
Effects of Visual Active Deceleration Devices on Controlling Vehicle Speeds in a Long Downhill Tunnel of an Expressway



Abstract
:1. Background
2. Materials and Experimental Methods
2.1. Tunnel
2.2. Visual Active Deceleration Devices
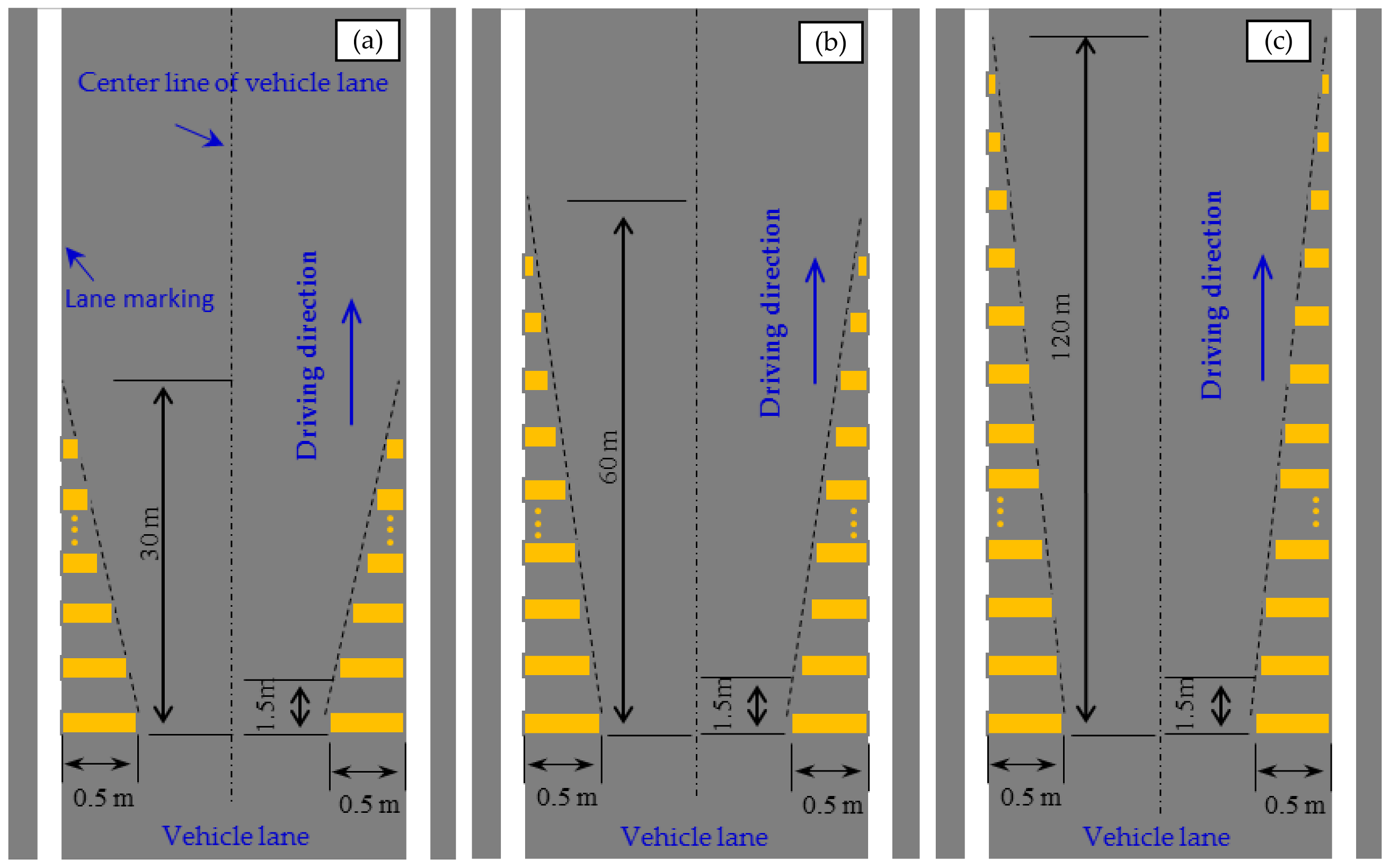
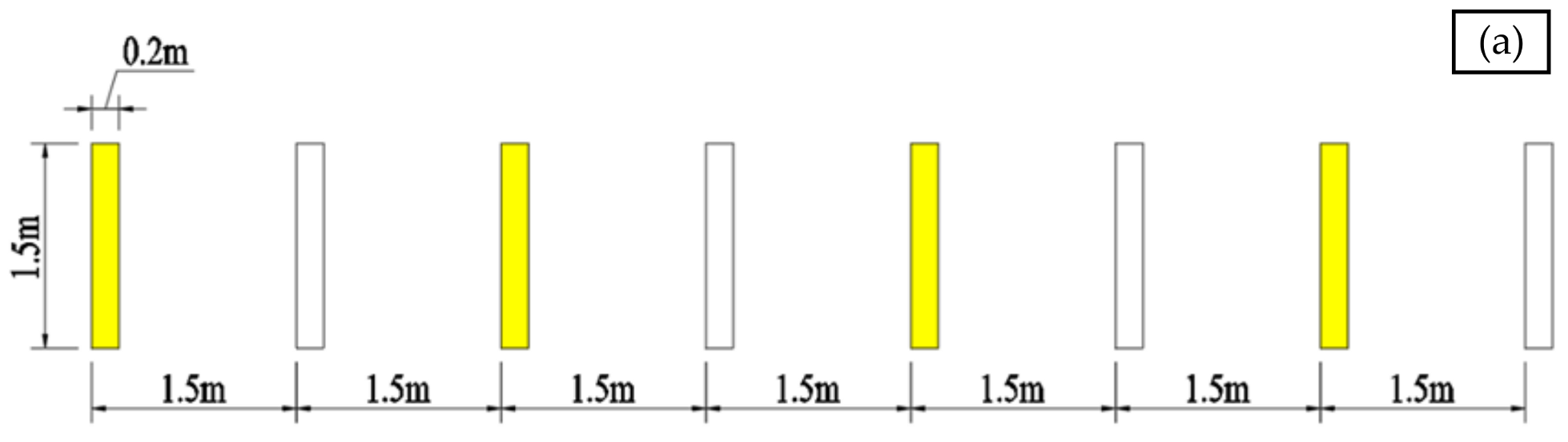
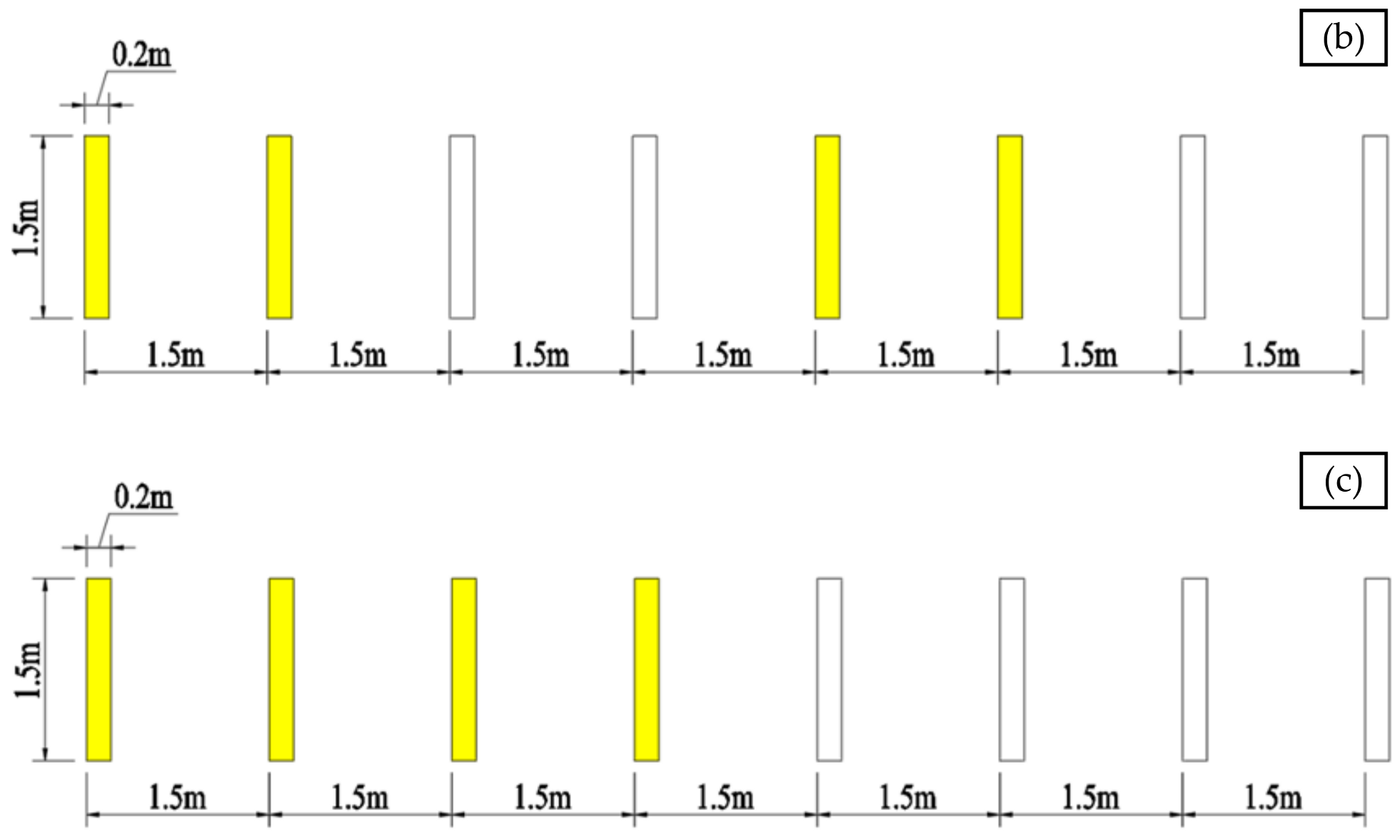
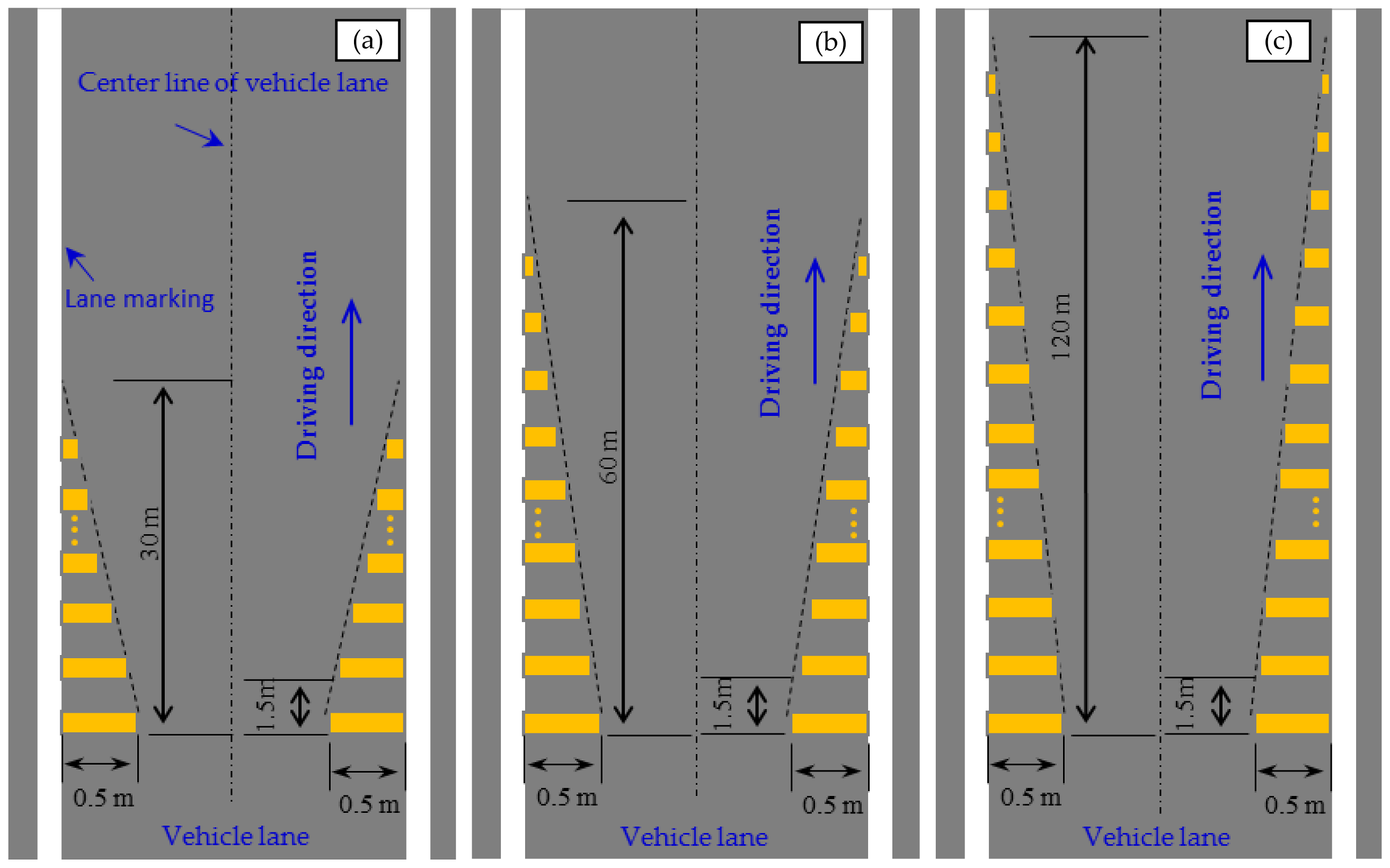
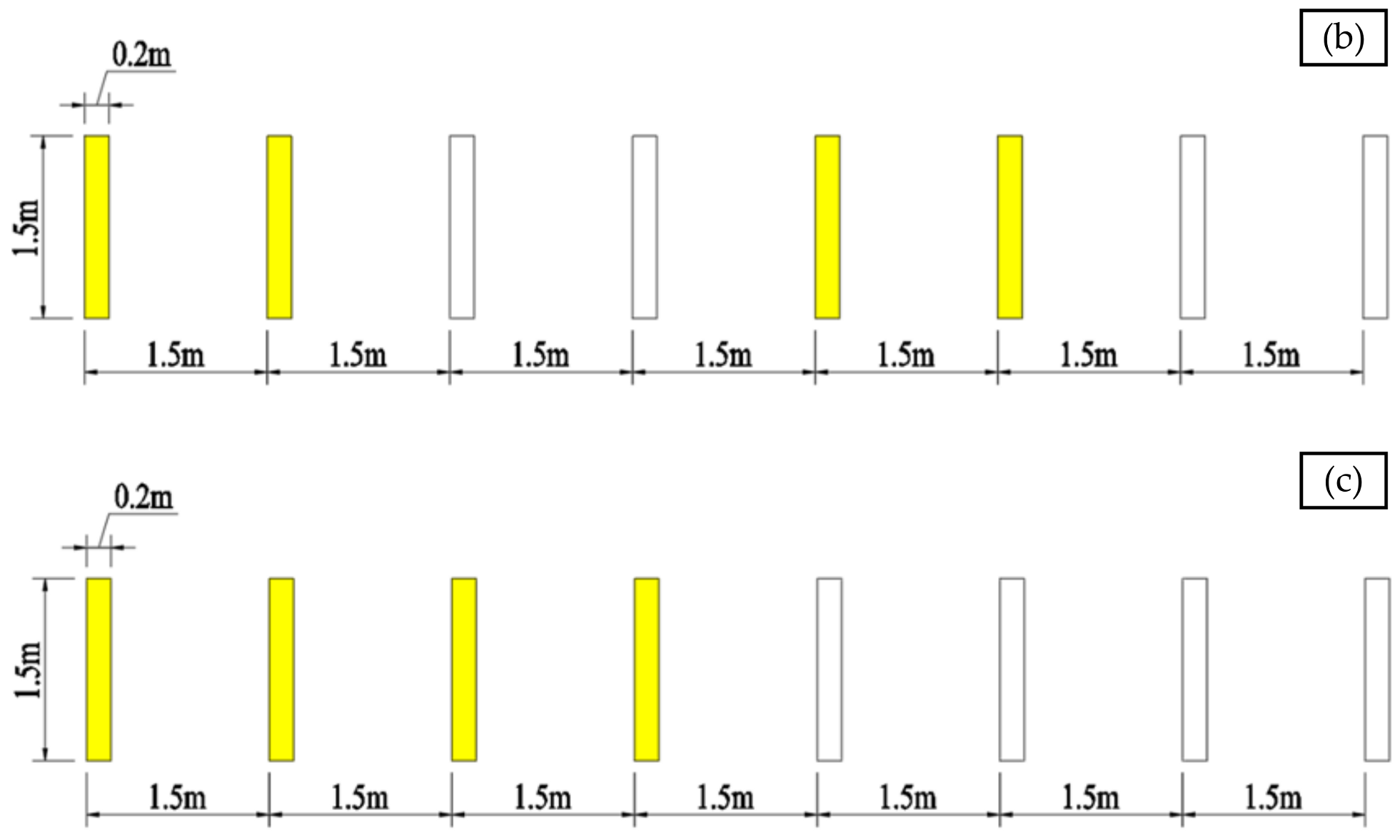
2.2.1. RPIDLs near Tunnel Entrance
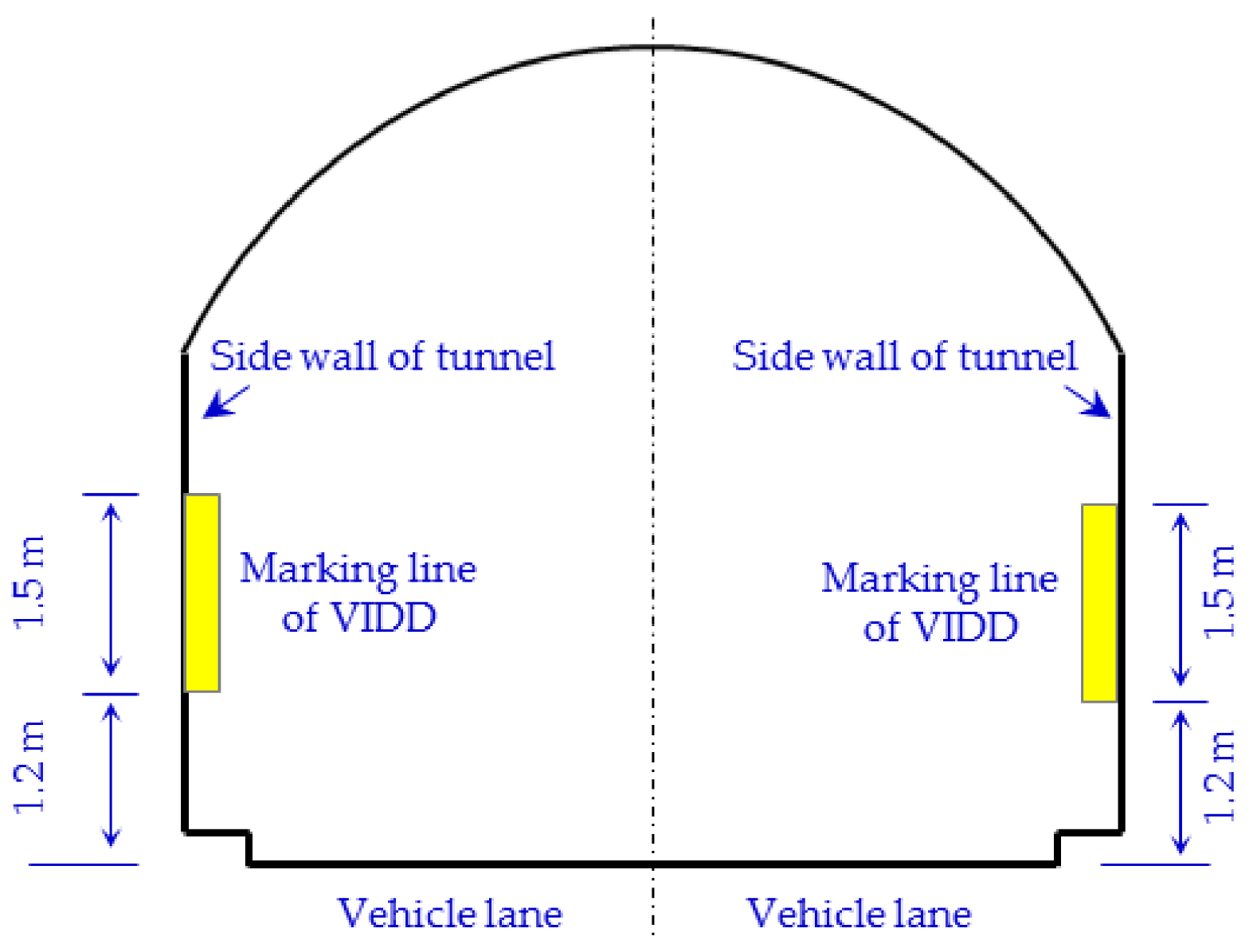
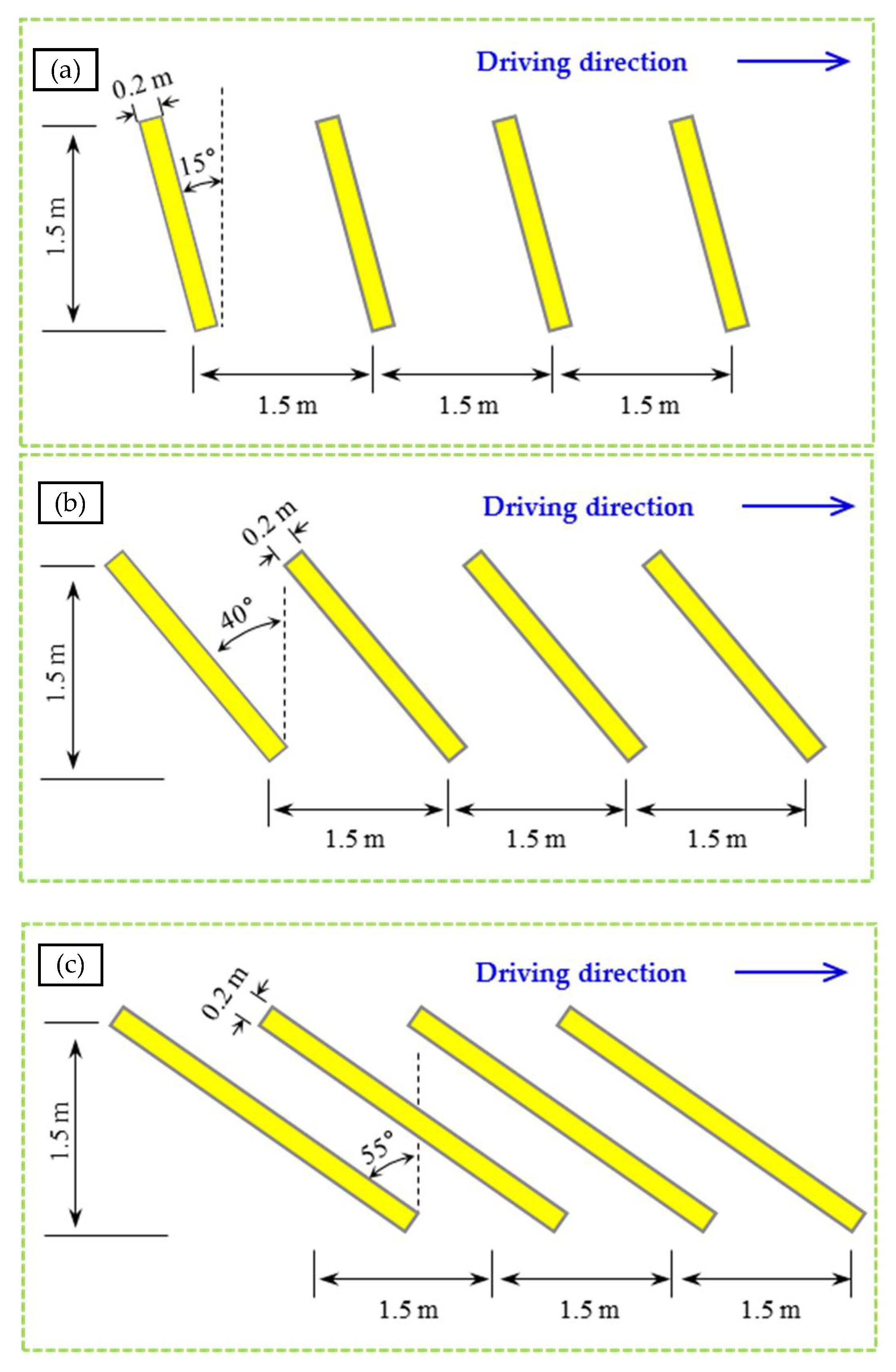
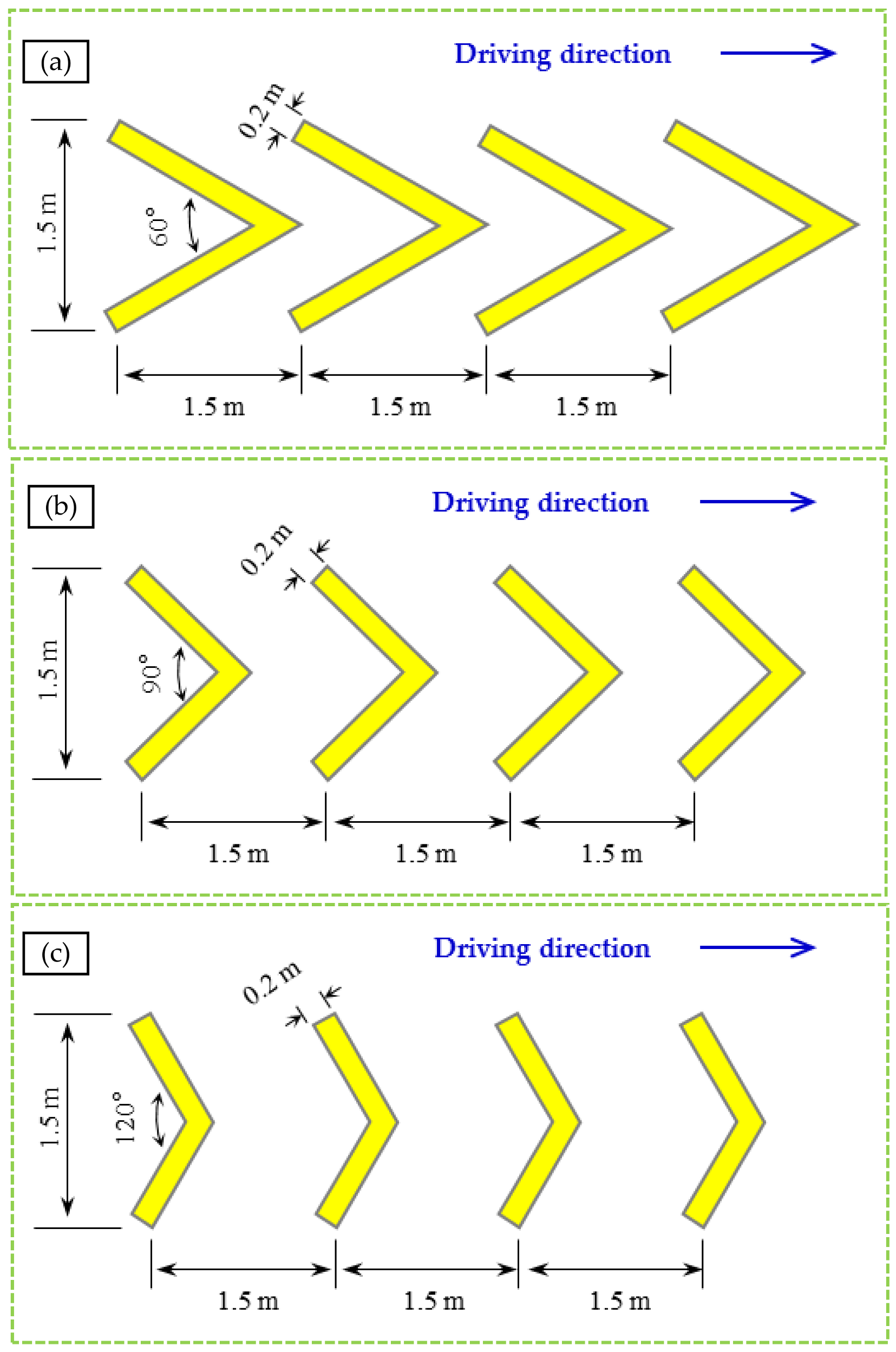
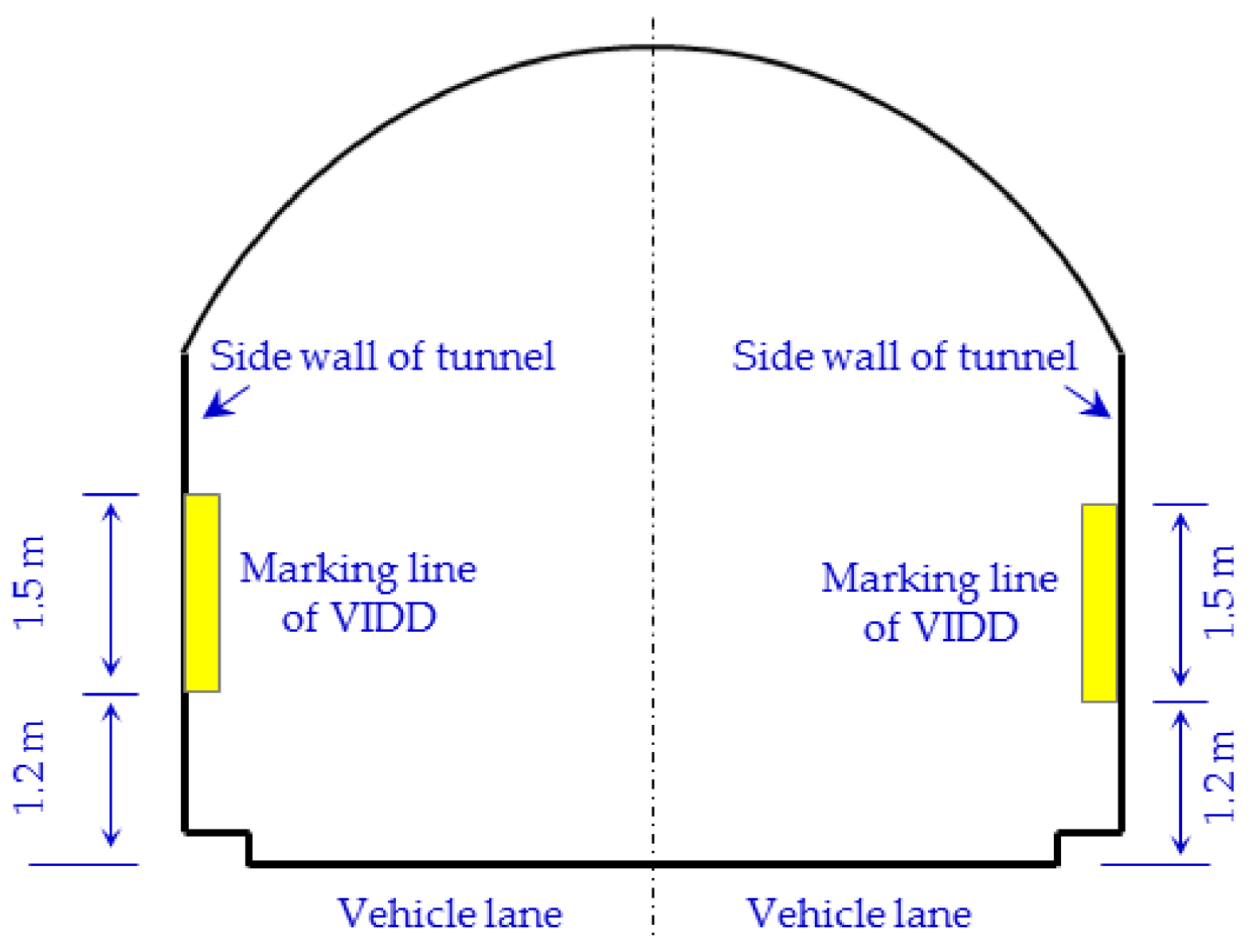
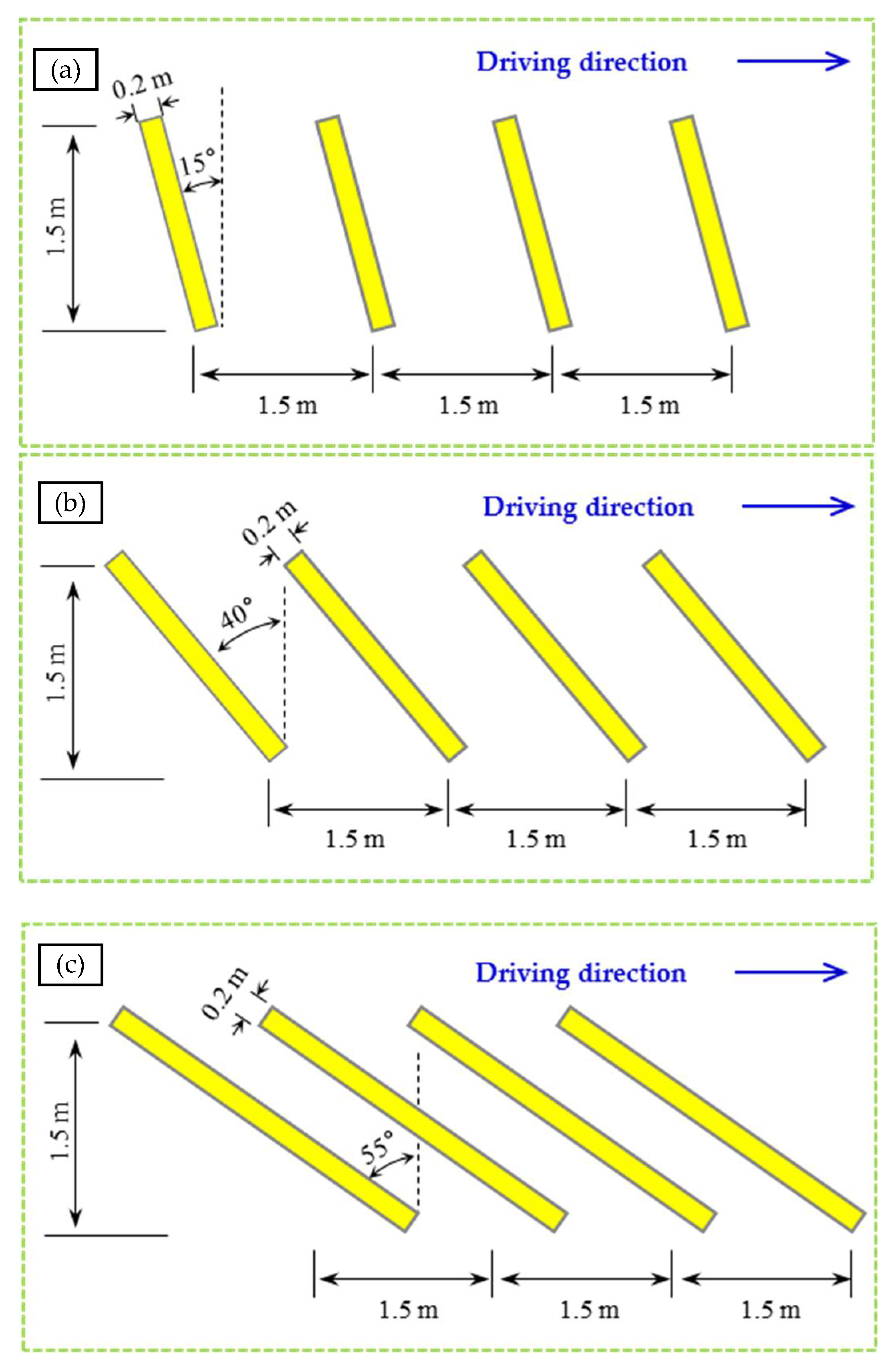
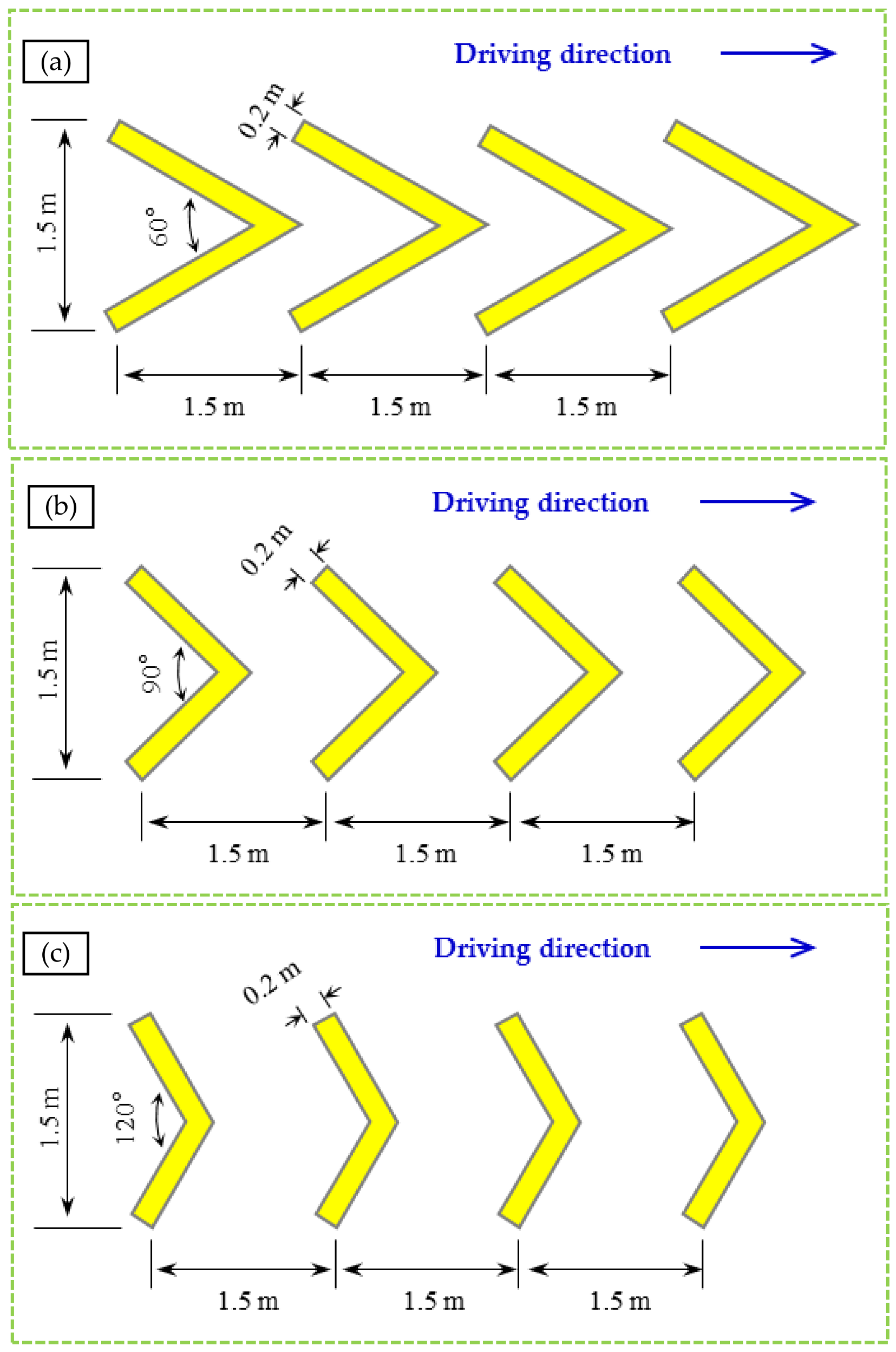
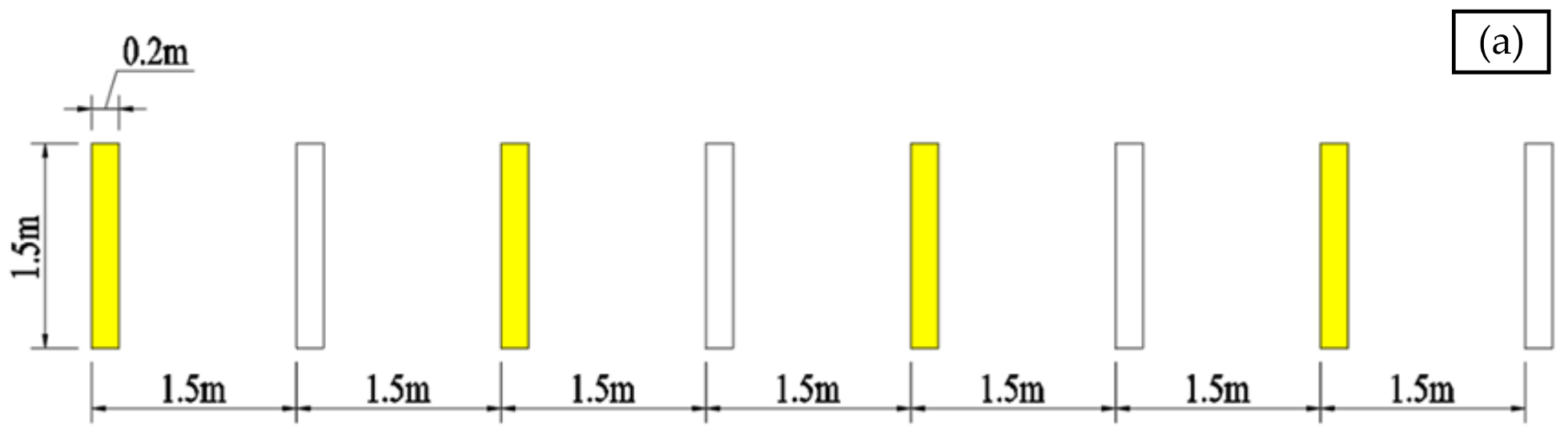
2.2.2. VIDD on Side Wall in Middle of Tunnel
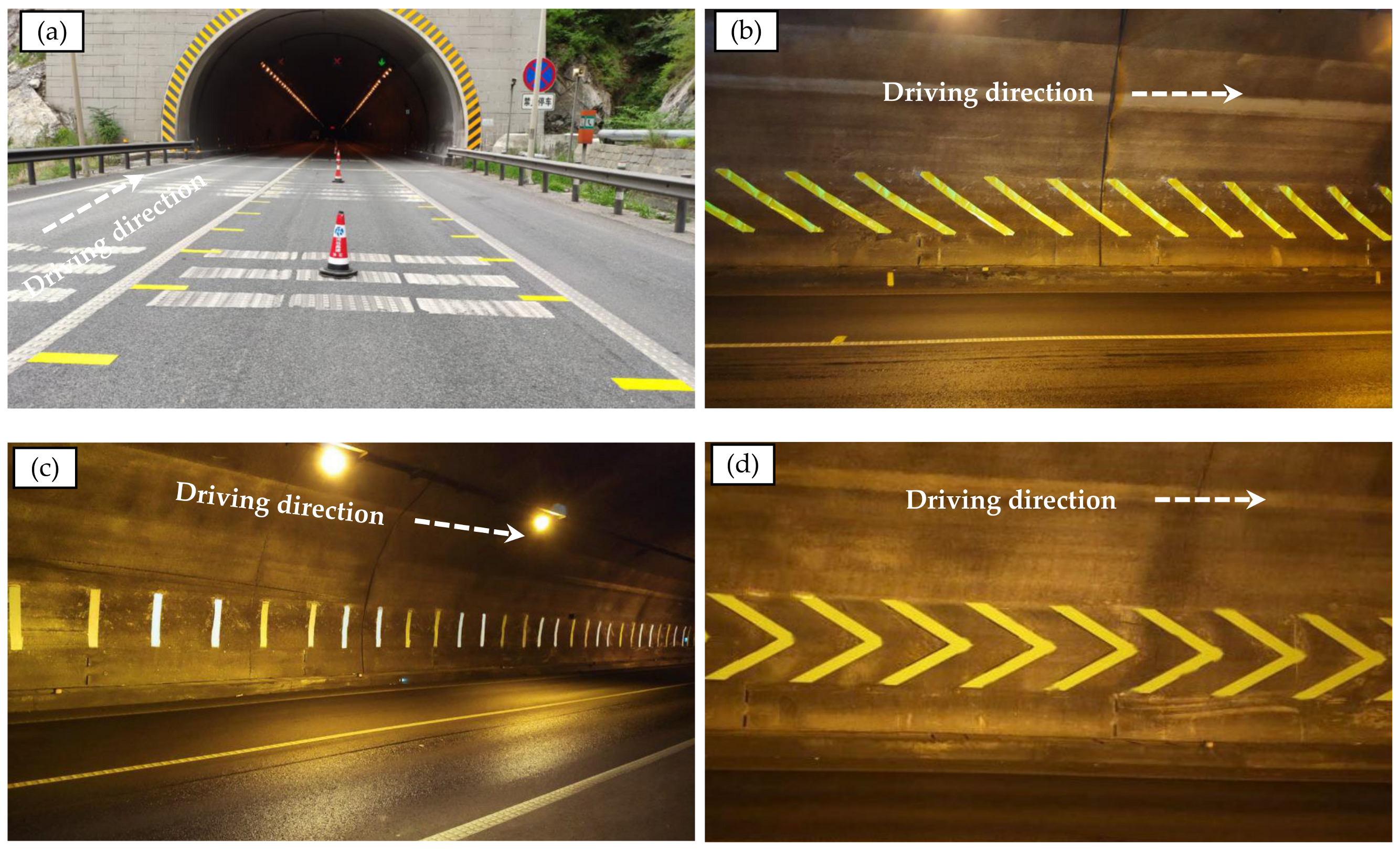
2.3. Photographs of Actual RPIDLs and VIDDs
2.4. Methods for Measuring Vehicle Speeds
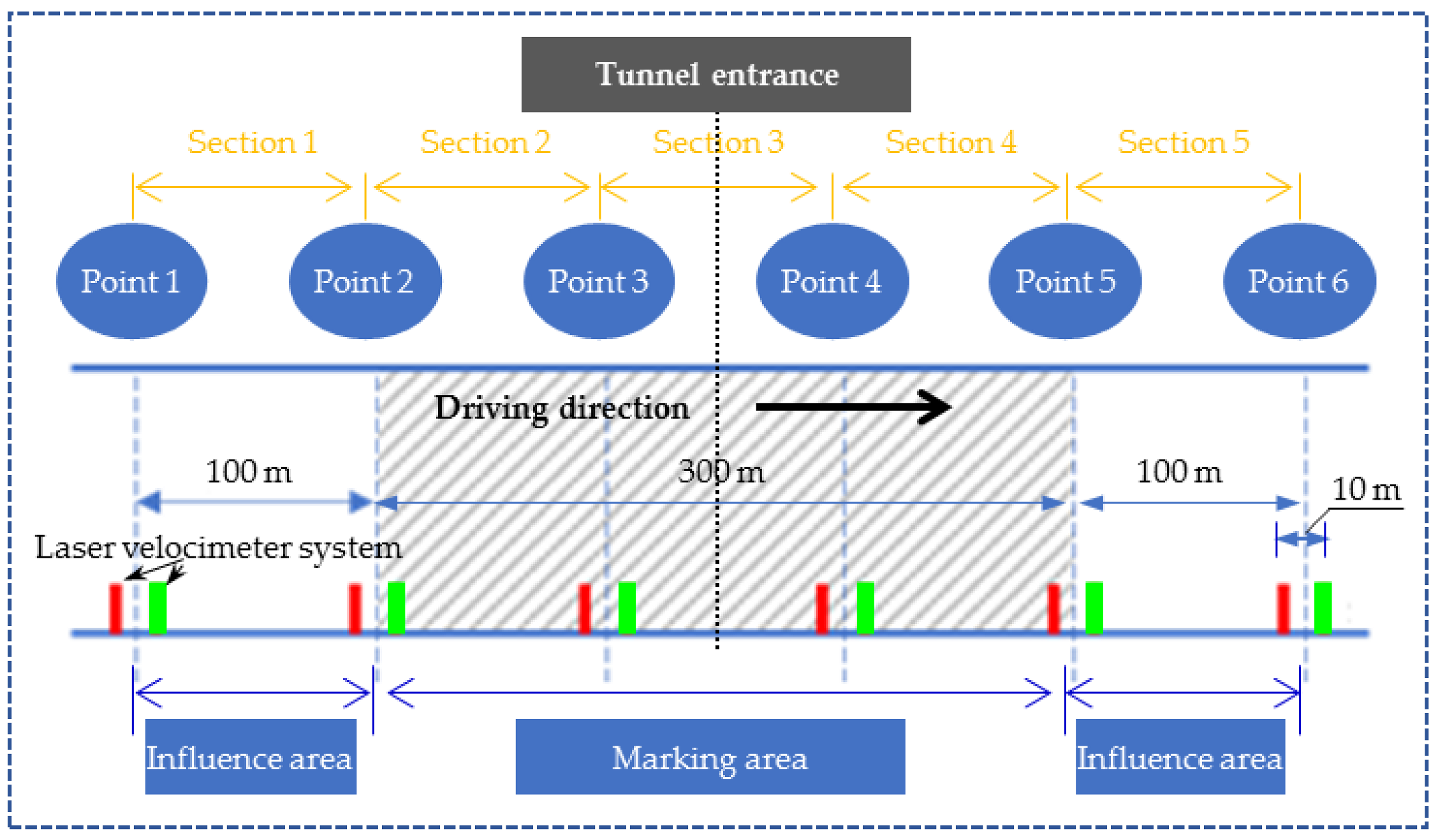
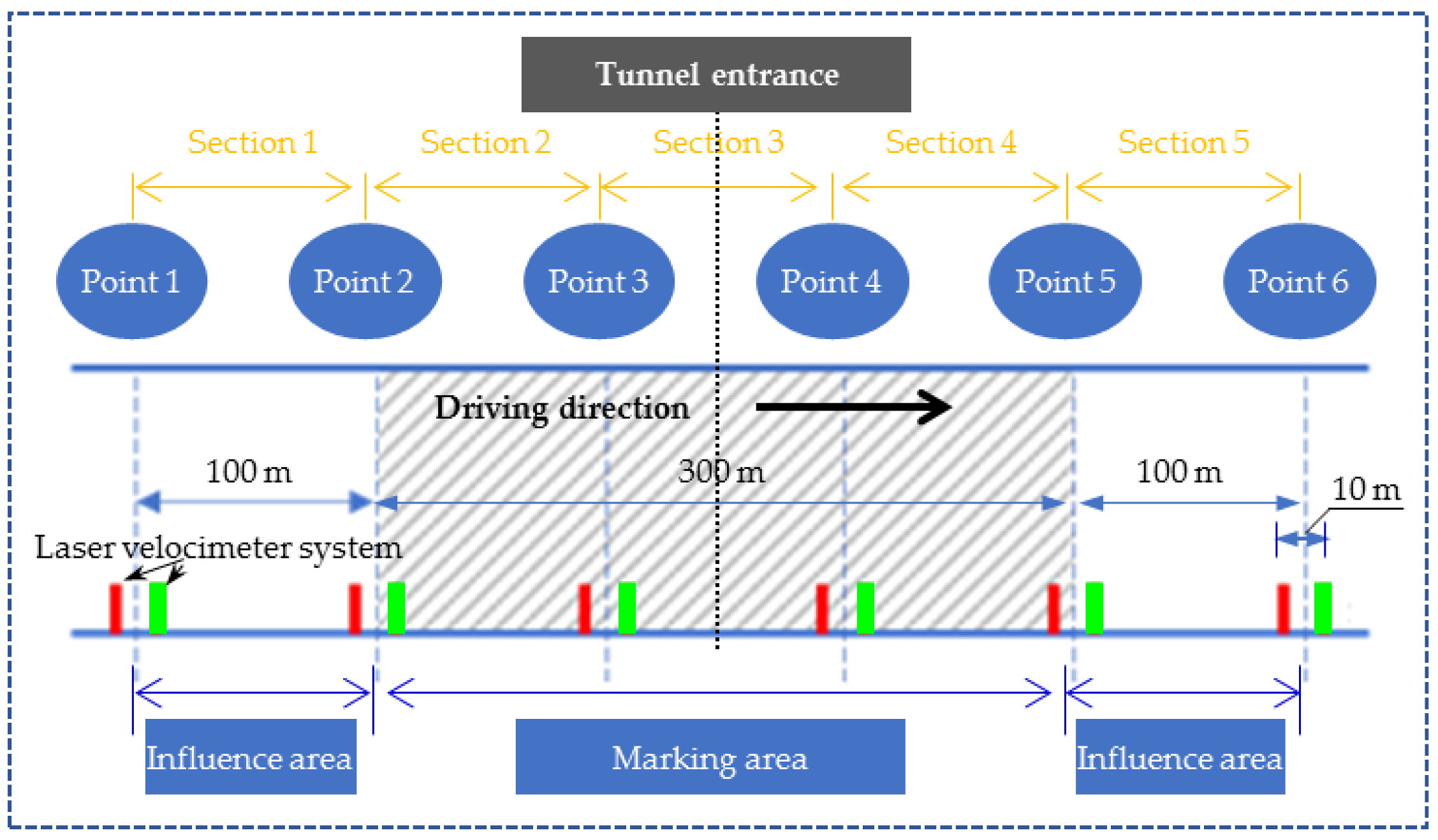
2.4.1. Measuring Vehicle Speeds Controlled by RPIDLs
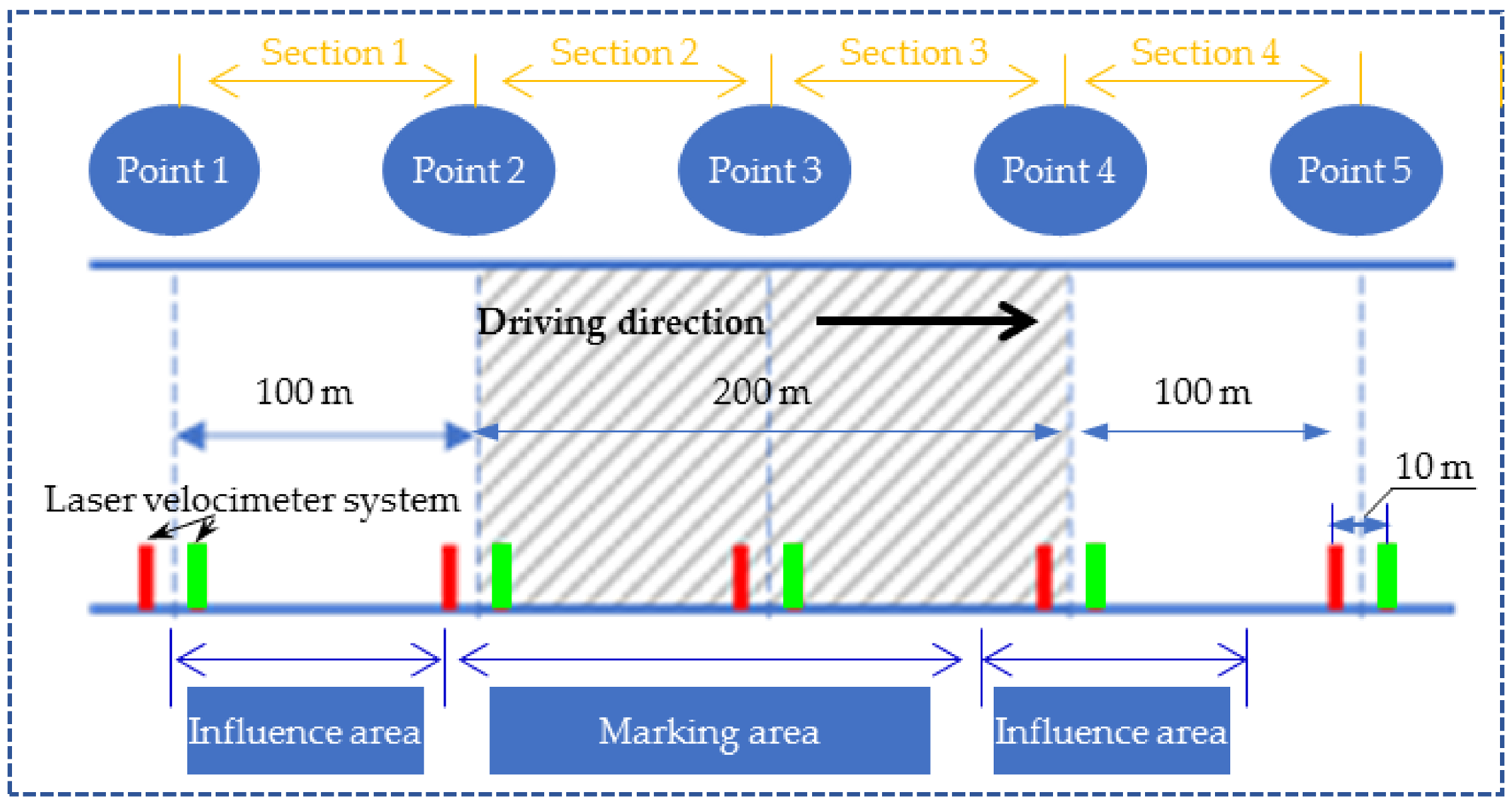
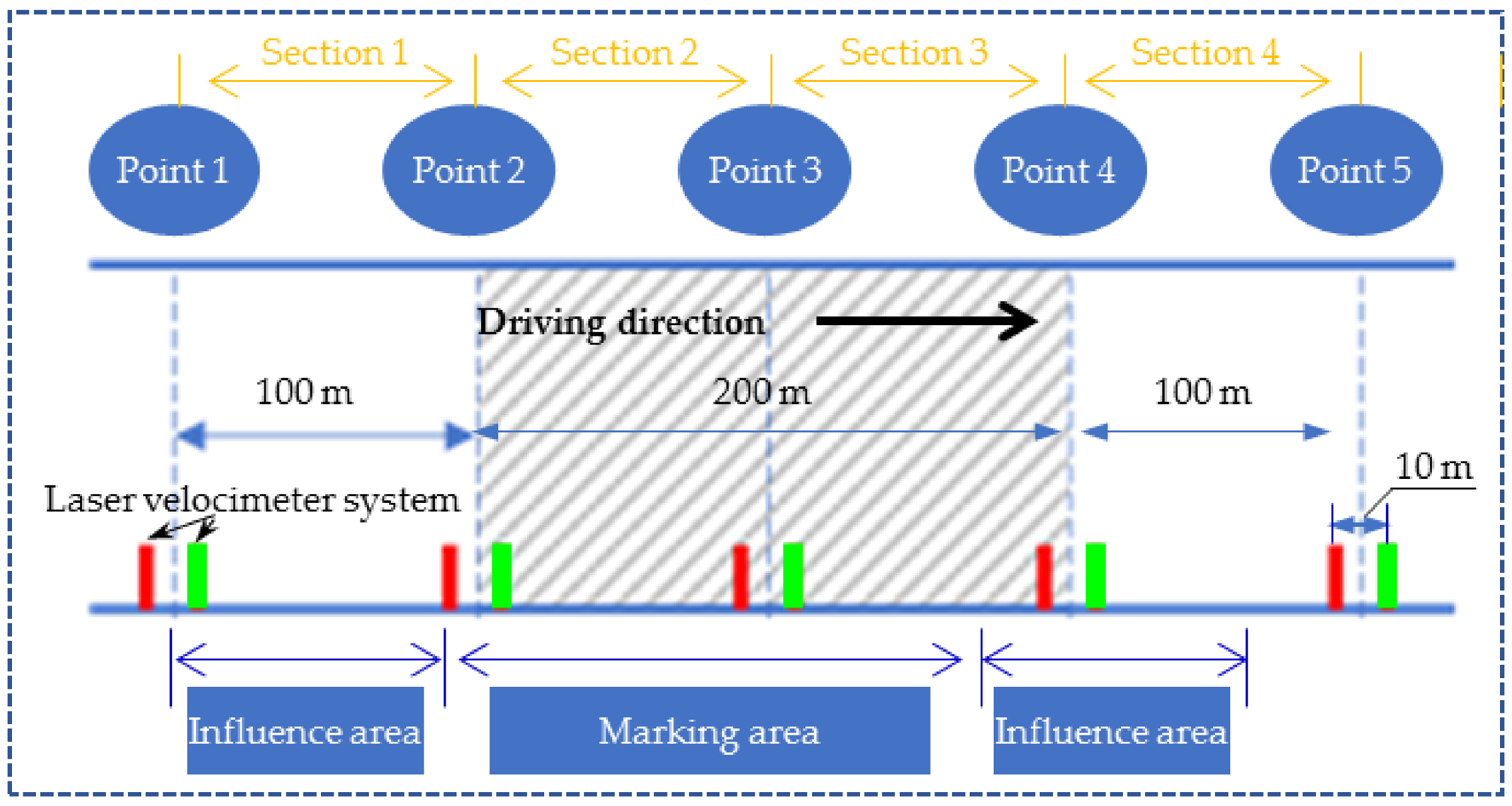
2.4.2. Measuring Vehicle Speeds Controlled by VIDD
3. Results and Discussion
3.1. Effects of RPIDLs on Vehicle Speeds at Entrance of Long Downhill Tunnel
