
Fault Location and Restoration of Microgrids via Particle Swarm Optimization

Abstract
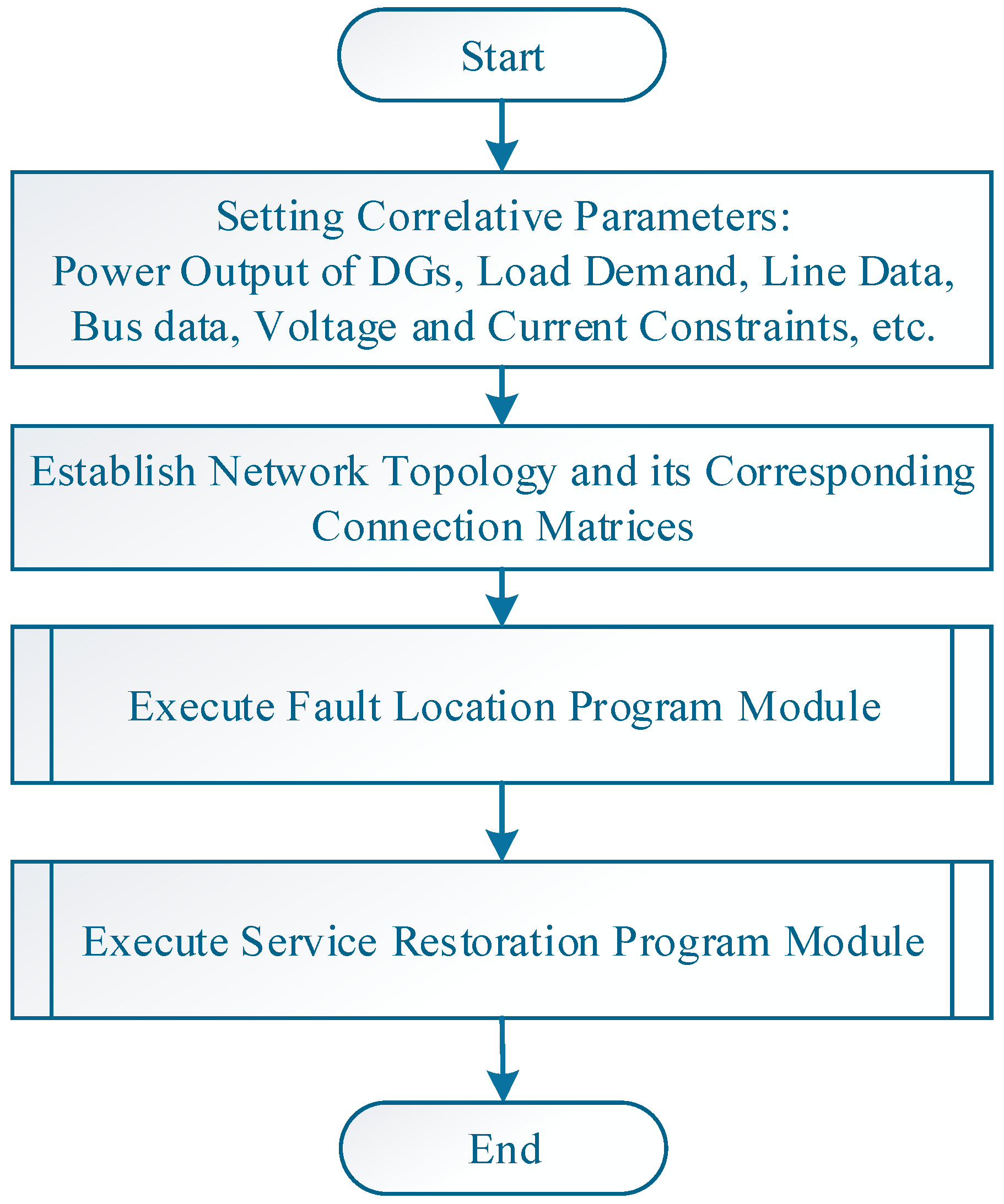
:1. Introduction
2. Problem Description of Fault Location and Service Restoration in MGs
- (1)
- Impedance method;
- (2)
- High-frequency components and wavelet transform;
- (3)
- Artificial neural network;
- (4)
- Comparison measurement and simulation value;
- (5)
- Hybrid method.
