
Low-Complexity Recursive Least-Squares Adaptive Algorithm Based on Tensorial Forms


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. System Model
3. Tensor-Based RLS Algorithms
3.1. Tensor-Based Recursive Least Squares Algorithm (RLS-T)
| Algorithm 1: RLS-T algorithm | |
| Step | Actions |
| Set | |
| 0 | |
| 1 | Compute , based on (19) |
| 2 | |
| 3 | |
| 4 | |
| 5 | |
3.2. Tensor-Based Recursive Least-Squares Dichotomous Coordinate Descent Algorithm (RLS-DCD-T)
| Algorithm 2: Exponential weighted RLS-T algorithm for one channel | ||
| Step | Actions | Complexity ‘×’ & ‘+’ |
| Set | ||
| 0 | ||
| 1 | Compute , based on (19) | L + & |
| 2 | & | |
| 3 | & | |
| 4 | 0 & 1 | |
| 5 | & | |
| 6 | 0 & (2)+ | |
| 7 | 0 & | |
3.3. DCD Method and Arithmetic Complexity
| Algorithm 3: The DCD iterations with a leading element and overall complexity | ||
| Step | Action | Complexity ‘+’ |
| 1 | × () | |
| 2 | && | (≤ ) + (≤ ) |
| 0 | ||
| 3 | 0 | |
