
“Gymmy”: Designing and Testing a Robot for Physical and Cognitive Training of Older Adults

 ,
,
Abstract
:1. Introduction
- (a)
- Develop an advanced physical training robotic system that also includes cognitive training;
- (b)
- Evaluate how acceptance of the technology is influenced by individual characteristics (e.g., age and gender) and by success during training (i.e., how does success in specific exercises influence the acceptability of the technology as a whole?);
- (c)
- Compare acceptance of a robotic trainer that offers physical training only with one that combines physical and cognitive training.
2. System Development
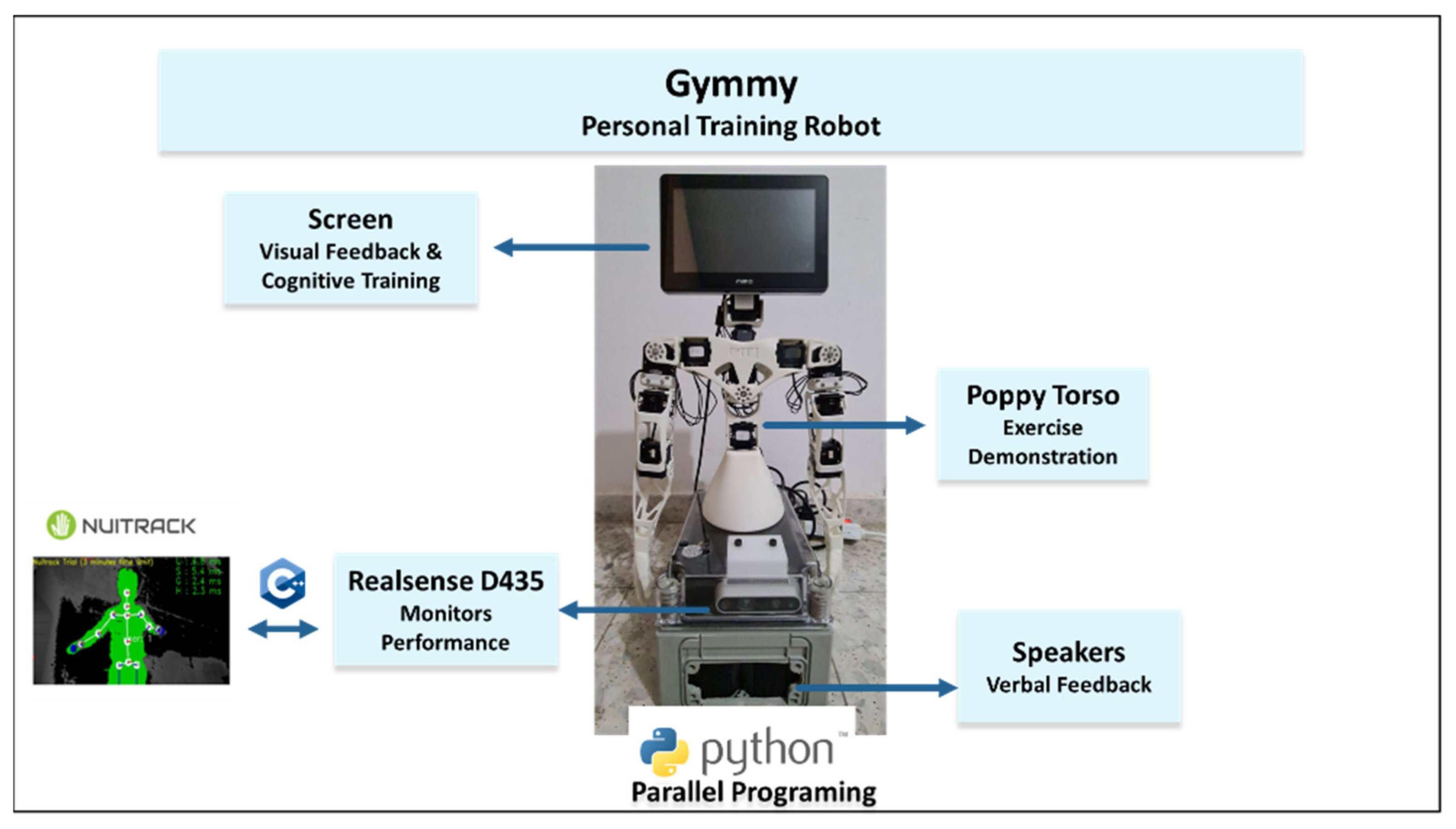
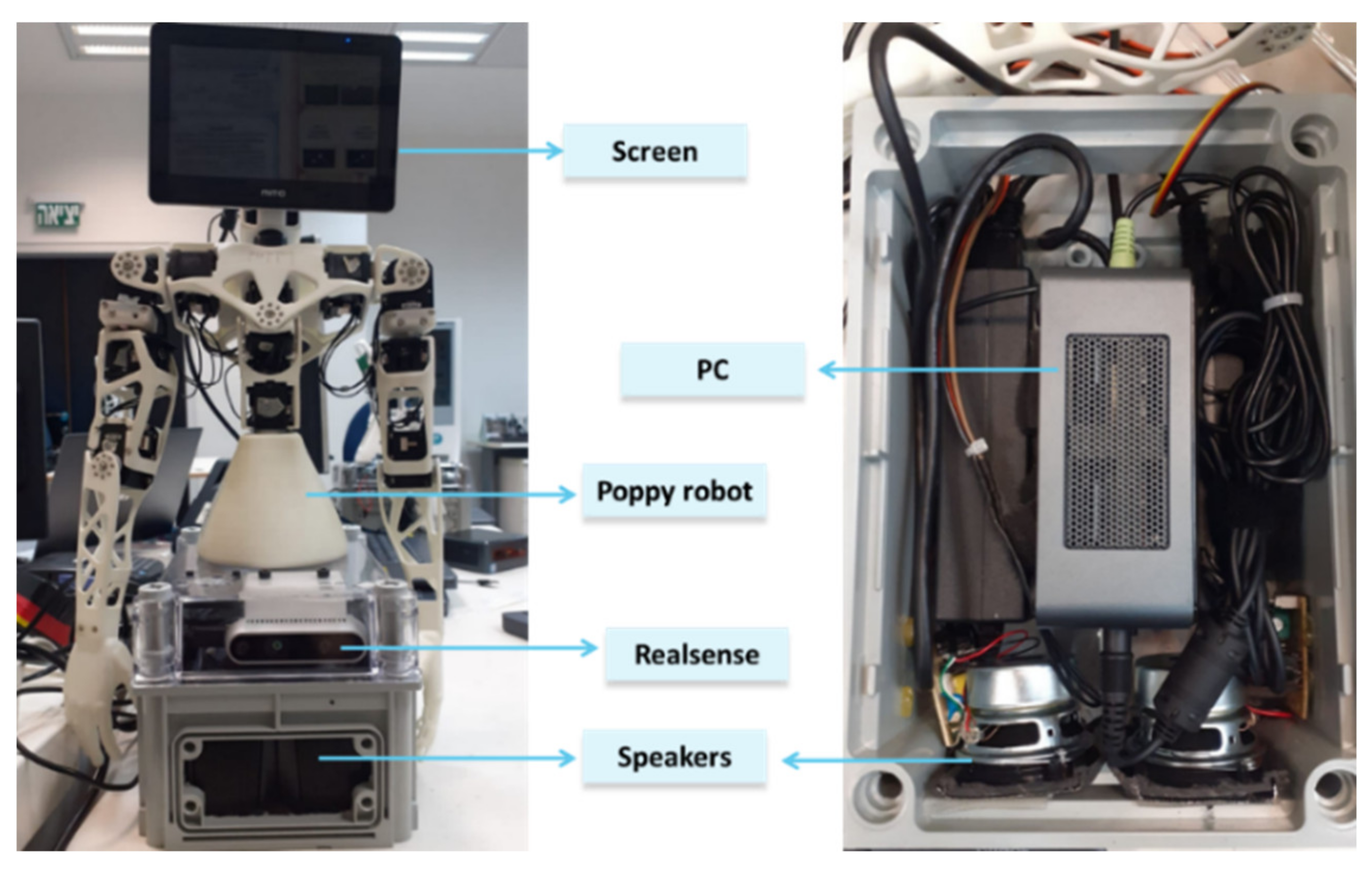
2.1. System Description
2.2. Hardware
- Realsense D435 Camera: An RGB depth camera by Intel measuring 90 mm × 25 mm × 25 mm was connected via USB 3. The RGB frame resolution was 1920 × 1080, and the depth output resolution was up to 1280 × 720.
- Touch screen: The original head was replaced by a 7-inch multitouch screen that was attached to the head motor with a component that was created by a 3D printer. This change was made in order to provide a bigger screen than the original, which was considered important for older adults. This also permitted the display of more information on the screen.
- The following system components were fitted inside a dedicated box:
- Nuc mini PC: A small Intel PC with an Intel® Core™ i5-8259U processor (2.30 GHz) was the core of the system and was connected to all system components via USB.
- Speakers: The speakers were placed in the front part of a dedicated box with a modified opening so that the audio signal could be easily heard.
