1. Introduction
Cave surveys are a crucial point in cavers’ activity as they allow mapping caves for their exploration [
1]. It is helpful as a guide for further exploitation or as a basis for scientific activities carried out in those caves. In particular, 3D digital models of caves are suitable tools for both scientific purposes. They can be used for geological or geomorphological observations [
2], for the integration of 3D underground caves cadastral databases [
3], and visualization and navigation, especially related to complex access caves, through virtual and augmented reality techniques [
4]. In geomatics, several well-established methods are available for the three-dimensional survey of environments. Indoor environments represent a rather critical case, where the GNSS positioning technique fails [
5]. Therefore the 3D survey should be carried out by well-established topographical instruments, capable of measuring angles and distances such as the total station. Still, the space complexity limits the use of some instruments for 3D surveying or requires the operator’s great experience. Additionally, the three-dimensional representation of the caves is even more complex. The task is complicated by extreme environmental conditions, such as low/variable illumination, humidity, and limited accessibility [
6].
Traditionally, the mapping procedures in underground cave environments were carried out by tracing a three-dimensional polyline by using clinometers and compass to store the different angles featuring the survey; each segment implied the marking of its vertices on cave walls to serve as a reference. The cave outline was then manually plotted by the caver with a remarkable level of subjectivity (
Figure 1) [
1,
7], including systematic and random errors.
Recently, the use of clinometers and compass was substituted by the spread of handheld topographic instruments such as portable laser range finders equipped with digital clinometers and compass [
1,
7]. The measurements acquired with the laser range finder are stored in the device or, currently, in a phone app (e.g., TopoDroid) linked to the range finder where the caver can visualize the entire survey [
8]. Moreover, in every station point, the survey procedure implies a series of circular measures to trace a transverse section of the cave obtaining a discrete three-dimensional representation. The app allows the caver to manually draw the cave outline adding details to the survey (
Figure 1). The obtained final result is a subjective representation of the cave done by the caver on a network of measured points. The resolution and accuracy of the three-dimensional model are often highly heterogeneous and rely on the caver’s ability that connects the sequence of dots and creates the representation of the surveyed area.
Thanks to technological advances over the last decade, several 3D surveying techniques for generating full 3D and multi-resolution models of underground cavities are now available. Besides topographical instruments, such as Total Stations (TS), it is possible to get 3D information about the environment in the form of point clouds quickly and easily and with high levels of details thanks to a wide range of passive and active sensors [
9]. These sensors are now commonly used in different application fields (e.g., cultural heritage, monitoring, etc.) for the reconstruction of scenes or 3D objects and there are several studies aimed at comparing the use of different techniques to highlight their advantages and criticality and to define the best practice to follow [
10,
11,
12,
13,
14,
15]. To achieve more accurate and complete surveying results, it is crucial to be aware of the properties that certain technique needs to respond and of the requirements of the desired results [
16]. Firstly, the selection of the most appropriate survey approach should consider not only the precision and the reliability of the resulting products, but also the size and manageability of the final datasets. Then, from the operational point of view, it is fundamental to evaluate the portability of instruments, especially in underground sites with limited accessibility. Other important elements are the required acquisition time and the autonomy of the power system of selected survey solutions. Finally, the conditions of the survey environment greatly influence the choice of the most appropriate technique, especially in the case of underground caves, where the difficulty of access, humidity, temperature, and lighting conditions strongly reduced the number of effective solutions.
Both active and passive remote sensing techniques are, nowadays, widely exploited in underground environments surveys for 3D modeling purposes. Active remote sensing-based instruments include all the scanning devices, such as Terrestrial Laser Scanners (TLS), emitting laser pulses [
17]. A surface or object reflects each pulse, and the instrument is capable of computing the distance and position, in polar coordinates, of the point. The intensity of the echo is registered, too. According to its performance level and its settings, the instrument can repeat this sequence from 10,000 to 500,000 times per second.
Moreover, to acquire a complete survey of the surroundings, laser beams are projected in several directions using rotating and/or oscillating mirrors. The color information can also be recorded thanks to the integration of the system with a digital camera. For each scan station, raw output data is generated in the form of a point cloud. The data registration is carried out by positioning reference targets (natural or artificial), which were previously surveyed by a topographical survey, to georeference the resulting point cloud in a specific reference system [
18]. TLS is now a consolidated approach to obtain a 3D measurement. Despite its encumbrance and weight, some tentative approaches to use it in cave surveys were attempted. They were especially tried in caves open to tourists and thus equipped with stairs and footbridges, easing the transport of the instrumentation, as evidenced by several research works [
19,
20,
21,
22,
23,
24,
25] or in sites relevant for scientific purposes such as the Naica cave [
26]. TLS allows capturing highly accurate data even at long distances but, in indoor environments and complex areas characterized by limited lines of sight and many shadow areas, it often cannot be an efficient method given the need for a high number of station points. Thanks to the high level of detail obtained with this technique, TLS has been used in many studies to detect limited portions of caves, to conduct morphological and structural analysis [
27,
28,
29,
30]. Only in some works, as mentioned by [
31], TLS were used to make surveys of entire caves, with extensions greater than a few hundred meters. Although these surveys allowed to obtain detailed models, they demonstrated that, due to the huge amount of final data, the point clouds must be divided into parts to be analyzed or sub-sampled, with a consequent loss of resolution.