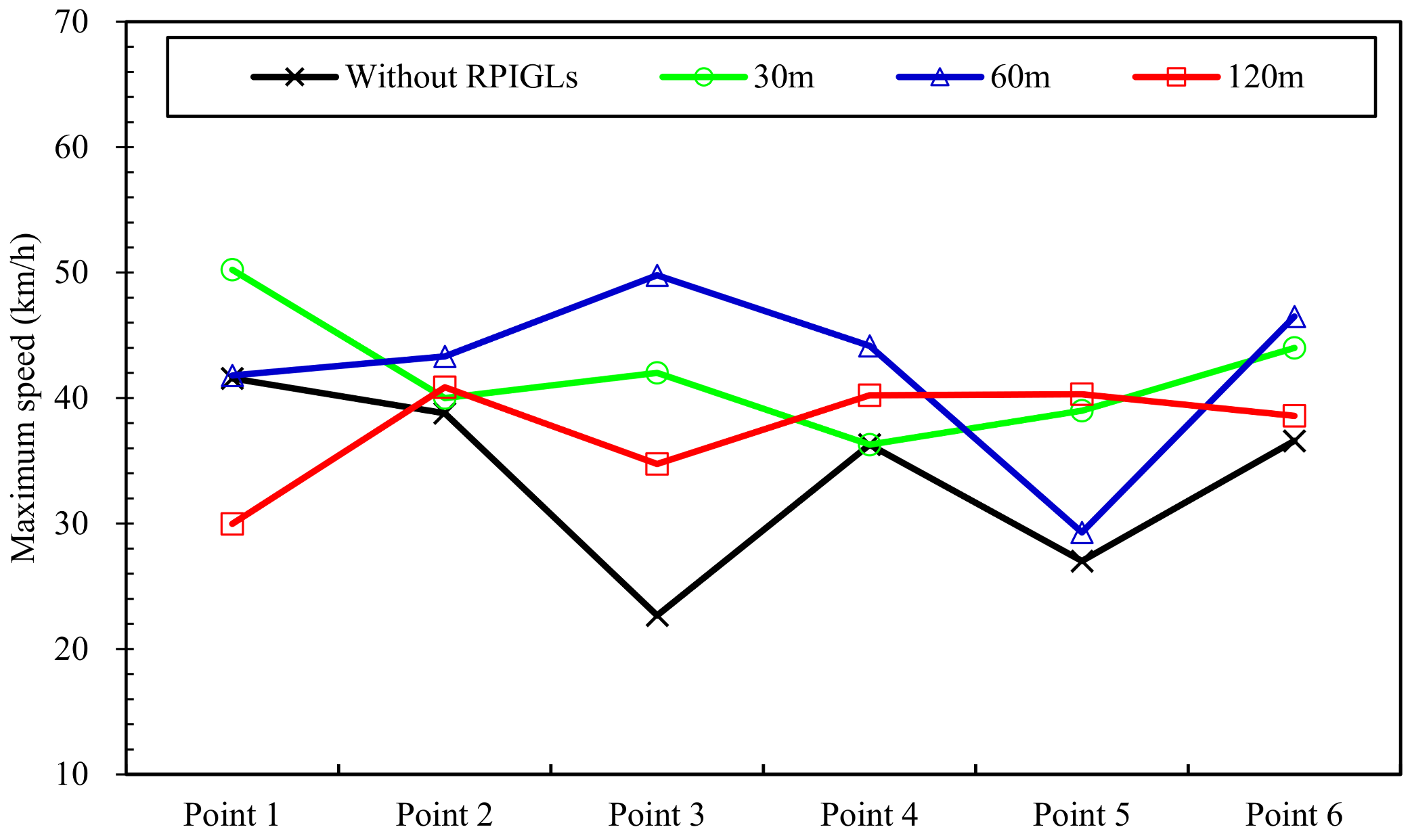
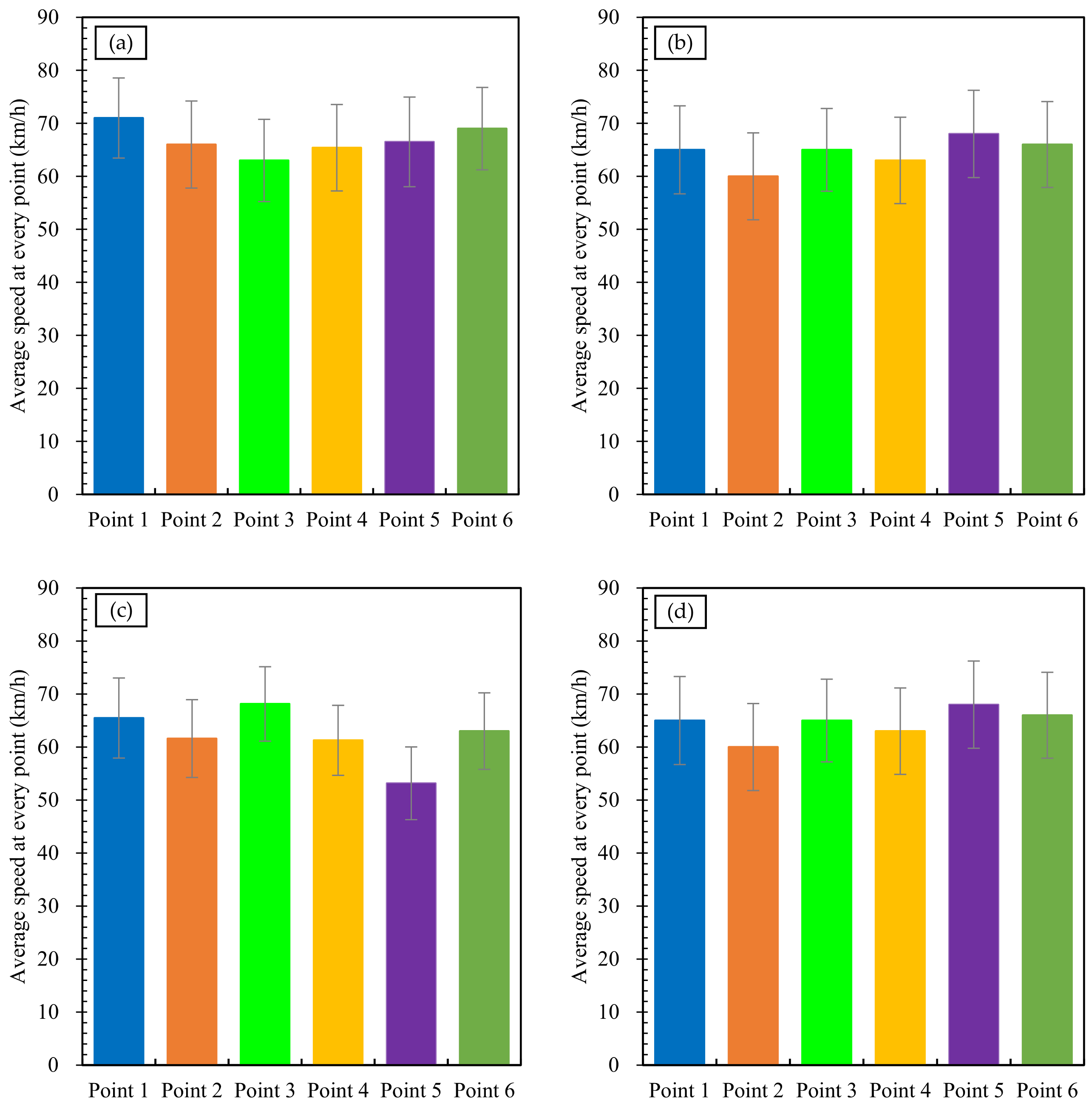
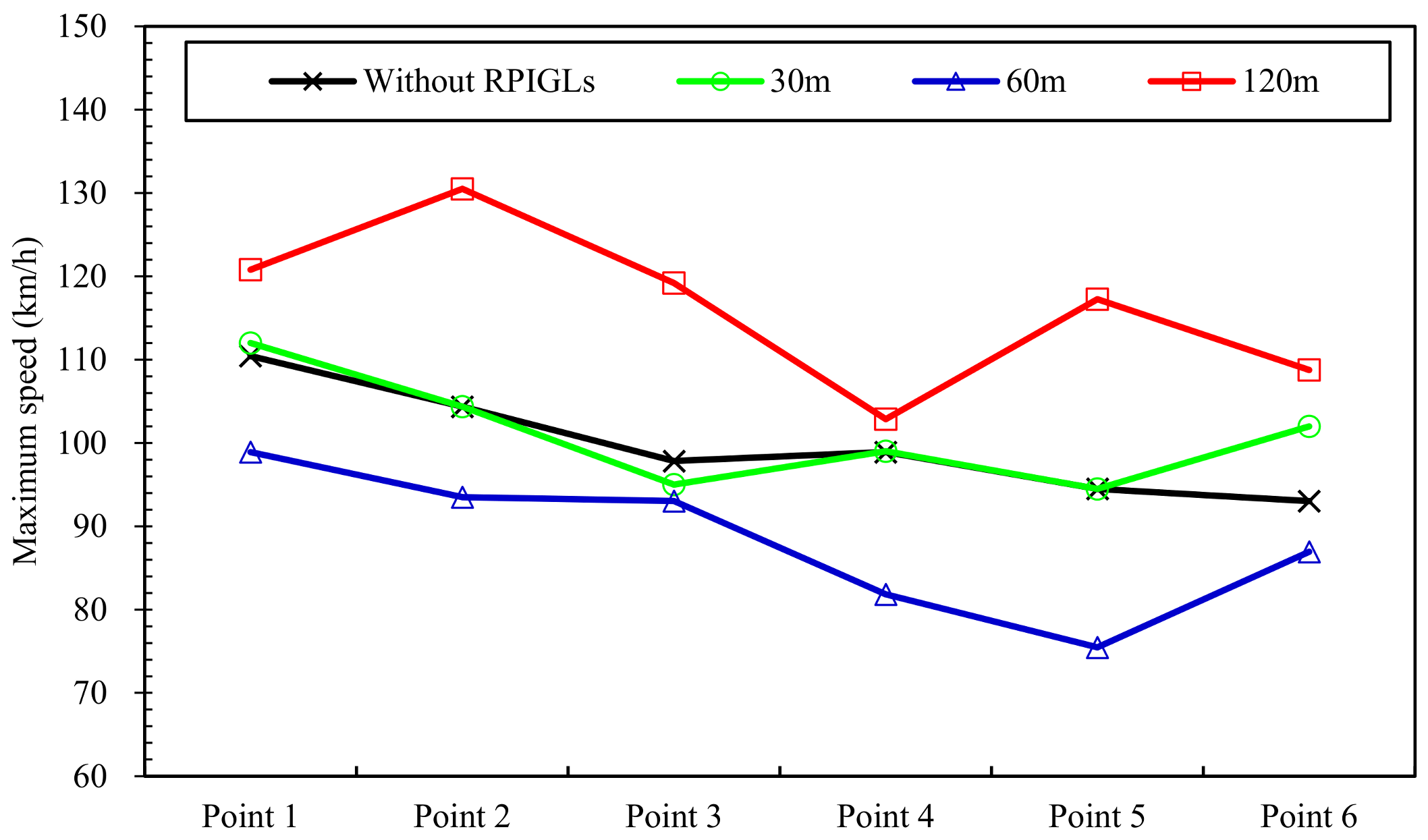
3.1.1. Effect on Vehicle Speeds at Different Observation Points
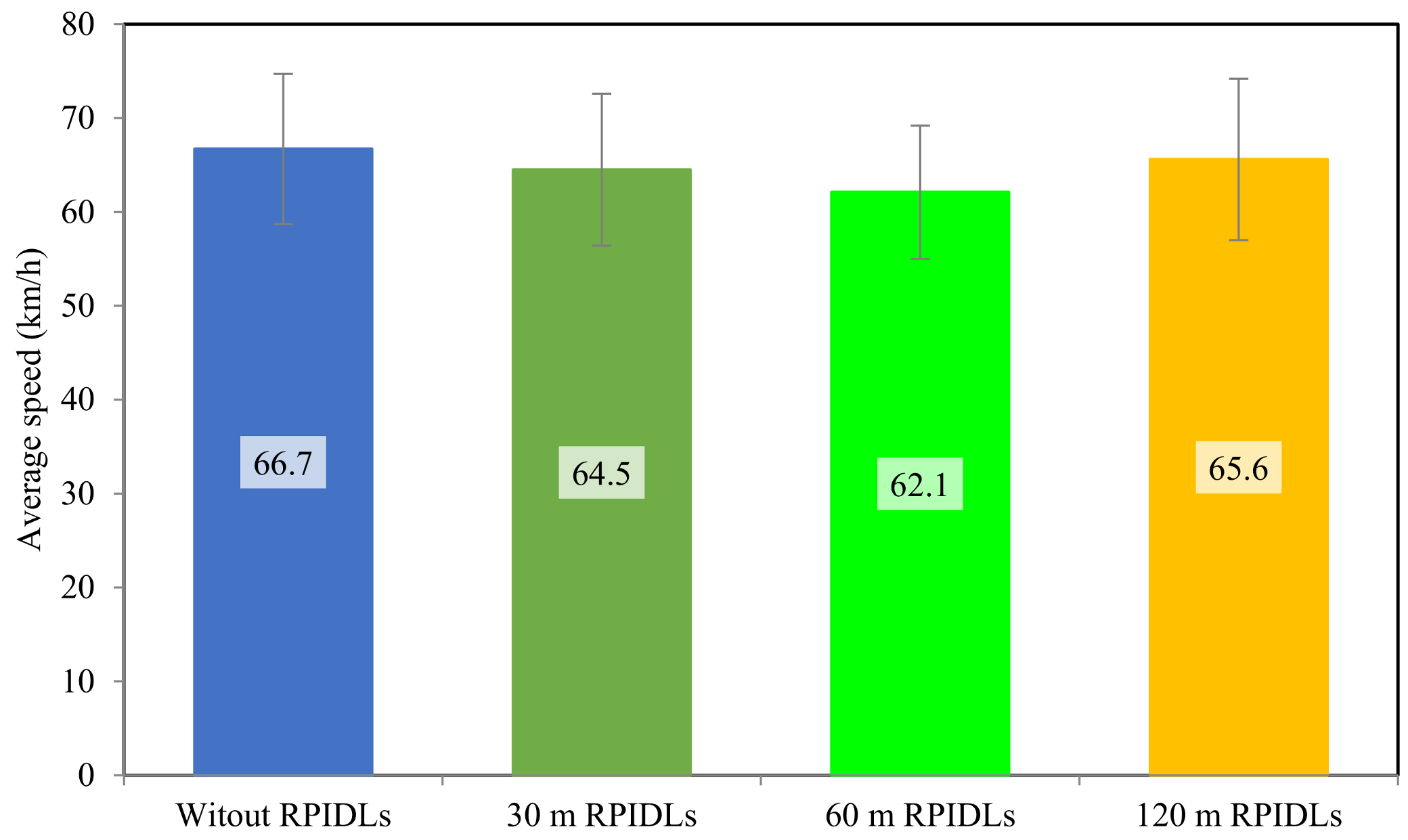
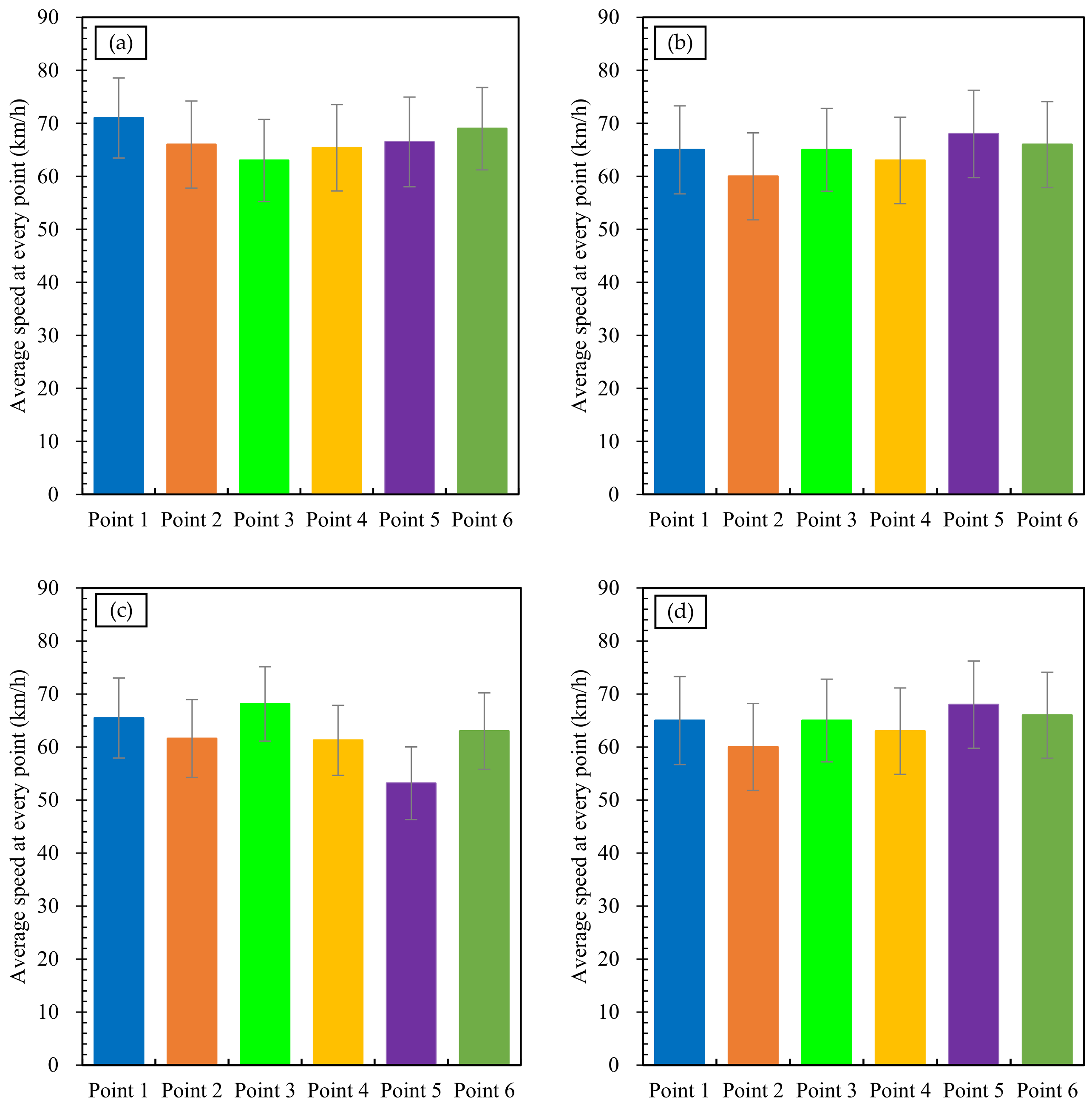
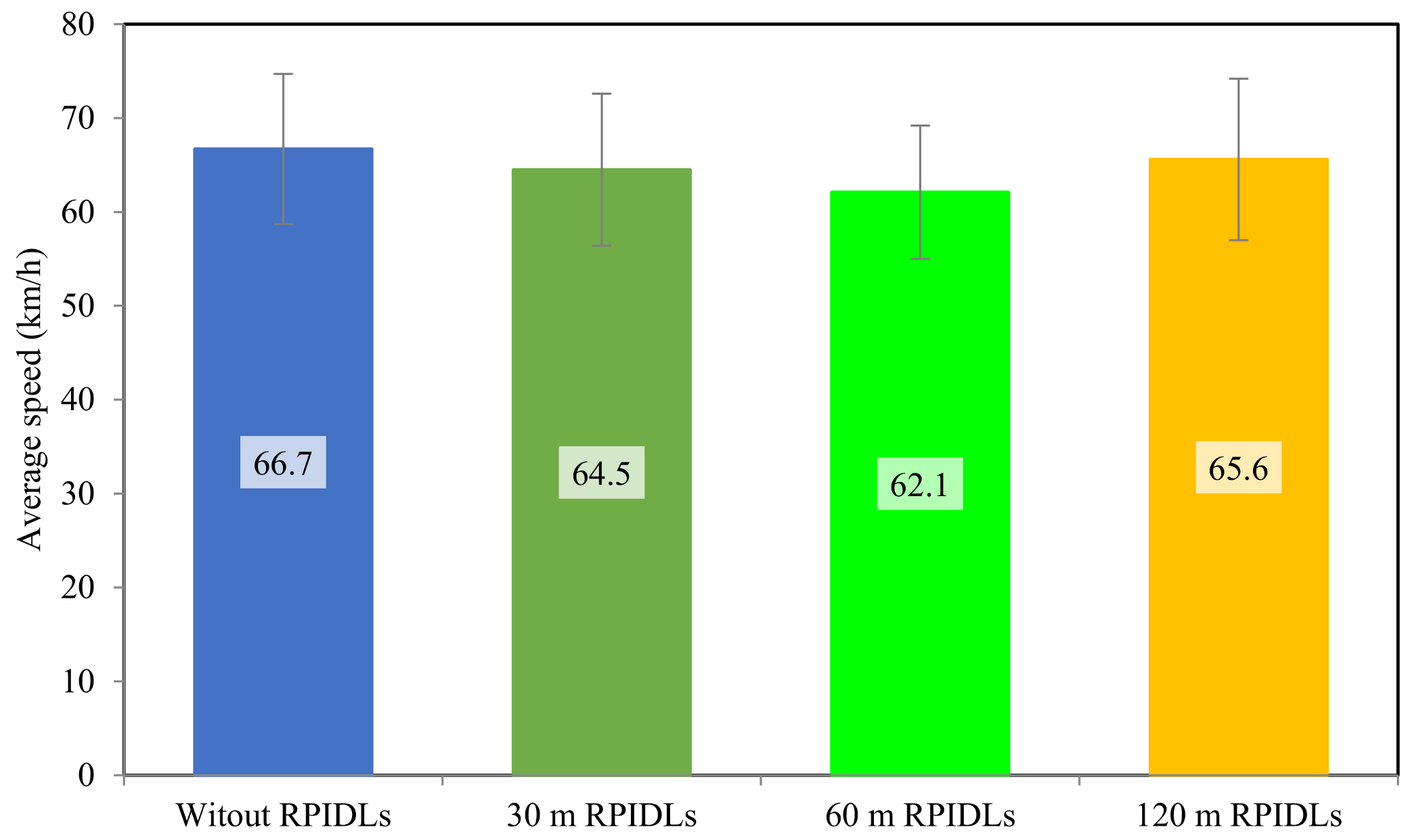
3.1.2. Effect on Average Vehicle Speed
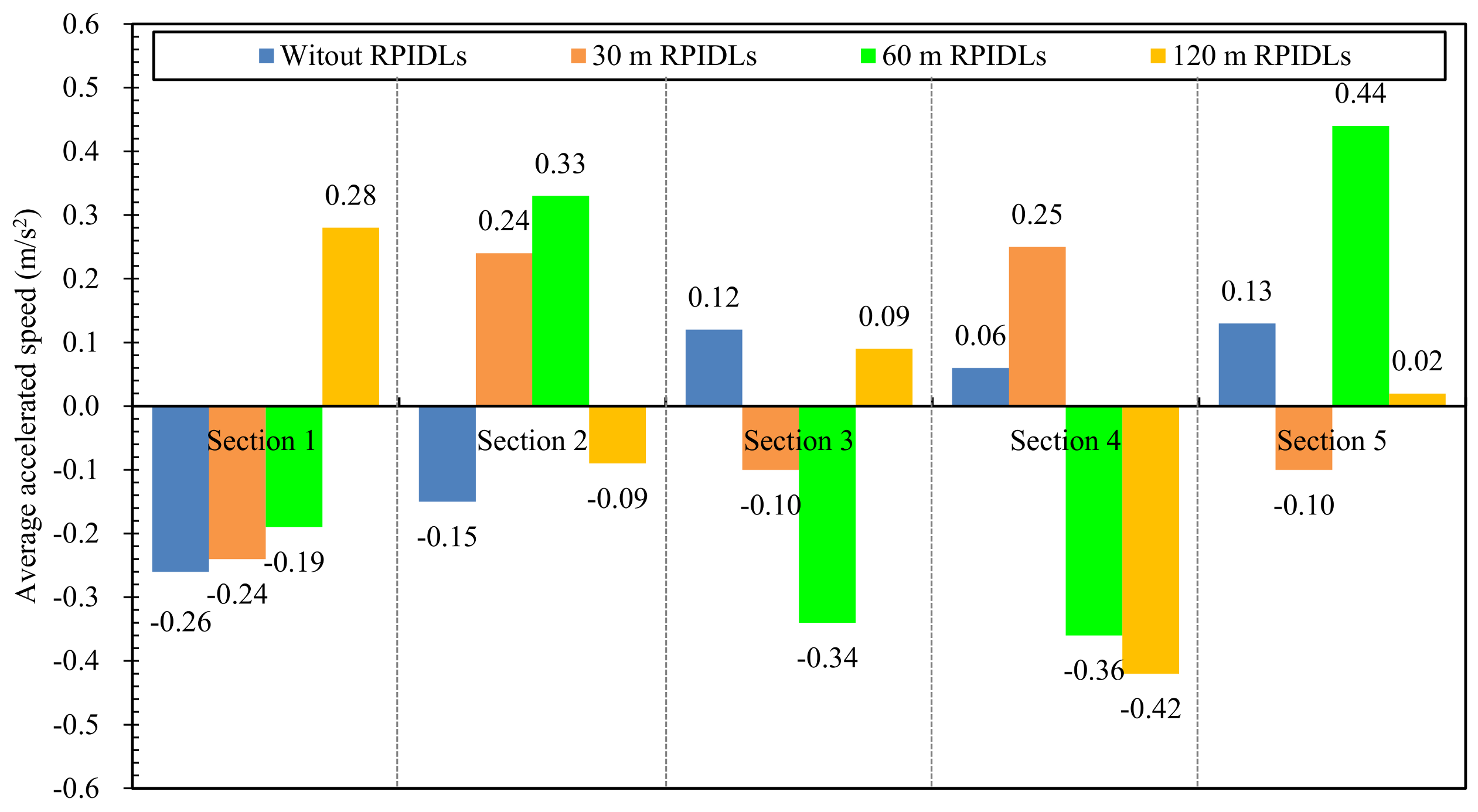
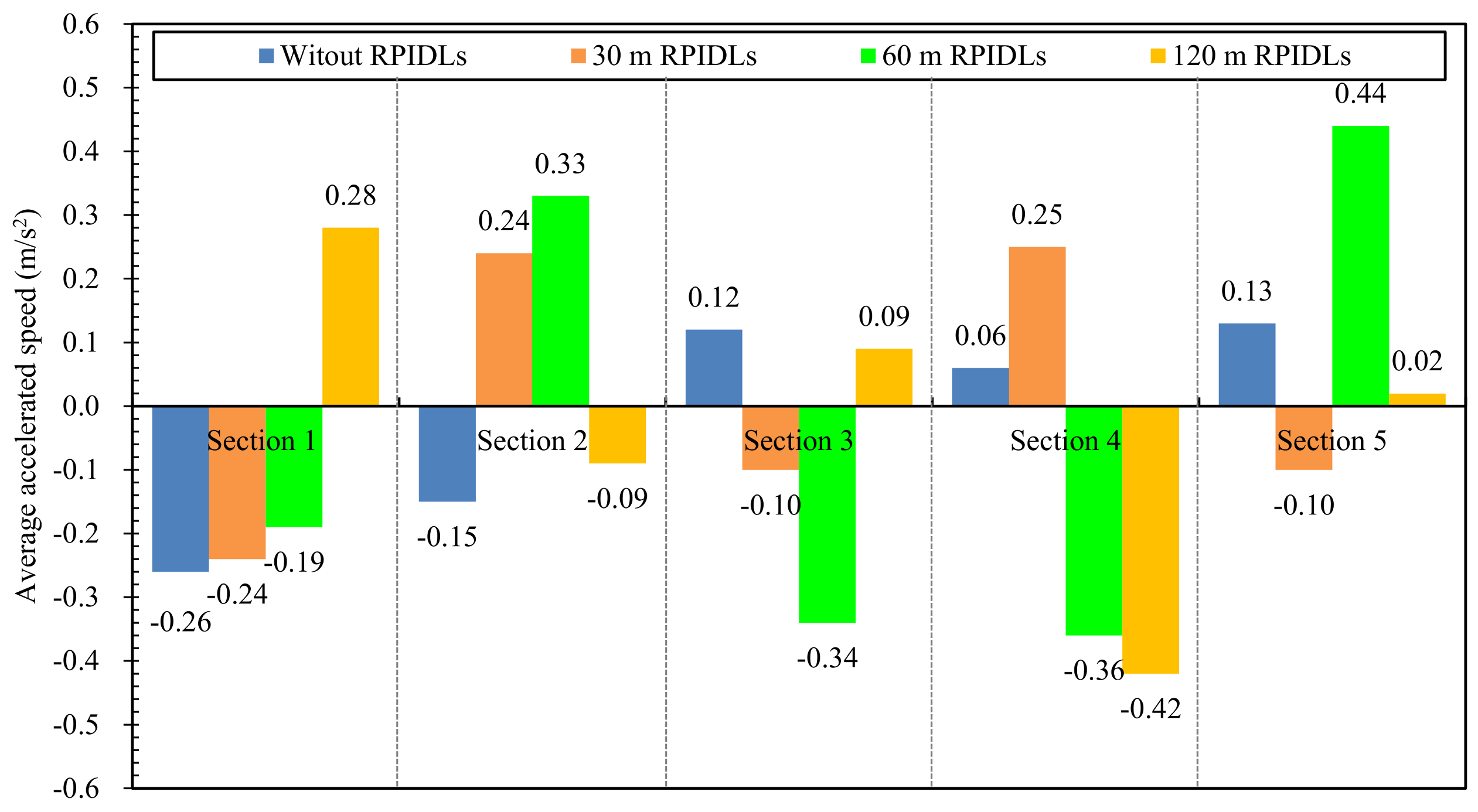
3.1.3. Effect on Average Vehicle Acceleration
3.2. Effects of VIDD on Vehicle Speeds in Middle of Long Downhill Tunnel
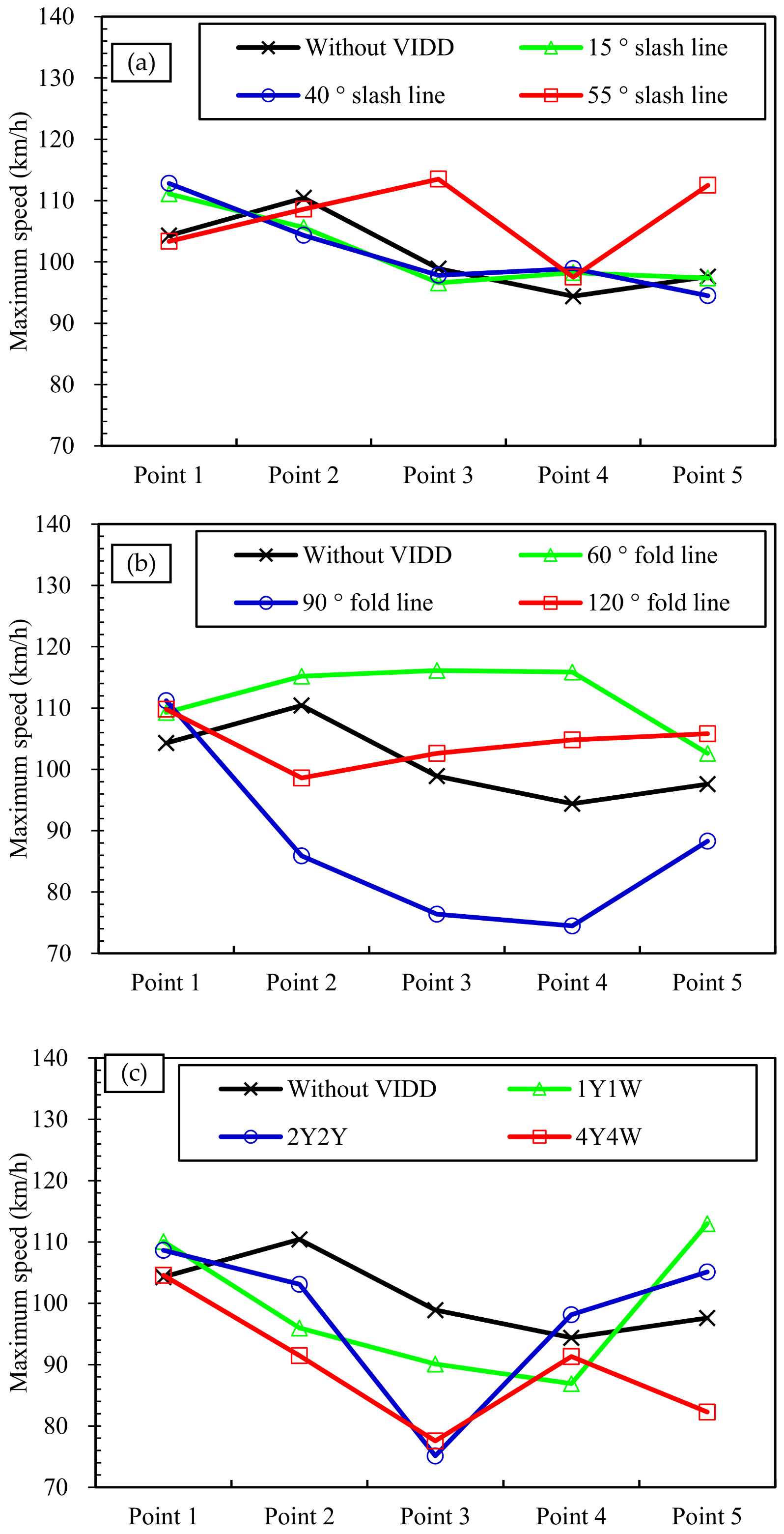
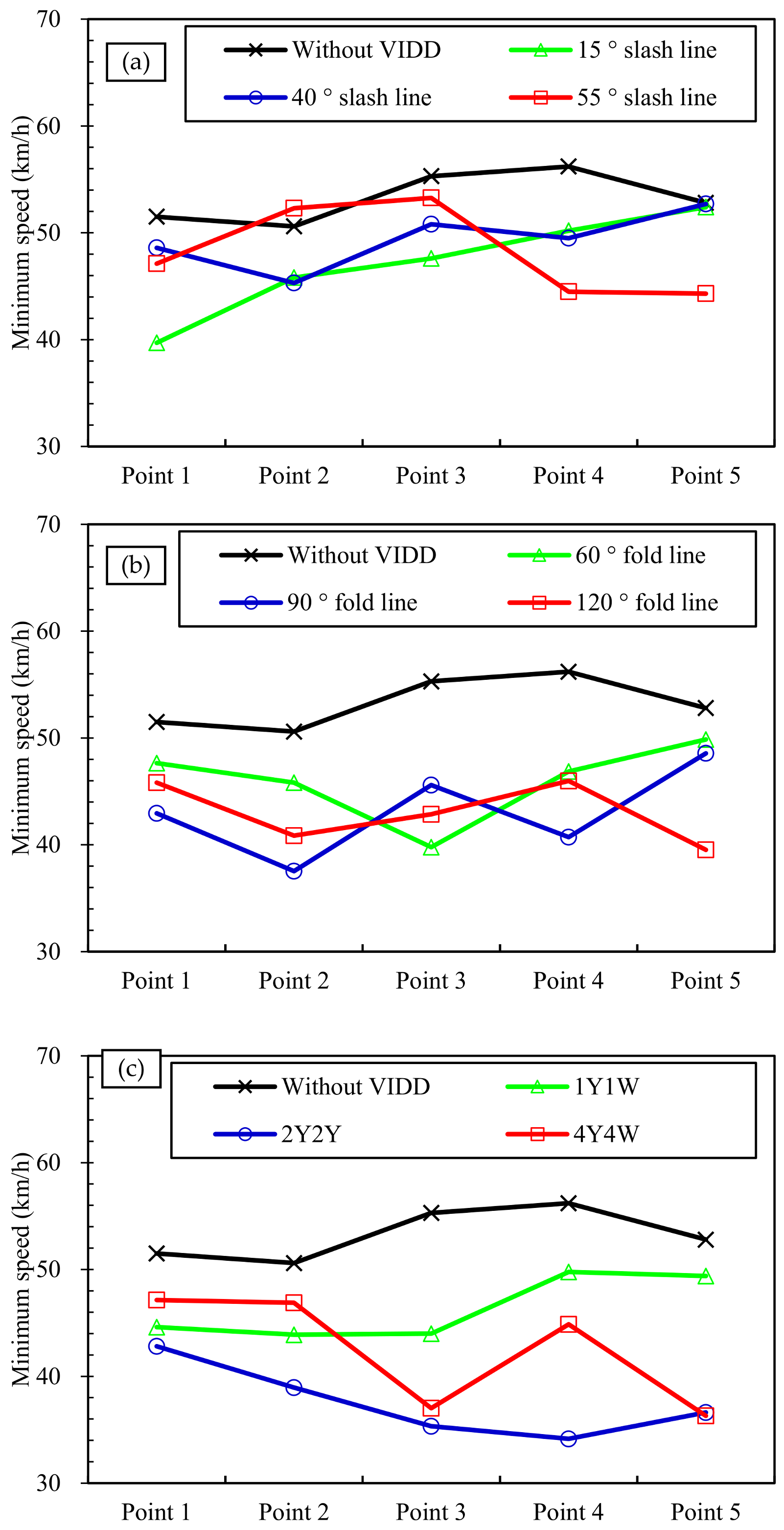
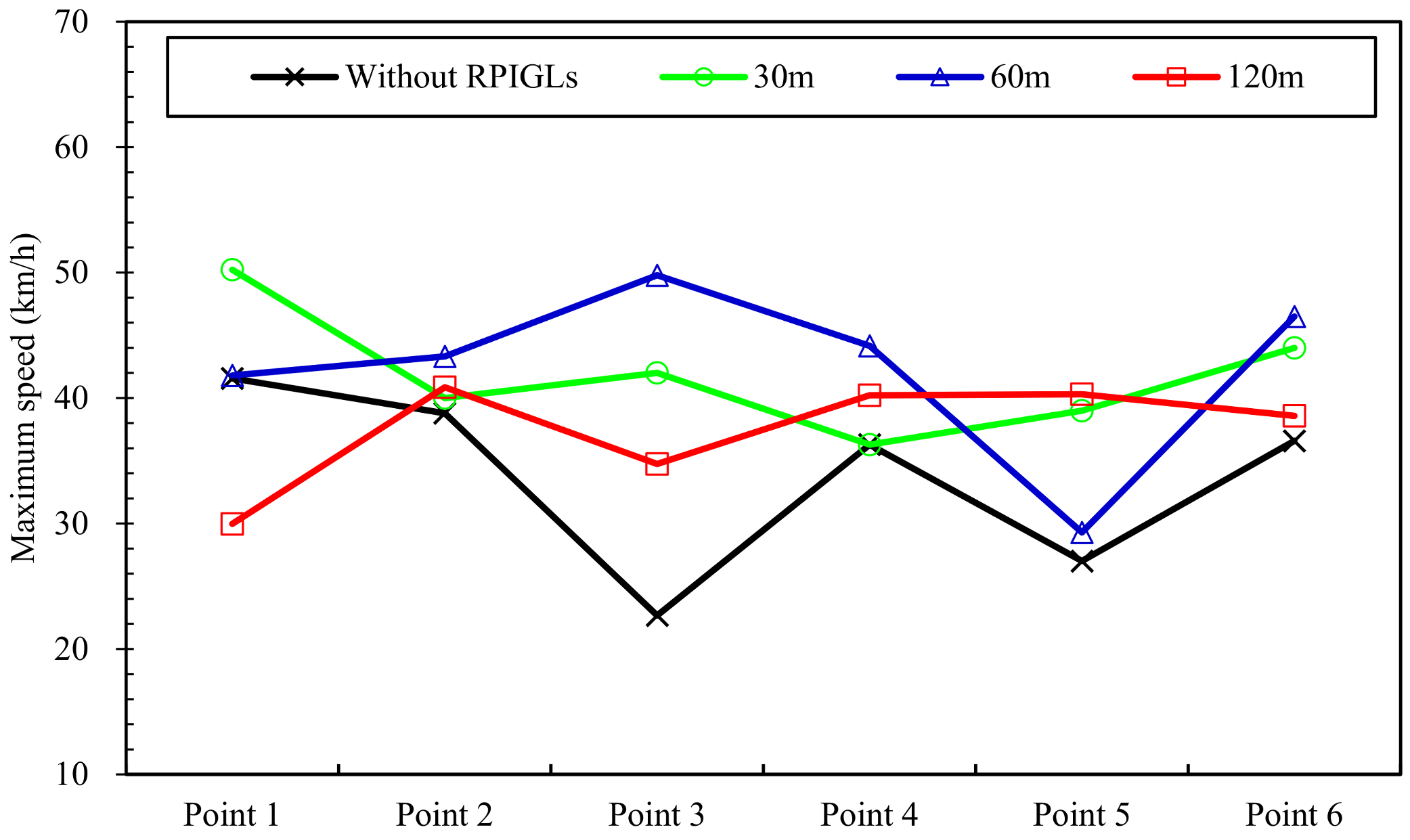
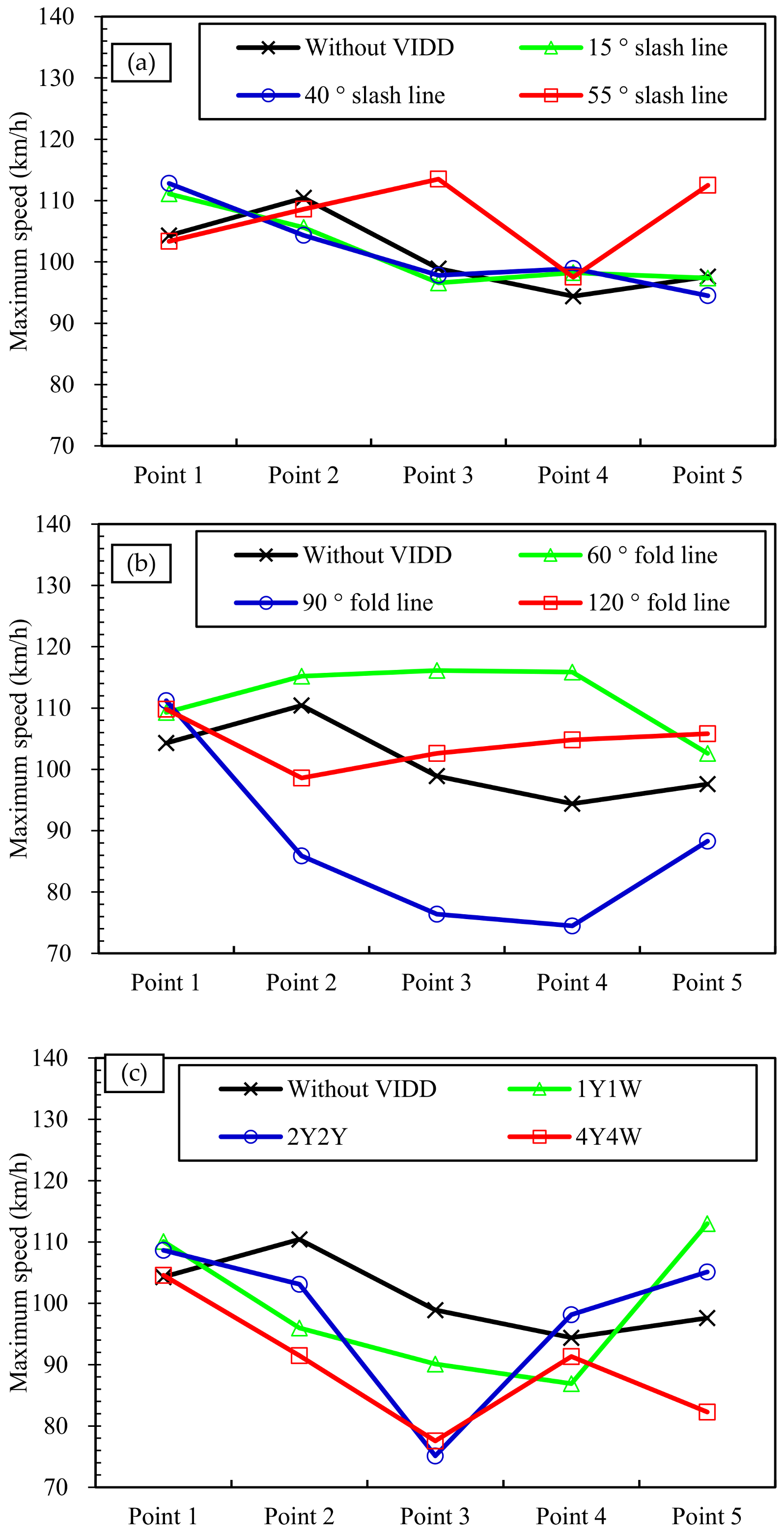
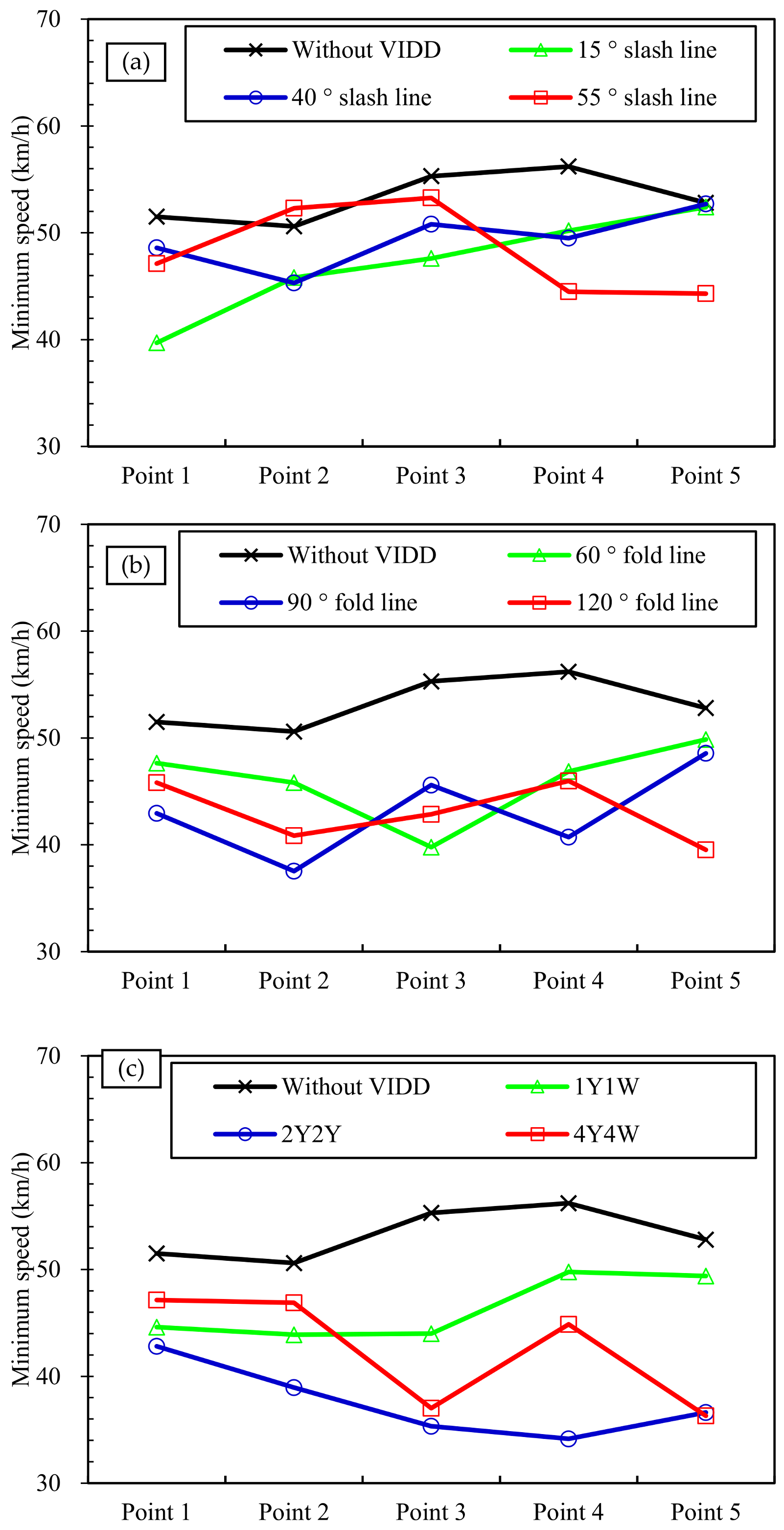
3.2.1. Effect on Vehicle Speeds at Different Observation Points
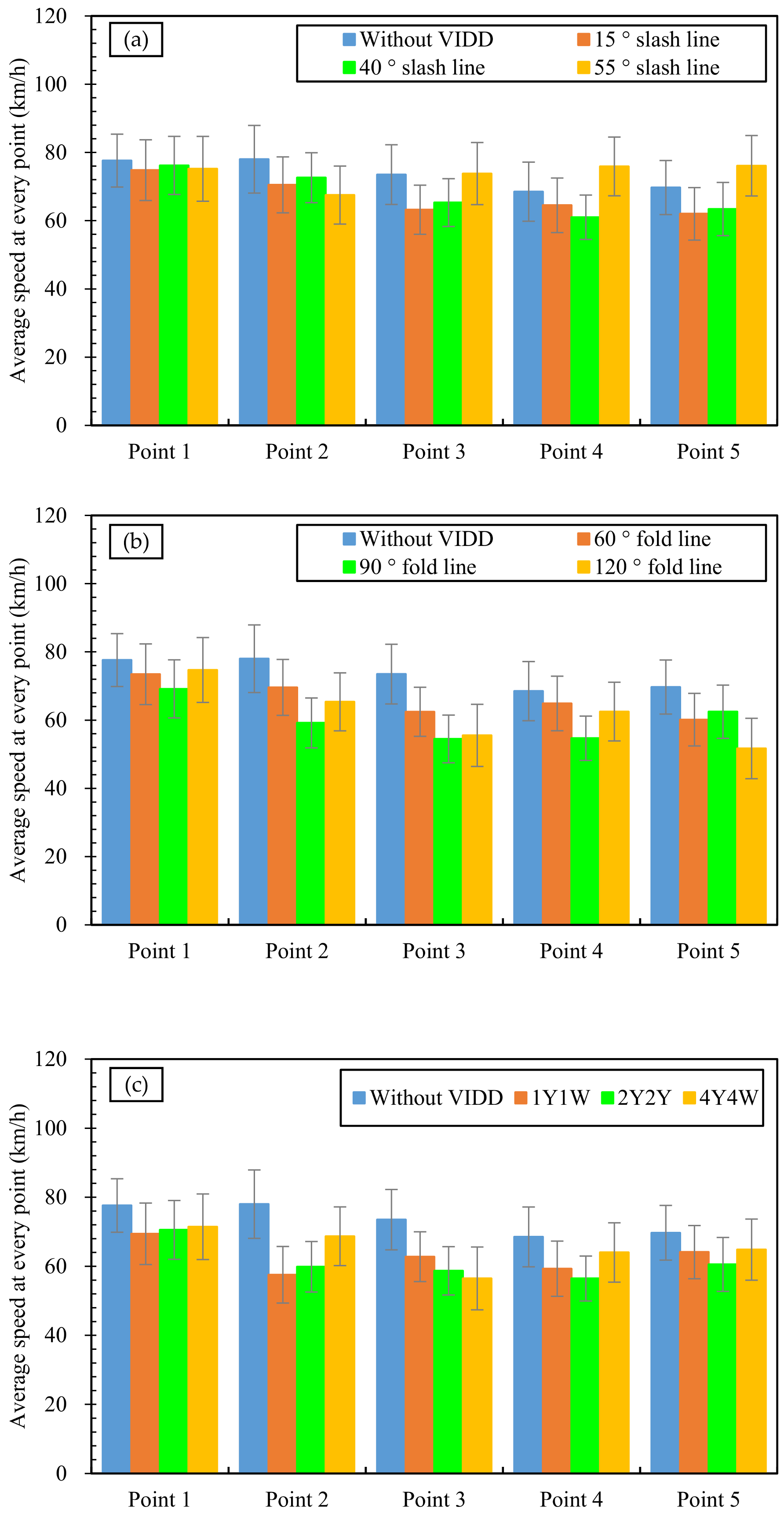
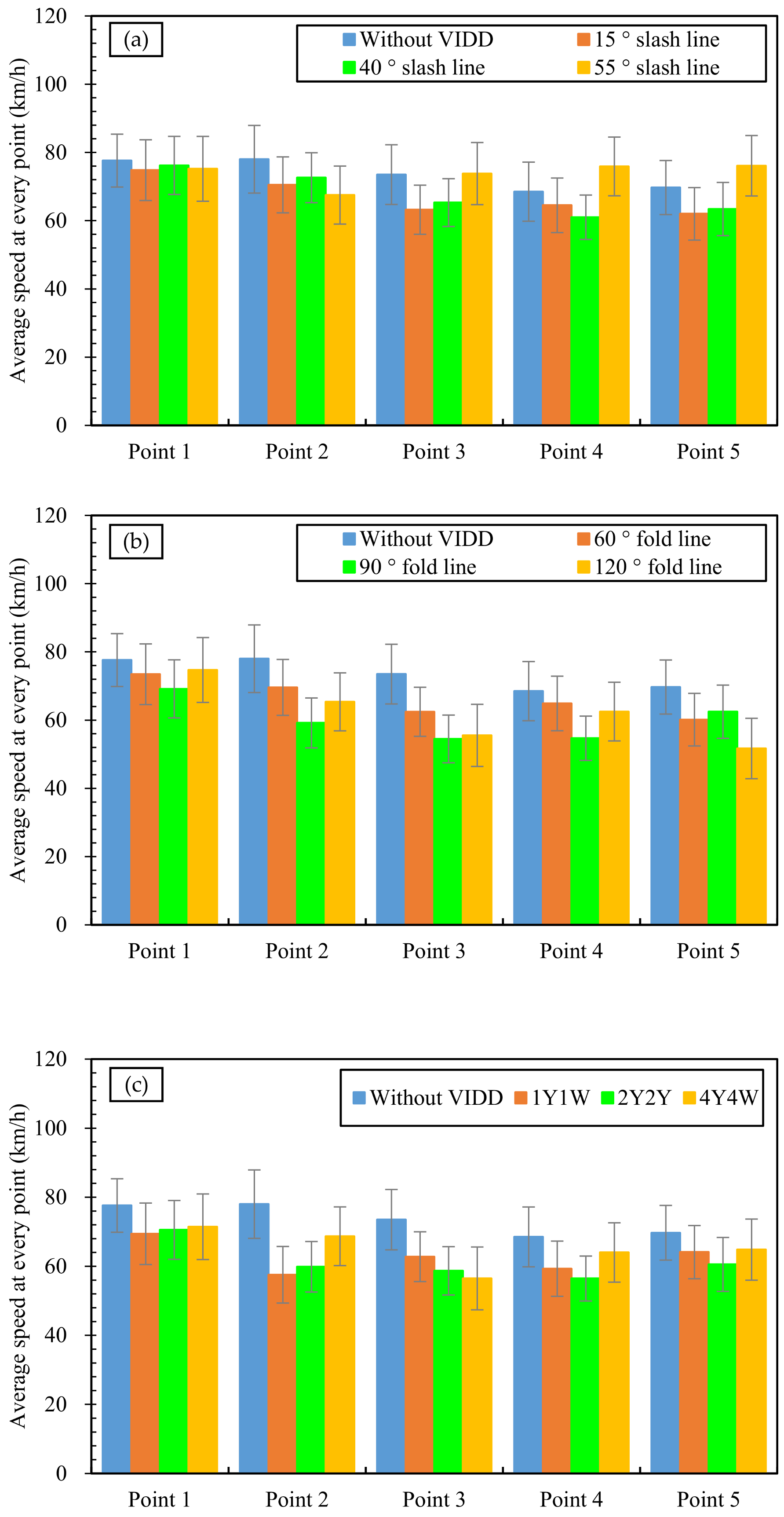
3.2.2. Effect on Average Vehicle Speed
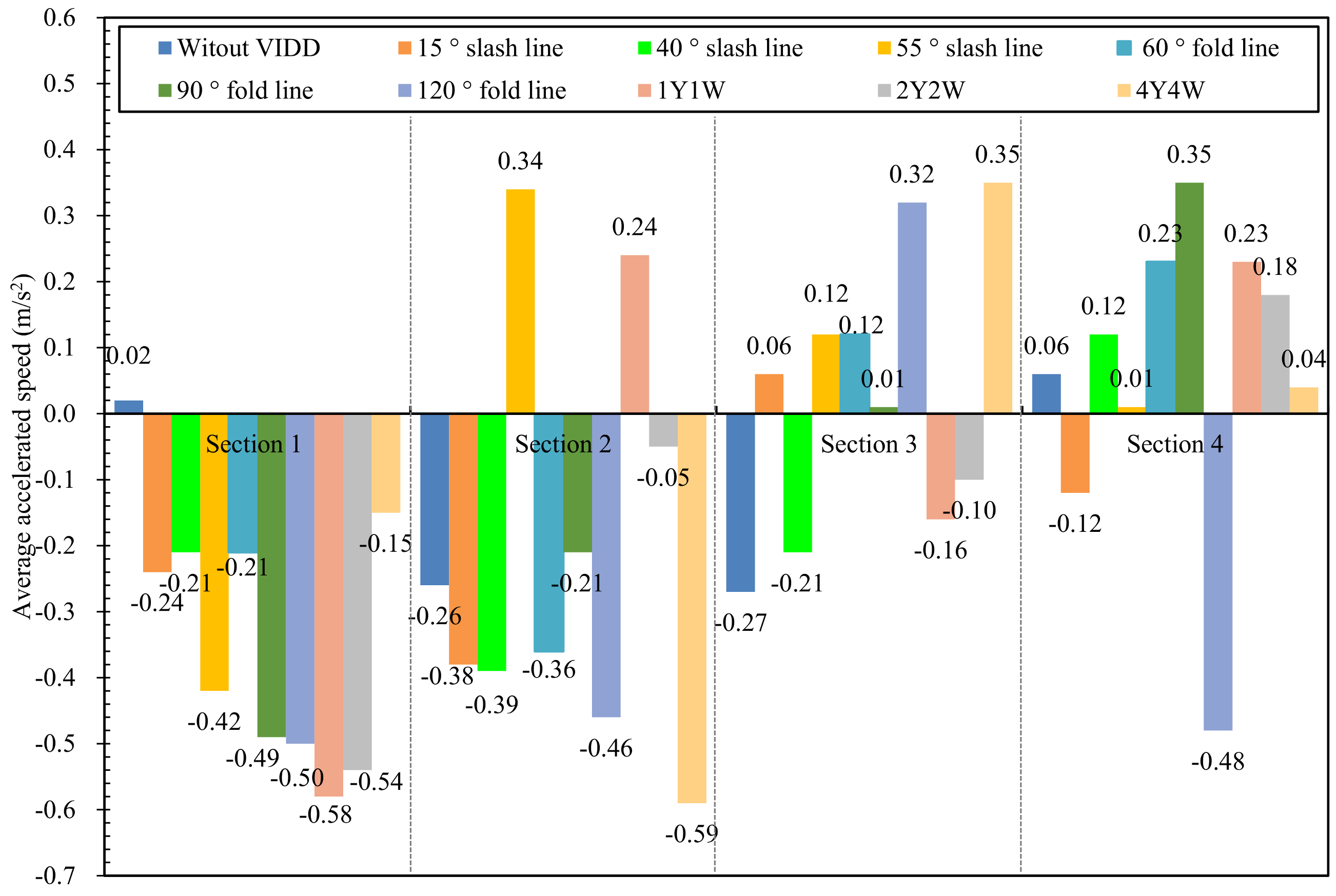
3.2.3. Effect on Average Vehicle Acceleration
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Helai, H.; Qizhang, L.; Yunying, P.; Jie, W.; Xiang, L.; Chi, Z. Risk evaluation for hazardous chemicals transportation at mountainous freeway with tunnels groups. J. Cent. South Univ. 2018, 49, 2107–2117. [Google Scholar]
