1. Introduction
In recent years, with the development of UAV-related technology, the application of UAVs has penetrated into all aspects of society. It is an indispensable tool for search and rescue in critical and time-sensitive missions due to its strong adaptability, low risk, low cost, and no casualties to the physical environment. However, due to the increasingly complex mission environment, it is more and more difficult for a single UAV to search the target area, and it is often unable to complete all the aerial search tasks in a short time. Therefore, the study of cooperation mechanism among multiple UAVs is helpful to solve more complex and valuable application problems. Multi-UAVs cooperation can carry out multiple tasks in military and civil fields, including regional reconnaissance, search and rescue, terrain survey, etc., which has higher task execution efficiency and fault tolerance compared with single UAV. The key problem of multi-UAVs cooperative search is coverage and task assignment. One or a set of ordered tasks are assigned to each UAV to maximize the overall operational efficiency of the UAV. Obviously, multi-UAVs’ cooperative target search can be turned into a multi-objective optimization problem (MOP).
Recently, increasingly more scholars are using intelligent algorithms to solve MOPs [
1,
2,
3,
4,
5,
6,
7]. Intelligent algorithms include particle swarm algorithm [
2], genetic algorithm [
3], and simulated annealing algorithm [
4]. Reference [
5] improves the updating strategy of particles and enhances the robustness of multi-objective particle swarm optimization algorithm in solving permanent magnet optimization problems of electromagnetic devices. In Reference [
6], a hybrid multi-objective optimization algorithm combining differential evolution and particle swarm optimization (PSO) is proposed for the contactor (electromagnetic device) optimization problem to accelerate the convergence rate and obtain the limit optimal solution. In Reference [
7], a multi-objective optimization method with adaptive weight determination scheme and tunnel method is proposed. By using the concept of hyperplane, the weights of different objective functions are determined adaptively, so that new solutions can be found gradually in the target space. The pigeon-inspired optimization (PIO) is a new swarm intelligence optimization algorithm proposed in recent years. It is widely used in neural network, path planning, and other fields because of its fast convergence speed and easy implementation. PIO algorithm can be divided into map and compass operator and landmark operator. In the map and compass section, the pigeon updates its position and speed according to the global optimal position during each iteration. In the landmark section, the pigeons update their positions with the best position for each iteration. Two operators are employed to guide the pigeons to find the destination. Although PIO algorithm is superior to other intelligent optimization algorithms, such as PSO and DE, it still has the common precocious convergence problem.
In the present study, PIO algorithm was optimized. Optimization is mainly divided into two parts: initialization optimization and optimization in the iteration update phase. In the initial part, there are the following studies: Duan et al. added the orthogonal design strategy in the initial stage to improve the diversity of individuals [
8]. In Reference [
9], Pareto sort is added into the initialization stage to apply to the multi-objective optimization algorithm to improve the efficiency of the algorithm. The optimization of iterative update mainly has the following three optimization objectives: (1) In order to increase the population diversity, the predator strategy was introduced in the studies of [
10,
11,
12] to increase the diversity of pigeons and overcome the local optimal solution; Deng introduced the concept of dynamics to improve population diversity [
13]. (2) In order to solve the problem of the pigeons being easily trapped in the local optimal solution, Duan added the global update operator at the beginning of the iteration, and on this basis, added the population mutation operator further, which can expand the search scope and make the population out of the local optimal solution [
14]. Reference [
15] was able to effectively reduce the probability of optimization results falling into local optimum by implementing compass and landmark operators with Cauchy variation. (3) To solve the convergence speed, efficiency, and robustness of the algorithm, References [
16,
17] introduced the parallel competition and hierarchical search strategy and the pigeon-group hierarchy network mechanism, respectively, to improve the global search ability and local convergence ability of the algorithm. Xu et al. added interference factors in the map and compass stages, which could improve efficiency, and selected classification learning strategy in the landmark stage [
18]. Hai et al. proposed an optimization algorithm based on evolutionary game theory to improve the adaptability of the original PIO algorithm. Meanwhile, the robustness and efficiency of the algorithm are enhanced [
19]. In Reference [
20], mutation mechanism was added in the iterative update stage to enhance the exploration ability of the pigeons and improve the efficiency of the algorithm.
It can be seen from the above that the optimization of PIO algorithm is mainly focused on the iterative update stage only, while there are not many studies on the simultaneous optimization of initialization and iterative update stage. Therefore, a target search algorithm based on chaotic disturbance pigeon-inspired optimization is proposed in this paper. The chaos mapping is used to initialize the population, which can enrich the diversity of the population and enhance the global search ability. In addition, this paper also adds disturbance factors in the traditional iteration update stage to avoid the algorithm easily falling into local optimum and premature convergence, so that the algorithm has a better global search ability.
The remainder of this paper is organized as follows. The second section describes the basic idea and process of PIO algorithm and points out the problems to be optimized at each stage. The third section illustrates CDPIO algorithm. Simulation validation, together with comparison with the traditional approach, is presented in
Section 4. In the fifth section, the performance of CDPIO algorithm will be verified by combining the practical problem of UAV cooperative target search.
Section 6 provides conclusions and some possible paths for future work.
2. Related Work
2.1. PIO Algorithm
Pigeon-inspired optimization (PIO) is a new swarm intelligence algorithm based on pigeon behavior recently proposed by Professor Duan [
21]. By sensing the earth’s magnetic field and following their familiar landmarks, pigeons can always find their way to their destinations as quickly as possible.
The process of PIO algorithm can be divided into three main parts:
(1) The population initialization
Before algorithm execution, parameters need to be initialized. Initialization parameters include the population size , solution space dimension , map and compass factor , the total number of iterations , the number of iterations max and max for two operators, and max. Although PIO algorithm has a fast convergence speed, it also has a fatal shortcoming: it is easy to fall into local optimum. As you can imagine, the whole searching process is towards the optimal or the best individual; therefore, when the solution of initialization is dense, or when the optimal initial position is not in the vicinity of a truly global optimal, the error of orientation will make the space of whole other individual search mistakes along the way, and the optimal solution cannot be found.
Aiming at this defect, we optimized PIO algorithm in the population initialization stage. In the process of initialization, adding chaotic mapping makes the initial sequence generated more random, and the solution space covers a wider area, which can obtain a better distribution of pigeons so that the population has diversity and convergence.