2.3. Software
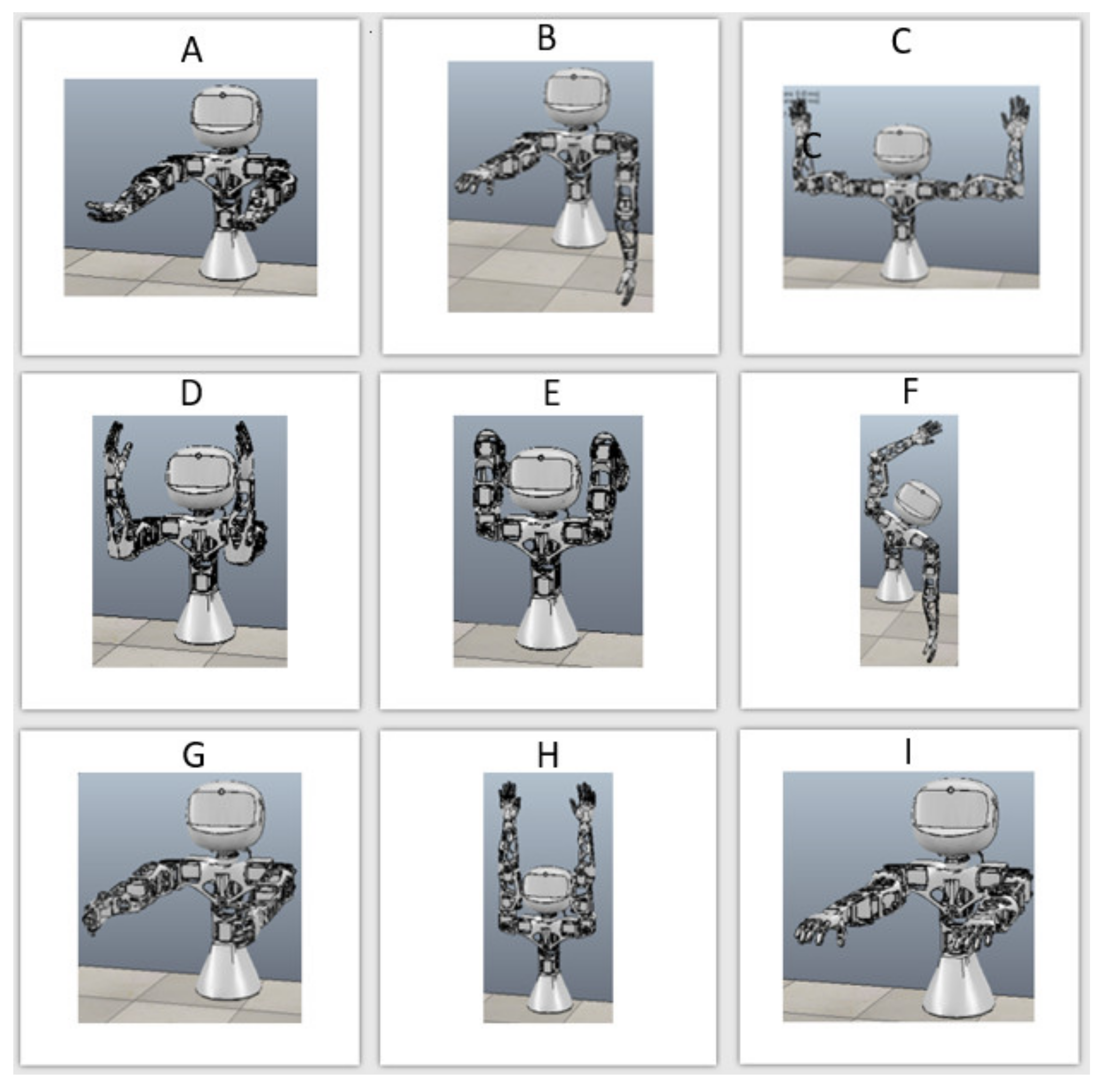
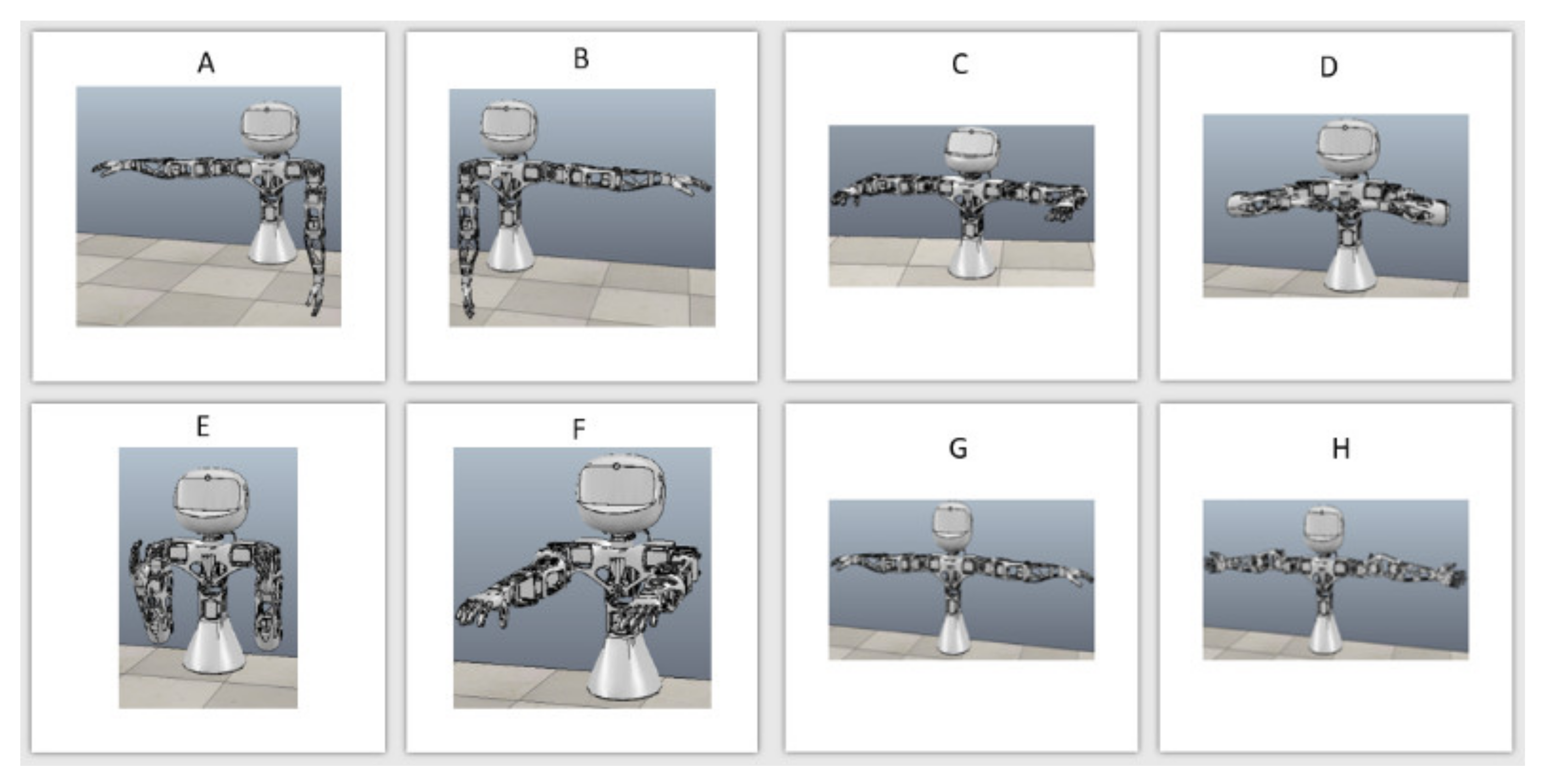
2.4. Development of Physical Exercises
2.5. Development of Cognitive Exercises
2.5.1. Game 1: Working Memory
2.5.2. Game 2: Spatial Memory
2.5.3. Game 3: Mathematical Skills
3. Methods
3.1. Experimental Procedure
3.2. Participants
3.3. Measures
3.4. Analysis
4. Results
4.1. Negative Attitude toward Robots
4.2. Post-Trial Questionnaires
4.2.1. Perceived Usefulness
4.2.2. Ease of Use
4.2.3. Attitude
4.2.4. Intention to Use
4.3. Technology Acceptance Model Relationships
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Murman, D.L. The Impact of Age on Cognition. Semin. Hear. 2015, 36, 111–121. [Google Scholar] [CrossRef]
- Christensen, H. What Cognitive Changes can be Expected with Normal Ageing? Aust. N. Z. J. Psychiatry 2001, 35, 768–775. [Google Scholar] [CrossRef] [PubMed]
- Chodzko-Zajko, W.J.; Proctor, D.N.; Singh, M.A.F.; Minson, C.T.; Nigg, C.R.; Salem, G.J.; Skinner, J.S. Exercise and Physical Activity for Older Adults. Med. Sci. Sports Exerc. 2009, 41, 1510–1530. [Google Scholar] [CrossRef]
- Trombetti, A.; Reid, K.F.; Hars, M.; Herrmann, F.; Pasha, E.P.; Phillips, E.M.; A Fielding, R. Age-associated declines in muscle mass, strength, power, and physical performance: Impact on fear of falling and quality of life. Osteoporos. Int. 2016, 27, 463–471. [Google Scholar] [CrossRef] [Green Version]
- Morley, E.J. Sarcopenia in the elderly. Fam. Pract. 2012, 29, i44–i48. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Williams, M.E.; Gaylord, S.A.; McGaghie, W.C. Timed Manual Performance in a Community Elderly Population. J. Am. Geriatr. Soc. 1990, 38, 1120–1126. [Google Scholar] [CrossRef]
- Torpy, J.M.; Lynm, C.; Glass, R.M. Frailty in Older Adults. JAMA 2006, 296, 2280. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Forman, D.E.; Berman, A.D.; McCabe, C.H.; Baim, D.S.; Wei, J.Y. PTCA in the Elderly: The ‘Young-Old’ versus the ‘Old-Old,’. J. Am. Geriatr. Soc. 1992, 40, 19–22. [Google Scholar] [CrossRef]
- Buerhaus, P.I. Current and Future State of the US Nursing Workforce. JAMA 2008, 300, 2422. [Google Scholar] [CrossRef]
- Oulton, J.A. The Global Nursing Shortage: An Overview of Issues and Actions. Policy Politics Nurs. Pract. 2006, 7, 34S–39S. [Google Scholar] [CrossRef]
- United Nations. World Population Prospects 2019, No. 141; United Nations: New York, NY, USA, 2019. [Google Scholar]
- Czaja, S.J.; Boot, W.R.; Charness, N.; Rogers, W.A. Designing for Older Adults; CRC Press: Boca Raton, FL, USA, 2019. [Google Scholar]
- World Health Organization. Global Recommendations on Physical Activity for Health; World Health Organization: Geneva, Switzerland, 2010; p. 60. [Google Scholar]
- Mowszowski, L.; Lampit, A.; Walton, C.; Naismith, S. Strategy-Based Cognitive Training for Improving Executive Functions in Older Adults: A Systematic Review. Neuropsychol. Rev. 2016, 26, 252–270. [Google Scholar] [CrossRef] [PubMed]
