
Dynamics of the Vibration System Driven by Three Homodromy Eccentric Rotors Using Control Synchronization


Abstract
:1. Introduction
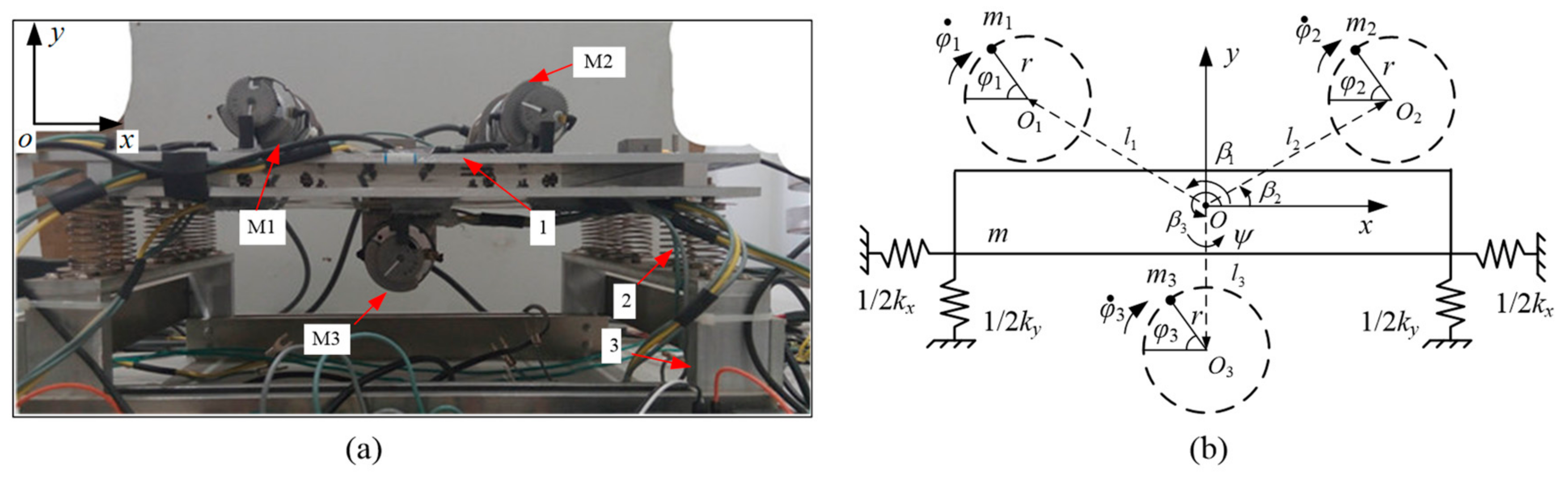
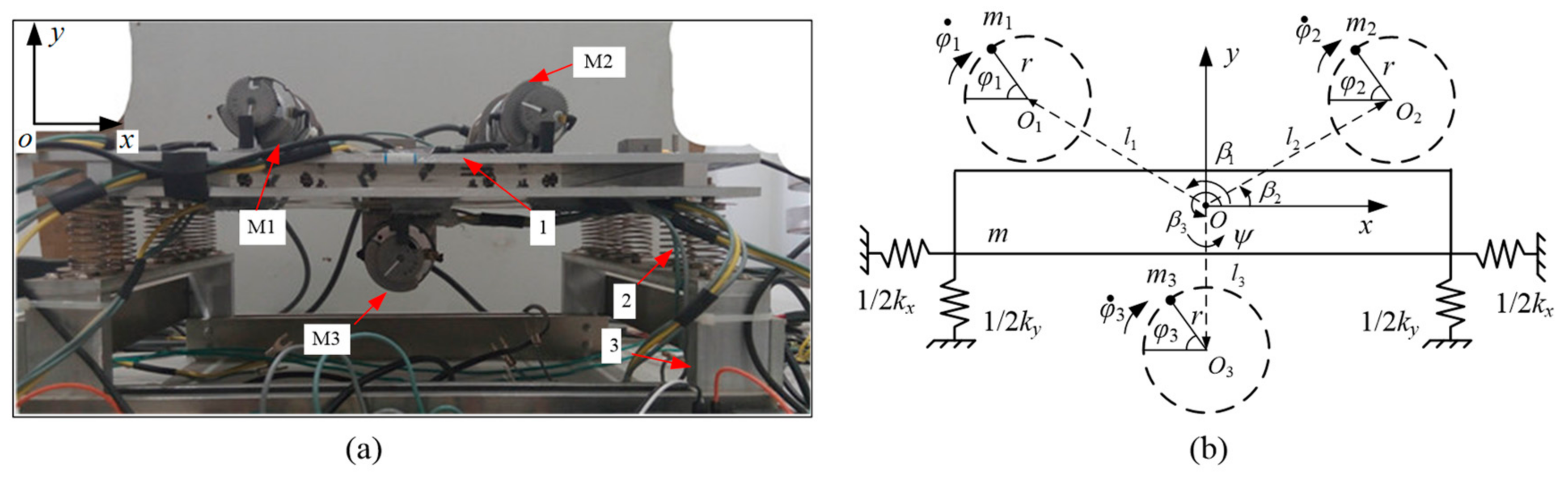
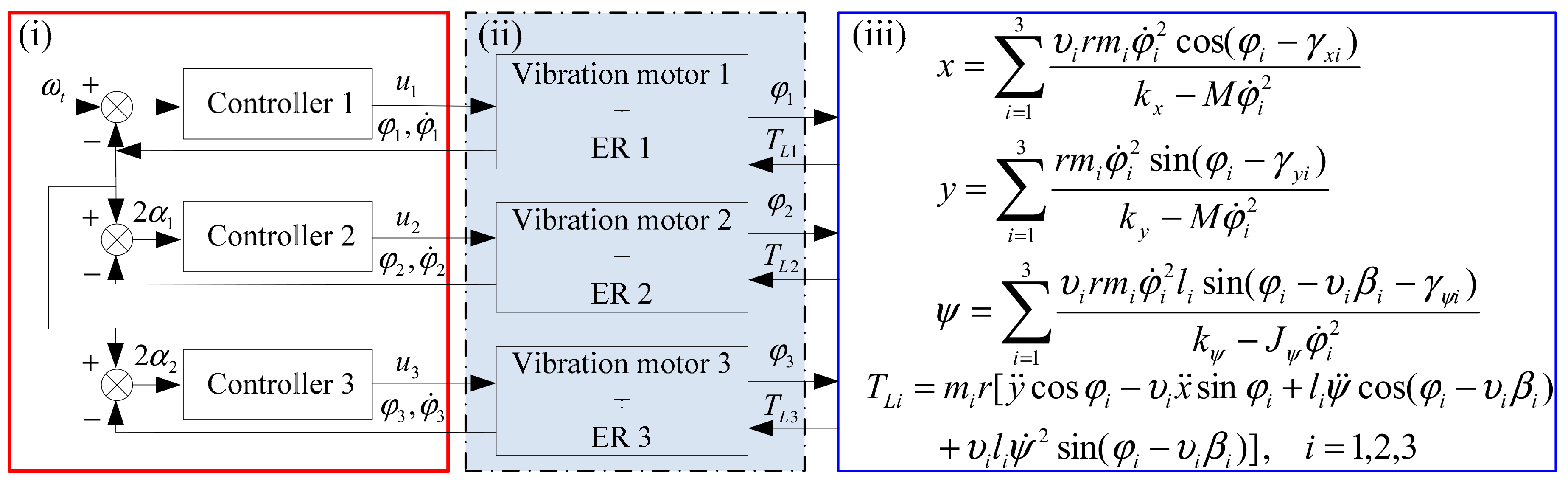
2. Dynamic Model of the Vibration System
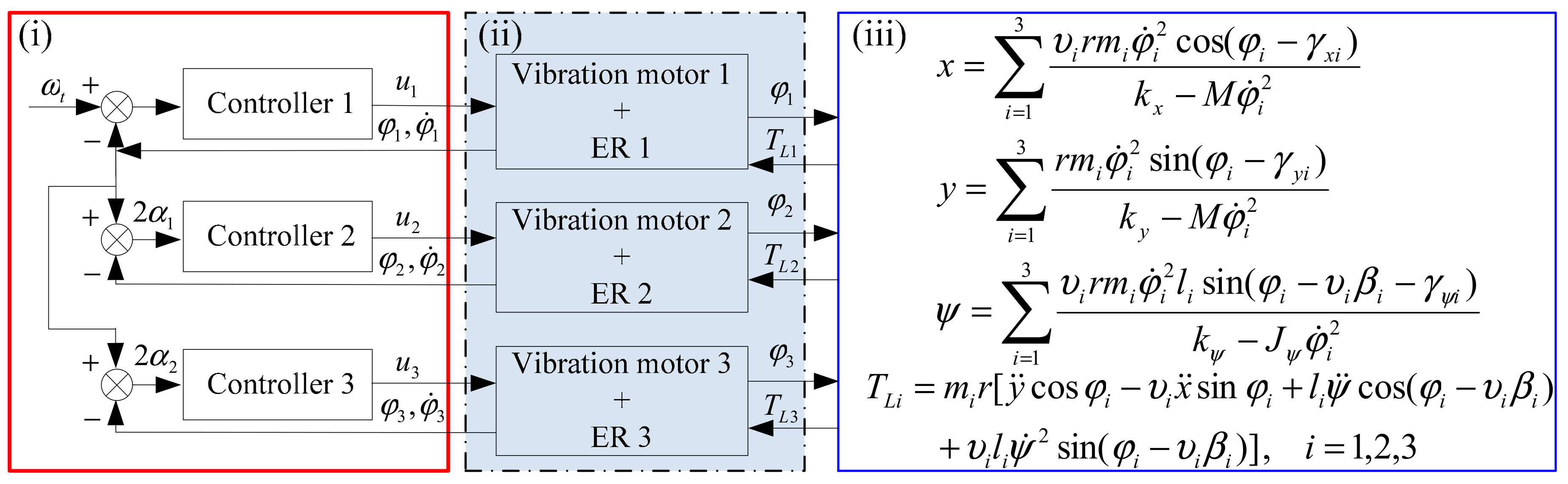
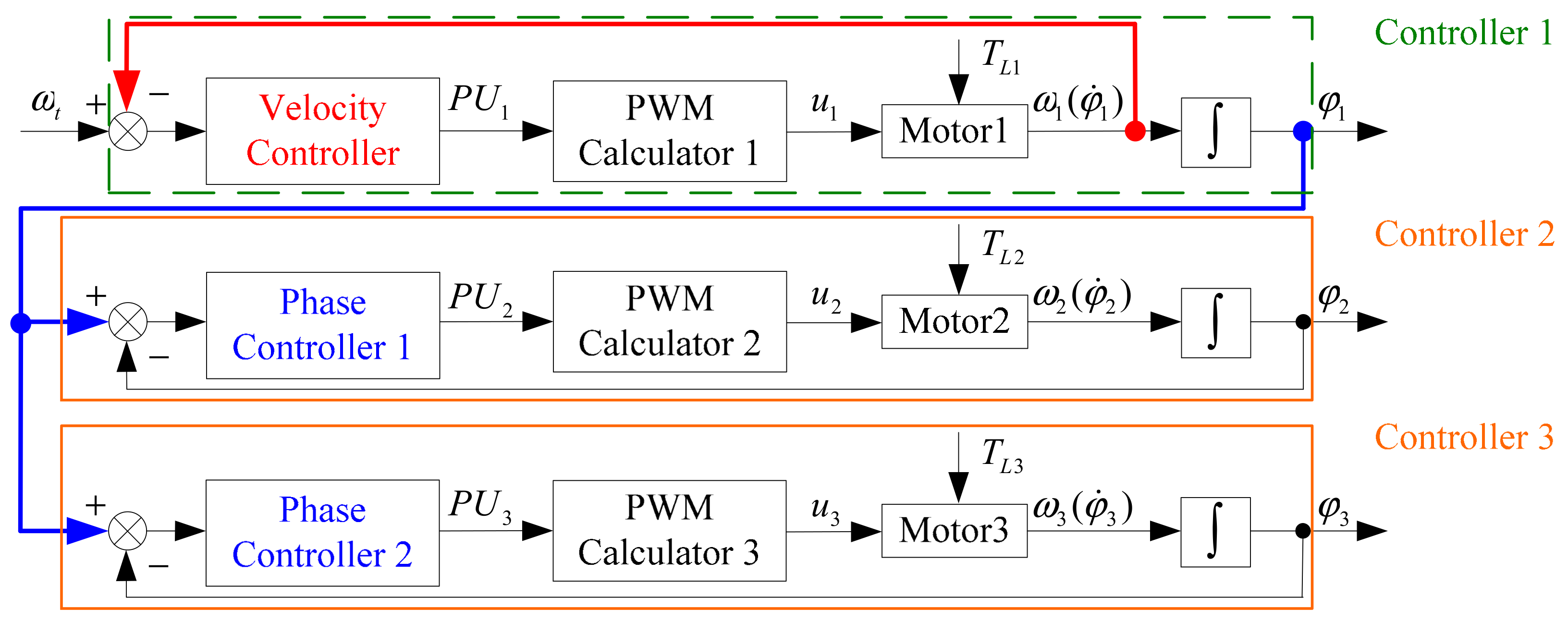
3. Control Synchronization