3. Derivation of Fault Location Approach
3.1. Graph Theory-Based Power Flow Algorithm
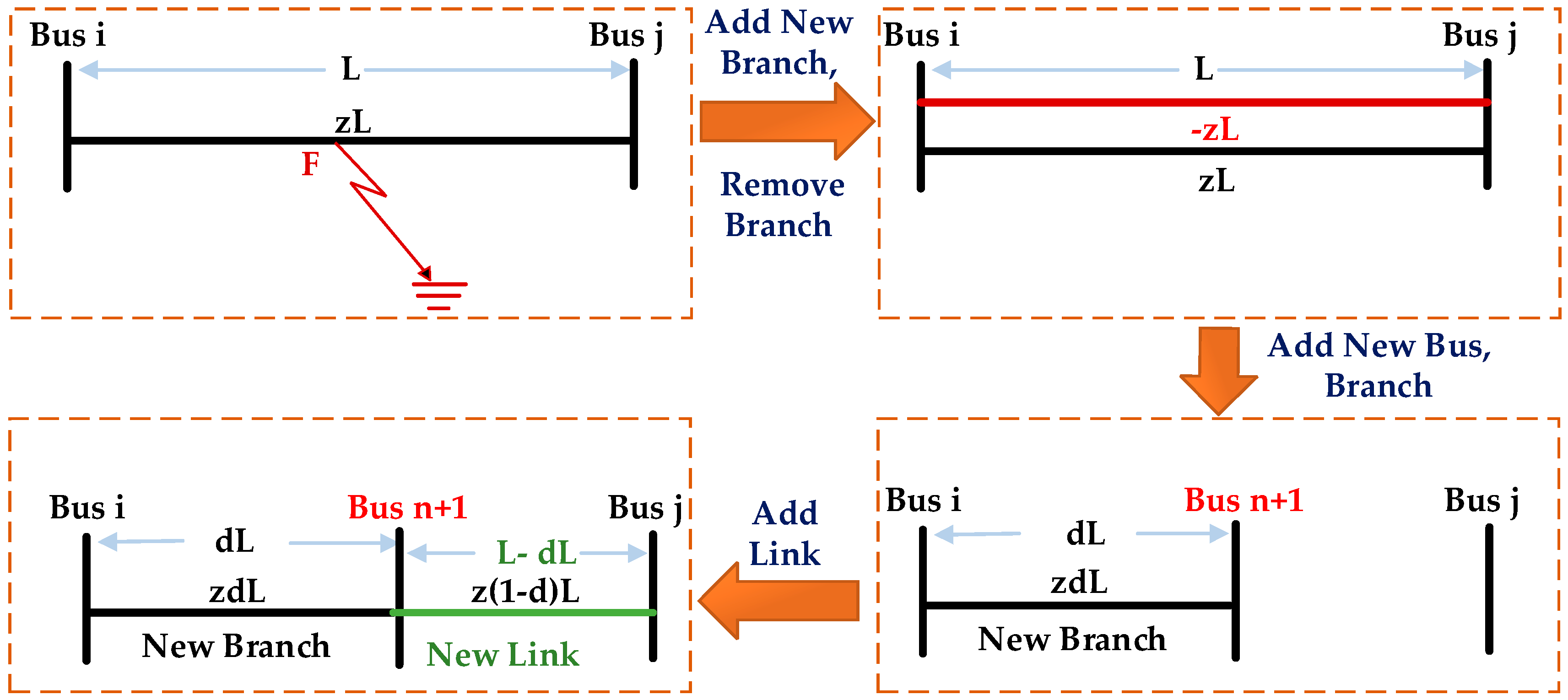
3.2. Fault Location Alogrithm Based on ZBus
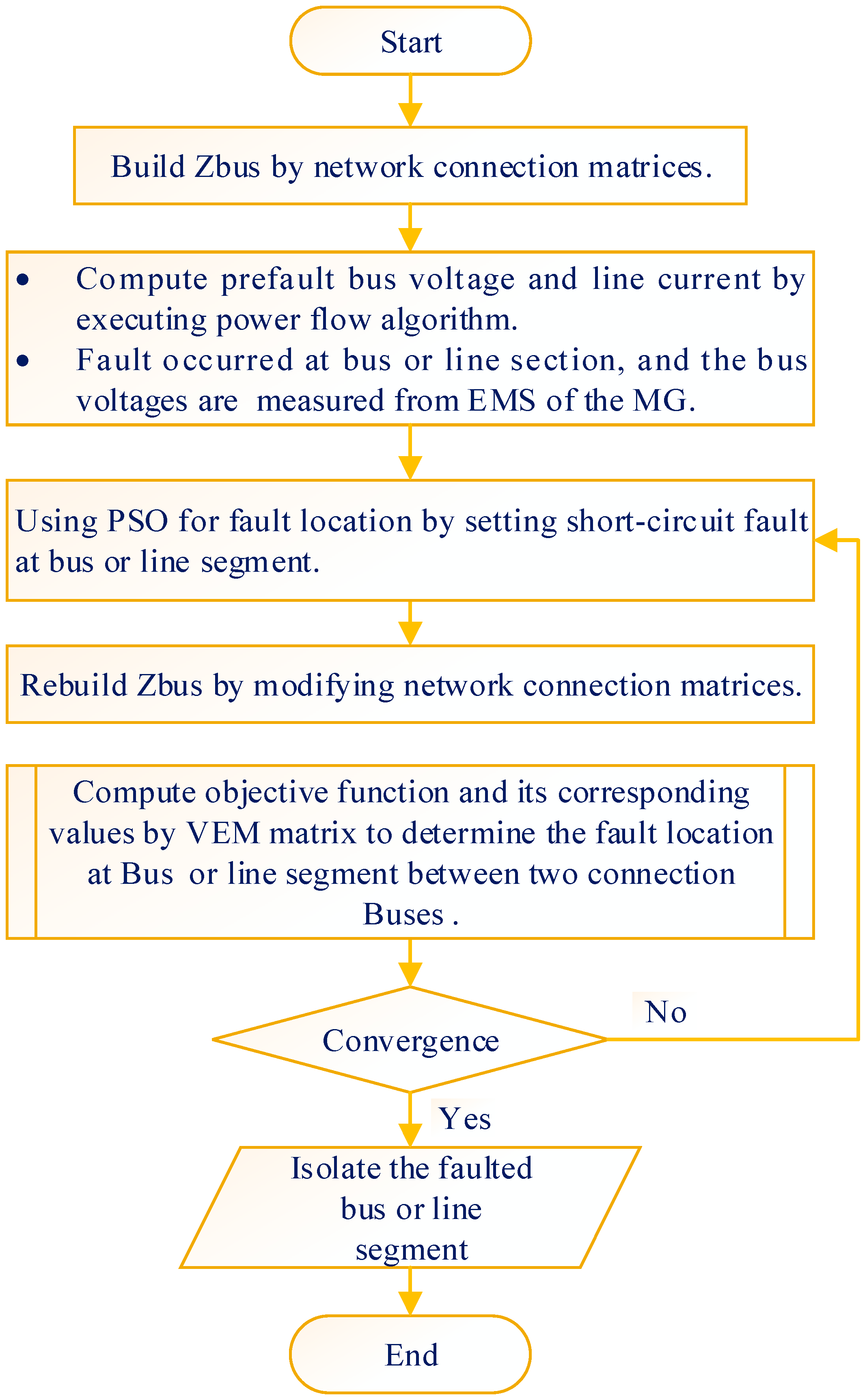