- Wan, H.; Du, Z.; Yan, Q. The speed control effect of highway tunnel sidewall markings based on color and temporal frequency. J. Adv. Transp. 2016, 50, 1352–1365. [Google Scholar] [CrossRef]
- Schroter, H.G. Research on daytime lighting of tunnel entrances. Lighting Res. Technol. 1977, 9, 194–208. [Google Scholar] [CrossRef]
- Amundsen, F.; Ranes, G. Studies on traffic accidents in Norwegian road tunnels. Tunn. Undergr. Space Technol. 2000, 15, 3–11. [Google Scholar] [CrossRef]
- Du, Z.; Huang, F.; Ran, B.; Pan, X. Safety Evaluation of Illuminance Transition at Highway Tunnel Portals on Basis of Visual Load. Transp. Res. Rec. J. Transp. Res. Board 2014, 2458, 1–7. [Google Scholar] [CrossRef]
- Hirakawa, S.; Karasawa, Y.; Funaki, T. Visibility Evaluation of Expressway-Tunnel Lighting in Consideration of Vehicle Headlights. Electr. Eng. Jpn. 2015, 193, 1–9. [Google Scholar] [CrossRef]
- Yong-Zhao, Q.U.; Bei-Ping, X.U.; Liang, J. Traffic Characteristics of The Driver Heart Rate in Han Highway Tunnels. Traffic Transp. 2011, 1, 158–160. [Google Scholar]
- Caliendo, C.; De Guglielmo, M.L. Accident Rates in Road Tunnels and Social Cost Evaluation. Procedia Soc. Behav. Sci. 2012, 53, 166–177. [Google Scholar] [CrossRef] [Green Version]