| 4 | ||
| 5 | × | |
| Overall(worse case): | ||
| (2) + | ||
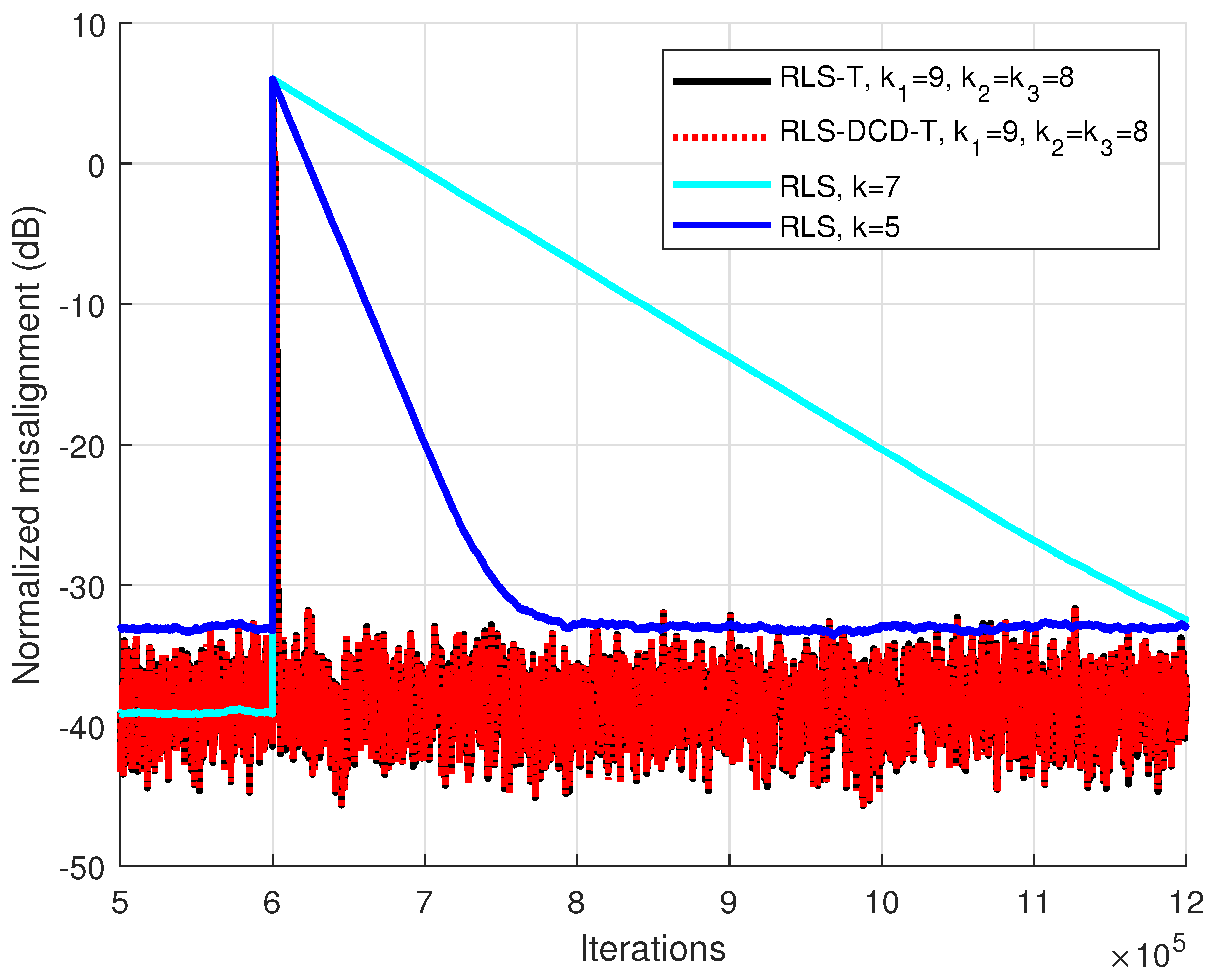
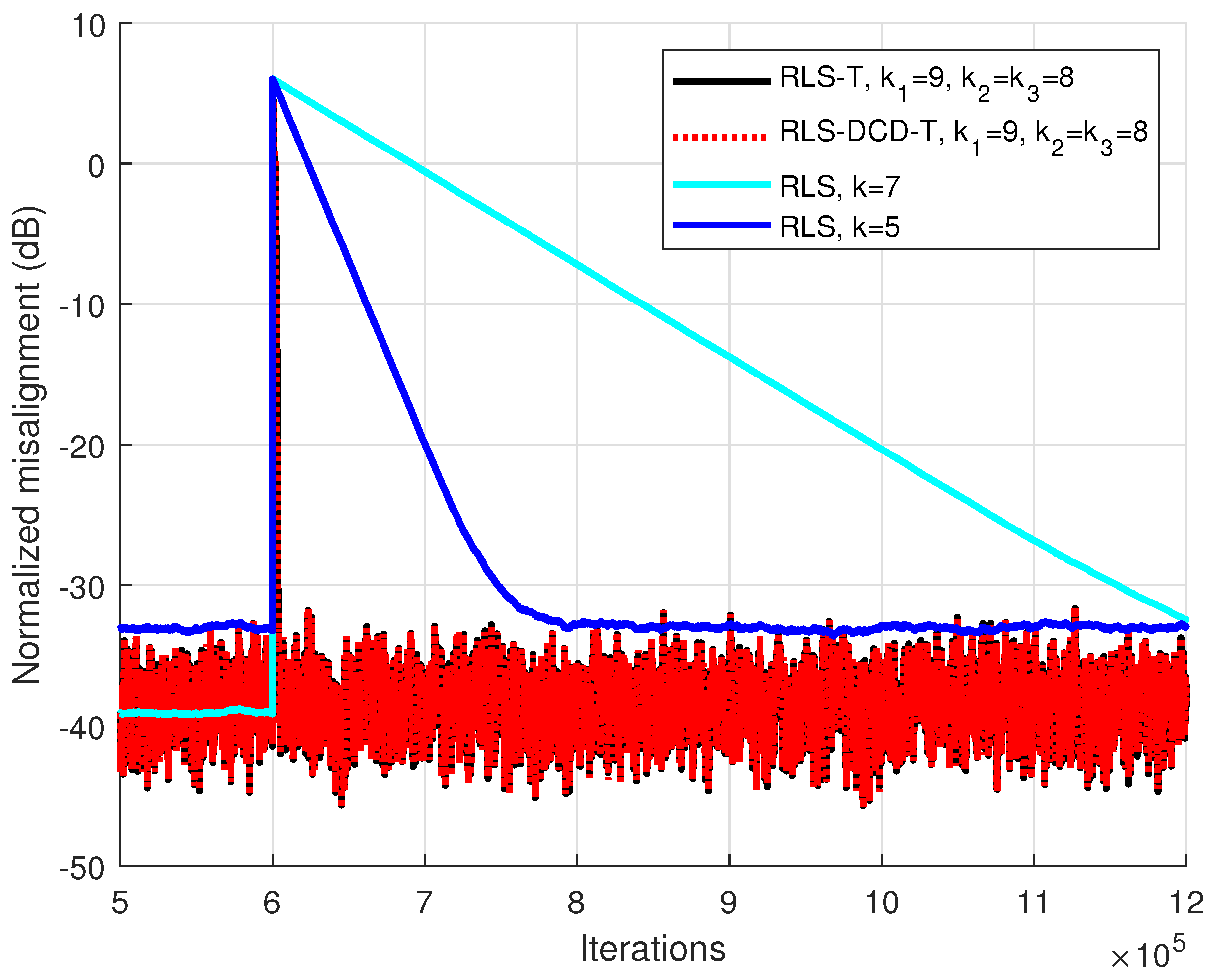
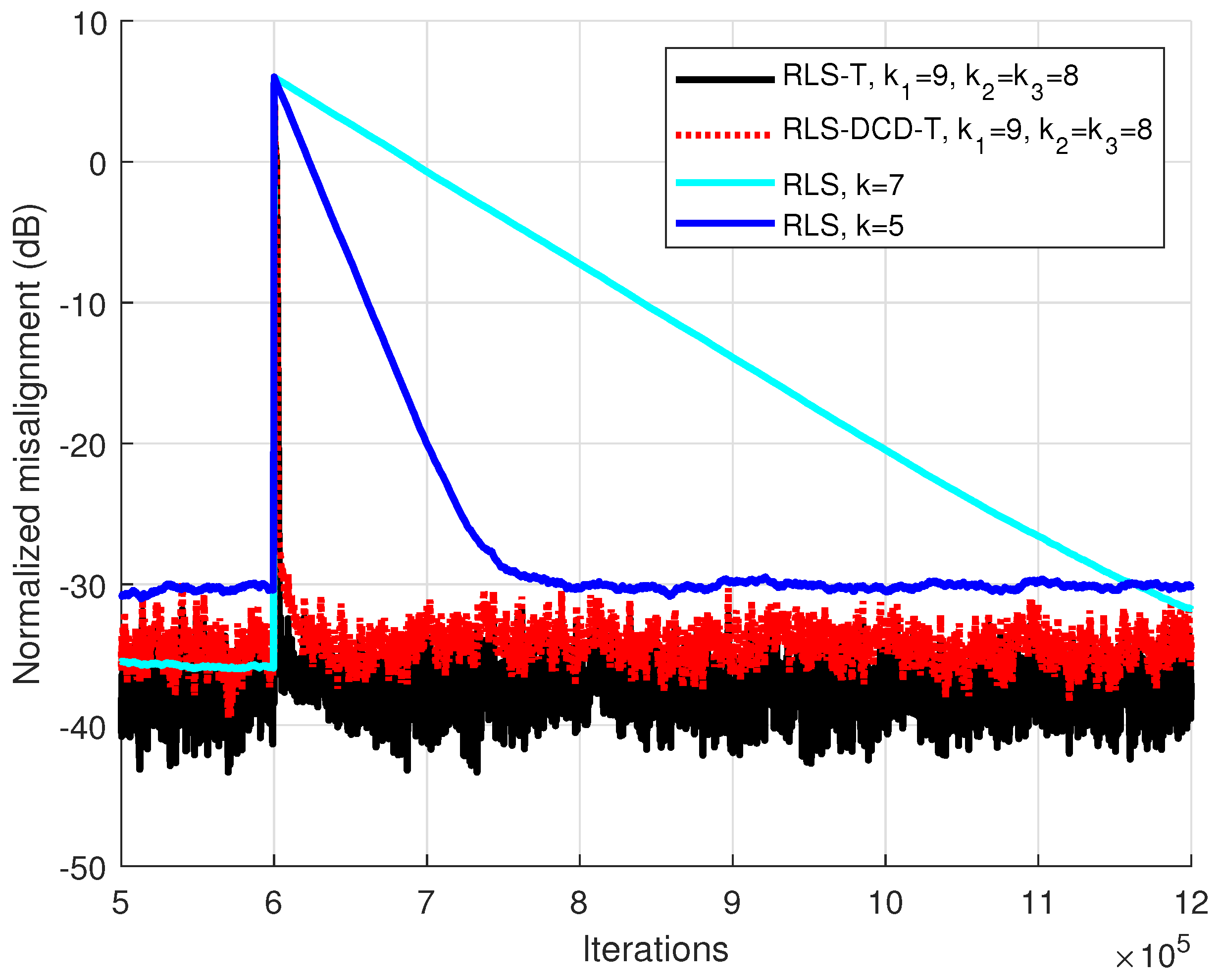
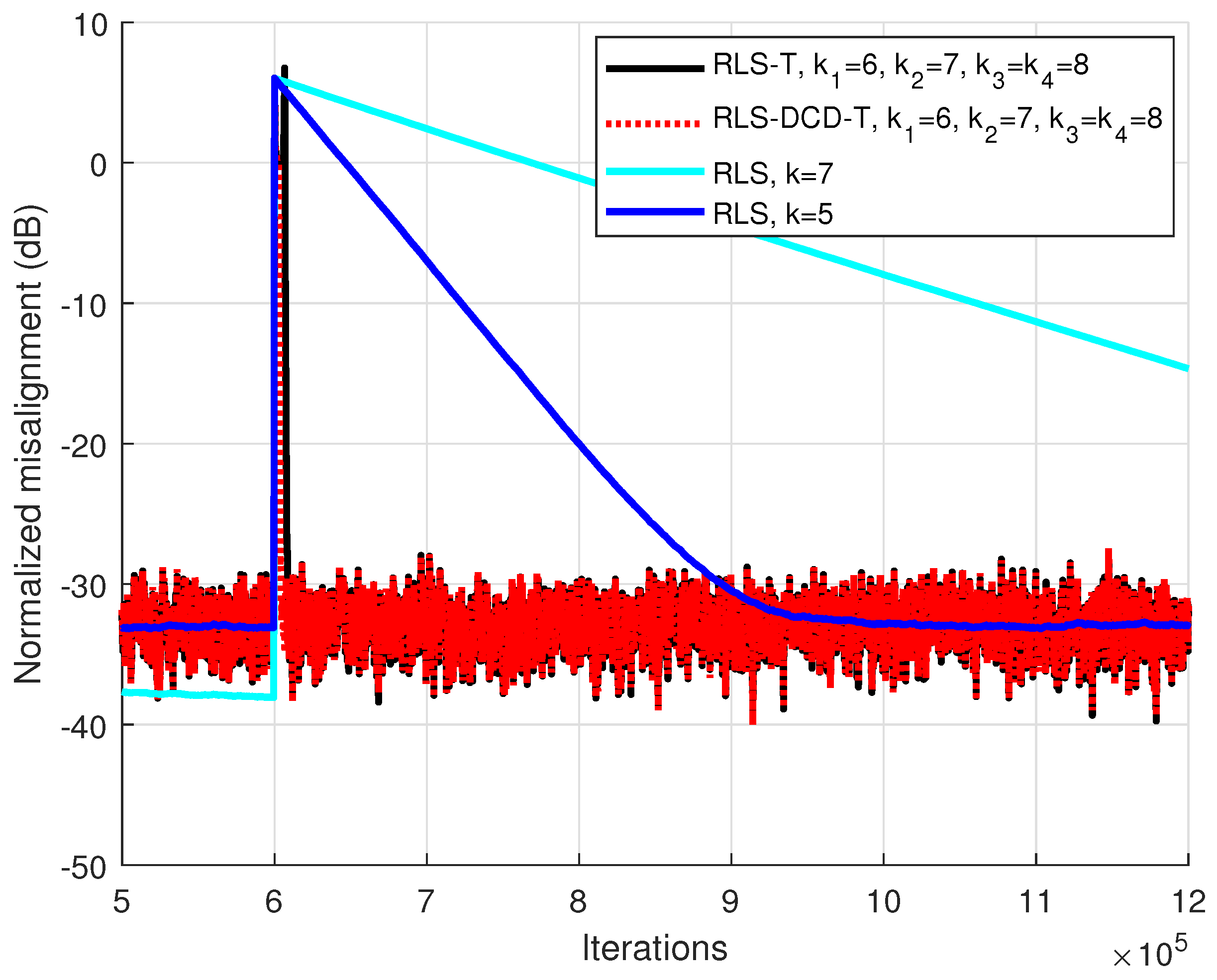
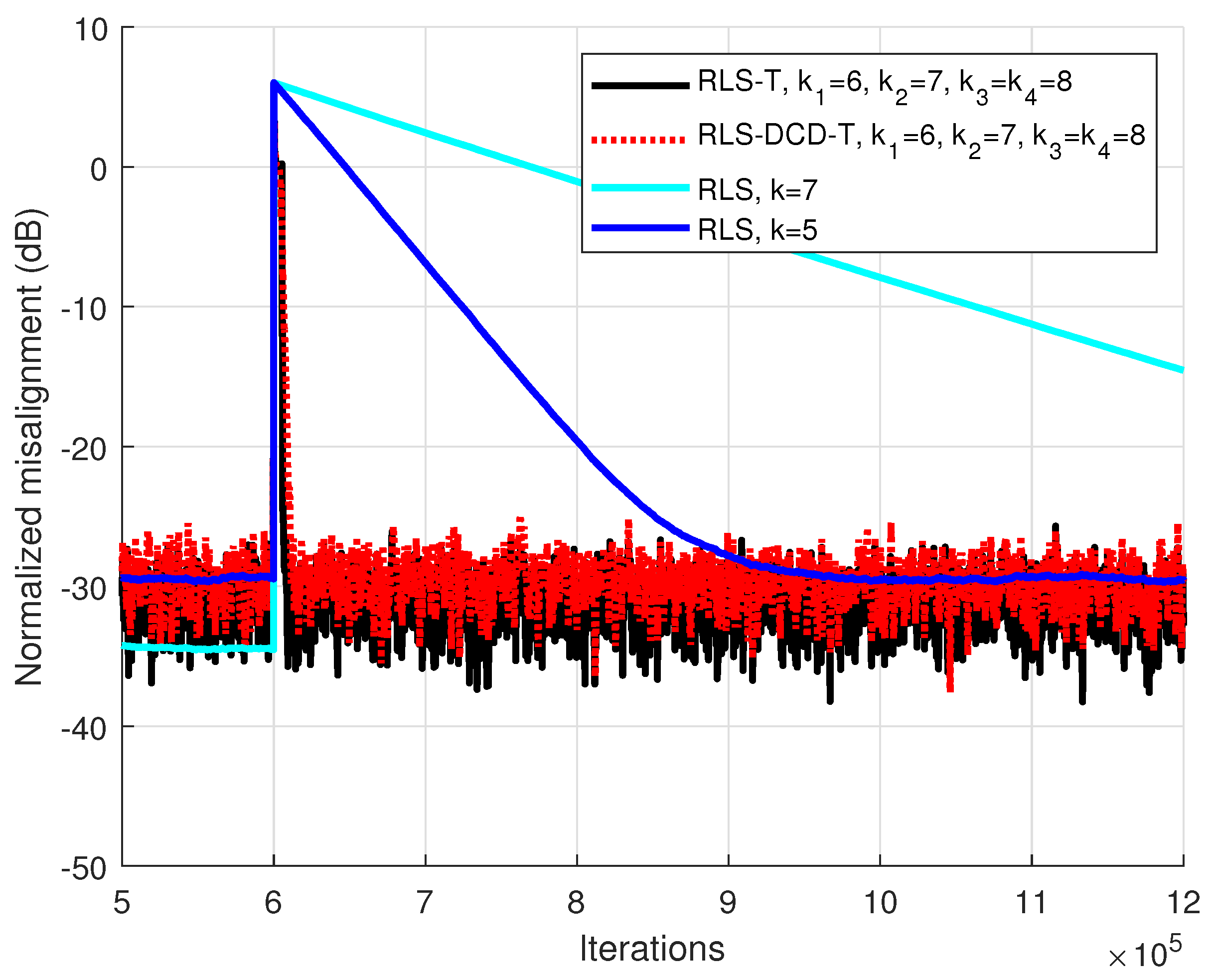
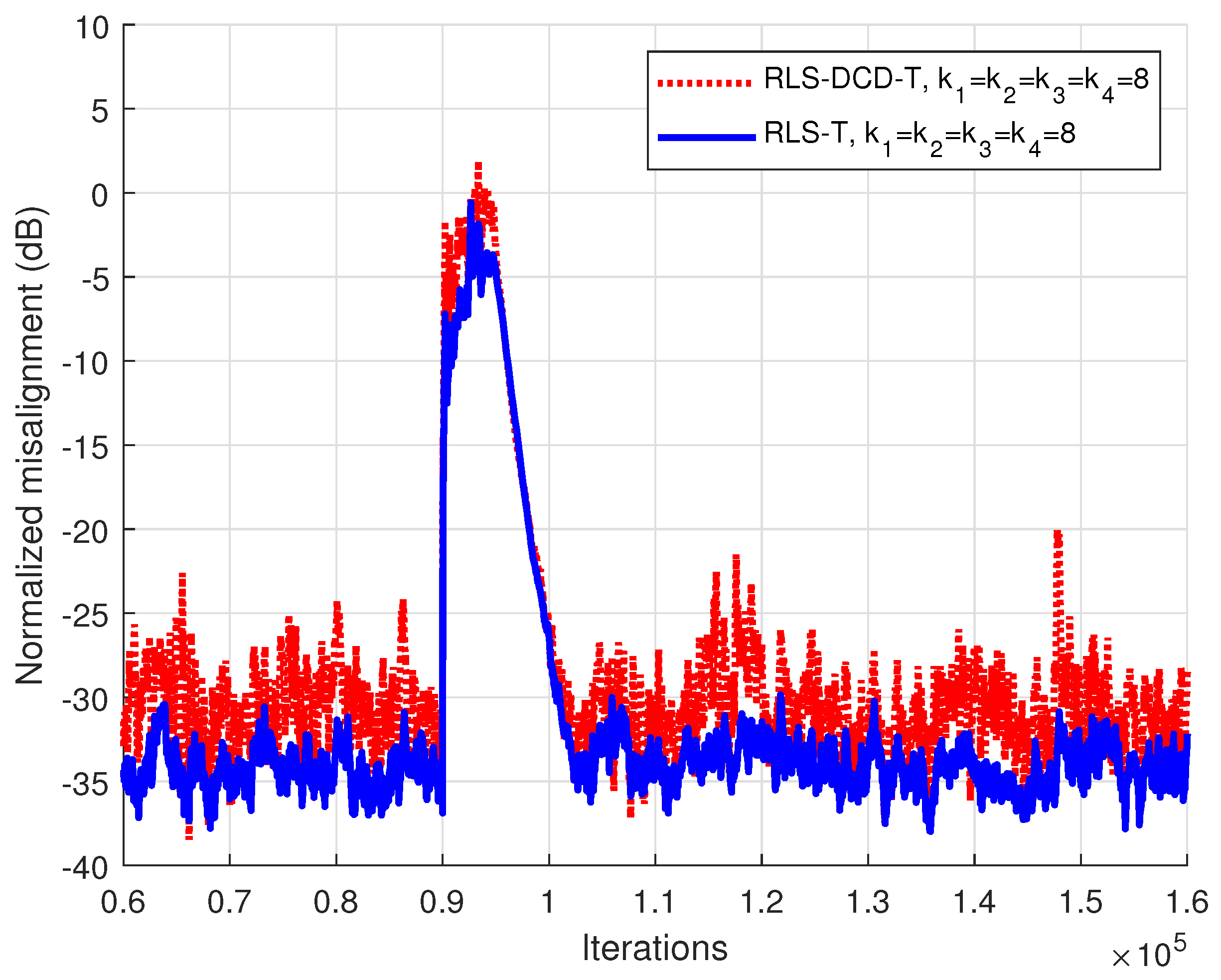
4. Simulations and Practical Considerations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Andrzej, C.; Rafal, Z.; Anh, H.P.; Shun-ichi, A. Nonnegative Matrix and Tensor