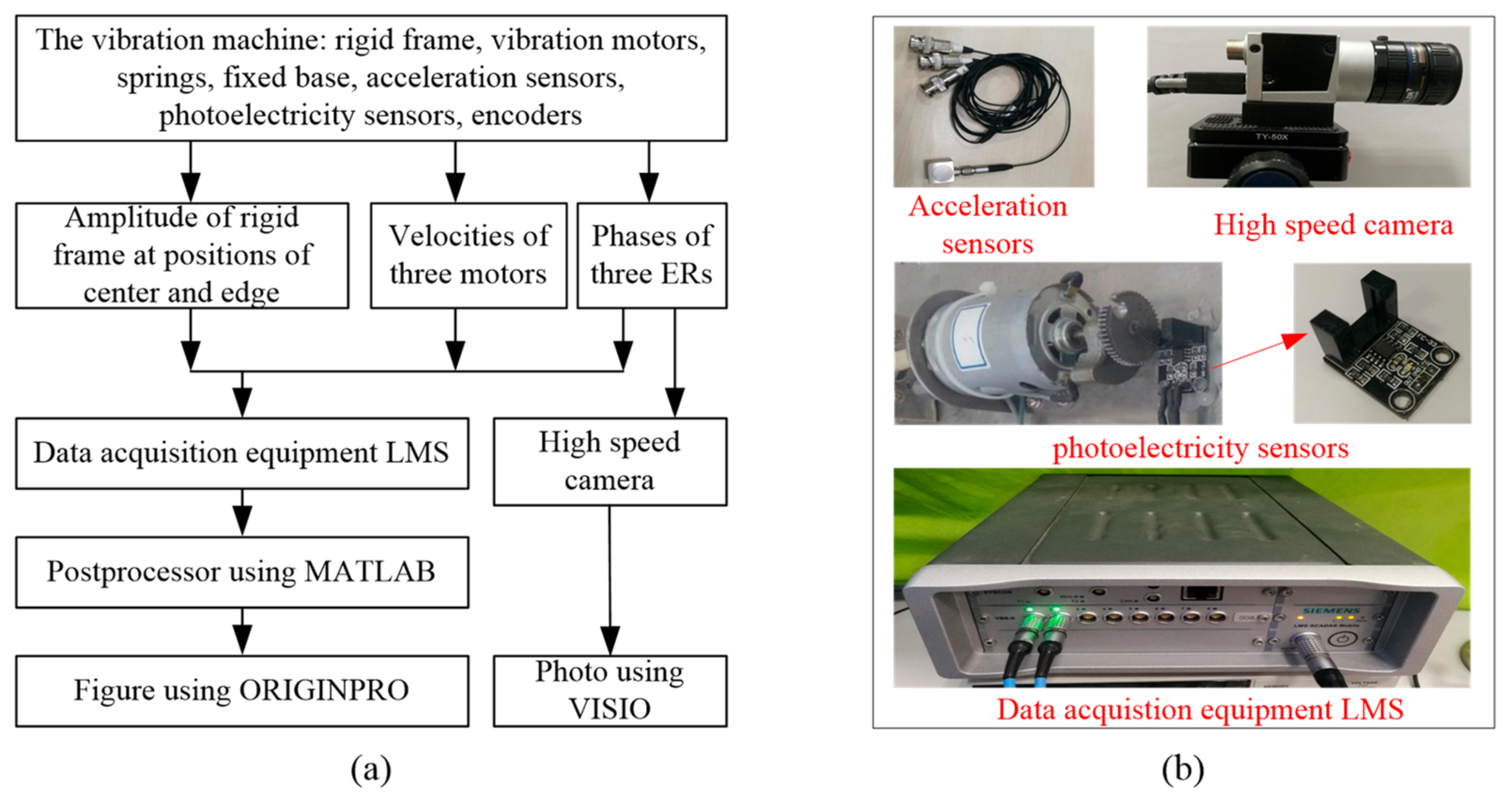
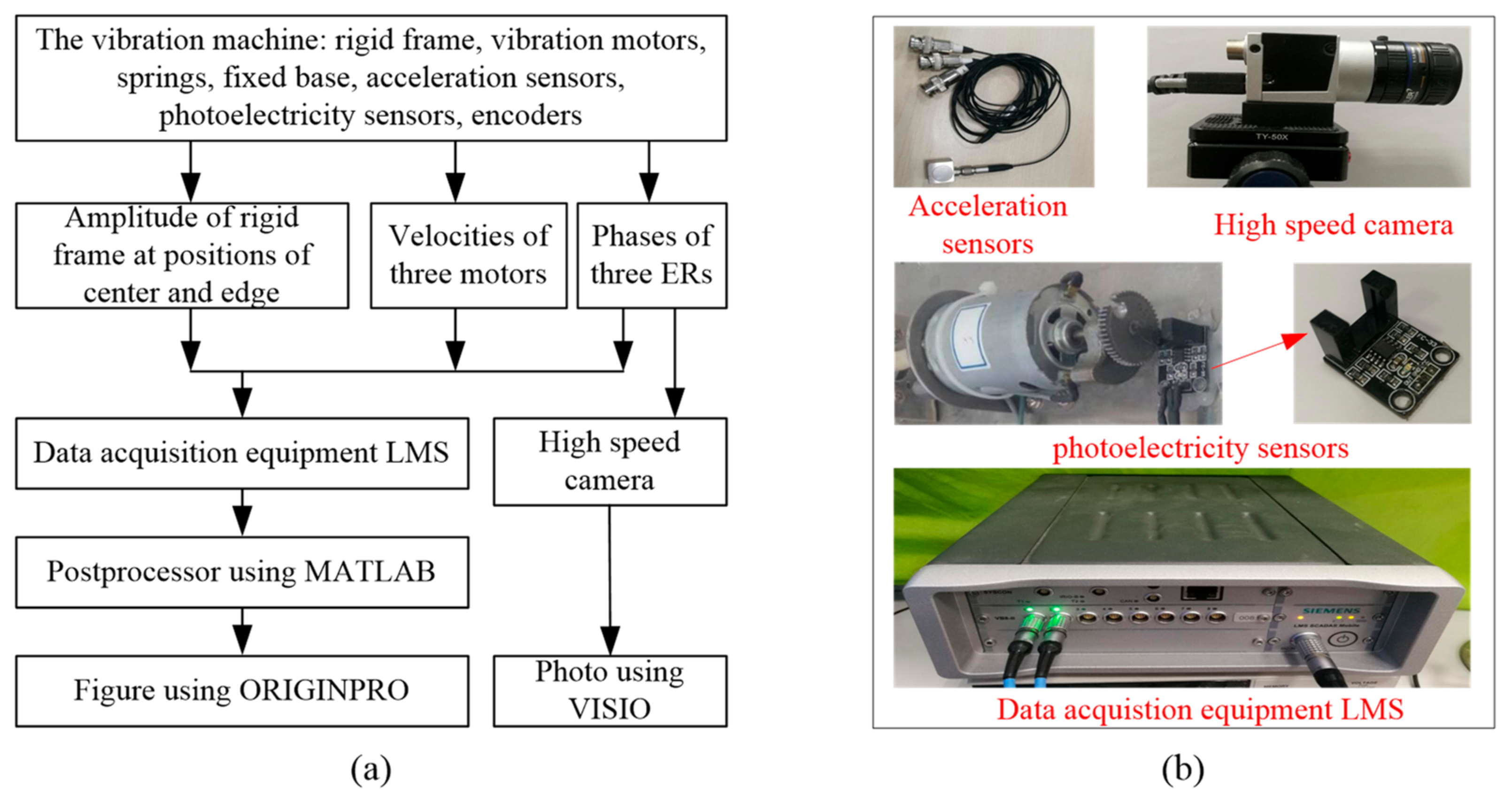
4. Experimental Design of the Control System
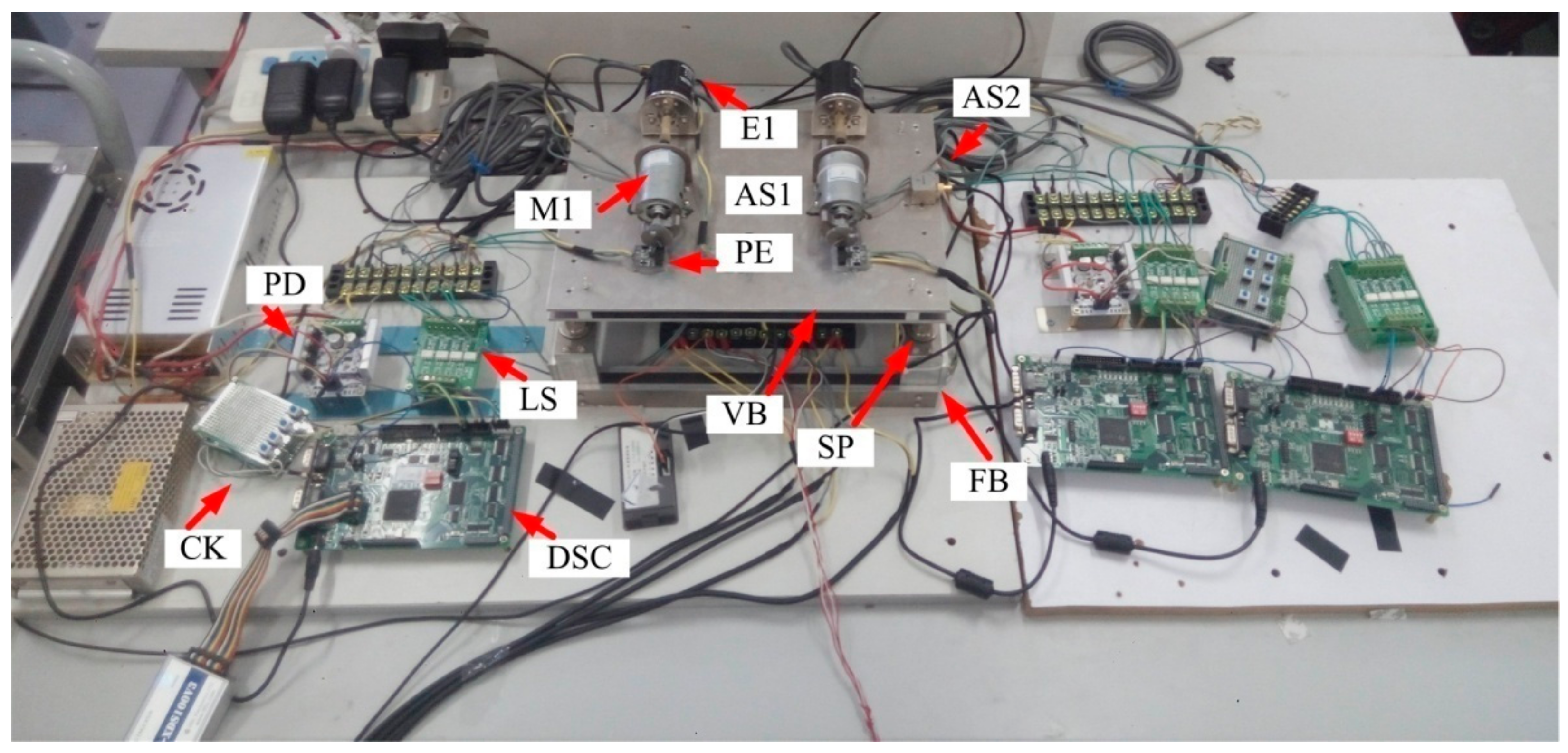
4.1. Hardware Scheme of the Control System
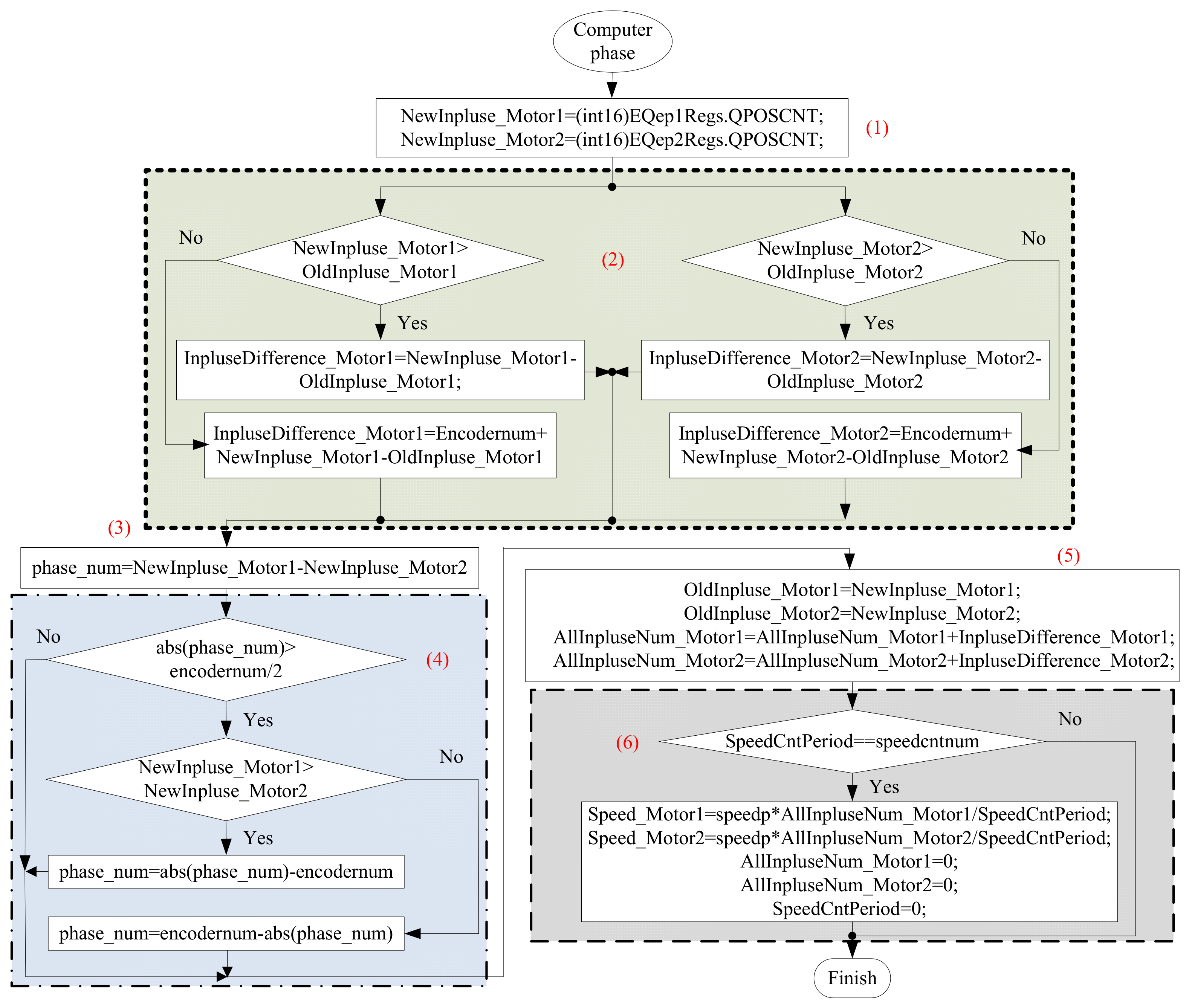
4.2. Algorithm of Velocity and the Phase Difference
5. Results and Discussion
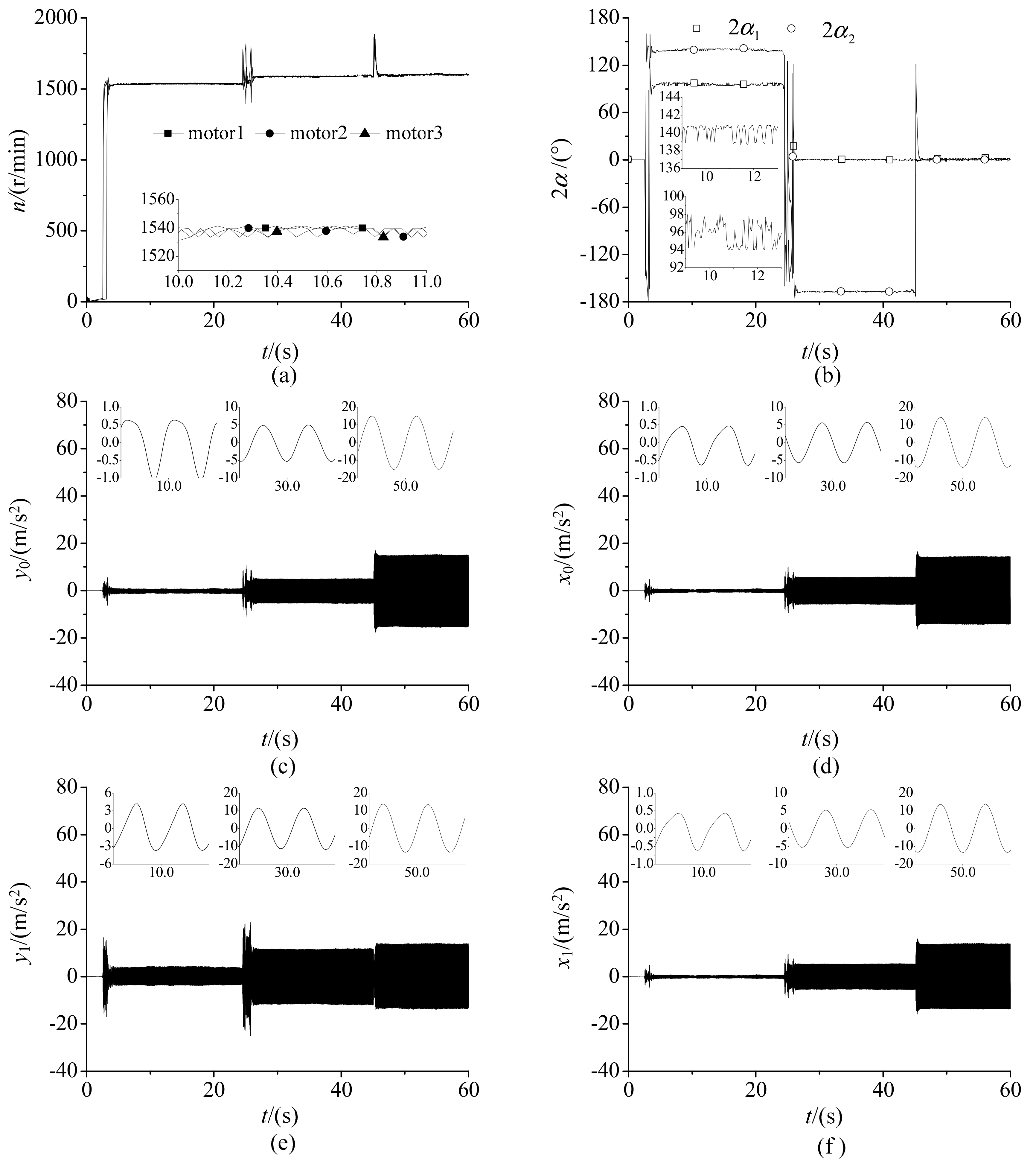
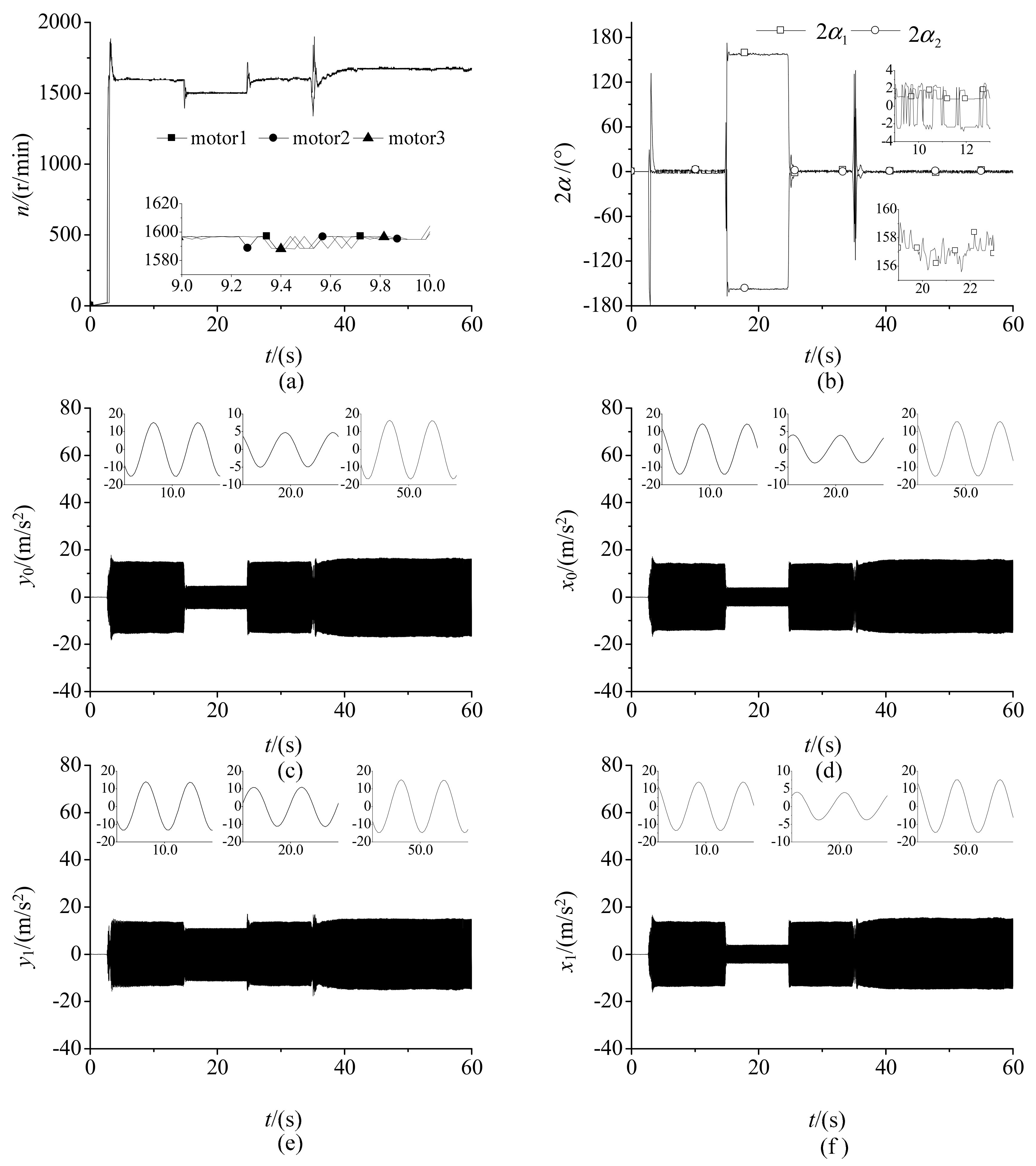