- Bassan, S. Overview of traffic safety aspects and design in road tunnels. Iatss Res. 2016, 40, 35–46. [Google Scholar] [CrossRef] [Green Version]
- Cornelia, N. Comparative Analysis of Safety in Tunnels. In Proceedings of the Young Researchers Seminar, Brno, Czech Republic, 28–30 May 2007. [Google Scholar]
- Kaabi, A.A.; Dissanayake, D.; Bird, R. Response time of highway traffic accidents in Abu Dhabi: Investigation with hazard-based duration models. Transp. Res. Rec. 2012, 2278, 95–103. [Google Scholar] [CrossRef]
- Walu, K.J.; Olszewski, Z. Analysis Of Tire-road Contact Under Winter Conditions. Lect. Notes Eng. Comput. Sci. 2011, 2192, 2381–2384. [Google Scholar]
- Polasik, J.; Walu, K.J. Comparative Analysis of the Roughness of Asphalt and Concrete Surface; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar]
- Aarts, L.T.; Van Schagen, I. Driving speed and the risk of road crashes: A review. Accid. Anal. Prev. 2006, 38, 215–224. [Google Scholar] [CrossRef] [PubMed]
- Gargoum, S.A.; El-Basyouny, K. Exploring the association between speed and safety: A path analysis approach. Accid Anal Prev 2016, 93, 32–40. [Google Scholar] [CrossRef] [PubMed]
- Bowie, N.; Walz, M. Data analysis of the speed-related crash issue. Auto Traffic Saf. 1994, 1, 31–38. [Google Scholar]