Factorizations: Applications to Exploratory Multi-Way Data Analysis and Blind Source Separation; John Wiley and Sons, Ltd.: Hoboken, NJ, USA, 2009. [Google Scholar]
- Boussé, M.; Debals, O.; De Lathauwer, L. A Tensor-Based Method for Large-Scale Blind Source Separation Using Segmentation. IEEE Trans. Signal Process. 2017, 65, 346–358. [Google Scholar] [CrossRef]
- Ribeiro, L.N.; de Almeida, A.L.F.; Mota, J.C.M. Separable linearly constrained minimum variance beamformers. Signal Process. 2019, 158, 15–25. [Google Scholar] [CrossRef]
- Cichocki, A.; Mandic, D.; De Lathauwer, L.; Zhou, G.; Zhao, Q.; Caiafa, C.; Phan, H.A. Tensor Decompositions for Signal Processing Applications: From two-way to multiway component analysis. IEEE Signal Process. Mag. 2015, 32, 145–163. [Google Scholar] [CrossRef] [Green Version]
- Sidiropoulos, N.D.; De Lathauwer, L.; Fu, X.; Huang, K.; Papalexakis, E.E.; Faloutsos, C. Tensor Decomposition for Signal Processing and Machine Learning. IEEE Trans. Signal Process. 2017, 65, 3551–3582. [Google Scholar] [CrossRef]
- Da Costa, M.N.; Favier, G.; Romano, J.M.T. Tensor modelling of MIMO communication systems with performance analysis and Kronecker receivers. Signal Process. 2018, 145, 304–316. [Google Scholar] [CrossRef] [Green Version]
- Rugh, W. Nonlinear System Theory: The Volterra/Wiener Approach. 1981. Available online: https://www.jstor.org/stable/2029400 (accessed on 14 September 2021).