(2) Map and compass section
The main principle that pigeons use to find their destination is to sense the earth’s magnetic field to create a map in their minds. At the same time, they can adjust their orientation according to the height of the sun. In the d dimensional search space, each pigeon
has two attributes: position
and speed
. Pigeons use maps and compasses to update their position and speed. The updating equation of the n-th iteration is as follows:
where
is the global optimal position, which can obtain the best position in the whole search space, and
R is the map and compass operator determined by the actual situation and experience, and
.
In the late iteration of the map and compass part of PIO algorithm, all the pigeons gradually gather together, and the optimal position of the pigeon colony only changes very little over a long period of time. In this case, the position update of pigeons is very slow, and each pigeon will slowly stop moving until it finally converges to a certain position in the search space. In this case, it will fall into local optimum. To solve the above problems, this paper proposes an improved PIO algorithm—CDPIO. Tent chaotic disturbance is introduced into iterative updating to increase the global search ability of the algorithm. Firstly, the chaotic variable
carrier generated by the population initialization is put into the solution space to be solved, and then the chaotic disturbance of the individual is carried out according to certain rules. Finally, enhanced individual performance and better searching effect can be achieved by the simulations in
Section 4 and
Section 5.
(3) Landmark section
Pigeons use landmarks as a tool to optimize their position as they approach their destination. Pigeons familiar with the landmark flew directly to their destination, while those unfamiliar followed them. Assuming that every pigeon could fly directly to its destination, half of the pigeons familiar with the landmark could find a nearby center that would guide them to their destination as quickly as possible. In each iteration, the number of pigeons
is reduced by half. The updated equation is as follows.
where
is the average center of the pigeons in each
n-th iteration, and
is the quality of the pigeon individual. For the maximizing optimization problem, we have the expression of
.
For the minimization optimization problem,
where
is a positive value close to 0.
Finally, we can obtain the global optimal position
after
iterations.
where
represents the global best location.
2.2. Analysis of Traditional Mapping Approaches
Chaos is a seemingly random motion that determines the dynamic system, and it is ubiquitous in nonlinear systems. Chaotic motion has three remarkable characteristics: (1) it is highly sensitive to initial values; (2) ergodicity of motion trajectory; (3) randomness. It can traverse every orbit according to its own rules within a certain range, not repeating itself nor crossing itself. Because of the randomness as well as the ergodicity and regularity of chaotic variables, they have been applied to the optimization search problem by many scholars, which can not only effectively maintain the diversity of the population, but also help the algorithm to jump out of the local optimum and improve the global searching ability.
Logistic mapping and tent mapping are the most commonly used at present. Most studies use logistic mapping to carry out chaotic operation. Xu et al. used Logistic mapping in the initial stage to make individual search more accurate and avoid falling into local optimal. Meanwhile, chaotic processing was only performed on some currently superior individuals to speed up the convergence rate [
22].
The mathematical expression of Logistic mapping is expressed as:
where
t is the iteration time steps,
,
is a tunable parameter to ensure that the mapped
is always within
,
. The results show that when the value of
μ meets the condition of
, especially when it is close to 4, the value generated by iteration is in a random distribution state. However, the value probability of Logistic mapping is high at both ends of the interval, and thus the optimization speed of the algorithm will be affected by the unevenness of Logistic traversal.
Tent mapping has better traversal uniformity and convergence speed than logistic mapping and can be used to optimize the search ability of the algorithm. In view of the decrease of population diversity, it is easy to fall into the problem of local optimal solution. However, most of the current literature studies are focused on PSO algorithm. There are few studies on PIO algorithm. In the existing literature, most of the studies use tent mapping to initialize the population, which effectively improves the diversity of the population. By chaotic search, the adaptive tent mapping optimization is used to help our algorithm to jump out of the local optimum and enhance the global search ability. Among them, the advantage of tent mapping can make up for the disadvantage of PIO algorithm, and therefore chaotic mapping can be considered to apply to the optimization of PIO algorithm.
3. Proposed Algorithm
3.1. Population Initialization Based on Tent Mapping
Before the execution of PIO algorithm, the parameters and pigeon cluster sequence need to be initialized. The parameters include: , where represent the maximum iteration times of the map and compass part and the landmark part, respectively, and .
The pigeon cluster initialization sequence is generated using tent mapping.
There are small periods and unstable periodic points in traditional tent chaotic sequences. According to the ideas in [
23], the traditional tent mapping is improved in this paper. In order to avoid it falling into small periodic points or unstable periodic points and at the same time not destroying the three characteristics of chaotic variables, we optimized the original tent mapping expression as follows.
Random variable
is introduced into the original tent mapping expression, and the improved expression is shown as follows.
The expression after the Bernoulli transformation [
24] can show that
where,
is the generated chaotic sequence,
is the number of particles in the chaotic sequence, and
is the random number between
.
First, generate the initial value in the interval , denoted by ; then, according to the above Equation (11), loop iteration is carried out to generate sequence, with increasing by 1. When the number of iterations reaches the maximum, the program is over, and the generated sequence will be saved as the initialization pigeon cluster sequence of this algorithm.
In the process of initialization, adding chaotic mapping makes the initial sequence generated more random and covers a wider area, which can get a better distribution of pigeons.
Implementation steps of population initialization are shown in Algorithm 1.
| Algorithm 1 Population Initialization |
Step1: Initialize the population to generate the initial value in the interval , denoted by .
Step2: Equation (13) is used for iteration to generate sequence, with increasing by 1.
Step3: If the maximum number of iterations is reached, the program will stop and the resulting sequence will be saved. |
3.2. Iterative Updating Based on Disturbance Mechanism
In the late iteration of the map and compass part of PIO algorithm, all the pigeons gradually gather together, and the optimal position of the pigeon colony only changes very little over a long period of time. In this case, the position updating of pigeons is very slow, and each pigeon will slowly move until it finally converges to a certain position in the search space. In this case, it will fall into local optimum. To solve the above problem, this paper proposes an optimization algorithm (CDPIO), which introduces tent chaotic disturbance in the iterative update phase to increase the global search ability of the algorithm.
In the iterative update stage, the pigeon mainly adjusts its direction through a compass to find its destination. In the dimensional search space, each pigeon has two attributes: position and speed . Pigeons will use a map and compass and update their position and speed according to the appropriate strategy. Pigeons familiar with the landmark flew directly to their destination, while those unfamiliar followed them. Each pigeon will reach its destination as fast as possible through the center pigeon. After the completion of one iteration of the algorithm, the fitness of each pigeon and the average fitness of the flock were calculated. When , it indicates that the pigeons are in the “divergence” trend, and tent chaotic disturbance should be added to optimize the pigeons.