- Shao, M.; Xie, C.; Sun, L.; Wan, X.; Chen, Z. Left-Side On-Ramp Metering for Improving Safety and Efficiency in Underground Expressway Systems. Sustainability 2019, 11, 3247. [Google Scholar] [CrossRef] [Green Version]
- Patten, C.; Mårdh, S. Interior tunnel design and traffic safety aspects. In Proceedings of the 16th international conference, Beijing, China, 15–17 May 2013. [Google Scholar]
- Huang, Y.Y.; Menozzi, M. Evaluation of Risky Driving Performance in Lighting Transition Zones Near Tunnel Portals. In Proceedings of the Institute of Industrial Engineers Asian Conference 2013; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- He, S.; Bo, L.; Pan, G.; Feng, W.; Cui, L. Influence of dynamic highway tunnel lighting environment on driving safety based on eye movement parameters of the driver. Tunn. Undergr. Space Technol. 2017, 67, 52–60. [Google Scholar] [CrossRef]
- Ran, L. Study on Entrance Lighting and Traffic Safety of Expressway Tunnel. In Proceedings of the International Conference on Machinery, 2017 2nd International Conference on Machinery, Electronics and Control Simulation (MECS 2017), Taiyuan, China, 24–25 June 2017. [Google Scholar]
- Kircher, K.; Lundkvist, S.O. The influence of lighting, wall colour and inattention on traffic safety in tunnels: A simulator study. Tillämpad Psykologi. 2011. Available online: http://citeseerx.ist.psu.edu/viewdoc/download;jsessionid=7BDF5482844F85A783D9644E5DDD8AE6?doi=10.1.1.452.6630&rep=rep1&type=pdf (accessed on 1 July 2021).
- Kim, J.; Lee, S.; Hong, J.; Lim, J.; Song, B.K.; Kim, W. A Study on Influences of Long Tunnel Landscape Images on Driver Response through Virtual Driving Experiment. Proc. East. Asia Soc. Transp. Stud. 2012, 2011, 153–160. [Google Scholar]
- Shi, X.H.; Zhi-Gang, D.U.; Zheng, Z.J.; Chao-Zhong, W.U.; Transportation, S.O. Optimization of Optical Illusion Deceleration Markings in Middle of Highway Tunnel. J. Highw. Transp. Res. Dev. 2016, 33, 89–96. [Google Scholar]
- Wan, H.; Du, Z.; Ran, B.; Wang, M. Speed Control Method for Highway Tunnel Safety Based on Visual Illusion. Transp. Res. Rec. J. Transp. Res. Board 2015, 2485, 1–7. [Google Scholar] [CrossRef]
- Zheng, Z.; Du, Z.; Yan, Q.; Xiang, Q.; Chen, G. The impact of rhythm-based visual reference system in long highway tunnels. Saf. Sci. 2017, 95, 75–82. [Google Scholar] [CrossRef]
- Jia, X.; Li, M.; Jin, L. Study on Effects of Safety Facilities on driver’s Speed Perception and Concentration in Expressway Tunnel. J. Residuals Sci. Technol. 2016, 13, 139.1–139.5. [Google Scholar]