To overcome these applicability issues, in recent years, a new generation of range-based profilers was pushed on the market. This new generation of instruments is represented by integrated and handheld solutions called Indoor Mobile Mapping Systems (IMMS) [
32]. These systems implement multiple sensors, such as profilers, Inertial Measurement Units (IMU), Distance Measuring Instruments (DMI), and, in some cases, camera sensors, in a unique platform. The portability and flexibility of these solutions make them particularly suitable for indoor mapping applications [
33,
34]. These instruments are generally based on Simultaneous Localization and Mapping (SLAM) technology, including specific algorithms to solve the problem of localization, which allow to, simultaneously, estimate the instrument position and generate a 3D digital model of the environment [
35,
36]. Consequently, SLAM technology makes IMMS a competitive possibility in terms of time consumption in data acquisition and data processing. Several IMMS solutions are now available on the market. Among the different types, many of them are integrated on vehicles, trolleys, backpacks, or handheld platforms [
33,
37], and several researchers analyzed their performances [
37,
38,
39]. The maneuverability of these tools makes them particularly suitable for indoor applications and narrow spaces [
40,
41], even in environments with limited access, which may require a certain speed in the acquisition phase, as could be the case of caves or mines [
42,
43].
Among passive solutions 3D information can be extracted, thanks to different approaches involving classical photogrammetric technique [
44] or Structure from Motion (SfM) algorithms [
45,
46] from a sequence of images. The SfM approach is based on the capture of multiple shots that portrays the surveyed object or area. The algorithms developed in the computer vision field and widespread in RPAS (Remotely Piloted Aircraft Systems) applications [
47] exploit the photogrammetry principles and allow the 3D reconstruction of the surveyed target [
48]. The algorithm’s capability allows reconstructing the surveyed object even from pictures taken for other aims (i.e., reconnaissance photos) sufficiently overlapping (70–80% of overlap), allowing to exploit archived dataset and obtain unprecedented datasets [
49]. SfM can be considered a valid and low-cost solution for the acquisition of 3D models that can be considered when it is impossible to use other well-known systems like TLS or other topographic solutions [
50]. Furthermore, xxx by knowing the internal and external orientation of a digital image, using a dense 3D digital model, it is possible to associate the value of the distance between the center and the object to the same pixel. This procedure allows realizing a solid image, which is, therefore, the result of the integration of the RGB digital image with distance, allowing the restitution of the third dimension [
51].
The reconstruction of the photogrammetric point cloud can also be registered with reference points to be plotted in geographical coordinates. The advances in sensors miniaturization and optimization have allowed developing portable instruments that are currently at an experimental level trying to substitute the current ones. Today, image sensors are integrated into commonly used devices, such as action cameras and smartphones, giving, even to non-expert operators, the ability to exploit collected data for the generation of 3D models [
6]. Moreover, the increment of RPAS datasets is additionally broadening the potential application of such an approach [
52,
53]. Although these systems were initially implemented to acquire data in extensive outdoor environments, there are now many recent studies that describe their applicability in indoor spaces [
54,
55], even in dark caves [
56]; in this last case, proposed solutions are mainly employed for the survey of small portions of the natural cave [
57] and not for extensive surveys.
The main advantage of the use of passive sensors is that they do not require elaborate data acquisition planning, and data processing is also relatively easy. The resolution of the generated 3D point clouds strictly depends on: the image resolution, the camera characteristics, and the acquisition distance from the studied object, namely by the Ground Sample Distance (
GSD), which can be calculated as follows:
where
hg is the flying height above ground (or the acquisition distance from the object),
ck is the focal length of the camera and
ρ is the image’s pixel size [
58]. Even if the density of point clouds can be compared to that of the TLS, it may be affected by a certain level of noise in particular with low light conditions, light variations, and reflective or uniform surfaces.
The recent evolution of SfM applications on caves seems to be encouraging for the identification of a methodology that could be used for a massive 3D mapping of caves. To date, only a minimal number of caves are represented in the third dimension and they are often equipped with ladders and walkways, for tourism or archaeological purposes, to ease their access [
59,
60]. In this paper, we investigated the best compromise between the accuracy and feasibility of different techniques and to define a general methodology to carry out a 3D survey of natural and complex caves. The proposed methodology should be easily replicable and ensure sufficient precision, such as to be able to populate a possible 3D cadastral map of the caves or carry out virtual tours, even for difficult to access environments. In fact, this type of application requires a user-friendly methodology that refers to simple concepts and allows a high diffusion of the technique. The paper is organized as follows: we made an accurate survey of a test site, i.e., a road tunnel segment to compare the proposed techniques with the reference data and assess their accuracy. According to the test site results, we developed and proposed a methodology for the survey of natural caves based on the SfM approach. The proposed survey technique is tested in the Gazzano cave. The final discussion presents an analysis of the different 3D survey methodologies and the best solution for the 3D natural caves survey, showing the general validity of the SfM approach.
2. Material and Methods
The paper presented two different case studies; the first part of the research is focused on the definition of the quality of a 3D point cloud of an underground artificial site. We tested three different measuring systems and we explored, in particular, the quality (in terms of precision) of their results and their limitations in a segment of a tunnel to adopt this approach in an underground structure that can be easily reached even using cars and that have the typical limitations of underground sites like the lack of GNSS signal.
The second presented case study is the Gazzano cave. Gazzano is an interesting cave located in Piemonte (NW of Italy) that has been selected for the application of the methodology developed for the creation of a 3D model of caves.