- Rebok, G.W.; Ball, K.K.; Guey, L.T.; Jones, R.; Kim, H.-Y.; King, J.W.; Marsiske, M.; Morris, J.N.; Tennstedt, S.L.; Unverzagt, F.W.; et al. Ten-Year Effects of the Advanced Cognitive Training for Independent and Vital Elderly Cognitive Training Trial on Cognition and Everyday Functioning in Older Adults. J. Am. Geriatr. Soc. 2014, 62, 16–24. [Google Scholar] [CrossRef]
- Corbett, A.; Owen, A.; Hampshire, A.; Grahn, J.; Stenton, R.; Dajani, S.; Burns, A.; Howard, R.; Williams, N.; Williams, G.; et al. The Effect of an Online Cognitive Training Package in Healthy Older Adults: An Online Randomized Controlled Trial. J. Am. Med. Dir. Assoc. 2015, 16, 990–997. [Google Scholar] [CrossRef] [PubMed]
- Matsusaka, Y.; Fujii, H.; Okano, T.; Hara, I. Health exercise demonstration robot TAIZO and effects of using voice command in robot-human collaborative demonstration. In Proceedings of the RO-MAN 2009—The 18th IEEE International Symposium on Robot and Human Interactive Communication, Toyama, Japan, 27 September–2 October 2009; pp. 472–477. [Google Scholar] [CrossRef]
- Bamidis, P.; Vivas, A.; Styliadis, C.; Frantzidis, C.; Klados, M.; Schlee, W.; Siountas, A.; Papageorgiou, S. A review of physical and cognitive interventions in aging. Neurosci. Biobehav. Rev. 2014, 44, 206–220. [Google Scholar] [CrossRef] [PubMed]
- Oswald, W.D.; Gunzelmann, T.; Rupprecht, R.; Hagen, B. Differential effects of single versus combined cognitive and physical training with older adults: The SimA study in a 5-year perspective. Eur. J. Ageing 2006, 3, 179–192. [Google Scholar] [CrossRef]
- Eggenberger, P.; Schumacher, V.; Angst, M.; Theill, N.; de Bruin, E.D. Does multicomponent physical exercise with simultaneous cognitive training boost cognitive performance in older adults? A 6-month randomized controlled trial with a 1-year follow-up. Clin. Interv. Aging 2015, 10, 1335–1349. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lauenroth, A.; Ioannidis, A.E.; Teichmann, B. Influence of combined physical and cognitive training on cognition: A systematic review. BMC Geriatr. 2016, 16, 141. [Google Scholar] [CrossRef] [Green Version]
- Patrick, H.; Canevello, A. Methodological overview of a self-determination theory-based computerized intervention to promote leisure-time physical activity. Psychol. Sport Exerc. 2011, 12, 13–19. [Google Scholar] [CrossRef] [Green Version]
- Huang, H.-C.; Pham, T.T.L.; Wong, A.M.-K.; Chiu, H.-Y.; Yang, Y.-H.; Teng, C.-I. How to create flow experience in exergames? Perspective of flow theory. Telemat. Inform. 2018, 35, 1288–1296. [Google Scholar] [CrossRef]
- Sussenbach, L.; Riether, N.; Schneider, S.; Berger, I.; Kummert, F.; Lutkebohle, I.; Pitsch, K. A robot as fitness companion: Towards an interactive action-based motivation model. In Proceedings of the 23rd IEEE International Symposium on Robot and Human Interactive Communication, Edinburgh, UK, 25–29 August 2014; pp. 286–293. [Google Scholar]
- Gadde, P.; Kharrazi, H.; Patel, H.; MacDorman, K.F. Toward Monitoring and Increasing Exercise Adherence in Older Adults by Robotic Intervention: A Proof of Concept Study. J. Robot. 2011, 2011, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Gorer, B.; Salah, A.A.; Akın, H.L. An autonomous robotic exercise tutor for elderly people. Auton. Robot. 2017, 41, 657–678. [Google Scholar] [CrossRef]