- Nd, A.; Sz, B.; Hong, W.B.; Nj, C. Effects of reverse linear perspective of transverse line markings on car-following headway: A naturalistic driving study. Saf. Sci. 2019, 119, 50–57. [Google Scholar]
- Elvik, R. Speed and Road Safety—New Models. Transp. Res. Rec. J. Transp. Res. Board 2014, 1908, 59–69. [Google Scholar] [CrossRef]
- Elvik, R. A re-parameterisation of the Power Model of the relationship between the speed of traffic and the number of accidents and accident victims. Accid. Anal. Prev. 2013, 50, 854–860. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Feldman, M.; Manzi, J.G.; Mitman, M.F. Empirical Bayesian Evaluation of Safety Effects of High-Visibility School (Yellow) Crosswalks in San Francisco, California. Transp. Res. Rec. 2018, 2198, 8–14. [Google Scholar] [CrossRef]
- Derry, J.D.; Afukaar, F.K.; Donkor, P.; Mock, C. Study of Vehicle Speeds on a Major Highway in Ghana: Implication for monitoring and control. Traffic Inj. Prev. 2007, 8, 142–146. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RPIDL Length | No RPIDLs | 30 m | 60 m | 120 m |
|---|---|---|---|---|
| Speed difference | 66.0 km/h | 59.2 km/h | 45.8 km/h | 79.1 km/h |