Firstly, the chaotic variable
carrier generated in the initial stage of the population in
Section 3.3.2 is added to the solution space to be solved, which is defined as follows.
where
and
are the maximum and minimum values of the d-dimensional variable
, respectively.
If it is necessary to disturb the current sequence of pigeons, the individuals will be disturbed according to the following disturbance rules.
where
is the individual requiring chaotic disturbance,
is the amount of chaotic disturbance generated, and
is the new individual after chaotic disturbance. If the performance of the disturbed individual is better, the new individual is used to replace the original individual; otherwise, the original individual remains unchanged.
By introducing chaotic disturbance, the algorithm can avoid falling into local optimum and improve the global searching ability and searching precision. Implementation steps of Tent chaotic disturbance mechanism are shown in Algorithm 2.
| Algorithm 2 Tent Chaotic Disturbance |
Step1: The chaos variable is generated by Equation (11).
Step2: Carrier the chaotic variable into the solution space of the problem to be solved.
Step3: According to Equation (12), the chaotic disturbance is performed on the individual, and the replacement and update operation is decided according to the performance comparison between the new and the old individual. |
3.3. CDPIO
The PIO algorithm is well known for its fast convergence speed, and the optimal solution is stable and satisfactory in the search process. However, too high search speed will reduce the traversal ability of PIO algorithm in the whole search space, leading to premature convergence of the algorithm. Therefore, on the basis of the above two aspects of chaotic mapping and chaotic disturbance mechanism, we supplemented and optimized the PIO algorithm.
3.3.1. Population Initialization
In the initialization stage, initial values are set by the initialization mechanism in
Section 3.1 to set the parameters required by the algorithm, and the improved tent chaotic mapping expression is used to generate tent chaotic sequence in the feasible domain; then, the fitness
of each pigeon is calculated, and the current optimal fitness
and its corresponding position
are selected, as well as the current worst fitness
and its corresponding position. The population initialization is thus completed.
3.3.2. Iteration Updating Stage
After the initial stage, the algorithm will enter the iterative update stage. In this section, each pigeon will be updated according to the existing speed and position update strategy. When the algorithm completes an iteration, it will judge whether the pigeons are in a “divergent” trend. If so, the individuals will be disturbed according to the tent disturbance mechanism described in
Section 3.2 of this paper to generate new individuals. After the disturbance, the optimal position
and its fitness
experienced by the whole population are updated according to the current status of the flock, as well as the current worst fitness
and its corresponding position. After updating, the algorithm will judge whether the number of iterations has reached the maximum number of iterations. If not, the cycle of updating iteration will continue. Otherwise, the cycle will end, and the optimal sequence of pigeons will be output as the optimal result of the algorithm.
CDPIO algorithm introduces tent chaotic mapping, which increases the population diversity, improves the performance of the algorithm, and avoids falling into local optimum. The concrete implementation steps of CDPIO are shown in Algorithm 3.
| Algorithm 3 Chaotic Disturbance Pigeon-inspired Optimization Algorithm |
Step 1: Initialize the parameters in CDPIO, including the number of pigeons , the maximum iteration times of compass part , and the landmark part , and the state of each pigeon, the position , and the velocity .
Step 2: The population is initialized according to Algorithm 1.
Step 3: Calculate the fitness of each pigeon, select the current best fitness and its corresponding position , along with the current worst fitness and its corresponding position.
Step 4: Update and according to Equations (1) and (2).
Step 5: If , jump to Step 6, or , and return Step 4.
Step 6: Update according to , and update and preserve .
Step 7: After the completion of one iteration, it is judged as to whether the pigeons need to be disturbed according to Algorithm 3.
Step 8: According to the current status of the pigeons, the optimal position and its fitness experienced by the whole population are updated, as well as the current worst fitness and its corresponding position.
Step 9: If , jump to Step 10; or if , return to Step 6.
Step 10: According to , is obtained and retained. The loop ends and the optimization result is output as the output of the algorithm. |
4. Performance Evaluation of CDPIO
4.1. Simulation Setup
This section is mainly to verify the feasibility and superiority of CDPIO algorithm. In order for the performance and characteristics of the algorithm to be fully tested, many standard functions with different characteristics are usually introduced. Here, nine complex functions [
25], as shown in
Table 1, are used as experimental objects. The functions selected involve multiple complex functions such as single peak, multi-peak, low dimension, and high dimension. The optimization ability of CDPIO algorithm can be fully investigated through various types of reference functions.
Experimental setting parameters are shown in
Table 2:
4.2. Performance of CDPIO
The population size of each algorithm and the total number of iterations were the same, and each individual was evaluated for individual fitness only once during each iteration. The average value, standard deviation, and optimal value of each algorithm were used as the final evaluation index for nine different types of benchmark functions. The correlation performance of each test function was tested and compared with that of PIO algorithm. The optimization results are shown in the table below.
The best value and average value in
Table 3 can be expressed as the convergence precision and optimization ability of the algorithm. For f1, f4, f5, f6, and f7 functions, the convergence accuracy was very high, while for f5, f6, and f8 functions, the average value was very close to the optimal value, and compared with PIO algorithm, the ability of CDPIO has been significantly improved.
The standard deviation in
Table 3 reflects the robustness of the algorithm. Low standard deviation proves that there is little difference in the optimization data and the optimization process is more stable. For f5, f6, f8, and f9, the standard deviation is 0, which is a great improvement compared with the standard deviation of PIO algorithm, indicating that CDPIO has better robustness.