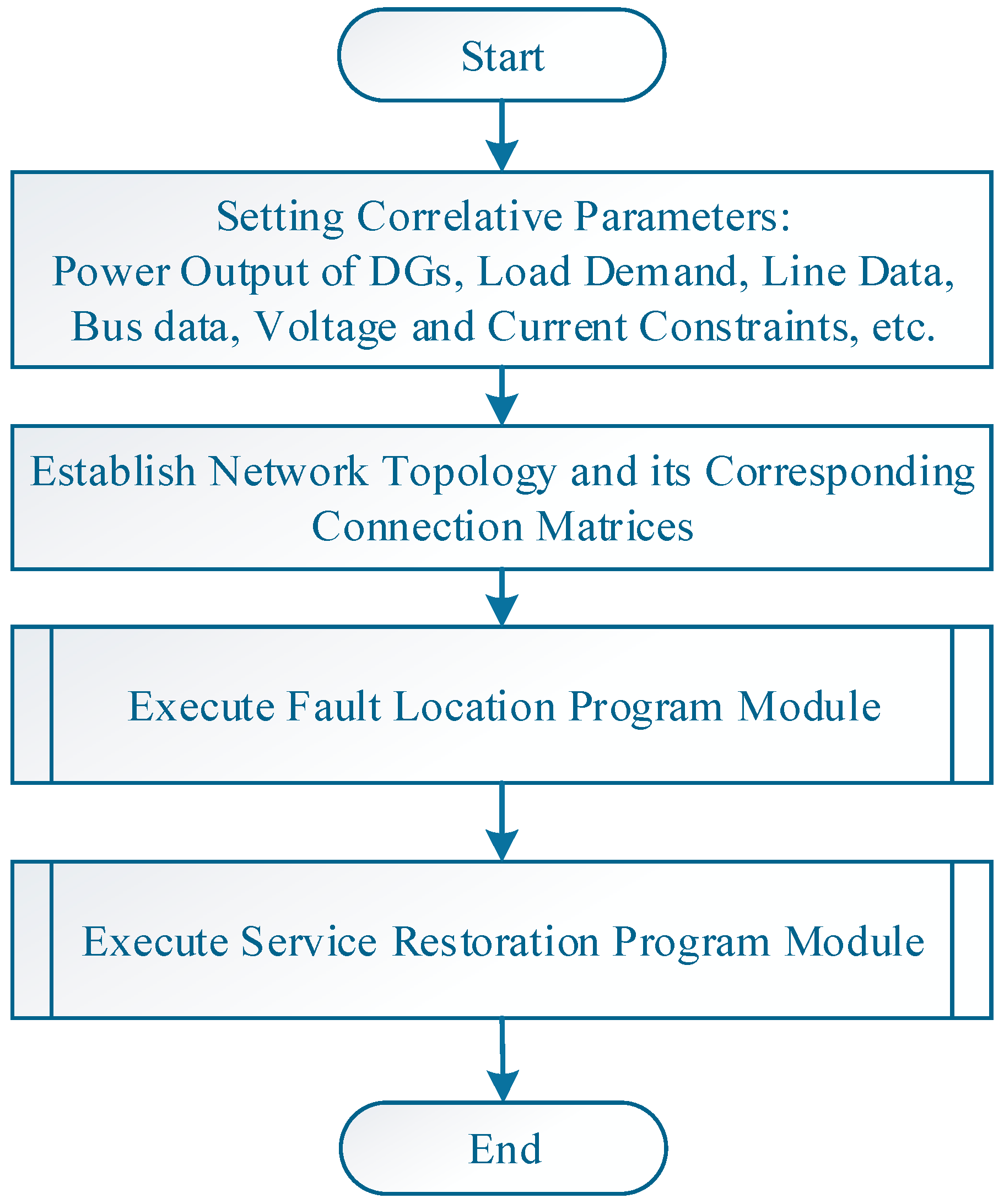
3.3. Solution Procedure of the Proposed Fault Location Algorithm
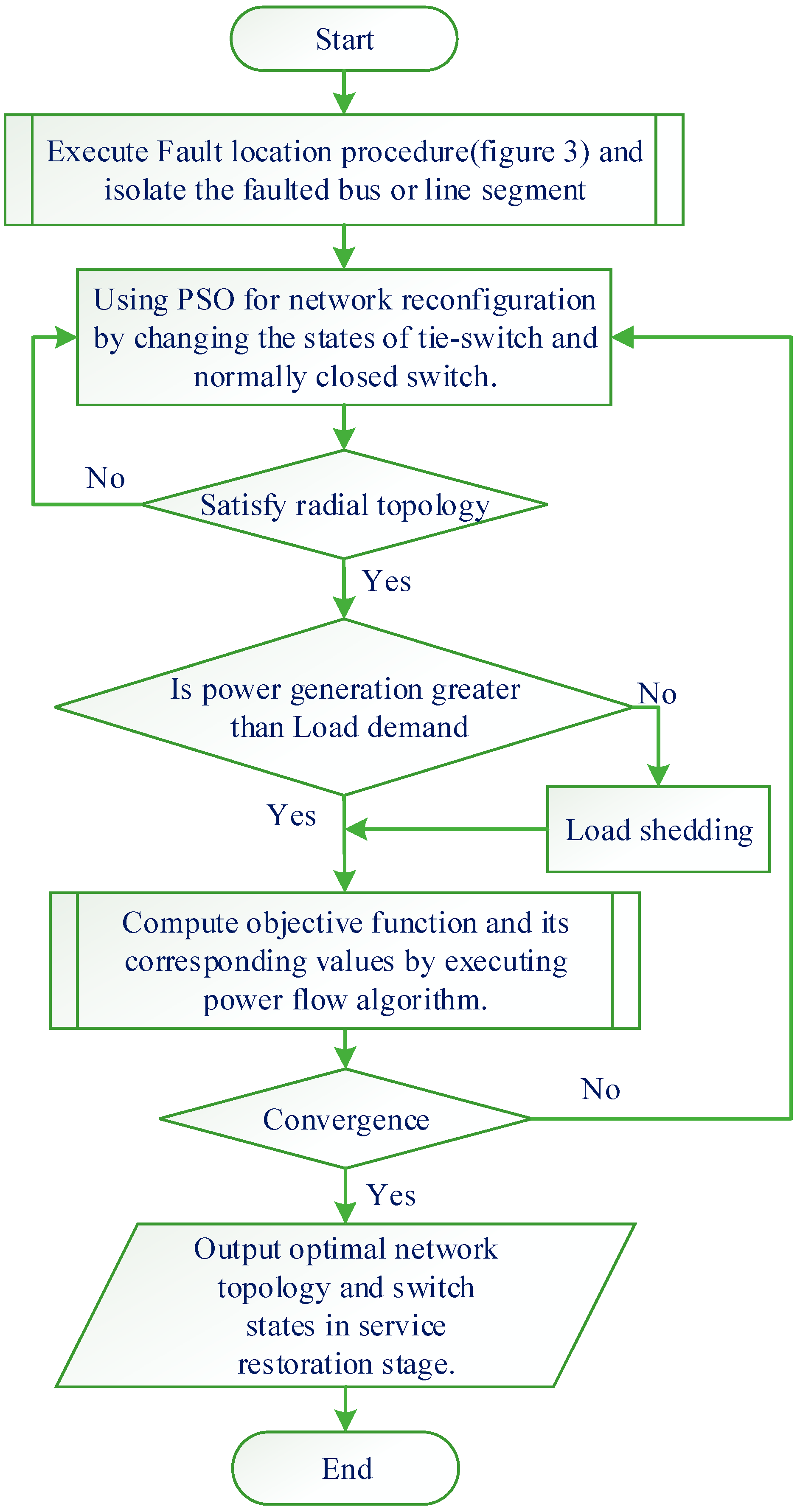
4. Proposed Service Restoration Approach
5. Numerical Results and Discussions