| VIDD Type | None | Slash Lines | Fold Lines | Alternating Yellow and White Lines | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 15° | 40° | 55° | 60° | 90° | 120° | 1Y1W | 2Y2W | 4Y4W | ||
| Speed difference (km/h) | 47.8 | 54.6 | 52.3 | 58.8 | 65.8 | 44.2 | 61.3 | 52.9 | 60.5 | 47.0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, F.; Gu, D.; Li, Y.; Liu, W.; Wang, G.; Ding, N. Effects of Visual Active Deceleration Devices on Controlling Vehicle Speeds in a Long Downhill Tunnel of an Expressway. Appl. Sci. 2021, 11, 6753. https://doi.org/10.3390/app11156753
Wang F, Gu D, Li Y, Liu W, Wang G, Ding N. Effects of Visual Active Deceleration Devices on Controlling Vehicle Speeds in a Long Downhill Tunnel of an Expressway. Applied Sciences. 2021; 11(15):6753. https://doi.org/10.3390/app11156753
Chicago/Turabian StyleWang, Fu, Dengjun Gu, Yuanyuan Li, Wei Liu, Guoyun Wang, and Naikan Ding. 2021. "Effects of Visual Active Deceleration Devices on Controlling Vehicle Speeds in a Long Downhill Tunnel of an Expressway" Applied Sciences 11, no. 15: 6753. https://doi.org/10.3390/app11156753
APA StyleWang, F., Gu, D., Li, Y., Liu, W., Wang, G., & Ding, N. (2021). Effects of Visual Active Deceleration Devices on Controlling Vehicle Speeds in a Long Downhill Tunnel of an Expressway. Applied Sciences, 11(15), 6753. https://doi.org/10.3390/app11156753