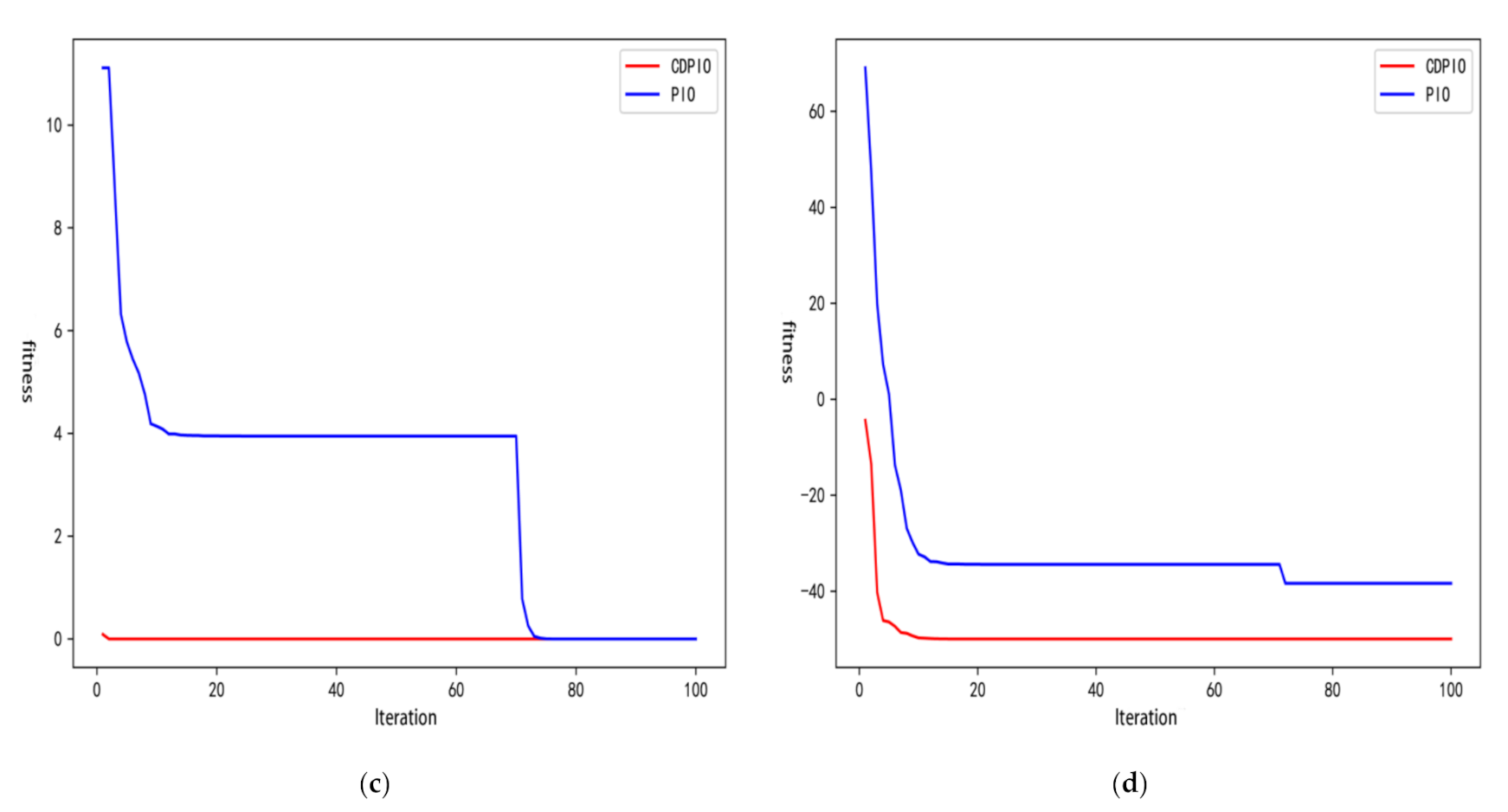
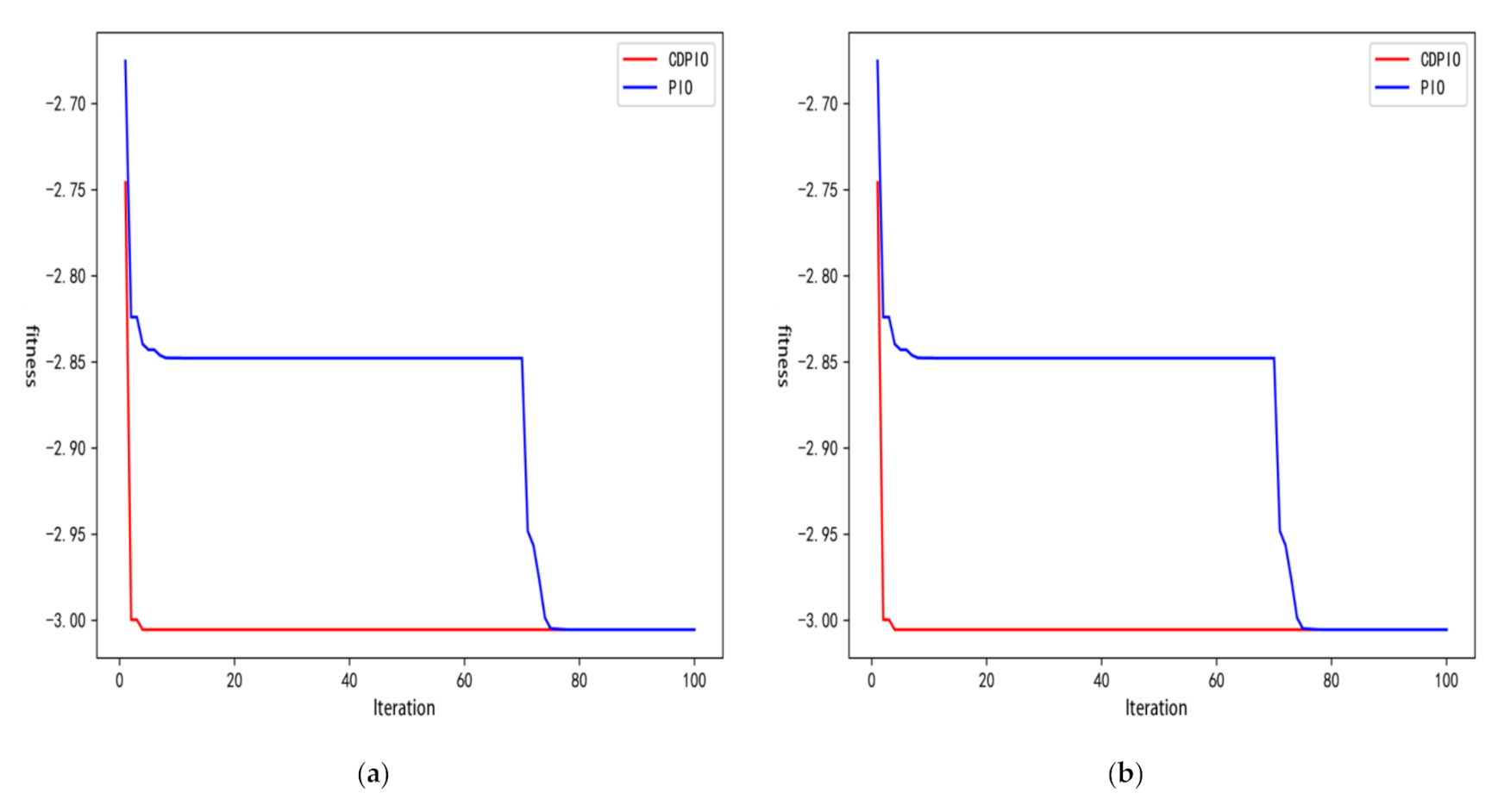
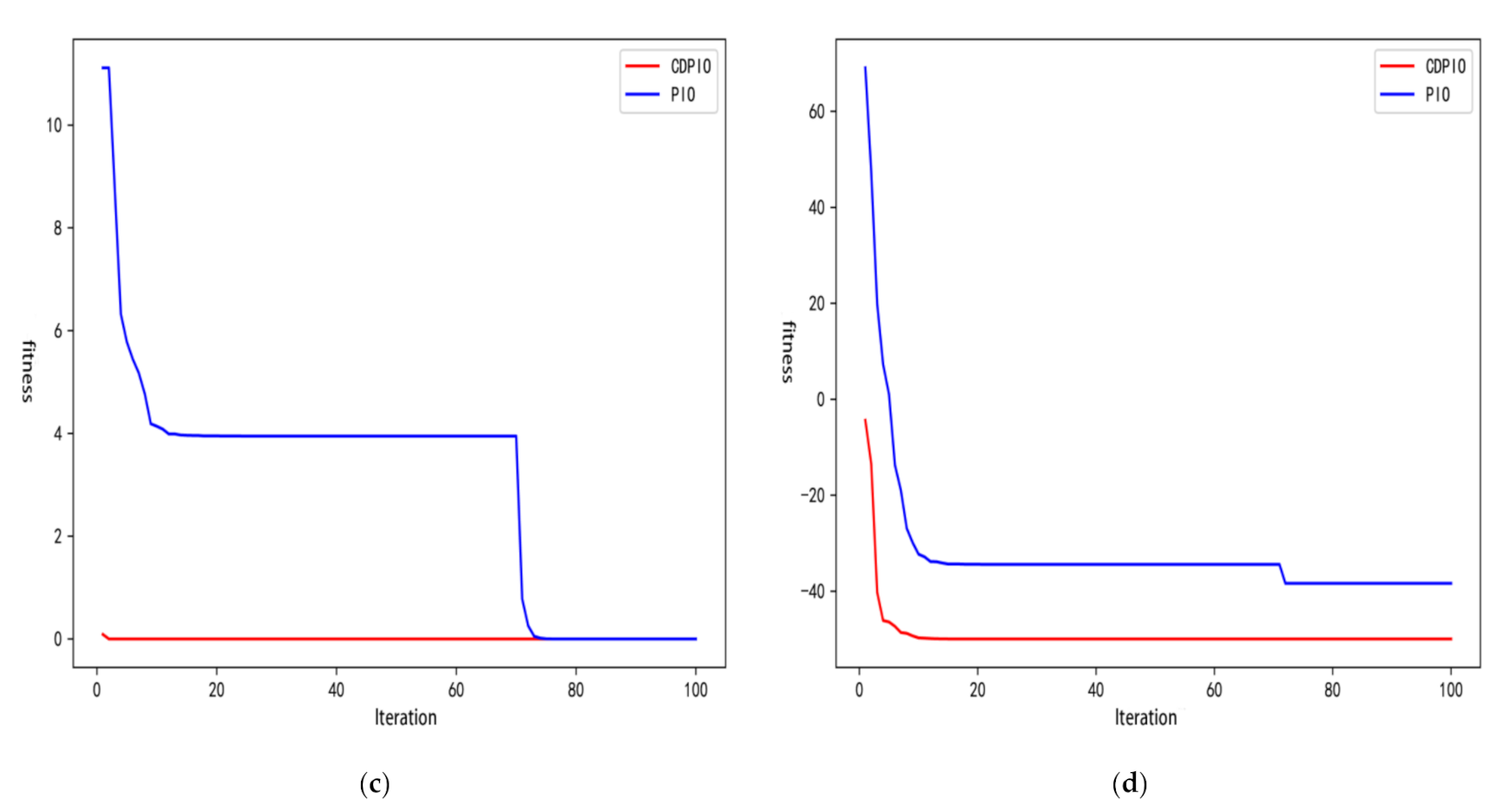
As shown in
Figure 1, the four pictures (a–d) represent the low-dimensional unimodal and low-dimensional multimodal, high-dimensional unimodal, and iterative graph of high-dimensional multimodal function. The blue curve shows the test curve of the benchmark functions using the PIO algorithm, and the red curve represents the test curve of functions using CDPIO algorithm. From the four figures, it can be seen that the efficiency and optimization effect of CDPIO algorithm is obviously better than that of PIO algorithm, no matter whether it is low-dimensional single peak, low-dimensional multi-peak, high-dimensional single peak, or high-dimensional multi-peak function.
It can be seen that compared with PIO algorithm, the CDPIO algorithm has higher accuracy, closer to the theoretical value of the function, and better optimization accuracy, robustness, and optimization efficiency.
4.3. Nonlinear Correlation Performance of CDPIO
The performance of PIO algorithm for finding the optimal value of the function with
will gradually decline with the increase of the dimension of the search space. In order to test the nonlinear correlation of the CDPIO algorithm and the ability of jumping out of the local optimal solution, we selected three test functions. The three test functions [
26] have the same characteristics and all have the form of
. The two algorithms mentioned above are compared and analyzed on the basis of the three test functions. It is concluded that the CDPIO algorithm proposed in this paper has better performance than PIO algorithm.