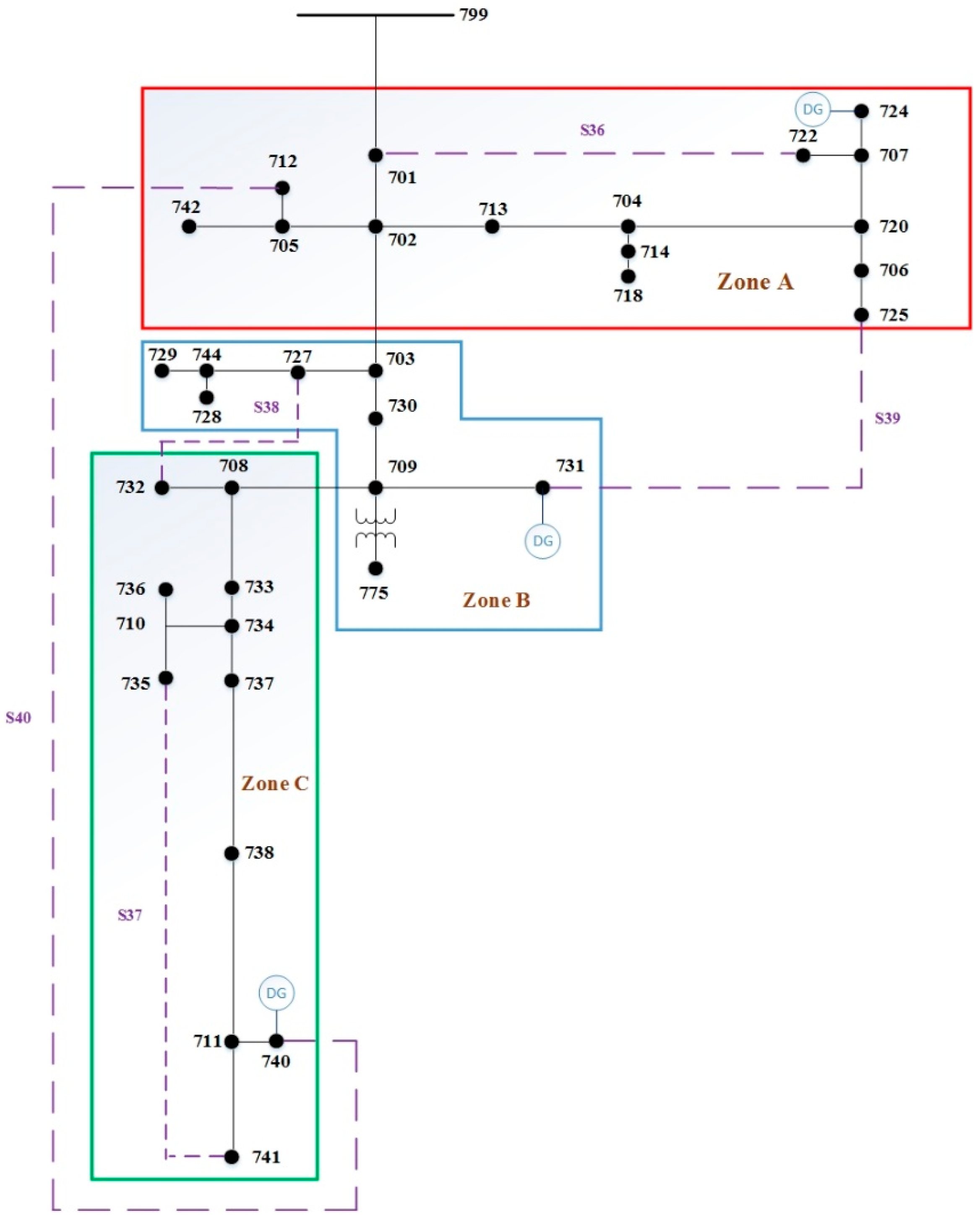
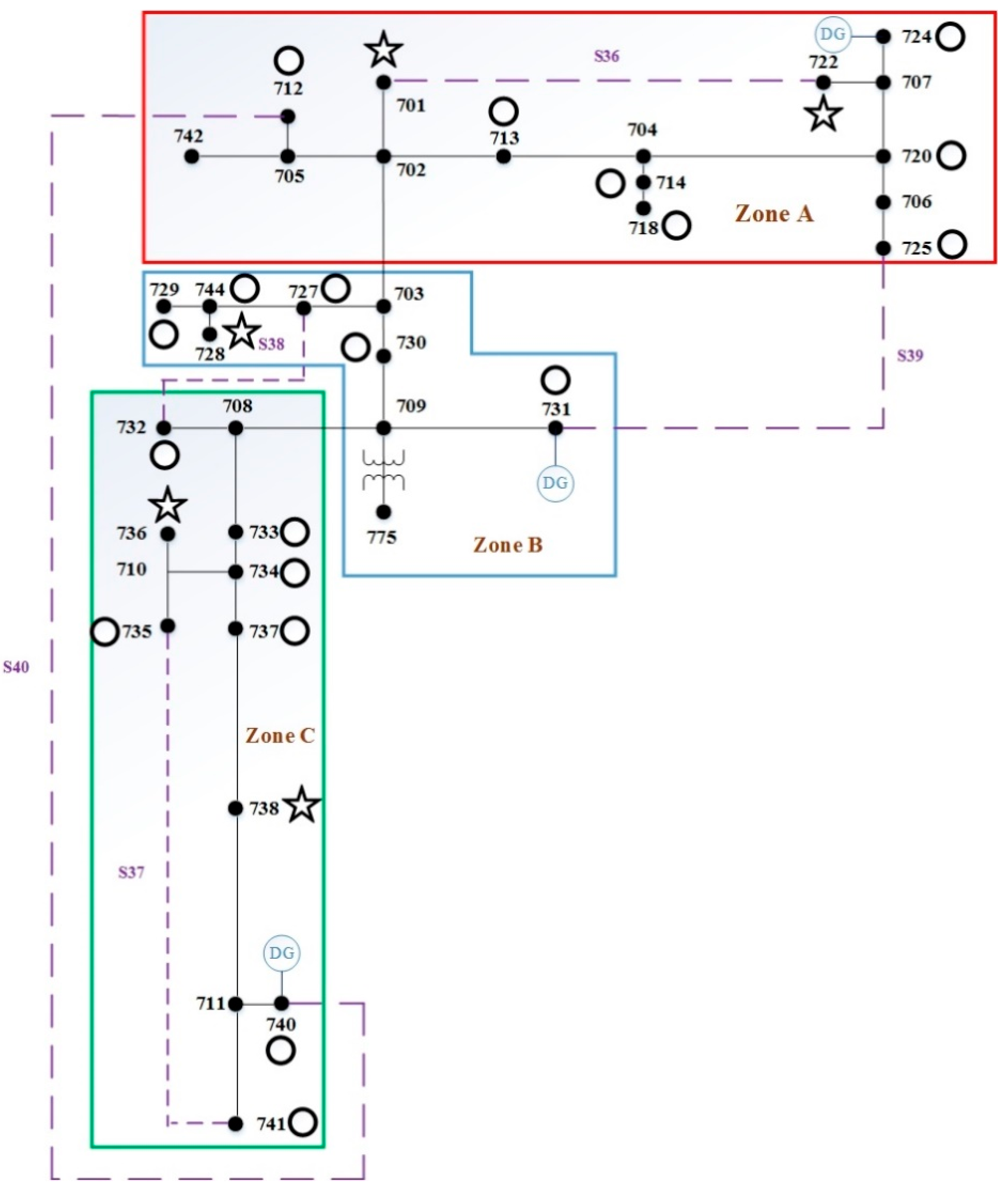
5.1. Description of the Sample System and Simulation Scenarios
- ✓
- Scenario 1: A single-point fault in the line segment is assumed between buses 702 and 703. This fault is used to simulate a situation in which most of the downstream areas of the MG are affected due to the fault that occurred in the upstream of the MG.