2.1. Artificial Tunnel Segment
To test the capability of reconstructing an underground structure, we analyzed the survey of the tunnel test site assuming the TLS survey as the reference technique. The considered tunnel segment is 100 m long with 12.5 m diameter, where we placed and measured on walls the position of 56 reference targets. Targets were distributed in groups of 4, 2 for each side, every 10 m along the tunnel. Within the subgroup, the target-target distance ranged from 1.5 to 3 m. Targets position was rigorously surveyed from 6 setup locations using Total Station (TOPCON GPT-7001L) to compute their 3D coordinates. The survey was registered using four benchmarks located in the tunnel. The network coordinates were computed with a precision of ±0.02 m.
2.2. Gazzano Cave
The Gazzano cave (125 Pi/CN—Regional cave cadastre) is located in the Maritime Alps in the municipality of Garessio, Northwestern Italy (44°11′52.18″ N, 8°0′40.74″ E) at 574 m above sea level elevation (
Figure 2). The cave was accidentally discovered during the excavation of a quarry and explored in 1898. In the past, several peculiar features were looted and, nowadays, the marks of these actions are still visible. The Gazzano cave is an important natural site for the preservation of biological diversity because it is a bat (
Rhinolopus spp.) hibernation site and a natural refuge for European cave salamanders (
Speleomantes spp.).
The cave, excavated in dolomitic limestone, is characterized by a unique corridor approximately 105 m long that ends in a chamber 37 m high with a waterfall from its top (
Figure 2a); the water forms a small lake in the chamber then streams through the whole cave length until the exit (
Figure 2b). The cave is accessible after a short walk. Initially, approximately in the first third of its length, the cave is characterized by a reduced height—minimum ~1 m hampering the accessibility and operation with bulky instrumentation; then the height increases allowing one to walk almost comfortably until the terminal chamber.
2.3. D Survey of the Artificial Tunnel Segment
The survey of the tunnel was done considering three approaches based on the use of active or passive instruments with different costs and characteristics. The first considered system is a terrestrial laser scanner (TLS). It represents the most accurate and expensive solution for the acquisition of a 3D model. Despite these systems allow to obtain products with high resolutions, their size and weight make them difficult to transport in many caves, where the accessibility and movement within them are limited. The second category of the considered instrument is portable LiDAR (PLS). PLS are characterized by an active sensor that works like the TLS, but the system has been designed to be more portable and easier to use. The limited cost and dimension make this category of instruments more adapted to the acquisition of environments characterized by problems of accessibility. The third considered solution is based on the use of a commercial photo camera and Structure from Motion (SfM) for the generation of a 3D point cloud. This is the cheapest solution that adopts a passive sensor.
Table 1 shows the instruments exploited for this research work.
We decide to use an artificial tunnel to test the considered methodologies because in several natural caves the transport and use of big instruments with heavy batteries can be very complex or even impossible. For this reason, we identified a segment of a tunnel that has favorable characteristics as the section that allows the use of cars for carrying instruments and its regular geometry that guarantees an easy comparison between results obtained by different instruments. The artificial test site also allows the temporary installation of a series of targets on the walls of the tunnel that has been fundamental for the alignment and comparison of different 3D models.
2.4. Development of a Methodology for the Acquisition of a 3D Model of a Natural Cave
The comparison of the acquired 3D models, as reported in
Section 3.1, shows that the solution based on the use of a photo camera and SfM can be adopted for the acquisition of a sufficiently accurate 3D model, making it suitable for the reconstruction of the geometry of the studied area. Furthermore, this solution limits the use of expensive and heavy instruments which can hardly be carried in tight spaces. For this reason, SfM can be considered a good solution for the acquisition of the 3D model of natural caves, where the use of more complex topographic instruments can be complicated (in several cases nearly impossible). Starting from the experience using the SfM approach in different environments (e.g., [
6,
61,
62,
63]), we defined and tested a methodology dedicated to the survey of natural caves for their 3D modeling at different scales.