5.1. Vibration Synchronization and Control Synchronization
5.1.1. Numerical Results
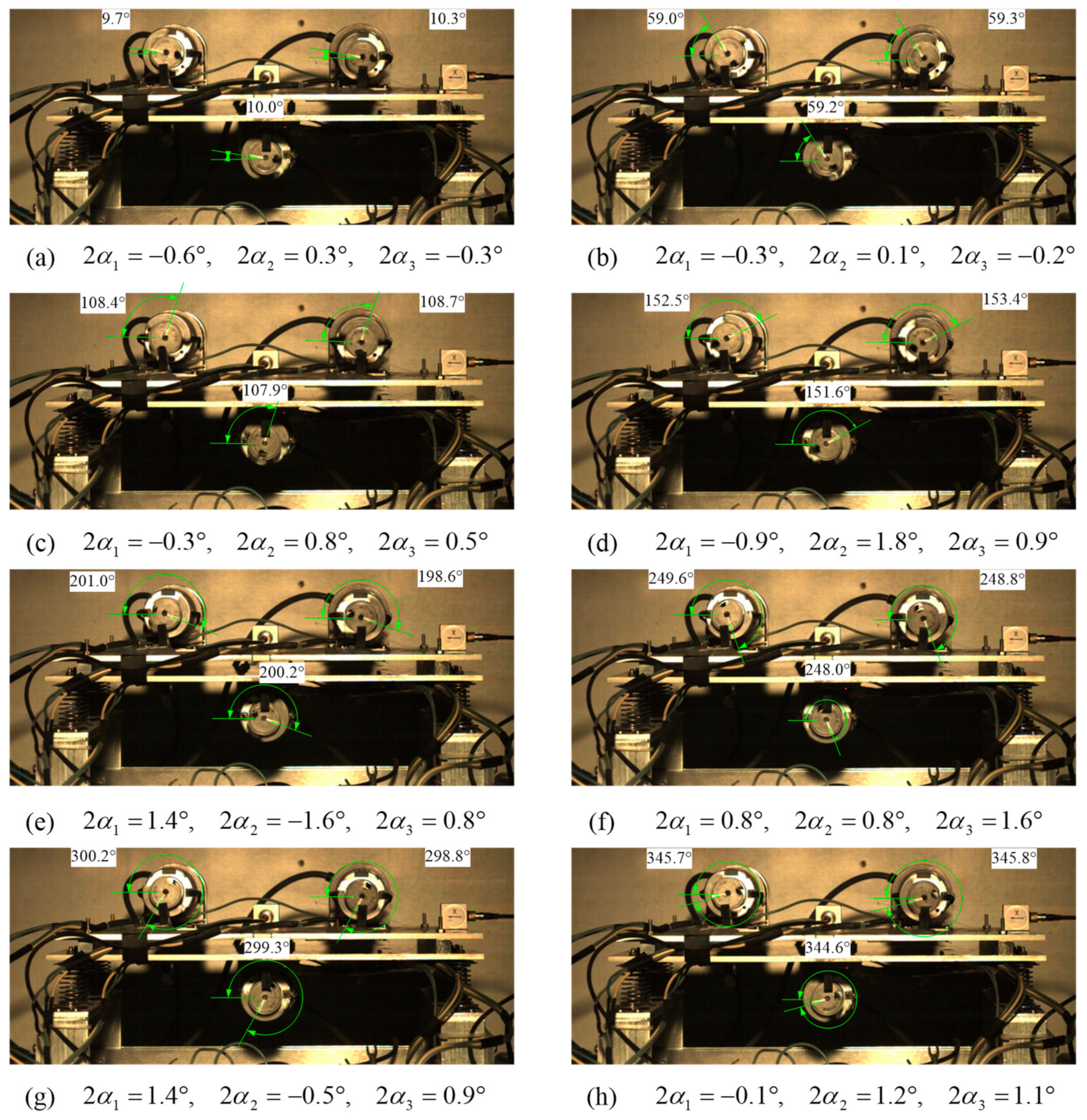
5.1.2. Experimental Results
5.2. Control Synchronization of Two Control Schemes
5.3. Control Synchronization of Changing Velocity
6. Conclusions
- To achieve the ideal motion of the vibration system, the control target of this underactuated system is converted into velocity and phase tracking of three motors from a dynamical perspective. The velocity and phase controllers are designed by employing discrete-time sliding mode control. Considering the dynamic coupling characteristic of the self-adjusting of the vibration system, a method of calculating velocity and the phase difference is proposed to provide data for controllers, which combines experimental conditions.