- Kim, G.H.; Jeon, S.; Im, K.; Kwon, H.; Lee, B.H.; Kim, G.Y.; Jeong, H.; Han, N.E.; Seo, S.W.; Cho, H.; et al. Structural brain changes after traditional and robot-assisted multi-domain cognitive training in community-dwelling healthy elderly. PLoS ONE 2015, 10, e0123251. [Google Scholar] [CrossRef]
- Fasola, J.; Matarić, M.J. A Socially Assistive Robot Exercise Coach for the Elderly. J. Hum. Robot. Interact. 2013, 2, 3–32. [Google Scholar] [CrossRef] [Green Version]
- Pu, L.; Moyle, W.; Jones, C.; Todorovic, M. The Effectiveness of Social Robots for Older Adults: A Systematic Review and Meta-Analysis of Randomized Controlled Studies. Gerontologist 2019, 59, e37–e51. [Google Scholar] [CrossRef]
- Zafrani, O.; Nimrod, G. Towards a Holistic Approach to Studying Human–Robot Interaction in Later Life. Gerontologist 2018, 59, e26–e36. [Google Scholar] [CrossRef] [PubMed]
- Pedersen, I.; Reid, S.; Aspevig, K. Developing social robots for aging populations: A literature review of recent academic sources. Sociol. Compass 2018, 12, e12585. [Google Scholar] [CrossRef]
- Kachouie, R.; Sedighadeli, S.; Khosla, R.; Chu, M.-T. Socially Assistive Robots in Elderly Care: A Mixed-Method Systematic Literature Review. Int. J. Hum. Comput. Interact. 2014, 30, 369–393. [Google Scholar] [CrossRef]
- Alves-Oliveira, P.; Petisca, S.; Correia, F.; Maia, N.; Paiva, A. Social Robots for Older Adults: Framework of Activities for Aging in Place with Robots. In Social Robotics. ICSR 2015. Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2015; pp. 11–20. [Google Scholar]
- Wilson, G.; Pereyda, C.; Raghunath, N.; de la Cruz, G.; Goel, S.; Nesaei, S.; Minor, B.; Schmitter-Edgecombe, M.; Taylor, M.E.; Cook, D.J. Robot-enabled support of daily activities in smart home environments. Cogn. Syst. Res. 2019, 54, 258–272. [Google Scholar] [CrossRef] [PubMed]
- Peleka, G.; Kargakos, A.; Skartados, E.; Kostavelis, I.; Giakoumis, D.; Sarantopoulos, I.; Doulgeri, Z.; Foukarakis, M.; Antona, M.; Hirche, S.; et al. RAMCIP—A Service Robot for MCI Patients at Home. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 1–9. [Google Scholar]
- Fischinger, D.; Einramhof, P.; Papoutsakis, K.; Wohlkinger, W.; Mayer, P.; Panek, P.; Hofmann, S.; Koertner, T.; Weiss, A.; Argyros, A.; et al. Hobbit, a care robot supporting independent living at home: First prototype and lessons learned. Robot. Auton. Syst. 2016, 75, 60–78. [Google Scholar] [CrossRef]
- Kostavelis, I.; Vasileiadis, M.; Skartados, E.; Kargakos, A.; Giakoumis, D.; Bouganis, C.-S.; Tzovaras, D. Understanding of Human Behavior with a Robotic Agent Through Daily Activity Analysis. Int. J. Soc. Robot. 2019, 11, 437–462. [Google Scholar] [CrossRef] [Green Version]
- Honig, S.S.; Oron-Gilad, T.; Zaichyk, H.; Sarne-Fleischmann, V.; Olatunji, S.; Edan, Y. Toward Socially Aware Person-Following Robots. IEEE Trans. Cogn. Dev. Syst. 2018, 10, 936–954. [Google Scholar] [CrossRef]