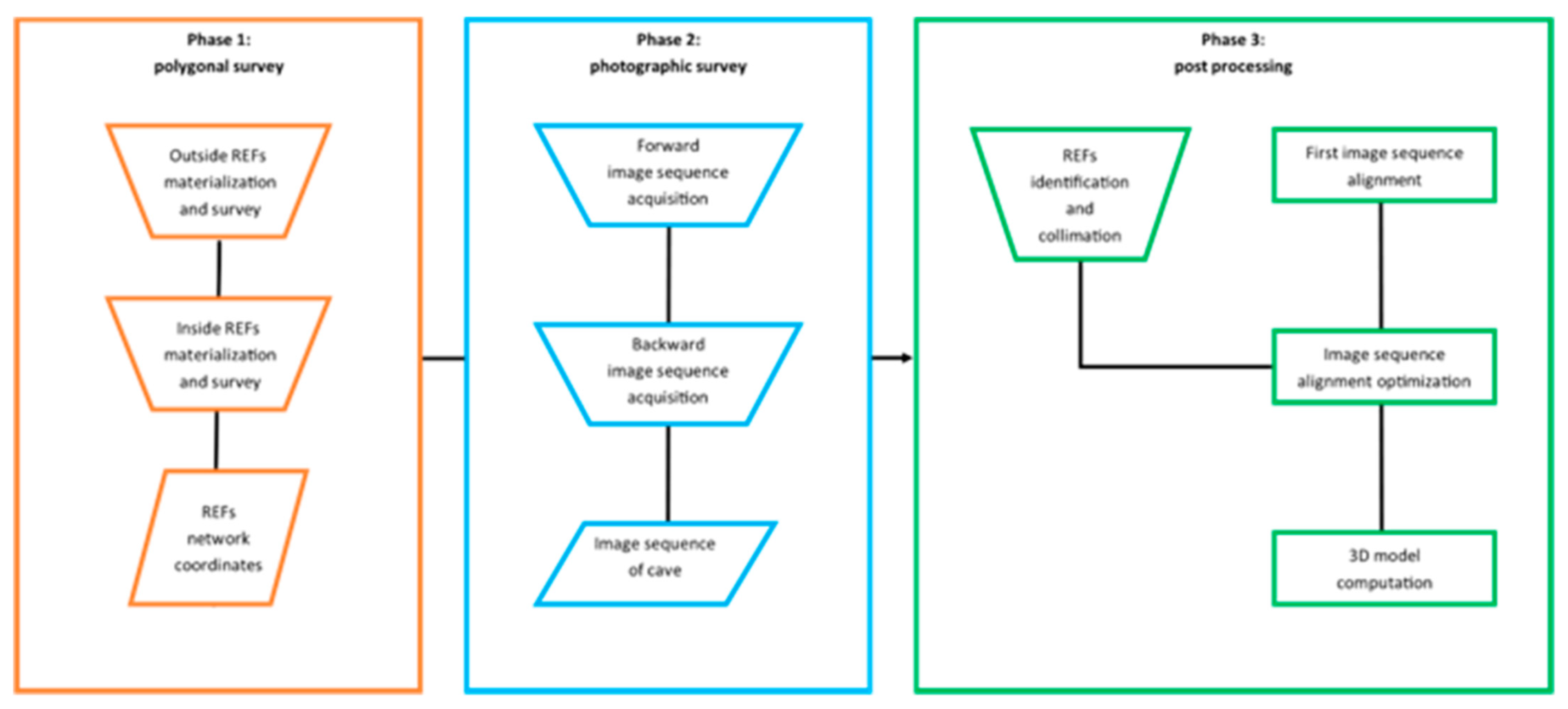
The proposed method is divided into three different phases (
Figure 3): (i) REF Polygonal survey; (ii) photographic survey; (iii) post-processing. Firstly, the cave needs to be located and framed by a topographic survey. This step is fundamental for the correct orientation and georeferencing of the photo sequence. The operation starts outside the cave by properly defining two, or more, reference benchmarks to refer the whole survey to a geographical reference system rather than a local one. Subsequently, measurements continue inside the cave by selecting a sequence of reference points on cave walls and features. The materialization of inner benchmarks should be carefully realized without damaging cave features and by minimizing the impact; for these reasons, a small varnish mark with color in contrast with the surroundings (e.g., red or orange) can be sufficient because the distance between the target and the photo camera is always limited. Additionally, to maximize its accuracy, the polygonal survey should be carried on twice in both directions to close the polygon. The survey phase of benchmarks is performed using a portable range finder capable of measuring and storing angles and distances contemporarily. The position of external reference points can be acquired using GNSS systems.
The subsequent phase is dedicated to the capture of the cave by the camera. Images should be captured in accordance with the principles of SfM thus varying the capture position in every picture and, contemporarily, assuring an adequate overlap. As the operation is carried out in a completely manual way, the capture should follow a squiggly path (
Figure 4) with the camera framing the cave in direction of the operator path. Due to the extreme variation of the cave’s size and shape, it is impossible to strictly define a priori acquisition parameters. The most critical elements are the required overlap (more than 70%) and the illumination of images; according to our experience, the use of flash is strongly discouraged as it doesn’t assure a diffuse illumination necessary for an adequate rendering of the cave in post-processing. Concerning the camera settings, they should vary according to the lighting conditions and size of the cave. The best way to illuminate the cave is to exploit the light mounted on the ‘caver’s helmet and, when it is possible, to place another operator ahead illuminating in the opposite direction. The device used in the current experiment is a superkikko (kikkolamp.com) set at 200 lumens in the corridors and 1400 lumen in the main chamber. In any case, the illumination should be indirect to avoid blinding effects on the camera sensor. The two presented phases are tightly connected and of high importance for the correct acquisition of the image sequence. Only with a good overlap and complete coverage of the cave, it is possible to obtain an excellent final result. Lastly, in the post-processing phase, all the acquired data (i.e., benchmarks’ coordinates and image sequence) are imported into the processing software where the cave 3D model is computed. The processing, which is subdivided into several stages, starts with recognizing and collimating reference points in every picture manually depicting them. Then, all the images are aligned according to their relative positions and input coordinates. It is essential to point out that, as the acquisition phase is done underground, the images are not provided by a shooting point coordinate. The aligned image set is then used to compute the 3D point cloud and the final model with mosaicked images draped on, resulting in the 3D reconstruction of the cave.