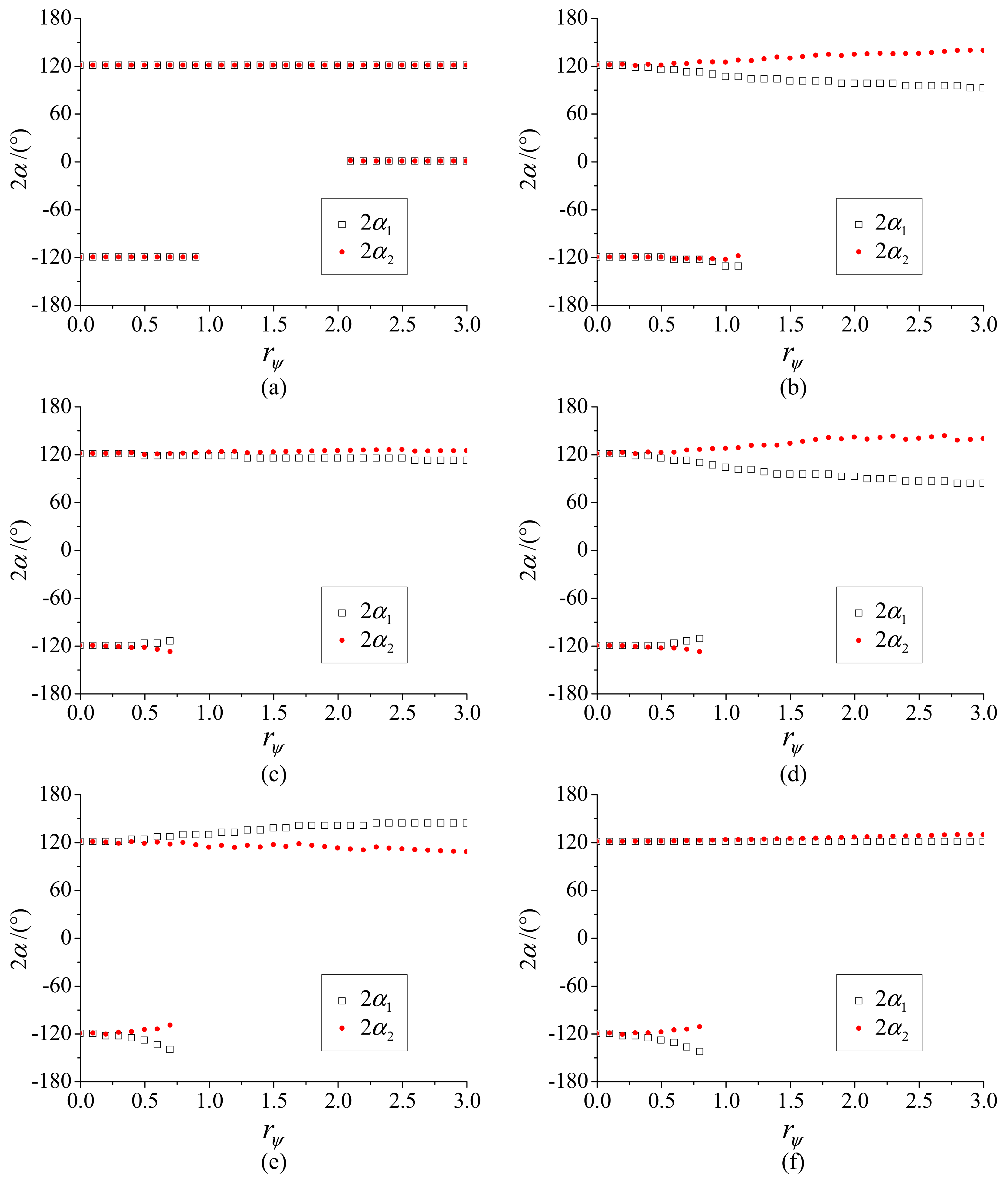
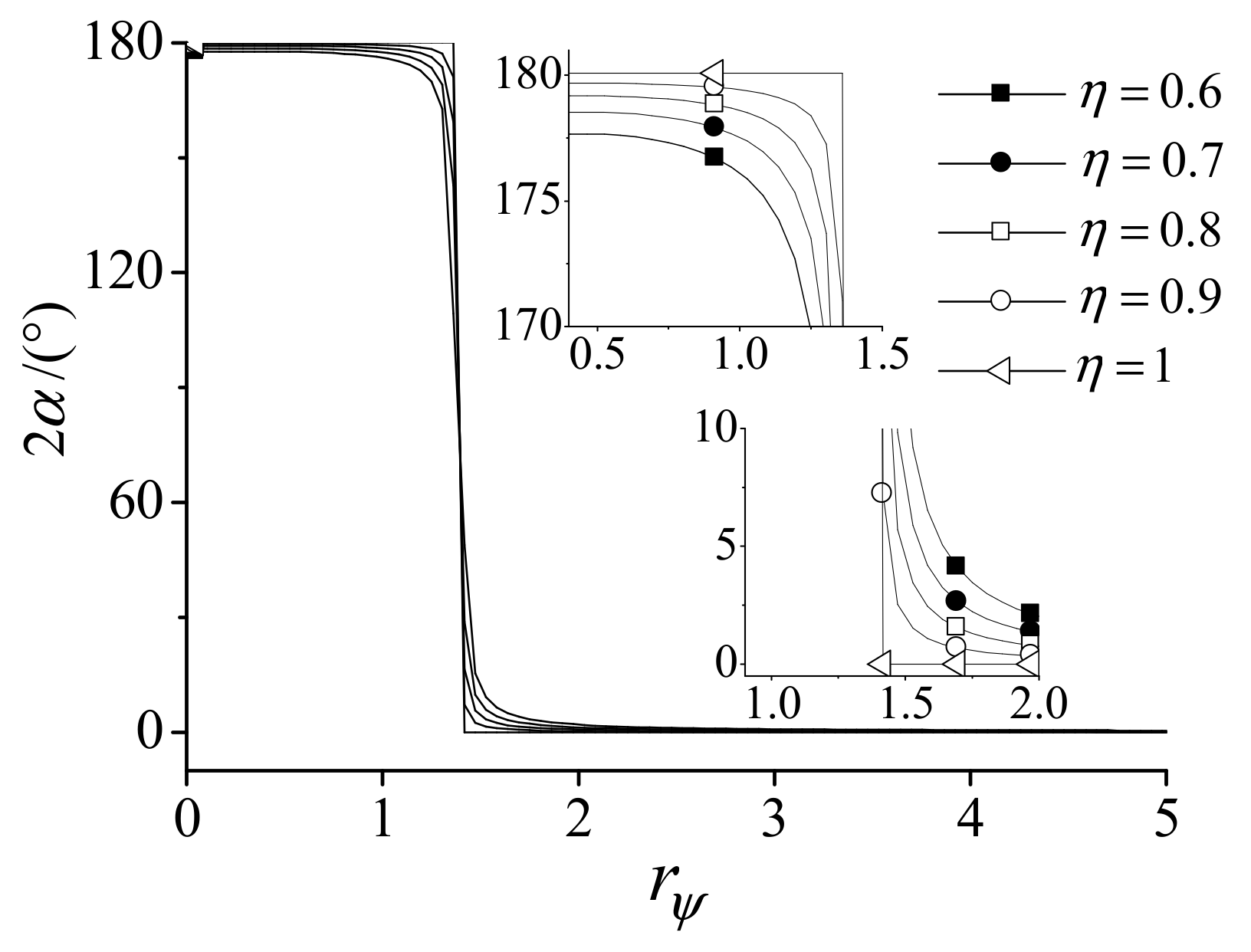
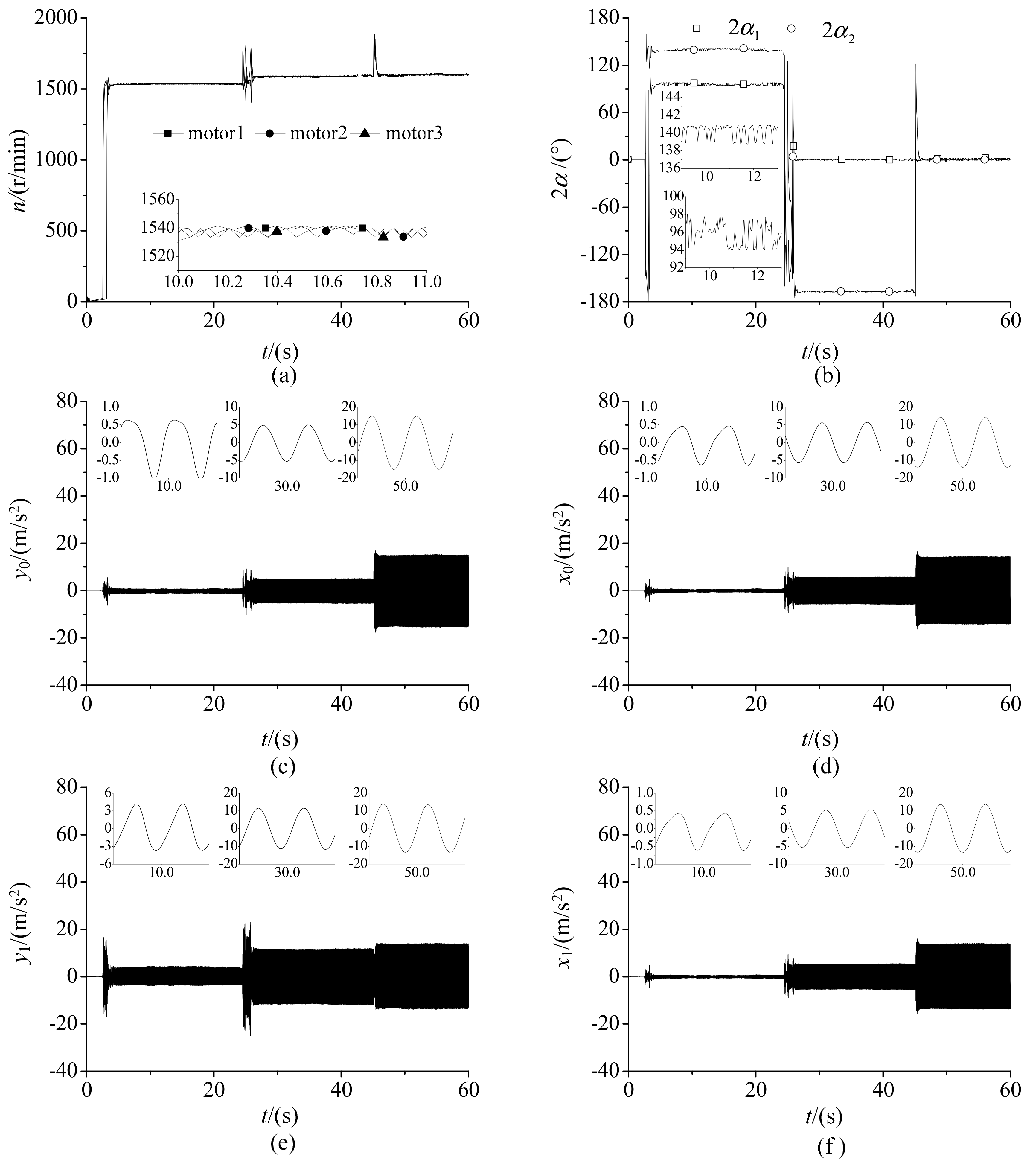
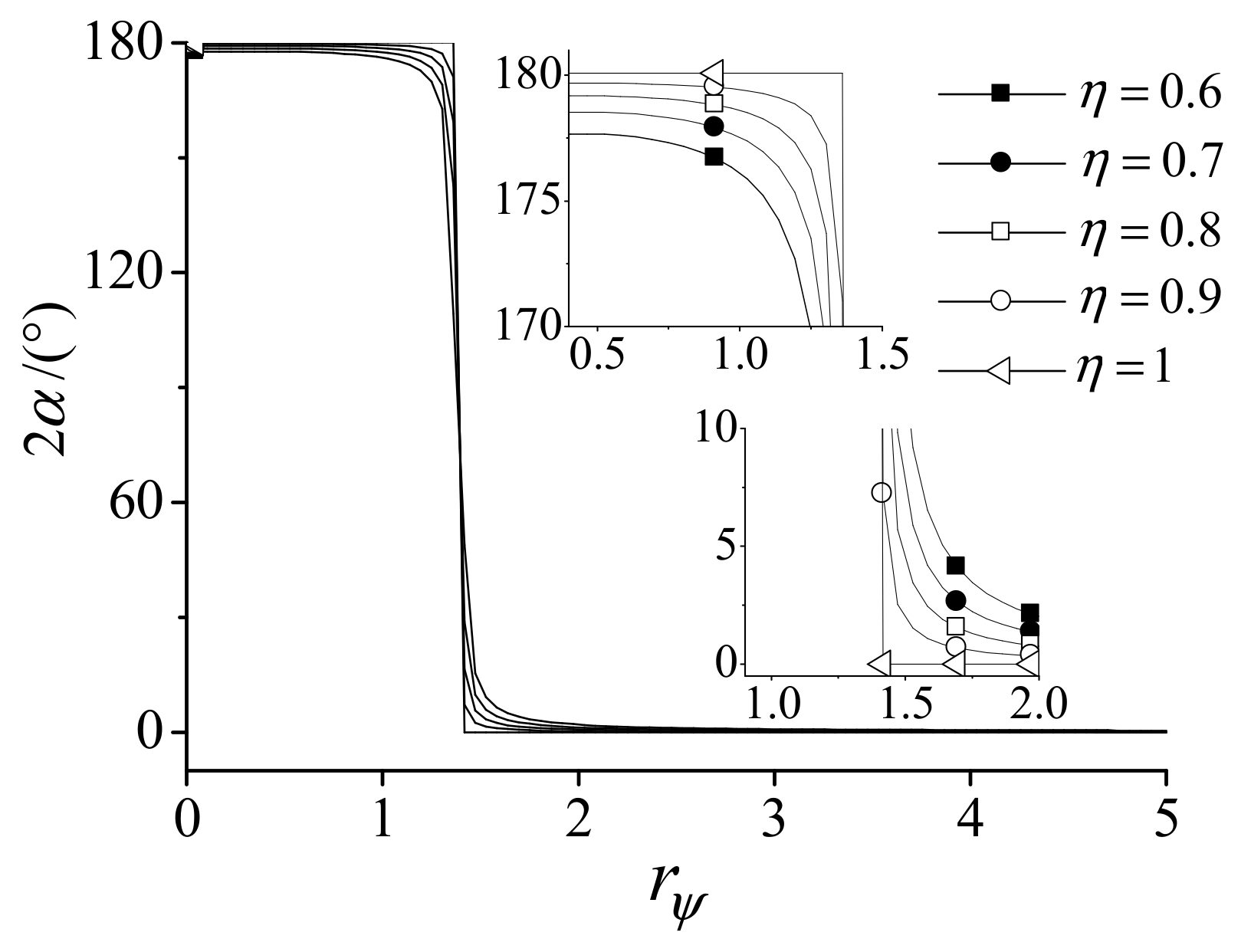
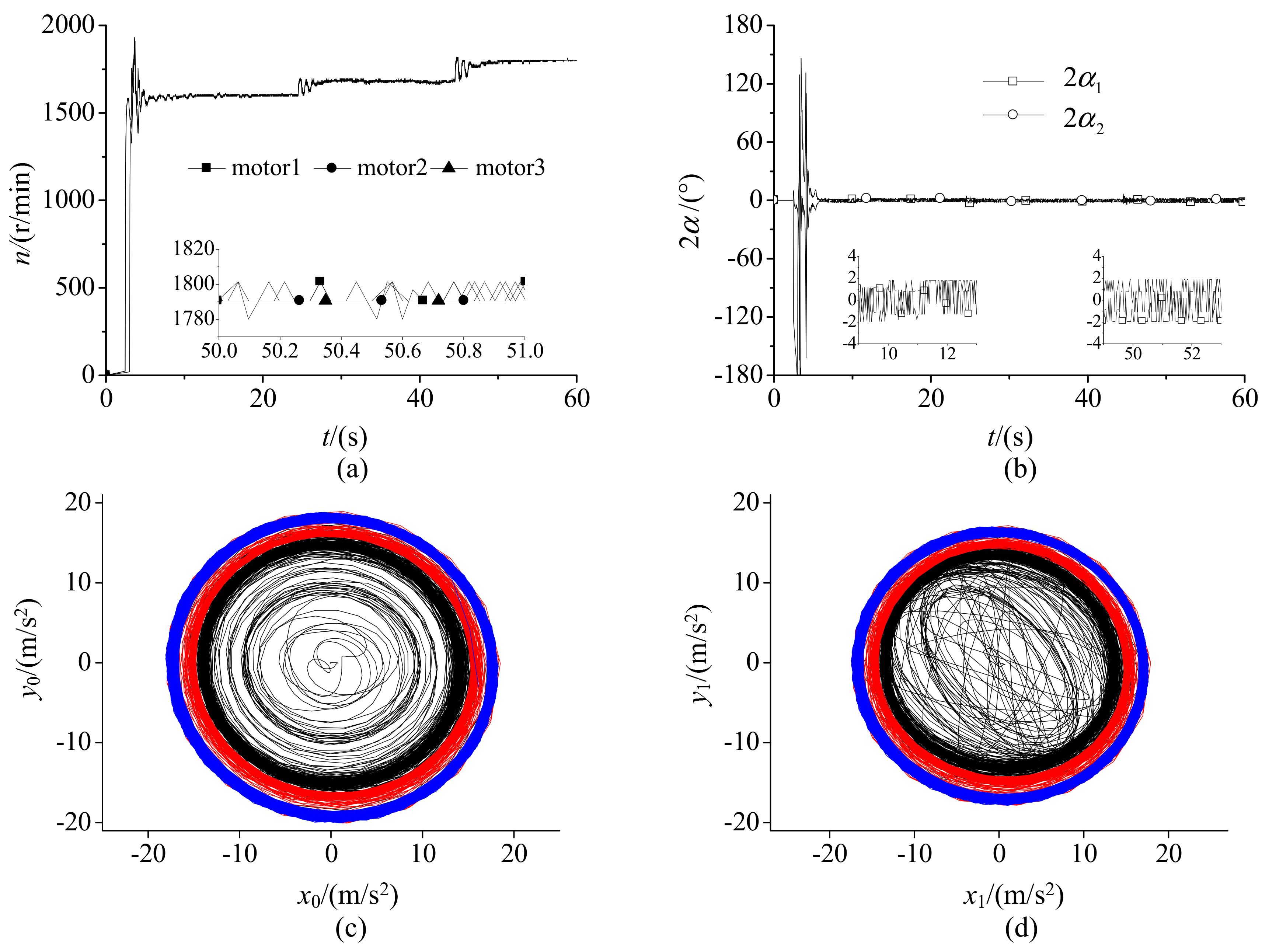
- The essence of control synchronization is the phase tracking between the master motor and slave motors at the same rotational velocity. According to the synchronous condition and the stability condition, we conclude that the absolution phase differences of three ERs approach . when the system runs in the vibration synchronization. Furthermore, when two-thirds of motors adopt the control synchronization, the absolution phase difference between the master motor and the slave motor without control approaches .
- If the master motor is the leading phase ER, the synchronous velocity will rise because of the tracking of other slave motors. By contrast, if the master motor is the lagging phase ERs, the synchronous velocity will drop because the slave motor is waiting for the master motor to track it. Of course, if the master motor adopts the velocity controller, this phenomenon of changing synchronous velocity does not appear.
- According to the velocity controller and phase controller, the control strategy is divided into two control schemes: controlling only salve motors and controlling all motors. Based on two control schemes, three experiments are achieved to study the dynamic coupling characteristic of the vibration system in control synchronization. The experimental results show that control synchronization is an effective and feasible way to achieve the zero phase difference of three ERs. In addition, the method of control synchronization should be introduced to vibration machines to replace the method of forced synchronization.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Balthazar, J.M.; Felix, J.L.P.; Brasil, R. Short comments on self-synchronization of two non-ideal sources supported by a flexible portal frame structure. J. Vib. Control 2004, 10, 1739–1748. [Google Scholar] [CrossRef]
- Blekhman, I.I.; Fradkov, A.L.; Nijmeijer, H.; Pogromsky, A.Y. On self-synchronization and controlled synchronization. Syst. Control Lett. 1997, 31, 299–305. [Google Scholar] [CrossRef] [Green Version]
- Djanan, A.A.N.; Nbendjo, B.R.N.; Woafo, P. Self-synchronization of two motors on a rectangular plate and reduction of vibration. J. Vib. Control 2015, 21, 2114–2123. [Google Scholar] [CrossRef]
- Koluda, P.; Perlikowski, P.; Czolczynski, K.; Kapitaniak, T. Synchronization configurations of two coupled double pendula. Commun. Nonlinear Sci. 2014, 19, 977–990. [Google Scholar] [CrossRef]
- Miklos, A.; Szabo, Z. Simulation and experimental validation of the dynamical model of a dual-rotor vibrotactor. J. Sound Vib. 2015, 334, 98–107. [Google Scholar] [CrossRef] [Green Version]
- Sado, D. Nonlinear dynamics of a non-ideal autoparametric system with MR damper. Shock. Vib. 2013, 20, 1065–1072. [Google Scholar] [CrossRef]
- Fang, P.; Hou, Y.; Dai, L.; Du, M. Theoretical Study of Synchronous Behavior in a Dual-Pendulum-Rotor System. Shock. Vib. 2018, 2018, 9824631. [Google Scholar] [CrossRef]