- Inagawa, M.; Takei, T.; Imanishi, E. Development of a Tower-type Cooking Robot. In Proceedings of the 2021 IEEE/SICE International Symposium on System Integration (SII), Iwaki, Fukushima, Japan, 11–14 January 2021; pp. 455–460. [Google Scholar]
- Olatunji, S.; Markfeld, N.; Gutman, D.; Givati, S.; Sarne-Fleischmann, V.; Oron-Gilad, T.; Edan, Y. Improving the Interaction of Older Adults with a Socially Assistive Table Setting Robot. In Social Robotics. ICSR 2019. Lecture Notes in Computer Science; Springer: Cham, Swizterland, 2019; pp. 568–577. [Google Scholar]
- Yin, J.; Apuroop, K.G.S.; Tamilselvam, Y.K.; Mohan, R.E.; Ramalingam, B.; Le, A.V. Table Cleaning Task by Human Support Robot Using Deep Learning Technique. Sensors 2020, 20, 1698. [Google Scholar] [CrossRef] [Green Version]
- Jevtić, A.; Valle, A.F.; Alenyà, G.; Chance, G.; Caleb-Solly, P.; Dogramadzi, S.; Torras, C. Personalized Robot Assistant for Support in Dressing. IEEE Trans. Cogn. Dev. Syst. 2018, 11, 363–374. [Google Scholar] [CrossRef]
- Canal, G.; Alenya, G.; Torras, C. Adapting robot task planning to user preferences: An assistive shoe dressing example. Auton. Robot. 2018, 43, 1343–1356. [Google Scholar] [CrossRef] [Green Version]
- Liu, F.; Yu, H.; Wei, W.; Qin, C. I-feed: A robotic platform of an assistive feeding robot for the disabled elderly population. Technol. Health Care 2020, 28, 1–5. [Google Scholar] [CrossRef]
- Park, D.; Hoshi, Y.; Mahajan, H.P.; Kim, H.K.; Erickson, Z.; Rogers, W.A.; Kemp, C.C. Active robot-assisted feeding with a general-purpose mobile manipulator: Design, evaluation, and lessons learned. Robot. Auton. Syst. 2020, 124, 103344. [Google Scholar] [CrossRef]
- Zsiga, K.; Tóth, A.; Pilissy, T.; Péter, O.; Dénes, Z.; Fazekas, G. Evaluation of a companion robot based on field tests with single older adults in their homes. Assist. Technol. 2017, 30, 259–266. [Google Scholar] [CrossRef] [PubMed]
- Jecker, N.S. You’ve got a friend in me: Sociable robots for older adults in an age of global pandemics. Ethic Inf. Technol. 2020, 1–9. [Google Scholar] [CrossRef] [PubMed]
- Avioz-Sarig, O. Robotic System for Physical Training of Older Adults. Master’s Thesis, Ben-Gurion University of the Negev, Beersheba, Israel, 2019. [Google Scholar]
- Yuan, F.; Klavon, E.; Liu, Z.; Lopez, R.P.; Zhao, X. A Systematic Review of Robotic Rehabilitation for Cognitive Training. Front. Robot. AI 2021, 8, 1–24. [Google Scholar] [CrossRef]
- Abdi, J.; Al-Hindawi, A.; Ng, T.; Vizcaychipi, M. Scoping review on the use of socially assistive robot technology in elderly care. BMJ Open 2018, 8, e018815. [Google Scholar] [CrossRef] [Green Version]
- Matarić, M.J.; Scassellati, B. Socially Assistive Robotics. In Springer Handbook of Robotics; Springer Science and Business Media LLC: Cham, Switzerland, 2016; pp. 1973–1994. [Google Scholar]
- SBU. Methods of Promoting Physical Activity: A Systematic Review; Swedish Council on Health Technology Assessment in Health Care: Stockholm, Sweden, 2007.