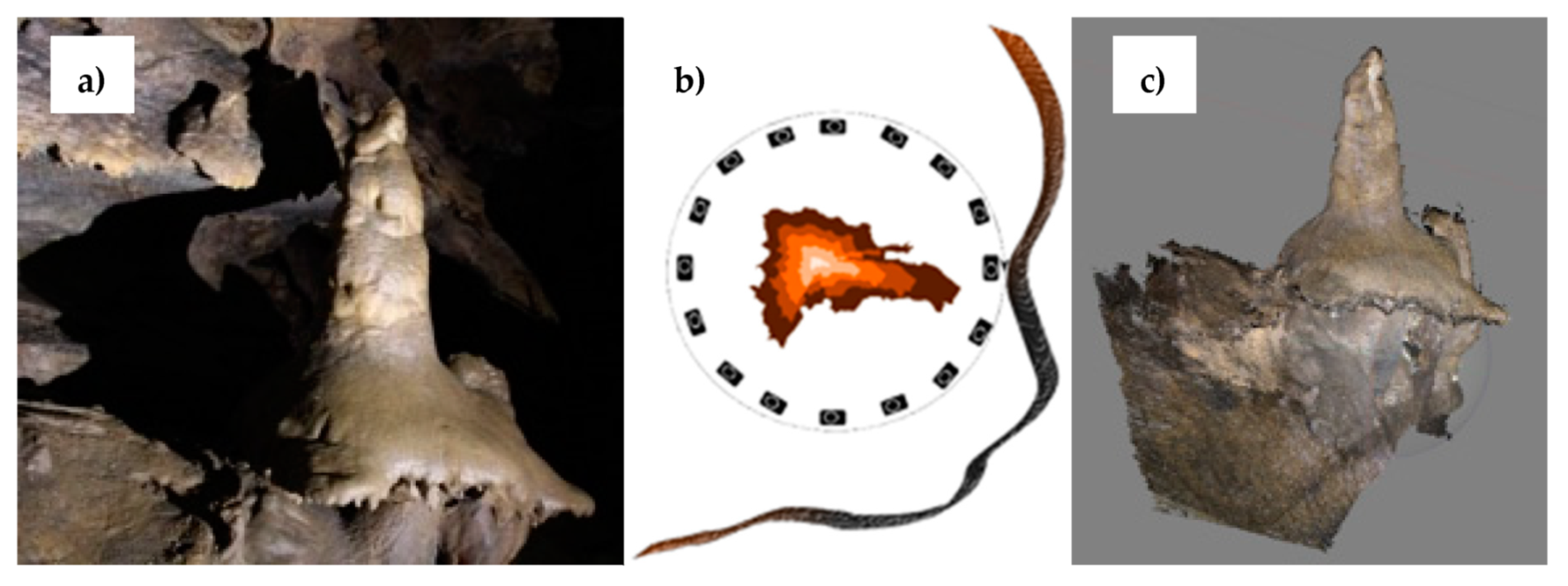
Using the same approach, it is possible to obtain a centimetric-resolution 3D model of the most interesting elements located inside the cave. In this case, the acquisition phase should be done by providing an ultra-high-resolution photo sequence of the target, obtained with a high-end digital camera. Increasing the resolution of the acquired data and processing settings it is possible to create a more detailed 3D model of the interior elements of the caves and provide a double-resolution model: a general medium-scale representation of the caves (1:500–1:1000 scale) with ultra-detailed models of the main elements of the cave at a centimeter resolution.
The medium resolution approach is mainly finalized to the acquisition of a continuous 3D model of the cave. This model’s final resolution is sufficient for a detailed reconstruction of the morphology of the cave but not so clear to obtain a correct visualization of the speleothems or the other essential elements that often enrich caves. The approach adopted for the ultra-high-resolution model acquisition is similar. Still, the number of images should be sufficient to guarantee both the complete description of the object and the capture of its character details. Their Ground Sample Distances (GSD) should be lower (up to millimeters) [
64].
These are the principles that must guide the operator in the images capture to assure the correct survey resolution of specific areas or objects within an underground cave: indeed, it is not possible to define a general acquisition scheme for these types of features, given their irregularity and variability in the morphology of the features, but the survey must be adapted from time to time, trying to cover the entire area of the object. To scale the model, as previously stated, it is necessary to know the relative position of some spread materialized REF points on the study area.
In the case of 3D acquisition of natural elements of particular value, it is helpful to exploit removable markers to guarantee the preservation of the surveyed elements or speleothems. Due to the limited space that often characterized the caves, the measurement of these points may be difficult, if not impossible, even with a portable range finder: in these cases, it is appropriate to take advantage of templates of known size to ensure proper scalability of the model to reduce the number of required reference points.
5. Conclusions
The establishment of new technologies, instruments, and algorithms for the execution and processing of three-dimensional surveys have expanded the possibility of performing such surveys in underground environments, like caves. The traditional approach was based on a series of reference points along the cave measured by clinometer and compass and led to a discrete representation of the cave. This method is currently improved by using laser portable range finders, which allow faster execution of measures and their storage in built-in memory or in an app. The methodology proposed and tested in the work is aimed to achieve a full three-dimensional reconstruction of the cave while assuring its accuracy in terms of positioning. To test the methodology, before the cave survey, a benchmark site was surveyed. A stretch of a tunnel was surveyed by TLS, PLS, and camera shooting. All the three-point clouds were registered to the reference targets with centimeter-level accuracy, i.e., 0.015, 0.010, and 0.012 m, respectively, allowing the following phases of the research. The tests provided that the point clouds obtained by PLS and by SfM processing of the shooting are in good agreement with the TLS one, selected as the reference data set. PLS-TLS comparison provided an average residual of 0.053 m while SfM-TLS 0.040 m. The tunnel was also selected as a test site thanks to the easy accessibility, which allowed to employ of bulky instrumentation. According to the test site result, we developed a methodology to survey natural caves adopting only a photo camera and SfM processing.