- Zhao, C.; Zhu, H.; Wang, R.; Wen, B. Synchronization of two non-identical coupled exciters in a non-resonant vibrating system of linear motion. Part I: Theoretical analysis. Shock. Vib. 2009, 16, 505–515. [Google Scholar] [CrossRef]
- Blekhman, I.I.; Fradkov, A.L.; Tomchina, O.P.; Bogdanov, D.E. Self-synchronization and controlled synchronization: General definition and example design. Math. Comput. Simul. 2002, 58, 367–384. [Google Scholar] [CrossRef]
- Zhao, C.; Zhu, H.; Zhang, Y.; Wen, B. Synchronization of two coupled exciters in a vibrating system of spatial motion. Acta Mech. Sin. 2010, 26, 477–493. [Google Scholar] [CrossRef]
- Zhang, X.L.; Zhao, C.Y.; Wen, B.C. Theoretical and experimental study on synchronization of the two homodromy exciters in a non-resonant vibrating system. Shock. Vib. 2013, 20, 327–340. [Google Scholar] [CrossRef]
- Chen, X.; Kong, X.; Zhang, X.; Li, L.; Wen, B. On the Synchronization of Two Eccentric Rotors with Common Rotational Axis: Theory and Experiment. Shock. Vib. 2016, 2016, 6973597. [Google Scholar] [CrossRef] [Green Version]
- Chen, X.; Kong, X.; Dou, J.; Liu, Y.; Wen, B. Numerical and experimental investigation on self-synchronization of two eccentric rotors in the vibration system. J. Vibroeng. 2016, 18, 744–758. [Google Scholar]
- Kong, X.; Chen, X.; Dou, J.; Zhang, X.; Wen, B. Controlled synchronization of two nonidentical homodromy coupling exciters driven by inductor motors in a vibratory system. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2016, 230, 3040–3054. [Google Scholar] [CrossRef]
- Chuang, C.-W.; Haung, C.-L.; Lee, C.-D.; Kao, C.-C.; Fung, R.-F. Synchronization and tension control of dual motor systems via MIMO discrete pseudo model following integral variable structure control. Mech Mach. Theory 2009, 44, 499–510. [Google Scholar] [CrossRef]
- Sencer, B.; Mori, T.; Shamoto, E. Design and application of a sliding mode controller for accurate motion synchronization of dual servo systems. Control Eng. Pract. 2013, 21, 1519–1530. [Google Scholar] [CrossRef]
- Chen, C.-S.; Chen, L.-Y. Robust Cross-Coupling Synchronous Control by Shaping Position Commands in Multiaxes System. IEEE Trans. Ind. Electron. 2012, 59, 4761–4773. [Google Scholar] [CrossRef]
- Zhao, D.Z.; Li, C.W.; Ren, J. Speed synchronisation of multiple induction motors with adjacent cross-coupling control. IET Control Theory Appl. 2010, 4, 119–128. [Google Scholar] [CrossRef]
- Lin, S.; Cai, Y.; Yang, B.; Zhang, W. Electrical line-shafting control for motor speed synchronisation using sliding mode controller and disturbance observer. IET Control Theory Appl. 2017, 11, 205–212. [Google Scholar] [CrossRef]
- Li, L.-B.; Sun, L.-L.; Zhang, S.-Z.; Yang, Q.-Q. Speed tracking and synchronization of multiple motors using ring coupling control and adaptive sliding mode control. ISA Trans. 2015, 58, 635–649. [Google Scholar] [CrossRef]