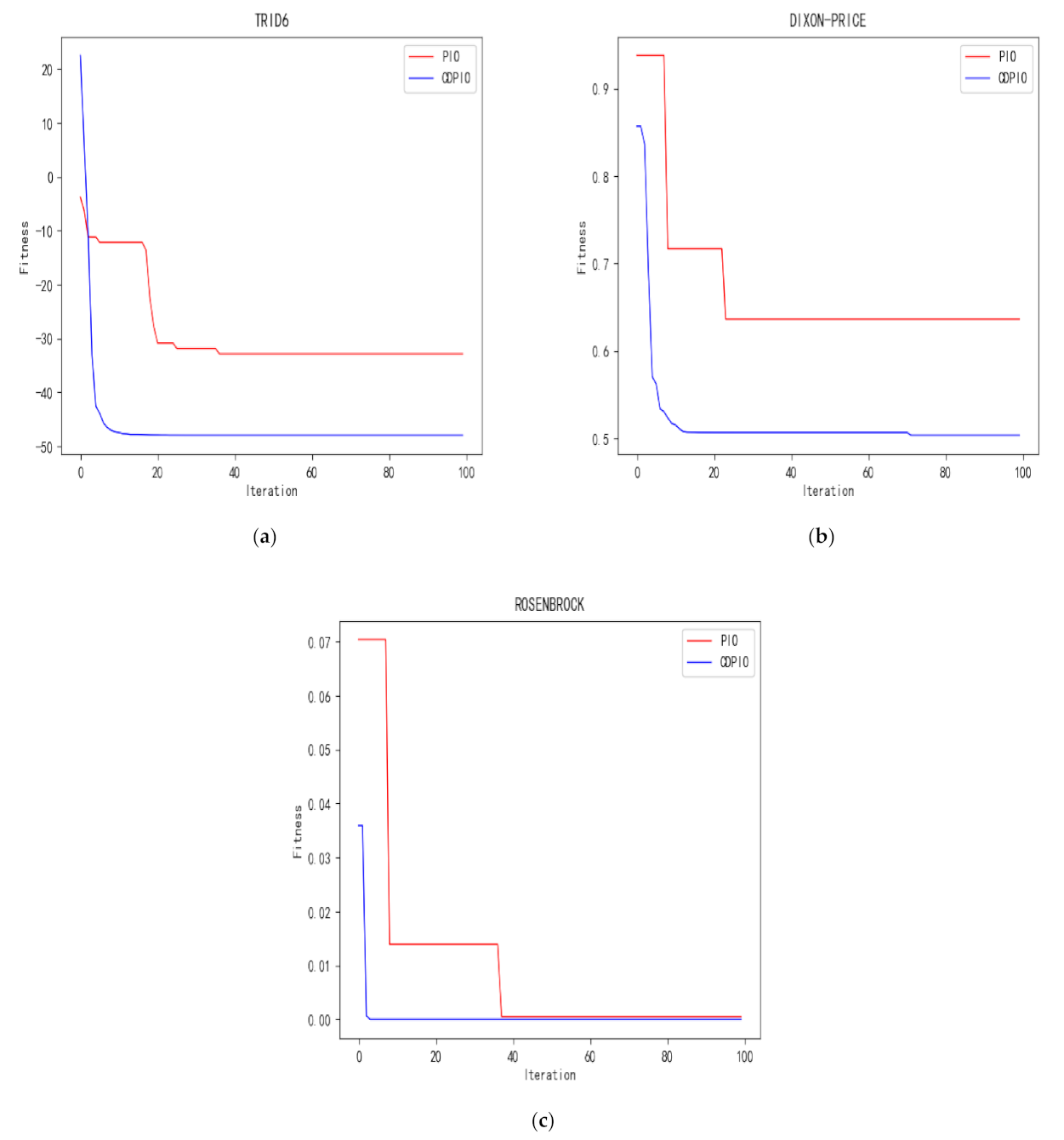
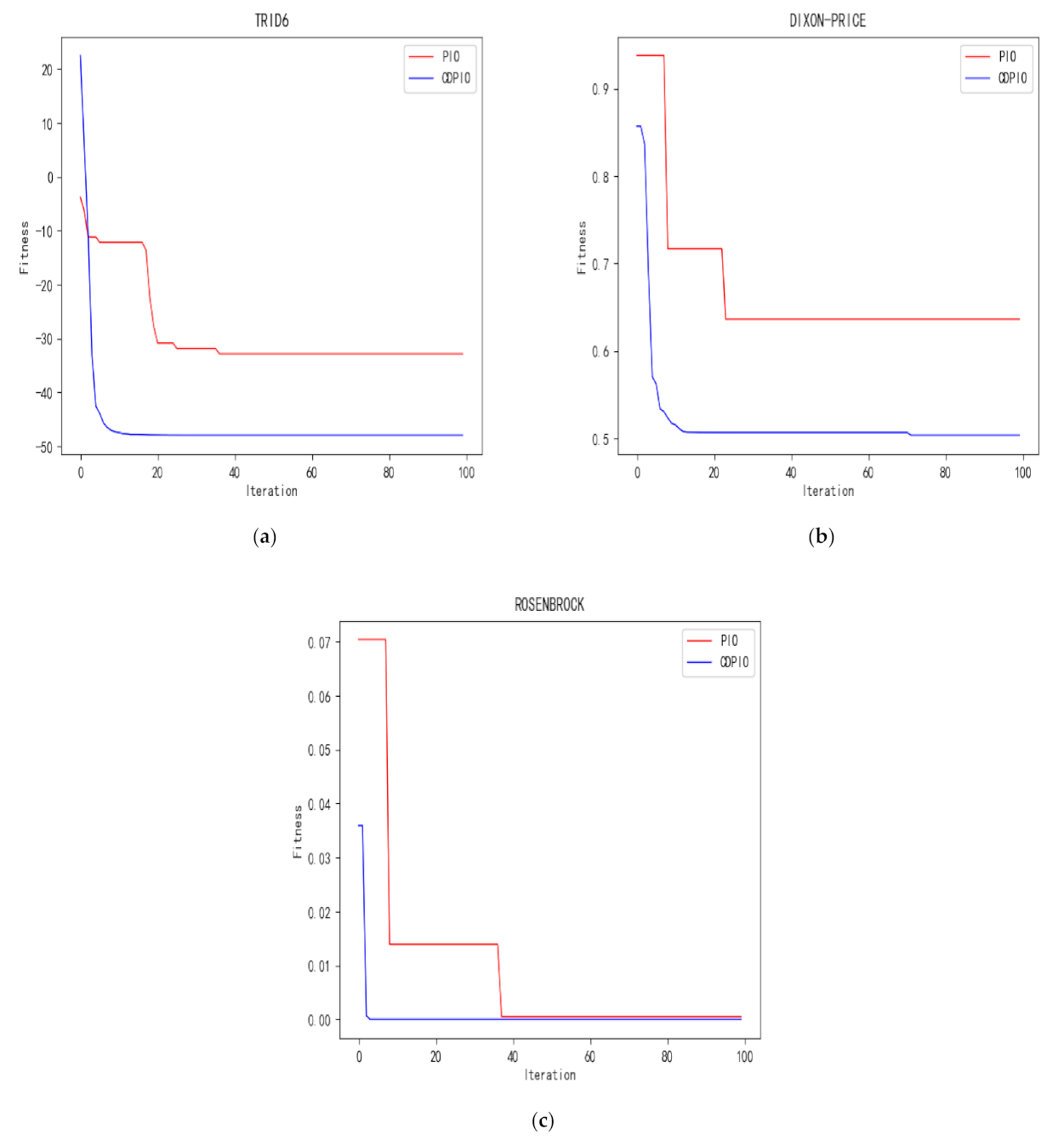
Figure 2 shows the iterative convergence curve of the algorithm.