- ✓
- Scenario 2: A double-point fault in a line segment is assumed: one point is between buses 702 and 703, and the other point is between buses 727 and 703. This fault is used to simulate multiple power outages in downstream areas. Multiple tie switches and lines must be operated at the same time for service restoration.
- ✓
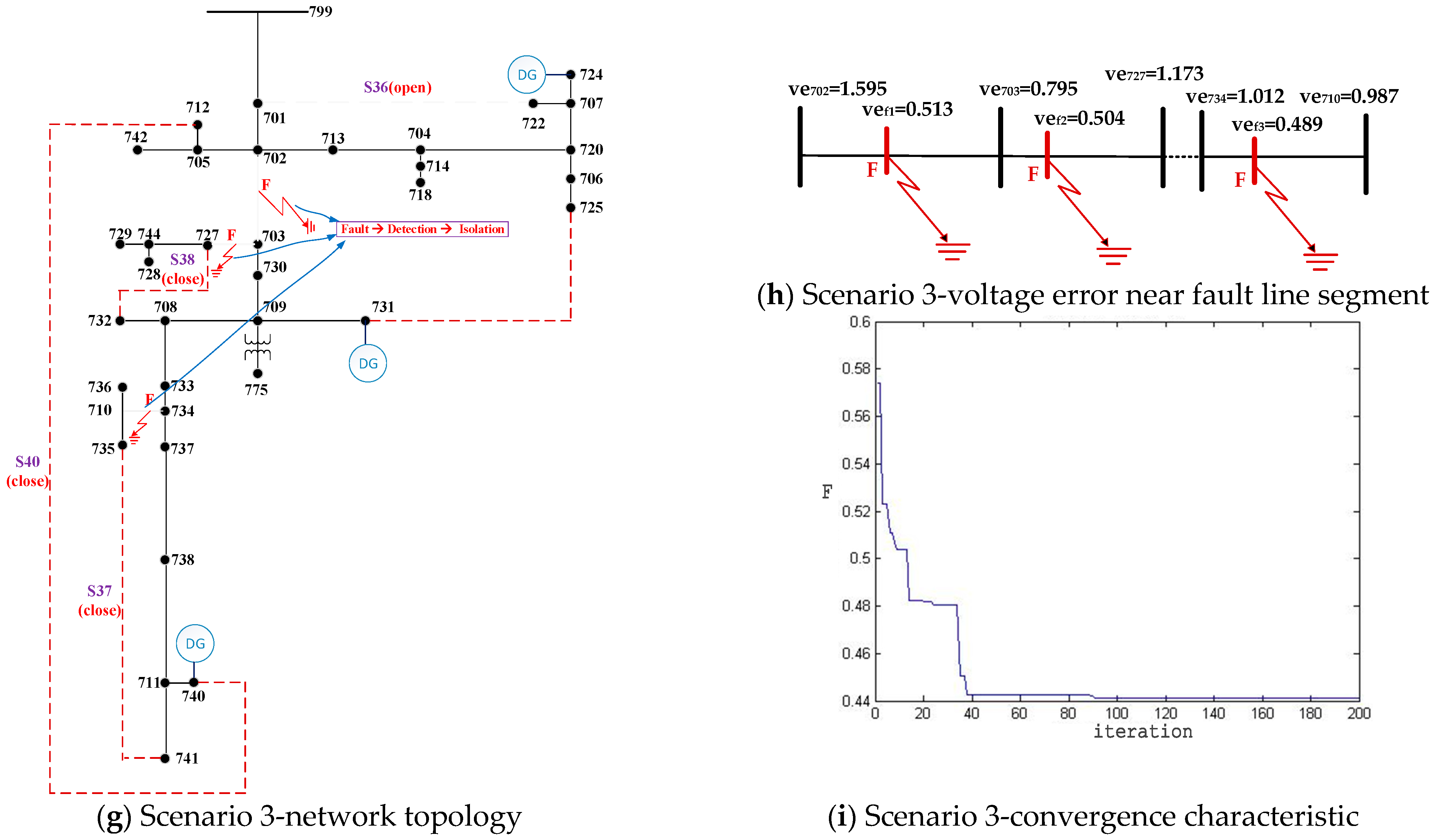
- Scenario 3: A triple-point fault in the line segment is assumed. The multiple fault points are between buses 702 and 703, buses 727 and 703, and buses 710 and 734. This fault is used to simulate power generation less than the load demand in the downstream islanded area. Load shedding is required for this situation.