- Chase, J.-A.D. Interventions to Increase Physical Activity Among Older Adults: A Meta-Analysis. Gerontologist 2014, 55, 706–718. [Google Scholar] [CrossRef] [Green Version]
- Csikszentmihalyi, M. Beyond Boredom and Anxiety: The Experience of Games in Work and Play; Jossey-Bass Inc.: San Francisco, CA, USA, 1975. [Google Scholar]
- Deci, E.L.; Ryan, R.M. Intrinsic Motivation and Self-Determination in Human Behavior; Springer: New York, NY, USA, 1985. [Google Scholar]
- Fasola, J.; Mataric, M.J. Using Socially Assistive Human–Robot Interaction to Motivate Physical Exercise for Older Adults. Proc. IEEE 2012, 100, 2512–2526. [Google Scholar] [CrossRef]
- Avioz-Sarig, O.; Olatunji, S.; Sarne-Fleischmann, V.; Edan, Y. Robotic System for Physical Training of Older Adults. Int. J. Soc. Robot. 2020, 1–16. [Google Scholar] [CrossRef]
- Heerink, M. Exploring the influence of age, gender, education and computer experience on robot acceptance by older adults. In Proceedings of the 6th International Conference on Human-Robot Interaction, Lausanne, Switzerland, 6–9 March 2011; pp. 147–148. [Google Scholar]
- Giuliani, M.; Scopelliti, M.; Fornara, F. Elderly people at home: Technological help in everyday activities. In Proceedings of the IEEE International Workshop on Robot and Human Interactive Communication, Nashville, TN, USA, 13–15 August 2005; pp. 365–370. [Google Scholar] [CrossRef]
- Louie, W.-Y.G.; McColl, D.; Nejat, G. Acceptance and Attitudes Toward a Human-like Socially Assistive Robot by Older Adults. Assist. Technol. 2014, 26, 140–150. [Google Scholar] [CrossRef] [PubMed]
- Lapeyre, M.; Rouanet, P.; Oudeyer, P.-Y. The poppy humanoid robot: Leg design for biped locomotion. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 349–356. [Google Scholar]
- Devanne, M.; Nguyen, S.M. Multi-level motion analysis for physical exercises assessment in kinaesthetic rehabilitation. In Proceedings of the 2017 IEEE-RAS 17th International Conference on Humanoid Robotics (Humanoids), Birmingham, UK, 15–17 November 2017; pp. 529–534. [Google Scholar]
- Taltal, S. A Computerized System for Measuring the Risk of Falls among the Elderly Through a Six-Meter Walking Test on a Narrow Path. Bachelor’s Thesis, Ben-Gurion University of the Negev, Beersheba, Israel, 2021. [Google Scholar]
- Vogel, T.; Brechat, P.-H.; Leprêtre, P.-M.; Kaltenbach, G.; Berthel, M.; Lonsdorfer, J. Health benefits of physical activity in older patients: A review. Int. J. Clin. Pract. 2009, 63, 303–320. [Google Scholar] [CrossRef]
- Roy, N.; Baltus, G.; Fox, D.; Gemperle, F.; Goetz, J.; Hirsch, T.; Magaritis, D.; Montemerlo, M.; Pineau, J.; Roy, N.; et al. Towards Personal Service Robots for the Elderly. Work. Interact. Robot. Entertain. 2000, 25, 184. [Google Scholar]
- Ezzati, A.; Katz, M.J.; Zammit, A.R.; Lipton, M.L.; Zimmerman, M.E.; Sliwinski, M.J.; Lipton, R.B. Differential association of left and right hippocampal volumes with verbal episodic and spatial memory in older adults. Neuropsychology 2016, 93, 380–385. [Google Scholar] [CrossRef] [Green Version]
- Nacke, L.; Nacke, A.; Lindley, C. Brain Training for Silver Gamers: Effects of Age and Game Form on Effectiveness, Efficiency, Self-Assessment, and Gameplay Experience. CyberPsychol. Behav. 2009, 12, 493–499. [Google Scholar] [CrossRef]
- Katz, J.E.; Halpern, D. Attitudes towards robots suitability for various jobs as affected robot appearance. Behav. Inf. Technol. 2013, 33, 941–953. [Google Scholar] [CrossRef]
- Mullen, S.P.; Olson, A.E.; Phillips, S.M.; Szabo, A.N.; Wójcicki, T.R.; Mailey, E.L.; Gothe, N.P.; Fanning, J.T.; Kramer, A.; McAuley, E. Measuring enjoyment of physical activity in older adults: Invariance of the physical activity enjoyment scale (paces) across groups and time. Int. J. Behav. Nutr. Phys. Act. 2011, 8, 103. [Google Scholar] [CrossRef] [Green Version]
- Davis, F.D. Perceived Usefulness, Perceived Ease of Use, and User Acceptance of Information Technology. MIS Q. 1989, 13, 319–340. [Google Scholar] [CrossRef] [Green Version]
- Ma, Q.; Chan, A.H.; Chen, K. Personal and other factors affecting acceptance of smartphone technology by older Chinese adults. Appl. Ergon. 2016, 54, 62–71. [Google Scholar] [CrossRef] [PubMed]
