaz, B.; Cortés, J.; et al. A Truly Redundant Aerial Manipulator System with Application to Push-and-Slide Inspection in Industrial Plants. IEEE Robot. Autom. Lett. 2019, 4, 1846–1851. [Google Scholar] [CrossRef] [Green Version]
- Trujillo, M.Á.; Martínez-de Dios, J.R.; Martín, C.; Viguria, A.; Ollero, A. Novel Aerial Manipulator for Accurate and Robust Industrial NDT Contact Inspection: A New Tool for the Oil and Gas Inspection Industry. Sensors 2019, 19, 1305. [Google Scholar] [CrossRef] [Green Version]
- Smrcka, D.; Baca, T.; Nascimento, T.; Saska, M. Admittance Force-Based UAV-Wall Stabilization and Press Exertion for Documentation and Inspection of Historical Buildings. In Proceedings of the 2021 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 15–18 June 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 552–559. [Google Scholar]
- Li, G.; Ge, R.; Loianno, G. Cooperative Transportation of Cable Suspended Payloads With MAVs Using Monocular Vision and Inertial Sensing. IEEE Robot. Autom. Lett. 2021, 6, 5316–5323. [Google Scholar]
- Bernard, M.; Kondak, K.; Maza, I.; Ollero, A. Autonomous transportation and deployment with aerial robots for search and rescue missions. J. Field Robot. 2011, 28, 914–931. [Google Scholar] [CrossRef] [Green Version]
- Ruggiero, F.; Lippiello, V.; Ollero, A. Aerial Manipulation: A Literature Review. IEEE Robot. Autom. Lett. 2018, 3, 1957–1964. [Google Scholar] [CrossRef] [Green Version]
- Ollero, A.; Tognon, M.; Suarez, A.; Lee, D.J.; Franchi, A. Past, Present, and Future of Aerial Robotic Manipulators. IEEE Trans. Robot. 2021, 1–20. [Google Scholar] [CrossRef]
- Park, S.; Lee, J.; Ahn, J.; Kim, M.; Her, J.; Yang, G.H.; Lee, D. ODAR: Aerial Manipulation Platform Enabling Omnidirectional Wrench Generation. IEEE/ASME Trans. Mechatron. 2018, 23, 1907–1918. [Google Scholar] [CrossRef]
- Ryll, M.; Muscio, G.; Pierri, F.; Cataldi, E.; Antonelli, G.; Caccavale, F.; Bicego, D.; Franchi, A. 6D Interaction Control with Aerial Robots: The Flying End-Effector Paradigm. Int. J. Robot. Res. 2019, 38, 1045–1062. [Google Scholar] [CrossRef] [Green Version]
- Staub, N.; Bicego, D.; Sablé, Q.; Arellano-Quintana, V.; Mishra, S.; Franchi, A. Towards a Flying Assistant Paradigm: The OTHex. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation, Brisbane, QLD, Australia, 21–25 May 2018; pp. 6997–7002. [Google Scholar]
- Rashad, R.; Bicego, D.; Jiao, R.; Sanchez-Escalonilla, S.; Stramigioli, S. Towards Vision-Based Impedance Control for the Contact Inspection of Unknown Generically-Shaped Surfaces with a Fully-Actuated UAV. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October–24 January 2021; IEEE: Piscataway, NJ, USA, 2020; pp. 1605–1612. [Google Scholar]
- Aerial-Core. EU Coll. Proj. H2020-ICT-2019-2. Available online: https://aerial-core.eu/ (accessed on 1 September 2021).
- Scholten, J.L.; Fumagalli, M.; Stramigioli, S.; Carloni, R. Interaction control of an UAV endowed with a manipulator. In Proceedings of the Robotics and Automation (ICRA), 2013 IEEE International Conference on Karlsruhe, Karlsruhe, Germany, 6–10 May 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 4910–4915. [Google Scholar]
- Fanni, M.; Khalifa, A. A new 6-DOF quadrotor manipulation system: Design, kinematics, dynamics, and control. IEEE/ASME Trans. Mechatron. 2017, 22, 1315–1326. [Google Scholar] [CrossRef]
- Orsag, M.; Korpela, C.M.; Bogdan, S.; Oh, P.Y. Hybrid adaptive control for aerial manipulation. J. Intell. Robot. Syst. 2014, 73, 693–707. [Google Scholar] [CrossRef]
- Mebarki, R.; Lippiello, V.; Siciliano, B. Image-based control for dynamically cross-coupled aerial manipulation. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 4827–4833. [Google Scholar]
- Kim, S.; Seo, H.; Choi, S.; Kim, H.J. Vision-guided aerial manipulation using a multirotor with a robotic arm. IEEE/ASME Trans. Mechatron. 2016, 21, 1912–1923. [Google Scholar] [CrossRef]
- Baizid, K.; Giglio, G.; Pierri, F.; Trujillo, M.A.; Antonelli, G.; Caccavale, F.; Viguria, A.; Chiaverini, S.; Ollero, A. Behavioral control of unmanned aerial vehicle manipulator systems. Auton. Robot. 2017, 41, 1203–1220. [Google Scholar] [CrossRef] [Green Version]