- Balthazar, J.M.; Tusset, A.M.; Brasil, R.M.L.R.F.; Felix, J.L.P.; Rocha, R.T.; Janzen, F.C.; Nabarrete, A.; Oliveira, C. An overview on the appearance of the Sommerfeld effect and saturation phenomenon in non-ideal vibrating systems (NIS) in macro and MEMS scales. Nonlinear Dyn. 2018, 93, 19–40. [Google Scholar] [CrossRef]
- Cheng, M.H.; Chen, C.-Y.; Bakhoum, E.G. Synchronization controller synthesis of multi-axis motion system. Int. J. Innov. Comput. Inf. Control 2011, 7, 4395–4410. [Google Scholar]
- Mao, Z.; Yuan, J.; Liu, Z. Research on Synchronous Control for Dual-Cylinder System with Unbalanced Loading. In Electrical Information and Mechatronics and Applications, Pts 1 and 2; Applied Mechanics and Materials; Wang, X.D., Xu, B.Y., Zhong, S.B., Eds.; Trans Tech Publications: Stafa-Zurich, Switzerland, 2012; Volume 143–144, pp. 53–57. [Google Scholar]
- Tomchina, O.; Kudryavtseva, I. Controlled Synchronization of Unbalanced Rotors with Flexible Shafts in Time-Varying Vibrational Units; IEEE Xplore: St. Petersburg, Russia, 2005; pp. 790–794. [Google Scholar]
- Lin, F.-J.; Chou, P.-H.; Chen, C.-S.; Lin, Y.-S. DSP-Based Cross-Coupled Synchronous Control for Dual Linear Motors via Intelligent Complementary Sliding Mode Control. IEEE Trans. Ind. Electron. 2012, 59, 1061–1073. [Google Scholar] [CrossRef]
- Jia, L.; Kong, X.; Zhang, J.; Liu, Y.; Wen, B. Multiple-Frequency Controlled Synchronization of Two Homodromy Eccentric Rotors in a Vibratory System. Shock. Vib. 2018, 2018, 4941357. [Google Scholar] [CrossRef]
- Fradkov, A.L.; Andrievsky, B.; Evans, R.J. Controlled synchronization under information constraints. Phys. Rev. E 2008, 78, 036210. [Google Scholar] [CrossRef] [Green Version]
- Eun, Y.; Kim, J.H.; Kim, K.; Cho, D.I. Discrete-time variable structure controller with a decoupled disturbance compensator and its application to a CNC servomechanism. IEEE Trans. Control Syst. Technol. 1999, 7, 414–423. [Google Scholar] [CrossRef]
- Gao, W.B.; Wang, Y.F.; Homaifa, A. Discrete-time variable-structure control-systems. IEEE Trans. Ind. Electron. 1995, 42, 117–122. [Google Scholar] [CrossRef]
- Ghabi, J.; Dhouibi, H. Discrete Time Sliding Mode Controller Using a Disturbance Compensator for Nonlinear Uncertain Systems. Int. J. Control Autom. Syst. 2018, 16, 1156–1164. [Google Scholar] [CrossRef]
- Liu, Y. Sliding Mode Control for A Class of Uncertain Discrete Switched Systems. Int. J. Control Autom. Syst. 2018, 16, 1716–1723. [Google Scholar] [CrossRef]
- Chen, X.; Kong, X.; Liu, Y.; Wen, B. Synchronization and coupling dynamic characteristics of a dual-rotors exciter. J. Vibroeng. 2016, 18, 3318–3328. [Google Scholar] [CrossRef]
- Chen, X.; Li, L. Selected synchronous state of the vibration system driven by three homodromy eccentric rotors. J. Low Freq. Noise Vib. Act. Control 2020, 39, 352–367. [Google Scholar] [CrossRef] [Green Version]
- Chen, X.; Li, L. Phase Synchronization Control of Two Eccentric Rotors in the Vibration System with Asymmetric Structure Using Discrete-Time Sliding Mode Control. Shock. Vib. 2019, 2019, 7481746. [Google Scholar] [CrossRef]