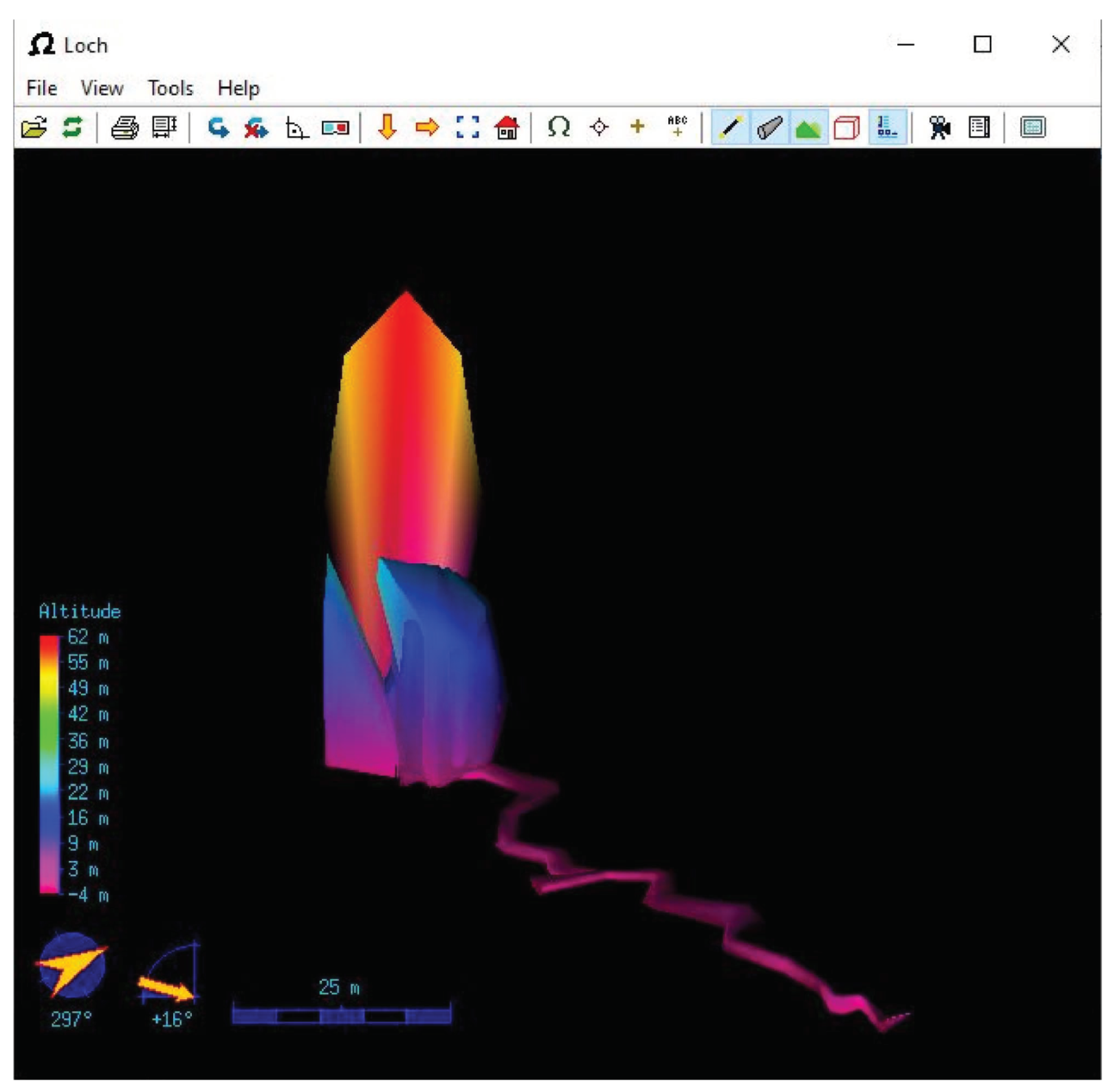
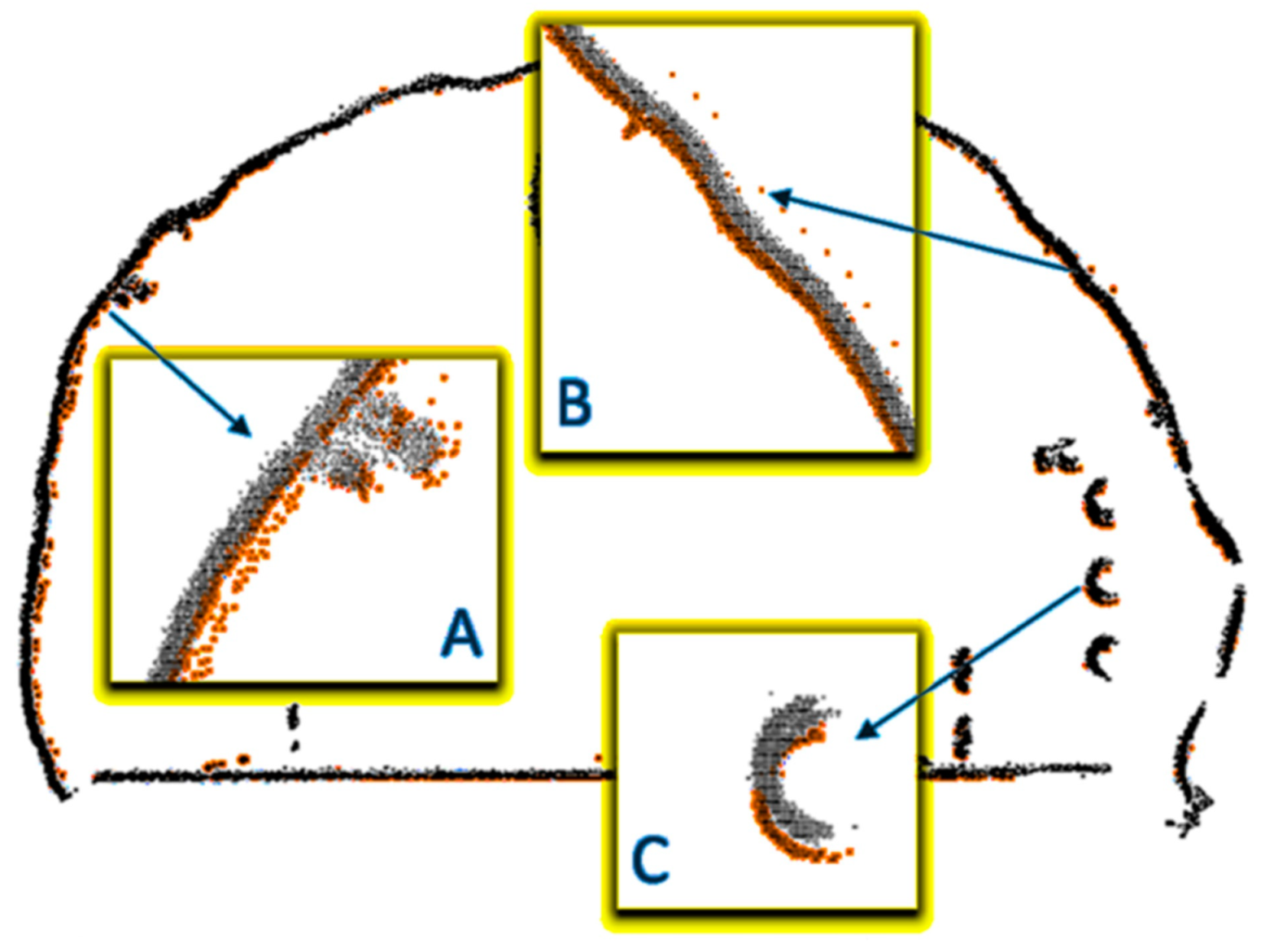
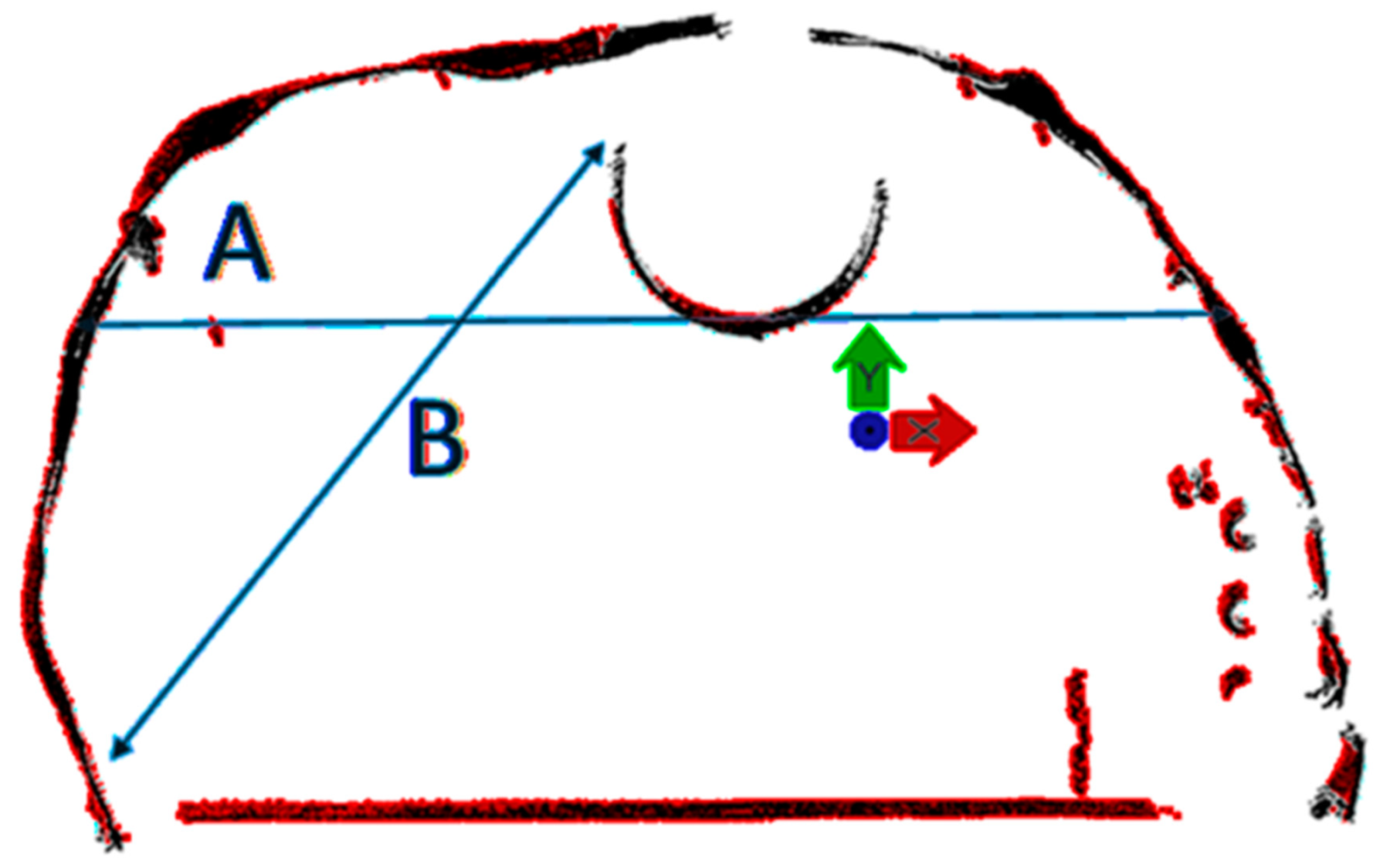
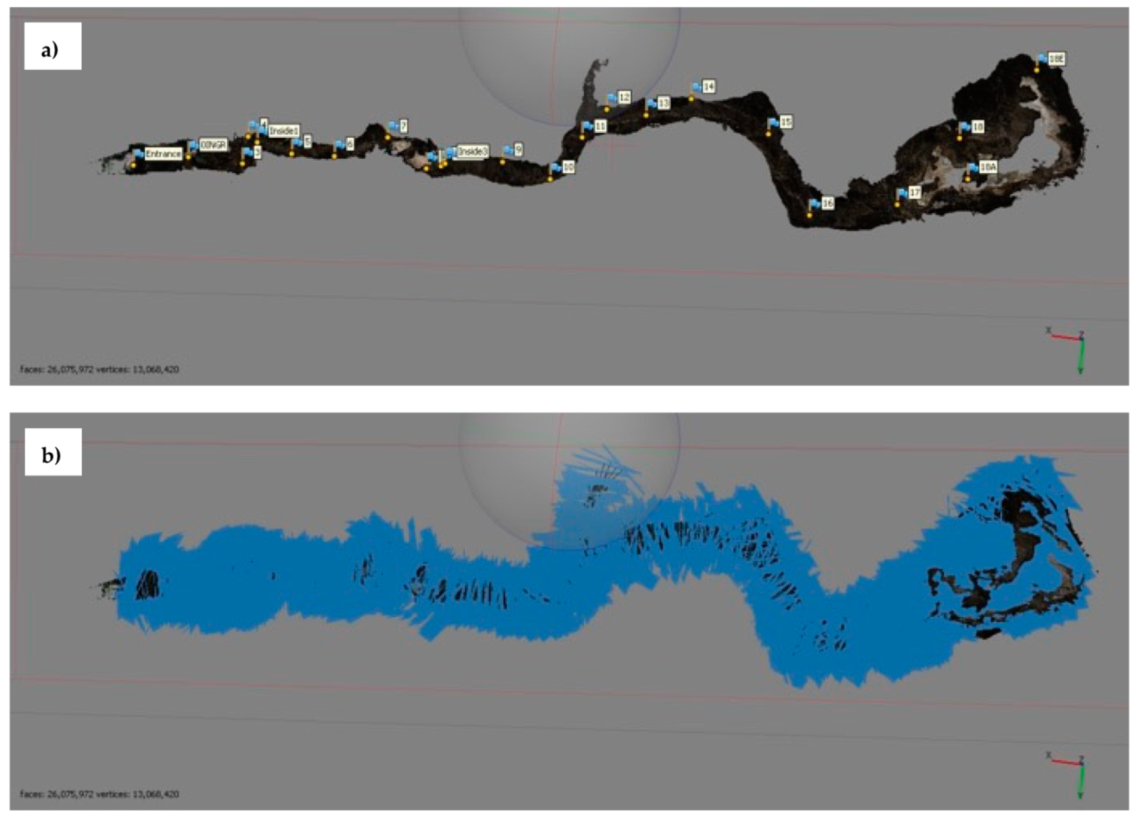
The proposed methodology is tested in the Gazzano cave, located in the Garessio municipality (Piemonte region, northwestern Italy). The cave is 105 m long, and it has several chambers, with a diameter that ranges from 37 m up to less than one meter. The cave was provided with several reference points surveyed by the cavers that were used as ground control points. According to the proposed methodology, the image acquisition was carried out in both directions from the entrance to the end of the cave and backward. The SfM processing provided the point cloud reconstructing the entire cave except for the final chamber whose ceiling was 25-m-high and images were not enough light. During the survey, a peculiar stalagmite was surveyed, too. This survey aimed to reconstruct a single object with a higher resolution if compared to the whole cave model. The reconstruction of this speleothem allowed to confirm the validity of the proposed method. The registering of the whole cave was carried out with an overall accuracy of 0.331 m; the scaling accuracy of the speleothem reached an overall accuracy of 0.0135 m.
By analyzing the benchmark and the cave survey, it was also possible to summarize the different survey methods’ pros and cons in underground contexts. Namely, SfM resulted in the most manageable and affordable, both in terms of equipment and processing software. On the contrary, PLS and, particularly, TLS are expensive and with less maneuverability. A possible solution, for cost reduction, is the use of available open-source alternatives of processing software which can, even if often lacking user-friendly interfaces, provide similar functionalities.


 ,
, 











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}