- Dogariu, L.M.; Ciochină, S.; Paleologu, C.; Benesty, J.; Oprea, C. An Iterative Wiener Filter for the Identification of Multilinear Forms. In Proceedings of the 2020 43rd International Conference on Telecommunications and Signal Processing (TSP), Milan, Italy, 7–9 July 2020; pp. 193–197. [Google Scholar] [CrossRef]
- Dogariu, L.M.; Ciochină, S.; Benesty, J.; Paleologu, C. An Iterative Wiener Filter for the Identification of Trilinear Forms. In Proceedings of the 2019 42nd International Conference on Telecommunications and Signal Processing (TSP), Budapest, Hungary, 1–3 July 2019; pp. 88–93. [Google Scholar] [CrossRef]
- Fîciu, I.D.; Stanciu, C.; Anghel, C.; Paleologu, C.; Stanciu, L. Combinations of Adaptive Filters within the Multilinear Forms. In Proceedings of the 2021 International Symposium on Signals, Circuits and Systems (ISSCS), Iasi, Romania, 15–16 July 2021; pp. 1–4. [Google Scholar] [CrossRef]
- Dogariu, L.M.; Stanciu, C.L.; Elisei-Iliescu, C.; Paleologu, C.; Benesty, J.; Ciochină, S. Tensor-Based Adaptive Filtering Algorithms. Symmetry 2021, 13, 481. [Google Scholar] [CrossRef]
- Dogariu, L.M.; Paleologu, C.; Benesty, J.; Oprea, C.; Ciochină, S. LMS Algorithms for Multilinear Forms. In Proceedings of the 2020 International Symposium on Electronics and Telecommunications (ISETC), Timisoara, Romania, 5–6 November 2020; pp. 1–4. [Google Scholar] [CrossRef]
- Dogariu, L.M.; Ciochină, S.; Benesty, J.; Paleologu, C. System Identification Based on Tensor Decompositions: A Trilinear Approach. Symmetry 2019, 11, 556. [Google Scholar] [CrossRef] [Green Version]
- Haykin, S. Adaptive Filter Theory, 4th ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Elisei-Iliescu, C.; Paleologu, C.; Benesty, J.; Stanciu, C.; Anghel, C.; Ciochină, S. A Multichannel Recursive Least-Squares Algorithm Based on a Kronecker Product Decomposition. In Proceedings of the 2020 43rd International Conference on Telecommunications and Signal Processing (TSP), Milan, Italy, 7–9 July 2020; pp. 14–18. [Google Scholar] [CrossRef]
- Cioffi, J.; Kailath, T. Fast, recursive-least-squares transversal filters for adaptive filtering. IEEE Trans. Acoust. Speech Signal Process. 1984, 32, 304–337. [Google Scholar] [CrossRef]
- Stanciu, C.; Ciochină, S. A robust dual-path DCD-RLS algorithm for stereophonic acoustic echo cancellation. In Proceedings of the International Symposium on Signals, Circuits and Systems ISSCS2013, Iasi, Romania, 11–12 July 2013; pp. 1–4. [Google Scholar] [CrossRef]
- Stanciu, C.; Anghel, C. Numerical properties of the DCD-RLS algorithm for stereo acoustic echo cancellation. In Proceedings of the 2014 10th International Conference on Communications (COMM), Bucharest, Romania, 29–31 May 2014; pp. 1–4. [Google Scholar] [CrossRef]
- Liu, J.; Zakharov, Y.V.; Weaver, B. Architecture and FPGA Design of Dichotomous Coordinate Descent Algorithms. IEEE Trans. Circuits Syst. Regul. Pap. 2009, 56, 2425–2438. [Google Scholar] [CrossRef]