5.2. Grid-Tied Operation
5.3. Islanding Operation
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Lasseter, R.H. MicroGrids. IEEE Power Energy Mag. 2007, 5, 78–94. [Google Scholar]
- Nigim Khaled, A.; Lee, W.J. Micro Grid Integration Opportunities and Challenges. In Proceedings of the IEEE Power Engineering Society General Meeting, Tampa, FL, USA, 24–28 June 2007; pp. 1–6. [Google Scholar]
- Lasseter, R.H.; Paigi, P. Microgrid: A Conceptual Solution. In Proceedings of the IEEE Power Electronics Specialists Conference, Aachen, Germany, 20–25 June 2004; pp. 4285–4290. [Google Scholar]
- Xu, G.; Wu, S.; Tan, Y. Island Partition of Distribution System with Distributed Generators Considering Protection of Vulnerable Nodes. Appl. Sci. 2017, 7, 1057. [Google Scholar] [CrossRef] [Green Version]
- Orozco-Henao, C.; Suman Bretas, A.; Marín-Quintero, J.; Herrera-Orozco, A.; Pulgarín-Rivera, J.D.; Velez, J.C. Adaptive Impedance-Based Fault Location Algorithm for Active Distribution Networks. Appl. Sci. 2018, 8, 1563. [Google Scholar] [CrossRef] [Green Version]
- Zayandehroodi, H.; Mohamed, A.; Shareef, H.; Mohammadjafari, M. Determining exact fault location in a distribution network in presence of DGs using RBF neural networks. In Proceedings of the 2011 IEEE International Conference on Information Reuse & Integration, Las Vegas, NV, USA, 3–5 August 2011; pp. 424–438. [Google Scholar]
- Hany, F.H.; Youssef, T.; Cintuglu, M.H.; Mohammed, O.A. Multi-Agent-Based Technique for Fault Location, Isolation, and Service Restoration. IEEE Trans. Ind. Appl. 2017, 53, 1841–1851. [Google Scholar]
- Shahid, M.U.; Khan, M.M.; Hashmi, K.; Habib, S.; Jiang, H.; Tang, H. A Control Methodology for Load Sharing System Restoration in Islanded DC Micro Grid with Faulty Communication Links. Electronics 2018, 7, 90. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Z.; Ooi, B.T. Feasibility of fast restoration of power systems by micro-grids. IET Gener. Transm. Distrib. 2017, 12, 126–132. [Google Scholar] [CrossRef]
- Le, D.P.; Bui, D.M.; Ngo, C.C.; Le, A.M.T. FLISR Approach for Smart Distribution Networks Using E-Terra Software—A Case Study. Energies 2018, 11, 3333. [Google Scholar] [CrossRef] [Green Version]
- IEEE Std C37.114. IEEE Guide for Determining Fault Location on AC Transmission and Distribution Lines; IEEE: Piscataway, NJ, USA, 2005; pp. 1–36. [Google Scholar]
- EPRI. Distribution Fault Location: 2004 Field Data and Analysis; Electric Power Research Institute, Inc.: Palo Alto, CA, USA, 2006. [Google Scholar]
- Gush, T.; Bukhari, S.B.A.; Haider, R.; Admasie, S.; Oh, Y.U.; Cho, G.Y.; Kim, C.H. Fault detection and location in a microgrid using mathematical morphology and recursive least square methods. Int. J. Electr. Power Energy Syst. 2018, 102, 324–331. [Google Scholar] [CrossRef]
- Zheng, X.; Zeng, Y.; Zhao, M.; Venkatesh, B. Early Identification and Location of Short-Circuit Fault in Grid-Connected AC Microgrid. IEEE Trans. Smart Grid 2021, 2869–2878. [Google Scholar] [CrossRef]
- Hong, Y.; Cabatac, M.T.A.M. Fault Detection, Classification, and Location by Static Switch in Microgrids Using Wavelet Transform and Taguchi-Based Artificial Neural Network. IEEE Syst. J. 2019, 14, 2725–2735. [Google Scholar] [CrossRef]
- Wang, D.; Ning, Y.; Zhang, C. An Effective Ground Fault Location Scheme Using Unsynchronized Data for Multi-Terminal Lines. Energies 2018, 11, 2957. [Google Scholar] [CrossRef] [Green Version]
- Yang, Q.; Jiang, L.; Ehsan, A.; Gao, Y.; Guo, S. Robust Power Supply Restoration for Self-Healing Active Distribution Networks Considering the Availability of Distributed Generation. Energies 2018, 11, 210. [Google Scholar] [CrossRef] [Green Version]
- Gush, T.; Bukhari, S.B.A.; Mehmood, K.K.; Admasie, S.; Kim, J.-S.; Kim, C.-H. Intelligent Fault Classification and Location Identification Method for Microgrids Using Discrete Orthonormal Stockwell Transform-Based Optimized Multi-Kernel Extreme Learning Machine. Energies 2019, 12, 4504. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Wang, J. Service restoration based on AMI and networked MGs under extreme weather events. IET Gener. Transm. Distrib. 2017, 11, 401–408. [Google Scholar] [CrossRef]
- Wang, J.; Mu, L.; Zhang, F.; Zhang, X. A Parallel Restoration for Black Start of Microgrids Considering Characteristics of Distributed Generations. Energies 2018, 11, 1. [Google Scholar] [CrossRef] [Green Version]