- Mebarki, R.; Lippiello, V.; Siciliano, B. Toward image-based visual servoing for cooperative aerial manipulation. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 6074–6080. [Google Scholar]
- Gioioso, G.; Ryll, M.; Prattichizzo, D.; Bülthoff, H.H.; Franchi, A. Turning a near-hovering controlled quadrotor into a 3D force effector. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 6278–6284. [Google Scholar]
- Bartelds, T.; Capra, A.; Hamaza, S.; Stramigioli, S.; Fumagalli, M. Compliant Aerial Manipulators: Toward a New Generation of Aerial Robotic Workers. IEEE Robot. Autom. Lett. 2016, 1, 477–483. [Google Scholar] [CrossRef] [Green Version]
- Bellens, S.; De Schutter, J.; Bruyninckx, H. A hybrid pose/wrench control framework for quadrotor helicopters. In Proceedings of the Robotics and Automation (ICRA), 2012 IEEE International Conference on, Saint Paul, MN, USA, 14–18 May 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 2269–2274. [Google Scholar]
- Nguyen, H.N.; Lee, D. Hybrid force/motion control and internal dynamics of quadrotors for tool operation. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 3458–3464. [Google Scholar]
- Alexis, K.; Darivianakis, G.; Burri, M.; Siegwart, R. Aerial robotic contact-based inspection: Planning and control. Auton. Robot. 2016, 40, 631–655. [Google Scholar] [CrossRef]
- Mersha, A.Y.; Stramigioli, S.; Carloni, R. On bilateral teleoperation of aerial robots. IEEE Trans. Robot. 2014, 30, 258–274. [Google Scholar] [CrossRef]
- Gioioso, G.; Mohammadi, M.; Franchi, A.; Prattichizzo, D. A force-based bilateral teleoperation framework for aerial robots in contact with the environment. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 318–324. [Google Scholar]
- Prattichizzo, D.; Trinkle, J.C. Grasping, Springer Handbook of Robotics; Springer: Berlin/Heidelberg, Germany, 2008; pp. 671–700. [Google Scholar]
- Siciliano, B.; Sciavicco, L.; Villani, L.; Oriolo, G. Robotics: Modelling, Planning and Control; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Marquez, H.J. Nonlinear Control Systems: Analysis and Design; Wiley-Interscience: Hoboken, NJ, USA, 2003. [Google Scholar]
- Antonelli, G.; Cataldi, E.; Arrichiello, F.; Giordano, P.R.; Chiaverini, S.; Franchi, A. Adaptive trajectory tracking for quadrotor MAVs in presence of parameter uncertainties and external disturbances. IEEE Trans. Control. Syst. Technol. 2018, 26, 248–254. [Google Scholar] [CrossRef]
- Wen, J.T.; Murphy, S.H. PID Control for Robot Manipulators; Rensselaer Polytechnic Institute: Troy, NY, USA, 1990. [Google Scholar]
- Lawrence, D.A. Stability and transparency in bilateral teleoperation. IEEE Trans. Robot. Autom. 1993, 9, 624–637. [Google Scholar] [CrossRef] [Green Version]
- Tarn, T.J.; Wu, Y.; Xi, N.; Isidori, A. Force regulation and contact transition control. IEEE Control Syst. 1996, 16, 32–40. [Google Scholar]
- Yüksel, B.; Secchi, C.; Bülthoff, H.H.; Franchi, A. Aerial physical interaction via IDA-PBC. Int. J. Robot. Res. 2019, 38, 403–421. [Google Scholar] [CrossRef] [Green Version]
- Hashtrudi-Zaad, K.; Salcudean, S.E. Bilateral parallel force/position teleoperation control. J. Robot. Syst. 2002, 19, 155–167. [Google Scholar] [CrossRef]
- Lee, D.; Spong, M.W. Passive bilateral teleoperation with constant time delay. IEEE Trans. Robot. 2006, 22, 269–281. [Google Scholar] [CrossRef]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mohammadi, M.; Bicego, D.; Franchi, A.; Barcelli, D.; Prattichizzo, D. Aerial Tele-Manipulation with Passive Tool via Parallel Position/Force Control. Appl. Sci. 2021, 11, 8955. https://doi.org/10.3390/app11198955
Mohammadi M, Bicego D, Franchi A, Barcelli D, Prattichizzo D. Aerial Tele-Manipulation with Passive Tool via Parallel Position/Force Control. Applied Sciences. 2021; 11(19):8955. https://doi.org/10.3390/app11198955
Chicago/Turabian StyleMohammadi, Mostafa, Davide Bicego, Antonio Franchi, Davide Barcelli, and Domenico Prattichizzo. 2021. "Aerial Tele-Manipulation with Passive Tool via Parallel Position/Force Control" Applied Sciences 11, no. 19: 8955. https://doi.org/10.3390/app11198955
APA StyleMohammadi, M., Bicego, D., Franchi, A., Barcelli, D., & Prattichizzo, D. (2021). Aerial Tele-Manipulation with Passive Tool via Parallel Position/Force Control. Applied Sciences, 11(19), 8955. https://doi.org/10.3390/app11198955