- Zakharov, Y.V.; White, G.P.; Liu, J. Low-Complexity RLS Algorithms Using Dichotomous Coordinate Descent Iterations. IEEE Trans. Signal Process. 2008, 56, 3150–3161. [Google Scholar] [CrossRef] [Green Version]
- Stenger, A.; Kellermann, W. Adaptation of a memoryless preprocessor for nonlinear acoustic echo cancelling. Signal Process. 2000, 80, 1747–1760. [Google Scholar] [CrossRef]
- Huang, Y.; Skoglund, J.; Luebs, A. Practically efficient nonlinear acoustic echo cancellers using cascaded block RLS and FLMS adaptive filters. In Proceedings of the 2017 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), New Orleans, LA, USA, 5–9 March 2017; pp. 596–600. [Google Scholar] [CrossRef]
- Benesty, J.; Cohen, I.; Chen, J. Array Processing–Kronecker Product Beamforming; Springer: Cham, Switzerland, 2019. [Google Scholar]
- Benesty, J.; Paleologu, C.; Ciochină, S. On the Identification of Bilinear Forms with the Wiener Filter. IEEE Signal Process. Lett. 2017, 24, 653–657. [Google Scholar] [CrossRef]
- Bertsekas, D. Nonlinear Programming; Athena Scientific: Belmont, MA, USA, 1999. [Google Scholar]
- Elisei-Iliescu, C.; Dogariu, L.M.; Paleologu, C.; Benesty, J.; Enescu, A.A.; Ciochină, S. A Recursive Least-Squares Algorithm for the Identification of Trilinear Forms. Algorithms 2020, 13, 135. [Google Scholar] [CrossRef]
- Stanciu, C.; Benesty, J.; Paleologu, C.; Gänsler, T.; Ciochină, S. A widely linear model for stereophonic acoustic echo cancellation. Signal Process. 2013, 93, 511–516. [Google Scholar] [CrossRef]
- Digital Network Echo Cancellers. ITU-T Recommendations G.168. Available online: https://www.itu.int/rec/T-REC-G.168/en (accessed on 21 August 2021).
- Stanciu, C.; Anghel, C.; Stanciu, L. Efficient FPGA implementation of the DCD-RLS algorithm for stereo acoustic echo cancellation. In Proceedings of the 2015 International Symposium on Signals, Circuits and Systems (ISSCS), Iasi, Romania, 9–10 July 2015; pp. 1–4. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fîciu, I.-D.; Stanciu, C.-L.; Anghel, C.; Elisei-Iliescu, C. Low-Complexity Recursive Least-Squares Adaptive Algorithm Based on Tensorial Forms. Appl. Sci. 2021, 11, 8656. https://doi.org/10.3390/app11188656
Fîciu I-D, Stanciu C-L, Anghel C, Elisei-Iliescu C. Low-Complexity Recursive Least-Squares Adaptive Algorithm Based on Tensorial Forms. Applied Sciences. 2021; 11(18):8656. https://doi.org/10.3390/app11188656
Chicago/Turabian StyleFîciu, Ionuț-Dorinel, Cristian-Lucian Stanciu, Cristian Anghel, and Camelia Elisei-Iliescu. 2021. "Low-Complexity Recursive Least-Squares Adaptive Algorithm Based on Tensorial Forms" Applied Sciences 11, no. 18: 8656. https://doi.org/10.3390/app11188656
APA StyleFîciu, I.-D., Stanciu, C.-L., Anghel, C., & Elisei-Iliescu, C. (2021). Low-Complexity Recursive Least-Squares Adaptive Algorithm Based on Tensorial Forms. Applied Sciences, 11(18), 8656. https://doi.org/10.3390/app11188656