- Ahmed, A.S.; Attia, M.A.; Hamed, N.M.; Abdelaziz, A.Y. Abdelaziz, Modern optimization algorithms for fault location estimation in power systems. Eng. Sci. Technol. Int. J. 2017, 20, 1475–1485. [Google Scholar] [CrossRef]
- Li, L.L.; Yang, Y.F.; Wang, C.H.; Lin, K.P. Biogeography-based optimization based on population competition strategy for solving the substation location problem. Expert Syst. Appl. 2018, 97, 290–302. [Google Scholar] [CrossRef]
- Abdelwanis, M.I.; Abaza, A.; El-Sehiemy, R.A.; Ibrahim, M.N.; Rezk, H. Parameter Estimation of Electric Power Transformers Using Coyote Optimization Algorithm with Experimental Verification. IEEE Access 2020, 8, 50036–50044. [Google Scholar] [CrossRef]
- Niccolai, A.; Bettini, L.; Zich, R. Optimization of electric vehicles charging station deployment by means of evolutionary algorithms. Int. J. Intell. Syst. 2021. [Google Scholar] [CrossRef]
- Chen, T.H.; Yang, N.C. Three-phase power-flow by direct ZBR method for unbalanced radial distribution systems. IET Gener. Transm. Distrib. 2009, 3, 903–910. [Google Scholar] [CrossRef]
- Teng, J.H. A network-topology based three: Phase load flow for distribution systems. Proc. Natl. Sci. Counc. ROC (A) 2000, 24, 259–264. [Google Scholar]
- Barker, P.; Mello, R.W. Determining the impact of distributed generation on power systems: Part 1—Radial power systems. In Proceedings of the 2000 Power Engineering Society Summer Meeting, Seattle, WA, USA, 16–20 July 2000; pp. 1645–1658. [Google Scholar]
- Kennedy, J.; Eberhart, R.C. Particle swarm optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995; pp. 1942–1948. [Google Scholar]
- Eberhart, R.C.; Kennedy, J. A new optimizer using particle swarm theory. In Proceedings of the Sixth International Symposium on Micro Machine and Human Science, Nagoya, Japan, 4–6 October 1995; pp. 39–43. [Google Scholar]
- Distribution Test Feeders. Available online: http://ewh.ieee.org/soc/pes/dsacom/testfeeders/index.html (accessed on 1 May 2019).
- Dugan, R.C.; McDermott, T.E. An Open Source Platform for Collaborating on Smart Grid Research. In Proceedings of the 2011 IEEE Power and Energy Society General Meeting, Detroit, MI, USA, 24–28 July 2011; pp. 1–7. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Switch No. | From Bus | To Bus | Length(m) | Voltage | Phase |
|---|---|---|---|---|---|
| S36 | 701 | 722 | 91.44 | 4.8 kV | ABC |
| S37 | 741 | 735 | 152.40 | 4.8 kV | ABC |
| S38 | 727 | 732 | 60.96 | 4.8 kV | ABC |
| S39 | 725 | 731 | 243.84 | 4.8 kV | ABC |
| S40 | 712 | 740 | 457.20 | 4.8 kV | ABC |
| Scenario | Fault Type | Fault Point between Two Buses |
|---|---|---|
| Scenario 1 | Three-phase short-circuit bolted fault | 702–703 |
| Scenario 2 | Three-phase short-circuit bolted fault | 702–703, 727–703 |
| Scenario 3 | Three-phase short-circuit bolted fault | 702–703, 727–703, 710–734 |
| Scenario | Fault Location | Switch | Restoration(%) | Power Loss | Radial Type | ||
|---|---|---|---|---|---|---|---|
| Open | Close | Operation Number | |||||
| 1 | 702–703 | S(708–709) | S39 S40 | 3 | 100% | 62.67 kW | Yes |
| 2 | 702–703 727–703 | S(708–733) | S38 S39 S40 | 4 | 100% | 61.47 kW | Yes |
| 3 | 702–703 727–703 710–734 | S(708–733) | S37 S38 S39 S40 | 5 | 100% | 60.46 kW | Yes |
| Scenario | Fault Location | Switch | Load Shedding Bus | Restoration (%) | Power Loss | Radial Type | ||
|---|---|---|---|---|---|---|---|---|
| Open | Close | Operation Number | ||||||
| 1 | 702–703 | - | S39 | 1 | 701 722 728 735 736 737 738 | 83.61% | 22.27 kW | Yes |
| 2 | 702–703 727–703 | - | S38 S39 | 2 | 83.61% | 22.41 kW | Yes | |
| 3 | 702–703 727–703 710–734 | - | S37 S38 S39 | 3 | 83.61% | 22.40 kW | Yes | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, W.-C.; Huang, W.-T.; Yao, K.-C.; Chen, H.-T.; Ma, C.-C. Fault Location and Restoration of Microgrids via Particle Swarm Optimization. Appl. Sci. 2021, 11, 7036. https://doi.org/10.3390/app11157036
Lin W-C, Huang W-T, Yao K-C, Chen H-T, Ma C-C. Fault Location and Restoration of Microgrids via Particle Swarm Optimization. Applied Sciences. 2021; 11(15):7036. https://doi.org/10.3390/app11157036
Chicago/Turabian StyleLin, Wei-Chen, Wei-Tzer Huang, Kai-Chao Yao, Hong-Ting Chen, and Chun-Chiang Ma. 2021. "Fault Location and Restoration of Microgrids via Particle Swarm Optimization" Applied Sciences 11, no. 15: 7036. https://doi.org/10.3390/app11157036
APA StyleLin, W.-C., Huang, W.-T., Yao, K.-C., Chen, H.-T., & Ma, C.-C. (2021). Fault Location and Restoration of Microgrids via Particle Swarm Optimization. Applied Sciences, 11(15), 7036. https://doi.org/10.3390/app11157036