Figure 2a–d respectively represent the convergence curves of 2 algorithms obtained on TRID, DIXON-PRICE and ROSENBROCK function. The abscissa represents the number of iterations, and the ordinate represents the optimal adaptive value.
The formula of the three test functions is as follows.
The CDPIO algorithm and PIO algorithm proposed are used for testing on the basis of the three functions, and the result analysis diagram is shown below.
It can be concluded from the results of the above three simulation experiments that the convergence accuracy of CDPIO algorithm is significantly improved compared with the PIO algorithm, which is closer to the optimal value and the curve is smoothed. Among them, the closer the optimal fitness value is to 1.0, the higher the optimization precision; the inflection point of the curve appears first, and the convergence speed becomes faster. The smoother the curve is, the stronger the ability of the algorithm to escape the local optimal solution.
To sum up, CDPIO algorithm has good ability to resist local extreme values for most functions, especially for simple low-dimensional functions, wherein it has good robustness, efficiency, and global search ability.
5. Application in Coordinated Target Search of UAVs
UAVs play a key role in search missions, as they can find targets in complex environments. The searching problem of UAVs is a relatively complex multi-objective optimization problem under multiple constraints. Most search algorithms cannot meet the requirements of high efficiency and low power consumption in the search process. In order to further verify the superiority of CDPIO algorithm, not only in reference function optimization but also in the process of solving practical problems, this paper used the CDPIO algorithm to solve the cooperative search problem of UAVs.
5.1. Environment Initialization
The search area was divided into discrete areas of to construct a relatively real environment map. The grid is numbered as and represent the number of grids in two dimensions of length and width. For each network , a certain value is given, where is the information structure, which comprehensively describes the environment and target information in the current grid, as shown below: , including , as the target probability exists, and describing the moment the grid has the possibility of searching for the target. The value of is 0 or 1, indicating whether the UAV fully understands the environmental information at the place; is the function of UAV position and time. When the UAV moves to the current grid, the signal of pheromone information will be generated at the corresponding position, and the information will be transmitted to the nearby UAVs through network communication.
5.2. Cost Function
The cooperative target search problem of UAV is a very complex multi-objective optimization problem. It is very important to select the relevant multi-objective cost function. The cost function set is introduced as follows:
: describes the probability of finding a target;
: describes the environmental certainty of UAV;
: describes the time cost and fuel cost between two consecutive way points;
: used to estimate whether the UAV’s trajectory is within the search area.
A better search task requires a larger cost function: and a lower cost function . Therefore, the inverse values of the cost functions and are used for unified optimization.
5.3. Experimental Result
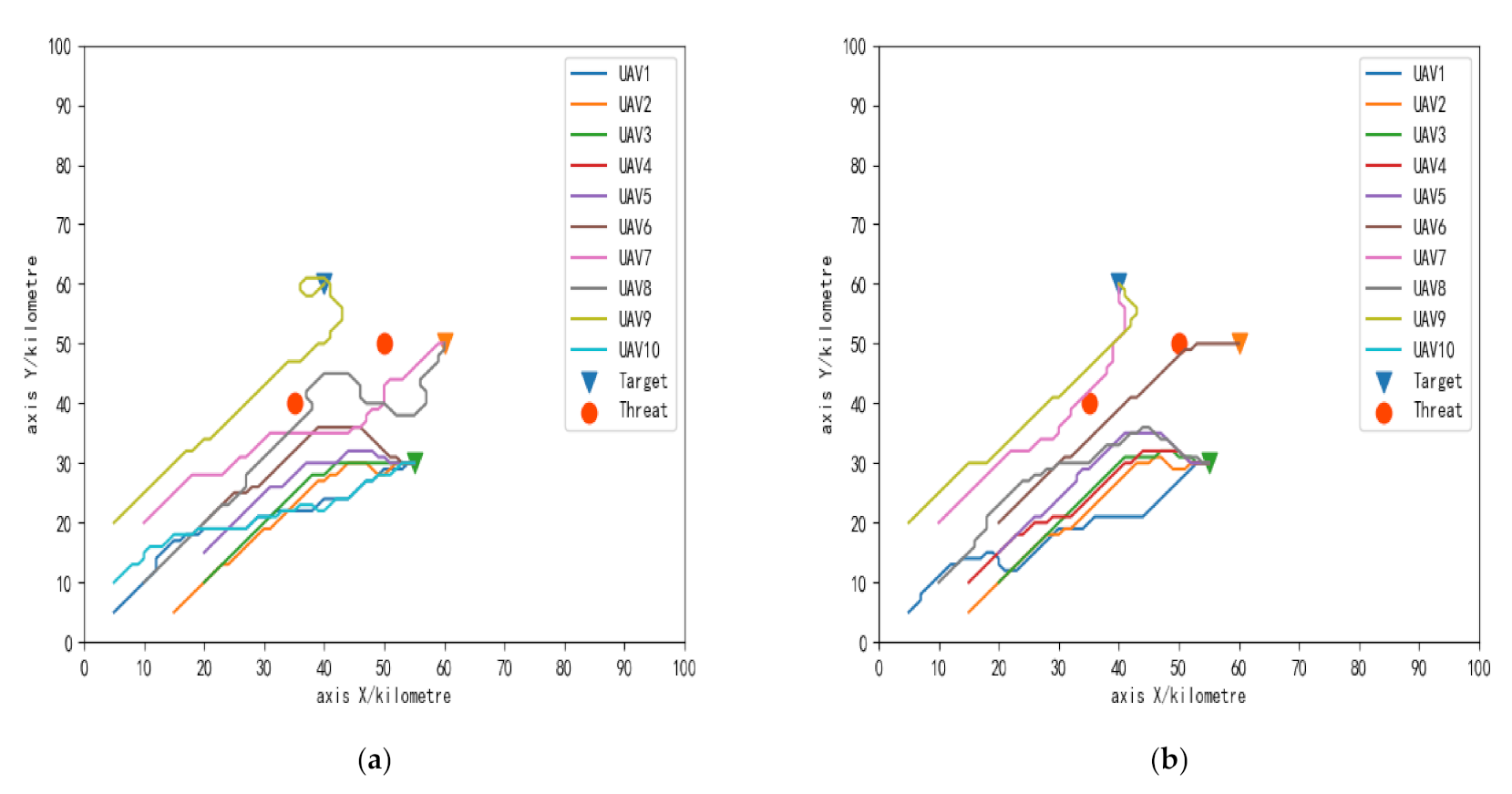
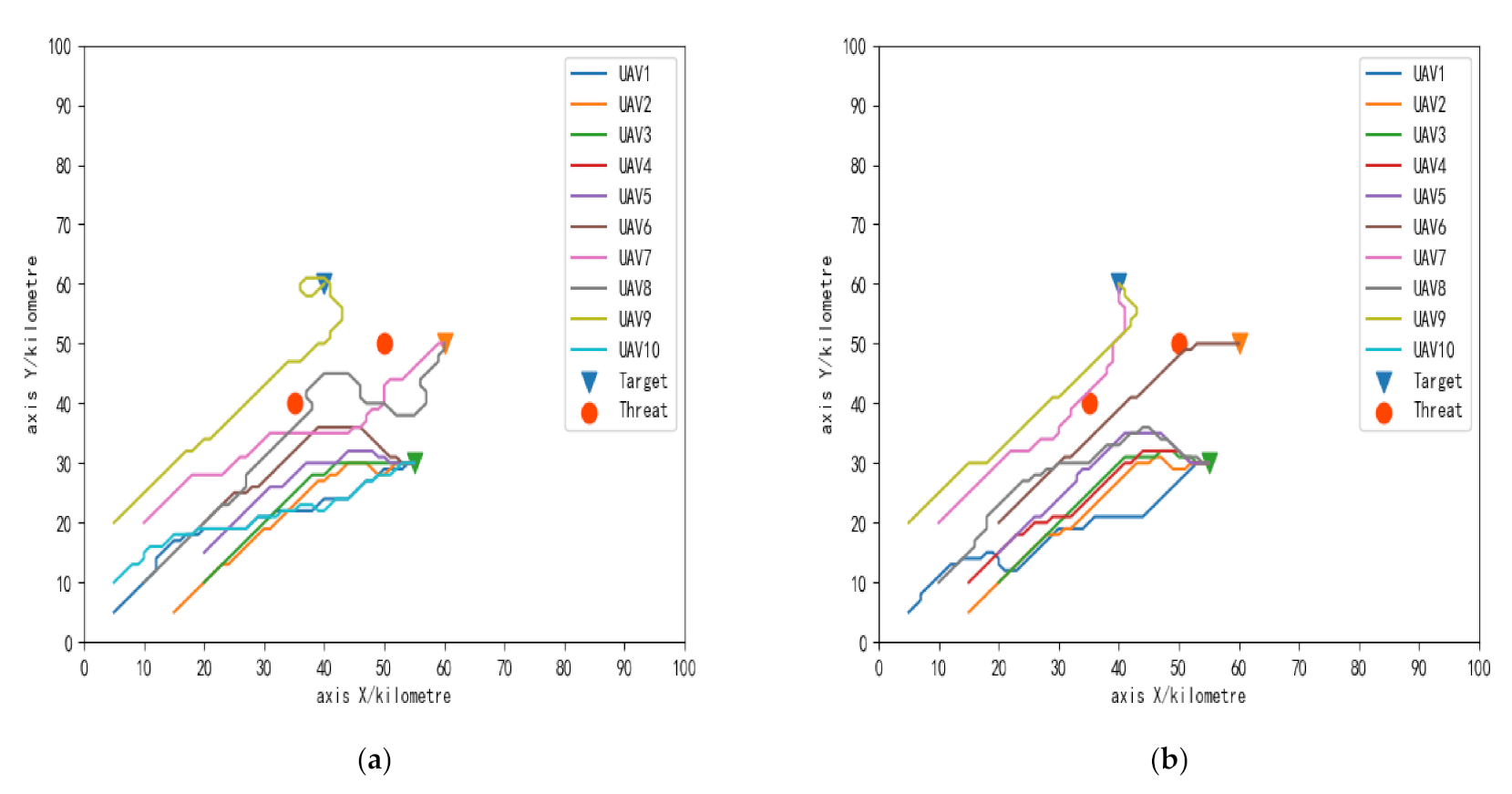
In this paper, CDPIO and PIO algorithms were used to solve the problem. It was stipulated that 10 UAVs should be used to search for targets, among which 10 UAVs should successfully avoid two obstacle threat areas and successfully search for three targets. The experimental results are shown in
Figure 3.
As shown in
Figure 3a, CDPIO was used for the simulation experiment.
Figure 3b shows an experimental study using PIO. In the figure above, no matter whether PIO or improved CDPIO was used, 10 UAVs can successfully avoid the threat areas and find the target together. However, when CDPIO algorithm was used for target search, the UAV was more sensitive to the threat area and its average distance from the threat area was larger. In essence, CDPIO was shown to have a better effect on solving practical UAV cooperative target search.
6. Conclusions
Aiming at the defects of the standard PIO algorithm, we proposed an improved Pigeon-inspired algorithm (CDPIO) in this paper. The improved tent chaotic map was used to initialize the population, and the tent disturbance strategy was introduced in the iteration update stage to improve the performance of the algorithm. The main conclusions of this paper are as follows:
(1) The initial location of the pigeons is very important for the convergence rate and solution precision of the PIO algorithm. The improved tent chaotic mapping has high ergodic, random, uniform, and initial value sensitivity. Using improved tent mapping to initialize the population, the population can be distributed evenly in the whole space effectively. The performance of CDPIO algorithm was greatly improved compared with that of the PIO algorithm by introducing tent disturbance in the iteration update stage to avoid falling into the local optimal solution.
(2) The optimization test results of nine benchmark functions and three special test functions showed that CDPIO has a strong performance advantage over the PIO algorithm in terms of convergence speed, optimization precision, and robustness, which verifies the effectiveness of the improved algorithm.
(3) In the next step, the optimization mechanism and algorithm structure of CDPIO can be further improved and optimized in the optimization time. The intelligent algorithm with better performance was proposed, and the CDPIO algorithm was applied to more complex optimization problems, so as to expand the application field of the algorithm.






{kind=link}
{kind=link}
{kind=link}
{kind=link}