- Zhang, X.; Wen, B.; Zhao, C. Experimental investigation on synchronization of three co-rotating non-identical coupled exciters driven by three motors. J. Sound Vib. 2014, 333, 2898–2908. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Code | Designation | Application |
|---|---|---|
| DSC | Control platform | Velocity and phase control of motor |
| PD | Power-driven circuit | Supplying power for direct current motor |
| LS | Signal processing circuit | Processing signal of the encoder |
| CK | Keyboard | Receiving order |
| PE | Photoelectric sensor | Measuring motor speed and the phase difference |
| E1 | Encoder | Providing motor phase signal to control board |
| AS1 | Acceleration sensor(accelerometer) | Measuring the acceleration amplitude of the body |
| M1 | DC vibration motor | Driven ER |
| VB | Vibration frame | Fixed motor |
| SP | Spring | Connecting vibration frame and fixed base |
| FB | Fixed base | Supporting vibration frame and spring |
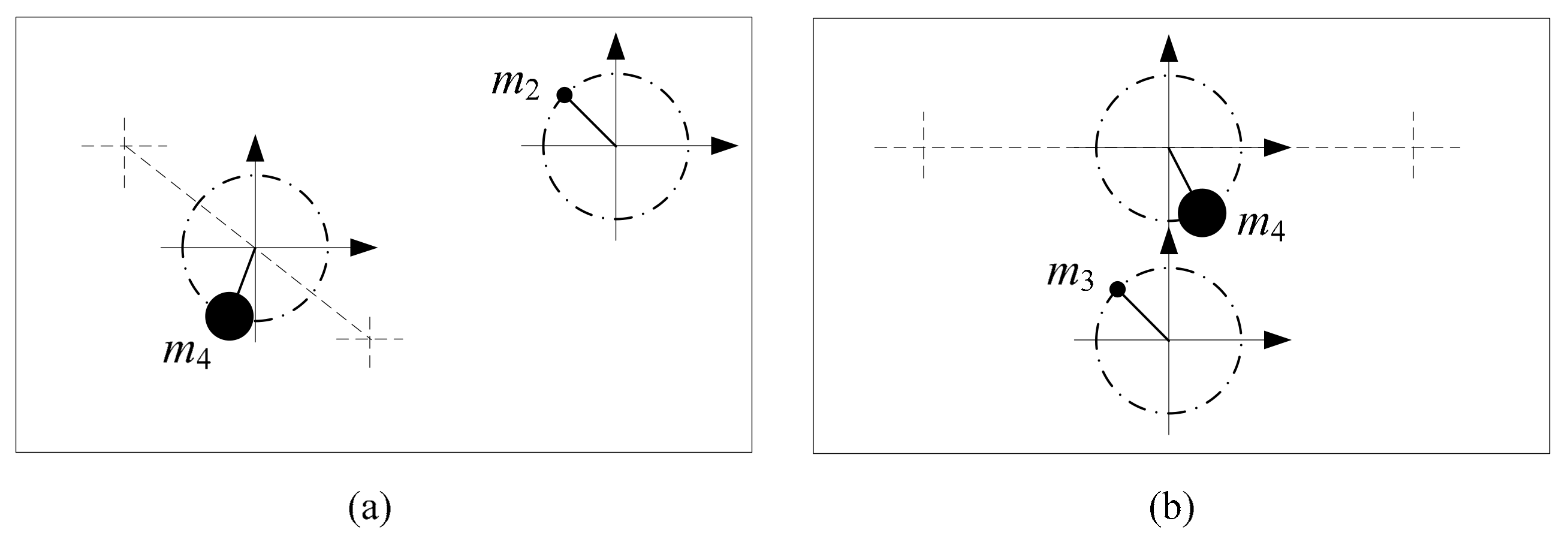
| Case | ER 2 in 1st and 4th Quadrants | ER 2 in 2nd and 3rd Quadrants |
|---|---|---|
| ER 1 in 1st and 4th quadrants | Phase difference < π | a. Phase difference > π |
| b. Phase difference < π | ||
| ER 1 in 2nd and 3rd quadrants | a. Phase difference > π | Phase difference < π |
| b. Phase difference < π |
| Case | Reading of 1st with Reset | Reading of 1st without Reset |
|---|---|---|
| Reading of 2nd with reset | Inexistence | Needing to complement |
| Reading of 2nd without reset | Normal subtraction | Normal subtraction |
| Motor Parameter | Unit | Value |
|---|---|---|
| Rated velocity: n | rpm | 3000 |
| Armature resistance: R | 5.5 | |
| Torque constant: Kt | Nm/A | 25.4 |
| Magnet constant: Ke | Vs/rad | 1.7 |
| Voltage: u | V | 12 |
| Parameters | Unit | Value |
|---|---|---|
| Mass of vibration frame: m | g | 640 |
| Mass of ER: m0 | g | 23 |
| Moment of inertia of system: | gm2 | 72 |
| Mass of encoder: me | g | 133 |
| Eccentric radius: r | mm | 10 |
| Stiffness of springs in x-direction: kx≈ky | N/m | 6000 |
| Stiffness of springs in -direction: | Nm/rad | 1140 |
| Damping of springs in x-direction: fx≈fy | N/(m/s) | 34 |
| Damping of springs in -direction: | Nm/(rad/s) | 27 |
| Damping of rotors: | Nm/(rad/s) | 0.01 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, X.; Liu, J.; Li, L. Dynamics of the Vibration System Driven by Three Homodromy Eccentric Rotors Using Control Synchronization. Appl. Sci. 2021, 11, 7691. https://doi.org/10.3390/app11167691
Chen X, Liu J, Li L. Dynamics of the Vibration System Driven by Three Homodromy Eccentric Rotors Using Control Synchronization. Applied Sciences. 2021; 11(16):7691. https://doi.org/10.3390/app11167691
Chicago/Turabian StyleChen, Xiaozhe, Junqi Liu, and Lingxuan Li. 2021. "Dynamics of the Vibration System Driven by Three Homodromy Eccentric Rotors Using Control Synchronization" Applied Sciences 11, no. 16: 7691. https://doi.org/10.3390/app11167691
APA StyleChen, X., Liu, J., & Li, L. (2021). Dynamics of the Vibration System Driven by Three Homodromy Eccentric Rotors Using Control Synchronization. Applied Sciences, 11(16), 7691. https://doi.org/10.3390/app11167691