- Sundar, S.S.; Waddell, T.F.; Jung, E.H. The Hollywood Robot Syndrome media effects on older adults’ attitudes toward robots and adoption intentions. In Proceedings of the 2016 11th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Christchurch, New Zealand, 7–10 March 2016; pp. 343–350. [Google Scholar]
- Sidaway, B.; Ala, B.; Baughman, K.; Glidden, J.; Cowie, S.; Peabody, A.; Roundy, D.; Spaulding, J.; Stephens, R.; Wright, D.L. Contextual Interference Can Facilitate Motor Learning in Older Adults and in Individuals with Parkinson’s Disease. J. Mot. Behav. 2016, 48, 509–518. [Google Scholar] [CrossRef] [PubMed]
- Kumar, S.; Itzhak, E.; Olatunji, S.; Sarne-Fleischmann, V.; Tractinsky, N.; Nimrod, G.; Edan, Y. Exploratory evaluation of politeness in human-robot interaction. arXiv 2021, arXiv:2103.08441. [Google Scholar]
- Šabanović, S.; Chang, W.-L.; Bennett, C.C.; Piatt, J.A.; Hakken, D. A Robot of My Own: Participatory Design of Socially Assistive Robots for Independently Living Older Adults Diagnosed with Depression. In Human Aspects of IT for the Aged Population. Design for Aging. ITAP 2015. Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2015; pp. 104–114. [Google Scholar]
- Ostrowski, A.K.; DiPaola, D.; Partridge, E.; Park, H.W.; Breazeal, C. Older Adults Living with Social Robots: Promoting Social Connectedness in Long-Term Communities. IEEE Robot. Autom. Mag. 2019, 26, 59–70. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| NARS | |
|---|---|
| S3 | I would feel relaxed talking with robots. |
| S2 | I would feel uneasy if I were given a job where I had to use robots. |
| The idea that robots can make judgments about things excites me. | |
| I would feel very nervous standing in front of a robot. | |
| S1 | I feel that if I depend on robots too much, something bad might happen. |
| Dependent Variable | Measure | |
|---|---|---|
| Perceived Usefulness | I would be willing to train with the robot again because it had value to me. | |
| Ease of Use | Comfort | I felt comfortable during the interaction. I felt nervous during the activity. |
| Understanding | I understood the robot well during the interaction. | |
| Effort | I put a lot of effort into this activity. | |
| Attitude | Engagement | I concentrated on the activity for the entire session. |
| Trust | I felt like I could really trust this robot. | |
| Satisfaction | I was satisfied by the robot’s performance during this activity. | |
| Enjoyment | I enjoy exercising with the robot. | |
| PACES Questionnaire | ||
| Intention to Use | I would like to exercise with the robot in the future. | |
| Success Rate | ||
| Physical Activity Enjoyment Scale | ||||||||
|---|---|---|---|---|---|---|---|---|
| I find it pleasurable | 1 | 2 | 3 | 4 | 5 | 6 | 7 | I find it unpleasurable |
| It is no fun at all | 1 | 2 | 3 | 4 | 5 | 6 | 7 | It is a lot of fun |
| It is very pleasant | 1 | 2 | 3 | 4 | 5 | 6 | 7 | It is very unpleasant |
| It is very invigorating | 1 | 2 | 3 | 4 | 5 | 6 | 7 | It is not at all invigorating |
| It is very gratifying | 1 | 2 | 3 | 4 | 5 | 6 | 7 | It is not at all gratifying |
| It is very exhilarating | 1 | 2 | 3 | 4 | 5 | 6 | 7 | It is not at all exhilarating |
| It is not at all stimulating | 1 | 2 | 3 | 4 | 5 | 6 | 7 | It is very stimulating |
| It is very refreshing | 1 | 2 | 3 | 4 | 5 | 6 | 7 | It is not at all refreshing |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Krakovski, M.; Kumar, S.; Givati, S.; Bardea, M.; Zafrani, O.; Nimrod, G.; Bar-Haim, S.; Edan, Y. “Gymmy”: Designing and Testing a Robot for Physical and Cognitive Training of Older Adults. Appl. Sci. 2021, 11, 6431. https://doi.org/10.3390/app11146431
Krakovski M, Kumar S, Givati S, Bardea M, Zafrani O, Nimrod G, Bar-Haim S, Edan Y. “Gymmy”: Designing and Testing a Robot for Physical and Cognitive Training of Older Adults. Applied Sciences. 2021; 11(14):6431. https://doi.org/10.3390/app11146431
Chicago/Turabian StyleKrakovski, Maya, Shikhar Kumar, Shai Givati, Moshe Bardea, Oded Zafrani, Galit Nimrod, Simona Bar-Haim, and Yael Edan. 2021. "“Gymmy”: Designing and Testing a Robot for Physical and Cognitive Training of Older Adults" Applied Sciences 11, no. 14: 6431. https://doi.org/10.3390/app11146431
APA StyleKrakovski, M., Kumar, S., Givati, S., Bardea, M., Zafrani, O., Nimrod, G., Bar-Haim, S., & Edan, Y. (2021). “Gymmy”: Designing and Testing a Robot for Physical and Cognitive Training of Older Adults. Applied Sciences, 11(14), 6431. https://doi.org/10.3390/app11146431